Cinematic A Dinamica y Equilibrio Cr
21
UNIDAD VI CINEMÁTICA ROTACIONAL “ROTACIÓN DE CUERPOS RÍGIDOS” Cuerpo Rígido: Cuerpo con tamaño y forma definido e inmutable. La rotación se dará en un solo eje fijo (no se traslada) x, y ó z Tomaremos el eje z como el eje de rotación de un cuerpo rígido = s r s =r Donde: s: Longitud de arco (m) r: Radio del circulo formado por el cuerpo rígido) θ: Coordenada de rotación (radianes) donde 1 rad = 360º 2 =57.3º 180º = rad ; 90º = 2 ; ect. ING. SAMUEL ADOLFO DUEÑAS APARICIO 1
-
Upload
shadgedrick -
Category
Documents
-
view
499 -
download
5
Transcript of Cinematic A Dinamica y Equilibrio Cr

UNIDAD VI CINEMÁTICA ROTACIONAL “ROTACIÓN DE CUERPOS RÍGIDOS”
Cuerpo Rígido: Cuerpo con tamaño y forma definido e inmutable.
La rotación se dará en un solo eje fijo (no se traslada) x, y ó z
Tomaremos el eje z como el eje de rotación de un cuerpo rígido
= sr
s=r
Donde: s: Longitud de arco (m)
r: Radio del circulo formado por el cuerpo rígido)
θ: Coordenada de rotación (radianes)
donde 1 rad=360º2
=57.3º
180º=rad ;90º=2
;ect.
ING. SAMUEL ADOLFO DUEÑAS APARICIO 1

mediaz= f−it f−t i
= t velocidad angular media
z=lim / t=d dt velocidad angular instantánea
[S.I. ][rad /s ]ó[rev /s ]ó [rev /min]RPM
1 revs=2 rad
s
,−ócero ;dependerá en que sentido gire el cuerpo rigido.
La dirección de la proporciona la R.M.D.
Sentido antihorario + Sentido horario -
En un cuerpo rígido, todos los puntos giran el mismo angulo en el mismo tiempo. Por lo tanto, en
cualquier instante, todas las partes de un cuerpo rígido en rotación tienen la misma velocidad angular.
mediaz= fz−iz
t f−t i=z
t Aceleración angular media
z=lim z/ t=d z
dt=d
2dt
Aceleración angular instantánea
[S.I.] [rad / s2]
La dirección de :
Acelera cuando gira en el mismo sentido que z
Frena cuando gira en sentido opuesto a z
ING. SAMUEL ADOLFO DUEÑAS APARICIO 2

6.1 ROTACIÓN CON ACELERACIÓN ANGULAR CONSTANTE
Posición : xz
velocidad :vz
Aceleración :az
Comparación:
Lineal Rotacional
a x=cte z=cte
v x=v oa x t fz=izz t
x= xov ox t12
a x t 2 f=iiz t12z t 2
v x2=v ox
2 2ax x−x0 fz2 =iz
22 z f−i
x− xo=12v xvoxt f−i=
12 fziz t
Ejemplo # 1: Un disco uniforme gira alrededor de un eje fijo, partiendo del reposo y acelerándose con
aceleración angular constante. En un tiempo dado está girando a 10 rev/s. Después de completar 60 rev
más, su rapidez angular es de 15 rev/s. Calcular a) la aceleración angular, b) el tiempo requerido para
completar las 60 rev mencionadas, c) el tiempo requerido para alcanzar la rapidez angular de 10 rev/s y
d) el numero de revoluciones efectuadas desde el reposo hasta el tiempo en que el disco alcanza la
rapidez angular de 10 rev/s.
Datos:
i=0
f=60 rev
i=10 rev /s
f=15 rev / s
a) =?
fz2 =iz
22 z f−i
fz2 =iz
22 z f−i
fz2 =iz
22 z f
z= fz
2 −iz2
2 f
ING. SAMUEL ADOLFO DUEÑAS APARICIO 3

z=15 rev /s 2−10 rev / s2
2 60 rev
z=1.04 rev / s2 R/
b) t=?
f−i=12 fziz t
f=12 fziz t
t=2 f
fziz
t= 260 rev 1510 rev /s
t=4.8 s R/
c) t=?en alcanzar 10 rev /s
fz=iz z t
t= fz
z
t= 10 rev / s1.04 rev /s2
t=9.6 s R/
d) f=?
f−i=12 fziz t
f=12 fz t
f=1210 rev /s 9.6 s
f=48 rev R/
ING. SAMUEL ADOLFO DUEÑAS APARICIO 4

6.2 RELACIÓN ENTRE CINEMÁTICA LINEAL Y ANGULAR
s=r , donde r=cte ; s y=cambian
dsdt=
d r dt
dsdt
=rd
dt
v=rz Relación entre velocidad lineal y la angular
CARACTERÍSTICA:
Cuanto más lejos del eje de rotación está el punto, mayor es su rapidez lineal.
ING. SAMUEL ADOLFO DUEÑAS APARICIO 5

ar=v2
r
ar=r2
r
ar=2 r Aceleración centrípeta de un punto o cuerpo en rotación.
a tang=dvdt
a tang=d r
dt
a tang=rd
dt
a tang=r z Aceleración tangencial de un punto o cuerpo en rotación.
∣a∣=ar2atang2 Aceleración.
Ejemplo # 1: Al montar una bicicleta de varias velocidades, el ciclista puede seleccionar el radio de la
rueda trasera, que esta fija al eje trasero. La rueda dentada delantera tiene 12.0 cm de radio. Si la
rapidez angular de la rueda dentada delantera es de 0.600 rev/s, ¿Qué radio tiene la rueda dentada
trasera con la que la rapidez tangencial de un punto en el borde del neumático trasero es de 5.00 m/s?.
El neumático tiene 0.330 m de radio.
Datos:
r d=12.0cm
d=0.600 rev / s , d= 0.600 revs 2 rad
1 rev , d=3.77 rad /s
r t=?
vnt=5.00 m / s
r n=0.330 m
t=vnt
r n, t=
5.00 m /s 0.330m , t=15.15 rad /s
v t=v d
t rt=d rd
ING. SAMUEL ADOLFO DUEÑAS APARICIO 6

r t=d rd
t
r t=3.77 rad / s12cm
15.15 rad /sr t=2.99 cm R/
6.3 ENERGÍA EN EL MOVIMIENTO ROTACIONAL
Un cuerpo rígido en rotación es una masa en movimiento, así que tiene energía cinética.
v i=r i
K i=12
mi v i2
K i=12
miri2
K i=12mi r i
22 Energía cinética de i-esima partícula.
La energía total del cuerpo rígido es:
K T=12
m1 r1221
2m2 r2
22.........∑ 12
mi ri22
K T=12[m1 r 1
2m2 r 22]2=......... 1
2∑ mi r i
22
∑ mi ri2Momentode Inercia I
I=m1 r12m2 r 2
2.......∑ mi r i2
ING. SAMUEL ADOLFO DUEÑAS APARICIO 7
Eje de rotación

CARACTERÍSTICAS DE I
1. Depende de la distribución espacial de la masa del cuerpo rígido.
2. Cuanto mayor sea la distancia(r) al eje de rotación de las partículas, mayor será el momento de
inercia.
3. Para un cuerpo rígido, las distancias r i son constantes I S.I. [kg.m2]
K=12I 2 Energía Cinética Rotacional para un cuerpo Rígido
4. Cuanto mayor sea I, mayor será K
Cuanto mayor sea I: es más difícil ponerlo a girar y más difícil detener su rotación.
5. El valor de I depende del eje de rotación.
6. K 1U 1=K 2U 2Fuerzas conservativas
K 1U 1W otras=K 2U 2Fuerzas no conservativas , K=12
m v212
I 2
Ejemplo # 1: Tres objetos idénticos, cada uno de masa M, están conectados por dos barras de masas
despreciables (ver figura). El momento de Inercia alrededor del eje de rotación es:
I=M L2M L2
2
M L2
I=ML2
4ML2
I=ML2 141
I=5ML2
4R/
ING. SAMUEL ADOLFO DUEÑAS APARICIO 8

Ejemplo # 2: La polea de la figura tiene 0.160 m de radio y su momento de inercia es de 0.480 kg.m2.
La cuerda no resbala en la polea. Use métodos de energía para calcular la rapidez del bloque de 4.00 kg
justo antes de golpear el piso.
Tomando como nivel de referencia el piso.
Energia mecanica antes=Energia mecanica despues
m4 gh=12
mt v212
I 2m2 gh
m4 gh−m2 gh=12
mt v212
I vr
2
m4 gh−m2 gh=12
mt v212
I v2
r2
m4 gh−m2 gh=12
v2 mtIr 2
v= 2ghm4−m2
mtIr2
v= 29.8 m / s25m 4−2kg
6 kg 0.480 kg.m20.160 m 2
v=2.81m / s R/
ING. SAMUEL ADOLFO DUEÑAS APARICIO 9

Ejemplo # 3: Una cubeta con agua con masa de 15.0 kg se suspende de una cuerda enrollada en un
rodillo, es un cilindro sólido de 0.300 m de diámetro y masa de 12.0 kg, pivotando en un eje sin
fricción que pasa por su centro. La cubeta se suelta del reposo en el borde de un pozo y cae 10.0 m al
agua. El peso de la cuerda es despreciable. ¿Con qué rapidez golpea la cubeta el agua?
Datos:
m=15 kg
=0.300 m
M=12 kg
h=10 m
K 1U 1=K 2U 2
0mgh=12
m v212
I 2
mgh=12
m v212[ 12
MR2 vR
2
]
mgh=12
m v212[ 12
M R2 v2
R2 ]
mgh=12
m v2 14M v2
mgh=v212
m14
M v= mgh
12
m14
M v= 15kg 9.8m /s210m
1215 kg 1
412kg
v=11.83m /s R/
ING. SAMUEL ADOLFO DUEÑAS APARICIO 10
m
M R
h
1
2

6.4 TEOREMA DE LOS EJES PARALELOS
La relación entre el momento de inercia I cm de un cuerpo de masa M alrededor de un eje que pasa
por el centro de masa y el momento de inercia I p alrededor de cualquier otro eje paralelo al original
pero desplazado una distancia d (ejecm – ejep)
I p=I cmMd2 Teorema de los ejes paralelos.
Demostración:
d 2=a2b2
I cm=∑ mi ri2
I cm=∑ mix i y i2
I p=∑ mi ri ´2
I p=∑ mi[xi−a 2 y i−b2]
I p=∑ mi [ x i2−2axia2 y i
2−2by ib2]
I p=∑ mix i2 yi
2−2a∑ mi x i−2b∑mi y ia2b2∑ mi
I p= I cm−0d 2 M
I p=I cmd2M
Donde:
M=masa total
d=distancia entre ejecm y eje p
I p I cm
ING. SAMUEL ADOLFO DUEÑAS APARICIO 11

Ejemplo # 1: Con el teorema de los eje paralelos encuentre los momentos de inercia de a) un cilindro
sólido alrededor de un eje paralelo al eje del centro de masa y que pase por el borde del cilindro, y b)
una esfera sólida alrededor de un eje tangente a su superficie.
I p= I cmMd 2 I p= I cmMd 2
I p=12
MR2MR2 I p=25
MR2MR2
I p=MR2 121 I p=MR2 2
51
I p=32MR2 R/ I p=
75MR2 R/
ING. SAMUEL ADOLFO DUEÑAS APARICIO 12
Ip
d
Ip
d

ING. SAMUEL ADOLFO DUEÑAS APARICIO 13

UNIDAD VII DINÁMICA DEL MOVIMIENTO ROTACIONAL
7.1 MOMENTO DE TORSIÓN
¿De que depende la efectividad de una fuerza para causar o alterar un movimiento rotacional?
Depende de:
1. Magnitud y dirección de la fuerza
2. Posición del punto de aplicación (Distancia)
Ej:
* Abrir o cerrar una puerta.
* Atornillar o desatornillar tornillos o tuercas
La medida cuantitativa de la tendencia de una fuerza para causar la rotación de un cuerpo se denomina
“Momento de Torsión”
=FL :Momento de torsión
F : Fuerzas aplicada
L : Distancia del eje de rotacióna la fuerza aplicada Brazode palanca
F es perpendicular a L
si F≠perpendicular a LHay quebuscar la forma de que lo sean.
=FL
=Fsen LSaliendo de la pagina
=r x F Formato vectorial.
Positivo si gira ensentido Antihorario. Y Negativo si gira en sentido Horario.
ING. SAMUEL ADOLFO DUEÑAS APARICIO 14

Otros casos:
Ejemplo # 1: Encontrar el torque neto sobre el volante en la figura alrededor del eje O si a= 10.0 cm y
b = 25.0 cm.
t=F 1a−F2b −F3b
t=12.0 N 0.1 m −9.00 N 0.25 m−10.0 N 0.25 m
t=−3.55N.m R/
ó t=3.55 N.m (entrando a la pagina)
ING. SAMUEL ADOLFO DUEÑAS APARICIO 15

7.2 MOMENTO DE TORSIÓN Y ACELERACIÓN ANGULAR DE UN CUERPO RÍGIDO
Se demostrará que la aceleración angular de un cuerpo rígido en rotación es directamente proporcional
a la suma de las componentes del momento de torsión sobre el eje de rotación. El factor de
proporcionalidad es el momento de inercia. z∝∑ Fd
2ª Ley de Newton
∑ F=ma
F 1tan=m1 a1tan
F 1tan=m1 r1z (multiplicando por r1)
F 1tan r1=m1 r12 z
1z=I 1 z (para una partícula)
∑z=1z2z........
∑z=∑ mi r i2 z
∑z=I z 2ª Ley de Newton para un cuerpo rígido en rotación.
Se usarán :
∑ F=ma Para las partículas
∑z=I z Para los cuerpos rígidos.
ING. SAMUEL ADOLFO DUEÑAS APARICIO 16

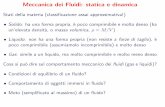
Ejemplo # 1: Un bloque de masa m1=2.00kg y un bloque de masa m1=6.00 kg están conectados
por una cuerda sin masa sobre una polea que es un disco solido de R=0.250 m y masa
M=10.0 kg . Los bloques se mueven hacia abajo de la pendiente que tiene un angulo de =30º
ver figura. El coeficiente de fricción cinético para ambos bloques es de 0.360. Determine a) la
aceleración de los dos bloques y b) las tensiones que hacen girar la polea.
∑ F y=0
N1−m1 g =0
N 1=m1 g
∑ F x=ma
T 1− f k=m1 a
T 1−k N 1=m1a
T 1−k m1 g=m1a
T 1=m1 ak m1 g (1)
ING. SAMUEL ADOLFO DUEÑAS APARICIO 17
D.C.L. (m1)
x
y
T1fk
m1g
N1

∑ F y=0
N 2−m2 g cos=0
N 2=m2 g cos
∑ F x=ma
m2 g sen−T 2− f k=m2 a
m2 g sen−T 2−k N 2=m2 a
T 2=m2 g sen −k m2 g cos −m2 a (2)
∑=I
RT 2−RT 1=12
M R2 aR
R T 2−RT 1=12
M R a
T 2−T 1=12
M a (3)
Sustituyendo las ecuaciones (1) y (2) en (3):
m2 g sen−k m2 g cos−m2 a−m1 ak m1 g =12
Ma
m2 g sen−k m2 g cos−m2 a−m1a−k m1 g=12
Ma
ING. SAMUEL ADOLFO DUEÑAS APARICIO 18
x
y
D.C.L. (m2)
30ºm2gcosθ m2gsenθ
N2T2
fk
m2g30º
D. E. (polea)

m2 g sen−k m2 g cos−k m1 g=12
M am1 am2 a
m2 g sen−k cos −k m1 g=a 12
Mm1m2
a=m2 g sen −k cos−k m1 g
12
M m1m2
a=6kg 9.8 m / s2[ sen30º−0.360cos30º ]−0.3602 kg 9.8m /S 2
1210 kg 2 kg6 kg
a=0.309m / s2 a) R/
Sustituyendo la aceleración en (1) y (2)
T 1=m1 ak m1 g
T 1=m1ak g
T 1=2 kg [0.309 m/ s20.360 9.8m / s2]
T 1=7.67 N R/
T 2=m2 g sen −k m2 g cos −m2 a
T 2=m2[ g sen−k g cos−a ]
T 2=6kg [ 9.8 m /s2 sen30º−0.3609.8m /s2cos30º−0.309m / s2]
T 2=9.21N R/
ING. SAMUEL ADOLFO DUEÑAS APARICIO 19

UNIDAD VIII: EQUILIBRIO DE CUERPOS RÍGIDOS
8.1 CONDICIONES DE EQUILIBRIO
Cuerpo rígido en reposo, no se traslada ni gira.
1. ∑ F=o :
∑ F x=o
∑ F y=o
2. ∑ =0 Alrededor de cualquier punto.
Ejemplo # 1: El asta de una bandera horizontal de 5.00 m de longitud y peso de 200 N pivotea en una
pared en un extremo, y una acróbata de 600 N cuelga del otro. El asta es sostenida por un cable que va
de su extremo exterior a un punto en la pared directamente arriba del asta. Si la tensión en el cable no
excede 1000 N. ¿A qué altura mínima sobre el asta puede fijarse el cable en la pared?
Datos:
L=5.00 m
W bandera=200 N
W Acróbata=600 N
T cable=1000 N
y=?
ING. SAMUEL ADOLFO DUEÑAS APARICIO 20
Fuerzas internas
5 my = ?
D.E. (bandera)
θ
T Ty
TxFh
Fv200 N
600 N5 m
5 m

∑ F x=0
F h−T x=0
F h=Tcos
∑ F y=0
F vT y−200 N−600 N =0
F vTsen−200 N−600 N=0
∑=0
Ty−200−600=0
Ty=200600
T y L=200 L2600L
T y L=200 L2600 L
T y=2002
600
T y=700 N
sen=T y
T
=sen−1T y
T =sen−1 700 N
1000 N , =44.43º
tan= y5m
y=5 m tan
y=5m tan 44.43º
y=4.90m R/
ING. SAMUEL ADOLFO DUEÑAS APARICIO 21
θ
y
5 m