Težište - Mehanika, biomehanika, robotika, generalizovani … … · Mašinski fakultet, Beograd...
5
Mašinski fakultet, Beograd - Mehanika 1 – Predavanje 9 1 Težište Određivanje položaja centra (središta) sistema vezanih paralelnih sila (F 0) R r ≠ (M F) o R r r ⊥ 0 = ) F ( M )= F ( M i i A A ∑ r r r r r ( ) r r ρ i i i F × = ∑ 0 r r r r r i i = + ρ (r r) F=0 i i r r r − × ∑ i r r r r r F r F i i i i i ∑ ∑ × − × = 0 r r F Fu i i = r r r r Fu r Fu r i i i i i ∑ ∑ × − × = 0 , ( F r F) i i i u=0 r r r r i i − × ∑ ∑ ( F r F) u=0 i C i i r r r r i i − × ∑ ∑ Neka se sada pretpostavi da su sile posmatranog sistema vezane za svoje napadne tačke (sistem vezanih paralelnih sila). Geometrijska tačka kroz koju prolazi napadna linija rezultante sistema vezanih paralelnih sila (tačka C), čiji položaj se ne menja, pri bilo kom zaokretanju svih sila oko svojih napadnih tačaka za isti ugao (za bilo koju osu Ou), naziva se centar (središte) sistema vezanih paralelnih sila. r r r Fr F C ii i i i = ∑ ∑ r r r Fr F C ii i = ∑ r x Fx F y Fy F z Fz F C i i i C i i i C i i i = = = ∑ ∑ ∑ r r , , r r Veličina i ∑ naziva se statički moment sistema vezanih paralelnih sila u odnosu na centar O. Brojioci u prethodnim izrazima predstavljaju statičke momente sistema vezanih paralelnih sila u odnosu na ravni Oyz, Oxz i Oxy, respektivno. Fr i i Težište tela Geometrijska tačka kroz koju prolazi napadna linija rezultante sila Zemljine teže svih delića tela pri bilo kom položaju tela u prostoru, naziva se težište tela . r r G G i i = ∑ ∆ r r r r G C i i = ∑ ∆G i x x G y C i i y G z z G C i i C i i = = = ∑ ∑ ∑ ∆ ∆ ∆ G G G i i i , , γ i = ∆ ∆ G V i i r r r r C i i i i i = ∑ ∑ γ γ ∆ ∆ V V i i Kod nehomogenih tela - γ (x, y,z) = lim G V G V V i i V 0 i ∆ ∆ ∆ ∆ ∆ ∆ → → = 0 lim
Transcript of Težište - Mehanika, biomehanika, robotika, generalizovani … … · Mašinski fakultet, Beograd...

Mašinski fakultet, Beograd - Mehanika 1 – Predavanje 9 1
Težište Određivanje položaja centra (središta) sistema vezanih paralelnih sila
(F 0)R
r≠
(M F )o R
r r⊥
0=)F(M)=F(Mi
iAA ∑rrrr
r
( )
r rρi i
i
F× =∑ 0 r r rr ri i= + ρ
(r r) F = 0i ir r r− ×∑
i
r r r rr F r Fi
ii i
i∑ ∑× − × = 0
r rF Fui i= r r r rFur Fu ri
ii i
i∑ ∑× − × = 0 ,
( F r F )i ii
u = 0r r rrii
− ×∑ ∑
( F r F ) u = 0i C ii
r r rrii
− ×∑ ∑
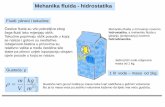
Neka se sada pretpostavi da su sile posmatranog sistema vezane za svoje napadne tačke (sistem vezanih paralelnih sila). Geometrijska tačka kroz koju prolazi napadna linija rezultante sistema vezanih paralelnih sila (tačka C), čiji položaj se ne menja, pri bilo kom zaokretanju svih sila oko svojih napadnih tačaka za isti ugao (za bilo koju osu Ou), naziva se centar (središte) sistema vezanih paralelnih sila.
r
r
rFr
FC
i ii
ii
=∑∑
rr
rFr
FC
i ii=∑
r
xF x
Fy
F y
Fz
F z
FC
i ii
C
i ii
C
i ii= = =
∑ ∑ ∑r r
, ,r
r
Veličina i∑ naziva se statički moment sistema vezanih paralelnih sila u odnosu na
centar O. Brojioci u prethodnim izrazima predstavljaju statičke momente sistema vezanih paralelnih sila u odnosu na ravni Oyz, Oxz i Oxy, respektivno.
F ri i
Težište tela
Geometrijska tačka kroz koju prolazi napadna linija rezultante sila Zemljine teže svih delića tela pri bilo kom položaju tela u prostoru, naziva se težište tela.
r rG Gi
i
= ∑∆ rr
rr
GC
ii=∑∆Gi
xx
GyC
ii
y
Gz
z
GC
ii
C
ii= = =
∑ ∑ ∑∆ ∆ ∆G G Gi i i
, ,
γ i =∆∆
GV
i
i
rr
rrC
i ii
ii
=∑∑γ
γ
∆
∆
V
V
i
i
Kod nehomogenih tela - γ(x, y,z)= lim GV
GVV
i
iV 0i∆ ∆
∆∆
∆∆→ →
=0
lim

Mašinski fakultet, Beograd - Mehanika 1 – Predavanje 9 2
Kod homogenog tela γ γi const= = ., ∆ ∆G Vi i= ⋅ = ⋅γ γ, G V
rr
rr
VC
ii=∑∆Vi
xx
Vy
y
Vz
z
VC
ii
C
ii
C
ii= = =
∑ ∑ ∑∆ ∆V Vi i
, ,∆Vi
∆G Si i= =γ∆ γh G,
Sh rr
rr
SC
ii=∑∆Si
r
LSγG,LSγG ii =∆=∆ rrr
LC
ii=∑∆Li
Metode za određivanje težišta homogenih tela
Metoda simetrije homogenih tela
dređivanje težišta tela koje ima ravan simetrije
Težište homogenog tela, koje ima ravan etrij
i j
O sim e, nalazi se u toj ravni.
x x y yi j i j z z= = = −, , ∆ ∆V Vi jz zi j+ = 0
∆Vk zk
k
n
=∑ =
10
∆Vk z z Vkk
n
C=∑ =
1
zC = 0
dređivanje težišta tela koje ima osu simetrije
etrij
O
Tezište homogenog tela koje ima osu sim e nalazi se na toj osi.
x x y y z zi j i j i j= − = − =, , ∆ ∆ ∆ ∆V Vi jy yi jV Vi jx xi j+ = + =0 0 ,
x yC C= = 0
dređivanje težišta tela koje ima centar simetrije
O

Mašinski fakultet, Beograd - Mehanika 1 – Predavanje 9 3
Težište homogenog tela koje ima centar simetrije nalazi se u toj tački.
= −x x y y z zi j i j i j= − = −, , x y zC C C= = = 0
Računska metoda određivanja položaja težišta tela
r
r
rrdV
dVC
V
V
=r
rlim r
n
∫r
limC
i ii
i
n=→∞
=
→∞
∑ Vγ ∆
i=∑
n i
n iVγ ∆
1
1
∫
γ
γ
G dV=r rr
GrdVC
V
= ∫1 γ
V∫ γ
xG
xdV yG
ydV zG
zdVCV
CV
CV
= =∫ ∫ ∫1 1 1
γ γ γ, , =
( = const. )γ xV
xdV yV
ydV zV
zdVCV
CV
CV
= = =∫ ∫1 1 1, , ∫
SxdS y
SydS z
SzdSC
SC
SC
S
= = =∫ ∫ ∫1 1 1, , x
xS
xdS yS
ydSCS
CS
= =∫ ∫1 1,
xL
xdL yL
ydL zL
zdLCL
CL
CL
= = =∫ ∫1 1
∫, ,
Metoda rastavljanja
1
r rrG
G rC ii
n
= i=∑1
1
xG
x yG
G y zG
G zC i ii
C i ii
C i ii
= = =∑ ∑ ∑1 1 1, , G
xV
V x yV
V y zVC i i
iC i i
i
= =∑ ∑1 1, , V zC i ii
= ∑1
xS
S x yS
S y zSC i i
iC i i
i
= =∑ ∑1 1, , S zC i ii
= ∑1
xL
L x yL
L y zC i ii
C i ii
= =∑ ∑1 1, ,
Metoda "negativnih" težina
LL zC i i
i
= ∑1
rrr
G G
C C i ii
C ii
k=+
=
rG r Gk
+r∑
=∑
1
1
r
r r
rGr G r
G GC
i ii
k
ii
k=+ −
+ −
=
=
∑
∑
( )
( )
1
1

Mašinski fakultet, Beograd - Mehanika 1 – Predavanje 9 4
G G GC ii
k
= +=∑
1
Eksperimentalne metode za određivanje težišta tela
- metoda vešanja. - metoda merenja vagom a F l. M (F )= 0A i
i
r∑
GB=
a F lF F
B
A B
=+
M (F )= 0A i
i
r∑ , FB (b+
b acos
d) Gb = 0−
= −α α+(h r)sinb+d = lcosα
,
h r F l GaG
ctgB= +−
α
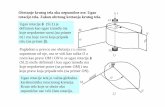
Guldinove teoreme
Teorema 1: Površina koja nastaje obrpreseca, a koja pripada ravni krive, jednaka pređe njegovo težište pri tom obrtanju.
tanjem luka ravne krive oko ose koju luk ne je proizvodu dužine datog luka i dužine puta koji
Dokaz: dLxdS ϕ=
S xdL=L∫ϕ
xdL LxCL
=∫
S LxC= ϕ S LOC=

Mašinski fakultet, Beograd - Mehanika 1 – Predavanje 9 5
Teorema 2: Zapremina koja nastaje obrtanjem ravne figure oko ose koja je ne reseca, a koja pripada ravni figure, jednaka je proizvodu površine ravne figure i dužine puta oji pređe težište ravne figure pri tom obrtanju.
Dokaz
pk
:
dSxdV ϕ=
V xdS= ∫ϕ S
xdS SxCS
=∫
V SxC= ϕ V SOC=
Te
žište tetraedra
AHHF
EGGF
= =21
AFHF
AEGH
= =31
AEGH
ECCH
=
ECCH
=31
EH EC CH= + CH EH=
14