I primi passi della geometria...
21
I primi passi della geometria birazionale Enrico Rogora 21 dicembre 2014 1 Le trasformazioni birazionali Trasformazioni razionali del piano Una trasformazione razionale del piano proiettivo φ : P 2 99K P 2 ` e una trasformazione del tipo (x 0 ,x 1 ,x 2 ) 99K (F 0 (x 0 ,x 1 ,x 2 ),F 1 (x 0 ,x 1 ,x 2 ),F 2 (x 0 ,x 1 ,x 2 )) dove F 0 , F 1 , F 2 sono tre polinomi omogenei dello stesso grado, che assumiamo linearmente indipendenti. Il punto generico dell’immagine ha al pi` u n 2 controimmagini. Infatti, supponiamo che (λ 0 ,λ 1 ,λ 2 ) appartenga all’immagine di φ e sia s = λ 1 /λ 0 e t = λ 2 /λ 0 . Un punto (y 0 ,y 1 ,y 2 ) sta nella controimmagine di (λ 0 ,λ 1 ,λ 2 ) se ` e soluzione del sistema F 1 (y 0 ,y 1 ,y 2 ) - sF 0 (y 0 ,y 1 ,y 2 ) = 0 F 2 (y 0 ,y 1 ,y 2 ) - tF 0 (y 0 ,y 1 ,y 2 ) = 0 senza essere contemporaneamente soluzione del sistema F 0 (y 0 ,y 1 ,y 2 ) = 0 F 1 (y 0 ,y 1 ,y 2 ) = 0 F 2 (y 0 ,y 1 ,y 2 ) = 0 Le soluzioni del primo sistema sono le intersezioni di due curve di grado n, quindi per il teorema di Bezout sono n 2 . A queste, per determinare la fibra della trasformazione razionale sopra al punto generico dell’immagine, vanno tolte le soluzioni del secondo sistema, che definisce il luogo base della trasformazione, dove la trasformazione non ` e definita. ` E possibile associare ad una mappa razionale una utile interpretazione geometrica, che risulter`a particolarmente efficace per studiare le trasforma- zioni birazionali. Consideriamo la rete di curve Φ definita dalle equazioni 1
Transcript of I primi passi della geometria...

I primi passi della geometria birazionale
Enrico Rogora
21 dicembre 2014
1 Le trasformazioni birazionali
Trasformazioni razionali del piano Una trasformazione razionale delpiano proiettivo φ : P2 99K P2 e una trasformazione del tipo
(x0, x1, x2) 99K (F0(x0, x1, x2), F1(x0, x1, x2), F2(x0, x1, x2))
dove F0, F1, F2 sono tre polinomi omogenei dello stesso grado, che assumiamolinearmente indipendenti.
Il punto generico dell’immagine ha al piu n2 controimmagini. Infatti,supponiamo che (λ0, λ1, λ2) appartenga all’immagine di φ e sia s = λ1/λ0 et = λ2/λ0. Un punto (y0, y1, y2) sta nella controimmagine di (λ0, λ1, λ2) se esoluzione del sistema{
F1(y0, y1, y2)− sF0(y0, y1, y2) = 0F2(y0, y1, y2)− tF0(y0, y1, y2) = 0
senza essere contemporaneamente soluzione del sistemaF0(y0, y1, y2) = 0F1(y0, y1, y2) = 0F2(y0, y1, y2) = 0
Le soluzioni del primo sistema sono le intersezioni di due curve di gradon, quindi per il teorema di Bezout sono n2. A queste, per determinare lafibra della trasformazione razionale sopra al punto generico dell’immagine,vanno tolte le soluzioni del secondo sistema, che definisce il luogo base dellatrasformazione, dove la trasformazione non e definita.
E possibile associare ad una mappa razionale una utile interpretazionegeometrica, che risultera particolarmente efficace per studiare le trasforma-zioni birazionali. Consideriamo la rete di curve Φ definita dalle equazioni
1

λF0 + µF1 + νF2. Se P descrive una curva Φ del fascio, T (P ) descrive unaretta e quindi la rete delle curve Φ e la controimmagine del sistema lineare ditutte le rette del piano. Il grado di una rete Φ e il numero delle intersezionidi due curve generali di Φ, fuori dal luogo base. Il grado della rete e quindiil numero delle controimmaginI di un punto.
Definizione Una rete di curve piane si dice omaloide se ha grado uno.
Una rete omaloide determina una trasformazione birazionale. Si noti cheuna trasformazione birazionale del piano non e una trasformazione biunivocasu tutto il piano. Lo diventa togliendo al dominio e al codominio l’unionedi un numero finito di curve. In una trasformazione omaloide le rette deldominio si trasformano in particolari curve di grado n del condominio, doven e l’ordine della rete, cioe il grado delle curve della rete.
La trasformazione quadratica L’esempio piu semplice di trasformazionebirazionale, a parte le proiettivita, e la trasformazione quadratica, studiataper la prima volta da Poncelet. Sia
φ : P2 99K P2
l’applicazione razionale definita dai polinomi F0 = x1x2, F1 = x0x1, F2 =x0x1.
Fuori dai triangoli x0x1x2 = 0 la trasformazione e biiettiva. Inoltre con-trae la retta x0 = 0 sul punto (1, 0, 0), la retta x1 = 0 sul punto (0, 1, 0) ex2 = 0 su (0, 0, 1). Vicevresa, la trasformazione scoppia il punto (1, 0, 0) sullaretta x0 = 0, nel senso che il punto (1, αt, βt) viene trasformato nel punto(αβt, β, α) e quindi, quando t tende a zero, nel punto (0, α, β). I punti dellaretta x0 = 0 rappresentano quindi l’intorno infinitesimo del primo ordine delpunto (1, 0, 0), dove la trasformazione non e definita.
Questa trasformazione risulta essere molto utile per studiare le singolaritadelle curve piane. Se una curva ha un punto singolare in (1, 0, 0), la suaimmagine attraverso la trasformazione ha singolarita piu semplici. Iterandola trasformazione e possibile trasformare una curva piana qualsiasi in unacurva dotata di soli punti multipli ordinari, cioe a tangenti principali distinte.
Estratto da Cremona: sulle trasformazioni geometriche delle curvepiane, 1864
I signori Magnus e Schiaparelli, l’uno nel tomo 8.◦ del giornaledi Crelle, l’altro in un recentissimo volume delle Memorie dell’Ac-cademia scientifica di Torino, cercarono le formole analitiche perla trasformazione geometrica di una figura piana in un’altra pur
2

piana, sotto la condizione che ad un punto qualunque dell’unacorrisponda un sol punto nell’altra, e reciprocamente a ciascunpunto di questa un punto unico di quella (trasformazione di pri-mo ordine). E dall’analisi de’ citati autori sembrerebbe doversiconcludere che, nella piu generale ipotesi, alle rette di una figuracorrispondono nell’altra coniche circoscritte ad un triangolo fis-so (reale o no); ossia che la piu generale trasformazione di primoordine sia quella che lo Schiaparelli appella trasformazione conica.
Ma egli e evidente che applicando ad una data figura piu tra-sformazioni coniche successive, dalla composizione di queste na-scera una trasformazione che sara ancora di primo ordine, benchein essa alle rette della figura data corrisponderebbero nella tra-sformata, non gia coniche, ma curve d’ordine piu elevato.
In questo breve scritto mi propongo di mostrare direttamentela possibilita di trasformazioni geometriche di figure piane, nellequali le rette abbiano per corrispondenti delle curve di un datoordine qualsivoglia. Stabilisco dapprima due equazioni che devo-no aver luogo fra i numeri de’ punti semplici e multipli comuni atutte le curve che corrispondono a rette.
. . . Domando: quali linee di una figura corrispondono alle rettedell’altra?
Sia n l’ordine della linea che nel piano P’ (o P) corrispondead una qualsivoglia retta del piano P(o P’). Siccome una rettadel piano P e determinata da due punti a,b, cosı i due punticorrispondenti a’,b’ del piano P’ basteranno a individuare la lineache corrisponde a quella retta. Dunque le linee di una figuracorrispondenti alle rette dell’altra formano un tal sistema che perdue punti dati ad arbitrio passa una sola di esse ; cioe quelle lineeformano una rete geometrica dell’ordine n.
Una linea dell’ordine n e determinata da n(n+3)2
condizioni;dunque le linee di una figura corrispondenti alle rette dell’altrasono soggette ad
n(n+ 3)
2− 2 =
(n− 1)(n+ 4)
2
condizioni comuni.Due rette di una figura hanno un solo punto comune a, da
esse determinato. Il punto a’ corrispondente di a, apparterra alledue linee di ordine n che a quelle due rette corrispondono. Esiccome queste due linee devono individuare il punto a’ cosı le
3

loro rimanenti n2− 1 intersezioni dovranno essere comuni a tuttele linee della rete geometrica suaccennata.
Sia xr il numero de’ punti (r)pli (multipli secondo r) comuni aqueste linee; siccome un punto (r)plo comune a due linee equivalead r2 intersezioni delle medesime, cosı avremo evidentemente:
x1 + 4x2 + 9x3 + · · ·+ (n− 1)2xn−1 = n2 − 1 (1)
Gli x1 + x2 + · · · + xn−1 punti comuni alle linee della rete costi-tuiscono le (n−1)(n+4)
2condizioni che la determinano. Se una linea
deve passare r volte per un punto dato, cio equivale ad r(r+1)2
condizioni; dunque;
x1 + 3x2 + 6x3 + · · ·+ n(n− 1)
2xn−1 =
(n− 1)(n+ 4)
2(2)
Le equazioni (1) e (2) sono evidentemente le sole condizioni al-le quali debbano soddisfare i numeri interi e positivi x1, x2, x3, . . . , xn−1.
Esempi. Per n = 2, le equazioni (1) e (2) si riducono all’unica:
x1 = 3,
cioe alle rette di una figura corrisponderanno nell’altra curve disecond’ordine circoscritte ad un triangolo. E questa la cosı dettatrasformatione conica considerata da Steiner, da Magnus e daSchiaparelli.
Per n = 3, si ha dalle (1), (2):
x1 = 4, x2 = 1,
cioe alle rette di una figura corrisponderanno nell’altra curve diterz’ordine aventi tutte un punto doppio e quattro punti semplicicomuni.
Per n = 4, le (1), (2) divengono:
x1 + 4x2 + 9x3 = 15, x1 + 3x2 + 6x3 = 12,
le quali ammettono le due soluzioni:
1.a x1 = 3, x2 = 3, x3 = 02.a x1 = 6, x2 = 0, x3 = 1.
Fra tutte le diverse trasformazioni corrispondenti a un dato valo-re di n ve n’ha una che puo dirsi la piu semplice, perche in essa le
4
curve d’ordine n che corrispondono alle rette della figura propostahanno in comune null’altro che un punto (n-1)plo e 2(n-1) puntisemplici. Di questa speciale trasformazione si e occupato un abi-lissimo geometra francese, il sig. Jonquieres, il quale ne ha messein luce parecchie eleganti proprieta e ne ha fatta applicazione allagenerazione di una certa classe di curve gobbe.
Ora io mi propongo di mostrare che lo stesso metodo e lestesse proprieta si possono estendere anche alle trasformazioniche corrispondono a tutte le altre soluzioni delle due equazioniche ho accennate. E per tal modo si acquistera anche un mezzofacile per la costruzione di altrettante classi di curve gobbe.
2 Geometria e numeri complessi
Le rappresentazioni reali dei punti di una curva algebrica e le su-perficie di Riemann Ad una funzione reale di una variabile reale si puoassociare il grafico che permette di vedere le proprieta principali della curva,almeno quando la curva risulta essere continua. Anche ad una funzione realedi due variabili reali F (x, y) possiamo associare il luogo dei punti le cui coor-dinate verificano l’equazione. Anche nel campo complesso si puo associaread una funzione F (z) e a un’equazione G(z, w) = 0 un sottoinsieme di C2,ma a differenza del caso reale, tale oggetto non puo essere immediatamentevisualizzato nello spazio tridimensionale. In questo paragrafo vedremo comeRiemann concepisce il grafico di una funzione analitica o il luogo dei punti diuna curva algebrica come una superficie reale, la superficie di Riemann dellafunzione o della curva. La superficie di Riemann e un oggetto intrinseco,munito di una struttura analitiche che permette di definire la nozione di fun-zione mesomorfa, di forma differenziale ecc. in maniera da estendere l’analisicomplessa a questi oggetti, in maniera analoga a come Riemann aveva estesole costruzioni della geometria elementare alle varieta differenziali munite diun tensore metrico.
In questa sezione ci limiteremo a considerare esclusivamente la topologiadi una superficie si Riemann.
Enriques, La costruzione della superficie di Rieman di un’equazionealgebrica, tratto da [?]
Una curva algebrica f(xy) = 0, concepita come luogo di puntireali e immaginari, costituisce una serie doppiamente infinita dielementi, che si puo rappresentare come una superficie. Questarappresentazione reale puo essere ottenuta in vari modi.
5

Anzitutto ponendo
x = x1 + ix2
y = y1 + iy2
e separando in f le parti reale e immaginaria:
f(x1 + ix2, y1 + iy2) = f1(x1x2y1y2) + if2(x1x2y1y2),
si ottiene nello spazio a quattro dimensioni (x1x2y1y2) una super-ficie rappresentata dalle equazioni
f1 = 0, f2 = 0,
della quale si hanno a considerare soltanto i punti reali; questasuperficie, i cui punti reali corrispondono ai punti reali e imma-ginari della curva f(xy) = 0, puo anche venire proiettata (da unpunto esterno) nello spazio ordinario a tre dimensioni, ed ognunadelle proiezioni cosı ottenute porge ancora una rappresentazionereale della curva f(xy) = 0.
Anche senza ricorrere a considerazioni iperspaziali, si riescea costruire direttamente una superficie cui punti corrispondonoin modo biunivoco e continuo alle coppie di valori x e y definitedall’equazione f(xy) = 0. Infatti Riemann1, a cui e dovuta larappresentazione delle soluzioni reali e complesse della f(xy) = 0sopra un continuo a due dimensioni, e giunto allo scopo collacostruzione di superficie composte di piu fogli sovrapposti, nelmodo che qui vogliamo brevemente illustrare.
Si consideri dapprima l’equazione algebrica
y2 = f(x) = (x− a1)(x− a2) . . . (x− am);
essa vale a definire una funzione a due rami
y(x) = ±√f(x).
I detti rami vengono scambiati fra loro per un giro chiuso della xche comprenda uno o un numero dispari di punti di diramazioneai; per conseguenza un giro esterno un cerchio sufficientementegrande che comprenda tutti i punti a1 . . . am vale a dire un gi-ro intorno al punto all’infinito, produce o no lo scambio dei due
1Theorie der Abel’schen Functionen, (1857). (Cfr. Werke, p. 84).
6

rami di y(x) secondoche m e dispari o pari: quindi se m e di-sparisi aggiunge ai punti di diramazione a1 . . . am anche il puntoall’infinito; questo caso si riduce al caso in cui m e pari con unatrasformazione lineare sulla x.
Ponzassi per semplicita che m sia pari e cosı la y(x) posseggasoltanto i punti di diramazione al finitoa1, . . . , am. Per quanto ab-biamo detto, il piano della variabile complessa x non porge unarappresentazione delle soluzioni (xy) dell’equazione y2 = f(x),perche in ogni punto x sono, per cosı dire, deposti due valori del-le y(x); per ovviare all’inconveniente viene l’idea di consideraredue piani fogli sovrapposti, sopra ciascuno dei quali si depongonoi valori di uno dei due rami; ma non e possibile ottenere in talguisa una rappresentazione adeguata allo scopo, imperocche lecoppie(xy) formano un continuo inseparabile, permutandosi, co-me si e detto, i due rami di y(x) per giri chiusi delle x; cosı apparela necessita di collegare fra loro due fogli, stabilendo opportuneconvenzioni circa il passaggio dall’uno all’altro, in corrispondenzaai movimenti di x nel proprio piano. Un sistema di convenzionirispondenti allo scopo puo essere stabilito come segue.
A partire da un punto generico, o, del piano delle x, si esegui-scano dei tagli, per esempio rettilinei, lungo linee congiungentio coi punti di diramazione ai, le quali non si traversino tra lo-ro. Questo sistema di tagli supponendosi eseguito, accade cheun qualunque giro chiuso della x (non potendo attraversare untaglio, ne quindi involgere alcun punto di diramazione) non pro-duce alcuno scambio fra i due rami della y(x). Ora immaginiamodi deporre i due valori della y(x) sopra due piani sovrapposti alpiano delle x su cui vengano eseguiti i medesimi tagli; finche la xsi muove senza attraversare uno dei tagli, i due rami y si muovo-no nei rispettivi fogli senza passaggio dall’uno all’altro; sugli orliopposti di un medesimo taglio si trovano deposti valori della yuguali e di segno contrario, giacche il passaggio dall’uno all’altrocasi effettua per mezzo di un giro chiuso della x attorno ad unpunto di diramazione, aumentando (o diminuendo) l’argomentodi f di 2π. Cio posto i due fogli, su cui vengono rappresentatii due rami della y(x), debbono naturalmente collegarsi lungo itagli, saldando ciascun orlo del primo foglio all’orlo dell’altro sucui vengono deposti i medesimi valori della x; cosı quando la xattraversa un taglio si passa con la y da un foglio all’altro. Ilmodo del passaggio puo essere reso evidente con un modello: siha una superficie a due fogli orizzontali che si traversano lungo
7
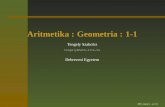
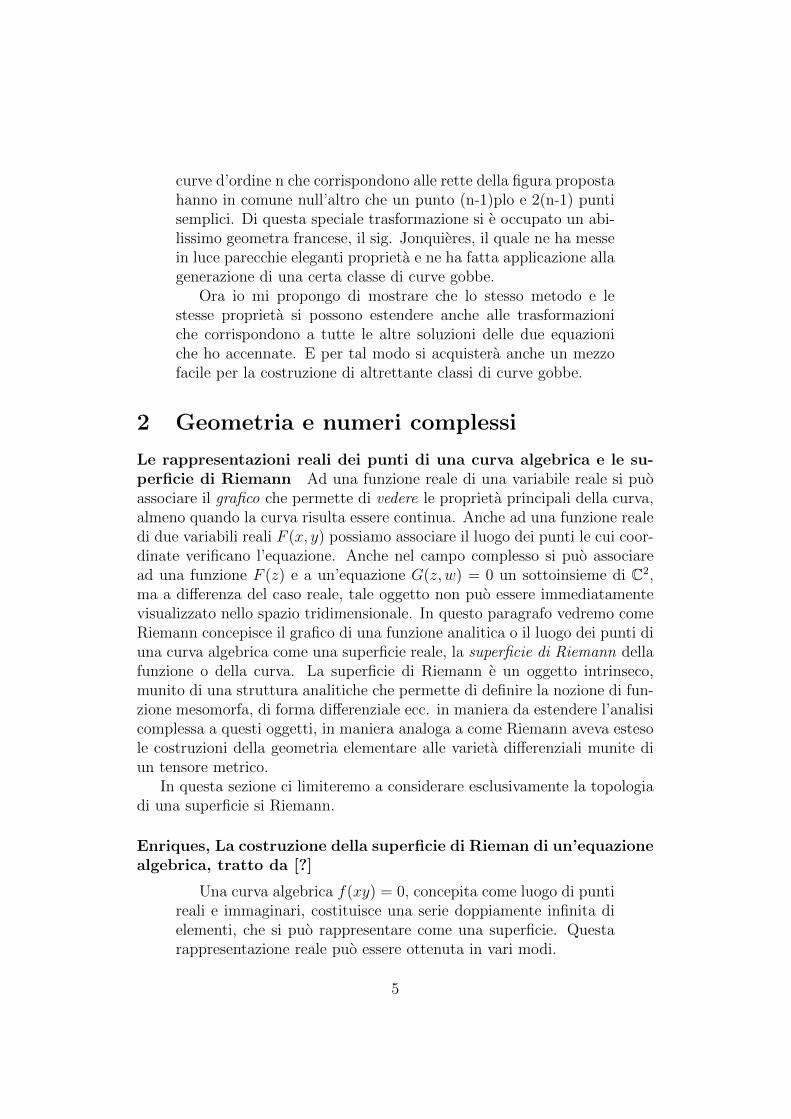
una linea doppia, e l’annessa figura ne porge la sezione verticale,perpendicolare ad un taglio.
Sezione normale della superficie di Riemann della radice quadrata.
Proiezione tridimensionale della superficie di Riemann della radice
quadrata vicino al punto (0, 0).
La superficie a due fogli cosı costruita rappresenta senza ec-cezione il continuo (xy) definito dalla equazione y2 = f(x) , edicesi superficie di Riemann relativa alla funzione algebrica y(x),od anche alla curva y2 = f(x).
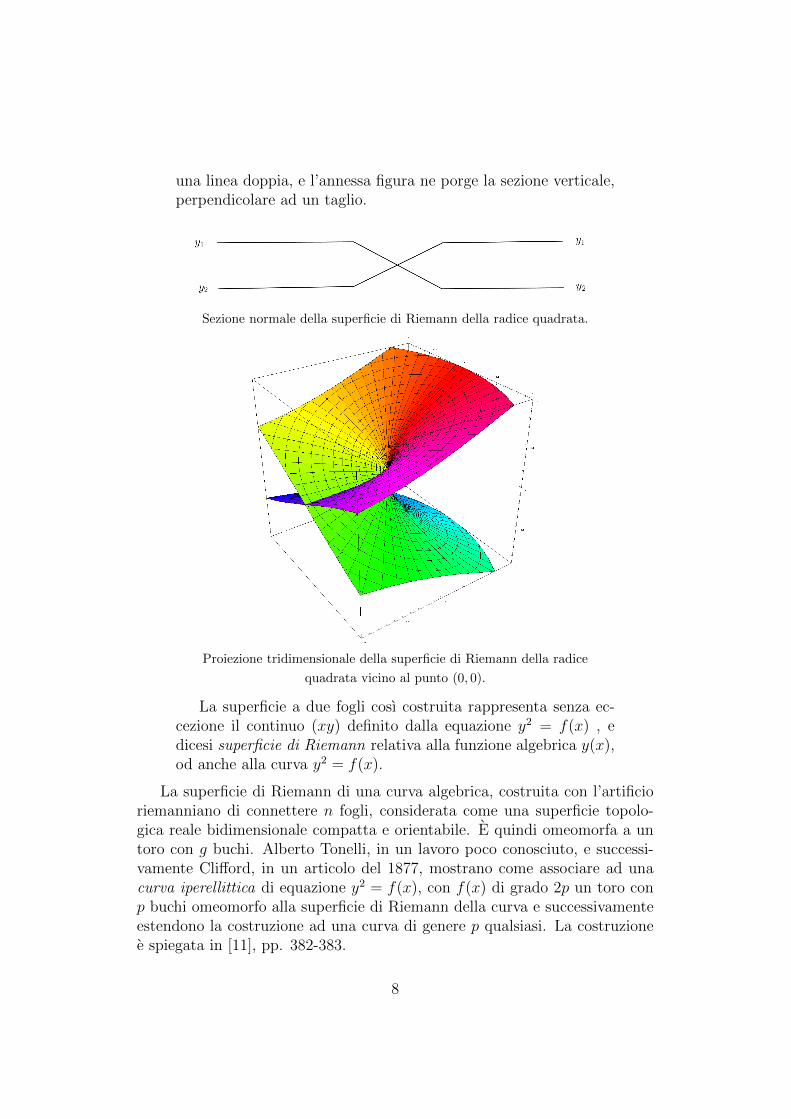
La superficie di Riemann di una curva algebrica, costruita con l’artificioriemanniano di connettere n fogli, considerata come una superficie topolo-gica reale bidimensionale compatta e orientabile. E quindi omeomorfa a untoro con g buchi. Alberto Tonelli, in un lavoro poco conosciuto, e successi-vamente Clifford, in un articolo del 1877, mostrano come associare ad unacurva iperellittica di equazione y2 = f(x), con f(x) di grado 2p un toro conp buchi omeomorfo alla superficie di Riemann della curva e successivamenteestendono la costruzione ad una curva di genere p qualsiasi. La costruzionee spiegata in [11], pp. 382-383.
8
I punti reali della curva y2 = x(x−1)(x−2)(x−3), in nero nella figura, si possono ottenere
deformando con continuita la sezione reale di un toro, superficie topologica di genere uno,
in nero e rosso nella figura.
3 Funzioni ellittiche
Calcolo della lunghezza d’arco di una curva Il problema del calcolodella lunghezza d’arco di una curva e alla base della teoria delle funzioniellittiche.
Se una curva e il grafico di una funzione derivabile y = f(x), sopra a undato intervallo [a, b], la sua lunghezza e∫ b
a
√1 + (f ′(x))2dx
Nel caso della circonferenza di equazione x2 +y2 = 1 si tratta di calcolare∫ t
0
1√1− x2
dx,
che si puo integrare facilmente con la funzione arcoseno, mentre nel casodell’ellisse di equazione x2
a2+ y2
b2= 1 (con a ≥ b) si tratta di calcolare∫ t
0
a2 − e2x2√(a2 − x2)(a2 − e2x2)
dx
dove e2 = a2−b2a2
definisce l’eccentricita e dell’ellisse. In questo caso pero nonesistono funzioni elementari (composizioni di funzioni razionali, esponenziali,trigonometriche e loro inverse) per esprimere l’integrale.
Mentre il primo integrale si puo esprimere
9
Integrali ellittici A cominciare dal termine del secolo dicassettesimo, di-versi matematici, tra cui specialmente Giacomo e Giovanni Bernoulli2, af-frontarono il problema piu generale di risolvere integrali del tipo∫
p(x)√q(x)
dx
dove p(x) e q(x) sono polinomi con grado di q(x) maggiore o uguale a tre.Viste le difficolta di effettuare l’integrazione, comincio a formarsi l’idea chetali integrali non fossero, in generale, calcolabili utilizzando combinazionialgebriche finite di sole funzioni elementari cioe funzioni razionali, trigono-metriche, esponenziali e loro inverse. Cio fu dimostrato definitivamente daLiouville nel 1833.
Lagrange, sugli integrali ellittici Nel 1784 G. Lagrange definisce unintegrale ellittico come un integrale della forma∫
R(x, y)dx,
ove R(x, y) e una funzione razionale e
y2 = a0x4 + 4a1x3 + 6a2x
2 + 4a3x+ a4
e un polinomio a radici distinte (senza escludere la possibilita che sia a0 = 0,nel qual caso a1 6= 0). Lagrange mostra come essi si possano sempre ridurread una somma di espressioni elementari e di un integrale del tipo:∫
N(x)dx√(1± p2x2)(1± q2x2)
dove N(x) e una funzione razionale di x2 e p eq sono numeri reali con p > q.
Legendre e la riduzione alle forme canoniche I primi risultati di Le-gendre sugli integrali ellittici risalgono al 1786, anno in cui egli presentoall’Accademia delle Scienze di Parigi la Memoire sur l’integration par arcsd’ellipse et sur la comparation de ces arcs. La memoria piu importante sul-l’argomento delle funzioni trascendenti e pero la Memoire sur les trascendan-tes elliptiques che presento all’Accademia delle Scienze di Parigi nel 1793. In
2Giacomo Bernoulli si pose il problema dell’integrazione dell’arco di ellisse e dell’arco dilemniscata, la curva di equazione cartesiana (x2 + y2)2 +x2− y2, che conduce all’integrale∫
dt√1−t4 , e che divenne particolarmente importante a seguito delle ricerche di Fagnano.
10

questa memoria, Legendre, si propone di confrontare tra loro tutte le tra-scendenti ellittiche, di classificarle in differenti specie, riducendole alla formapiu semplice possibile e di determinare il metodo piu facile e rapido per illoro calcolo approssimato. Il risultato principale di questa memoria e cheogni integrale ellittico e sempre riconducibile all’integrale di una funzionerazionale, piu la somma di integrali dei seguenti tre tipi:
F =
∫dx√
(1− x2)(1− k2x2)E =
∫1− k2x2√
(1− x2)(1− k2x2)dx
Π =
∫dx
(1 + nx2)√
(1− x2)(1− k2x2)(3)
equivalentemente, e possibile trasformare queste tre forme nelle tre corri-spondenti forme trigonometriche con la sostituzione x = sin Φ, ottenendo
F =
∫dΦ
∆, E :=
∫∆dΦ, Π =
∫dΦ
(1 + n sin2 Φ)∆)
con ∆ =√
1− k2 sin2 Φ e 0 ≤ k ≤ 1.
Tra il 1825 e il 1828, Lagrange pubblico il Traite des fonction elliptiques.L’espressione fonctions elliptiques nel titolo puo dar luogo a qualche confu-sione. Legendre chiamo questi integrali, come funzioni del secondo estremodi integrazione, funzioni ellittiche; dopo i lavori di Abel e Jacobi si riservaquesto nome alle funzioni meromorfe doppiamente periodiche, tra le quali visono le funzioni che si ottengono invertendo gli integrali ellittici di primaspecie.
Nell’ “avertissement” del Traite [vol. I], si legge:
La parte piu estesa e allo stesso tempo piu importante dell’o-pera che l’autore ha pubblicato sotto il nome di Esercizi di calcolointegrale, e, come si sa, quella che tratta delle funzioni ellittiche, eloro applicazioni a differenti problemi di geometria e meccanica, edella costruzione di tavole necessarie per l’uso di queste funzioni.Questa parte, cosı come quella che concerne gli integrali definiti,ai quali l’autore ha dato il nome di integrali Euleriani, sono ri-prodotte in questo trattato con un gran numero di aggiunzioni, ilcui scopo e quello di perfezionare la teoria di queste trascedenti
(. . . )
11
Non sara difficile per la storia della Scienza, fare osservare qui chequesta nuova branca dell’analisi alla quale l’Autore ha dato il no-me di Teoria delle funzioni ellittiche, e fondata in gran parte sullebasi stabilite nel capitolo V, concernente la forma piu semplice diqueste funzioni e loro divisione in tre specie...
Legendre introdusse anche la nomenclatura che diverra poi d’uso comune.Egli chiama: Φ amplitudine, k modulo,
√1− k2 modulo complementare e
n = c−2 parametro della funzione ellittica.
Nuovi impulsi da Abel e Jacobi Nel terzo volume del Traite, Legendrescrive
Prima di essermi occupato, per un gran numero di anni, dellateoria delle funzioni ellittiche di cui l’immortale Euler aveva po-sto le fondamenta, ho pensato di dover riunire i risultati di questolungo lavoro in un trattato che e stato reso pubblico nel Gennaio1827. Fino a quel momento i geometri non avevano preso parte aquesto genere di ricerche; ma non appena la mia opera ha vistola luce, non appena il suo titolo fu conosciuto dai dotti stranieri,ho appreso con tanto stupore, quanta soddisfazione, che due gio-vani geometri, i signori Jacobi di Konisberg e Abel di Christiana,erano riusciti, attraverso i loro particolari lavori, a perfezionareconsiderevolmente la teoria delle funzioni ellittiche nei suoi piualti gradi.
Funzioni ellittiche Furono considerate inizialmente da Abel le funzioniche invertono un integrale ellittico. Infatti Abel si rese conto che, come lafunzione arcsin(x) =
∫ x0
1√1−t2dt e piu complicata della sua inversa, sinx, cosı
anche per gli integrali ellittici generali conviene partire dallo studio delle lorofunzioni inverse. Come la funzione seno, anche quelle studiate da Abel sonoperiodiche, ma rispetto a due periodi. La definizione generale e quindi cheuna funzione ellittica e una funzione meromorfa periodica in due direzioni,ovvero periodica rispetto a un reticolo.
Un reticolo e un insieme Λ di numeri complessi del tipo Λ = {mω1 +nω2|m,n ∈ Z} ⊆ C, con ω1/ω2 6∈ R. Una funzione f : C → C si diceperiodica di periodo Λ se f(z + ω) = f(z) per ogni ω ∈ Λ.
Jacobi e Weistress costruirono, per ogni curva ellittica, un numero finitodi funzioni ellittiche con le quali esprimere le altre. Quelle di Jacobi sonoforse piu importanti per le applicazioni, ma quelle di Weiestrass sono piusemplici per la teoria.
12

La funzione ellittica di Weierstrass associata a un reticolo Λ e la funzione
P(z) =1
z2+
∑ω∈Λ\{0}
(1
(z − ω)2− 1
ω2
).
Teorema Il campo delle funzioni ellittiche rispetto a un reticolo Λ egenerato dalla funzione P e dalla sua derivata P ′ che sono legate dallarelazione
(P ′(z))2
= 4 (P(z))3 − g2P(z)− g3
dove
g2 = 60∑
ω∈Λ\{0}
1
ω4
e
g3 = 140∑
ω∈Λ\{0}
1
ω6.
4 Integrali abeliani
Abel riuscı a trovare la chiave per generalizzare lo studio dell’integrale diuna funzione razionale su una curva ellittica al caso di una curva algebricaqualsiasi.
SiaF (z, w) = a0(z)wn + a1(z)wn−1 + · · ·+ an(z) = 0
una equazione algebrica e sia F la corrispondente superficie di Riemann.Sia R(z, w) una funzione razionale, che pensiamo ristretta F . Possiamoconsiderare ∫ z1
z0
R(z, w)dz,
Il differenziale R(z, w)dz si chiama differenziale abeliano e il corrispondenteintegrale, integrale abeliano. La sua integrazione va considerata sull’interasuperficie di Riemann. La forma differenziale R(z, w)dz e solo l’espressionelocale della forma da integrare su una carta della superficie di Riemann3.
3Una superficie di Riemann F e definita intrinsecamente da un ricoprimento aperto{Uα}, ad ognuno dei quali e associata una carta locale φα : Uα → C tale che per tutti ipunti P ∈ Uα ∩ Uβ la funzione cambiamento di carta φβ ◦ φ−1α : C → C sia analitica inφα(P ).
13

Cambiando carta, cambia anche l’espressione del differenziale. 4 Sulla super-ficie di Riemann, l’integrale abeliano dipende piu precisamente dal camminoγ di integrazione che congiunge gli estremi di integrazione, e lo indichiamo∫
γ
R(z, w)dz,
I differenziali abeliani si distinguono in tre tipi: quelli del primo tipo sonoquelli ovunque olomorfi, per cui
∫γω(z)dz e funzione (polidroma) ovunque
finita; quelli del secondo tipo sono quelli meromorfi con residuo zero attornoad ogni poli, per cui
∫γω(z)dz e funzione (polidroma) che ha solo poli co-
me singolarita; quelli del terzo tipo sono quelli meromorfi generali, per cui∫γω(z)dz e funzione (polidroma) che ha singolarita polari o logaritmiche.
I differenziali olomorfi su una curva I differenziali olomorfi su unacurva di genere p costituiscono uno spazio vettoriale di dimensione p. Sceltauna base ωi dello spazio dei differenziali olomorfi e una basaj e del primogruppo di omologia della superficie di Riemann, la matrice M = mij =
∫ajωi
4Per chiarire questo punto, partiamo dall’espressione di una funzione razionale sullapiu semplice superficie di Riemann, la retta proiettiva. P1, con coordinate omogenee x0 ex1 si puo ricoprire con due aperti affini: U0, dove x0 6= 0, con coordinata affine x = x1/x0e U1, dove x1 6= 0, con coordinata affine y = x0/x1. Nell’ intersezione
y = 1/x.
Un oggetto come una funzione o un differenziale puo essere definito separatamente in U0 eU1 pur di incollarsi in U0 ∩U1. Per esempio, quali funzioni olomorfe esistono su P1? Unafunzione olomorfa in U0 e un polinomio in x, quindi della forma a0 + a1x + · · · + anx
n.Una funzione olomorfa in U1 e un polinomio in y, quindi della forma b0 +b1y+ · · ·+bmy
m.Le condizioni di incollamento sono
a0 + a1x+ · · ·+ anxn = b0 + b11/x+ · · ·+ bm(1/x)m
Questo e possibile se e solo se a0 = b0 e tutti gli altri coefficienti ai e bj sono nulli. Quindile uniche funzioni olomorfe su P1 sono le costanti.
Analogamente possiamo cercare di determinare differenziali olomorfi su P1. Per espri-mere le condizioni di incollamento dobbiamo premettere che da y = 1/x segue che inU0 ∩ U1
dy = −1/y2dy
La condizione perche due differenziali olomorfi (a0 + a1x + · · · + anxn)dx e (b0 + b1y +
· · ·+ bmym)dy si incollino e quindi che
a0 + a1x+ · · ·+ anxn = −(b0 + b11/x+ · · ·+ bm(1/x)m)1/x2
che non puo mai essere soddisfatta. Quindi non esistono differenziali olomorfi sulla rettaproiettiva.
14

si dice matrice di Riemann e verifica un insieme di relazioni importanti detterelazioni di Riemann, dalle quali si possono leggere le principali proprietadella superficie di Riemann.
5 Funzioni abeliane
Le funzioni abeliane nascono dal problema di invertire gli integrali abeliani.Non e piu possibile, in generale, invertire il singolo integrale abeliano ma,seguendo Abel, bisogna invertire la somma di p integrali abeliani di primaspecie, ottenendo in questo modo una funzione di piu variabili, le funzioniabeliane speciali.
Una funzione abeliana generale sara allora, in analogia con il caso ellittico,una funzione di p variabili, periodica rispetto a 2p periodi wν indipendentisu R, cioe una funzione che verifica f(z + wν) = f(z) per ogni z ∈ Cp e perogni wν .
Le funzioni razionali su una superficie di Riemann Riemann ha mo-strato come associare ad una curva algebrica, ovvero ad un polinomio indue variabili una superficie reale bidimensionale compatta, con una strutturaanalitica. Le funzioni razionali su questo oggetto corrispondono alle restri-zioni alla curva delle funzioni razionali del piano proiettivo. Riemann mostracome sia conveniente studiare tali funzioni in maniera intrinseca, con riferi-mento ad una superficie topologica dotata di una struttura analitica. Unafunzione meromorfa e allora semplicemente una collezione di funzioni mero-morfe su ogni carta che si incollano opportunamente nelle intersezioni dellecarte. Prima di enunciare il principale risultato sulle funzioni meromorfe suuna superficie di Riemann introduciamo il concetto di divisore, che sara utilea caratterizzare i poli e gli zeri di una funzione.
Un divisore su una curva e una combinazione lineare finita di punti acoefficienti interi. Un divisore si dice effettivo se i coefficienti sono tuttipositivi. Ad ogni funzione meromorfa f su una superficie di Riemann S eassociato il divisore (f) =
∑p∈X ordp(f), dove ordp(f) indica l’ordine di zero
o di polo di f in p.Due divisori effettiviD eD′ di dicono linearmente equivalenti se esiste una
funzione meromorfa f tale che f = D −D′. D si dira allora il divisore deglizeri e D′ il divisore dei poli di f . L’insieme di tutti i divisori linearmenteequivalenti ad un divisore dato di dice serie lineare completa. Una serielineare completa e determinata da uno spazio vettoriale di dimensione finitadi funzioni razionali. Ogni sottospazio vettoriale di tale spazio si dice serielineare.
15

Una 1-forma meromorfa e una 1-forma su S, che localmente ha formaω(z) = f(z)dz, con f(z) funzione meromorfa.
Teorema Il grado di una 1 forma meromorfa vale 2g − 2Come esempio, si consideri la forma meromorfa dz su P1 che, come ab-
biamo visto in una nota precedente e privo di zeri e di poli sulla cartidi coordinata zero ma ha un polo di ordine due sulla carta di coordinataw = 1/z.
Dato un divisore D, definiamo H0(OC(D)) come lo spazio vettoriale ditutte le funzioni meromorfe f sulla superficie di Riemann tali che (f) +D ≥05. Definiamo l(D) = dim(H0(OC(D)).
Teorema di Riemann Per ogni divisore D su una superficie di RiemannS l(D) ≥ deg(D)− g + 1
Teorema di Roch Per ogni divisore D su una superficie di Riemann S
l(D)− deg(D) + g − 1 = l(K −D).
l(K −D) si dice indice di specialita di D.Conseguenze del teorema di Riemann Roch Consideriamo il caso
S = P1. In questo caso l’indice di specialita di ogni divisore e nullo, essendovuota la serie canonica. Sia P il divisore costituito da un solo punto. Allora,l(P ) = 2. Infatti, una base per H0(OP1(P )) e c0 + c1
1z.
Analogamente, l(kP ) = k + 1. Infatti, una base per H0(OP1(kP )) ec0 + c1
1z
+ · · ·+ ck1zk
.Nel caso delle curve ellittiche (g = 1), la sequenza l(kP ) e
1, 1, 2, 3, 4, 5, ...
Quindi l’unico divisore con indice di specialita non nullo e P .Nel caso g = 2, esistono esattamente 6 punti per cui la sequenza l(P ) e
1, 1, 2, 2, 3, 4, 5, . . .
Nel resto dei punti, la sequenza e
1, 1, 1, 2, 3, 4, 5, . . . .
I punti del primo tipo si dicono punti di Weierstrass della curva.
Considerazioni sul lavoro di Riemann Riemann fu il primo ad adottareil punto di vista della geometria birazionale (o bianalitica) dimostrando cheil genere e un invariate birazionale.
5Vedi oltre per un esempio.
16
L’interpretazione geometrica di Clebsch e di Brill e Noether del la-voro di Riemann Le idee di Riemann vennero riprese da Clebsch il qualesi ripropose di ritrovarne i risultati e di svilupparli con metodi puramentealgebrici. Egli scoprı tra l’altro che il genere p di una curva piana irriducibiledotata di soli nodi e uguale a (n−1)(n−2)
2− δ, dove, δ e il numero dei nodi.
La morte prematura di Clebsch non interruppe questo programma, che fu ri-preso dai suoi allievi Brill e Noether, che svilupparono una teoria puramentealgebrica delle curve piane. La memoria principale in cui viene sviluppatoquesto approccio e quella di Brill e Noether del 1873. In essa si introdu-ce il concetto fondamentale di serie lineare, cui abbiamo gia accennato inprecedenza.
Una serie lineare grn, di grado n e dimensione r su una curva piana irri-ducibile C e la famiglia dei divisori effettivi che vengono segati da un sistemalineare r dimensionale di di curve (di grado fissato), cioe da tutte le curve diequazione λ0F0 + · · · + λnFn = 0 con Fi polinomi omogenei di uguale gradoe fissati. A tali intersezioni si possono aggiungere o togliere punti fissi adarbitrio (modificandone il grado ma non la dimensione).
Ad esempio, la serie segata su una curva di grado n dalle rette di unafascio per un punto P e una g1
n per il teorema fi Bezout. Questa serie hauna punto fisso se P appartiene alla curva, eventualmente di molteplicitamaggiore di 1 se il punto e singolare per la curva C. Togliendo questo puntofisso otteniamo dalla g1
n una g1n−1.
Due divisori di una serie lineare sono sempre linearmente equivalenti.L’insieme di tutti i divisori linearmente equivalenti a quelli di una serie datae una serie lineare che si dice completa e che contiene quella di partenza.
Ad esempio, la g23 tagliata dalle rette sulla cubica con un nodo e contenuta
nella g33 segata dalle coniche che passano per il nodo e per un altro punto
qualsiasi della cubica. Per ogni grn deve essere r ≤ n e se r = n allora lacurva e razionale.
Le serie lineari vengono trasformate in serie lineari da una qualsiasi tra-sformazione birazionale. Conviene studiare le serie su curve piane dota-te di soli punti multipli ordinari, cui possiamo ridurre ogni curva con unasuccessione di trasformazioni quadratiche6.
Le considerazioni topologiche e analitiche di Riemann furono sostituite daBrill e Noether dallo studio delle serie lineari e dalle loro proprieta. La seriecanonica su una curva C di grado n dotata di soli punti multipli ordinari e laserie completa segata su C fuori dai punti singolari dal sistema lineare dellecurve piane di ordine n− 3 passanti con molteplicita ≥ s− 1 per ogni puntos-plo di C. Le curve di questo sistema lineare si chiamano curve aggiunte
6L’altro fondamentale teorema per la teoria di Brill Noether e il teorema dell’AF +BΦ
17

e il sistema si dice canonico. La serie canonica, in funzione del genere gdella curva, e una gg−1
2g−2 su C. Il legame tra la serie canonica e lo spazio deidifferenziali olomorfi su C e dato dal fatto che ogni differenziale olomorfo sipuo scrivere come
ω = G(x, y)dx
∂F/∂y
dove F = 0 e l’equazione della curva C e G l’equazione di una curva aggiunta.Se |D| e una grn completa e se K e un divisore canonico, la serie |K −D|
si chiama la residua di D; e una gi−12g−2−n, dove i ≥ 0 si chiama l’indice di
specialita di D e D si dice speciale se i > 0.Nel linguaggio di Brill e Noether il teorema di Riemann-Roch che permet-
te di calcolare la dimensione di spazi di funzioni mesomorfe con singolaritaassegnate su una data superficie di Riemann, divenne il legame
r − i = n− g
tra il genere g ed i caratteri di una grn completa.
l’Interpretazione iperspaziale Una grn su una curva liscia C determinaun morfismo φ : C → Pr. Il grado d dell’immagine e il numero h dellecontroimmagini di un punto generico di φ(C) sono legati da n = h · d.
La mappa φ : C → |D|∗ e determinata nel modo seguente:
φ(P ) = {D ∈ |D| t.c. P ∈ D.
Quando h = 1, ogni divisore D si puo quindi identificare una una sezioneiperpiana di φ(C).
Il metodo che Segre e Castelnuovo introdussero per studiare le serie linearisulle curve consiste nello studiare le serie lineari sulla curva canonica cioel’immagine di C con il morfismo associato a K. Salvo che per le curveiperellittiche il morfismo canonico e bijettivo sull’immagine e quindi la curvacanonica e una curva di grado 2g − 2 in Pg−1. Ogni proprieta delle serielineari si puo leggere come una proiettiva della curva canonica.
L’indice di specialita di un divisore D e il numero di iperpiani linearmenteindipendenti che contengono D. La serie |D| e segata dagli iperpiani chepassano per il residuo un qualunque divisore D ∈ |D|.
Riferimenti bibliografici
[1] Bertini E., 1917 Della vita e delle opere di Luigi Cremona, in Operematematiche di Luigi Cremona, Milano, t. III pp.V-XXII. Disponibileonline su www.luigi-cremona.it.
18
[2] Bottazzini U., Luigi Cremona in Dizionario biografico degli italiani, advocem.
[3] Bottazzini U., 1994 Va’ pensiero: Immagini della matematica nell’Italiadell’ottocento, Il mulino.
[4] Boyer C.B., 1990 Storia della matematica, Mondadori, Milano.
[5] Carnot L.N.M., 1803 Geometrie de position, J.B.M.Duprat, Paris.
[6] Castelnuovo G., 1930 Luigi Cremona nel centenario della nascita, Com-memorazione, in Rendiconti della Reale Accademia dei Lincei, serie VI,vol. XII, pp. 613-618. Disponibile online su www.luigi-cremona.it.
[7] Chasles M., 1875 Apercu historique sur l’origine et le developpement desmethodes en geometrie, Gauthier-Villars,Imprimeur-Libraire, Paris.
[8] Cremona L., 1862 Introduzione ad una teoria geometrica delle curvepiane, Tipi Gamberini e Parmeggiani, Bologna.
[9] Cremona L., 1864 Sulle trasformazioni geometriche delle curve pianeNota I,Annali di Matematica pura ed applicata, serie I, tomo VI, pp.153-168.
[10] Dolgachev I.V., 2005 Luigi Cremona and cubic surfaces, Incontro diStudio, 36, Istituto Lombardo di Scienze e Lettere, Milan, pp.55-70.
[11] Enriques F., Chisini, O., 1912-23 Teoria delle funzioni algebriche di unavariabile, vol.3, Zanichelli.
[12] Cooke R., Abel’s Theorem, in Rowe D. E. - Mc Cleary J., The historyof modern mathematics, vol I, Academic Press, 1989.
[13] Del Centina A (a cura di). Storia delle Funzioni ellittiche e abelia-ne, http://web.unife.it//progetti//geometria//divulg// Funzioniellitti-che//index.htm
[14] Del Centina La memoria parigina di Abel
[15] Gray J., 2010 Worlds Out of Nothing: A Course in the History of Geo-metry in the 19th Century Springer Undergraduate Mathematics Series,Springer.
[16] Gueraggio A., Nastasi, P., 2010 L’Italia degli scienziati, Mondadori.
19
[17] Kleiman S., What is Abel’s theorem anyway, in The legacy of NielsHenrik Abel, New York, Springer, (2002).
[18] Klein F., 1979 Developement of mathematics in the 19th century in LieGroups Series, vol.9, Math Ci Press, Brookline, Massachussetts.
[19] Kolmogorov A.N., Yushkevich,A.P., 1996 Mathematics of the 19thCentury, Birkhauser, Boston.
[20] Loria G., 1904 Luigi Cremona et son oeuvre mathematique, Bi-blioteca Matematica, (3), 5, pp.125-195. Disponibile online suwww.luigi-cremona.it.
[21] Mobius A.F., 1827 Der barycentrische Calcul, Verlag von JohannAmbrosius Barth, Leipzig.
[22] Nastasi P.,(2011) “I congressi degli scienziati (1839-1847)”, Letteramatematica pristem ,Milano, Springer, n.78, (Giugno).
[23] Plucker J., 1828 Analytisch-geometrische entwicklungen, G.D. Baedeker,Essen.
[24] Plucker J., 1835 System der analytischen Geometrie, Verlag von Dunckerund Humblot, Berlin.
[25] Poncelet J.-V., 1865 Traite des proprietes projectives des figures,Gauthier-Villars,Imprimeur-Libraire, Paris.
[26] Russo L., Santoni, E., 2010 Ingegni minuti, Feltrinelli.
[27] Semple J.G., Roth, L., 1949 Introduction to Algebric Geometry, At theClarendon Press, Oxford.
[28] Sernesi E., 2000 Geometria I, Seconda edizione, Bollati Boringhieri,Torino.
[29] Sernesi E., 1984 Una breve introduzione alle curve algebriche, in Atti delConvegno di Geometria algebrica, Tecnoprint, Bologna.
[30] Veronese G., 1903 Commemorazione del Socio Luigi Cremona, Rendi-conti della Reale Accademia dei Lincei, (5), 12, pp.664-678. Disponibileonline su www.luigi-cremona.it.
[31] http://85.18.35.194/Siam/index.php.
20

[32] Siegel C. L., Topics in Complex Function Theory, Voll. 1 - 2: EllipticFunctions and Uniformization Theory, Pure and Applied Mathematics:A Wiley-Interscience Series of Texts, Monographs and Tracts, 25.
21