Aspects ThØoriques et NumØriques pour les Fluides ...
80
A T N F I T N I I F F Chapter : The Stokes Model Instructors: Pascal Frey, Yannick Privat Sorbonne Université, CNRS , place Jussieu, Paris master ANEDP, -
Transcript of Aspects ThØoriques et NumØriques pour les Fluides ...

Aspects Théoriques et Numériques pour les Fluides IncompressiblesTheoretical and Numerical Issues of Incompressible Fluid Flows
Chapter 2: The Stokes Model
Instructors: Pascal Frey, Yannick Privat
Sorbonne Université, CNRS4, place Jussieu, Paris
master ANEDP, 2019-2020

Section 2.1Mathematical and numerical analysis

Viscous incompressible flows
Take conservation laws and make simplications: ρ and µ constant
• continuity equation:∂ρ
∂t+ div(ρu) = 0 → div u = 0
• inertial terms:∂(ρu)
∂t+ div(ρu× u) = ρ
(∂u
∂t+ u · ∇u
)= ρ
du
dt
• stress tensor: div σ = µdiv(∇u+∇ut) = µ(div∇u+∇∇ · u) = µ∆u
• Stokes ow, Re→ 0, thendu
dt≈∂u
∂t≈ 0
momentum equation:
ρ∂u
∂t= −∇p+ µ∆u
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 3/ 80

The Stokes modelModel: linear Stokes problem a toy problem
• posed in a bounded regular domain Ω, endowed with
• homogeneous Dirichlet boundary conditions
Given f ; nd (u, p) such that:− µ∆u+∇p = f , in Ω
div u = 0 , in Ω
u = 0 , on ∂Ω
, (1)
(and we consider hereafter the viscosity parameter µ equal to 1, for simplicity).
• Remark: not physically realistic because of homogeneous Dirichlet boundary con-ditions.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 4/ 80

Classical formulation
1. Classical solution:a pair (u, p) ∈ (C2(Ω) ∩ C0(Ω))× (C1(Ω)) is a classical solution of the Stokesproblem if it satises eq. (1).
2. Non-uniqueness:• if (u, p) is solution then (u, p+ c) is a solution, too.• to avoid the undeterminacy, 2 possibilities:(a) either impose the value of p at a given point x0 in the domain, p(x0) = p0
but, not consistent with the functional setting of p ∈ L2(Ω).(b) or require the pressure to have null average:
Here, we impose the zero mean condition of p over the domain Ω:∫
Ωpdx = 0
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 5/ 80

Variational formulation• Concept:
equation is not required to hold absolutely but has weak solutions with respectto test functions;
problem reformulated in the sense of distributions.
• Approach:by multiplying the rst and second equations by a test function v ∈ V and q ∈ Qand by integrating over Ω, we obtain, thanks to the divergence theorem, the set ofequations:
∫
Ω∇u : ∇v dx−
∫
Ωdiv v pdx =
∫
Ωf v dx+
∫
∂Ω
∂u
∂nv ds
︸ ︷︷ ︸v|∂Ω=0∫
Ωdiv u q dx = 0 .
where V and Q are suitable functional spaces.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 6/ 80

Variational formulation
• Functional spaces: Hilbert spaces velocity space V (to account for homogeneous BC):
V = H10(Ω) (2)
pressure space Q:
Q = L20(Ω) =
q ∈ L2(Ω) ;
∫
Ωq dx = 0
. (3)
• Abstract formulation: we dene the bilinear forms a : V ×V → R and b : V ×Q→ R
a(u, v) =∫
Ω∇u : ∇v dx , and b(u, q) = −
∫
Ωdiv u q dx . (4)
and we introduce the following abstract weak formulation:
Given f ; nd (u, p) ∈ V ×Q , such that for all (v, q) ∈ V ×Qa(u, v) + b(v, p) = (f, v) ,
b(u, q) = 0 ,
(5)
where (·, ·) is the duality pairing between functions f ∈ H−1(Ω) and v ∈ H10(Ω).
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 7/ 80

Variational formulation
• Non-homogeneous Dirichlet boundary conditions: u = g on ∂Ω:yields the following weak formulation:
Given f ; nd (w, p) ∈ V ×Q , such that for all (v, q) ∈ V ×Qa(w, v) + b(v, p) = (f, v)− a(ug, v)
− b(w, q) = b(ug, q) ,
(6)
where V and Q are the spaces introduced above and ug ∈ H1(Ω) is a lifting of theboundary condition g:
w = u− ug .
• Problems (5)-(6) are called saddle-point problems.
• pressure p is the Lagrange multiplier associated with the incompressibility con-straint.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 8/ 80

Linear operators
• Linear operator and bilinear form are related by a one-to-one mapping:
given V = H10(Ω) and Q = L2
0(Ω),
for the bilinear form a : V × V → R, consider operator A : V → V ′:
〈Au, v〉 = a(u, v) , ∀ (u, v) ∈ V × V . (7)
for the bilinear form b : V ×Q→ R, consider operator B : V → Q′:
〈Bu, q〉 = b(u, q) , ∀ (u, v) ∈ V ×Q .
and the dual operator B′ : Q→ V ′:
〈B′q, u〉 = 〈Bu, q〉 = b(u, q) , ∀ (u, v) ∈ V ×Q .
Many properties of linear operators can be inherited from corresponding prop-erties of bilinear forms: continuity, positivity and ellipticity, or symmetry.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 9/ 80

Operator equations for Stokes
• Using these operators, the variational problem (5) is equivalent to the problem:
Given f ; nd (u, p) ∈ V ×Q , such that for all (v, q) ∈ V ×QAu+B′p = f , in V ′
Bu = 0 , in Q′(8)
• Consider the spaces: X = KerB in V ; X = v ∈ V ; b(v, q) = 0 , ∀ q ∈ Q ,the polar set of X ; X0 = g ∈ V ′ ; 〈g, v〉 = 0 , ∀ v ∈ X .
• Lemma 1. The following statements are equivalent1. there exists a constant β > 0 such that
infq∈Q
supv∈V
b(v, q)
‖v‖V ‖q‖X≥ β , (9)
2. the operator B′ is an isomorphism from Q onto X0, and ‖B′q‖V ′ ≥ β‖v‖Q ,3. the operator B is an isomorphism from X⊥ to Q′ and ‖Bv‖Q′ ≥ β‖v‖V .
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 10/ 80

Operator equations for Stokes
• Existence and uniqueness of a solution to the Stokes problem can be established:
Theorem 1 (Brezzi splitting theorem). The solution operator
L : V ×Q → V ′ ×Q′
(u, p) 7→ (f,0)
is an isomorphism if and only if the following conditions are satised:1. the bilinear form a(·, ·) is coercive on V , i.e., there exists α > 0 such that
a(v, v) ≥ α ‖v‖2V , ∀ v ∈ V .
2. the bilinear form b(·, ·) satises the inf-sup condition (9).
Then, the Stokes problem (5) is well-posed.
• The coercivity of the bilinear form a(·, ·) implies that the functional associated toStokes’ problem is strictly convex on the feasible set.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 11/ 80

A saddle-point approach
Stokes problem can be formulated as a minimization problem:
• consider the energy functional J : V → R dened by
J(v) =1
2a(v, v)− (f, v) =
1
2a(v, v)− f(v) . (10)
• the solution (u, p) is a minimizer of the objective function J(·) subject to the con-straint b(v, q) = 0.
• we introduce an associated quadratic functional L : V ×Q→ R dened by:
L(v, q) = J(v) + b(v, q) =1
2a(v, v) + b(v, q)− f(v) . (11)
The functional L(·, ·) is the Lagrangian functional associated with the Stokes prob-lem.
• nd a saddle-point (u, p) of the Lagrangian functional over V ×Q, i.e. such that
L(u, q) ≤ L(u, p) ≤ L(v, p) , ∀ (v, q) ∈ V ×Q . (12)
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 12/ 80

A saddle-point approach
• Existence of a solution:
Lemma 2. The pair (u, p) ∈ V ×Q solves the Stokes problem (5) if and only if (u, p)
is a saddle-point of the Lagrangian functional L(v, q)
L(v, q) = J(v) + b(v, q) =1
2a(v, v) + b(v, q)− f(v) ,
that is, if and only if
L(u, p) = infv∈V
supq∈QL(v, q) . (13)
• The pressure p ∈ Q plays the role of a Lagrangemultiplier associated to the divergence-free constraint div u = 0 (here represented by the constraint b(v, q) = 0).
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 13/ 80

Generalized Stokes problem
Model: generalized Stokes problem
• posed in a bounded domain Ω ⊂ Rd
• endowed with specic boundary conditions
Given f ; nd (u, p) such that:αu− µ∆u+∇p = f , in Ω
div u = 0 , in Ω
u = g0 on ΓD , ν∂u
∂n− p n = g1 on ΓN
(14)
where α, ν are given positive constants; Γ0 and Γ1 are two subsets of ∂Ω such thatΓD ∩ ΓN = ∅, ΓD ∪ ΓN = ∂Ω and g0 and g1 are two given functions dened on∂Ω;
• describe the motion of an incompressible viscous ow at low Reynolds number;
• derive from an implicit time discretization of the Navier-Stokes equations, in whichcase α ≈ 1/∆t .
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 14/ 80

Generalized Stokes problem
• Consider the functional spaces
V = v ∈ H1(Ω) , v = 0 on ΓD , and Vg0 = v ∈ H1(Ω) , v = g0 on ΓD .
• Suppose that f ∈ L2(Ω), g0 = g0|ΓD ∈ H1(Ω) and g1 ∈ L2(ΓN).
• If problem (14) admits a solution (u, p) ∈ H1(Ω) × L2(Ω), then this solution issuch that u ∈ Vg0, p ∈ L2(Ω) and, for all v ∈ V :
∫
Ω(αuv + ν∇u · ∇v) dx−
∫
Ωpdiv v =
∫
Ωf v dx+
∫
ΓNg1 v ds ,
div u = 0(15)
Theorem 2 (uniqueness and existence). Suppose the previous hypothesis on ν ,α,f , g0
and g1 hold.Then, there exists a unique solution (u, v) ∈ Vg0 ×Q, if p ∈ Q = L2
0(Ω).
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 15/ 80

Section 2.2Finite element approximation

Discrete variational problem
• Weak formulation:
nd (u, p) ∈ V ×Q , such that for all (v, q) ∈ V ×Qa(u, v) + b(v, p) = (f, v) ,
b(u, q) = 0 ,
• Discrete weak formulation:
nd (uh, ph) ∈ Vh ×Qh , such that for all (vh, qh) ∈ Vh ×Qha(uh, vh) + b(vh, ph) = (f, vh) ,
b(uh, qh) = 0 ,
(16)
• Existence and uniqueness of a solution: need to choose suitable Vh and Qh, suchthat the discrete inf-sup condition holds:
∃β > 0 ; infqh∈Qhqh 6=0
supvh∈Vhvh 6=0
b(vh, qh)
‖vh‖ ‖qh‖≥ β . (17)
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 17/ 80

Discrete variational problem
• The compatibility condition (17) is essential to ensure the uniqueness of the solution;
• Practical criteria for nding stable pairs of nite element spaces have been pro-posed by various authors; nite element spaces Vh and Qh cannot be chosen inde-pendently;
• In some cases, the inf-sup condition may not hold: there exists a function qh ∈ Qh,such that b(vh, qh) = 0, for all vh ∈ Vh and we have
a(uh, vh) + b(vh, ph + qh) = a(uh, vh) + b(vh, ph) + b(vh, qh)︸ ︷︷ ︸=0
= (f, vh) .
if (uh, ph) is a solution, so is (uh, ph + qh). Such functions are called spuriouspressure modes and they usually yield numerical instabilities. The subspaces ofthese functions are called unstable or incompatible.
• The space Sh of spurious pressure modes is dened as
Sh = kerBt =ah ∈ Qh ,
∫
Ωqh div vh dx = 0 , ∀ vh ∈ Vh
,
and a necessary condition for the inf-sup to hold is to have
Sh = 0 .
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 18/ 80

Algebraic formulation
The discrete nite element problem is equivalent to a system of linear algebraicequations.
• Let ϕj ∈ Vh and φk ∈ Qh be the bases of the spaces Vh andQh. Then, we have
uh(x) =N∑
j=1
uj ϕj(x) , ph(x) =M∑
k=1
pk φk(x) , N = dimVh , M = dimQh .
• Test functions chosen as functions ϕj and φk in (16), leads to the algebraic system:AU +BtP = F
BU = 0or, in matrix form
(A Bt
B 0
)
︸ ︷︷ ︸S
(UP
)=
(F0
)(18)
where U = [uj] and P = [pk] and F = [fl] = [(f, ϕl)] = [∫Ω f ϕl]are vectors;
and
A ∈MN,N(R) = [aij] = [a(ϕj, ϕi)] =[∫
Ω∇ϕj · ∇ϕi dx
]
B ∈MM,N(R) = [bkm] = [b(ϕm, φk)] =[∫
Ωφk divϕm dx
]
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 19/ 80

Algebraic formulationProperties of the linear system:
• The linear system is indenite since the matrix S is block symmetric and indenite(has positive and negative real eigenvalues).
• The matrix A is non-singular since it is related to the coercive bilinear form a(·, ·),hence A−1 is dened.
• We can derive the dual problem, by formally eliminating the velocity variable:
(BA−1Bt)P = (BA−1)F (19)
Matrix BA−1Bt (positive denite) is the Schur complement with respect to P .
• Then we compute the velocity as
AU = F −Bt P . (20)
This operation corresponds to Gaussian elimination on the initial system.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 20/ 80

Algebraic formulation
Existence of a solution:
• System (19) has a unique solution P if R = BA−1Bt is non-singular (Bt non-singular).
• The kernel of matrix Bt coincide with the space Sh of spurious pressure modes:
kerBt = 0 . (21)
• The existence and uniqueness of P allows to conclude that under condition (21),there exists a unique vector U solution of system (20). Condition equivalent to theinf-sup condition.Proposition 1. The matrix S is non-singular iif there is no zero eigenvalue.
• A−1 is usually a dense matrix and can be expensive to compute.System (19) has to be resolved using iterative method (Uzawa, Schur complement).
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 21/ 80

Finite element spaces
Choice of suitable spaces
• Stokes equations are PDE of second order with respect to u and rst order withrespect to p.
• The rst obvious choice is to introduce a polynomial approximation space of degreek ≥ 1 for the space Vh and of degree k − 1 for the space Qh.
• In this respect, the simplest choice of nite element spaces one can imagine isto use a standard piecewise linear P1 approximation for velocity and a constantapproximation P0 for pressure dened on a triangulation Th.Since the velocity is piecewise ane on the elements, its divergence is constant.Hence, by testing the divergence against constants, the divergence-free condition iseasily strongly imposed on the discrete velocity eld.
• Better choices exist.. maybe not so obvious.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 22/ 80

Stable discretizations
1. P2/P0 and Crouzeix-Raviart mixed elements: stable
Vh = vh ∈ C0(Ω) ; vh|T ∈ P2 , ∀T ∈ Th , vh|∂Ω = 0 quadratic / velocityQh = qh ∈ L2
0(Ω) ; qh|T ∈ P0 , ∀T ∈ Th , piecewise constant / pressure
• The discrete divergence-free condition writes on any triangle T ∈ Th:∫
Tdiv uh dx =
∫
∂Tuh · nds = 0 ,
and can be interpreted as a mass conservation law on every element.
• Extension: Crouzeix-Raviart mixed element;introduce normal component of the velocity at the mid-edge nodes. On each sideof the triangle, the normal (resp. tangential) component of uh is quadratic (resp.ane).
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 23/ 80

Stable discretizations
2. P2/P1 Hood-Taylor element: stable
3.3 Finite element approximation of the Stokes equations 79
The quadrilateral element Q2/Q1 enjoys the same properties as the Hood-Taylor triangular element. We have then
Corollary 3.6. Suppose the solution (u, p) of the Stokes problem is such thatu 2 H3() \ H1
0 () and p 2 H2() \ L20(). Then, the solution (uh, ph) of
the discrete Galerkin problem on the previous approximation spaces satisfiesthe a priori estimate
ku uhkH1() + kp phkL2() c h2 (kukH3() + kpkH2()) .
[stable]
3.3.3.6 P1b/P1 element
Finally, we explore a last example of finite element approximation spaces forsolving the Stokes problem. We have seen that the P1/P1 element does notsatisfy the inf-sup condition because the space of degrees of freedom for thevelocity is not suciently rich compared o the pressure space. To overcomethis problem, [CR73] and [ABF84] have cleverly proposed to enrich the ve-locity space with one additional degree of freedom at the triangle barycenter.In each triangle, a bubble function (i.e., a shape function vanishing on @T )is defined
b 2 H10 (T ) , 0 b 1 , b(G) = 1 ,
where G denotes the barycenter of T . The velocity and pressure spaces canthen be defined as
Vh = vh 2 C0() ; vh|T 2 P , 8T 2 Th , vh|@ = 0Qh = qh 2 L2
0() \ C0() ; qh|T 2 P1 , 8T 2 Th ,
where, using the barycentric coordinates i of T ,
P(T ) = P1(T ) span(123) ,
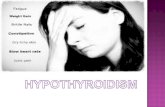
Fig. 3.4 Inf-sup condition satisfied on triangles for continuous velocity P1b and discontin-
uous pressure spaces P0 (left) and for quadratic velocity P2 and ane pressure P1 spaces(right), in two dimensions of space.
Page: 79 job: fluids macro: svmono.cls date/time: 3-Jun-2013/5:00
Finite elements for the Stokes problem 81
Fig. 12. Some stable elements belonging to the Hood–Taylor family
Vh = vh ∈ C0(Ω) ; vh|T ∈ P2 , ∀T ∈ Th , vh|∂Ω = 0 quadratic / velocityQh = qh ∈ L2
0(Ω) ∩ C0(Ω) ; qh|T ∈ P1 , ∀T ∈ Th piecewise ane / pressure
• Suppose that every triangle in Th has no more than one edge on ∂Ω. Then, thereexists a constant c > 0 such that
supvh∈Vh
∫
Ωqh div vh
‖vh‖H1(Ω)≥ c
∑
T∈Thh2(T ) |qh|2H1(T )
1/2
.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 24/ 80

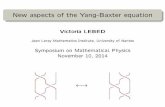
P2/P1 Hood-Taylor element• In element E, the basis functions ϕi of Vh are dened by:
ϕ1(x, y) =(
1−x
h−y
h
)(1−
x
2h−
y
2h
)
ϕ2(x, y) =x
2h
(x
h− 1
)ϕ3(x, y) =
y
2h
(y
h− 1
)
ϕ4(x, y) =x
h
(2−
x
h−y
h
)ϕ6(x, y) =
y
h
(2−
x
h−y
h
)
ϕ5(x, y) =xy
h2
and are such that ϕi(xj, yj) = δij
Fachbereich 03Mathematik/Informatik
' ( , ) = ( )( ),
' ( , ) = ( ),
' ( , ) = ( ),
' ( , ) = ( ),
' ( , ) = ,
' ( , ) = ( ).
' ( , ) =
( , ) = ,
( , ) = ,
( , ) = .
• The basic functions φi of Qh are dened by:
φ1(x, y) = 1−x
2h−
y
2hφ2(x, y) =
x
2hφ3(x, y) =
y
2h
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 25/ 80

Stable discretizations3. P1b/P1 element stable
• In each triangle T , a bubble function is dened at thebarycenter
b ∈ H10(T ) , 0 ≤ b ≤ 1 , b(G) = 1 ,
3.3 Finite element approximation of the Stokes equations 79
The quadrilateral element Q2/Q1 enjoys the same properties as the Hood-Taylor triangular element. We have then
Corollary 3.6. Suppose the solution (u, p) of the Stokes problem is such thatu 2 H3() \ H1
0 () and p 2 H2() \ L20(). Then, the solution (uh, ph) of
the discrete Galerkin problem on the previous approximation spaces satisfiesthe a priori estimate
ku uhkH1() + kp phkL2() c h2 (kukH3() + kpkH2()) .
[stable]
3.3.3.6 P1b/P1 element
Finally, we explore a last example of finite element approximation spaces forsolving the Stokes problem. We have seen that the P1/P1 element does notsatisfy the inf-sup condition because the space of degrees of freedom for thevelocity is not suciently rich compared o the pressure space. To overcomethis problem, [CR73] and [ABF84] have cleverly proposed to enrich the ve-locity space with one additional degree of freedom at the triangle barycenter.In each triangle, a bubble function (i.e., a shape function vanishing on @T )is defined
b 2 H10 (T ) , 0 b 1 , b(G) = 1 ,
where G denotes the barycenter of T . The velocity and pressure spaces canthen be defined as
Vh = vh 2 C0() ; vh|T 2 P , 8T 2 Th , vh|@ = 0Qh = qh 2 L2
0() \ C0() ; qh|T 2 P1 , 8T 2 Th ,
where, using the barycentric coordinates i of T ,
P(T ) = P1(T ) span(123) ,
Fig. 3.4 Inf-sup condition satisfied on triangles for continuous velocity P1b and discontin-
uous pressure spaces P0 (left) and for quadratic velocity P2 and ane pressure P1 spaces(right), in two dimensions of space.
Page: 79 job: fluids macro: svmono.cls date/time: 3-Jun-2013/5:00
Vh = vh ∈ C0(Ω) ; vh|T ∈ P , ∀T ∈ Th , vh|∂Ω = 0 pcw. ane+ / velocityQh = qh ∈ L2
0(Ω) ∩ C0(Ω) ; qh|T ∈ P1 , ∀T ∈ Th , piecewise ane / pressure
where, using the barycentric coordinates λi of T ,
P(T ) = P1(T )⊕ span(λ1λ2λ3) ,
• Lemma 3. If the triangulation Th is regular, there exists a constant β such that thefollowing estimate holds independently of h (the discretization parameter):
infqh∈Qhqh 6=0
supvh∈Vhvh 6=0
b(vh, qh)
‖vh‖H1(Ω) ‖qh‖L2(Ω)≥ β .
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 26/ 80

Unstable discretizations4. P1/P0 element: unstable
Vh = vh ∈ C0(Ω) ; vh|T ∈ P1 , ∀T ∈ Th , vh|∂Ω = 0 piecewise ane / velocityQh = qh ∈ L2
0(Ω) ; qh|T ∈ P0 , ∀T ∈ Th piecewise constant / pressure
• simplicity (obvious choice) but numerical locking
• this obvious choice does not satisfy the inf-sup condition.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 27/ 80

Unstable discretizations
• Consider Ω = [0,1] × (0,1] covered by a triangulation pictured below (N × N
squares splitted into two triangles each): dim(Vh) = 2 (N − 1)2 < dim(Qh) =2N2;the divergence matrix B has more rows than columns and (BU = 0)⇒ (U = 0).
+1 +1
+1+1
+1 +1
+1+11 1
11
1
1 1
1
• More generally, Euler’s relations give the identity: 2 = 2Nv+Ne−Nt and we knowthat dim(Vh) = 2Nv and dim(Qh) = Nt − 1. The rank-nullity theorem writes
dim(im(Bth)) + dim(ker(Bth)) = dim(Qh)
⇒ dim(ker(Bth)) = Nt − 1− 2Nv︸ ︷︷ ︸Ne−3
≥ Nt − 1− dim(Vh)
where Bh ∈ L(Vh, Qh); 〈Bhvh, qh〉 = b(vh, qh) for all vh ∈ Vh and qh ∈ Qh. Hence,there is a least Ne − 3 spurious pressure modes.The dimension of space Qh is too large: locking phenomenon.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 28/ 80

Stabilization procedures
Elimination of spurious modes
• Equal degree interpolation for the velocity and the pressure do not usually satisfythe discrete inf-sup condition and are considered unstable.
• The coercivity property may not be inherited on the approximation subspaces andthe conformity of these spaces is not sucient to ensure the stability of the discreteproblem.
• A stabilization technique can be used to remove the spurious modes in the nitedimensional problem.These techniques are usually appreciated by engineers since they allow to use un-stable yet simple nite elements to resolve the Stokes equations.Furthermore, stabilization is also convenient in a parallel (or multigrid) context.
• We have already seen a stabilization technique with the P1/P1 element, by addingbubbles to the velocity space leading to dene the P1b/P1 mini-element.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 29/ 80

Stabilization procedures
Least-squares formulation of the Stokes problem
• Stabilization methods involve an alteration of the discrete incompressibility condi-tion in such a way that the discrete inf-sup condition is automatically satised forany choice of the discrete spaces Vh ⊂ V and Qh ⊂ Q.
• We consider only piecewise linear nite elements.
• Let introduce the spaceW = H10(Ω)× L2
0(Ω). The mixed formulation writes:
Find (u, p) ∈W ; such that for all (v, q) ∈W , A(u, p; v, q) = F (v, q) ,
where we have set the functionalsA(u, p; v, q) = a(u, v) + b(v, p)− b(u, q)
= (∇u,∇v)− (div v, p)− (div u, q) = F (v, q)
and F (v, q) = (f, v) .
For f ∈ L2(Ω) there exists a unique solution (u, p).
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 30/ 80

Least-squares formulation
Discrete Galerkin formulation
• Let consider the nite element spaces Vh ⊂ H10(Ω) and Qh ⊂ L2
0(Ω).We setWh = Vh ×Qh;
• The Galerkin approximation of the problem is to nd (uh, ph) ∈Wh such that
A(uh, ph; vh, qh) = (fh, vh) , for all (vh, qh) ∈Wh , (22)
And we know that if the nite element spaces satisfy the discrete inf-sup condition
infq∈Qhq 6=0
supv∈Vhv 6=0
(div v, q)
‖v‖H1(Ω)‖q‖L2(Ω)≥ β > 0 ,
then (uh, ph) is the unique solution of the weak formulation.
• Suppose the domain Ω is covered by an ane mesh Th.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 31/ 80

Least-squares formulation
A stabilized variational formulation
• Dene a modied bilinear form Ah : Wh×Wh → R and a modied functional Fh:
Ah(uh, ph; vh, qh) = a(uh, vh) + b(vh, qh)− b(uh, qh)
+ δ∑
T∈Thh2T (−∆uh +∇ph,−∆uh +∇ph)T , (23)
Fh(vh, qh) = (f, vh)− δ∑
T∈Thh2T (f,−∆vh +∇ph)T , (24)
for a positive parameter δ suitably chosen.
• The Galerkin least-squares (GaLS) method is to nd (uh, ph) ∈Wh such that
Ah(uh, ph; vh, qh) = Fh(vh, qh) , for all (vh, qh) ∈Wh . (25)
• This is a strongly consistent approximation of Stokes the problem (1).
• If δ = 0, the GaLS method reduces to the Galerkin approximation. The additionalterm depends on the residual of the (discrete) momentum equation and vanishesfor the exact solution (u, p).
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 32/ 80

Least-squares formulation
• nd (uh, ph) ∈Wh such that
Ah(uh, ph; vh, qh) = Fh(vh, qh) , for all (vh, qh) ∈Wh . (26)
• Notice that this formulation leads to the identity
Ah(uh, ph;uh, ph) = ‖∇uh‖2L2(Ω) + δ∑
T∈Thh2T‖∇ph‖
2L2(T ) ,
and observe that the kernel of the bilinear form Ah is reduced to the null functionand thus there exists a unique solution to this problem.
Lemma 4. The solution (uh, ph) ∈Wh to the stabilized Galerkin problem satises
‖u− uh‖H1(Ω) +
δ
∑
T∈Thh2T‖∇p−∇ph‖
2L2(T )
1/2
≤ C h ,
where C is a constant independent of h.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 33/ 80

Least-squares formulation
• Let now ϕj ∈ Vh and φ ∈ QH be the bases for the spaces Vh and Qh, respec-tively. The matrix form of the stabilized Galerkin formulation becomes
(A Bt
B −C
)(UP
)=
(FG
),
where
C = [ckm] with ckm = δ∑
K∫Th
h2T
∫
T∇φm · ∇φk dx ,
and the components of the right-hand side G
G = [gl] with gl = −δ∑
K∫Th
h2T
∫
Tf div φl dx .
As with the "classical" variational formulation, we can formally eliminate the velocityvariable (since A−1 is well dened) and write
(BA−1Bt + C)P = BA−1F −G .
The matrix R = BA−1Bt + C is non-singular and C is a positive denite matrix.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 34/ 80

Solution methods for the Stokes system
Algebraic system
• The weak formulation equation is equivalent to a system of linear algebraic equa-tions (18) for the components of vectors U = [uj] and P = [pk] with
uh(x) =N∑
j=1
uj ϕj(x) , and ph(x) =M∑
k=1
pk φk(x) ,
where N = dim(Vh) andM = dim(Qh);
• The classical matrix formulation of the Stokes problem is:
K =
(A Bt
B 0
)(UP
)=
(F0
), (27)
where A is a regular matrix corresponding to the discretization of the Laplace op-erator for Dirichlet boundary conditions, often called the stiness matrix; B is thegradient matrix associated with the divergence matrix Bt.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 35/ 80

Resolution of the saddle-point problem
• The matrix of the linear system (27) is indenite (neither positive nor negative).However, the Galerkin matrix is symmetric, because the continuous Stokes operatoris self-adjoint.
• The Silvester law of inertia applied to the decomposition of the matrix
K =
(A Bt
B 0
)=
(I 0
BA−1 I
)(A 00 −BA−1Bt
)(I A−1Bt
0 I
)
shows that the number of positive and negative eigenvalues of thematrixK coincidewith the one of the second factor. Hence,K hasN positive eigenvalues and at leastM − 1 negative eigenvalues, where N (resp. M ) is the total number of degrees offreedom for the velocity (resp. the pressure).
• This system can be replaced by an equivalent system:
K =
(A Bt
−B 0
)
where the matrix K is now positive denite (all eigenvalues have positive real part),but no longer symmetric.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 36/ 80

Resolution of the saddle-point problem
Numerical considerations
• Solving this system using a direct method (i.e., elimination) may be acceptable forsmall systems (n < 104, where n is the size of the system).
• In this case, the pivoting must be organized with row exchanges to avoid small pivots(since the matrix is indenite).
• For large systems however, a direct method requires too much computational re-sources and memory (O(n3) and O(n4)). But, iterative methods cannot be chosenarbitrarily since many of them require a positive denite matrix. This feature pre-cludes Gauss-Seidel, Jacobi or gradient-based techniques.
• Several other techniques can be used to solve this system, that take advantage ofthe structure of the system.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 37/ 80

Resolution of the saddle-point problem
1. The penalty method
• Consists in introducing a perturbation into the original system (5) to penalize thedivergence-free constraint:
a(uε, v) + b(v, pε) = (f, v), for all v ∈ V
b(uε, q)− ε∫
Ωpεq dx = 0 , for all q ∈ Q
(28)
where ε > 0 is a small perturbation coecient.
• The error introduced by this technique is O(ε).Proposition 2. Let (u, p) (resp. (uε, pε)) denote the solution of the initial Stokessystem (5) (resp. perturbed system (28)). We have the following error estimate
αβ‖u− uε‖V + αβ2‖p− pε‖Q ≤ c ε ‖p‖Q .
where α > 0 is the coercivity constant associated with the bilinear form a(·, ·) andβ > 0 is the inf-sup constant.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 38/ 80

Resolution of the saddle-point problem
• The matrix form of the penalized problem becomes(A Bt
B −εMQ
) (UεPε
)=
(F0
)or equivalently
AUε +Bt Pε = F
B Uε − εMQPε = 0(29)
• Notice that themass matrixMQ ∈MM×M(R) is invertible (symmetric and positivedenite).
• By eliminating the pressure Pε from these equations, we obtain(A+
1
εBt(MQ)−1B
)Uε = F .
And once the velocity Uε has been computed by solving this equation, the pressurePε can be easily obtained by solving the equation
Pε =1
ε(MQ)−1BUε .
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 39/ 80

Resolution of the saddle-point problem
• Notice that this penalization method requires computing the inverse of the matrixMQ. Eciency is directly related to the computational eort required to compute(MQ)−1.(For discontinuous pressure approximations (P0 or Q0 Lagrange FE), MQ can be inverted element-wise.)
• For small values of ε, the system (29) is ill-conditioned ⇒ convergence issue foriterative methods.
• A solution consists in considering the system(A Bt
B −ε I
) (UεPε
)=
(F0
)or equivalently
AUε +Bt Pε = F
B Uε − εIPε = 0(30)
and likewise to eliminate the pressure from the equations(A+
1
εBtB
)Uε = F . (31)
It can be shown that equation (31) is equivalent to the following equation
(∇uh,∇vh) +1
ε
M∑
i=1
(div uh, qi)(div vh, qi) = (f, vh) , ∀uh, vh ∈ Vh .
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 40/ 80

Resolution of the saddle-point problem2. The augmented Lagrangian method: introduced for the solution of minimization problems with constraints.
• Combines penalty and Lagrange multipliers techniques.
• Consider the Lagrangian functional L ∈ C∞(H10(Ω)×L2(Ω)) associated with the
Stokes problem
L(v, q) =1
2a(v, v) + b(v, q)− f(v) =
1
2
∫
Ω|∇v|2 dx−
∫
Ωq div v dx− f(v) ,
With r > 0, we associate with L the augmented Lagrangian functional Lr denedby
Lr(v, q) = L+r
2
∫
Ω|div v|2 dx , for all (v, q) ∈ H1(Ω)× L2(Ω) .
And we observe that
L(v, q) ≤ Lr(v, q) , ∀ (v, q) ∈ H1(Ω)× L2(Ω)
L(v, q) = Lr(v, q) =1
2
∫
Ω|∇v|2 dx− f(v)
= J(v) , ∀ v ∈ H2(Ω); div v = 0 , ∀ q ∈ L2(Ω) .
(32)
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 41/ 80

Resolution of the saddle-point problem
• Theorem 3. The functionalsL andLr have the same saddle-points over V ×L2(Ω).
• A simple iterative procedure can be employed to remove penalty errors:1. Assume Pε,0 is an arbitrary initial guess for the pressure.2. Knowing Pε,k, we compute Pε,k+1 from:
(A Bt
B −εMQ
)=
(Uε,k+1Pε,k+1
)=
(F
−εMQPε,k
),
3. IfMQ can be inverted eciently, we can write the previous equations as:
(A+
1
εBt(MQ)−1B
)Uε,k = F −BtPε,k ,
MQPε,k+1 = MQPε,k +1
εBUε,k .
• Convergence can be proved for any ε > 0 and practically, setting ε to a small value(ε ≤ 10−6) allows the previous sequence to converge in a few iterations.
• This iterative procedure is a special case of the Uzawa algorithm.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 42/ 80

Resolution of the saddle-point problem
3. The Uzawa method - Schur complement
• Consider the saddle-point problem:nd (u, p) ∈ X ×M such thatL(u, q) ≤ L(u, p) ≤ L(v, p) , ∀(v, q) ∈ X ×M ,
with
L(v, q) =1
2a(u, v) + b(v, q)− f(v) .
• The algorithm tfor solving this problem is a gradient method applied to the mini-mization of the dual functional.
• Assume that L is dierentiable with respect to q
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 43/ 80

Resolution of the saddle-point problem
• The Uzawa algorithm consists in 3 steps:(a) given p0 ∈M(b) for k ≥ 0, pk known, compute uk and pk+1 in two steps:(b.1) compute velocity uk associated with pk:
uk ∈ X, solving L(uk, pk) ≤ L(v, pk) , ∀v ∈ X ,
(b.2) compute new pressure eld pk+1:
pk+1 = ΠM(pk + ρ∇pL(uk, pk)) ,
where ρ > 0 andΠM denotes the orthogonal projection operator fromQ ontoM .
• Convergence is proved for any ρ suciently small.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 44/ 80

Resolution of the saddle-point problem
• In matrix form, Uzawa’s method consists in eliminating the velocity U , thus yielding
BA−1Bt P = BA−1 F .
• The Uzawa matrix Uz = BA−1Bt is given in implicit form since A−1 is a densematrix and the computational cost of inverting A is too large in practice.
• Suitable iterative methods shall be used to compute it. Uzawa algorithm becomes:(a) given P0
(b) for k = 0,1,2, . . .
(b.1) solve AUk = F −BtPk(b.2) set Pk+1 = Pk + ρBUk
• Let Rk = −BUk denote the residual, then we have
Rk = −BA−1(F −BtPk) = BA−1Bt(Pk − P ) ,
and thus it is easy to show that
Pk+1 − Pk = −ρRk+1 = ρBA−1Bt(P − Pk) = ρUz(P − Pk) .
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 45/ 80

Resolution of the saddle-point problem
• Remarks on Uzawa algorithm
Uzawa algorithm is equivalent to a gradient method with xed time step ρ.
A speed-up can be obtained if a conjugate gradient method is used instead ofthe gradient method.
Preconditioning: The iterative approaches may be very expensive, in particular because they aresearching for the exact solution of the Laplace equation.
To speed up the process we can introduce a symmetric positive denite oper-ator C close to Uz:
Pk+1 = Pk − ρC−1BUk .
C−1 must not be expensive to compute. Since only step (b) is modied, the convergence properties of the method arepreserved. The rate of convergence is still very dependent on the choice of C .
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 46/ 80

Section 2.3Unsteady Stokes problem

The unsteady Stokes problem
Model: unsteady Stokes problem
• we study now the unsteady motion of a viscous incompressible uid of constantdensity conned in a bounded domain Ωt ⊂ Rd, subjected to a density of volumeforce per mass unit f , for t ∈ [0, T ];
• described by the following set of equations:
Given f ; nd (u, p) such that:∂u
∂t− ν∆u+
1
ρ∇p = f , in Ωt × (0, T )
div u = 0 , in Ωt × (0, T )
, (33)
• endowed with the homogeneous Dirichlet boundary condition and the initial con-dition (i.e. a given velocity at time t = 0):
u = 0 , on ∂Ωt × (0, T ) ,
u(x,0) = u0(x) , with div u0 = 0 in Ωt .(34)
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 48/ 80

Variational formulation
Equations (33) and (34) can be recast in a weak form using a mixed formulation.
• Consider the functional spaces V = H10(Ωt) and Q = L2
0(Ωt).
• By multiplying the rst equation by a test function v ∈ V and by integrating overΩt, we get for almost every t ∈ (0, T ):
∫
Ωt
∂u
∂t· v dx−
∫
Ωt
ν∆u · v dx+1
ρ
∫
Ωt
∇p · v dx =∫
Ωt
f · v dx .
Using Green’s formula we can rewrite the partial terms and reformulate the previousequation as follows, for a.e. t ∈ (0, T ):∫
Ωt
∂u
∂t·v dx+
∫
Ωt
ν∇u ·∇v dx−1
ρ
∫
Ωt
pdiv v dx =∫
Ωt
f ·v dx , ∀ v ∈ V (35)
• Likewise, we introduce the bilinear forms a(·, ·) : (u, v) ∈ V × V → a(u, v) ∈ Rand b(·, ·) : (u, q) ∈ V ×Q→ b(u, q) ∈ R, respectively dened as:
a(u, v) =∫
Ωt
ν∇u · ∇v dx =∫
Ων
d∑
i=1
∇ui · ∇vi dx , (36)
b(u, q) = −∫
Ωt
div u q dx . (37)
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 49/ 80

Variational formulation
• To simplify, let assume the constant density ρ = 1.
• The weak form reads as follows:for given f ∈ C0([0, T ];L2(Ωt)) and u0 ∈ V ,
nd a pair (u, p) ∈ V ×Q such that for a.e. t ∈ (0, T )
〈∂tu, v〉+ a(u, v) + b(v, p) = (f, v) , for all v ∈ V ,b(u, q) = 0 , for all q ∈ Q ,u(·, t = 0) = u0 ,
(38)
• Here, we introduced the expression for almost every t ∈ (0, T ) to avoid any oc-curence of a temporal discrepancy like a step function in the velocity eld.
• We have the result:Proposition 3. Given f ∈ C0([0, T ];L2(Ωt)) and u0 ∈ V , there exists a uniquesolution to problem (38) for every T > 0.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 50/ 80

The unsteady Stokes problem
• In order to avoid having an arbitrary value of the mean value of the pressure, weconsider the functional spaces
H = v ∈ L2(Ωt) ; div v = 0 , v · n = 0 on ∂Ωt
H1∫=0(Ωt) = q ∈ H1(Ωt) ;
∫
Ωt
q = 0 ,
V = v ∈ H10(Ωt) ; div v = 0 ,
(and observe that V is dense in H and there is a continuous injection of V into H .)
• For any u ∈ L2(Ωt), there exists a unique pair u ∈ H and φ ∈ H1∫=0
(Ωt) suchthat
u+∇φ = u , in Ωt ,
div u = 0 ,
u · n = 0 , on ∂Ωt .
(39)
Proposition 4. The functional space L2(Ωt) can be decomposed as follows:
L2(Ωt) = H ⊕∇(H1∫=0(Ωt)) . (40)
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 51/ 80

Finite element approximation
• In the Stokes problem (38), the space and time variables have dierent meaningsand contribute dierently to the phenomenon. This allows to proceed in dierentways for the time and the space approximations.
• We introduce a Galerkin approximation for the space discretization the same waywe did for the Stokes problem.This means that we have to pay attention to the choice of the approximation spacesto make sure that they lead to stable discretizations of the problem, i.e. that thediscrete LBB inf-sup condition is satised.
• Then, for the resulting system of coupled ordinary dierential equations, where thetime is the independent variable, we consider a suitable approximation in time.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 52/ 80

Space approximation
• Let Vh ⊂ V and Qh ⊂ Q be two families of nite-dimensional vector spacesdepending on a scalar parameter h > 0, and let u0h ∈ Vh be an approximation ofu0.
• Vh and Qh are compatible subspaces that approach V and Q as h→ 0.
• Problem (38) can then be replaced by the following Galerkin approximation:
nd uh ∈ C1([0, T ];Vh), ph ∈ C0([0, T ];Qh) s.t. ∀t ∈ [0, T ]
〈∂tuh, vh〉+ a(uh, vh) + b(vh, ph) = (f, vh) , for all vh ∈ Vh ,b(uh, qh) = 0 , for all qh ∈ Qh ,uh(·, t = 0) = u0h ,
(41)
which is called a semi-discrete scheme.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 53/ 80

Analysis of the semi-discrete scheme
• The spaces Vh ⊂ H10(Ωt) andQh ⊂ L2
0(Ωt) must satisfy a compatibility condition:there exists a constant β > 0 (independent of the parameter h) such that:
infqh∈Qh
supvh∈Vh
b(vh, qh)
‖vh‖H1(Ωt)‖qh‖L2(Ωt)
≥ β (42)
• Furthermore, let assume that for all v ∈ V and q ∈ Q we have
infvh∈Vh
‖v − vh‖H1(Ωt)+ inf
qh∈Qh‖q − qh‖L2(Ωt)
= O(h) . (43)
• We have the following error estimate:Proposition 5. Under the previous hypothesis, the solution (uh, ph) of the problem(41) is such that:
‖u(t)− uh(t)‖L2(Ωt)≤ ‖u− u0h‖L2(Ωt)
e−c1t/2 + c2(u, p)h2 ,(
1
T
∫ T0‖u(t)− uh(t)‖H1(Ωt)
+ ‖p(t)− ph(t)‖L2(Ωt)
)1/2
≤c3√T‖u− u0h‖L2(Ωt)
+ c4(u, p)h , (44)
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 54/ 80

Time discretization
Actually, the approximate problem (41) can be discretized in time using techniquesdesigned for parabolic problems.
• Let Ωt be a domain of Rd. We consider the following parabolic problem:
∂u
∂t+ Lu = f , ∀x ∈ Ωt , t ≥ 0 ,
u(x, t) = 0 , ∀x ∈ ∂Ωt , t > 0 ,
u(x,0) = u0(x) , ∀x ∈ Ωt ,
(45)
where f = f(x, t) is a given function, L = L(x) is an abstract elliptic operatoracting on u = u(x, t), the unknown.
• In order to nd a weak formulation of problem (45), we multiply for each t > 0 theequation by a test function v = v(x) taken in the functional space V = H1
0(Ω),and integrate over Ωt:
∫
Ωt
∂tuv dx+ a(t;u(t), v) =∫
Ωt
f(t)v ds , ∀v ∈ V (46)
with u(0) = u0 and a(t; ·, ·) is the bilinear form asociated with the elliptic opera-tor L.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 55/ 80

Parabolic problems
• We introduce the following hypothesis:(i) the function t 7→ a(t;u, v) is measurable, ∀u, v ∈ V ;
(ii) the bilinear form a(t; ·, ·) is continuous, that is:there exists M such that |a(t;u, v)| ≤ M ‖u‖V ‖v‖V , for a.e. t > 0;
(iii) the form a(t; ·, ·) is weakly coercive, that is for a.e t > 0, for all u ∈ V , thereexists γ ≥ 0 , α > 0 such that a(t;u, u) ≥ α‖u‖2V − γ‖u‖
2L2(Ωt)
.
• Furthermore, we require here u0 ∈ L2(Ωt) and f ∈ L2(Ωt).Then, we have the following result.
Theorem 4 (J.L. Lions). Under the hypothesis (i)-(iii), the problem (46) admits aunique solution.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 56/ 80

Galerkin approximation of parabolic problems
• Consider an approximation space Vh ⊂ V and u0h an approximation of u0 in Vh.
• The Galerkin approximation of problem (46) reads:
for each t > 0 , nd uh(t) ∈ Vh such that:∫
Ωt
∂tuh(t) vh dx+ a(t;uh, vh) =∫
Ωt
f(t) vh dx , ∀vh ∈ Vh .(47)
• This problem is called a semi-discretization of (46) since the time variable t has notbeen discretized.
• The new problem is a system of coupled ordinary dierential equations.
• The Cauchy-Lipschitz theorem guarantees the existence and the uniqueness of thesolution uh(t) in C1([0, T ];Vh).
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 57/ 80

Galerkin approximation of parabolic problems
• We introduce a nite element basis (ϕj)1≤j≤N for the space Vh.
• The solution to (47) can be written as follows, for each t > 0:
uh(x, t) =N∑
j=1
uj(t)ϕj(x)
where the coecients uj(t) represent the unknowns of problem (47).
• We denote dtuj(t) the derivative of the function uj(t) with respect to time. Theprevious system can be reformulated as:
N∑
j=1
dtuj(t)∫
Ωt
ϕjϕi dx︸ ︷︷ ︸
mij
+N∑
j=1
a(ϕj, ϕi)︸ ︷︷ ︸aij
=∫
Ωt
f(t)ϕi dx︸ ︷︷ ︸
fi(t)
, i = 1,2, . . . , N .
• We dene the vector of unknowns u(t) = (ui(t))1≤i≤N in RN , the righ-hand sidevector f(t) = (fi(t))1≤i≤N , the mass matrixM = (mij)1≤i,j≤N and the stinessmatrix A(t) = (aij)1≤i,j≤N and the problem reads:
Mdtu(t) +A(t)u(t) = f(t) , t > 0 .
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 58/ 80

Time-integration schemes
• Numerous time-integration methods have been proposed.Let δt > 0 be a scalar value representing the time step, δt = tn+1− tn and denoteunh the value of uh at time t
n.
• A classical method, the θ-scheme, approximates the time derivative dtu(tn+1) bythe dierential quotient 1
δt(un+1h − unh) and compute the sequence (u0
h, . . . , unh),
ujh ∈ Vh, depending on the real parameter θ ∈ [0,1] as:
1
δt(un+1h − unh, vh) + a(tn+1;un+1
θh , vh) = (fθ(tn+1), vh) , ∀vh ∈ Vh
where un+1θh = θun+1
h + (1− θ)un and fθ(tn+1) = θf(tn+1) + (1− θ)f(tn).
• In algebraic form, the θ-scheme reads:
M1
δt(un+1 − un) +A(θun+1 + (1− θ)un) = θfn+1 + (1− θ)fn .
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 59/ 80

Time-integration schemes
• The θ-scheme is known as the implicit Euler scheme for θ = 1 and writes:
1
δt(un+1h − unh, vh) + a(tn+1;un+1
h , vh) = (f(tn+1), vh) , ∀vh ∈ Vh
the implicit Crank-Nicolson scheme for θ = 1/2 and as the explicit Euler scheme for θ = 0.
• The BDF2 scheme (second-order backward nite dierence) is a two-step method:1
δt(3un+1
h − 4unh + un−1h , vh) + a(tn+1;un+1, vh) = (f(tn+1, vh) , ∀vh ∈ Vh .
• The fractional-step scheme consists in subdividing each time interval [tn, tn+1] intothree subintervals and then solve three systems.
• stability and consistency are important numerical issues when dealing with sti ini-tial value problems. The implicit Euler method is consistent at order one, while theCrank-Nicolson scheme is consistent at order two in space and time. For θ ≥ 1/2,the θ-scheme is unconditionally stable.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 60/ 80

Backward Euler scheme
• Unsteady Stokes problem (41) is solved by constructing a sequence (uh, ph)n≥0:1. solve (u0
h, vh) = (u0h, vh)L2(Ωt), for all vh ∈ Vh,
2. nd un+1h ∈ Vh and p
n+1h ∈ QH such that, for all vh ∈ Vh, qh ∈ Qh:
1
δt(un+1h − unh, vh) + a(un+1
h , vh) + b(vh, pn+1h ) = (f(tn+1), vh)
b(un+1h , qh) = 0 .
(48)
• At each time step, one has to resolve the following problem, for all vh ∈ Vh, qh ∈ Qh:
(un+1h , vh) + δt a(un+1, vh)
︸ ︷︷ ︸a(un+1
h ,vh)
+b(vh, δt pn+1h ) = (unh + δt f(tn+1), vh)
b(un+1, qh) = 0
a steady Stokes problem (no initial condition for the pressure is required).
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 61/ 80

Backward Euler scheme
• This discretization method is unconditionally stable and is rst-order accurate intime.
• It corresponds to the nite element space approximation of the strong steady for-mulation:
1
δt(un+1 − un)− ν∆un+1 +∇pn+1 = fn+1 ,
div un+1 = 0 ,(49)
in which (un, pn) represents an approximation of (u(x, nδt), p(x, nδt)).
• Equation (48) can be also obtained from the time discretization of the weak form(38).
• We have the commutative diagram:
Eqns.(33) −−−−−−−−−−−−−→time discretization
Eqns.(49)
weak form
yyweak form
Eqn.(38) −−−−−−−−−−−−−→time discretization
Eqn.(48)
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 62/ 80

Projection methodsTo solve the unsteady Stokes problem, we consider a Chorin-Temam projection scheme:
• At each time step, this approach involves 2 steps:1. a prediction step to determine a velocity eld that does not consider the pres-sure, and
2. a correction step to project this velocity eld onto the space of divergence-freefunctions taking into account a pressure variable, thanks to the decomposi-tion (40).
• Let un ∈ V ≈ u(·, tn). Set u0 = u0; then at every time step tn predict un+1:
(i)
1
δt(un+1 − un)−∆un+1 = fn+1 , in Ωt
un+1 = 0 , on ∂Ωt
(50)
Then, un+1 is projected onto the space of divergence-free functions by solving:
(ii)
un+1 +∇φn+1 = un+1 , on Ωt
div un+1 = 0 ,
un+1 · n = 0 , on ∂Ω .
to nd un+1 ∈ H and φn+1 ∈ H1∫=0
(Ωt).
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 63/ 80

Projection methods
• Actually, this projection step is equivalent to solving the following system:
(ii)
1
δt(un+1 − un+1) +∇pn+1 = 0 , on Ωt
div un+1 = 0 ,
un+1 · n = 0 , on ∂Ω .
(51)
Indeed, by multiplying the rst equation by 1/δt and adding it to (50), we obtain thefollowing expression:
1
δt(un+1 − un)−∆un+1 +∇(
1
δtφn+1) = fn+1 ,
that can be interpreted as an aproximation of the momentum equation, where1/δt φn+1 is considered as an approximation of the pressure term.Now, setting φn+1 = δt pn+1 leads to the previous system.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 64/ 80

Projection methods
Two theoretical results follow:
• Lemma 5 (Rannacher). If the solution (u, p) of problem (38) is suciently smoothin time and space, the solution of the fractional-step method (50)-(51) is such that:
suptn∈[0,T ]
(‖u(tn)− un‖L2(Ωt), ‖u(tn)− un‖L2(Ωt)
) ≤ c δt , (52)
suptn∈[0,T ]
(‖p(tn)− pn‖L2(Ωt), ‖u(tn)− un‖H1(Ωt)
) ≤ c (δt)1/2 . (53)
• Corollary 1. If the solution (u, p) of problem (38) is suciently smooth in time andspace, the solution of the fractional-step method (55)-(56) is such that:
suptn∈[0,T ]
(‖u(tn)− un‖L2(Ωt)
, ‖u(tn)− un‖L2(Ωt),
‖u(tn)− un‖H1(Ωt), ‖p(tn)− pn‖L2(Ωt)
)≤ c δt , (54)
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 65/ 80

Projection methods
• The numerical algorithm has been improved by modifying the computation of theintermediate velocity.
• The modied version reads:Set u0 = u0 and p0 = p|t=0 and solve at every time step tn the system:
(i)
1
δt(un+1 − un)−∆un+1 = fn+1 −∇pn , in Ωt
un+1 = 0 , on ∂Ωt
(55)
• and the projection stage is modied accordingly as follows:
(ii)
1
δt(un+1 − un+1) +∇(pn+1 − pn) = 0 , on Ωt
div un+1 = 0 ,
un+1 · n = 0 , on ∂Ω .
(56)
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 66/ 80

Finite element approximationThe FE approximation of the Chorin-Temam projection schemes is straightforward.
• Given the approximation spaces Vh and Qh, the problems to solve is:
Find un+1 in Vh such that for every vh ∈ Vh1
δt(un+1h − unh, vh) + a(un+1
h , vh) + b(vh, pn+1h − pnh) = (f(tn+1), vh)) ,
(57)
• and then the uncoupled pressure problem:
Find pn+1 in Qh such that for every qh ∈ Qh(∇(pn+1
h − pnh),∇qh) = −1
δt(div un+1
h , qh) .(58)
• These two problems are two coercive problems that are not required to satisfy theinf-sup condition when solved one after another. However, the inf-sup conditionmust be satised for the projection scheme to be convergent.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 67/ 80

Finite element approximation
• We can easily recast the sub-problems (55)-(56) as follows:∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
(i)1
δt(un+1 − un)−∆un+1 +∇pn = fn+1 , un+1|∂Ωt
= 0
(ii)
1
δt(un+1 − un+1) +∇φ = 0
−∆φ = −1
δtdiv un+1
div un+1 = 0 , un+1 · n|∂Ω = 0
(iii) pn+1 = pn + φ
(59)
• For the prediction step, the boundary condition un+1 = 0 is considered and it isupdated to un+1 · n = ∇φ · n = 0 on ∂Ωt in the second step.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 68/ 80

Finite element approximation
• When discretized using a nite element method, we obtain an algebraic system ofthe form:
∣∣∣∣∣∣∣∣∣∣∣∣
(i)1
δt(MUn+1 −MUn) +AUn+1 +BtPn = Fn+1
(ii) LΦ =1
δtBUn+1 , MUn+1 = MUn+1 − δtBtΦ
(iii) Pn+1 = Pn + Φ
(60)
whereM represents the velocity mass matrix, andA,B andL are the matrices asso-ciated with the velocity Laplacian, the pressure gradient and the pressure Laplacianoperators, respectively.
• A BDF2 scheme has been proposed to approximate the time-derivative:1
2δt(3un+1 − 4un + un−1)−∆un+1 = fn+1 −∇pn , un+1|∂Ωt
= 0 (61)
and
3
2δt(un+1 − un+1) +∇(pn+1 − pn) = 0 , in Ωt
div un+1 = 0 ,
un+1 · n = 0 , on ∂Ωt
(62)
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 69/ 80

Section 2.4the Finite Element Method

Fundamentals of finite element method
The Finite Element Method (FEM) is a generic approach based on the approximation ofcontinuous functions using piecewise polynomial basis functions.
• Domain Ω is covered by a triangulation Th composed of nite elements
Ω =⋃
K∈ThK
Definition 1. A triangulation Th of the domain Ω is a decomposition of the domainΩ in a nite number of simplicesK , obtained from a so-called reference element Kand from one to one (bijective) transformations TK such that
K = TK(K) .
• The triangulation is said to be conforming, when for every couple (Ki,Kj)i 6=j ofsimplices in Th, the intersection Ki ∩Kj is either empty, or a vertex in dimension 1; either empty, or a common vertex or an edge in dimension 2; either empty, or a common vertex or an edge or a face in dimension 3.
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 71/ 80

Definitions and terminology
• The parameter h represents the grain of the triangulation Th
h = maxK∈Th
hK with hK = diam(K) .
Definition 2. In an isotropic triangulation, all triangles shall satisfy a uniform esti-mate, for a scalar constant C , of the form
σK =hKρK≤ C .
• The nite element subspace Vh is composed of piecewise-polynomial functions;
Vh = vh ∈ Ck(Ω) ; vh|K ∈ Pk , ∀K ∈ Th .
• Any function of Vh is uniquely determined by a nite number of degrees of freedom(values of the function at mesh nodes).
• Each basis function ϕi with compact support is associated with one degree of free-dom
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 72/ 80

Lagrange finite element
• A nite element is locally dened by a set (K,PK,ΣK), where:(i) K is a non-empty compact and connected set,(ii) PK is a vector space of polynomials of dimensionM ,(iii) Σk is a set ofM independent linear forms ϕi dened on Pk.
• The setΣK is said to be unisolvent onPk if for each set ofM scalar values (αi)1≤i≤M ,there exists a unique p ∈ PK such that
∀1 ≤ i ≤M , ϕi(p) = αi .
• If ΣK is unisolvent on PK , the triple (K,PK,ΣK) is a Lagrange nite element.
• We consider the basis pii=1,...,M of PK dened by ∀1 ≤ j ≤ M , ϕj(pi) = δi,j ,and every p ∈ PK is written as:
p =M∑
i=1
ϕi(p)pi .
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 73/ 80

Finite elements
• Σk is called the set of the degrees of freedom of the nite element (K,PK,ΣK).
• We consider the interpolation operator ΠK : if v belongs to the denition set of thelinear forms of ΣK ,
ΠK(v) =M∑
i=1
ϕi(v)pi .
• Similarly, ΠK(v) is the unique element of PK such that
∀1 ≤ i ≤M, ϕi(ΠK(v)) = ϕi(v) .
• ΠK(v) interpolates v on PK and we have
∀ p ∈ PK , ΠK(p) = p .
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 74/ 80

Polynomial spaces
• We introduce the set Pk of the polynomials p with scalar coecients of Rd in R ofdegree less than or equal to k:
Pk =
p(x) =
∑
i1,...,id≥0i1+...id≤k
αi1,...,idxi11 . . . x
idd , αij ∈ R , x = (x1, . . . xd)
.
• It is easy to verify that Pk is a vector space of dimension:
dim(Pk) =k∑
l=0
(d+ l − 1
l
)=
(d+ kk
)=
k + 1 d = 11
2(k + 1)(k + 2) d = 2
1
6(k + 1)(k + 2)(k + 3) d = 3
• The notion of lattice Σk of a simplex K allows to dene a bijective mapping be-tween a space of polynomials Pk and a set of points (σj)1≤j≤Nk .
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 75/ 80

Triangular finite elements
• The nite element method for triangular Lagrange Pk elements involves the discretenite dimensional functional space:
V kh =v ∈ C0(Ω) , vh|Kj ∈ Pk , Kj ∈ Th
,
and its subspace:
V k0,h =vh ∈ V kh , vh = 0 on ∂Ω
.
• Lemma 6. The space V kh is a subspace of the space H1(Ω) of nite dimension cor-responding to the number of degrees of freedom. Furthermore, there exists a basis(ϕj)1≤j≤Ndof of V
kh dened by:
ϕi(aj) = δij , 1 ≤ i, j ≤ Ndof ,
such that every function vh ∈ V kh can be uniquely written as
vh(x) =
Ndof∑
i=1
vh(ai)ϕi(x) .
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 76/ 80

Triangular finite elementsThe reference nite element
• By convention, the vertices of the reference simplex K are given by a0 = (0, . . . ,0)
(origin) and the points ai = (0, . . . ,1, . . . ,0) ,.
• FK : Rd → Rd is the unique ane transformation that maps ai on ai for all i:
∀x ∈ Rd , x = FK(x) = a0 +BK x ,
where BK is a d× d matrix; column i is given by the coordinates of ai − a0.
• Since the simplex K is non-degenerated, BK is invertible and FK is a one-to-onemapping that maps K on K and we have:
|K| = |det(BK)| |K| =|det(BK)|
d!.
• We use the notation · in the reference element and we denote q any quantity ob-tained by transporting a quantity q using the transformation FK .
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 77/ 80

Triangular finite elements
• We denote:
x = F−1K (x) = B−1
K (x− a0) ⇔ x = FK(x) .
• For every function v dened on K , we dene v dened on K as:
v(x) = v FK(x) = v(FK(x)) ,
and for every function v dened on K , we write:
v(x) = v F−1K (x) = v(F−1
K (x)) .
• Similarly, if ψ is a linear form acting on the functions dened on K , we dene thetransported linear form ψ acting on the functions dened on K as:
ψ(v) = ψ(v) .
• The barycentric coordinates are preserved by the ane transformation FK :
λi(x) = λi(x) .
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 78/ 80

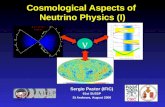
Triangular finite elements
a1
FKa2
a1a0
K
K
a0
a2
•
Proposition 6. We denote by ‖ · ‖ the Euclidean norm of Rd and its subordinatenorm. Hence, we have:
‖BK‖ ≤hKρK
, ‖B−1K ‖ ≤
hK
ρK, |det(BK)| =
|K||K|
.
• Transformation of the derivatives:
∇xv(x) = (BtK∇xv) FK(x) , ∇xv(x) = ((BtK)−1∇xv) F−1K (x) .
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 79/ 80

Triangular finite elements
• Triangle K of type (1) in R2: PK = P1, ΣK = f 7→ f(ai) ; 1 ≤ i ≤ 3ΣK is dened on C0(K). The basis functions are pi ∈ P1 and pi(aj) = δi,j , hence
pi = λi and ΠK(v) =3∑
i=1
v(ai)λi .
• Triangle K of type (2) in R2: PK = P2, ΣK = f 7→ f(ai) ∪ f 7→ f(aij)ΣK is dened on C0(K). card(ΣK) = 6 and dim(P2) = 6. The basis functionsare
pi = 2λi(λi −1
2), pij = 4λiλj,
ΠK(v) = 23∑
i=1
v(ai)λi(λi −1
2) + 4
∑
1≤i<j≤3
v(aij)λiλj .
Σ1 Σ3Σ2
Aspects théoriques et numériques pour les uides incompressibles M2 ANEDP, UPMC, 2019-2020 80/ 80