
CURS 6: Forma canonica Jordan - users.utcluj.rousers.utcluj.ro/~todeacos/curs6-Alg-Jordan.pdf ·...
26
CURS 6: Forma canonic˘ a Jordan Lect. dr. Constantin-Cosmin Todea Cluj-Napoca
Transcript of CURS 6: Forma canonica Jordan - users.utcluj.rousers.utcluj.ro/~todeacos/curs6-Alg-Jordan.pdf ·...
CURS 6: Forma canonica Jordan
Lect. dr. Constantin-Cosmin Todea
Cluj-Napoca
Algoritm de determinare pt. matricea Jordan si matricea de pasaj
Fie A ∈Mn(C) cu k numarul de valori proprii distincte sii , j ∈ {1, . . . , k} doi indici.
Pasul 1 Determinam valorile proprii λ1, . . . , λk ale A ∈Mn(C),rezolvand ecuatia caracteristica
det(A− λIn) = 0,
scriem si multiplicitatile lor algebricen1, . . . , nk ; n1 + . . .+ nk = n;
Pasul 2 Pt. fiecare valoare proprie λ1, . . . , λk se determina subspatiileproprii Vλ1 , . . . ,Vλk
,obtinute din rezolvarea sistemelor de ec.liniare omogene de forma
(A− λi In) · X = O.
(Solutia generala unui asemenea sistem depinde de un nr dedi parametrii. De fapt d1 = dimC Vλ1 , . . . , dk = dimC Vλk
,care se numesc multiplicitati geometrice.)
Algoritm de determinare pt. matricea Jordan si matricea de pasaj
Fie A ∈Mn(C) cu k numarul de valori proprii distincte sii , j ∈ {1, . . . , k} doi indici.
Pasul 1 Determinam valorile proprii λ1, . . . , λk ale A ∈Mn(C),rezolvand ecuatia caracteristica
det(A− λIn) = 0,
scriem si multiplicitatile lor algebricen1, . . . , nk ; n1 + . . .+ nk = n;
Pasul 2 Pt. fiecare valoare proprie λ1, . . . , λk se determina subspatiileproprii Vλ1 , . . . ,Vλk
,obtinute din rezolvarea sistemelor de ec.liniare omogene de forma
(A− λi In) · X = O.
(Solutia generala unui asemenea sistem depinde de un nr dedi parametrii. De fapt d1 = dimC Vλ1 , . . . , dk = dimC Vλk
,care se numesc multiplicitati geometrice.)

Algoritm de determinare pt. matricea Jordan si matricea de pasaj
Fie A ∈Mn(C) cu k numarul de valori proprii distincte sii , j ∈ {1, . . . , k} doi indici.
Pasul 1 Determinam valorile proprii λ1, . . . , λk ale A ∈Mn(C),rezolvand ecuatia caracteristica
det(A− λIn) = 0,
scriem si multiplicitatile lor algebricen1, . . . , nk ; n1 + . . .+ nk = n;
Pasul 2 Pt. fiecare valoare proprie λ1, . . . , λk se determina subspatiileproprii Vλ1 , . . . ,Vλk
,obtinute din rezolvarea sistemelor de ec.liniare omogene de forma
(A− λi In) · X = O.
(Solutia generala unui asemenea sistem depinde de un nr dedi parametrii. De fapt d1 = dimC Vλ1 , . . . , dk = dimC Vλk
,care se numesc multiplicitati geometrice.)

Algoritm de determinare pt. matricea Jordan si matricea de pasaj
Fie A ∈Mn(C) cu k numarul de valori proprii distincte sii , j ∈ {1, . . . , k} doi indici.
Pasul 1 Determinam valorile proprii λ1, . . . , λk ale A ∈Mn(C),rezolvand ecuatia caracteristica
det(A− λIn) = 0,
scriem si multiplicitatile lor algebricen1, . . . , nk ; n1 + . . .+ nk = n;
Pasul 2 Pt. fiecare valoare proprie λ1, . . . , λk se determina subspatiileproprii Vλ1 , . . . ,Vλk
,obtinute din rezolvarea sistemelor de ec.liniare omogene de forma
(A− λi In) · X = O.
(Solutia generala unui asemenea sistem depinde de un nr dedi parametrii. De fapt d1 = dimC Vλ1 , . . . , dk = dimC Vλk
,care se numesc multiplicitati geometrice.)
Algoritm de determinare pt. matricea Jordan si matricea de pasaj
Fie A ∈Mn(C) cu k numarul de valori proprii distincte sii , j ∈ {1, . . . , k} doi indici.
Pasul 1 Determinam valorile proprii λ1, . . . , λk ale A ∈Mn(C),rezolvand ecuatia caracteristica
det(A− λIn) = 0,
scriem si multiplicitatile lor algebricen1, . . . , nk ; n1 + . . .+ nk = n;
Pasul 2 Pt. fiecare valoare proprie λ1, . . . , λk se determina subspatiileproprii Vλ1 , . . . ,Vλk
,
obtinute din rezolvarea sistemelor de ec.liniare omogene de forma
(A− λi In) · X = O.
(Solutia generala unui asemenea sistem depinde de un nr dedi parametrii. De fapt d1 = dimC Vλ1 , . . . , dk = dimC Vλk
,care se numesc multiplicitati geometrice.)
Algoritm de determinare pt. matricea Jordan si matricea de pasaj
Fie A ∈Mn(C) cu k numarul de valori proprii distincte sii , j ∈ {1, . . . , k} doi indici.
Pasul 1 Determinam valorile proprii λ1, . . . , λk ale A ∈Mn(C),rezolvand ecuatia caracteristica
det(A− λIn) = 0,
scriem si multiplicitatile lor algebricen1, . . . , nk ; n1 + . . .+ nk = n;
Pasul 2 Pt. fiecare valoare proprie λ1, . . . , λk se determina subspatiileproprii Vλ1 , . . . ,Vλk
,obtinute din rezolvarea sistemelor de ec.liniare omogene de forma
(A− λi In) · X = O.
(Solutia generala unui asemenea sistem depinde de un nr dedi parametrii. De fapt d1 = dimC Vλ1 , . . . , dk = dimC Vλk
,care se numesc multiplicitati geometrice.)
Algoritm de determinare pt. matricea Jordan si matricea de pasaj
Fie A ∈Mn(C) cu k numarul de valori proprii distincte sii , j ∈ {1, . . . , k} doi indici.
Pasul 1 Determinam valorile proprii λ1, . . . , λk ale A ∈Mn(C),rezolvand ecuatia caracteristica
det(A− λIn) = 0,
scriem si multiplicitatile lor algebricen1, . . . , nk ; n1 + . . .+ nk = n;
Pasul 2 Pt. fiecare valoare proprie λ1, . . . , λk se determina subspatiileproprii Vλ1 , . . . ,Vλk
,obtinute din rezolvarea sistemelor de ec.liniare omogene de forma
(A− λi In) · X = O.
(Solutia generala unui asemenea sistem depinde de un nr dedi parametrii.
De fapt d1 = dimC Vλ1 , . . . , dk = dimC Vλk,
care se numesc multiplicitati geometrice.)
Algoritm de determinare pt. matricea Jordan si matricea de pasaj
Fie A ∈Mn(C) cu k numarul de valori proprii distincte sii , j ∈ {1, . . . , k} doi indici.
Pasul 1 Determinam valorile proprii λ1, . . . , λk ale A ∈Mn(C),rezolvand ecuatia caracteristica
det(A− λIn) = 0,
scriem si multiplicitatile lor algebricen1, . . . , nk ; n1 + . . .+ nk = n;
Pasul 2 Pt. fiecare valoare proprie λ1, . . . , λk se determina subspatiileproprii Vλ1 , . . . ,Vλk
,obtinute din rezolvarea sistemelor de ec.liniare omogene de forma
(A− λi In) · X = O.
(Solutia generala unui asemenea sistem depinde de un nr dedi parametrii. De fapt d1 = dimC Vλ1 , . . . , dk = dimC Vλk
,care se numesc multiplicitati geometrice.)

Algoritm de determinare pt. matricea Jordan si matricea de pasaj
Fie A ∈Mn(C) cu k numarul de valori proprii distincte sii , j ∈ {1, . . . , k} doi indici.
Pasul 1 Determinam valorile proprii λ1, . . . , λk ale A ∈Mn(C),rezolvand ecuatia caracteristica
det(A− λIn) = 0,
scriem si multiplicitatile lor algebricen1, . . . , nk ; n1 + . . .+ nk = n;
Pasul 2 Pt. fiecare valoare proprie λ1, . . . , λk se determina subspatiileproprii Vλ1 , . . . ,Vλk
,obtinute din rezolvarea sistemelor de ec.liniare omogene de forma
(A− λi In) · X = O.
(Solutia generala unui asemenea sistem depinde de un nr dedi parametrii. De fapt d1 = dimC Vλ1 , . . . , dk = dimC Vλk
,care se numesc multiplicitati geometrice.)
Algoritm de determinare pt. matricea Jordan si matricea de pasaj
Pasul 3 a). Pt. valoare proprie λi pt. care ni = di (multiplicitateaalgebrica=multiplicitatea geometrica) se aleg di vectori propriiliniar independenti
(care vor fi coloane ale matricii de pasajP) (Obtinem ni vectori proprii liniar independenti dand, perand, parametrilor ce apar ın solutia generala a sistemelorcorespunzatoare valoarea 1, iar la restul 0);b). Pt. valoare proprie λj pt. care dj < nj (multiplicitateaalgebrica 6= multiplicitatea geometrica) celor dj vectori propriiliniar independenti (ce se pot alege) se mai adauga nj − djvectori, numiti vectori asociati.Procedam astfel:- se alege un vector propriu Xj ∈ Vλj
a.ı. sistemul neomogende ec. liniare (A− λj In) · X ′ = Xj sa fie compatibil;-daca nj − dj > 1 se alege o solutie X ′
j (vector asociat lui Xj)pt care sistemul (A− λj In) · X ′′ = X ′
j este compatibil; etcObs: Daca pt nici un vector X ′
j sistemul nu e compatibil, sereia constructia vectorilor asociati pornind de la alt vectorpropriu!
Algoritm de determinare pt. matricea Jordan si matricea de pasaj
Pasul 3 a). Pt. valoare proprie λi pt. care ni = di (multiplicitateaalgebrica=multiplicitatea geometrica) se aleg di vectori propriiliniar independenti (care vor fi coloane ale matricii de pasajP)
(Obtinem ni vectori proprii liniar independenti dand, perand, parametrilor ce apar ın solutia generala a sistemelorcorespunzatoare valoarea 1, iar la restul 0);b). Pt. valoare proprie λj pt. care dj < nj (multiplicitateaalgebrica 6= multiplicitatea geometrica) celor dj vectori propriiliniar independenti (ce se pot alege) se mai adauga nj − djvectori, numiti vectori asociati.Procedam astfel:- se alege un vector propriu Xj ∈ Vλj
a.ı. sistemul neomogende ec. liniare (A− λj In) · X ′ = Xj sa fie compatibil;-daca nj − dj > 1 se alege o solutie X ′
j (vector asociat lui Xj)pt care sistemul (A− λj In) · X ′′ = X ′
j este compatibil; etcObs: Daca pt nici un vector X ′
j sistemul nu e compatibil, sereia constructia vectorilor asociati pornind de la alt vectorpropriu!
Algoritm de determinare pt. matricea Jordan si matricea de pasaj
Pasul 3 a). Pt. valoare proprie λi pt. care ni = di (multiplicitateaalgebrica=multiplicitatea geometrica) se aleg di vectori propriiliniar independenti (care vor fi coloane ale matricii de pasajP) (Obtinem ni vectori proprii liniar independenti dand, perand, parametrilor ce apar ın solutia generala a sistemelorcorespunzatoare valoarea 1, iar la restul 0);
b). Pt. valoare proprie λj pt. care dj < nj (multiplicitateaalgebrica 6= multiplicitatea geometrica) celor dj vectori propriiliniar independenti (ce se pot alege) se mai adauga nj − djvectori, numiti vectori asociati.Procedam astfel:- se alege un vector propriu Xj ∈ Vλj
a.ı. sistemul neomogende ec. liniare (A− λj In) · X ′ = Xj sa fie compatibil;-daca nj − dj > 1 se alege o solutie X ′
j (vector asociat lui Xj)pt care sistemul (A− λj In) · X ′′ = X ′
j este compatibil; etcObs: Daca pt nici un vector X ′
j sistemul nu e compatibil, sereia constructia vectorilor asociati pornind de la alt vectorpropriu!
Algoritm de determinare pt. matricea Jordan si matricea de pasaj
Pasul 3 a). Pt. valoare proprie λi pt. care ni = di (multiplicitateaalgebrica=multiplicitatea geometrica) se aleg di vectori propriiliniar independenti (care vor fi coloane ale matricii de pasajP) (Obtinem ni vectori proprii liniar independenti dand, perand, parametrilor ce apar ın solutia generala a sistemelorcorespunzatoare valoarea 1, iar la restul 0);b). Pt. valoare proprie λj pt. care dj < nj (multiplicitateaalgebrica 6= multiplicitatea geometrica) celor dj vectori propriiliniar independenti (ce se pot alege) se mai adauga nj − djvectori, numiti vectori asociati.
Procedam astfel:- se alege un vector propriu Xj ∈ Vλj
a.ı. sistemul neomogende ec. liniare (A− λj In) · X ′ = Xj sa fie compatibil;-daca nj − dj > 1 se alege o solutie X ′
j (vector asociat lui Xj)pt care sistemul (A− λj In) · X ′′ = X ′
j este compatibil; etcObs: Daca pt nici un vector X ′
j sistemul nu e compatibil, sereia constructia vectorilor asociati pornind de la alt vectorpropriu!
Algoritm de determinare pt. matricea Jordan si matricea de pasaj
Pasul 3 a). Pt. valoare proprie λi pt. care ni = di (multiplicitateaalgebrica=multiplicitatea geometrica) se aleg di vectori propriiliniar independenti (care vor fi coloane ale matricii de pasajP) (Obtinem ni vectori proprii liniar independenti dand, perand, parametrilor ce apar ın solutia generala a sistemelorcorespunzatoare valoarea 1, iar la restul 0);b). Pt. valoare proprie λj pt. care dj < nj (multiplicitateaalgebrica 6= multiplicitatea geometrica) celor dj vectori propriiliniar independenti (ce se pot alege) se mai adauga nj − djvectori, numiti vectori asociati.Procedam astfel:
- se alege un vector propriu Xj ∈ Vλja.ı. sistemul neomogen
de ec. liniare (A− λj In) · X ′ = Xj sa fie compatibil;-daca nj − dj > 1 se alege o solutie X ′
j (vector asociat lui Xj)pt care sistemul (A− λj In) · X ′′ = X ′
j este compatibil; etcObs: Daca pt nici un vector X ′
j sistemul nu e compatibil, sereia constructia vectorilor asociati pornind de la alt vectorpropriu!
Algoritm de determinare pt. matricea Jordan si matricea de pasaj
Pasul 3 a). Pt. valoare proprie λi pt. care ni = di (multiplicitateaalgebrica=multiplicitatea geometrica) se aleg di vectori propriiliniar independenti (care vor fi coloane ale matricii de pasajP) (Obtinem ni vectori proprii liniar independenti dand, perand, parametrilor ce apar ın solutia generala a sistemelorcorespunzatoare valoarea 1, iar la restul 0);b). Pt. valoare proprie λj pt. care dj < nj (multiplicitateaalgebrica 6= multiplicitatea geometrica) celor dj vectori propriiliniar independenti (ce se pot alege) se mai adauga nj − djvectori, numiti vectori asociati.Procedam astfel:- se alege un vector propriu Xj ∈ Vλj
a.ı. sistemul neomogende ec. liniare (A− λj In) · X ′ = Xj sa fie compatibil;
-daca nj − dj > 1 se alege o solutie X ′j (vector asociat lui Xj)
pt care sistemul (A− λj In) · X ′′ = X ′j este compatibil; etc
Obs: Daca pt nici un vector X ′j sistemul nu e compatibil, se
reia constructia vectorilor asociati pornind de la alt vectorpropriu!
Algoritm de determinare pt. matricea Jordan si matricea de pasaj
Pasul 3 a). Pt. valoare proprie λi pt. care ni = di (multiplicitateaalgebrica=multiplicitatea geometrica) se aleg di vectori propriiliniar independenti (care vor fi coloane ale matricii de pasajP) (Obtinem ni vectori proprii liniar independenti dand, perand, parametrilor ce apar ın solutia generala a sistemelorcorespunzatoare valoarea 1, iar la restul 0);b). Pt. valoare proprie λj pt. care dj < nj (multiplicitateaalgebrica 6= multiplicitatea geometrica) celor dj vectori propriiliniar independenti (ce se pot alege) se mai adauga nj − djvectori, numiti vectori asociati.Procedam astfel:- se alege un vector propriu Xj ∈ Vλj
a.ı. sistemul neomogende ec. liniare (A− λj In) · X ′ = Xj sa fie compatibil;-daca nj − dj > 1 se alege o solutie X ′
j (vector asociat lui Xj)pt care sistemul (A− λj In) · X ′′ = X ′
j este compatibil; etc
Obs: Daca pt nici un vector X ′j sistemul nu e compatibil, se
reia constructia vectorilor asociati pornind de la alt vectorpropriu!
Algoritm de determinare pt. matricea Jordan si matricea de pasaj
Pasul 3 a). Pt. valoare proprie λi pt. care ni = di (multiplicitateaalgebrica=multiplicitatea geometrica) se aleg di vectori propriiliniar independenti (care vor fi coloane ale matricii de pasajP) (Obtinem ni vectori proprii liniar independenti dand, perand, parametrilor ce apar ın solutia generala a sistemelorcorespunzatoare valoarea 1, iar la restul 0);b). Pt. valoare proprie λj pt. care dj < nj (multiplicitateaalgebrica 6= multiplicitatea geometrica) celor dj vectori propriiliniar independenti (ce se pot alege) se mai adauga nj − djvectori, numiti vectori asociati.Procedam astfel:- se alege un vector propriu Xj ∈ Vλj
a.ı. sistemul neomogende ec. liniare (A− λj In) · X ′ = Xj sa fie compatibil;-daca nj − dj > 1 se alege o solutie X ′
j (vector asociat lui Xj)pt care sistemul (A− λj In) · X ′′ = X ′
j este compatibil; etcObs: Daca pt nici un vector X ′
j sistemul nu e compatibil, sereia constructia vectorilor asociati pornind de la alt vectorpropriu!
Algoritm de determinare pt. matricea Jordan si matricea de pasaj
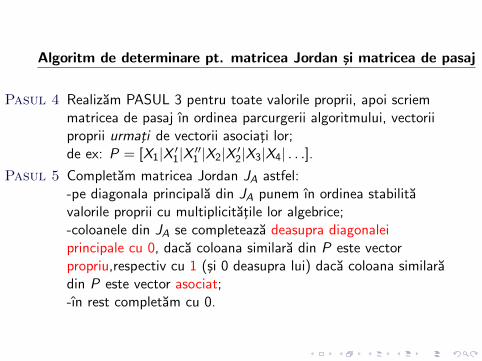
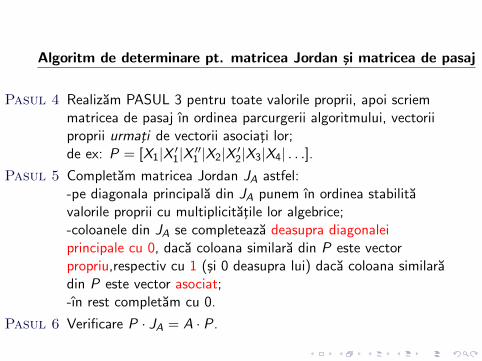
Pasul 4 Realizam PASUL 3 pentru toate valorile proprii, apoi scriemmatricea de pasaj ın ordinea parcurgerii algoritmului, vectoriiproprii urmati de vectorii asociati lor;de ex: P = [X1|X ′
1|X ′′1 |X2|X ′
2|X3|X4| . . .].
Pasul 5 Completam matricea Jordan JA astfel:-pe diagonala principala din JA punem ın ordinea stabilitavalorile proprii cu multiplicitatile lor algebrice;-coloanele din JA se completeaza deasupra diagonaleiprincipale cu 0, daca coloana similara din P este vectorpropriu,respectiv cu 1 (si 0 deasupra lui) daca coloana similaradin P este vector asociat;-ın rest completam cu 0.
Pasul 6 Verificare P · JA = A · P.
Algoritm de determinare pt. matricea Jordan si matricea de pasaj
Pasul 4 Realizam PASUL 3 pentru toate valorile proprii, apoi scriemmatricea de pasaj ın ordinea parcurgerii algoritmului, vectoriiproprii urmati de vectorii asociati lor;de ex: P = [X1|X ′
1|X ′′1 |X2|X ′
2|X3|X4| . . .].Pasul 5 Completam matricea Jordan JA astfel:
-pe diagonala principala din JA punem ın ordinea stabilitavalorile proprii cu multiplicitatile lor algebrice;-coloanele din JA se completeaza deasupra diagonaleiprincipale cu 0, daca coloana similara din P este vectorpropriu,respectiv cu 1 (si 0 deasupra lui) daca coloana similaradin P este vector asociat;-ın rest completam cu 0.
Pasul 6 Verificare P · JA = A · P.
Algoritm de determinare pt. matricea Jordan si matricea de pasaj
Pasul 4 Realizam PASUL 3 pentru toate valorile proprii, apoi scriemmatricea de pasaj ın ordinea parcurgerii algoritmului, vectoriiproprii urmati de vectorii asociati lor;de ex: P = [X1|X ′
1|X ′′1 |X2|X ′
2|X3|X4| . . .].Pasul 5 Completam matricea Jordan JA astfel:
-pe diagonala principala din JA punem ın ordinea stabilitavalorile proprii cu multiplicitatile lor algebrice;
-coloanele din JA se completeaza deasupra diagonaleiprincipale cu 0, daca coloana similara din P este vectorpropriu,respectiv cu 1 (si 0 deasupra lui) daca coloana similaradin P este vector asociat;-ın rest completam cu 0.
Pasul 6 Verificare P · JA = A · P.
Algoritm de determinare pt. matricea Jordan si matricea de pasaj
Pasul 4 Realizam PASUL 3 pentru toate valorile proprii, apoi scriemmatricea de pasaj ın ordinea parcurgerii algoritmului, vectoriiproprii urmati de vectorii asociati lor;de ex: P = [X1|X ′
1|X ′′1 |X2|X ′
2|X3|X4| . . .].Pasul 5 Completam matricea Jordan JA astfel:
-pe diagonala principala din JA punem ın ordinea stabilitavalorile proprii cu multiplicitatile lor algebrice;-coloanele din JA se completeaza deasupra diagonaleiprincipale cu 0, daca coloana similara din P este vectorpropriu,
respectiv cu 1 (si 0 deasupra lui) daca coloana similaradin P este vector asociat;-ın rest completam cu 0.
Pasul 6 Verificare P · JA = A · P.
Algoritm de determinare pt. matricea Jordan si matricea de pasaj
Pasul 4 Realizam PASUL 3 pentru toate valorile proprii, apoi scriemmatricea de pasaj ın ordinea parcurgerii algoritmului, vectoriiproprii urmati de vectorii asociati lor;de ex: P = [X1|X ′
1|X ′′1 |X2|X ′
2|X3|X4| . . .].Pasul 5 Completam matricea Jordan JA astfel:
-pe diagonala principala din JA punem ın ordinea stabilitavalorile proprii cu multiplicitatile lor algebrice;-coloanele din JA se completeaza deasupra diagonaleiprincipale cu 0, daca coloana similara din P este vectorpropriu,respectiv cu 1 (si 0 deasupra lui) daca coloana similaradin P este vector asociat;
-ın rest completam cu 0.
Pasul 6 Verificare P · JA = A · P.
Algoritm de determinare pt. matricea Jordan si matricea de pasaj
Pasul 4 Realizam PASUL 3 pentru toate valorile proprii, apoi scriemmatricea de pasaj ın ordinea parcurgerii algoritmului, vectoriiproprii urmati de vectorii asociati lor;de ex: P = [X1|X ′
1|X ′′1 |X2|X ′
2|X3|X4| . . .].Pasul 5 Completam matricea Jordan JA astfel:
-pe diagonala principala din JA punem ın ordinea stabilitavalorile proprii cu multiplicitatile lor algebrice;-coloanele din JA se completeaza deasupra diagonaleiprincipale cu 0, daca coloana similara din P este vectorpropriu,respectiv cu 1 (si 0 deasupra lui) daca coloana similaradin P este vector asociat;-ın rest completam cu 0.
Pasul 6 Verificare P · JA = A · P.
Algoritm de determinare pt. matricea Jordan si matricea de pasaj
Pasul 4 Realizam PASUL 3 pentru toate valorile proprii, apoi scriemmatricea de pasaj ın ordinea parcurgerii algoritmului, vectoriiproprii urmati de vectorii asociati lor;de ex: P = [X1|X ′
1|X ′′1 |X2|X ′
2|X3|X4| . . .].Pasul 5 Completam matricea Jordan JA astfel:
-pe diagonala principala din JA punem ın ordinea stabilitavalorile proprii cu multiplicitatile lor algebrice;-coloanele din JA se completeaza deasupra diagonaleiprincipale cu 0, daca coloana similara din P este vectorpropriu,respectiv cu 1 (si 0 deasupra lui) daca coloana similaradin P este vector asociat;-ın rest completam cu 0.
Pasul 6 Verificare P · JA = A · P.
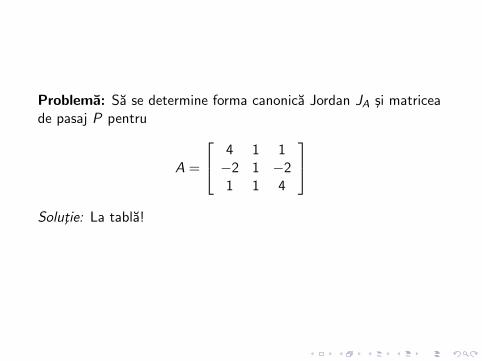
Problema: Sa se determine forma canonica Jordan JA si matriceade pasaj P pentru
A =
4 1 1−2 1 −21 1 4
Solutie: La tabla!


















