Mehanika Kinematika Dinamika W F cos Tagicz/PredNU4slike.pdfMehanika Kinematika Dinamika Rad je nula...
14
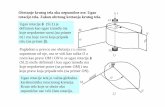
Rad Mehanika Kinematika Dinamika Rad, W, konstantne sile na tijelo definira se kao produkt komponente sile duž smjera pomaka i iznosa pomaka. x F W ) cos ( (F cos θ) je komponenta sile duž smjera pomaka Δx je pomak x F cos F
Transcript of Mehanika Kinematika Dinamika W F cos Tagicz/PredNU4slike.pdfMehanika Kinematika Dinamika Rad je nula...

Rad
Mehanika Kinematika Dinamika
Rad, W, konstantne sile na tijelo definira se kao produkt
komponente sile duž smjera pomaka i iznosa pomaka.
xFW )cos(
(F cos θ) je komponenta sile duž smjera pomaka
Δx je pomak x
F
cosF

Mehanika Kinematika Dinamika
Rad je nula kad:
• nema pomaka (držimo vjedro)
• sila i pomak su međusobno okomiti, kako
je cos 90° = 0 (ako nosimo vjedro
horizontalno, rad gravitacije je nula)
Skalarna veličina
Ako više sila djeluje na tijelo, ukupan rad je algebarski
zbroj radova svih sila
Jedinica rada je joule (J=N m)
Rad je:
...321 WWWW
F
gmFg
x

Mehanika Kinematika Dinamika
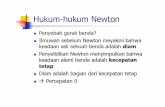
Problem:
=30°
F=55.0 N,
WF=?
WFn=?
Wmg=?
J143mN143)m00.3)(0.30)(cosN0.55()cos( xFWF
J0)m00.3)(0.90)(cos()cos( nnF FxFW
n
J0)m00.3))(0.90(cos()cos( xmgWmg
m00.3x
Nema rada ako je sila
okomita na pomak.
F
nF
gm

Mehanika Kinematika Dinamika
Kinetička energija
.2
1
2
1
2
22
,)(
2
0
22
0
2
2
0
22
0
2
mvmvvv
mW
vvxaxavv
xmaxFW
Neka konstantna sila djeluje u smjeru pomaka. Tada je
te po izrazu za brzinu kod jednoliko ubrzanog gibanja
, gdje je početna brzina, imamo
Ova veličina se zove kinetička energija:2
2
1mvEk
kikfk EEEW
0v

Mehanika Kinematika Dinamika
Potencijalna energija
Gravitacijska potencijalna energija
.
,1cos,
,)cos(cos
fifigrav
fi
grav
mgymgyyymgW
yyy
ymgyFW
Ova veličina se zove potencijalna energija:
mgyU
figrav UUW
mgF
mgF
m
miy
y
fy

Mehanika Kinematika Dinamika
ffkiik
fi
UEUE
EE
Zakon očuvanja energije
Sila je konzervativna ako rad koji ona vrši ne ovisi o putu.
Sila je nekonzervativna ako rad koji ona vrši ovisi o putu.
Primjer. Gravitacijska sila je konzervativna.
Za tijelo koje je pod djelovanjem konzervativne sile ukupna mehanička
energija tijela E je suma kinetičke energije i potencijalne
.UEE k
Ako na tijelo djeluju samo konzervativne sile, ukupna
mehanička energija je konstanta

Mehanika Kinematika Dinamika
Snaga
Snaga je definirana kao omjer izvršenog rada u vremenu
t
WP
Jedinica snage je vat (W)
2
2
s
kgm
s
JW
Motor automobila A ima veću snagu nego motor automobila B.
(1) Motori A i B mogu obaviti isti rad u istom vremenu
(2) U istom vremenu motor B može obaviti veći rad
(3) Motori A i B mogu obaviti isti rad, ali ga motor A obavi brže
Problem:

Mehanika Kinematika Dinamika
Gravitacija
Keplerovi zakoni
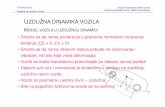
1. Keplerov zakon: Svaki planet se
giba po elipsi u čijem se jednom žarištu
nalazi Sunce (Slika b).
2. Keplerov zakon: Vektor koji ide od
središta Sunca do središta planeta u
jednakim vremenskim intervalima prebriše
iste površine (Slika a).
3. Keplerov zakon: Kvadrati ophodnih
vremena planeta oko Sunca odnose se
kao kubovi velikih poluosi njihovih eliptičkih
putanja
3
2
3
1
2
2
2
1
a
a
T
T
Sunce
Planet
Sunce
b)
a)

Mehanika Kinematika Dinamika
Newtonov zakon gravitacije
122
12
2112 r̂
r
mmGF
12r12r̂ jedinični vektor
)/(kgsm1067.6 2311G gravitacijska
konstanta
12F
21F
N102.4
m1
kg90kg70
kg
mN1067.6 7
22
211
2
21 r
mmGF
Primjer.
Izračunajte gravitacijsko privlačenje između dva studenta udaljena 1m.
12r̂
1m
2m

Gravitacijska potencijalna energija
r
mMGE E
p
gravitacijska potencijalna energija mase m u
gravitacijskom polju Zemlje, gdje je pretpostavljeno
da je potencijalna energija u beskonačnosti nula
mgR
MGm
R
mMGF
E
E
E
E
22
2
E
E
R
MGg
Mehanika Kinematika Dinamika
EE RM , - masa i radijus Zemlje
m

Mehanika Kinematika Dinamika
Osnove relativističke mehanike
S
', xx
y 'y
'zz
O
v
'O
'S
Inercijalni sustavi su sustavi
u kojima vrijede Newtonovi zakoni
u kojima vrijedi Galilejev princip relativnosti
koji se jedan u odnosu na drugog gibaju jednoliko po pravcu ili miruju
Ako je S inercijalni sustav, tada je inercijalni
svaki drugi sustav S’ koji u odnosu na njega
miruje ili se giba jednoliko po pravcu.
Svi inercijalni sustavi su međusobno
ekvivalentni; ne možemo ustanoviti koji sustav
miruje, a koji se jednoliko giba (Galilejev
princip relativnosti).

Mehanika Kinematika Dinamika
Specijalna teorija relativnosti zasniva se na dva postulata:
1. Principu relativnosti koji kaže da u inercijalnim sustavima sve prirodne
pojave teku na isti način
2. Jednakosti brzine svjetlosti u svim inercijalnim sustavima
m/s10997925.2 8c
Iz ovih postulata, kao posljedica, izlaze Lorentzove transformacije
za prijelaz iz sustava S(x,y,z,t) u sustav S’(x’,y’,z’,t’) koji se giba brzinom
v duž x osi
22
2
22 /1
/',',',
/1'
cv
cvxttzzyy
cv
vtxx

Mehanika Kinematika Dinamika
Relativistička dinamika
Zakon očuvanja količine gibanja u skladu je s teorijom relativnosti
ako se količina gibanja definira
Također, kinetička energija se definira
koja je razlika ukupne energije i energije mirovanja
Iz izraza za količinu gibanja i kinetičku energiju dobijamo
22 /1 cv
vmp
2
22
2
/1mc
cv
mcEk
22
2
/1 cv
mcE
2mc
4222 cmcpE

Dodatni materijali
https://phet.colorado.edu/en/simulation/gravity-force-lab
https://phet.colorado.edu/en/simulation/energy-skate-park
https://phet.colorado.edu/en/simulation/gravity-and-orbits