VEKTOR MOMENTA SILE ZA TA ČKU Vektor momenta sile, kojapolj.uns.ac.rs/~mehanika/4 momenti sila i...
18
VEKTOR MOMENTA SILE ZA TAČKU F AB M F A r r r × = Vektor momenta sile, koja dejstvuje na neku tačku tela, za proizvoljno izabranu tačku predstavlja meru obrtnog dejstva sile u odnosu na tu proizvoljno izabranu tačku. Intenzitet vektora momenta sile za tačku iznosi h F AB F M F A ⋅ = θ ⋅ ⋅ = sin r r Rastojanje h, koje leži u ravni π koju obrazuju napadna linija sile i momentna tačka, predstavlja najkraće rastojanje između napadne linije sile i momentne tačke, i naziva se krakom sile za tačku A. Ovde je tačka A momentna tačka a tačka B napadna tačka sile F r
Transcript of VEKTOR MOMENTA SILE ZA TA ČKU Vektor momenta sile, kojapolj.uns.ac.rs/~mehanika/4 momenti sila i...
VEKTOR MOMENTA SILE ZA TA ČKU
FABM FA
rr r
×=
Vektor momenta sile, kojadejstvuje na neku tačku tela, zaproizvoljno izabranu tačkupredstavlja meru obrtnogdejstva sile u odnosu na tuproizvoljno izabranu tačku.
Intenzitet vektora momenta sile za tačku iznosi hFABFM FA ⋅=θ⋅⋅= sinrr
Rastojanjeh, koje leži u ravniπkoju obrazuju napadna linijasile i momentna tačka, predstavlja najkraće rastojanjeizmeđu napadne linije sile i momentne tačke, i naziva se krakom sile za tačku A.
Ovde je tačkaA momentna tačka a tačka B napadna tačka sile
Fr

MOMENT SILE ZA OSU
Moment sile za osu je skalarna veličina koja predstavlja meruobrtnog dejstva sile za tu osu. Može se dobiti projektovanjem na osu vektora momenta sile za proizvoljnu tačku na toj osi.
Ovde, moment sile za x osu određuje
ma koji od narednih skalarnih proizvoda:Fr
...=⋅=⋅=⋅= iMiMiMM FC
FB
FA
Fx
rrrrrr rrrr
Sile koje su paralelne sa osom i silečije napadne linije presecaju osu nemajuobrtno dejstvo oko te ose, tj. momenti takvih sila za osu jednaki su nuli
⇒)1
⇒)2
( ) 0=⋅×=⋅= iFDBiMM FD
Fx
rrrr rr
( ) 0=⋅×=⋅= iPCAiMM PC
Px
rrrr rr
( ) 00 =⋅=⋅×=⋅= iiFCBiMM FC
Fx
rrrrrr rr
( ) 00 =⋅=⋅×=⋅= iiPDAiMM PD
Px
rrrrrr rr

Slučaj kada sila leži u ravni upravnoj na osuP
PAF
FA hPMhFM ⋅=⋅=
rr rr,
PPA
Px
FFA
Fx
hPiMM
hFiMM
⋅−=⋅=
⋅+=⋅=rr
rr
rr
rr
Praktično se mement sile za osu, kada sila leži u ravni upravnoj naosu, određuje prikazom te ravniu pravoj veličini tako što se posmatra sa strane u koju je usmerena osa
U takvom pogledu osa se vidi kao tačka a sila, njena napadna linija i najkraćerastojanje između napadne linije sile i ose vide se u pravoj veličini. Predznakmomenta za osu je “+” ako, tako gledano, sila teži da obrneoko ose u pozitivnom matematičkom smeru (suprotno od smera kazaljke na satu), dok je predznak “-” ako sila teži da obrne oko ose u smeru kazaljke na satu. Sama vrednost koja sledi iza predznaka jednaka je proizvodu intenziteta sile i krakasile. Krak sile predstavlja najkraće rastojanje između napadne linije sile i ose.

Slučaj kada sila zauzima proizvoljan položaj u odnosu na osu
xFx
Fx
Fx MMM
rrr
+= π
hFMM Fx
Fx ⋅== π
πrr
Moment proizvoljne sile određene svojim projekcijama X, Yi Z i koordinatamax, y i znjenenapadne tačke:
Fr
==×=ZYX
zyx
kji
FrM FO
rrr
rrr r ( ) +− izYyZr
( ) ( )kyXxYjxZzXrr
−+−+
zYyZM Fx −=r
xZzXM Fy −=r
yXxYM Fz −=r

O TERMINU MOMENT SILE ZA TA ČKU KOD RAVANSKIH PROBLEMA
Termin “moment sile za tačku” koji se koristi kod ravanskih problemaekvivalentan je terminu “moment sile za osu” koja prolazi kroz momentnutačku a upravna je na ravan i usmerena ka posmatraču.
Dakle, moment sile za neku tačku kod ravanskih problema jednak je proizvoduintenziteta sile i kraka sile za posmatranu tačku, s tim što je predznak “+” akosila teži da obrne telo oko momentne tačke u suprotnom smeru od kazaljke nasatu dok je predznak “-” ako sila teži da obrne telo oko momentne tačke u smerukazaljke na satu.
To znači da se moment sile za tačku kod ravanskih problema tretira kaoskalarna veličina koja predstavlja meru obrtnog dejstva sile oko momentnetačke. Krak sile predstavlja najkraće rastojanje između napadne linije sile i momentne tačke.
0,, =⋅−=⋅+= QAP
PAF
FA MhPMhFM
rrr
Na slici, kraci sila i za tačku Asu označeni sa hF i hP, dok je, očigledno, krak sile , čija napadna tačka prolazi kroz tačku A, jednak nuli.
Fr
Pr
Qr

Primer 5.1Odrediti momente svih sila za prikazane tačke A, B i K ?
2,sin
lGMlSM G
ASA ⋅−=α⋅=
rr
2,
lGMlYM G
BAYB
A ⋅=⋅−=rr
2,tan
lGMlXM G
KAXK
A ⋅−=α⋅=rr
0====== SK
YK
SB
XB
YA
XA MMMMMM AAAA
rrrrrr

Primer 5.2
Odrediti momente svih sila za tačke A i K ?
( ) α⋅−=β+α⋅= cos2
,sinl
GMlSM GA
SA
rr
α⋅−=⋅= cos2
,l
GMAKXM GKA
XK
A
rr ( )( )
( )β
β+α=β−β+α=
cos
sin
90sin
sin0
llAK
β+α=+= tansin EBlEKAEAK
βα+α=⇒ tancossin llAK
Preostali traženi momenti jednaki su nuli, zbog prolaska napadnih linija sila krozmomentne tačke, dakle:
0==== SK
YK
YA
XA MMMM AAA
rrrr

IZRAŽAVANJE SPREGA PREKO MOMENTA SILE ZA TA ČKU
111
FAMFABrrrr
=×=M
111
FBMFBA ′=′×=rrrr
M
222
FCMFCDrrrr
=×=M
222
FDMFDC ′=′×=rrrr
M
Vektor sprega se može odrediti preko vektora momenta sile za tačku
Spreg se kod ravanskih problema može izraziti preko momenta sile za tačku
1111
FB
FA MMhF ′==⋅=
rr
M
2222
FD
FC MMhF ′==⋅=
rr
M
Jedini uslov koji moraju da zadovolje tačke A, B, C i D je da se nalaze na proizvoljnim mestima napadnih linija sila:
I ovde, jedini uslov koji moraju da zadovolje tačke A, B, C i Dje da se nalaze na proizvoljnim mestima napadnih linija sila:
,1F ′r
,1Fr
,2F ′r
.2Fr
,1F ′r
,1Fr
,2F ′r
.2Fr
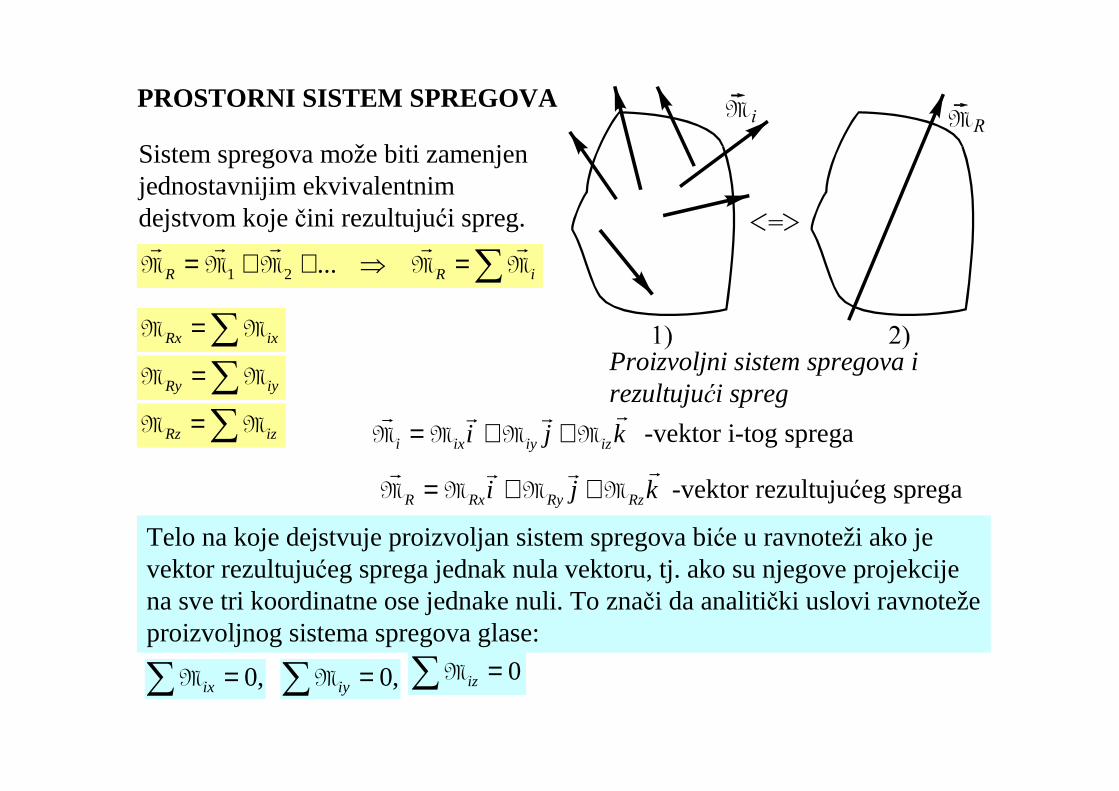
PROSTORNI SISTEM SPREGOVA
Sistem spregova može biti zamenjen jednostavnijim ekvivalentnim dejstvom koje čini rezultujući spreg.
∑=⇒++= iRR MMMMMrrrrr
...21
Proizvoljni sistem spregova i rezultujući spreg
kji iziyixi
rrrrMMMM ++=
kji RzRyRxR
rrrrMMMM ++=
∑= ixRx MM
-vektor rezultujućeg sprega
∑= iyRy MM
∑= izRz MM
Telo na koje dejstvuje proizvoljan sistem spregova biće u ravnoteži ako je vektor rezultujućeg sprega jednak nula vektoru, tj. ako su njegove projekcije na sve tri koordinatne ose jednake nuli. To znači da analitički uslovi ravnoteže proizvoljnog sistema spregova glase:
-vektor i-tog sprega
,0=∑ ixM ,0=∑ iyM ∑ = 0izM

Primer 5.3 Odrediti vektor rezultujućeg sprega koji zamenjuje sledeći sistem zadatih spregova: kji
rrrr3121 +−=M kji
rrrr1322 ++−=M
kjirrrr
2233 −−=M kjrrr
224 −=M,
, ,
30322 =++−==∑ ixRx MM
02213 =−−+==∑ izRz MM
22231 =+−+−==∑ iyRy MM
jiR
rrr23 +=⇒ M
1323 22
222
=+=
=++=⇒ RzRyRxR MMMM
Primer 5.4
Za zadat sistem spregova odrediti rezultujući spreg.Podaci su: M1=1kNm, M2=2 kNm,M3=2 kNm, M4=1kNm, M5=2 kNm,α=450, β=600.
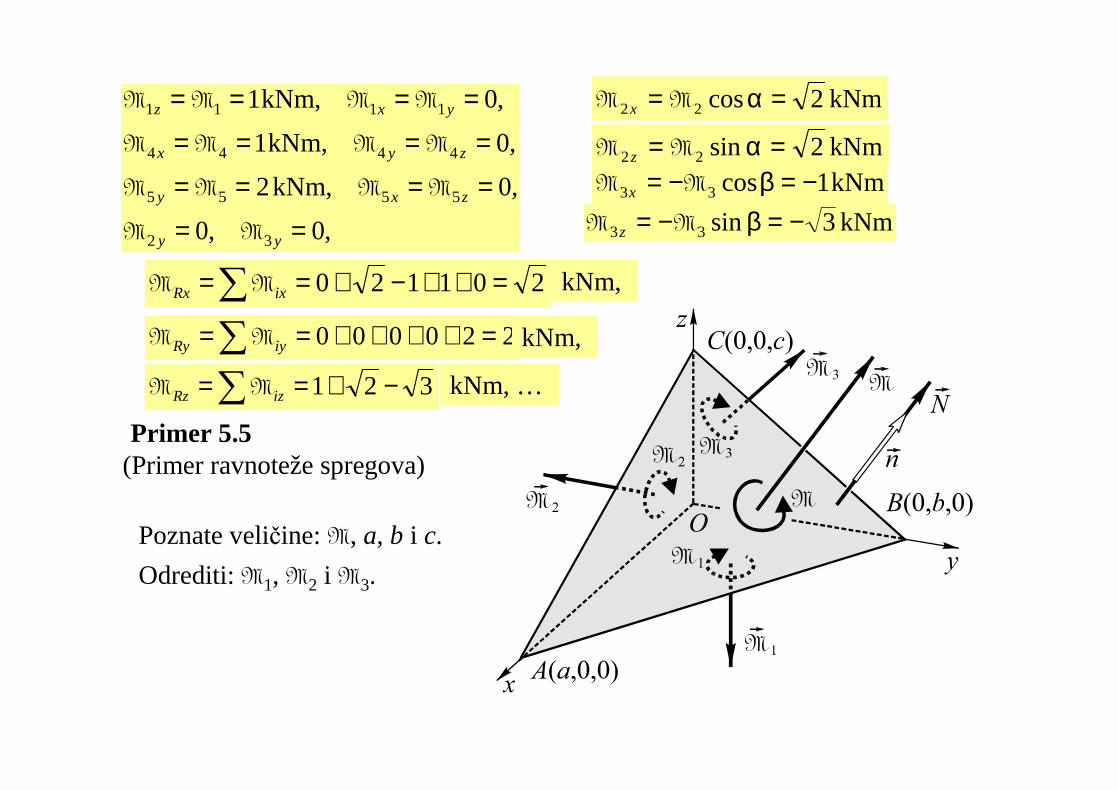
kNm2cos22 =α= MM x
kNm2sin22 =α= MM z
kNm1cos33 −=β−= MM x
kNm3sin33 −=β−= MM z,0,0
,0kNm,2
,0kNm,1
,0kNm,1
32
5555
4444
1111
==
====
====
====
yy
zxy
zyx
yxz
MM
MMMM
MMMM
MMMM
201120 =++−+==∑ ixRx MM
220000 =++++==∑ iyRy MM
321 −+==∑ izRz MM
kNm,
kNm,
kNm, …
Primer 5.5
Poznate veličine: M, a, b i c.
Odrediti:M1, M2 i M3.
(Primer ravnoteže spregova)

Uvodimo jedinični vektor , normalan na ravanABCnr n
rrMM =
kabjacibc
ca
ba
kji
ACABNrrr
rrr
r++=
−−=×=
0
0 ( ) ( ) ( )222 abacbcN ++=⇒r
⇒( ) ( ) ( )222 abacbc
kabjacibc
N
Nn
++
++==rrr
r
rr
⇒( )
( ) ( ) ( )222 abacbc
kabjacibcn
++
++==rrr
rr MMM
kji zyx
rrrrMMMM ++=
( ) ( ) ( )MM
222 abacbc
bcx
++=
( ) ( ) ( )MM
222 abacbc
acy
++=
( ) ( ) ( )MM
222 abacbc
abz
++=
,
.
03 =+−=∑ xix MMM
Uslovi ravnoteže:
02 =+−=∑ yiy MMM
...............
01 =+−=∑ ziz MMM
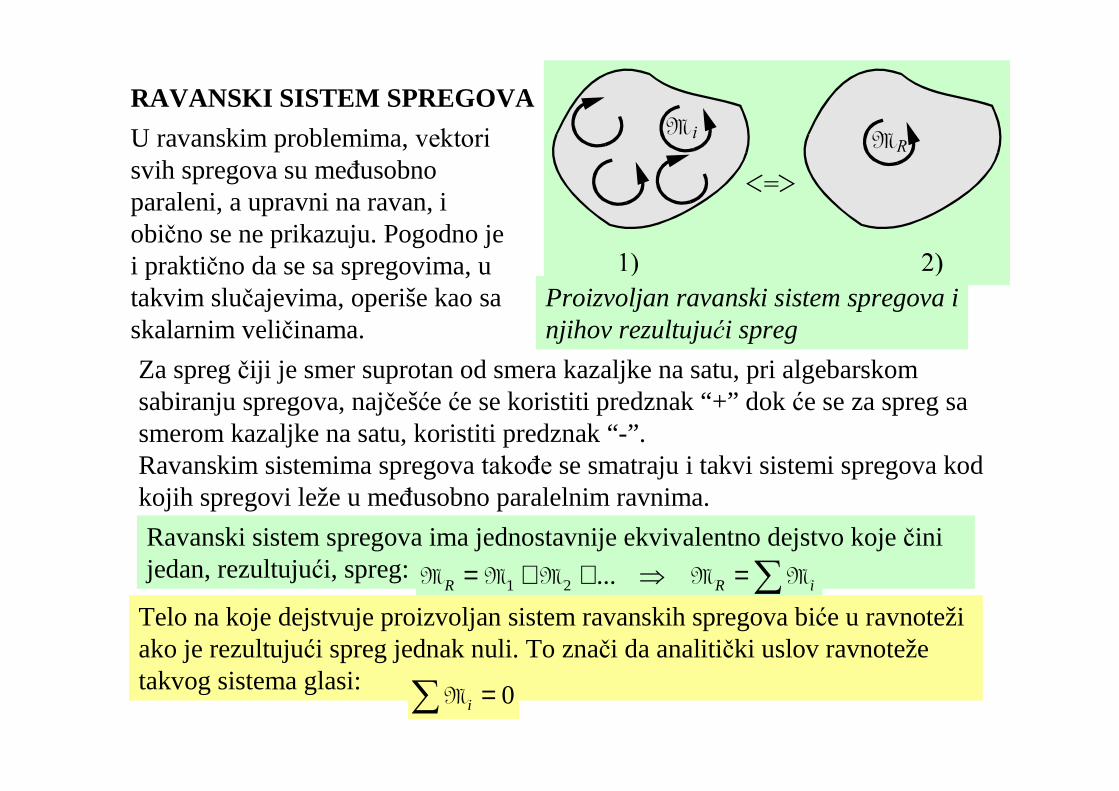
RAVANSKI SISTEM SPREGOVA
Proizvoljan ravanski sistem spregova i njihov rezultujući spreg
U ravanskim problemima, vektori
svih spregova su međusobno paraleni, a upravni na ravan, i obično se ne prikazuju. Pogodno je i praktično da se sa spregovima, u takvim slučajevima, operiše kao sa skalarnim veličinama.
Za spreg čiji je smer suprotan od smera kazaljke na satu, pri algebarskom sabiranju spregova, najčešće će se koristiti predznak “+” dok će se za spreg sa smerom kazaljke na satu, koristiti predznak “-”.Ravanskim sistemima spregova takođe se smatraju i takvi sistemi spregova kod kojih spregovi leže u međusobno paralelnim ravnima.
Ravanski sistem spregova ima jednostavnije ekvivalentno dejstvo koje čini jedan, rezultujući, spreg: ∑=⇒++= iRR MMMMM ...21
Telo na koje dejstvuje proizvoljan sistem ravanskih spregova biće u ravnoteži ako je rezultujući spreg jednak nuli. To znači da analitički uslov ravnoteže takvog sistema glasi: 0=∑ iM
Odrediti ?
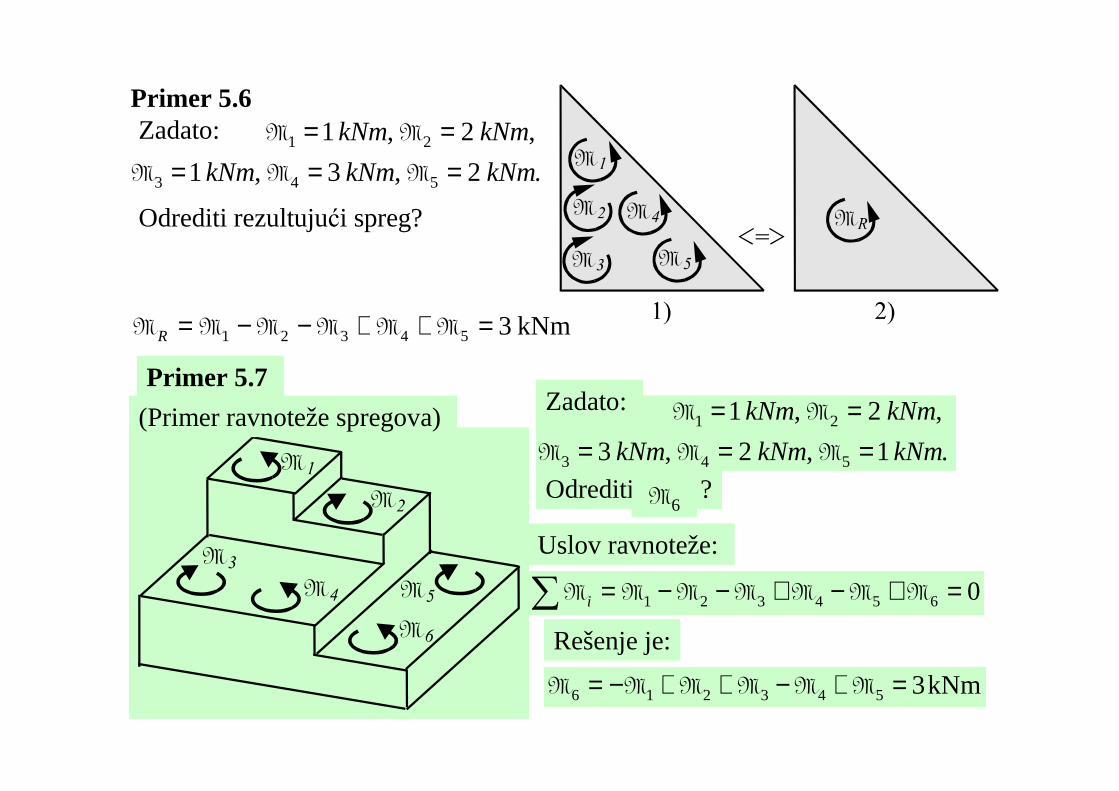
Primer 5.6
.2,3,1
,2,1
543
21
kNmkNmkNm
kNmkNm
=====
MMM
MMZadato:
Odrediti rezultujući spreg?
kNm354321 =++−−= MMMMMM R
Primer 5.7
M6
.1,2,3
,2,1
543
21
kNmkNmkNm
kNmkNm
=====
MMM
MMZadato: (Primer ravnoteže spregova)
Uslov ravnoteže:
0654321 =+−+−−=∑ MMMMMMMi
Rešenje je:
kNm3543216 =+−++−= MMMMMM
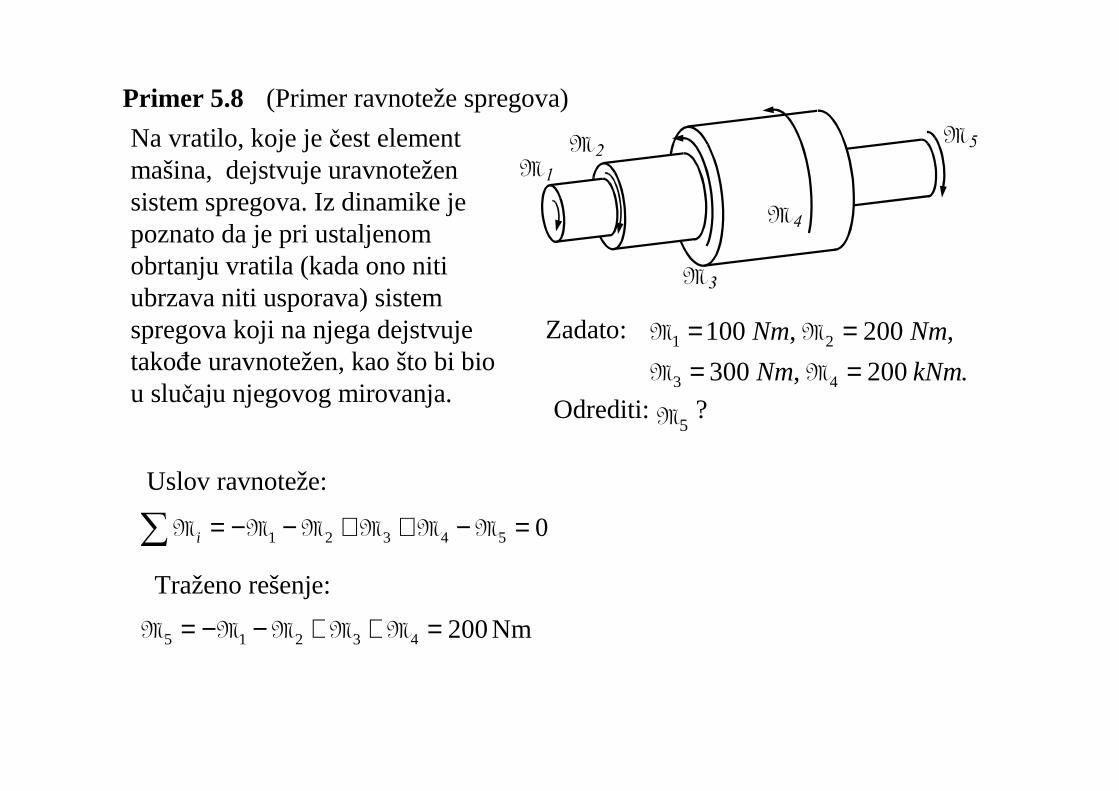
Primer 5.8
Na vratilo, koje je čest element mašina, dejstvuje uravnotežen sistem spregova. Iz dinamike je poznato da je pri ustaljenom obrtanju vratila (kada ono niti ubrzava niti usporava) sistem spregova koji na njega dejstvuje takođe uravnotežen, kao što bi bio u slučaju njegovog mirovanja.
.200,300
,200,100
43
21
kNmNm
NmNm
====
MM
MMZadato:
Odrediti: ?M5
(Primer ravnoteže spregova)
Uslov ravnoteže:
054321 =−++−−=∑ MMMMMMi
Traženo rešenje:
Nm20043215 =++−−= MMMMM

MOMENT SPREGA ZA OSU
Pod pojmom “moment sprega za neku osu” podrazumevaće se mera obrtnogdejstva sprega u odnosu na tu osu.
Moment sprega za neku osu jednak je projekciji vektora tog sprega na tu osu.
Dakle, za spregčiji je vektor kji zyx
rrrrMMMM ++= veličine
istovremeno predstavljaju, kako njegove projekcije na koordinatne ose, tako i momente tog sprega za iste ose.
zyx M MM i,
Primer 5.9
.45,2
,2,10
3
21
=α=
==
kNm
kNmkNm
M
MMPodaci su:
Odrediti momente spregovaza koordinatne ose?
kNm2sin33 −=α−= MM y
.................
kNm2cos33 −=α−= MM z
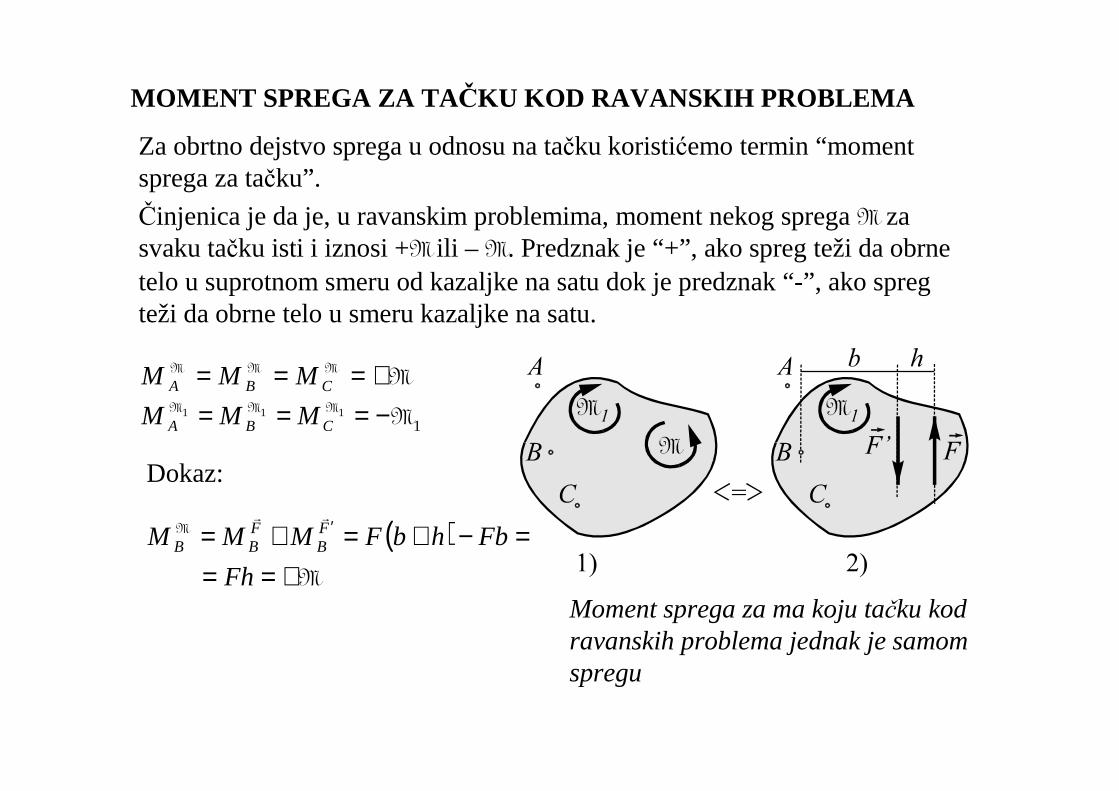
MOMENT SPREGA ZA TA ČKU KOD RAVANSKIH PROBLEMA
Za obrtno dejstvo sprega u odnosu na tačku koristićemo termin “moment sprega za tačku”.
Činjenica je da je, u ravanskim problemima, moment nekog sprega M za svaku tačku isti i iznosi +M ili – M. Predznak je “+”, ako spreg teži da obrnetelo u suprotnom smeru od kazaljke na satu dok je predznak “-”, ako spregteži da obrne telo u smeru kazaljke na satu.
Moment sprega za ma koju tačku kod ravanskih problema jednak je samom spregu
MMMM +=== CBA MMM
1111 M
MMM −=== CBA MMM
Dokaz:
( )M
M
+===−+=+= ′
Fh
FbhbFMMM FB
FBB
rr
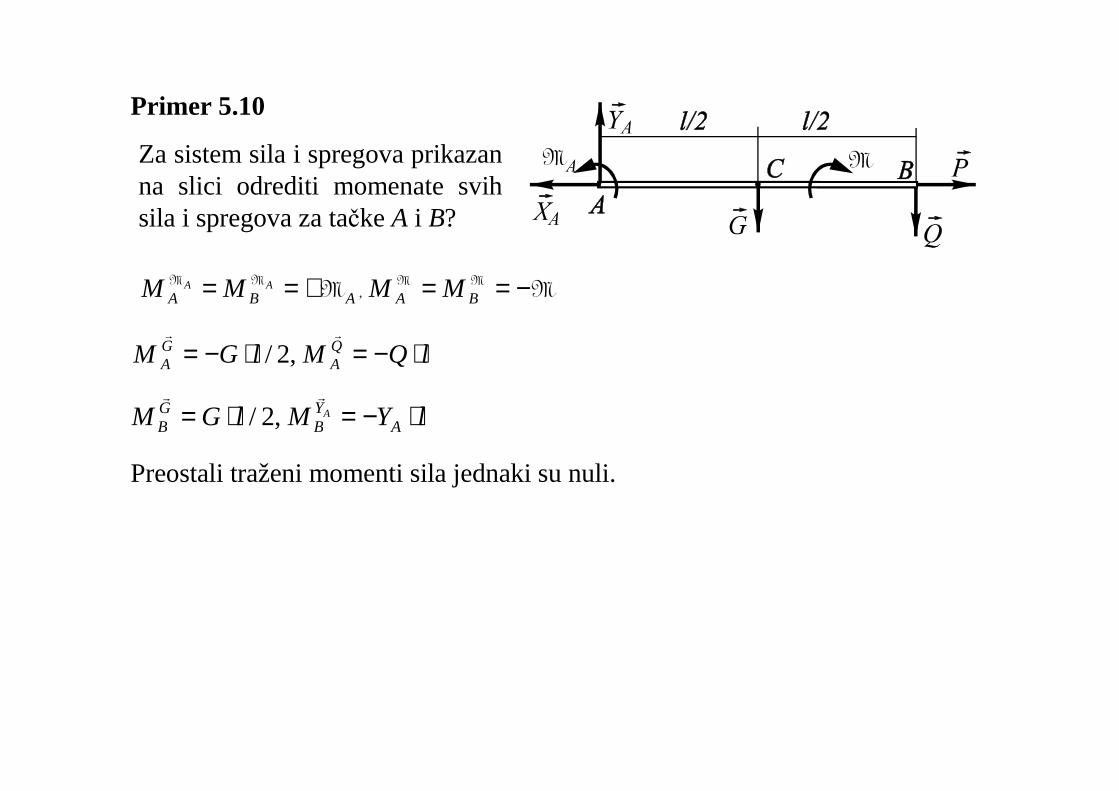
Primer 5.10
Za sistem sila i spregova prikazan na slici odrediti momenate svih sila i spregova za tačke A i B?
M,MMMMM −==+== BAABA MMMM AA
lQMlGM QA
GA ⋅−=⋅−=
rr
,2/
lYMlGM AYB
GB
A ⋅−=⋅=rr
,2/
Preostali traženi momenti sila jednaki su nuli.