K05_Relativno_gibanje_cestice_PRIMJERI.pdf
7
Relativno gibanje: PRIMJERI Ž. Lozina: KINEMATIKA, FESB, 2011 1 Relativno gibanje čestice Primjer 1: Koliko ubrzanje čestice A opaža nepomični promatrač ako pomični promatrač u B, trenutno se gibajući brzinom v B =3i+2j i ubrzanjem a B =5i+3j mijenja orjentaciju (pravac) s Ω=2k, α= –k te pri tome opaža položaj r A/B =3i+2j, brzinu v A/B =i+j i ubrzanje a A/B =4i+2j čestice A? Rješenje: ( ) / / / / 2 A B AB AB AB AB B = + + × + × × + × a a a α r Ω Ω r Ω v Napomena: Vektori se mogu zapisati geometrijski ili matrično. Primjerice, vektore a i b zapisujemo: - geometrijski: a= a x i+ a y j+ a z k, b= b x i+ b y j+ b z k - matrično: a={ a x a y a z } T , x y z b b b = b Vektorski umnožak dva vektora a i b se također može se zapisati geometrijski ili matrično korištenjem spina vektora. Spin vektora a je kvadratna matrica koju označavamo s a % i koja ima komponente kako slijedi: 0 0 0 z y z x y x a a a a a a - = - - a % Sad je: ( ) ... x y z y z z y x y z a a a ab ab b b b = = = - + i j k c a×b i 0 0 ... 0 ... z y x y z z y z x y y x z a a b ab ab a a b a a b - - = = - = - c ab % Studentu je prepušteno da za vježbu dovrši gornje izraze. Usporedbom odgovarajućih komponenti utvrdi ekvivalentnost zapisa. Izraz za ubrzanje ( ) / / / / 2 A B AB AB AB AB B = + + × + × × + × a a a α r Ω Ω r Ω v matrično sada glasi:
-
Upload
david-mccarthy -
Category
Documents
-
view
219 -
download
2
Transcript of K05_Relativno_gibanje_cestice_PRIMJERI.pdf
-
Relativno gibanje: PRIMJERI
. Lozina: KINEMATIKA, FESB, 2011 1
Relativno gibanje estice
Primjer 1: Koliko ubrzanje estice A opaa nepomini promatra ako pomini promatra u B, trenutno se gibajui brzinom vB =3i+2j i ubrzanjem aB=5i+3j mijenja orjentaciju (pravac) s =2k, = k te pri tome opaa poloaj rA/B=3i+2j, brzinu vA/B=i+j i ubrzanje aA/B=4i+2j estice A?
Rjeenje: ( )/ / / /2A B A B A B A B A BB= + + + + a a a r r v Napomena: Vektori se mogu zapisati geometrijski ili matrino. Primjerice, vektore a i b zapisujemo:
- geometrijski: a= axi+ ayj+ azk, b= bxi+ byj+ bzk - matrino: a={ ax ay az}T,
x
y
z
bbb
=
b
Vektorski umnoak dva vektora a i b se takoer moe se zapisati geometrijski ili matrino koritenjem spina vektora. Spin vektora a je kvadratna matrica koju oznaavamo s a% i koja ima komponente kako slijedi:
00
0
z y
z x
y x
a a
a a
a a
=
a%
Sad je:
( ) ...x y z y z z yx y z
a a a a b a bb b b
= = = +
i j kc ab i
00 ...
0 ...
z y x y z z y
z x y
y x z
a a b a b a ba a ba a b
= = =
c ab%
Studentu je preputeno da za vjebu dovri gornje izraze. Usporedbom odgovarajuih komponenti utvrdi ekvivalentnost zapisa.
Izraz za ubrzanje ( )/ / / /2A B A B A B A B A BB= + + + + a a a r r v matrino sada glasi:
-
Relativno gibanje: PRIMJERI
. Lozina: KINEMATIKA, FESB, 2011 2
( ) ( )/ / / /25 4 0 1 0 3 0 2 0 0 2 0 3 0 2 0 13 2 1 0 0 2 2 0 0 2 0 0 2 2 2 0 0 10 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
A B A B A B A B A BB
A
A
= + + + +
= + + + +
a a a r r v
a
a
% % %%
5 4 2 12 43 2 3 8 40 0 0 0 0
52
0A
= + + + +
=
a
Geometrijski zapisano, ubrzanje estice A je: aA=5i2j.
Primjer 2: Kolika je razlika ubrzanja estice B spram A to ih opaaju pomini i nepomini promatra ako pomini promatra u B mijenja orjentaciju (pravac) =d/dt, ====d/dt te pri tome opaa poloaj rA/B i brzinu vA/B estice A?
Rjeenje: ( ) ( )/ / / /2A B A B A B A B A BB = + + a a a r r v
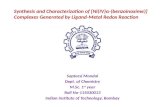
Primjer 3: Pliva pliva konstantnom brzinom vp s jedne na drugu obalu rijeke plivajui uvijek okomito na obalu. Brzina rijeke se mijenja od obale prema sredini toka u skladu s izrazom: vt(y)=y(L - y) gdje je L irina rijeke.
Slika: Odredi putanju te brzinu i ubrzanje plivaa kako ih vidi promatra s obale. Poznato: vp = 0.5m/s, L = m, vt = 2m/s.
Rjeenje: Poloaj plivaa na rijeci mjereno od obale (udaljenost od prve obale) je y(t) = vpt. Brzina kojom rijeka nosi plivaa nizvodno je vt(y) = y(L-y) = yL - y2. Nakon uvrtenja udaljenosti od obale u funkciji vremena u brzinu rijeke dobije se ovisnost brzine kojom rijeka nosi plivaa o vremenu: vt(t) = vptL - (vpt)2. Poloaj plivaa nizvodno se dobije integracijom brzine:
L
y
x
vt
vp
-
Relativno gibanje: PRIMJERI
. Lozina: KINEMATIKA, FESB, 2011 3
( )2
2
2 2 3
( ) - ( )( ) - ( )
( ) - 2 3
t p p
p p
p p
v t v Lt v t
x t v Lt v t dt
v Lt v tx t
=
=
=
gdje je uzeto x(0)=0. Poloaj plivaa na rijeci promatran s obale dan je sada parametarski x(t) i y(t), eliminiranjem vremena dobijemo putnju kako je vidi promatra s obale.
( )2 31( ) 3 - 26 px t L y yv=
Slika: Ukupna brzina i ubrzanje plivaa kako ih vidi promatra s obale su:
v = vti + vpj a = ati + 0j
gdje je: 2
t p p
2t p
( ) = - ( )( ) = - 2 p
v t v Lt v t
a t v L v t
Primjer 4: S obale se prati gliser pri emu se mjeri poloaj, brzina i ubrzanje glisera u polarnom koordinatnom sustavu: r, , vg i ag. Posada u gliseru prati objekt na horizontu kojem je izmjeren poloaj d, brzina vr i ubrzanje ar u koordinatnom sustavu glisera (x, y) prema slici.
x
y
-
Relativno gibanje: PRIMJERI
. Lozina: KINEMATIKA, FESB, 2011 4
Slika: Odredi brzinu i ubrzanje objekta kako ih vidi promatra na obali s komponentama u koordinarnom sustavu (X, Y) vezanom za obalu prema slici. Poznato: r = 150 , = 30o, vg = 8er+6e , ag = 2er+3e , vr = 5i+6j , ar = 4i-3j , d = 3i-4j.
Rjeenje: Koordinatni sustav glisera s vremenom mijenja orjentaciju pa su brzina i ubrzanje objekta:
o g r= + + v v v d ( ) 2o g r r= + + + + a a a d d v gdje su i relativna vremenska promjena orjentacije i relativna vremenska promjena brzine promjene orjentacije koordinatnog sustava glisera (x,y).
Odluili smo proraun provesti u koordinatnom sustavu (X, Y) promatraa na obali. (S ovim se izbjegava mnoenje jedininih vektora razliitih koordinatnih sustava, to pojednostavljuje raun. Meutim, sve vektore moramo prikazati u ovom (odabranom) koordinatnom sustavu.)
Brzine i ubrzanja glisera i objekta svodimo na koordinatni sustav promatraa. Matrica transformacija za gliser je (transformacija iz polarnog u pravokutni, jedinini vektori zakrenuti za ):
cos( ) sin( )sin( ) cos( )g
=
t
a za objekt (koji je mjeren u koordinatnom sustavu glisera zakrenutom u odnosu na obalu za ):
cos( ) sin( )sin( ) cos( )o
=
t
gdje je kut koordinatnog sustava glisera u odnosu na nepomini koordinatni sustav: =+atan(v/vr) izraunat iz pravca brzine glisera zakrenutog spram polarnog koordinatnog
y
r
vgag
x
ar
vr
d
X
Y
I
J
-
Relativno gibanje: PRIMJERI
. Lozina: KINEMATIKA, FESB, 2011 5
sustava za kut atan(v/vr). Za gliser i za objekt (relativno spram glisera, ali komponente prikazane u nepominom koordinatnom sustavu vezanom za obalu) dobivamo:
cos( ) sin( )sin( ) cos( )
rg
g
vXvY
=
&
&
cos( ) sin( )sin( ) cos( )
xr
yr
vXvY
=
&
&
odnosno: g g gX Y= +v I J& &
r r rX Y= +v I J& &
Slino, na koordinatni sustav promatraa na obali svodimo ubrzanja glisera i objekta: cos( ) sin( )sin( ) cos( )
rg
g
aXaY
=
&&
&&
cos( ) sin( )sin( ) cos( )
xr
yr
aXaY
=
&&
&&
odnosno: g g gX Y= +a I J&& &&
r r rX Y= +a I J&& &&
Na isti nain transformiramo i poloaj objekta u odnosu na gliser, d: cos( ) sin( )sin( ) cos( )
xX
yY
dddd
=
X Yd d= +d I J Kako je brzina glisera paralelna (i sinkrona) s pravcem koordinate osi x, nalazimo i :
3g
g g
v =
v a
gv
=
g
gv=
vT
T ga = a T
Ta
=
Poto su poznate brzine promjene orjentacije koordinatnog sustava glisera, = = = = k i = = = = k, moemo odrediti brzinu i ubrzanje objekta koje vidi promatra na obali: o g r= + + v v v d ( ) 2o g r r= + + + + a a a d d v
Rezultat: Koristei MATLAB skript, (m-file):
-
Relativno gibanje: PRIMJERI
. Lozina: KINEMATIKA, FESB, 2011 6
theta = pi*30/180; rit = 150;
r = [rit*cos(theta); rit*sin(theta); 0];
vg = [8; 6; 0]; ag = [2; 3; 0];
phi = theta + atan( vg(2,1)/vg(1,1) );
vr = [5; 6; 0]; ar = [4; -3; 0];
d = [3; -4; 0];
tg = [cos(theta), -sin(theta), 0; sin(theta), cos(theta), 0; 0, 0, 1] to = [cos(phi), -sin(phi), 0; sin(phi), cos(phi), 0; 0, 0, 1]
VVg = tg*vg; VVr = to*vr;
AAg = tg*ag; AAr = to*ar;
DD = to*d;
c=cross(VVg,AAg); ro=sqrt(dot(VVg,VVg))^3/sqrt(dot(c,c)); OMEGA = [0; 0; sqrt(dot(VVg,VVg))/ro] T = vg/sqrt(dot(vg,vg)); aT = dot(ag, T); ALFA = [0; 0; aT/ro]
Vo = VVg + VVr + cross(OMEGA, DD) Ao = AAg + AAr + cross(ALFA, DD) + cross(OMEGA, cross(OMEGA, DD)) + 2*cross( OMEGA, VVr)
dobije se:
tg =
-
Relativno gibanje: PRIMJERI
. Lozina: KINEMATIKA, FESB, 2011 7
0.8660 -0.5000 0 0.5000 0.8660 0 0 0 1.0000
to =
0.3928 -0.9196 0 0.9196 0.3928 0 0 0 1.0000
OMEGA =
0 0 0.1200
ALFA =
0 0 0.0408
Vo =
0.2321 16.7340 0
Ao =
2.7746 5.4263 0