Problemas - Vehículos Espacialesaero.us.es/AVE/archivos/Problemas/Problemas_Vehiculos...cuerpo...
20
Chapter 1 Problemas - Vehículos Espaciales 1.1 Problema E.1 Un satélite es puesto en órbita por un vehículo lanzador a una altitud de 1594 km con velocidad V y orientación ϕ (ϕ es el ángulo formado por el vector velocidad ~ V y el radiovector ~ r). Se pide: Calcular la ecuación de la órbita y el periodo de la misma (caso de ser cerrada) en los casos siguientes: 1. V = √ 50 km/s, ϕ = 90 ◦ . 2. V = √ 50 km/s, ϕ = 60 ◦ . 3. V = 10 km/s, ϕ = 30 ◦ . Datos: radio de la Tierra, R T =6378 km; parámetro de gravitación de la Tierra, μ =3.986 × 10 5 km 3 /s 2 . 1.1.1 Resolución del Problema E.1 El radio de la órbita viene dado por la suma del radio de la tierra, R T , más la altura a la que es puesto en órbita el satélite: r = R t + H = 6378 + 1594 = 7972km (1.1) Siendo este el primero de los problemas de mecánica orbital se desarrollaran y derivarán en más de- talles las ecuaciones que están presentes en los apuntes de clase. Este problema trata del movimiento orbital de un cuerpo de masa m sometido a la fuerza gravitatoria de otro cuerpo de masa M mucho mayor (M >> m) situado en el origen de coordenadas. Para este problema se considera que el cuerpo de masa M es la Tierra, mientras que el satélite es el cuerpo de masa m. Para obtener la ecuación de la órbita se plantea la 2ª Ley de Newton como se puede ver en la figura 1.1 La 2ª Ley de Newton nos dice que la fuerza neta aplicada sobre un cuerpo es proporcional a la aceleración que adquiere dicho cuerpo. Las aceleraciones que actúan sobre el movimiento del cuerpo sobre el plano representado en la figura 1.1 son la aceleración radial, a r , y la aceleración circunferencial, a θ , representadas por: a r = ¨ r - r ˙ θ 2 (1.2) a θ = r ¨ θ +2˙ r ˙ θ (1.3) la única fuerza que actúa sobre la masa m es la fuerza de atracción gravitatoria de M en el sentido radial la cual, viene dada por F g = μ m r 2 (1.4) 1
Transcript of Problemas - Vehículos Espacialesaero.us.es/AVE/archivos/Problemas/Problemas_Vehiculos...cuerpo...

Chapter 1
Problemas - Vehículos Espaciales
1.1 Problema E.1Un satélite es puesto en órbita por un vehículo lanzador a una altitud de 1594 km con velocidad V yorientación ϕ (ϕ es el ángulo formado por el vector velocidad ~V y el radiovector ~r). Se pide: Calcularla ecuación de la órbita y el periodo de la misma (caso de ser cerrada) en los casos siguientes:
1. V =√
50 km/s, ϕ = 90◦.
2. V =√
50 km/s, ϕ = 60◦.
3. V = 10 km/s, ϕ = 30◦.
Datos: radio de la Tierra, RT =6378 km; parámetro de gravitación de la Tierra, µ = 3.986 ×105km3/s2.
1.1.1 Resolución del Problema E.1El radio de la órbita viene dado por la suma del radio de la tierra, RT , más la altura a la que espuesto en órbita el satélite:
r = Rt +H = 6378 + 1594 = 7972km (1.1)
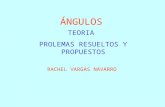
Siendo este el primero de los problemas de mecánica orbital se desarrollaran y derivarán en más de-talles las ecuaciones que están presentes en los apuntes de clase. Este problema trata del movimientoorbital de un cuerpo de masa m sometido a la fuerza gravitatoria de otro cuerpo de masa M muchomayor (M >> m) situado en el origen de coordenadas. Para este problema se considera que elcuerpo de masa M es la Tierra, mientras que el satélite es el cuerpo de masa m. Para obtener laecuación de la órbita se plantea la 2ª Ley de Newton como se puede ver en la figura 1.1
La 2ª Ley de Newton nos dice que la fuerza neta aplicada sobre un cuerpo es proporcional ala aceleración que adquiere dicho cuerpo. Las aceleraciones que actúan sobre el movimiento delcuerpo sobre el plano representado en la figura 1.1 son la aceleración radial, ar, y la aceleracióncircunferencial, aθ, representadas por:
ar = r − rθ2 (1.2)aθ = rθ + 2rθ (1.3)
la única fuerza que actúa sobre la masa m es la fuerza de atracción gravitatoria de M en el sentidoradial la cual, viene dada por
Fg = µm
r2(1.4)
1

r
θ
m
M
vr
vθ
RT
H
Figure 1.1: 2ª Ley de Newton en coordenadas polares.
por lo que las ecuaciones por unidad de masa que definen el movimiento del satélite viene dadaspor:
r − rθ2 = − µr2
(1.5)
rθ + 2rθ = 0 (1.6)
Analizando la segunda de las ecuaciones, (1.6), la cual se puede reescribir de la siguiente forma
rθ + 2rθ = 0 =⇒ 1
r
d
dt(r2θ) = 0 (1.7)
se puede deducir que r2θ =constante, ya que su derivada es igual al cero, donde
h = r2θ (1.8)
donde h es el módulo del momento cinético por unidad de masa respecto del origen de coordenadas,el cual se puede definir en forma vectorial como
~h = ~r ∧ ~V (1.9)
donde ~r es el radio vector que va del cuerpo M al cuerpo m, y ~V es el vector velocidad del satélite,o cuerpo m, cuyo módulo entre ambos vectores viene dado por
h = rV sinϕ (1.10)
donde ϕ es el ángulo formado por el vector velocidad ~V y el radio vector ~r, por lo que tenemos cuales el momento cinético por unidad de masa para una órbita específica. Ecuaciones (1.5) y (1.6), obien (1.5) y (1.8), definen las ecuaciones paramétricas de la trayectoria, r = r(t), θ = θ(θ), si bienaquí se va a analizar la ecuación explícita de la órbita, r = r(θ), en la que el tiempo t aparece deforma implícita. Utilizando la ecuación (1.8) se obtienen las siguientes relaciones
h = r2θ =⇒ dθ
dt= θ =
h
r2(1.11)
2

por lo que podemos escribir
r =dr
dt=dr
dθ
dθ
dt=dr
dθ
h
r2(1.12)
r =dr
dt=dr
dθ
dθ
dt=
d
dθ
(h
r2
dr
dθ
)h
r2(1.13)
Sustituyendo las ecuaciones (1.12) y (1.13) en (1.5) se obtiene la ecuación diferencial ordinaria
d2r
dθ2− 2
r
(dr
dθ
)2
− r =µ
h2r2 (1.14)
cuya solución proporciona la ecuación de la órbita
r =h2
µ
1
1 + e cos θ=
p
1 + e cos θ(1.15)
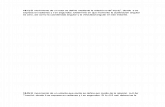
Dicha ecuación representa la ecuación focal de una cónica de excentricidad e y de parámetro p = h2
µ ,con origen de coordenadas en un foco y θ medido desde el eje focal (figura 1.2)la ecuación se puedesimplificar
3. Parabola: e=1. Se trata de una parabola de parametro p = h2
µ . En este caso p representa el doble
de la distancia del foco al periapsis.
4. Hiperbola: e >1. Ahora para cada valor de e se tiene una hiperbola (mas exactamente una rama
de la hiperbola) de excentricidad e y de parametro p = h2
µ . El semieje a y la semidistancia focal c de
la hiperbola vienen definidos por las relaciones
p = a(e2 − 1), e =c
a. (8.15)
Figura 8.2:
Energıa total
El tipo de trayectoria se puede relacionar con la energıa total del cuerpo, como se analiza a continua-
cion. La energıa total por unidad de masa es la suma de las correspondientes energıa cinetica (12V
2)
y potencial (Ug)
E =1
2V 2 − µ
r, (8.16)
siendo V 2 = r2 + r2θ2. Si se tienen en cuenta las relaciones (8.9), (8.10) y (8.13) se llega al resultado
siguiente
E =1
2
µ2
h2(e2 − 1), (8.17)
es decir, la energıa total es constante (se trata de un sistema conservativo). Notese que al ser la
energıa potencial negativa, tambien puede serlo la energıa total.
139
Figure 1.2: Geometría de las cónicas.
Para poder definir la ecuación de la órbita de cada uno de los tres casos, (1.15) hay que conocertanto la excentricidad, e, como el parámetro p. Esta primera puede obtenerse a partir de la energíatotal del cuerpo por unidad de masa, E, la cual no es otra cosa que la suma de las correspondientesenergía cinética y potencia
E =1
2V 2 − µ
r(1.16)
la cual se puede expresar en función de la excentricidad del cuerpo si se tienen en cuenta lasecuaciones (1.8), (1.12) y (1.15), llegando al resultado
E =1
2
µ2
h2(e2 − 1) (1.17)
3

de donde se puede extraer la relación que nos falta para determinar la excentricidad para cada unode los casos
e =
√1 +
2h2E
µ2(1.18)
Como la cantidad de momento cinético por unidad de masa m es constante para una determinadaórbita, veremos que para cada una de los tres casos tenemos una cantidad de momento cinéticodiferentes definidos por
1. V1 =√
50 km/s, ϕ1 = 90◦.
2. V2 =√
50 km/s, ϕ2 = 60◦.
3. V3 = 10 km/s, ϕ3 = 30◦.
por lo que tenemos que
h1 = rV1 sinϕ1 = 7972km√
50km/s sin 90 = 56370.55 km2/s
h2 = rV2 sinϕ2 = 7972km√
50km/s sin 60 = 48818.33 km2/s
h3 = rV3 sinϕ3 = 7972km10km/s sin 30 = 39860 km2/s
la energía de cada una de los tres casos viene dada por la ecuación (1.16)
E1 =1
2V 2
1 −µ
r=
1
2
√50
2 − 3.986× 105
7972= −25
km2
s2
E2 =1
2V 2
2 −µ
r=
1
2
√50
2 − 3.986× 105
7972= −25
km2
s2
E3 =1
2V 2
3 −µ
r=
1
2102 − 3.986× 105
7972= 0
km2
s2
por lo que la excentricidad de cada una de las 3 órbitas viene dada por la ecuación (1.18)
e1 =
√1 +
2h21E1
µ2= 0
e2 =
√1 +
2h22E2
µ2=
1
2
e3 =
√1 +
2h23E3
µ2= 1
y el parámetro p viene dado por
p1 =h2
1
µ= 7972km
p2 =h2
2
µ= 5979km
p3 =h2
3
µ= 3986km
con lo que se puede concluir que
• Caso 1 es una órbita circular, con e = 0 y p = r = 7972 km
• Caso 2 es una órbita elíptica, con e = 12 y p = 5979 km
• Caso 3 es una órbita parabólica, con e = 1 y p = 3986 km
4

Y se puede deducir que dadas una altura, el momento angular cinético y la velocidad en un puntode la órbita se puede determinar el tipo de órbita mediante las relaciones para la excentricidad y elparámetro p
e =
√1 +
2h2E
µ2
p =h2
µ
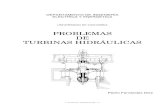
Las tres órbitas están representadas en la figura 1.3, donde se puede apreciar que a una mismaaltura el ángulo del radio vector (~r), con el ángulo del vector velocidad ~V , determina el tipo deórbita
RT
H
ϕ2V2
ϕ1V1
ϕ3V3
M
m
Figure 1.3: Geometría de las tres órbitas.
La segunda parte del problema pide que calculemos el periodo de aquellas órbitas que seancerradas, es decir, el caso 1 y caso 2. Para ellas se parte de definir la velocidad areolar como
d ~A
dt=
1
2~r ∧ ~V (1.19)
cuyo módulo viene dado por
dA
dt=
1
2r2θ =
1
2h (1.20)
por lo que el periodo viene dado por el cociente entre el área dividida entre el área de la órbita yla velocidad a la que ha barrido es decir
T =AdAdt
=πab12h
(1.21)
a partir de la ecuación que define el parámetro p = h2
µ , podemos expresar el momento cinético como
h =√pµ (1.22)
5

y utilizando que se puede representar el parámetro p en función de la geometría de la órbita cerradacomo
p =b2
a→ h =
√b2
aµ (1.23)
definimos el periodo como
T = 2π
√a3
µ(1.24)
donde a representa el semieje mayor para la órbita elíptica, y el radio para la órbita circular. Elsemieje mayor se puede calcular a partir de la ecuación de la energía de la órbita. Recordandoecuación (1.17)
E =1
2
µ2
h2(e2 − 1)
y que los semiejes de la elipse viene definidos por las relaciones
p = a(1− e2) =b2
a
e =
√1−
(b
a
)2
p =h2
µ
o de forma más simplificada:
r =p
1 + e cos θ
a =rp + ra
2
rp =p
1 + e
ra =p
1− epor lo que tenemos que
E =1
2
µ2
h2(
√
1−(b
a
)2
2
− 1) = −1
2
µ2
h2
(b
a
)2
= −1
2
µ
p
(b
a
)2
= −1
2µa
b2
(b
a
)2
E = − µ
2a
lo que se simplifica a que la energía se puede representar como
E = − µ
2a→ a = − µ
2E
por lo que los semiejes de la órbita circular y la elíptica son:
a1 = − µ
2E1= r = 7972 km
a2 = − µ
2E2= 7972 km
por lo que los periodos son
T1 = 2π
√a3
1
µ= 7083.73 segundos ≈ 1 hr.58 mints (1.25)
T2 = 2π
√a3
2
µ= 7083.73 segundos ≈ 1 hr.58 mints (1.26)
6

1.2 Problema E.2Un satélite es puesto en órbita por un vehículo lanzador en un punto de latitud 27◦ situado a 800km de la superficie terrestre. En el punto de inyección la velocidad es V =9 km/s en direcciónNorte y formando un ángulo de 3◦ sobre el plano horizontal local. Se pide:
1. Calcular la ecuación de la órbita.
2. Orientarla respecto de la Tierra (dando el ángulo formado por el eje focal y el ecuador).
3. Calcular las distancias al perigeo (rp) y al apogeo de la órbita (ra).
Datos: radio de la Tierra, RT =6378 km; parámetro de gravitación de la Tierra, µ = 3.986 ×105km3/s2. El radio de la órbita viene dado por la suma del radio de la tierra, RT , más la alturaa la que es puesto en órbita el satélite:º
1.2.1 Resolución del Problema E.2
r = Rt +H = 6378 + 800 = 7178 km (1.27)
el ángulo formado por el vector velocidad ~V y el radio vector ~r, viene dado por ϕ = 87◦por lo quetenemos cual es el momento cinético por unidad de masa para dicha órbita a partir de
h = rV sinϕ = 6.451× 104 km2/s (1.28)
la energía de la órbita se obtiene a partir de
E =1
2V 2 − µ
r= −15.03
km2
s2
por lo que la excentricidad de la órbita se puede calcular como
e =
√1 +
2h2E
µ2= 0.4610 (1.29)
por lo que la órbita del satélite es elíptica, y el parámetro p viene dada por
p =h2
µ= 10440 km (1.30)
lo que define la ecuación de la órbita
r =p
1 + e cos θ(1.31)
Se puede observar rápidamente que si substituimos por θ = 0 obtendremos la distancia alperigeo. Si esta coincide con la altura de inyección del satélite, eso implicaria que la inyección seha producido en el perigeo de la órbita, por lo que se resuelve la ecuación de la órbita para unaanomalia verdadera θ = 0◦, lo que se correspondería a la trayectoria en trazo punteado (color verde)que se observa en la Figura 1.5:
r =p
1 + e cos θ=
10440
1 + (0.461) cos 0= 7146, 132Km
Por lo que se puede observar que el punto de inserción no se corresponde con el perigeo de laórbita. La orientación respecto de la tierra viene dada por resolver el ángulo de barrido tal comose observa en las figura (1.5). La orientación respecto de la tierra viene dada por resolver el ángulode barrido tal como se observa en las figuras (1.4) y (1.5)
7

RT
H
ϕ = 87º
V
Plano meridional
p
3º
27º
λN
Ecuador
Plano horizontal local
Figure 1.4: Plano meridional del satélite.
Hay varias maneras de obtener la orientación de la orbita con respecto a la tierra, siendo lamás fácil, obtenerla a partir de la ecuación de la órbita. Dado que tenemos la magnitud del radiovector (la altura de inyección), la ecentricidad y la energía de la órbita entonces podemos obtenerla anomalía:
r =p
1 + e cos θ=⇒ cos θ =
(pr− 1) 1
e= 0.9858 (1.32)
θ = 9.7◦ (1.33)
Lo que significa que en el punto de inyección la órbita de la trayectoria ya tiene una anomalia de9, 7◦, lo que se puede observar en la trayectoria de trazos discontinuos (color rojo), por lo que sepuede obtener que la orientación de la órbita con respecto de la tierra viene dada por
ψ = 27◦ − θ = 17.3◦
quiere decir que la linea que une el perigeo con el apogeo de la orbita esta alineada con la línea delatitud 17, 3◦
8

r
V
θψ
3º 24º
Ecuador
Figure 1.5: Plano orbital del satélite.
1.3 Problema E.3Un satélite es puesto en órbita por un vehículo lanzador a una altitud de 1594 km con velocidadV =
√50 km/s, siendo θ = 120◦ el ángulo formado por el eje focal de la órbita y el radiovector ~r
del punto de inyección en órbita. Se pide:
1. Calcular la energía del satélite.
2. Calcular el parámetro k = 1 +2E
µr correspondiente al punto de inyección en órbita.
3. Calcular los parámetros geométricos p y e de las posibles órbitas. (Se recomienda eliminar pen el sistema de dos ecuaciones que definen a p y e y resolver la ecuación resultante para e.)
4. Calcular el ángulo ϕ formado por el vector velocidad ~V y el radiovector ~r correspondiente alpunto de inyección en órbita.
Datos: radio de la Tierra, RT =6378 km; parámetro de gravitación de la Tierra, µ = 3.986 ×105km3/s2. Nota: las relaciones entre los parámetros geométricos de la órbita (p y e) y los físicos(h y E) son:
p =h2
µ
e =
√1 +
2Eh2
µ2
1.3.1 Resolución del Problema E.3Figura 1.6 representa el problema arriba descrito
9

r
ϕ1
V
θ
ϕ2
ϕ1
rpc
rpc
Figure 1.6: Plano meridional del satélite.
Apartado 1
El radio de la órbita viene dado por la suma del radio de la tierra, RT , más la altura a la que espuesto en órbita el satélite:
r = Rt +H = 7972 km (1.34)
la energía de la órbita viene dada por la ecuación
E =1
2V 2 − µ
r= −25
km2
s2
Apartado 2
El parámetro k es
k = 1 +2E
µr = 1 +
2(−25km2
s2 )
3.986× 105km3/s27972km = 0
Apartado 3
Para el cálculo de los parámetros geométricos p y e de las posibles órbitas se recomienda eliminar pen el sistema de dos ecuaciones que definen a p y e y resolver la ecuación resultante para e, dondevienen dados por las relaciones
r =p
1 + e cos θ
e =
√1 +
2Eh2
µ2
donde la primera relación se puede expresar como
r =p
1 + e cos θ→ p = r(1 + e cos θ)
10

dicha relación se puede substituir en la ecuación que define la excentricidad en función de la energía
e2 = 1 +2Eh2
µ2=⇒ e2 = 1 +
2E
µp = 1 +
2E
µr(1 + e cos θ)
la cual se puede reescribir como
e2 − 2E
µr cos θe−
(1 +
2E
µr
)= 0
donde el segundo término se observa que es el término k obtenido en el apartado 2, por lo que setiene que
k = 1 +2E
µr = 0
e2 − 2E
µr cos θe−
(1 +
2E
µr
)= e2 − 2E
µr cos θe = 0
por lo que se puede observar que existen dos soluciones para la excentricidad definidas por
e = 0
e = − cos θ
la segunda teniendo en cuenta que como dato del problema se nos da la anomalia verdaderaθ = 120◦entonces tenemos que las dos soluciones son
e=0
e = − cos θ = − cos 120◦ =1
2por lo que ahora podemos expresar p en función de la excentricidad y la energía a partir de
e =
√1 +
2Eh2
µ2=
√1 +
2E
µp =⇒ p =
µ
2E(e2 − 1)
por lo que tenemos que para
• e = 0→ p = − µ2E = 7972 km → órbita circular
• e = − cos θ = 12 → p = − µ
2E34 = 5979 km → órbita elíptica
Apartado 4
La cantidad de momento cinético se define como
h = rV sinϕ (1.35)
utilizando esta relación junto con las relaciones entre la cantidad de momento cinético en funcióndel parámetro p y la relación entre el parámetro p y la energía y la excentricidad podemos escribir
p = h2
µ
p = µ2E (e2 − 1)
→ h = rV sinϕ→ sinϕ =h2
rV=
√pµ
rV=
µ
rV
√e2 − 1
2E
por lo que tenemos que para
• e = 0→ sinϕ = 1→ ϕ = 90◦
• e = 12 → sinϕ =
√3
2 → ϕ = 60◦
11

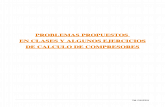
1.4 Problema E.4Se considera el lanzamiento de un cohete de sondeo, tal y como se indica en la figura 1.7. Debido ala gran altura que alcanzan estos cohetes, su movimiento se estudia mediante Mecánica Orbital (aligual que el de los vehículos espaciales). En este caso, se considera que la fuerza gravitatoria queactúa sobre el cohete está concentrada en el centro de la Tierra.
La trayectoria que sigue el cohete es una elipse cuyo apogeo coincide con el punto más alto, ycuyo perigeo está en el interior de la Tierra.
Problema E.4
Se considera el lanzamiento de un cohete de sondeo, tal y como se indica en la figura. Debido a
la gran altura que alcanzan estos cohetes, su movimiento se estudia mediante Mecanica Orbital (al
igual que el de los vehıculos espaciales). En este caso, se considera que la fuerza gravitatoria que actua
sobre el cohete esta concentrada en el centro de la Tierra.
La trayectoria que sigue el cohete es una elipse cuyo apogeo coincide con el punto mas alto, y cuyo
perigeo esta en el interior de la Tierra.
Punto de lanzamiento
Perigeo
Apogeo
H
r =R
V0
0
φR
0
Tierra
γ
Considerando que la velocidad inicial del cohete en el momento del lanzamiento es V0, y que forma
un angulo γ0 con la horizontal local, se pide:
1) Calcular los parametros geometricos de la elipse e y p. Expresar e en funcion de los parametros
λ = V 20
µ/R y γ0, y p en funcion de R, λ, y γ0.
2) Obtener la anomalıa verdadera θ0 del punto de lanzamiento (en funcion de λ y γ0) y el alcance
del cohete Rφ.
3) Calcular la altura maxima H en funcion de R, λ y γ0.
4) Particularizar los resultados anteriores para el caso λ = 1 y γ0 = 45o.
Nota: las relaciones entre los parametros de la orbita (p y e) y los fısicos (h y E) son p = h2
µ y
e =√
1 + 2Eh2
µ2 . La ecuacion de una orbita elıptica es r = p1+e cos θ .
162
Figure 1.7: Plano meridional del satélite.
Considerando que la velocidad inicial del cohete en el momento del lanzamiento es V0, y queforma un ángulo γ0 con la horizontal local, se pide:
1. Calcular los parámetros geométricos de la eclipse e y p. Expresar e en función de los parámet-
ros λ =V 2
0
µ/R, γ0, y p, en función de R,λ, y γ0
2. Obtener la anomalia verdadera θ0 del punto de lanzamiento (en función de λy γ0) y el alcancedel cohete Rφ.
12

3. Calcular la altura máxima H en función de R, λ y γ0.
4. Particularizar los resultados anteriores para el caso λ = 1 y γ0 = 45◦ .
Nota: las relaciones entre los parámetros de la órbita (p y e) y los físicos (h y E) son p =h2
µy
e =
√1 +
2Eh2
µ2. La ecuación de una órbita elíptica es r =
p
1 + e cos θ
1.4.1 Resolución del Problema E.4Apartado 1
Para el cálculo de e y p se necesita primero conocer E y h :
E =1
2V 2
0 −µ
R=
1
2V 2
0 −µ
r0(1.36)
h =∣∣∣~r0 × ~V0
∣∣∣ = RV0 sin(π
2− γ0
)= RV0 cos γ0 (1.37)
e =
√2h2E
µ2+ 1 =
√√√√2R2V 20 cos2 γ0
(V 2
0
2 −µR
)
µ2+ 1 =
√√√√1 +
[(V 2
0
µ/R
)2
− 2V 2
0
µ/R
]cos2 γ0(1.38)
=√
1 + (λ2 − 2λ) cos2 γ0 (1.39)
p =h2
µ=R2V 2
0 cos2 γ0
µ= Rλ cos2 γ0 (1.40)
Apartado 2
De la ecuación de la órbita particularizada en el punto de lanzamiento, se obtiene
R =p
1 + e cos θ0→ θ0 = arccos
[1
e
( pR− 1)]
(1.41)
Después de operar, se obtiene
θ0 = arccos
[λ cos2 γ0 − 1√
1 + cos2 γ0 (λ2 − 2λ)
](1.42)
y el alcance se obtiene como
Rφ = R (2π − 2θ0) = 2RT
[π − arccos
(λ cos2 γ0 − 1√
1 + cos2 γ0 (λ2 − 2λ)
)](1.43)
Apartado 3
La altura máxima se obtiene como la diferencia entre el radio vector del apogeo y el radio terrestre:
H = r[ap] −R =p
1− e −R =Rλ cos2 γ0
1−√
1 + (λ2 − 2λ) cos2 γ0
−R = Rλ− 1 +
√1 + (λ− 2)λ cos2 γ0
2− λ (1.44)
Apartado 4
Para λ = 1 y γ0 = 45◦, se obtiene:
e =
√2
2, p =
R
2, θ0 = 135◦ =
3π
4, Rφ =
πR
2, H =
√2R
2(1.45)
13

1.5 Problema E5Se desea situar un satélite en órbita geoestacionaria desde el Space Shuttle. Se supone que laórbita del Shuttle es circular, a 300 km de altura sobre la superficie terrestre y situada en el planoecuatorial. Se pide:
1. Calcular los impulsos ∆V1 y ∆V2 necesarios para efectuar una transferencia de Hohmann.
2. Calcular el tiempo de vuelo empleado en la transferencia.
3. Determinar la carga útil (masa total del satélite sin combustible necesario para realizar lasmaniobras), si se utilizan tres tipos de combustibles con diferentes Isp diferentes. La cargamáxima que la lanzadera puede poner en órbita es una carga total de 500 kg (masa utill másmasa del combustible). Isp1 = 100 m/seg., Isp2 = 500 m/seg. y Isp3 = 5000 m/seg.
Datos: radio de la Tierra, RT =6378 km; parámetro de gravitación de la Tierra, µ = 3.986 ×105km3/s2, radio de la órbita geoestacionaria, RG=42164 km.
1.5.1 Resolución del Problema E.5Figura 1.8 representa la transferencia de un satélite mediante una transferencia de Hohmann arribadescrita
ri
rf
A
B
Figure 1.8: Transferencia Hohmann.
14

Apartado 1
Primero hay que calcular los diferentes radios de las dos órbitas circulares. La órbita inicial tieneun radio de
ri = RT + 300 = 6678 km (1.46)
mientras que la órbita final (geostacionaria) es
rf = RG = 42164 km (1.47)
La velocidad inicial del satélite en el punto A, el cual se corresponde con la velocidad desatelización (órbita circular) con radio igual al radio inicial (ri) viene dada por
Vi =
õ
ri= 7.726 km/s (1.48)
mientras que la velocidad necesaria para poder incorporarse a la órbita elíptica en el periapsis dela órbita elíptica (punto A) cuya distancia focal es igual al ri, y cuyo semieje mayor es igual aa = 1
2 (ri + rf ) viene dada por la ecuación que define la velocidad en cualquier punto de una órbitaelíptica:
VA =
õ
(2
r− 1
a
)=
õ
(2a− rra
)=
õ
(2 (ri + rf )− 2r
r (ri + rf )
)=
√2µ (ri + rf − r)r (ri + rf )
(1.49)
por lo que en el periapsis de la órbita elíptica de transferencia la velocidad es
VA =
õ
(2
r− 1
a
)∣∣∣∣∣r=ri
=
√2µ (ri + rf − r)r (ri + rf )
∣∣∣∣∣r=ri
=
√2µrf
ri (ri + rf )= 10, 1516 km/s (1.50)
por lo que se observa que el el primer impulso (∆V1) para pasar de la órbita circular en la que seencuentra el transbordador Space Shuttle, a una órbita elíptica con punto focal que se encuentra enla tierra, cuyo periapsis es tangente a la orbita circular inicial, y el apoapsis se encuentra tangentea una órbita geostacionaria final, viene dado por
∆V1 = VA − Vi = 2, 4256 km/s (1.51)
ahora es necesario calcular el impulso necesario para completar la transferencia de Hohmann. Paraello hay que calcular la velocidad a la que llega el satélite cuando la órbita elíptica es tangente a laórbita geostacionaria, es decir cuando el satélite esta en su apoapsis, la cual viene dada por
VB =
õ
(2
r− 1
a
)∣∣∣∣∣r=rf
=
√2µ (ri + rf − r)r (ri + rf )
∣∣∣∣∣r=rf
=
√2µri
rf (ri + rf )= 1, 5895 km/s (1.52)
y la velocidad final del satélite en el punto B, el cual se corresponde con la velocidad de satelización(órbita circular) con radio igual al radio final (rf = RG) viene dada por
Vf =
õ
rf= 3, 0746 km/s (1.53)
por lo que se observa que el el segundo impulso (∆V2) para pasar de la órbita elíptica de transferenciaa la órbita de satelización geostacionaria final, viene dado por
∆V2 = Vf − VB = 1, 4851 km/s (1.54)
Por lo que el impulso final total viene dado por la suma de los dos impulsos
∆V = ∆V1 + ∆V2 = 3, 9107 km/s (1.55)
15

Apartado 2
El tiempo de vuelo viene dado por el tiempo en el que el satélite está en la órbita elíptica, el cuales la mitad del tiempo del periodo de dicha órbita elíptica. El periodo de una órbita cerrada vienedado por:
T = 2π
√a3
µ(1.56)
por lo que el tiempo de vuelo es
t =T
2= π
√a3
µ= π
√(12 (ri + rf )
)3
µ= 18815.388 s ≈ 5.22 h (1.57)
Apartado 3
El incremento de la velocidad generado por un motor cohete viene dado por:
∆V = Isplnm1
mf
donde Isp es el impulso específico, y mi y mf son las masas inicial y final del vehículo respecti-vamente, de manera que la diferencia mi −mf es la masa de propulsante utilizada en la maniobra.Para multimples impulsos, (∆V1,∆V2,...,∆Vn ) se puede demostrar que:
∆V = Isplnm0
mn
donde m0 es la masa total al principio de la maniobra, y mn la masa total al final de la maiobrauna vez consumido todo el combustible. por lo que se puede rescribir para obtener cual es la masaen seco (sin combustible):
∆V = Isplnm0
m2→ ms = m2 = m0e
−∆VIsp
por lo que se puede observar que:
Isp1= 100m/seg → ms = m2 = m0e
− ∆VIsp1 = 480, 823kg
Isp2= 500m/seg → ms = m2 = m0e
− ∆VIsp2 = 496, 104kg
Isp3= 5000m/seg → ms = m2 = m0e
− ∆VIsp3 = 499, 609kg
por lo que el combustible empleado para cada una de los diferentes Ispviene dada por:
mf1= 19, 176kg
mf2= 3, 895kg
mf3= 0, 391kg
por lo que se observa la cantidad de combustible (mf ) necesaria a medida que se aumenta el Ispes menor, y por lo tanto mayor la carga útil que puede ser lanzada.
16

1.6 Problema E10Se considera una transferencia bielíptica en la que se pasa de una órbita circular inicial de radio ria otra órbita circular final de radio rf > ri, mediante dos trayectorias semielípticas definidas por elradiovector rt tal y como se indica en la figura 1.9. Se pide:
1. Calcular el impulso ∆V1, dado tangencialmente a la órbita circular inicial en el punto 1,necesario para pasar a la primera órbita elíptica.
2. Calcular el impulso ∆V2, dado tangencialmente a la primera órbita elíptica en su apoapsis,punto 2, necesario para pasar a la segunda órbita elíptica.
3. Calcular el impulso ∆V2, dado tangencialmente a la segunda órbita elíptica en su periapsis,punto 3, necesario para pasar a la órbita circular final.
4. Calcular∆V
Visiendo ∆V el impulso total necesario para efectuar la transferencia y Vi la
velocidad inicial correspondiente a la órbita circular inicial.
5. Calcular limrt→∞∆VVi
y particularizar para el valor de este límite para el caso rf = 2ri.
Figure 1.9: Transferencia Bielíptica.
1.6.1 Resolución del Problema E.10
1.6.2 Apartado 1Para órbitas cerradas tenemos que la velocidad en cualquier punto de la órbita viene dadao a partirde:
p = h2
µ
p = a(1− e2
) → E =1
2
µ2
h2(e2 − 1) = E =
1
2
µ
p(e2 − 1) =
1
2
µ
p(1− p
a− 1) = − µ
2a
17

E = − µ2a
E = V 2
2 −µr
→ V =
õ
(2
r− 1
a
)
para la órbita elíptica tenemos que
a =1
2(rA + rP )→ V =
õ
(2
r− 1
a
)
=
õ
(2
r− 2
(rA + rP )
)=
√2µ
r
(1− r
rA + rP
)=
√2µ (rA + rP − r)r (rA + rP )
y para la órbita circular tenemos que
a = r → V =
õ
(2
r− 1
a
)=
õ
r(1.58)
La velocidad inicial del satélite en el punto 1, el cual se corresponde con la velocidad de satelización(órbita circular) con radio igual al radio inicial (ri) viene dada por:
Vi1 =
õ
ri= Vi (1.59)
mientras que la velocidad necesaria para poder incorporarse a la órbita elíptica en el periapsis(rP ) de la órbita elíptica (punto 1) cuya distancia focal es igual al ri, y cuyo semieje mayor es iguala a1 = 1
2 (rP + rA) = 12 (ri + rt) viene dada por (donde rP = riy rA = rt)
Vfi =
√2µ (rA + rP − r)r (rA + rP )
∣∣∣∣∣r=ri
=
√2µ (ri + rt − r)r (ri + rt)
∣∣∣∣∣r=ri
=
√2µ
ri
(rt
ri + rt
)(1.60)
por lo que se observa que el el primer impulso (∆V1)para pasar de la órbita circular inicial a unaórbita elíptica cuyo punto focal se encuentra en el radio inicial (ri) de la órbita circular viene dadopor
∆V1 = Vfi − Vi1 =
√2µ
ri
(rt
ri + rt
)−√µ
ri=
õ
ri
(√2rt
ri + rt− 1
)
= Vi
(√2rt
ri + rt− 1
)
1.6.3 Apartado 2La segunda transferencia se produce en el punto 2, donde la velocidad a la que llega el satelite vienedada por la velocidad en el apoapsis de la órbita elíptica cuya distancia focal es igual al ri, y cuyosemieje mayor es igual a a = 1
2 (ri + rf ) y viene dada por:
Vi2 =
√2µ (rA + rP − r)r (rA + rP )
∣∣∣∣∣r=rt
=
√2µ (ri + rt − r)r (ri + rt)
∣∣∣∣∣r=rt
=
√2µ
rt
riri + rt
la velocidad que se le quiere proporcionar al satelite en el punto 2 es la velocidad necesaria parapoder incorporarse a la órbita elíptica en el apoapsis de la órbita elíptica (punto 2) cuya distanciafocal es igual al rf , y cuyo semieje mayor es igual a a = 1
2 (rf + rt) viene dada por:
Vf2 =
√2µ (rA + rP − r)r (rA + rP )
∣∣∣∣∣r=rt
=
√2µ (rt + rf − r)r (rt + rf )
∣∣∣∣∣r=rt
=
√2µ
rt
rfrf + rt
18

por lo que se observa que el el segundo impulso (∆V2)para pasar de la órbita elíptica inicial ala segunda órbita elíptica cuyo punto focal se encuentra en el radio final de la órbita circular vienedado por:
∆V2 = Vf2 − Vi2 =
√2µ
rt
rfrf + rt
−√
2µ
rt
riri + rt
=
õ
ri
(√2rirt
rfrt + rf
−√
2rirt
riri + rt
)
= Vi
(√2rirt
rfrt + rf
−√
2rirt
riri + rt
)
1.6.4 Apartado 3La tercera y última transferencia se produce en el punto 3, donde la velocidad a la que llega elsatelite viene dada por la velocidad en el periapsis de la órbita elíptica cuya distancia focal es igualal rf , y cuyo semieje mayor es igual a a = 1
2 (rt + rf ) y viene dada por
Vi3 =
√2µ
r
(1− r
rt + rf
)∣∣∣∣∣r=rf
=
√2µ (rt + rf − r)r (rt + rf )
∣∣∣∣∣r=rf
=
√2µ
rf
rtrf + rt
la velocidad que se le quiere proporcionar al satelite en el punto 3 es la velocidad necesaria parapoder incorporarse a la órbita circular con radio rf ,y viene dada por
Vf3=
õ
rf
por lo que se observa que el el tercer impulso (∆V3)para pasar de la segunda órbita elíptica órbitacircula final viene dado por:
∆V3 = Vf3− Vi3 =
õ
rf−√
2µ
rf
rtrf + rt
=
õ
ri
(√rirf−√
2rirf
rt(rt + rf )
)
= Vi
(√rirf
(1−
√2rt
rt + rf
))
Observando este último resultado se puede observar que si rt > rf entonces ∆V3 es decelerante,es decir en la dirección opuesta al movimiento del satelite para reducir su velocidad por lo que seha de expresar como:
∆V3 = Vi
(√rirf
(√2rt
rt + rf− 1
))
1.6.5 Apartado 4La suma de los impulsos viene dada por:
∆V = ∆V1 + ∆V2 + ∆V3
∆V = Vi
(√2rt
ri + rt− 1 +
√2rirt
rfrt + rf
−√
2rirt
riri + rt
+
√rirf
(√2rt
rt + rf− 1
))
por lo que
∆V
Vi=
√2rt
ri + rt− 1 +
√2rirt
rfrt + rf
−√
2rirt
riri + rt
+
√rirf
(√2rt
rt + rf− 1
)
19

1.6.6 Apartado 5Para calcular el limrt→∞
∆VVi
y particularizar para el valor de este límite para el caso rf = 2ritenemosque:
limrt→∞
∆V
Vi=√
2− 1 + 0 + 0 +
√2rirf−√rirf
=(√
2− 1)(
1 +
√rirf
)
donde si particularizamos para rf = 2ri entonces tenemos que
limrt→∞
∆V
Vi=(√
2− 1)(
1 +
√rirf
)∣∣∣∣rf=2r1
=(√
2− 1)(
1 +
√ri2ri
)=
1√2
20