CURS 9: Spatii Vectorialeusers.utcluj.ro/~todeacos/curs9.pdfEXAMEN PARTIAL: 7 Decembrie (Sambata);...
110
CURS 9: Spat ¸ii Vectoriale Conf. dr. Constantin-Cosmin Todea Cluj-Napoca
Transcript of CURS 9: Spatii Vectorialeusers.utcluj.ro/~todeacos/curs9.pdfEXAMEN PARTIAL: 7 Decembrie (Sambata);...
CURS 9: Spatii Vectoriale
Conf. dr. Constantin-Cosmin Todea
Cluj-Napoca
Fie (K ,+, ⋅) corp comutativ (de obicei
K = R sau K = C)
Exemple 9.1
(E1) V3 = {Ð→u ∣Ð→u vector ın spatiu}Ð→u +Ð→v = regula paralelogramuluiαÐ→u = ınmultirea cu scalari, α ∈ R(V3,+) spatiu vectorial peste corpul (R,+, ⋅), notam RV3;
(E2) R3 = {(x , y , z)∣x , y , z ∈ R}(x1, y1, z1) + (x2, y2, z2) = (x1 + x2, y1 + y2, z1 + z2)a ⋅ (x , y , z) def= (ax , ay , az) a ∈ R(R3,+) este spatiu vectorial, notam RR3;
(E2’) Kn = {(x1, ..., xn)∣xi ∈ K , i = 1,n} (Kn,+) grup comutativ:
(x1, ..., xn) + (y1, ..., yn) = (x1 + y1, ..., xn + yn);
a ⋅ (x1, ..., xn) = (ax1, ..., axn) ∀a ∈ K
⇒ KKn spatiu vectorial peste K;
Fie (K ,+, ⋅) corp comutativ (de obicei K = R sau K = C)
Exemple 9.1
(E1) V3 = {Ð→u ∣Ð→u vector ın spatiu}Ð→u +Ð→v = regula paralelogramuluiαÐ→u = ınmultirea cu scalari, α ∈ R(V3,+) spatiu vectorial peste corpul (R,+, ⋅), notam RV3;
(E2) R3 = {(x , y , z)∣x , y , z ∈ R}(x1, y1, z1) + (x2, y2, z2) = (x1 + x2, y1 + y2, z1 + z2)a ⋅ (x , y , z) def= (ax , ay , az) a ∈ R(R3,+) este spatiu vectorial, notam RR3;
(E2’) Kn = {(x1, ..., xn)∣xi ∈ K , i = 1,n} (Kn,+) grup comutativ:
(x1, ..., xn) + (y1, ..., yn) = (x1 + y1, ..., xn + yn);
a ⋅ (x1, ..., xn) = (ax1, ..., axn) ∀a ∈ K
⇒ KKn spatiu vectorial peste K;
Fie (K ,+, ⋅) corp comutativ (de obicei K = R sau K = C)
Exemple 9.1
(E1) V3 = {Ð→u ∣Ð→u vector ın spatiu}Ð→u +Ð→v = regula paralelogramuluiαÐ→u = ınmultirea cu scalari, α ∈ R(V3,+) spatiu vectorial peste corpul (R,+, ⋅), notam RV3;
(E2) R3 = {(x , y , z)∣x , y , z ∈ R}(x1, y1, z1) + (x2, y2, z2) = (x1 + x2, y1 + y2, z1 + z2)a ⋅ (x , y , z) def= (ax , ay , az) a ∈ R(R3,+) este spatiu vectorial, notam RR3;
(E2’) Kn = {(x1, ..., xn)∣xi ∈ K , i = 1,n} (Kn,+) grup comutativ:
(x1, ..., xn) + (y1, ..., yn) = (x1 + y1, ..., xn + yn);
a ⋅ (x1, ..., xn) = (ax1, ..., axn) ∀a ∈ K
⇒ KKn spatiu vectorial peste K;
Fie (K ,+, ⋅) corp comutativ (de obicei K = R sau K = C)
Exemple 9.1
(E1) V3 = {Ð→u ∣Ð→u vector ın spatiu}
Ð→u +Ð→v = regula paralelogramuluiαÐ→u = ınmultirea cu scalari, α ∈ R(V3,+) spatiu vectorial peste corpul (R,+, ⋅), notam RV3;
(E2) R3 = {(x , y , z)∣x , y , z ∈ R}(x1, y1, z1) + (x2, y2, z2) = (x1 + x2, y1 + y2, z1 + z2)a ⋅ (x , y , z) def= (ax , ay , az) a ∈ R(R3,+) este spatiu vectorial, notam RR3;
(E2’) Kn = {(x1, ..., xn)∣xi ∈ K , i = 1,n} (Kn,+) grup comutativ:
(x1, ..., xn) + (y1, ..., yn) = (x1 + y1, ..., xn + yn);
a ⋅ (x1, ..., xn) = (ax1, ..., axn) ∀a ∈ K
⇒ KKn spatiu vectorial peste K;
Fie (K ,+, ⋅) corp comutativ (de obicei K = R sau K = C)
Exemple 9.1
(E1) V3 = {Ð→u ∣Ð→u vector ın spatiu}Ð→u +Ð→v = regula paralelogramului
αÐ→u = ınmultirea cu scalari, α ∈ R(V3,+) spatiu vectorial peste corpul (R,+, ⋅), notam RV3;
(E2) R3 = {(x , y , z)∣x , y , z ∈ R}(x1, y1, z1) + (x2, y2, z2) = (x1 + x2, y1 + y2, z1 + z2)a ⋅ (x , y , z) def= (ax , ay , az) a ∈ R(R3,+) este spatiu vectorial, notam RR3;
(E2’) Kn = {(x1, ..., xn)∣xi ∈ K , i = 1,n} (Kn,+) grup comutativ:
(x1, ..., xn) + (y1, ..., yn) = (x1 + y1, ..., xn + yn);
a ⋅ (x1, ..., xn) = (ax1, ..., axn) ∀a ∈ K
⇒ KKn spatiu vectorial peste K;
Fie (K ,+, ⋅) corp comutativ (de obicei K = R sau K = C)
Exemple 9.1
(E1) V3 = {Ð→u ∣Ð→u vector ın spatiu}Ð→u +Ð→v = regula paralelogramuluiαÐ→u = ınmultirea cu scalari, α ∈ R
(V3,+) spatiu vectorial peste corpul (R,+, ⋅), notam RV3;
(E2) R3 = {(x , y , z)∣x , y , z ∈ R}(x1, y1, z1) + (x2, y2, z2) = (x1 + x2, y1 + y2, z1 + z2)a ⋅ (x , y , z) def= (ax , ay , az) a ∈ R(R3,+) este spatiu vectorial, notam RR3;
(E2’) Kn = {(x1, ..., xn)∣xi ∈ K , i = 1,n} (Kn,+) grup comutativ:
(x1, ..., xn) + (y1, ..., yn) = (x1 + y1, ..., xn + yn);
a ⋅ (x1, ..., xn) = (ax1, ..., axn) ∀a ∈ K
⇒ KKn spatiu vectorial peste K;
Fie (K ,+, ⋅) corp comutativ (de obicei K = R sau K = C)
Exemple 9.1
(E1) V3 = {Ð→u ∣Ð→u vector ın spatiu}Ð→u +Ð→v = regula paralelogramuluiαÐ→u = ınmultirea cu scalari, α ∈ R(V3,+) spatiu vectorial peste corpul (R,+, ⋅),
notam RV3;
(E2) R3 = {(x , y , z)∣x , y , z ∈ R}(x1, y1, z1) + (x2, y2, z2) = (x1 + x2, y1 + y2, z1 + z2)a ⋅ (x , y , z) def= (ax , ay , az) a ∈ R(R3,+) este spatiu vectorial, notam RR3;
(E2’) Kn = {(x1, ..., xn)∣xi ∈ K , i = 1,n} (Kn,+) grup comutativ:
(x1, ..., xn) + (y1, ..., yn) = (x1 + y1, ..., xn + yn);
a ⋅ (x1, ..., xn) = (ax1, ..., axn) ∀a ∈ K
⇒ KKn spatiu vectorial peste K;
Fie (K ,+, ⋅) corp comutativ (de obicei K = R sau K = C)
Exemple 9.1
(E1) V3 = {Ð→u ∣Ð→u vector ın spatiu}Ð→u +Ð→v = regula paralelogramuluiαÐ→u = ınmultirea cu scalari, α ∈ R(V3,+) spatiu vectorial peste corpul (R,+, ⋅), notam RV3;
(E2) R3 = {(x , y , z)∣x , y , z ∈ R}(x1, y1, z1) + (x2, y2, z2) = (x1 + x2, y1 + y2, z1 + z2)a ⋅ (x , y , z) def= (ax , ay , az) a ∈ R(R3,+) este spatiu vectorial, notam RR3;
(E2’) Kn = {(x1, ..., xn)∣xi ∈ K , i = 1,n} (Kn,+) grup comutativ:
(x1, ..., xn) + (y1, ..., yn) = (x1 + y1, ..., xn + yn);
a ⋅ (x1, ..., xn) = (ax1, ..., axn) ∀a ∈ K
⇒ KKn spatiu vectorial peste K;
Fie (K ,+, ⋅) corp comutativ (de obicei K = R sau K = C)
Exemple 9.1
(E1) V3 = {Ð→u ∣Ð→u vector ın spatiu}Ð→u +Ð→v = regula paralelogramuluiαÐ→u = ınmultirea cu scalari, α ∈ R(V3,+) spatiu vectorial peste corpul (R,+, ⋅), notam RV3;
(E2) R3 = {(x , y , z)∣x , y , z ∈ R}
(x1, y1, z1) + (x2, y2, z2) = (x1 + x2, y1 + y2, z1 + z2)a ⋅ (x , y , z) def= (ax , ay , az) a ∈ R(R3,+) este spatiu vectorial, notam RR3;
(E2’) Kn = {(x1, ..., xn)∣xi ∈ K , i = 1,n} (Kn,+) grup comutativ:
(x1, ..., xn) + (y1, ..., yn) = (x1 + y1, ..., xn + yn);
a ⋅ (x1, ..., xn) = (ax1, ..., axn) ∀a ∈ K
⇒ KKn spatiu vectorial peste K;
Fie (K ,+, ⋅) corp comutativ (de obicei K = R sau K = C)
Exemple 9.1
(E1) V3 = {Ð→u ∣Ð→u vector ın spatiu}Ð→u +Ð→v = regula paralelogramuluiαÐ→u = ınmultirea cu scalari, α ∈ R(V3,+) spatiu vectorial peste corpul (R,+, ⋅), notam RV3;
(E2) R3 = {(x , y , z)∣x , y , z ∈ R}(x1, y1, z1) + (x2, y2, z2) = (x1 + x2, y1 + y2, z1 + z2)
a ⋅ (x , y , z) def= (ax , ay , az) a ∈ R(R3,+) este spatiu vectorial, notam RR3;
(E2’) Kn = {(x1, ..., xn)∣xi ∈ K , i = 1,n} (Kn,+) grup comutativ:
(x1, ..., xn) + (y1, ..., yn) = (x1 + y1, ..., xn + yn);
a ⋅ (x1, ..., xn) = (ax1, ..., axn) ∀a ∈ K
⇒ KKn spatiu vectorial peste K;
Fie (K ,+, ⋅) corp comutativ (de obicei K = R sau K = C)
Exemple 9.1
(E1) V3 = {Ð→u ∣Ð→u vector ın spatiu}Ð→u +Ð→v = regula paralelogramuluiαÐ→u = ınmultirea cu scalari, α ∈ R(V3,+) spatiu vectorial peste corpul (R,+, ⋅), notam RV3;
(E2) R3 = {(x , y , z)∣x , y , z ∈ R}(x1, y1, z1) + (x2, y2, z2) = (x1 + x2, y1 + y2, z1 + z2)a ⋅ (x , y , z) def= (ax , ay , az) a ∈ R
(R3,+) este spatiu vectorial, notam RR3;
(E2’) Kn = {(x1, ..., xn)∣xi ∈ K , i = 1,n} (Kn,+) grup comutativ:
(x1, ..., xn) + (y1, ..., yn) = (x1 + y1, ..., xn + yn);
a ⋅ (x1, ..., xn) = (ax1, ..., axn) ∀a ∈ K
⇒ KKn spatiu vectorial peste K;
Fie (K ,+, ⋅) corp comutativ (de obicei K = R sau K = C)
Exemple 9.1
(E1) V3 = {Ð→u ∣Ð→u vector ın spatiu}Ð→u +Ð→v = regula paralelogramuluiαÐ→u = ınmultirea cu scalari, α ∈ R(V3,+) spatiu vectorial peste corpul (R,+, ⋅), notam RV3;
(E2) R3 = {(x , y , z)∣x , y , z ∈ R}(x1, y1, z1) + (x2, y2, z2) = (x1 + x2, y1 + y2, z1 + z2)a ⋅ (x , y , z) def= (ax , ay , az) a ∈ R(R3,+) este spatiu vectorial,
notam RR3;
(E2’) Kn = {(x1, ..., xn)∣xi ∈ K , i = 1,n} (Kn,+) grup comutativ:
(x1, ..., xn) + (y1, ..., yn) = (x1 + y1, ..., xn + yn);
a ⋅ (x1, ..., xn) = (ax1, ..., axn) ∀a ∈ K
⇒ KKn spatiu vectorial peste K;
Fie (K ,+, ⋅) corp comutativ (de obicei K = R sau K = C)
Exemple 9.1
(E1) V3 = {Ð→u ∣Ð→u vector ın spatiu}Ð→u +Ð→v = regula paralelogramuluiαÐ→u = ınmultirea cu scalari, α ∈ R(V3,+) spatiu vectorial peste corpul (R,+, ⋅), notam RV3;
(E2) R3 = {(x , y , z)∣x , y , z ∈ R}(x1, y1, z1) + (x2, y2, z2) = (x1 + x2, y1 + y2, z1 + z2)a ⋅ (x , y , z) def= (ax , ay , az) a ∈ R(R3,+) este spatiu vectorial, notam
RR3;
(E2’) Kn = {(x1, ..., xn)∣xi ∈ K , i = 1,n} (Kn,+) grup comutativ:
(x1, ..., xn) + (y1, ..., yn) = (x1 + y1, ..., xn + yn);
a ⋅ (x1, ..., xn) = (ax1, ..., axn) ∀a ∈ K
⇒ KKn spatiu vectorial peste K;
Fie (K ,+, ⋅) corp comutativ (de obicei K = R sau K = C)
Exemple 9.1
(E1) V3 = {Ð→u ∣Ð→u vector ın spatiu}Ð→u +Ð→v = regula paralelogramuluiαÐ→u = ınmultirea cu scalari, α ∈ R(V3,+) spatiu vectorial peste corpul (R,+, ⋅), notam RV3;
(E2) R3 = {(x , y , z)∣x , y , z ∈ R}(x1, y1, z1) + (x2, y2, z2) = (x1 + x2, y1 + y2, z1 + z2)a ⋅ (x , y , z) def= (ax , ay , az) a ∈ R(R3,+) este spatiu vectorial, notam RR3;
(E2’) Kn = {(x1, ..., xn)∣xi ∈ K , i = 1,n} (Kn,+) grup comutativ:
(x1, ..., xn) + (y1, ..., yn) = (x1 + y1, ..., xn + yn);
a ⋅ (x1, ..., xn) = (ax1, ..., axn) ∀a ∈ K
⇒ KKn spatiu vectorial peste K;
Fie (K ,+, ⋅) corp comutativ (de obicei K = R sau K = C)
Exemple 9.1
(E1) V3 = {Ð→u ∣Ð→u vector ın spatiu}Ð→u +Ð→v = regula paralelogramuluiαÐ→u = ınmultirea cu scalari, α ∈ R(V3,+) spatiu vectorial peste corpul (R,+, ⋅), notam RV3;
(E2) R3 = {(x , y , z)∣x , y , z ∈ R}(x1, y1, z1) + (x2, y2, z2) = (x1 + x2, y1 + y2, z1 + z2)a ⋅ (x , y , z) def= (ax , ay , az) a ∈ R(R3,+) este spatiu vectorial, notam RR3;
(E2’) Kn = {(x1, ..., xn)∣xi ∈ K , i = 1,n}
(Kn,+) grup comutativ:
(x1, ..., xn) + (y1, ..., yn) = (x1 + y1, ..., xn + yn);
a ⋅ (x1, ..., xn) = (ax1, ..., axn) ∀a ∈ K
⇒ KKn spatiu vectorial peste K;
Fie (K ,+, ⋅) corp comutativ (de obicei K = R sau K = C)
Exemple 9.1
(E1) V3 = {Ð→u ∣Ð→u vector ın spatiu}Ð→u +Ð→v = regula paralelogramuluiαÐ→u = ınmultirea cu scalari, α ∈ R(V3,+) spatiu vectorial peste corpul (R,+, ⋅), notam RV3;
(E2) R3 = {(x , y , z)∣x , y , z ∈ R}(x1, y1, z1) + (x2, y2, z2) = (x1 + x2, y1 + y2, z1 + z2)a ⋅ (x , y , z) def= (ax , ay , az) a ∈ R(R3,+) este spatiu vectorial, notam RR3;
(E2’) Kn = {(x1, ..., xn)∣xi ∈ K , i = 1,n} (Kn,+) grup comutativ:
(x1, ..., xn) + (y1, ..., yn) = (x1 + y1, ..., xn + yn);
a ⋅ (x1, ..., xn) = (ax1, ..., axn) ∀a ∈ K
⇒ KKn spatiu vectorial peste K;
Fie (K ,+, ⋅) corp comutativ (de obicei K = R sau K = C)
Exemple 9.1
(E1) V3 = {Ð→u ∣Ð→u vector ın spatiu}Ð→u +Ð→v = regula paralelogramuluiαÐ→u = ınmultirea cu scalari, α ∈ R(V3,+) spatiu vectorial peste corpul (R,+, ⋅), notam RV3;
(E2) R3 = {(x , y , z)∣x , y , z ∈ R}(x1, y1, z1) + (x2, y2, z2) = (x1 + x2, y1 + y2, z1 + z2)a ⋅ (x , y , z) def= (ax , ay , az) a ∈ R(R3,+) este spatiu vectorial, notam RR3;
(E2’) Kn = {(x1, ..., xn)∣xi ∈ K , i = 1,n} (Kn,+) grup comutativ:
(x1, ..., xn) + (y1, ..., yn) = (x1 + y1, ..., xn + yn);
a ⋅ (x1, ..., xn) = (ax1, ..., axn) ∀a ∈ K
⇒ KKn spatiu vectorial peste K;
Fie (K ,+, ⋅) corp comutativ (de obicei K = R sau K = C)
Exemple 9.1
(E1) V3 = {Ð→u ∣Ð→u vector ın spatiu}Ð→u +Ð→v = regula paralelogramuluiαÐ→u = ınmultirea cu scalari, α ∈ R(V3,+) spatiu vectorial peste corpul (R,+, ⋅), notam RV3;
(E2) R3 = {(x , y , z)∣x , y , z ∈ R}(x1, y1, z1) + (x2, y2, z2) = (x1 + x2, y1 + y2, z1 + z2)a ⋅ (x , y , z) def= (ax , ay , az) a ∈ R(R3,+) este spatiu vectorial, notam RR3;
(E2’) Kn = {(x1, ..., xn)∣xi ∈ K , i = 1,n} (Kn,+) grup comutativ:
(x1, ..., xn) + (y1, ..., yn) = (x1 + y1, ..., xn + yn);
a ⋅ (x1, ..., xn) = (ax1, ..., axn) ∀a ∈ K
⇒ KKn spatiu vectorial peste K;
Fie (K ,+, ⋅) corp comutativ (de obicei K = R sau K = C)
Exemple 9.1
(E1) V3 = {Ð→u ∣Ð→u vector ın spatiu}Ð→u +Ð→v = regula paralelogramuluiαÐ→u = ınmultirea cu scalari, α ∈ R(V3,+) spatiu vectorial peste corpul (R,+, ⋅), notam RV3;
(E2) R3 = {(x , y , z)∣x , y , z ∈ R}(x1, y1, z1) + (x2, y2, z2) = (x1 + x2, y1 + y2, z1 + z2)a ⋅ (x , y , z) def= (ax , ay , az) a ∈ R(R3,+) este spatiu vectorial, notam RR3;
(E2’) Kn = {(x1, ..., xn)∣xi ∈ K , i = 1,n} (Kn,+) grup comutativ:
(x1, ..., xn) + (y1, ..., yn) = (x1 + y1, ..., xn + yn);
a ⋅ (x1, ..., xn) = (ax1, ..., axn) ∀a ∈ K
⇒ KKn spatiu vectorial peste K;

(E3)
KMm,n(K)
= spatiul vectorial al matricilor de m linii si n coloane;
(E4)
RR[x] ≅ spatiu vectorial al polinoamelor;
R[x] = {f ∣ f = a0+a1x+. . .+an−1xn−1+anxn, ai ∈ R, i = 0,n,n ∈ N}
f ,g ∈ R[x]⇒ f + g = suma a doua polinoamea ∈ R, a ⋅ f = aa0 + aa1x + ... + aanx
n.
(E3)
KMm,n(K) = spatiul vectorial al matricilor de m linii si n coloane;
(E4)
RR[x] ≅ spatiu vectorial al polinoamelor;
R[x] = {f ∣ f = a0+a1x+. . .+an−1xn−1+anxn, ai ∈ R, i = 0,n,n ∈ N}
f ,g ∈ R[x]⇒ f + g = suma a doua polinoamea ∈ R, a ⋅ f = aa0 + aa1x + ... + aanx
n.
(E3)
KMm,n(K) = spatiul vectorial al matricilor de m linii si n coloane;
(E4)
RR[x] ≅ spatiu vectorial al polinoamelor;
R[x] = {f ∣ f = a0+a1x+. . .+an−1xn−1+anxn, ai ∈ R, i = 0,n,n ∈ N}
f ,g ∈ R[x]⇒ f + g = suma a doua polinoamea ∈ R, a ⋅ f = aa0 + aa1x + ... + aanx
n.
(E3)
KMm,n(K) = spatiul vectorial al matricilor de m linii si n coloane;
(E4)
RR[x] ≅ spatiu vectorial al polinoamelor;
R[x] = {f ∣ f = a0+a1x+. . .+an−1xn−1+anxn,
ai ∈ R, i = 0,n,n ∈ N}
f ,g ∈ R[x]⇒ f + g = suma a doua polinoamea ∈ R, a ⋅ f = aa0 + aa1x + ... + aanx
n.

(E3)
KMm,n(K) = spatiul vectorial al matricilor de m linii si n coloane;
(E4)
RR[x] ≅ spatiu vectorial al polinoamelor;
R[x] = {f ∣ f = a0+a1x+. . .+an−1xn−1+anxn, ai ∈ R, i = 0,n,n ∈ N}
f ,g ∈ R[x]⇒ f + g = suma a doua polinoamea ∈ R, a ⋅ f = aa0 + aa1x + ... + aanx
n.
(E3)
KMm,n(K) = spatiul vectorial al matricilor de m linii si n coloane;
(E4)
RR[x] ≅ spatiu vectorial al polinoamelor;
R[x] = {f ∣ f = a0+a1x+. . .+an−1xn−1+anxn, ai ∈ R, i = 0,n,n ∈ N}
f ,g ∈ R[x]⇒ f + g = suma a doua polinoame
a ∈ R, a ⋅ f = aa0 + aa1x + ... + aanxn.
(E3)
KMm,n(K) = spatiul vectorial al matricilor de m linii si n coloane;
(E4)
RR[x] ≅ spatiu vectorial al polinoamelor;
R[x] = {f ∣ f = a0+a1x+. . .+an−1xn−1+anxn, ai ∈ R, i = 0,n,n ∈ N}
f ,g ∈ R[x]⇒ f + g = suma a doua polinoamea ∈ R, a ⋅ f = aa0 + aa1x + ... + aanx
n.
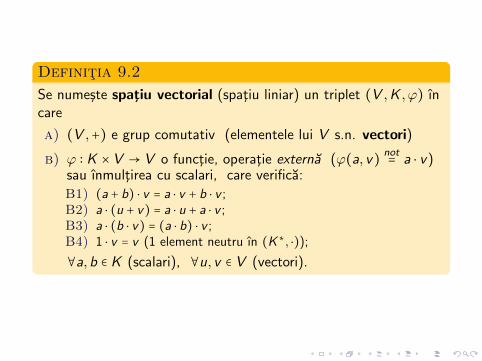
Definitia 9.2
Se numeste
spatiu vectorial (spatiu liniar) un triplet (V ,K , ϕ) ıncare
a) (V ,+) e grup comutativ (elementele lui V s.n. vectori)
b) ϕ ∶ K ×V → V o functie, operatie externa (ϕ(a, v) not= a ⋅ v)sau ınmultirea cu scalari, care verifica:
B1) (a + b) ⋅ v = a ⋅ v + b ⋅ v ;B2) a ⋅ (u + v) = a ⋅ u + a ⋅ v ;B3) a ⋅ (b ⋅ v) = (a ⋅ b) ⋅ v ;B4) 1 ⋅ v = v (1 element neutru ın (K∗, ⋅));
∀a,b ∈ K (scalari), ∀u, v ∈ V (vectori).
Definitia 9.2
Se numeste spatiu vectorial
(spatiu liniar) un triplet (V ,K , ϕ) ıncare
a) (V ,+) e grup comutativ (elementele lui V s.n. vectori)
b) ϕ ∶ K ×V → V o functie, operatie externa (ϕ(a, v) not= a ⋅ v)sau ınmultirea cu scalari, care verifica:
B1) (a + b) ⋅ v = a ⋅ v + b ⋅ v ;B2) a ⋅ (u + v) = a ⋅ u + a ⋅ v ;B3) a ⋅ (b ⋅ v) = (a ⋅ b) ⋅ v ;B4) 1 ⋅ v = v (1 element neutru ın (K∗, ⋅));
∀a,b ∈ K (scalari), ∀u, v ∈ V (vectori).
Definitia 9.2
Se numeste spatiu vectorial (spatiu liniar) un triplet (V ,K , ϕ) ıncare
a) (V ,+) e grup comutativ (elementele lui V s.n. vectori)
b) ϕ ∶ K ×V → V o functie, operatie externa (ϕ(a, v) not= a ⋅ v)sau ınmultirea cu scalari, care verifica:
B1) (a + b) ⋅ v = a ⋅ v + b ⋅ v ;B2) a ⋅ (u + v) = a ⋅ u + a ⋅ v ;B3) a ⋅ (b ⋅ v) = (a ⋅ b) ⋅ v ;B4) 1 ⋅ v = v (1 element neutru ın (K∗, ⋅));
∀a,b ∈ K (scalari), ∀u, v ∈ V (vectori).
Definitia 9.2
Se numeste spatiu vectorial (spatiu liniar) un triplet (V ,K , ϕ) ıncare
a) (V ,+) e grup comutativ
(elementele lui V s.n. vectori)
b) ϕ ∶ K ×V → V o functie, operatie externa (ϕ(a, v) not= a ⋅ v)sau ınmultirea cu scalari, care verifica:
B1) (a + b) ⋅ v = a ⋅ v + b ⋅ v ;B2) a ⋅ (u + v) = a ⋅ u + a ⋅ v ;B3) a ⋅ (b ⋅ v) = (a ⋅ b) ⋅ v ;B4) 1 ⋅ v = v (1 element neutru ın (K∗, ⋅));
∀a,b ∈ K (scalari), ∀u, v ∈ V (vectori).
Definitia 9.2
Se numeste spatiu vectorial (spatiu liniar) un triplet (V ,K , ϕ) ıncare
a) (V ,+) e grup comutativ (elementele lui V
s.n. vectori)
b) ϕ ∶ K ×V → V o functie, operatie externa (ϕ(a, v) not= a ⋅ v)sau ınmultirea cu scalari, care verifica:
B1) (a + b) ⋅ v = a ⋅ v + b ⋅ v ;B2) a ⋅ (u + v) = a ⋅ u + a ⋅ v ;B3) a ⋅ (b ⋅ v) = (a ⋅ b) ⋅ v ;B4) 1 ⋅ v = v (1 element neutru ın (K∗, ⋅));
∀a,b ∈ K (scalari), ∀u, v ∈ V (vectori).
Definitia 9.2
Se numeste spatiu vectorial (spatiu liniar) un triplet (V ,K , ϕ) ıncare
a) (V ,+) e grup comutativ (elementele lui V s.n. vectori)
b) ϕ ∶ K ×V → V o functie, operatie externa (ϕ(a, v) not= a ⋅ v)sau ınmultirea cu scalari, care verifica:
B1) (a + b) ⋅ v = a ⋅ v + b ⋅ v ;B2) a ⋅ (u + v) = a ⋅ u + a ⋅ v ;B3) a ⋅ (b ⋅ v) = (a ⋅ b) ⋅ v ;B4) 1 ⋅ v = v (1 element neutru ın (K∗, ⋅));
∀a,b ∈ K (scalari), ∀u, v ∈ V (vectori).
Definitia 9.2
Se numeste spatiu vectorial (spatiu liniar) un triplet (V ,K , ϕ) ıncare
a) (V ,+) e grup comutativ (elementele lui V s.n. vectori)
b) ϕ ∶ K ×V → V o functie,
operatie externa (ϕ(a, v) not= a ⋅ v)sau ınmultirea cu scalari, care verifica:
B1) (a + b) ⋅ v = a ⋅ v + b ⋅ v ;B2) a ⋅ (u + v) = a ⋅ u + a ⋅ v ;B3) a ⋅ (b ⋅ v) = (a ⋅ b) ⋅ v ;B4) 1 ⋅ v = v (1 element neutru ın (K∗, ⋅));
∀a,b ∈ K (scalari), ∀u, v ∈ V (vectori).
Definitia 9.2
Se numeste spatiu vectorial (spatiu liniar) un triplet (V ,K , ϕ) ıncare
a) (V ,+) e grup comutativ (elementele lui V s.n. vectori)
b) ϕ ∶ K ×V → V o functie, operatie externa
(ϕ(a, v) not= a ⋅ v)sau ınmultirea cu scalari, care verifica:
B1) (a + b) ⋅ v = a ⋅ v + b ⋅ v ;B2) a ⋅ (u + v) = a ⋅ u + a ⋅ v ;B3) a ⋅ (b ⋅ v) = (a ⋅ b) ⋅ v ;B4) 1 ⋅ v = v (1 element neutru ın (K∗, ⋅));
∀a,b ∈ K (scalari), ∀u, v ∈ V (vectori).
Definitia 9.2
Se numeste spatiu vectorial (spatiu liniar) un triplet (V ,K , ϕ) ıncare
a) (V ,+) e grup comutativ (elementele lui V s.n. vectori)
b) ϕ ∶ K ×V → V o functie, operatie externa (ϕ(a, v) not= a ⋅ v)
sau ınmultirea cu scalari, care verifica:
B1) (a + b) ⋅ v = a ⋅ v + b ⋅ v ;B2) a ⋅ (u + v) = a ⋅ u + a ⋅ v ;B3) a ⋅ (b ⋅ v) = (a ⋅ b) ⋅ v ;B4) 1 ⋅ v = v (1 element neutru ın (K∗, ⋅));
∀a,b ∈ K (scalari), ∀u, v ∈ V (vectori).
Definitia 9.2
Se numeste spatiu vectorial (spatiu liniar) un triplet (V ,K , ϕ) ıncare
a) (V ,+) e grup comutativ (elementele lui V s.n. vectori)
b) ϕ ∶ K ×V → V o functie, operatie externa (ϕ(a, v) not= a ⋅ v)sau ınmultirea cu scalari,
care verifica:
B1) (a + b) ⋅ v = a ⋅ v + b ⋅ v ;B2) a ⋅ (u + v) = a ⋅ u + a ⋅ v ;B3) a ⋅ (b ⋅ v) = (a ⋅ b) ⋅ v ;B4) 1 ⋅ v = v (1 element neutru ın (K∗, ⋅));
∀a,b ∈ K (scalari), ∀u, v ∈ V (vectori).
Definitia 9.2
Se numeste spatiu vectorial (spatiu liniar) un triplet (V ,K , ϕ) ıncare
a) (V ,+) e grup comutativ (elementele lui V s.n. vectori)
b) ϕ ∶ K ×V → V o functie, operatie externa (ϕ(a, v) not= a ⋅ v)sau ınmultirea cu scalari, care verifica:
B1) (a + b) ⋅ v = a ⋅ v + b ⋅ v ;B2) a ⋅ (u + v) = a ⋅ u + a ⋅ v ;B3) a ⋅ (b ⋅ v) = (a ⋅ b) ⋅ v ;B4) 1 ⋅ v = v (1 element neutru ın (K∗, ⋅));
∀a,b ∈ K (scalari), ∀u, v ∈ V (vectori).
Definitia 9.2
Se numeste spatiu vectorial (spatiu liniar) un triplet (V ,K , ϕ) ıncare
a) (V ,+) e grup comutativ (elementele lui V s.n. vectori)
b) ϕ ∶ K ×V → V o functie, operatie externa (ϕ(a, v) not= a ⋅ v)sau ınmultirea cu scalari, care verifica:
B1) (a + b) ⋅ v = a ⋅ v + b ⋅ v ;
B2) a ⋅ (u + v) = a ⋅ u + a ⋅ v ;B3) a ⋅ (b ⋅ v) = (a ⋅ b) ⋅ v ;B4) 1 ⋅ v = v (1 element neutru ın (K∗, ⋅));
∀a,b ∈ K (scalari), ∀u, v ∈ V (vectori).
Definitia 9.2
Se numeste spatiu vectorial (spatiu liniar) un triplet (V ,K , ϕ) ıncare
a) (V ,+) e grup comutativ (elementele lui V s.n. vectori)
b) ϕ ∶ K ×V → V o functie, operatie externa (ϕ(a, v) not= a ⋅ v)sau ınmultirea cu scalari, care verifica:
B1) (a + b) ⋅ v = a ⋅ v + b ⋅ v ;B2) a ⋅ (u + v) = a ⋅ u + a ⋅ v ;
B3) a ⋅ (b ⋅ v) = (a ⋅ b) ⋅ v ;B4) 1 ⋅ v = v (1 element neutru ın (K∗, ⋅));
∀a,b ∈ K (scalari), ∀u, v ∈ V (vectori).

Definitia 9.2
Se numeste spatiu vectorial (spatiu liniar) un triplet (V ,K , ϕ) ıncare
a) (V ,+) e grup comutativ (elementele lui V s.n. vectori)
b) ϕ ∶ K ×V → V o functie, operatie externa (ϕ(a, v) not= a ⋅ v)sau ınmultirea cu scalari, care verifica:
B1) (a + b) ⋅ v = a ⋅ v + b ⋅ v ;B2) a ⋅ (u + v) = a ⋅ u + a ⋅ v ;B3) a ⋅ (b ⋅ v) = (a ⋅ b) ⋅ v ;
B4) 1 ⋅ v = v (1 element neutru ın (K∗, ⋅));
∀a,b ∈ K (scalari), ∀u, v ∈ V (vectori).
Definitia 9.2
Se numeste spatiu vectorial (spatiu liniar) un triplet (V ,K , ϕ) ıncare
a) (V ,+) e grup comutativ (elementele lui V s.n. vectori)
b) ϕ ∶ K ×V → V o functie, operatie externa (ϕ(a, v) not= a ⋅ v)sau ınmultirea cu scalari, care verifica:
B1) (a + b) ⋅ v = a ⋅ v + b ⋅ v ;B2) a ⋅ (u + v) = a ⋅ u + a ⋅ v ;B3) a ⋅ (b ⋅ v) = (a ⋅ b) ⋅ v ;B4) 1 ⋅ v = v (1 element neutru ın (K∗, ⋅));
∀a,b ∈ K (scalari), ∀u, v ∈ V (vectori).
Definitia 9.2
Se numeste spatiu vectorial (spatiu liniar) un triplet (V ,K , ϕ) ıncare
a) (V ,+) e grup comutativ (elementele lui V s.n. vectori)
b) ϕ ∶ K ×V → V o functie, operatie externa (ϕ(a, v) not= a ⋅ v)sau ınmultirea cu scalari, care verifica:
B1) (a + b) ⋅ v = a ⋅ v + b ⋅ v ;B2) a ⋅ (u + v) = a ⋅ u + a ⋅ v ;B3) a ⋅ (b ⋅ v) = (a ⋅ b) ⋅ v ;B4) 1 ⋅ v = v (1 element neutru ın (K∗, ⋅));
∀a,b ∈ K (scalari),
∀u, v ∈ V (vectori).
Definitia 9.2
Se numeste spatiu vectorial (spatiu liniar) un triplet (V ,K , ϕ) ıncare
a) (V ,+) e grup comutativ (elementele lui V s.n. vectori)
b) ϕ ∶ K ×V → V o functie, operatie externa (ϕ(a, v) not= a ⋅ v)sau ınmultirea cu scalari, care verifica:
B1) (a + b) ⋅ v = a ⋅ v + b ⋅ v ;B2) a ⋅ (u + v) = a ⋅ u + a ⋅ v ;B3) a ⋅ (b ⋅ v) = (a ⋅ b) ⋅ v ;B4) 1 ⋅ v = v (1 element neutru ın (K∗, ⋅));
∀a,b ∈ K (scalari), ∀u, v ∈ V (vectori).

Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial, spunem ca grupul (V ,+)este spatiu vectorial peste K si notam: KV (cu operatiilesubıntelese);
2) Facem distinctia : elementul neutru ın (K ,+) se noteaza cu0K (sau 0), iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.
Observatie
1) Daca (V ,K , ⋅)
este spatiu vectorial, spunem ca grupul (V ,+)este spatiu vectorial peste K si notam: KV (cu operatiilesubıntelese);
2) Facem distinctia : elementul neutru ın (K ,+) se noteaza cu0K (sau 0), iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.
Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial,
spunem ca grupul (V ,+)este spatiu vectorial peste K si notam: KV (cu operatiilesubıntelese);
2) Facem distinctia : elementul neutru ın (K ,+) se noteaza cu0K (sau 0), iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.
Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial, spunem ca grupul (V ,+)
este spatiu vectorial peste K si notam: KV (cu operatiilesubıntelese);
2) Facem distinctia : elementul neutru ın (K ,+) se noteaza cu0K (sau 0), iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.
Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial, spunem ca grupul (V ,+)este spatiu vectorial peste K si notam:
KV (cu operatiilesubıntelese);
2) Facem distinctia : elementul neutru ın (K ,+) se noteaza cu0K (sau 0), iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.
Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial, spunem ca grupul (V ,+)este spatiu vectorial peste K si notam: KV
(cu operatiilesubıntelese);
2) Facem distinctia : elementul neutru ın (K ,+) se noteaza cu0K (sau 0), iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.
Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial, spunem ca grupul (V ,+)este spatiu vectorial peste K si notam: KV (cu operatiile
subıntelese);
2) Facem distinctia : elementul neutru ın (K ,+) se noteaza cu0K (sau 0), iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.

Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial, spunem ca grupul (V ,+)este spatiu vectorial peste K si notam: KV (cu operatiilesubıntelese);
2) Facem distinctia : elementul neutru ın (K ,+) se noteaza cu0K (sau 0), iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.

Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial, spunem ca grupul (V ,+)este spatiu vectorial peste K si notam: KV (cu operatiilesubıntelese);
2) Facem distinctia :
elementul neutru ın (K ,+) se noteaza cu0K (sau 0), iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.
Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial, spunem ca grupul (V ,+)este spatiu vectorial peste K si notam: KV (cu operatiilesubıntelese);
2) Facem distinctia : elementul neutru ın (K ,+)
se noteaza cu0K (sau 0), iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.
Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial, spunem ca grupul (V ,+)este spatiu vectorial peste K si notam: KV (cu operatiilesubıntelese);
2) Facem distinctia : elementul neutru ın (K ,+) se noteaza cu
0K (sau 0), iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.
Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial, spunem ca grupul (V ,+)este spatiu vectorial peste K si notam: KV (cu operatiilesubıntelese);
2) Facem distinctia : elementul neutru ın (K ,+) se noteaza cu0K (sau 0),
iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.
Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial, spunem ca grupul (V ,+)este spatiu vectorial peste K si notam: KV (cu operatiilesubıntelese);
2) Facem distinctia : elementul neutru ın (K ,+) se noteaza cu0K (sau 0), iar ın (V ,+)
se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.
Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial, spunem ca grupul (V ,+)este spatiu vectorial peste K si notam: KV (cu operatiilesubıntelese);
2) Facem distinctia : elementul neutru ın (K ,+) se noteaza cu0K (sau 0), iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.

Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial, spunem ca grupul (V ,+)este spatiu vectorial peste K si notam: KV (cu operatiilesubıntelese);
2) Facem distinctia : elementul neutru ın (K ,+) se noteaza cu0K (sau 0), iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒
a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.
Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial, spunem ca grupul (V ,+)este spatiu vectorial peste K si notam: KV (cu operatiilesubıntelese);
2) Facem distinctia : elementul neutru ın (K ,+) se noteaza cu0K (sau 0), iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.
Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial, spunem ca grupul (V ,+)este spatiu vectorial peste K si notam: KV (cu operatiilesubıntelese);
2) Facem distinctia : elementul neutru ın (K ,+) se noteaza cu0K (sau 0), iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.
Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial, spunem ca grupul (V ,+)este spatiu vectorial peste K si notam: KV (cu operatiilesubıntelese);
2) Facem distinctia : elementul neutru ın (K ,+) se noteaza cu0K (sau 0), iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ)
un spatiu vectorial si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.
Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial, spunem ca grupul (V ,+)este spatiu vectorial peste K si notam: KV (cu operatiilesubıntelese);
2) Facem distinctia : elementul neutru ın (K ,+) se noteaza cu0K (sau 0), iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial
si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.
Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial, spunem ca grupul (V ,+)este spatiu vectorial peste K si notam: KV (cu operatiilesubıntelese);
2) Facem distinctia : elementul neutru ın (K ,+) se noteaza cu0K (sau 0), iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial si U ⊆ V , U ≠ ∅.
U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.
Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial, spunem ca grupul (V ,+)este spatiu vectorial peste K si notam: KV (cu operatiilesubıntelese);
2) Facem distinctia : elementul neutru ın (K ,+) se noteaza cu0K (sau 0), iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.
Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial, spunem ca grupul (V ,+)este spatiu vectorial peste K si notam: KV (cu operatiilesubıntelese);
2) Facem distinctia : elementul neutru ın (K ,+) se noteaza cu0K (sau 0), iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este
subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.
Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial, spunem ca grupul (V ,+)este spatiu vectorial peste K si notam: KV (cu operatiilesubıntelese);
2) Facem distinctia : elementul neutru ın (K ,+) se noteaza cu0K (sau 0), iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)
(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.
Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial, spunem ca grupul (V ,+)este spatiu vectorial peste K si notam: KV (cu operatiilesubıntelese);
2) Facem distinctia : elementul neutru ın (K ,+) se noteaza cu0K (sau 0), iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.
Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial, spunem ca grupul (V ,+)este spatiu vectorial peste K si notam: KV (cu operatiilesubıntelese);
2) Facem distinctia : elementul neutru ın (K ,+) se noteaza cu0K (sau 0), iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U)
ramane spatiu vectorial.
Observatie
1) Daca (V ,K , ⋅) este spatiu vectorial, spunem ca grupul (V ,+)este spatiu vectorial peste K si notam: KV (cu operatiilesubıntelese);
2) Facem distinctia : elementul neutru ın (K ,+) se noteaza cu0K (sau 0), iar ın (V ,+) se noteaza cu 0V (sau 0)
3) av = 0V ⇐⇒ a = 0K sau v = 0V ; Dem: ”la tabla”
Definitia 9.3
Fie (V ,K , ϕ) un spatiu vectorial si U ⊆ V , U ≠ ∅.U s.n. subspatiu ın V daca:
a) (U,+) este subgrup al (V ,+)(⇐⇒ [∀u, v ∈ U ⇒ u − v ∈ U]);
b) (U,K , ϕ∣K×U) ramane spatiu vectorial.
Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.
Exemple 9.4
{0V } not= 0 sau V
s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.
Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii
din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.
Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.
Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] =
{f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.
Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] (
peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.
Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.
Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox =
{(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.
Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;
(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.
Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.
Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor
(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.
Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.
Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V
este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.
Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.
Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K
∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.
Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U
⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.

Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.
Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.
Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V
este subspatiu, (notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.
Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu,
(notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.

Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )
⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.
Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )⇔
[a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.
Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U,
∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.
Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];
a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.
Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n.
combinatie liniara a elementelorv1, ..., vn ∈ U.
Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara
a elementelorv1, ..., vn ∈ U.
Exemple 9.4
{0V } not= 0 sau V s.n. subspatiile improprii din V ;
Rn[x] = {f ∈ R[x]∣ grad f ≤ n} subspatiu ın R[x] ( peste R);
Ox = {(x ,0)∣x ∈ R} ≤subspatiu
RR2;(axa Ox);
Teorema de caracterizare a subspatiilor(pt. seminar)
O multime de vectori U ⊆ V este subspatiu ⇐⇒
[∀a,b ∈ K ∀u, v ∈ U ⇒ au + bv ∈ V ]
Observatie:
U ⊆ V este subspatiu, (notam KU ≤K V )⇔ [a1v1 + ... + anvn ∈ U, ∀a1, ...an ∈ K ,∀v1, ..., vn ∈ U,∀n ∈ N∗];a1v1 + ... + anvn s.n. combinatie liniara a elementelorv1, ..., vn ∈ U.
EXAMEN PARTIAL: 7 Decembrie (Sambata);
ora 9-11;
Sala: ?Aula Instalatii?;
structura examen 4 probleme tip seminar, curs sauT.A.;
1 problema ”Relatii binare”;
1 problema ”Vectori sau Generari de Suprafete”;
1 problema ”Matrici si determinanti+Vectori si Valori proprii”’
1 problema ”Forma Jordan si Aplicatii ”;
Vezi http://users.utcluj.ro/ todeacos/TeachingISA.htmlpentru ”Reguli Participare Examen si Partial”+ 1 ModelPartial.

EXAMEN PARTIAL: 7 Decembrie (Sambata); ora 9-11;
Sala: ?Aula Instalatii?;
structura examen 4 probleme tip seminar, curs sauT.A.;
1 problema ”Relatii binare”;
1 problema ”Vectori sau Generari de Suprafete”;
1 problema ”Matrici si determinanti+Vectori si Valori proprii”’
1 problema ”Forma Jordan si Aplicatii ”;
Vezi http://users.utcluj.ro/ todeacos/TeachingISA.htmlpentru ”Reguli Participare Examen si Partial”+ 1 ModelPartial.
EXAMEN PARTIAL: 7 Decembrie (Sambata); ora 9-11;
Sala:
?Aula Instalatii?;
structura examen 4 probleme tip seminar, curs sauT.A.;
1 problema ”Relatii binare”;
1 problema ”Vectori sau Generari de Suprafete”;
1 problema ”Matrici si determinanti+Vectori si Valori proprii”’
1 problema ”Forma Jordan si Aplicatii ”;
Vezi http://users.utcluj.ro/ todeacos/TeachingISA.htmlpentru ”Reguli Participare Examen si Partial”+ 1 ModelPartial.
EXAMEN PARTIAL: 7 Decembrie (Sambata); ora 9-11;
Sala: ?Aula Instalatii?;
structura examen 4 probleme tip seminar, curs sauT.A.;
1 problema ”Relatii binare”;
1 problema ”Vectori sau Generari de Suprafete”;
1 problema ”Matrici si determinanti+Vectori si Valori proprii”’
1 problema ”Forma Jordan si Aplicatii ”;
Vezi http://users.utcluj.ro/ todeacos/TeachingISA.htmlpentru ”Reguli Participare Examen si Partial”+ 1 ModelPartial.
EXAMEN PARTIAL: 7 Decembrie (Sambata); ora 9-11;
Sala: ?Aula Instalatii?;
structura examen
4 probleme tip seminar, curs sauT.A.;
1 problema ”Relatii binare”;
1 problema ”Vectori sau Generari de Suprafete”;
1 problema ”Matrici si determinanti+Vectori si Valori proprii”’
1 problema ”Forma Jordan si Aplicatii ”;
Vezi http://users.utcluj.ro/ todeacos/TeachingISA.htmlpentru ”Reguli Participare Examen si Partial”+ 1 ModelPartial.
EXAMEN PARTIAL: 7 Decembrie (Sambata); ora 9-11;
Sala: ?Aula Instalatii?;
structura examen 4 probleme tip seminar,
curs sauT.A.;
1 problema ”Relatii binare”;
1 problema ”Vectori sau Generari de Suprafete”;
1 problema ”Matrici si determinanti+Vectori si Valori proprii”’
1 problema ”Forma Jordan si Aplicatii ”;
Vezi http://users.utcluj.ro/ todeacos/TeachingISA.htmlpentru ”Reguli Participare Examen si Partial”+ 1 ModelPartial.
EXAMEN PARTIAL: 7 Decembrie (Sambata); ora 9-11;
Sala: ?Aula Instalatii?;
structura examen 4 probleme tip seminar, curs sau
T.A.;
1 problema ”Relatii binare”;
1 problema ”Vectori sau Generari de Suprafete”;
1 problema ”Matrici si determinanti+Vectori si Valori proprii”’
1 problema ”Forma Jordan si Aplicatii ”;
Vezi http://users.utcluj.ro/ todeacos/TeachingISA.htmlpentru ”Reguli Participare Examen si Partial”+ 1 ModelPartial.
EXAMEN PARTIAL: 7 Decembrie (Sambata); ora 9-11;
Sala: ?Aula Instalatii?;
structura examen 4 probleme tip seminar, curs sauT.A.;
1 problema ”Relatii binare”;
1 problema ”Vectori sau Generari de Suprafete”;
1 problema ”Matrici si determinanti+Vectori si Valori proprii”’
1 problema ”Forma Jordan si Aplicatii ”;
Vezi http://users.utcluj.ro/ todeacos/TeachingISA.htmlpentru ”Reguli Participare Examen si Partial”+ 1 ModelPartial.
EXAMEN PARTIAL: 7 Decembrie (Sambata); ora 9-11;
Sala: ?Aula Instalatii?;
structura examen 4 probleme tip seminar, curs sauT.A.;
1 problema ”Relatii binare”;
1 problema ”Vectori sau Generari de Suprafete”;
1 problema ”Matrici si determinanti+Vectori si Valori proprii”’
1 problema ”Forma Jordan si Aplicatii ”;
Vezi http://users.utcluj.ro/ todeacos/TeachingISA.htmlpentru ”Reguli Participare Examen si Partial”+ 1 ModelPartial.
EXAMEN PARTIAL: 7 Decembrie (Sambata); ora 9-11;
Sala: ?Aula Instalatii?;
structura examen 4 probleme tip seminar, curs sauT.A.;
1 problema ”Relatii binare”;
1 problema ”Vectori sau Generari de Suprafete”;
1 problema ”Matrici si determinanti+Vectori si Valori proprii”’
1 problema ”Forma Jordan si Aplicatii ”;
Vezi http://users.utcluj.ro/ todeacos/TeachingISA.htmlpentru ”Reguli Participare Examen si Partial”+ 1 ModelPartial.
EXAMEN PARTIAL: 7 Decembrie (Sambata); ora 9-11;
Sala: ?Aula Instalatii?;
structura examen 4 probleme tip seminar, curs sauT.A.;
1 problema ”Relatii binare”;
1 problema ”Vectori sau Generari de Suprafete”;
1 problema ”Matrici si determinanti+Vectori si Valori proprii”’
1 problema ”Forma Jordan si Aplicatii ”;
Vezi http://users.utcluj.ro/ todeacos/TeachingISA.htmlpentru ”Reguli Participare Examen si Partial”+ 1 ModelPartial.
EXAMEN PARTIAL: 7 Decembrie (Sambata); ora 9-11;
Sala: ?Aula Instalatii?;
structura examen 4 probleme tip seminar, curs sauT.A.;
1 problema ”Relatii binare”;
1 problema ”Vectori sau Generari de Suprafete”;
1 problema ”Matrici si determinanti+Vectori si Valori proprii”’
1 problema ”Forma Jordan si Aplicatii ”;
Vezi http://users.utcluj.ro/ todeacos/TeachingISA.htmlpentru ”Reguli Participare Examen si Partial”+ 1 ModelPartial.
EXAMEN PARTIAL: 7 Decembrie (Sambata); ora 9-11;
Sala: ?Aula Instalatii?;
structura examen 4 probleme tip seminar, curs sauT.A.;
1 problema ”Relatii binare”;
1 problema ”Vectori sau Generari de Suprafete”;
1 problema ”Matrici si determinanti+Vectori si Valori proprii”’
1 problema ”Forma Jordan si Aplicatii ”;
Vezi http://users.utcluj.ro/ todeacos/TeachingISA.htmlpentru ”Reguli Participare Examen si Partial”+ 1 ModelPartial.