bodeclases
30
Regulación Automática M.G. Ortega Tema 5 (2) : Diagrama de Bode. Técnica de construcción. ¿Dominio frecuencial? 0 0 AR φ Im Re A
-
Upload
gabriel-rojas-zanabria -
Category
Documents
-
view
626 -
download
0
description
esta informacion esta bacan espero la aprovechen
Transcript of bodeclases

Regulación Automática M.G. Ortega
Tema 5 (2): Diagrama de Bode. Técnica de construcción.
¿Dominio frecuencial?
0
0
AR
φ
Im
Re
A

Regulación Atutomática M.G. Ortega
Introducción
SistemaLinealizado
u(t)
Dobleobjetivo
t
f(t)yrp(t)
1
2
G(s)
Am
t
ω
ω
Respuesta frecuencial

Regulación Automática M.G. Ortega
Respuesta en frecuencia
tUsentu ω=)( )()()( φωω += tsenjGUty ss
Amplitud de la salida: )( ωjGUY =
Ángulo de fase: )())(arg( ωωφ jGjG ∠==
La respuesta del sistema oscila con la misma frecuencia ω que la sinusoide de entrada pero atenuada por un factor |G(jω)| y desfasada un ángulo φ = arg(G(jω)) que dependen de ω
G(s) y(s)u(s)

Regulación Automática M.G. Ortega
Respuesta en frecuencia
Dada Dada G(sG(s), a cada frecuencia se le asocia un número complejo ), a cada frecuencia se le asocia un número complejo
-1.942.55-0.653.20.5
-1.250.63-1.11.41
-1.46-0.34-1.80.155
……………
-1.444.48-0.314.70.1
08080
Im(G (jω))Re(G (jω))<G (jω)>|G (jω)|ω(rad/s)

Regulación Automática M.G. Ortega
Representaciones de la respuesta frecuencial
•Diagrama polar (diagrama de diagrama de NyquistNyquist) (1932) diagrama de la amplitud de G(jω) en función del ángulode fase de G(jω) en coordenadas polares al variar ωdesde cero a infinito
•Diagrama logarítmico (diagrama de Bodediagrama de Bode) (1945)2 curvas en función de la frecuencia en escalalogarítmica:
1. relación de amplitudes |G(jω)| [dB]2. ángulo de fase φ(ω) [º]
• Diagrama magnitud–fase (diagrama Nicholsdiagrama Nichols)diagrama del logaritmo del módulo en función de la fasepara un rango de frecuencias de interés

Regulación Automática M.G. OrtegaFrequency (rad/sec)
Pha
se (
deg)
; M
agni
tude
(dB
)
Bode Diagrams
10-1 100 101-100
-50
0
50
To:
Y(1
)
-20
-10
0
10From: U(1)
Diagrama de Bode
Consta de 2 trazados representados en función de la frecuencia en escala logarítmica
1. Diagrama del logaritmo del módulo de una función sinusoidal
2. Diagrama del ángulo de fase
arg(G(jω)) [º] en grados
20log|G(jω)| [dB](en decibelios)
ω en escalalogarítmica
Matlab:bode(sys)
dB = 20log (| . |)

Regulación Automática M.G. Ortega
¿Por qué diagramas logarítmicos?
Considerando la siguiente función de transferencia:
))...()(())...()(()(
21
21
nN
kds
pspspsszszszsKesG
++++++
=−
La magnitud de la respuesta en frecuencia es el producto de la magnitud de las respuestas en frecuencia de cada término:
ω
ωjsn
N
kds
pspspss
zszszseKjG
=
−
+++
+++=
)(...)()(
)(...)()()(
21
21

Regulación Automática M.G. Ortega
¿Por qué diagramas logarítmicos?
( ) ...)(log20log20...
...)(log20log20log20)(log20
1
1
−+−−+
++++= −
pjj
zjeKjGN
dj
ωω
ωω ω
En decibelios, el diagrama de |G(jω)| puede obtenerse por superposición de los diagramas de términos elementales correspondientes a cada polo, cero, ganancia y retardo.
...))/(1arg()/1arg(...)arg()arg()arg())(arg(
1
1
++++++++= −
pjjzjeKjG Nj
ωωωω ω
ω
ωjsn
N
kds
pspspss
zszszseKjG
=
−
+++
+++=
)(...)()(
)(...)()()(
21
21
dBjG )( ω

Regulación Automática M.G. Ortega
Factores básicos
Los factores básicos en una función arbitraria G(jω) son:
1. Ganancia K
2. Factores integrales y derivativos
3. Factores de primer orden
4. Factores cuadráticos
5. Retardo
( ) 1mωj
( ) 11 ±+ Tjω12
21
±
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛++
nn
jjω
ωωω
δ
La respuesta en frecuencia del sistema puede obtenerse por superposición de los diagramas de los términos elementales que componen la función de transferencia.
ωdje−

Regulación Automática M.G. Ortega
Bode real y asintótico
El diagrama de Bode asintótico es una aproximación en base a líneas rectas tanto de la magnitud como de la fase.
El diagrama de Bode real es el dibujo exacto.
A mano es más sencillo y rápido dibujar el Bode asintótico.

Regulación Automática M.G. Ortega
Bode: respuesta de una constante (ganancia)
KjGKsG=
=)(
)(ω KjG log20)(log20 =ω
0K º1800K º00)(
⎩⎨⎧
<−>
==∠=K
arctgjG ωφ
El Bode de una constante son líneas rectas

Regulación Automática M.G. Ortega
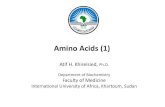
Bode: respuesta de un polo en el origen (integrador)
ωω
jjG
ssG 1)( 1)( ==
[dB] log20log201log20
1log20)(log20
ωω
ωω
−==−=
==j
jG
⎪⎩
⎪⎨
⎧
−⇒=⇒=
⇒=
dBdB
dB
201001
201.0
ωωω
º901
1)(
−=∠−∠=
∠=∠=
ωω
ωφ
jj
jG
Pendiente = -20 dB/década
La curva de la magnitud logarítmica es una recta con una pendiente de –20 dB/década que pasa por cero dB en ω=1 rad/s.La gráfica de fase es igual a una constante de –90º.

Regulación Automática M.G. Ortega
Bode Diagram
Frequency (rad/sec)
Pha
se (
deg)
Mag
nitu
de (
dB)
-150
-100
-50
0
50
100
10-1
100
101
102
-271
-270.5
-270
-269.5
-269
Bode: respuesta de un polo múltiple en el origen (integrador)
( )NN jjG
ssG
ωω 1)( 1)( ==
( )
[dB] log20log201log20
1log20)(log20
ωω
ωω
N
jjG
N
N
−==−=
==
⎪⎩
⎪⎨
⎧
⋅−⇒=⇒=
⋅⇒=
dBNdB
dBN
201001
201.0
ωωω
( ) º901
1)(
Njj
jG N
⋅−=∠−∠=
∠=∠=
ωω
ωφ
Pendiente = -20N dB/década
La curva de la magnitud logarítmica es una recta con una pendiente de –20N dB/década que pasa por cero dB en ω=1 rad/s.La gráfica de fase es igual a una constante de –90º·N.

Regulación Automática M.G. Ortega
Bode Diagram
Frequency (rad/sec)
Pha
se (
deg)
Mag
nitu
de (
dB)
-100
-50
0
50
100
150
10-1
100
101
102
-91
-90.5
-90
-89.5
-89
Bode: respuesta de un cero múltiple en el origen
( )NN jjGssG ωω == )( )(
( )
[dB] log20log20
log20)(log20
ωω
ωω
n
jjGN
N
===
==
⎪⎩
⎪⎨
⎧
⋅⇒=⇒=
⋅−⇒=
dBNdB
dBN
201001
201.0
ωωω
( ) º901
)(Nj
jjG N
⋅=∠−∠=∠=∠=
ωωωφ
Pendiente = 20N dB/década
La curva de la magnitud logarítmica es una recta con una pendiente de 20N dB/década que pasa por cero dB en ω=1 rad/s.La gráfica de fase es igual a una constante de 90º·N.
¡OJO!

Regulación Automática M.G. Ortega
Bode: respuesta de un polo simple
ωω
TjjG
TssG
+=
+=
11)(
11)(
[dB] 1log20
11log20)(log20
22T
TjjG
ω
ωω
+−=
=+
=
)()( ωωφ TarctgjG −=∠=
⎪⎪
⎩
⎪⎪
⎨
⎧
−→>>−→+−⇒∞→
→<<→+−⇒→
º90 1/T)(log201log20s)frecuencia (altas
º0 1/T)(01log20 s)frecuencia (bajas 0
22
22
φωωωω
φωωω
TT
T
(Ejemplo para T=1)
Cuando ω=1/T la aproximación de alta frecuencia es igual a la aproximación de baja frecuencia y también φ=45ºω=1/T = frecuencia de corte (de transición)Cuando ω=10/T, el log de la amplitud es de –20 dB

Regulación Automática M.G. Ortega
Bode: respuesta de un polo simpleωc = 1/T = frecuencia del polo:
la frecuencia a la que se encuentran las dos asíntotas
La frecuencia del polo divide la curva de la respuesta de frecuencia en dos regiones: una curva (línea de 0 dB) para la región de baja frecuencia (0< ω<1/T ) y una curva (línea recta con pendiente –20 dB/década) para la región de alta frecuencia (1/T< ω<∞).El error máximo se produce en la frecuencia de transición.
Pendiente = -20 dB/décadaCurva exacta
Error max. 3dB
Pendiente = -45º/dec
real
asintótico
ω=0.1/T
ω=10/T
ωc

Regulación Automática M.G. Ortega
Bode: respuesta de un polo simple
T>0 (polo estable) T<0 (polo inestable)
-90º
-45º
-20 dB/dec
asintótico
ω=1/T
0º ω=1/T ω=10/Tω=0.1/T
asintótico0 dB
asintótico
0ºω=1/T ω=10/Tω=0.1/T
-90º
-45º
-20 dB/dec
ω=1/Tasintótico
0 dB

Regulación Automática M.G. Ortega
Bode: cero simple
log ω
|G(jω)| en dB
log ω
argG(jω) en º
1/T0 dB
0º
90º
-20 dB
10/T
Frecuencia de corte
1/T
45º
( )
T
TarctgTj
T
TT
T
T
TTj
/1 paraº45 creciente, ntemonótonameº90
00)(1arg
dB) 0 , 1/(por pasa quey 20dB pendiente de recta
log20log20)1log(10 para
0)1log(100 paraedecrecient ntemonótoname
)1log(10
1log201log20
22
22
22
22
==⎩⎨⎧
→∞→→→
=+
=
+→+
∞→→+→
+=
=+=+
ωφφωφω
ωω
ω
ωω
ωωω
ω
ωω
Las frecuencias altas se amplifican
ωω jTjGsTsG +=+= 1)( 1)(

Regulación Automática M.G. Ortega
Bode: respuesta de un cero simple
T>0 (cero fase mínima) T<0 (cero fase no mínima)
20 dB/dec
asintótico
ω=1/T
0ºω=1/T ω=10/Tω=0.1/T
asintótico
-90º
-45º
0 dB
-90º
-45ºasintótico
0º ω=1/T ω=10/Tω=0.1/T
20 dB/dec
asintótico
0 dB

Regulación Automática M.G. Ortega
Bode: polos complejos conjugados
222
2
21
12
)(
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+
=++
==
nn
jsnn
n
jjss
jG
ωω
ωωδ
ωδωωω
ω10 << δdonde
22
2
2
2 21log20
21
1log20)(log20 ⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛−−=
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+
=nn
nn
jj
jGωωδ
ωω
ωω
ωωδ
ω
Modulo:
Cuando 7071.02/10 =≤< δ
nnr ωδωω ≤−= 221
frecuencia de resonancia2max 12
1)()(δδ
ωω−
=== rr jGjGM
existirá un máximo en |G(jω)| conocidocomo pico de resonanciapico de resonancia Mr cuando
frecuencia de resonancia
22
2
2)(
nn
n
ssjG
ωδωωω
++=

Regulación Automática M.G. Ortega
Bode: polos complejos conjugados
El ángulo de fase2
21
1)(
⎟⎟⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛+
=
nn
jj
jG
ωω
ωωδ
ω
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
⎟⎟⎠
⎞⎜⎜⎝
⎛−
−=∠= 2
1
2)(
n
narctgjG
ωω
ωωδ
ωφEl ángulo de fase depende tanto de ω como de δ
º180º90
º00
−→⇒∞→−=⇒=
→⇒→
φωφωωφω
nEn la frecuencia de transición el ángulo es –90º independientemente de δ
En la frecuencia en que se produce el pico de resonancia ω=ωr: δ
δφ221 −
−= arctg

Regulación Automática M.G. Ortega
Bode: polos complejos conjugadosCaso δ < 0.707 (caso con resonancia)
0.9899)1.0(21
212
2
=−=
=−= δωω nr
5.0252)1.0(1)1.0(2
112
1
2
2
=−
=
=−
=δδ
rM
Ejemplo para ωn=1 y δ=0.1
AsíntotasReal
Pico de resonancia20logMr
ωr frecuencia de resonancia
ωn : frecuencia de natural de oscilación
-90º/dec
-40dB/dec
0.1 ωn
10 ωn
La amplitud de la salida se ve amplificada a ciertas frecuencias y es máxima para ωr,, creciendo inversamente con δ
∞→⇒→ rM 0δ

Regulación Automática M.G. Ortega
Bode: polos complejos conjugados
Respuesta del logaritmo de la magnitud normalizada y escalada

Regulación Automática M.G. Ortega
Ejercicio:
Dibujar el bode de: 2)10)(110()1(1000)(
sssssG
++−
=
⎩⎨⎧
−=−∠=−
=−=++
−=
→→ º180)100(40100
100)10)(110(
)1(1000lim)(lim0
2
0
dBss
sssGss
1. Análisis a baja frecuencia :
• Ganancia a ω=1 rad/s :
( )⎩⎨⎧
−−
⇒=º180:
/40:2)(
FasedecdBPendiente
sGtipo•

Regulación Automática M.G. Ortega
Ejercicio:
40
dB•
0
)(º∠
º360−
)/( sradω
)/( sradω
1 10 1001.001.0
1 10 1001.001.0
20
20−
6080
100
º180−º270−
º90−º0
decdB /40−

Regulación Automática M.G. Ortega
Ejercicio:
Dibujar el bode de: 2)10)(110()1(1000)(
sssssG
++−
=
2. Polos y ceros:
⎩⎨⎧
−=−=
)(01)(1.0
:2
1
establepestablep
polos
)(01: mínimanofasedeccero >=

Regulación Automática M.G. Ortega
Ejercicio:
40
dB•
0)/( sradω
1 10 1001.001.0
20
20−
6080
100 decdB /40−
decdB /60−
decdB /40−
decdB /60−
)(º∠
)/( sradω
1 10 1001.001.0º450−º540−º630−
º360−

Regulación Automática M.G. Ortega
Ejercicio:
Matlab:
Gs=tf(100*[1 -10],conv([10 1 0 0],[1 1]));bode(Gs);
bode(100*[1 -10],conv([10 1 0 0],[1 1]));
2)10)(110()1(100)(
sssssG
++−
=

Regulación Automática M.G. Ortega
-150
-100
-50
0
50
100
150
200
Mag
nitu
de (
dB)
10-3
10-2
10-1
100
101
102
103
-270
-225
-180
-135
-90
-45
0
Pha
se (
deg)
Bode Diagram
Frequency (rad/sec)
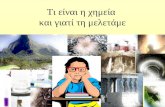
Ejercicio:
Matlab:
2)10)(110()1(1000)(
sssssG
++−
=
¡Cuidado!

Regulación Automática M.G. Ortega
Resumen
Empezar a dibujar por baja frecuencia con recta:Pendiente: -20*N dB/dec (N: tipo del sistema)Punto: lims →0 G(s)sN en ω=1 rad/s
Si polo real:Ganancia: pediente disminuye en -20 dB/dec.Fase: si polo es estable (inestable), disminuye (aumenta) 90º en dos décadas centradas en el polo.
Si cero real:Ganancia: pediente aumenta en 20 dB/dec.Fase: si cero es de fase mínima (no mínima), aumenta(disminuye) 90º en dos décadas centradas en el polo.
Si polos complejos conjugados:Ganancia: pediente disminuye en -40 dB/dec., pero con resonancia.Fase: si polos estables (inestables), disminuye (aumenta) 90º en menos de dos décadas centradas en la frec. natual de los polos.