Aula 16.pptx
25
Aula 16 Circuitos de Comando
Transcript of Aula 16.pptx
Aula 16
Circuitos de Comando
Aula 15
• Gradadores
Aula 16
• Outra aplicação de gradadores;– Compensação de reativo;
• Circuitos de comando.
COMPENSADOR ESTÁTICO DE POTÊNCIA REATIVA
T1L
+
i
vT2
-
t
v
i
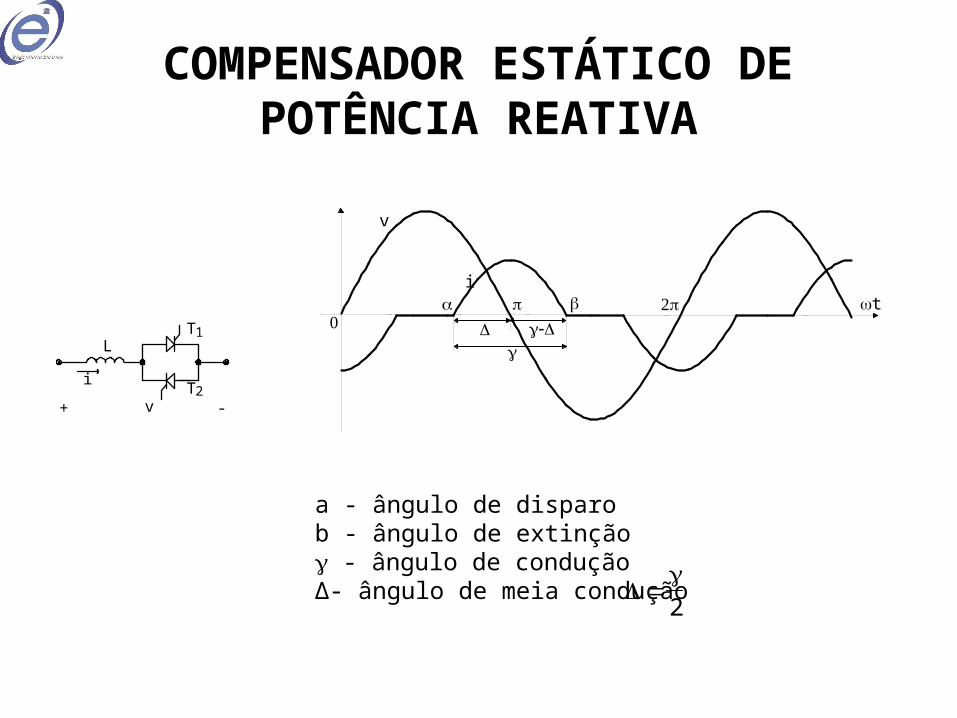
a - ângulo de disparob - ângulo de extinção - ângulo de conduçãoΔ- ângulo de meia condução
2
LL
seneq
( )2 2
COMPENSADOR ESTÁTICO DE POTÊNCIA REATIVA
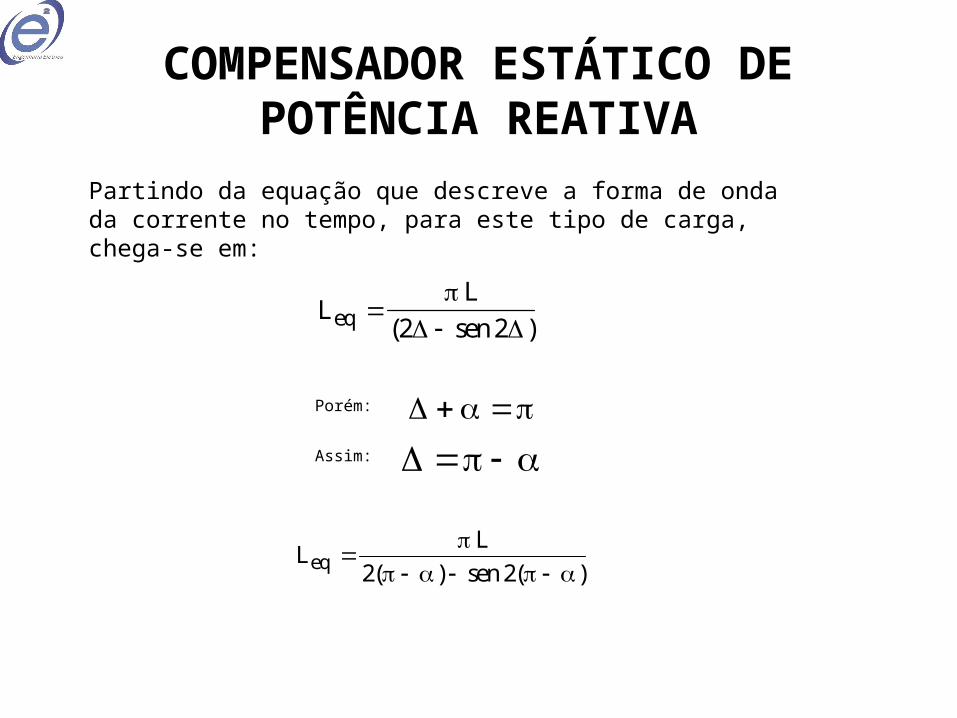
Porém:
Assim:
Partindo da equação que descreve a forma de onda da corrente no tempo, para este tipo de carga, chega-se em:
LL
seneq
2 2( ) ( )
COMPENSADOR ESTÁTICO DE POTÊNCIA REATIVA
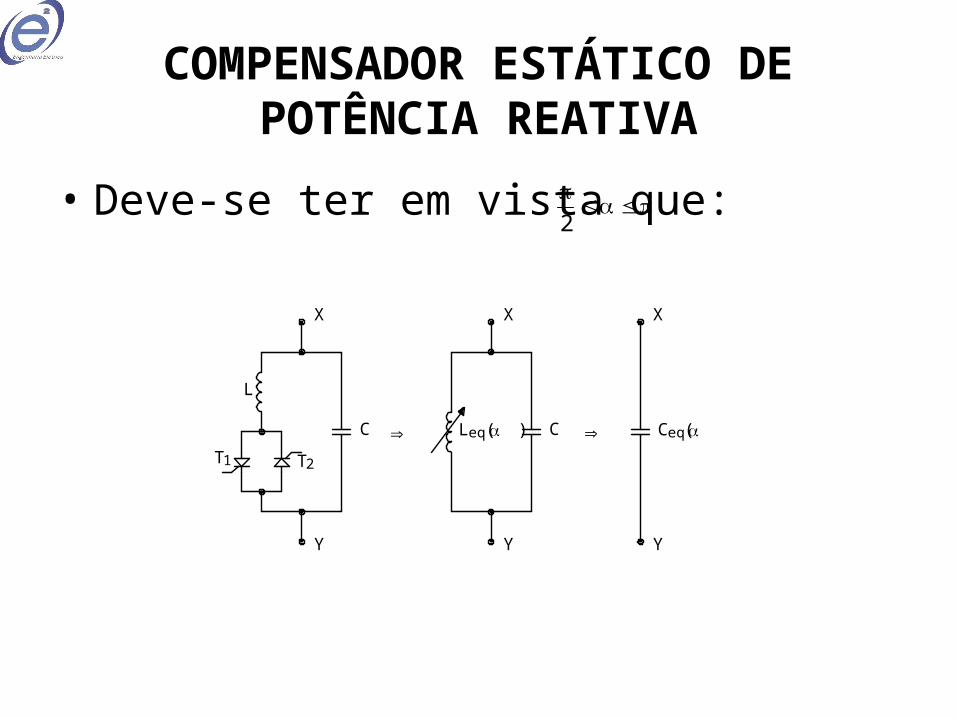
• Deve-se ter em vista que:
2
XXX
L
C CLeq Ceq
T2T1
Y Y Y
( ) ( )
COMPENSADOR ESTÁTICO DE POTÊNCIA REATIVA
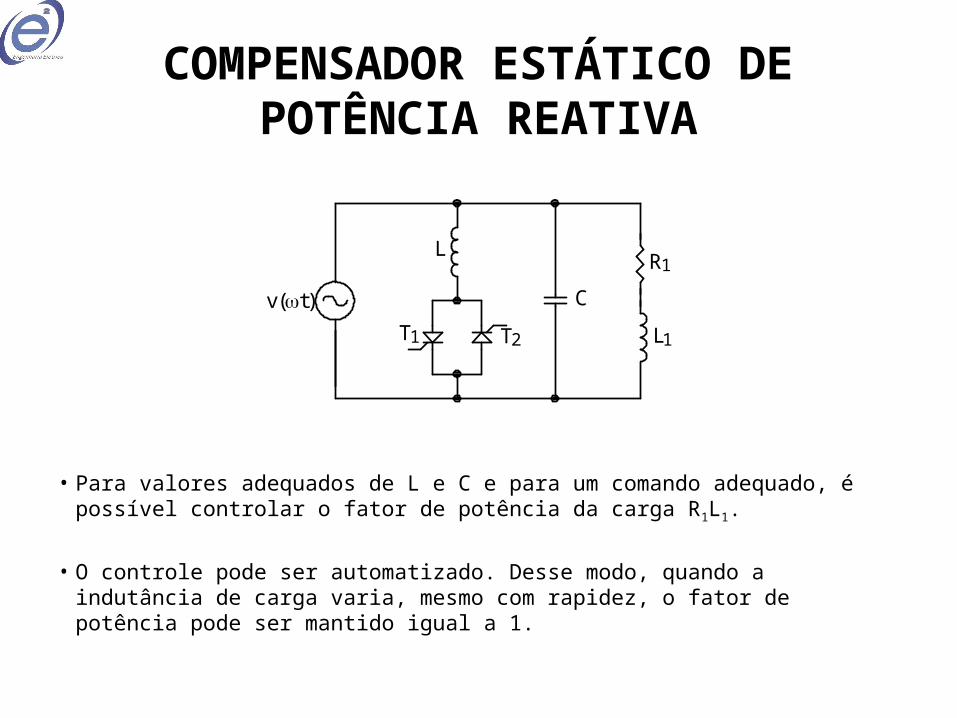
• Para valores adequados de L e C e para um comando adequado, é possível controlar o fator de potência da carga R1L1.
• O controle pode ser automatizado. Desse modo, quando a indutância de carga varia, mesmo com rapidez, o fator de potência pode ser mantido igual a 1.
L
C
L
R1
1T2T1
v t( )
Comando
Comando
• FUNÇÃO– Enviar aos gatilhos dos tiristores as correntes de
disparo:• formas e valores adequados;• instantes bem determinados.
– Colocá-los em condução.
COMANDOS VERTICAL E HORIZONTAL+
vL
-
iGR1v t( )
VC
1v
Lv
Mv
t
t
t
t
a
b
c
d
e
t
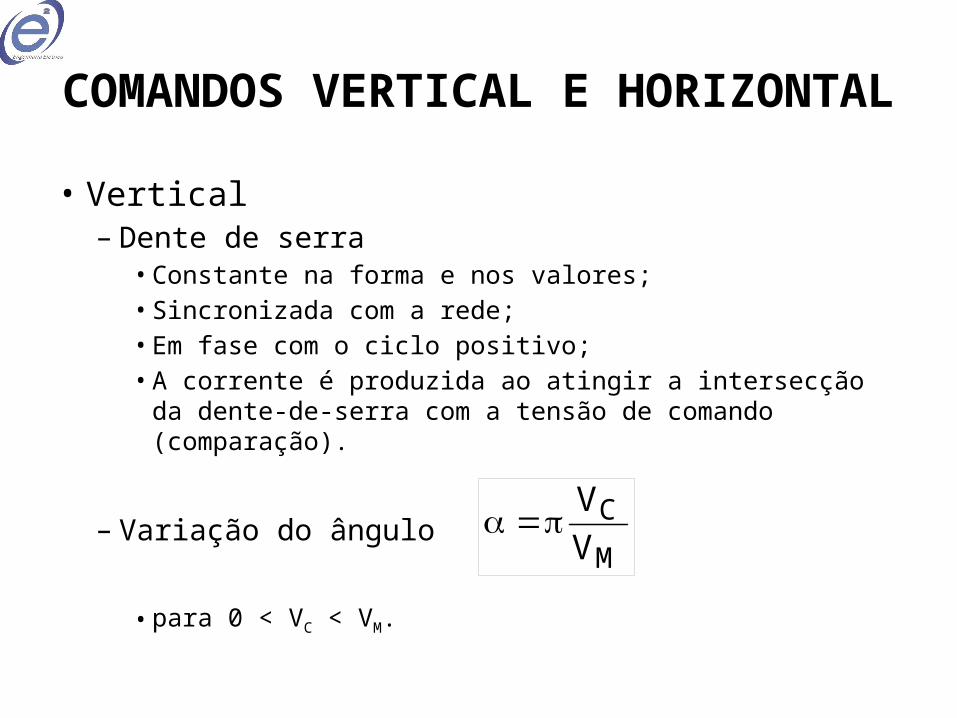
• Vertical– Dente de serra
• Constante na forma e nos valores;• Sincronizada com a rede;• Em fase com o ciclo positivo;• A corrente é produzida ao atingir a intersecção da dente-de-
serra com a tensão de comando (comparação).
– Variação do ângulo
• para 0 < VC < VM.
COMANDOS VERTICAL E HORIZONTAL
V
VC
M

• Horizontal– Dente de serra
• Constante na forma e nos valores;• Sincronizada com a rede;• A corrente é produzida no instante em que a dente-de-
serra é maior que zero.
– A variação do ângulo ocorre com o deslocamento horizontal da dente-de-serra.
COMANDOS VERTICAL E HORIZONTAL
Comando
• Nos conversores industriais– comando vertical é praticamente o único
empregado.
• O comando horizontal é empregado nos sistemas simples– como o controle de intensidade luminosa de
pequenas potências ou de velocidade de pequenos motores.
Comando
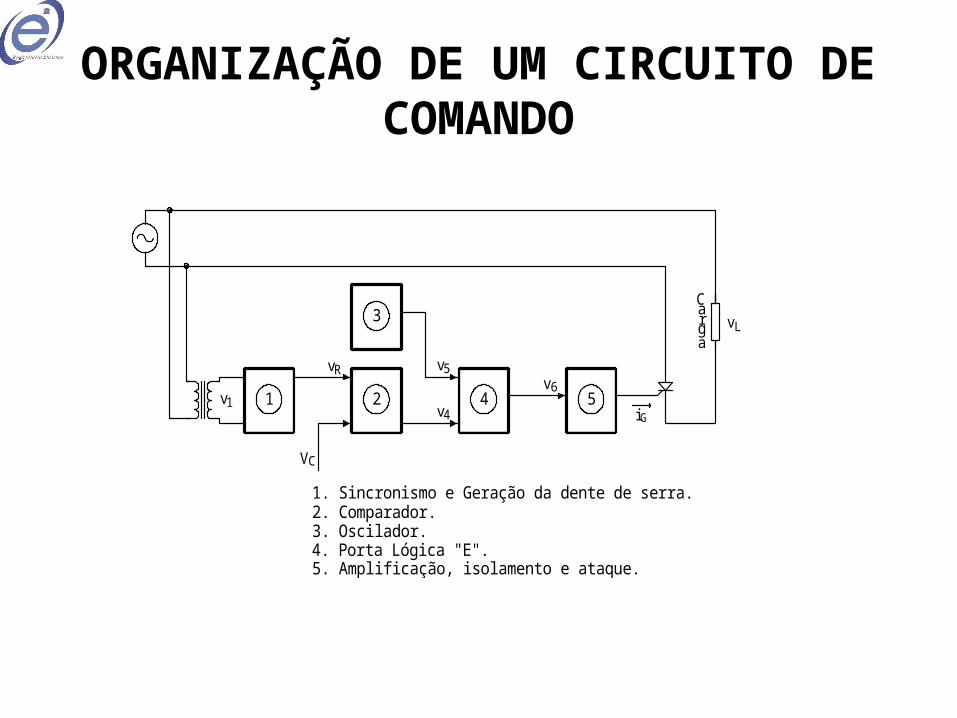
ORGANIZAÇÃO DE UM CIRCUITO DE COMANDO
vL
Carga
3
1v1 2
vR v5
v44
v65
iG
VC
2. Comparador.1. Sincronismo e Geração da dente de serra.
3. Oscilador.
5. Amplificação, isolamento e ataque.4. Porta Lógica "E".

v1
vL
iG
v6
v5
v4
vRVC
t
t
t
t
t
t
t
vL
Carga
3
1v1 2
vR v5
v44
v65
iG
VC
2. Comparador.1. Sincronismo e Geração da dente de serra.
3. Oscilador.
5. Amplificação, isolamento e ataque.4. Porta Lógica "E".
Estágio de Ataque
• Amplificar os sinais de comando oriundos dos estágios de sinais;
• Propiciar o isolamento adequado entre o comando e o tiristor;
• Atacar o tiristor com características de fonte de corrente e não como fonte de tensão;
• Impedir que uma tensão negativa seja aplicada na junção gatilho-catodo.
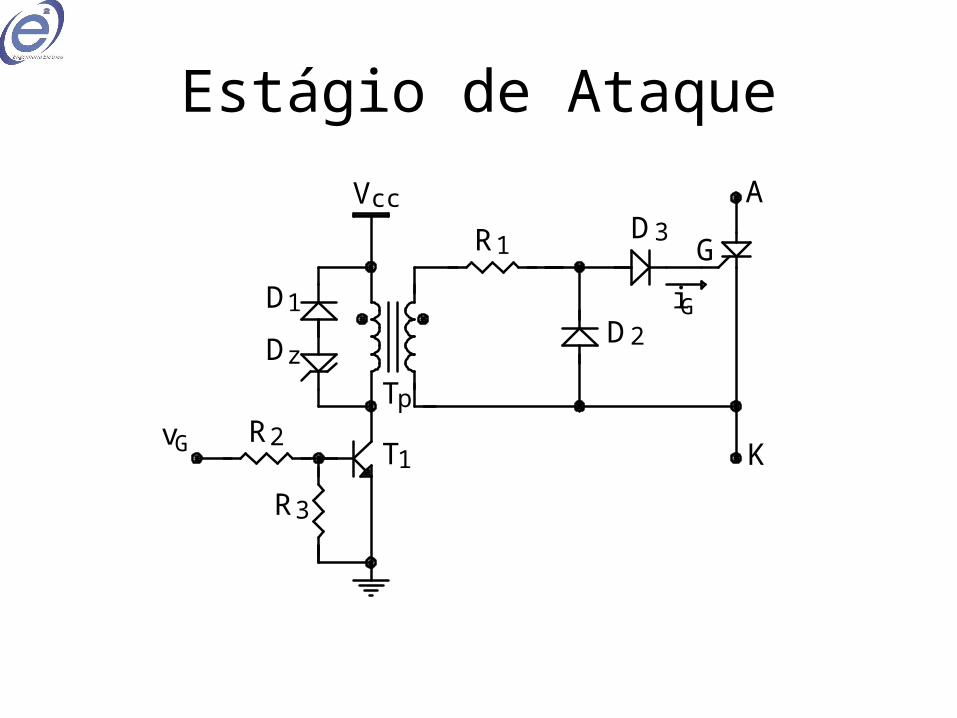
Estágio de Ataque
V
R1
ccD3
A
G
2DGi
Tp
D1
Dz
R2
R3
GvT1 K
SINCRONIZAÇÃO DO RETIFICADOR DE MEIA ONDA MONOFÁSICA
vRede
vR
t
t
T1
R
3
A2
C
vVcc
R3-
A1
R1
Rede
TR
R2
DURAÇÃO DOS PULSOS DE GATILHO
• Carga puramente resistiva– pulso de corrente de gatilho com 10ms de duração é suficiente;
• Carga é indutiva– a corrente de gatilho deve ser mantida
• corrente de ânodo atinja o valor da corrente de retenção IL.• Se a duração do pulso de corrente de gatilho não for suficiente, quando
ela se anula o tiristor se bloqueia.
• Há casos particulares onde devem ser empregados pulsos de corrente longos em relação à duração necessária para se disparar um único tiristor.
t t
t1 t2 t1 t2 t1 t2 t3t3t3
iG
iL
Eot
t
t
vL
DURAÇÃO DOS PULSOS DE GATILHO
Se Não conduz
t t t 2 1
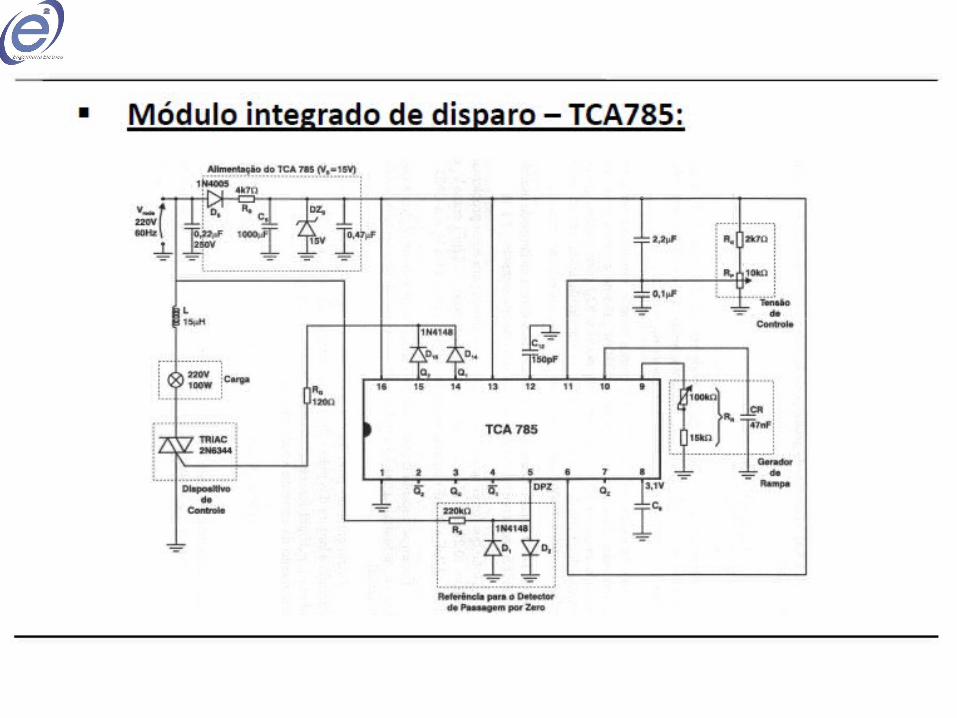
MÓDULOS DE COMANDOS INTEGRADOS
• Redução do volume dos circuitos de comando;
• Aumento considerável na confiabilidade;
• TCA785.
C12
12
5 12
14415237
6
3=
16
7 =
4
5
1
R9
89C
1010
136
8
I
V11
v5
v10 V11
P
v15a
v14a
v15b
v14b
v3
v7
P
N N
t
t
t
t
t
t
t
t
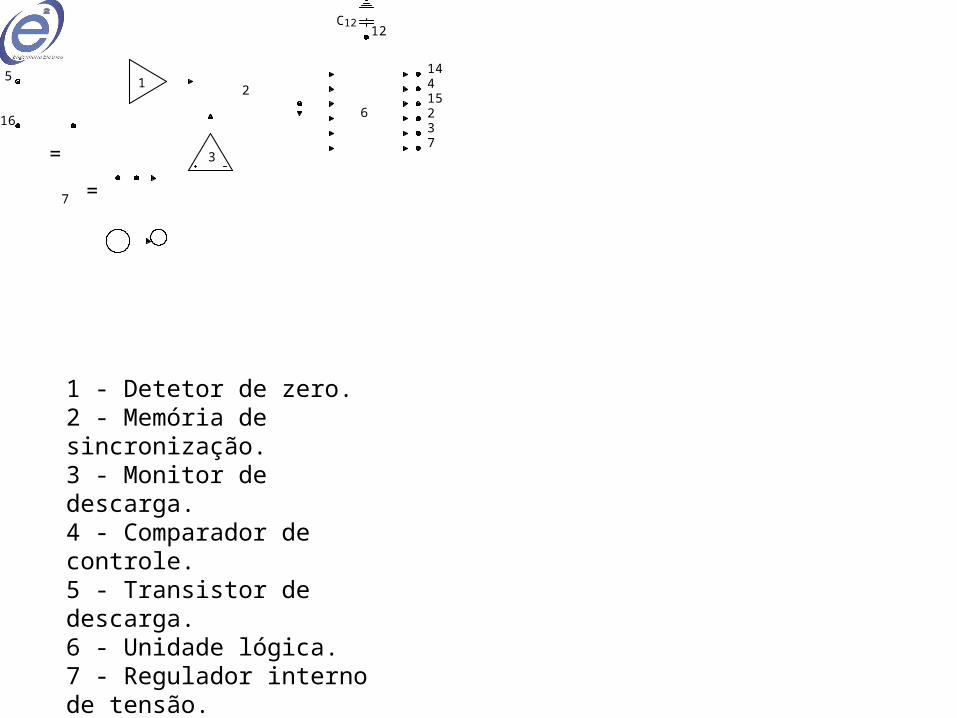
1 - Detetor de zero.2 - Memória de sincronização.3 - Monitor de descarga.4 - Comparador de controle.5 - Transistor de descarga.6 - Unidade lógica.7 - Regulador interno de tensão.8 - Fonte controlada de corrente constante.
• v5 tensão de sincronização proveniente da rede.
• v10 é a rampa, disponível no pino 10.– O capacitor externo C10 é carregado linearmente
por uma fonte de corrente definida pelo resistor externo R9.
• v15 e v14 são os sinais de saída, sincronizados com o ciclo positivo e negativo da tensão de sincronização.
• A largura desses pulsos é alterada pelo capacitor externo C12.
– Quando o pino 12 é aterrado a largura do pulso atinge 180o, ou seja, a largura é igual a 180o - .
• Para o comando de um Triac pode ser empregada a tensão v7 que é uma combinação lógica dos sinais v14 e v15.
• A tensão de alimentação é ligada ao pino 16 e pode estar compreendida entre 8 e 18V.
v5
v10 V11
P
v15a
v14a
v15b
v14b
v3
v7
P
N N
t
t
t
t
t
t
t
t