Vimos que la magnitud del torque es τ= rF sinφacademic.uprm.edu/jalemar/cap11confe1.pdf · El...
18
Torque expresado como un producto vectorial Vimos que la magnitud del torque es El producto vectorial de dos vectores A y B es: φ τ sin rF = n AB B A ˆ sin φ = × Usando esta definición, escribimos el torque en forma vectorial: F r × = τ
Transcript of Vimos que la magnitud del torque es τ= rF sinφacademic.uprm.edu/jalemar/cap11confe1.pdf · El...
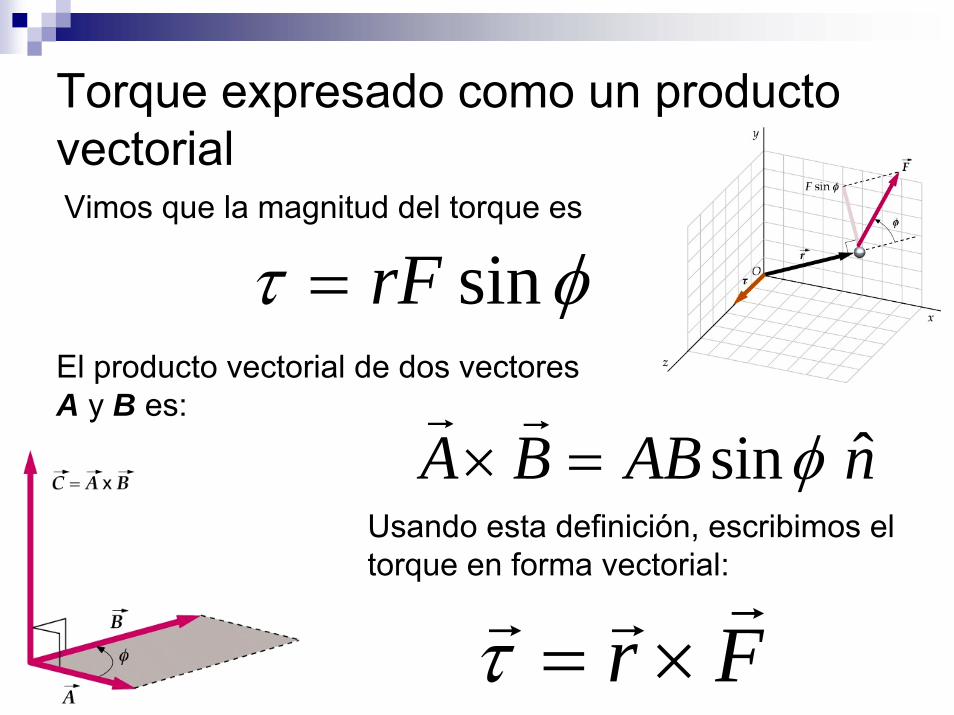
Torque expresado como un producto vectorialVimos que la magnitud del torque es
El producto vectorial de dos vectores A y B es:
φτ sinrF=
nABBA ˆsinφ=×Usando esta definición, escribimos el torque en forma vectorial:
Fr ×=τ
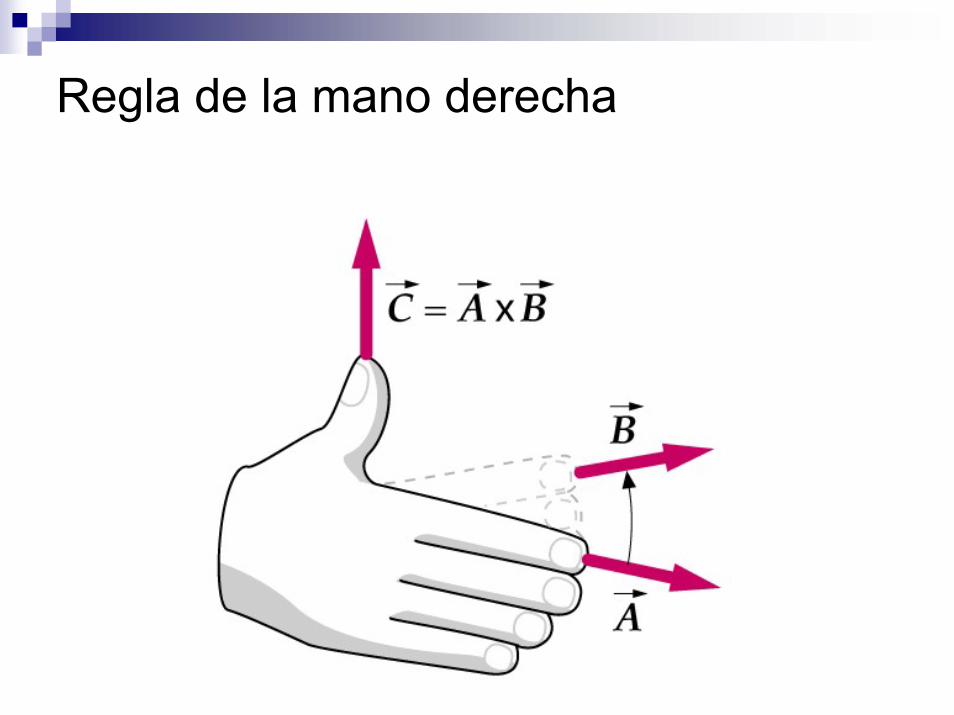
Regla de la mano derecha
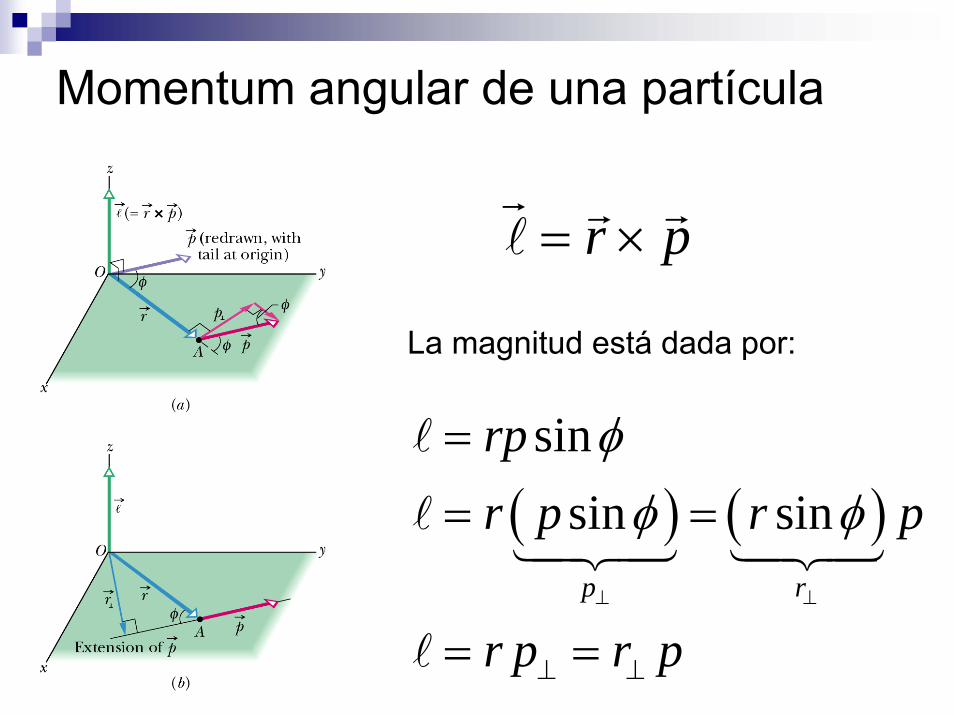
Momentum angular de una partícula
r p= ×
( ) ( )sin
sin sinp r
rpr p r p
r p r p
La magnitud está dada por:
φφ φ
⊥ ⊥
⊥ ⊥
=
= =
= =
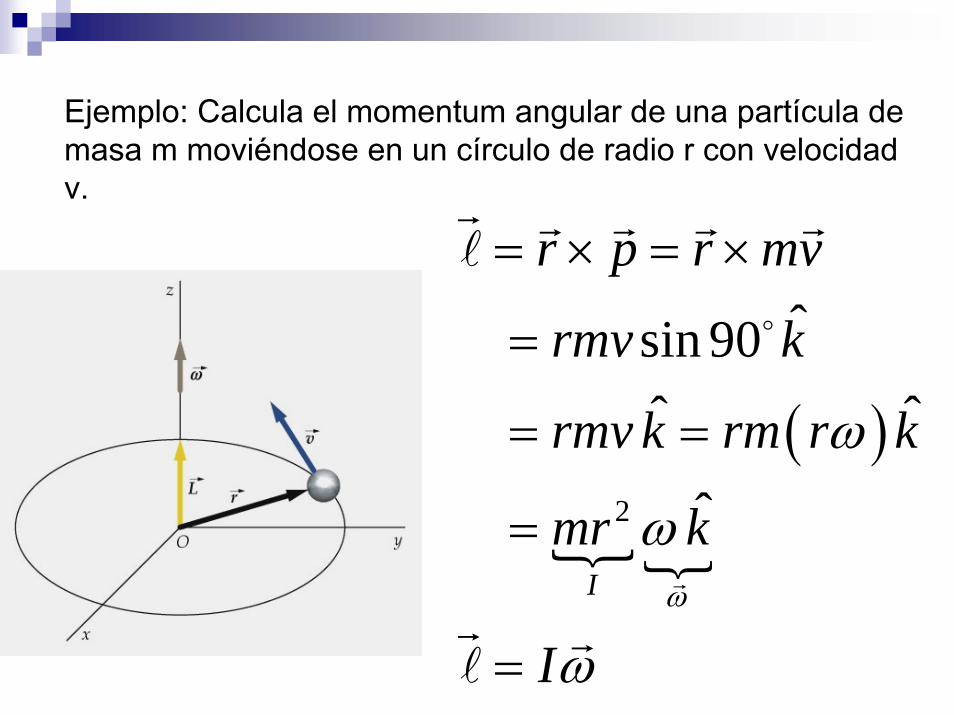
Ejemplo: Calcula el momentum angular de una partícula de masa m moviéndose en un círculo de radio r con velocidad v.
( )2
ˆsin 90ˆ ˆ
ˆI
r p r mv
rmv k
rmv k rm r k
mr k
Iω
ω
ω
ω
= × = ×
=
= =
=
=
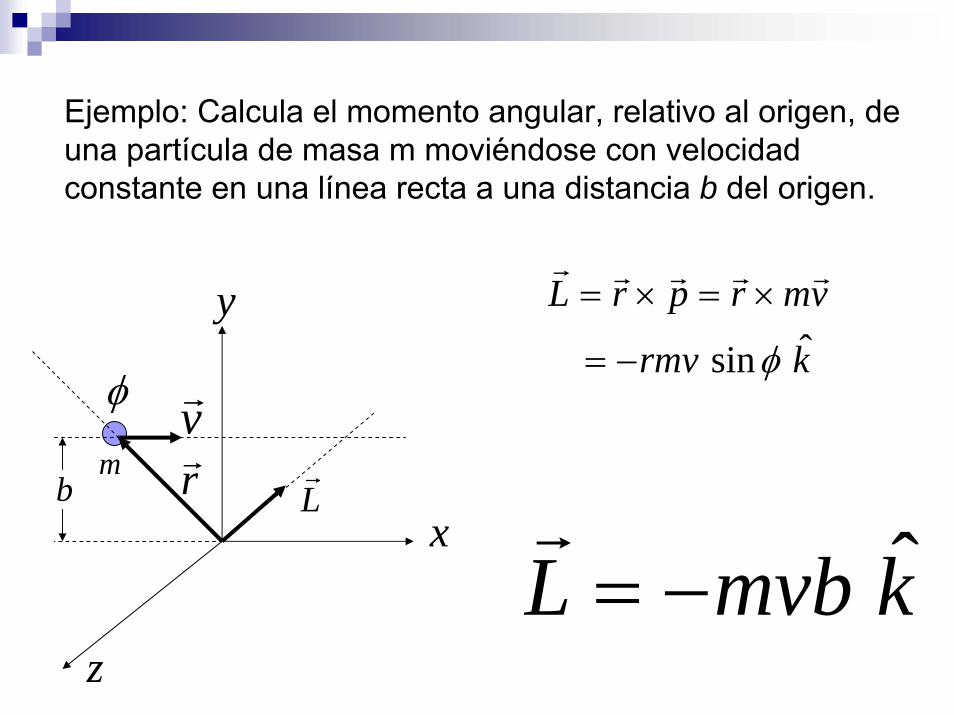
Ejemplo: Calcula el momento angular, relativo al origen, de una partícula de masa m moviéndose con velocidad constante en una línea recta a una distancia b del origen.
krmv
vmrprLˆsinφ−=
×=×=
m
φ vrb L
z
y
xkmvbL ˆ−=
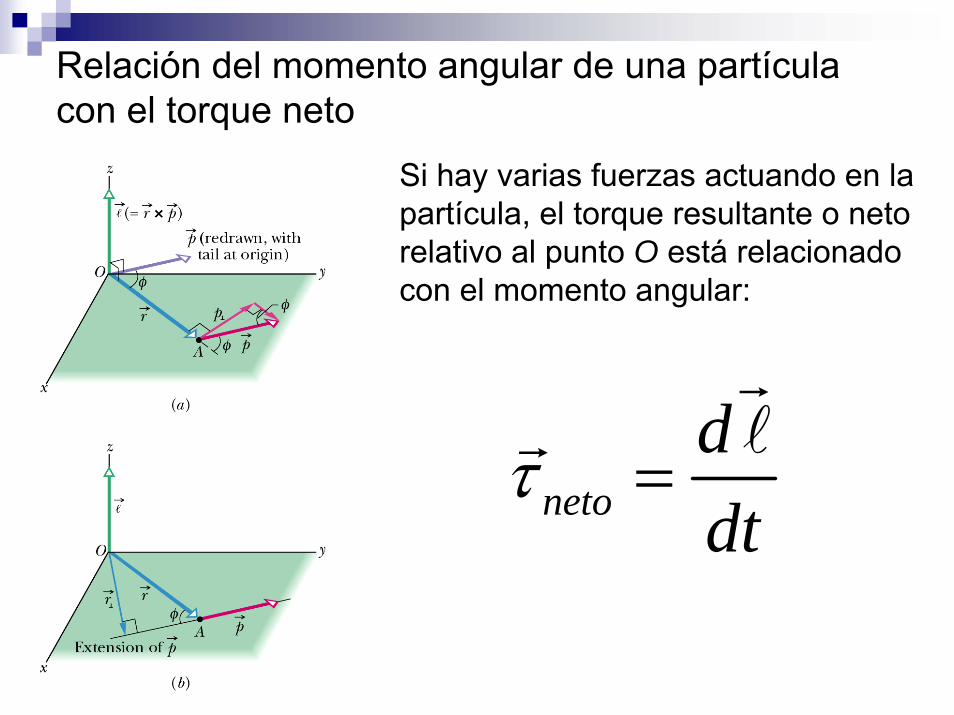
Relación del momento angular de una partícula con el torque neto
Si hay varias fuerzas actuando en la partícula, el torque resultante o neto relativo al punto O está relacionado con el momento angular:
netoddt
τ =
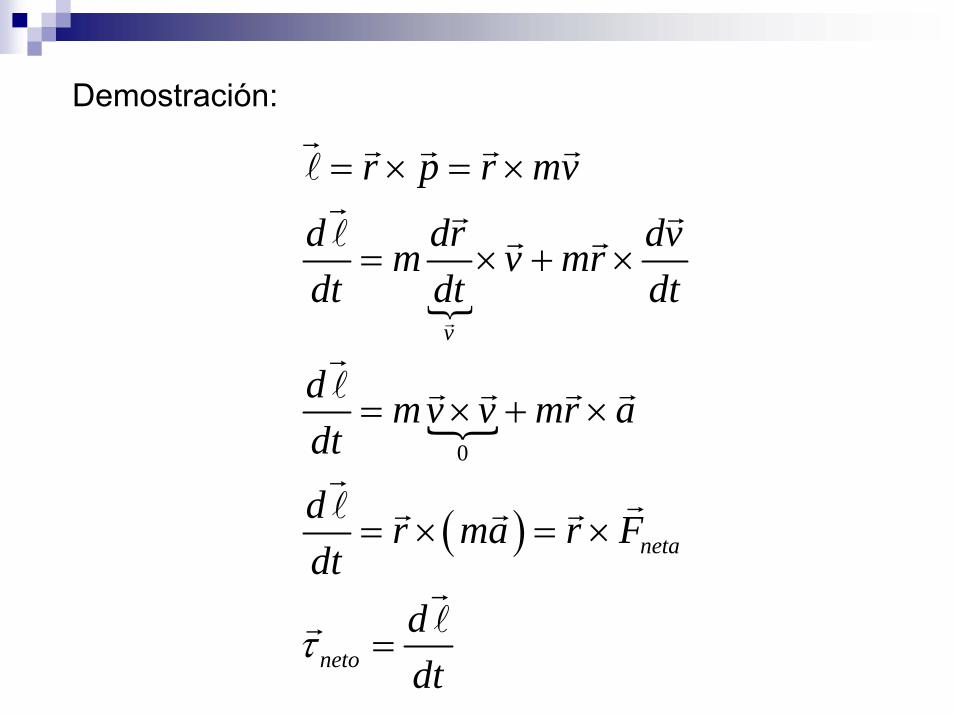
Demostración:
( )
0
v
neta
neto
r p r mv
d dr dvm v mrdt dt dt
d mv v mr adtd r ma r Fdt
ddt
τ
= × = ×
= × + ×
= × + ×
= × = ×
=
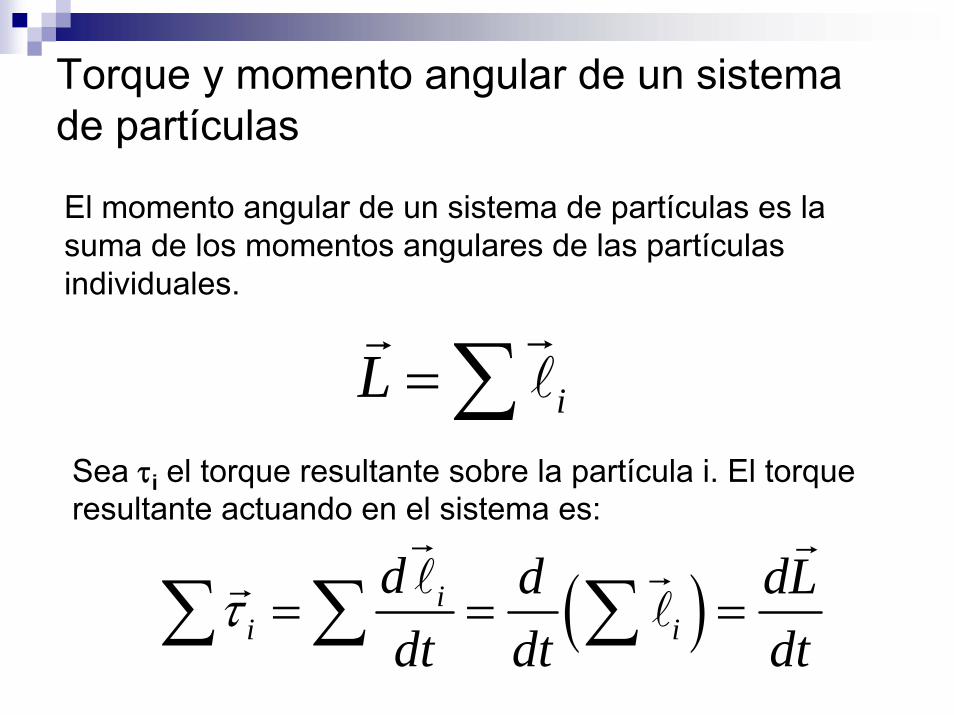
Torque y momento angular de un sistema de partículas
El momento angular de un sistema de partículas es la suma de los momentos angulares de las partículas individuales.
iL =∑
( )ii i
d d dLdt dt dt
τ = = =∑ ∑ ∑
Sea τi el torque resultante sobre la partícula i. El torque resultante actuando en el sistema es:
Torque y momento angular de un sistema de partículas
Probaremos ahora que si las fuerzas internas actúan a lo largo de la línea que une las partículas, la suma de los torques internos es cero. En ese caso,
∑ =dtLd
extτ
Torque y momento angular de un sistema de partículas
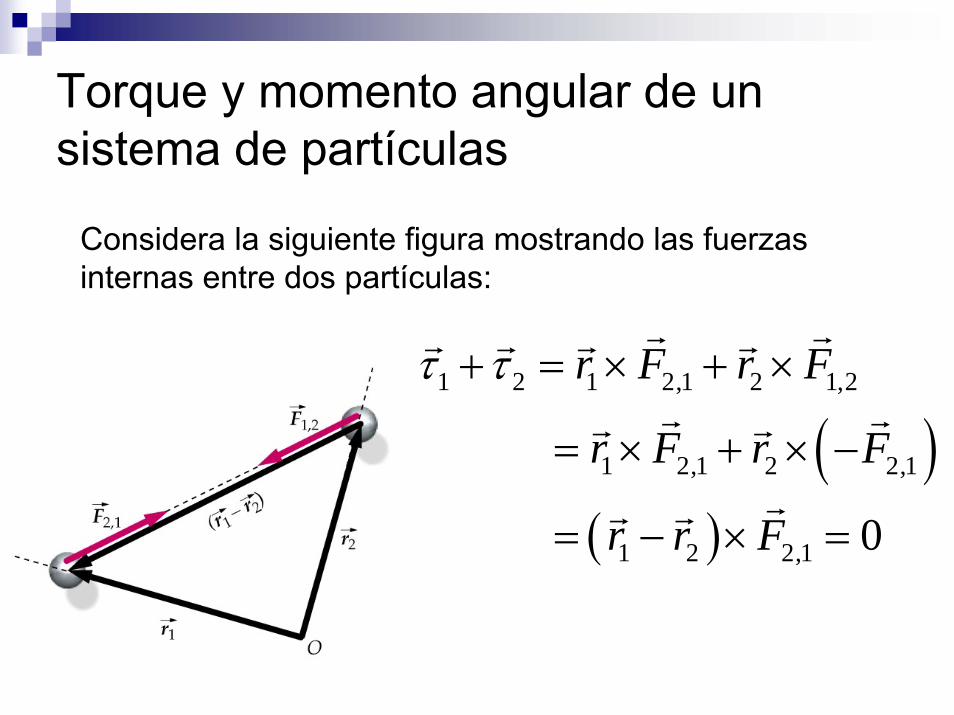
Considera la siguiente figura mostrando las fuerzas internas entre dos partículas:
( )( )
1 2 1 2,1 2 1,2
1 2,1 2 2,1
1 2 2,1 0
r F r F
r F r F
r r F
τ τ+ = × + ×
= × + × −
= − × =
Si un cuerpo rígido está rotando con respecto a un eje de simetría que pasa por el centro de masa, tenemos que
ωIL =En ese caso,
( )∑ = ωτ Idtd
ext
En el caso de un cuerpo rígido, el momento de inercia es constante. Por lo tanto, la ecuación anterior se reduce a:
( ) αωωτ IdtdII
dtd
ext ===∑
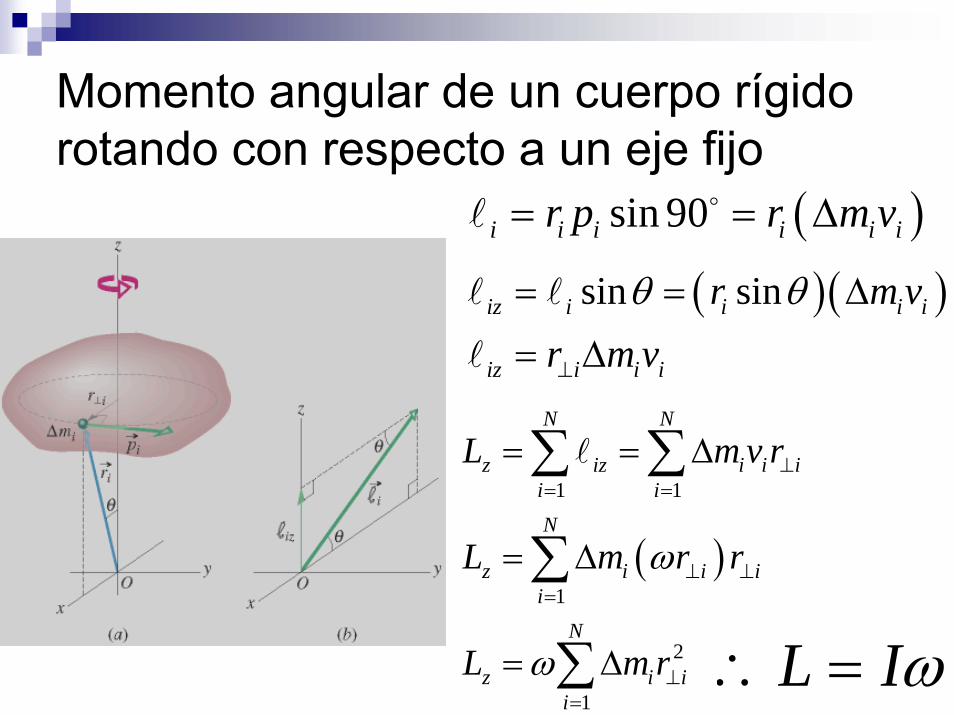
Momento angular de un cuerpo rígido rotando con respecto a un eje fijo
( )sin 90i i i i i ir p r m v= = ∆
( )( )sin siniz i i i i
iz i i i
r m vr m v
θ θ
⊥
= = ∆
= ∆
( )
1 1
1
2
1
N N
z iz i i ii iN
z i i ii
N
z i ii
L m v r
L m r r
L m r
ω
ω
⊥= =
⊥ ⊥=
⊥=
= = ∆
= ∆
= ∆
∑ ∑
∑
∑ ωIL =∴
Conservación de momento angularSi el torque resultante que actúa sobre el sistema es cero, entonces
dtLd
=0
Esto quiere decir que el momento angular no depende del tiempo.
constante=L
Ejemplo:y
x
z
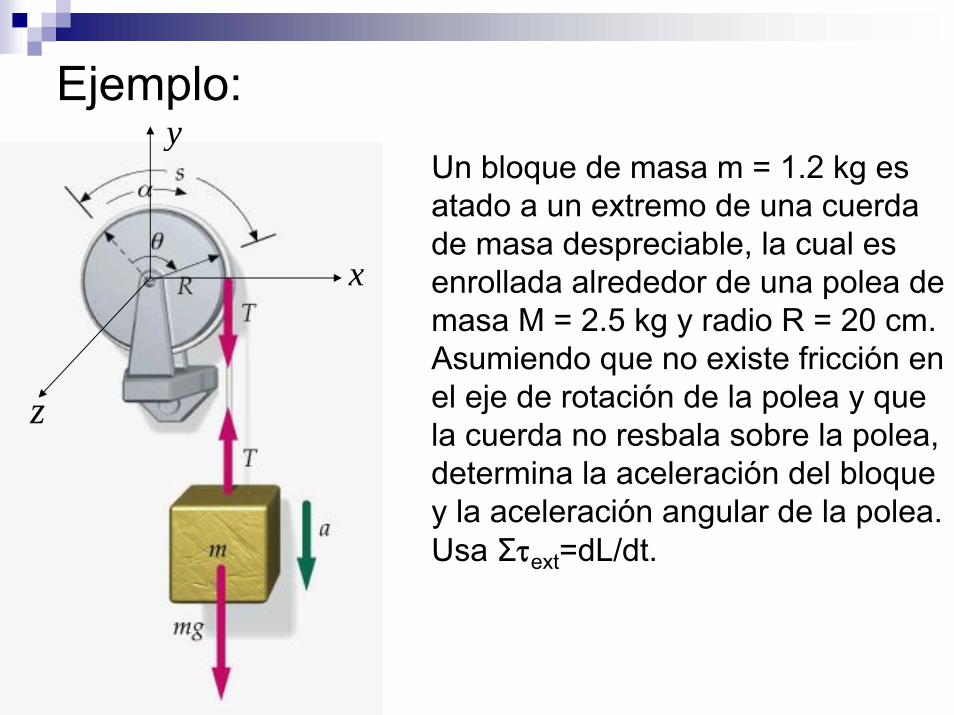
Un bloque de masa m = 1.2 kg es atado a un extremo de una cuerda de masa despreciable, la cual es enrollada alrededor de una polea de masa M = 2.5 kg y radio R = 20 cm. Asumiendo que no existe fricción en el eje de rotación de la polea y que la cuerda no resbala sobre la polea, determina la aceleración del bloque y la aceleración angular de la polea. Usa Στext=dL/dt.
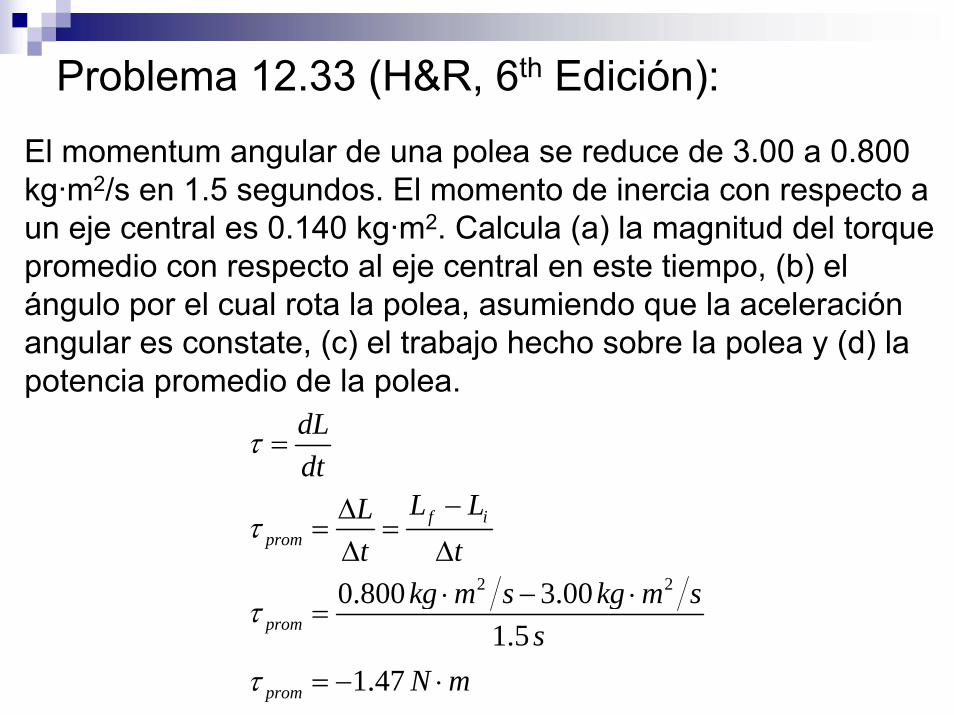
Problema 12.33 (H&R, 6th Edición):
El momentum angular de una polea se reduce de 3.00 a 0.800 kg·m2/s en 1.5 segundos. El momento de inercia con respecto a un eje central es 0.140 kg·m2. Calcula (a) la magnitud del torque promedio con respecto al eje central en este tiempo, (b) el ángulo por el cual rota la polea, asumiendo que la aceleración angular es constate, (c) el trabajo hecho sobre la polea y (d) la potencia promedio de la polea.
2 20.800 3.001.5
1.47
f iprom
prom
prom
dLdt
L LLt t
kg m s kg m ss
N m
τ
τ
τ
τ
=
−∆= =∆ ∆
⋅ − ⋅=
= − ⋅
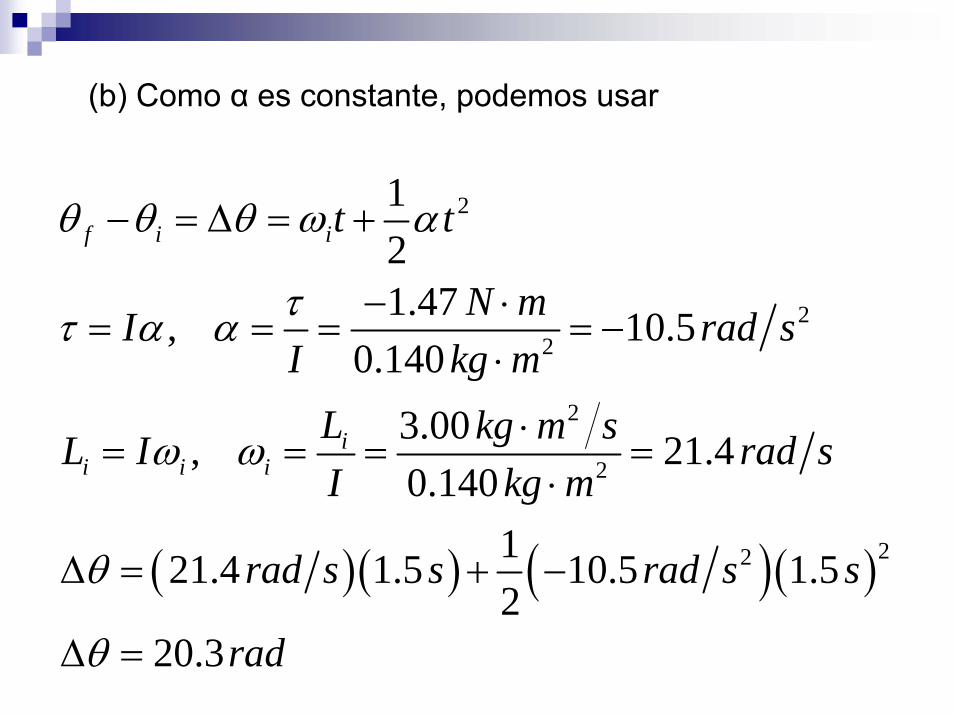
(b) Como α es constante, podemos usar
( )( ) ( )( )
2
22
2
2
22
121.47, 10.5
0.1403.00, 21.40.140
121.4 1.5 10.5 1.52
20.3
f i i
ii i i
t t
N mI rad sI kg m
L kg m sL I rad sI kg m
rad s s rad s s
rad
θ θ θ ω α
ττ α α
ω ω
θ
θ
− = ∆ = +
− ⋅= = = = −
⋅
⋅= = = =
⋅
∆ = + −
∆ =
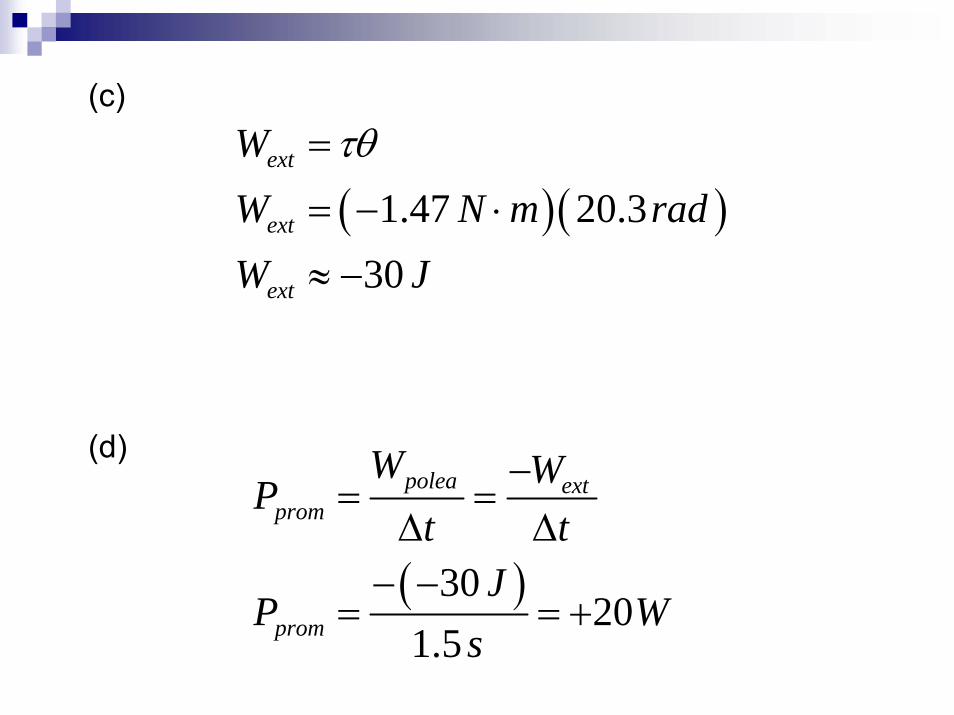
(c)
( )( )1.47 20.330
ext
ext
ext
WW N m radW J
τθ=
= − ⋅
≈ −
(d)
( )3020
1.5
polea extprom
prom
W WPt t
JP W
s
−= =
∆ ∆− −
= = +
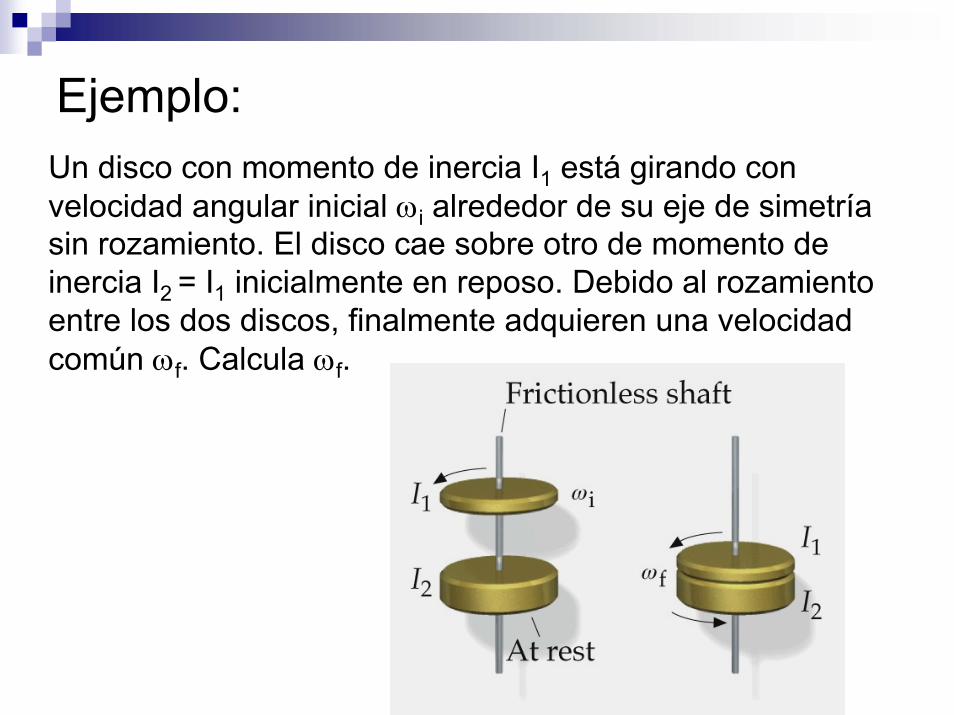
Ejemplo:Un disco con momento de inercia I1 está girando con velocidad angular inicial ωi alrededor de su eje de simetría sin rozamiento. El disco cae sobre otro de momento de inercia I2 = I1 inicialmente en reposo. Debido al rozamiento entre los dos discos, finalmente adquieren una velocidad común ωf. Calcula ωf.