Geração de Energia Elétrica Laboratório³pria do Sistema”, expressa por um coeficiente de...
23
Geração de Energia Elétrica Laboratório Joinville, 26 de Março de 2012 Aspectos Dinâmicos da Geração Hidroelétrica Laboratório Fernando B. Prioste
Transcript of Geração de Energia Elétrica Laboratório³pria do Sistema”, expressa por um coeficiente de...
Geração de EnergiaElétrica
Laboratório
Joinville, 26 de Março de 2012
Aspectos Dinâmicos da Geração Hidroelétrica
Laboratório
Fernando B. Prioste
Escopo dos Tópicos AbordadosControle de Carga-FrequênciaRegulação Primária– Modelo do Sistema de Potência;– Reguladores de Velocidade;– Modelos de Turbinas Hidráulicas.
Modelos “Completos” – Sistema de Potência + Reguladores de Velocidade+
Turbinas Hidráulicas
2
Fernando B. Prioste
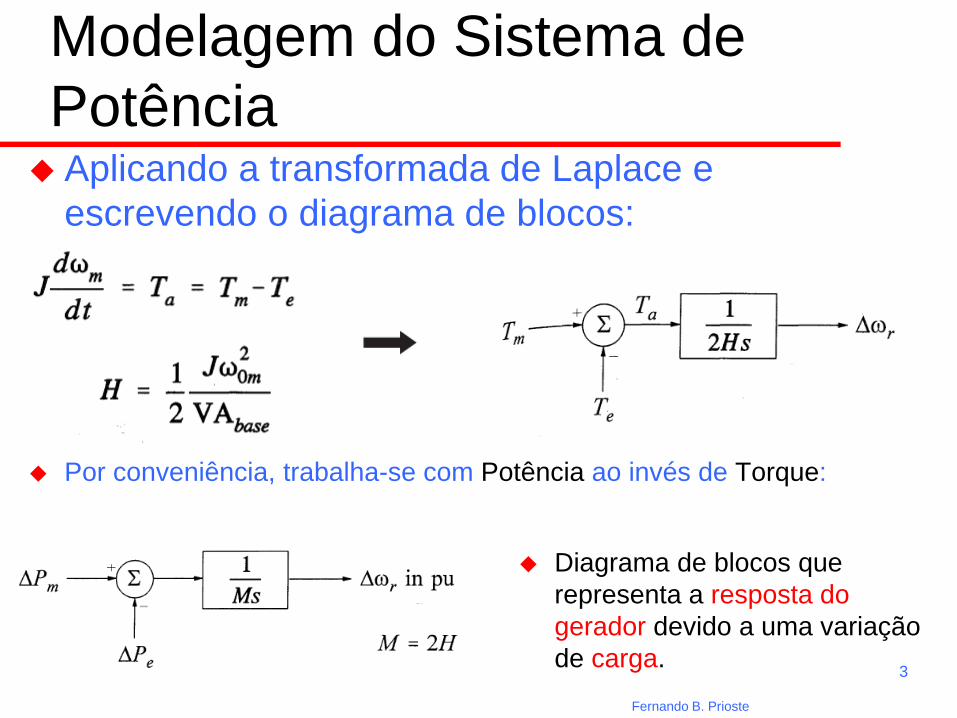
Modelagem do Sistema de PotênciaAplicando a transformada de Laplace e escrevendo o diagrama de blocos:
Por conveniência, trabalha-se com Potência ao invés de Torque:
3
Diagrama de blocos querepresenta a resposta do gerador devido a uma variaçãode carga.
Fernando B. Prioste
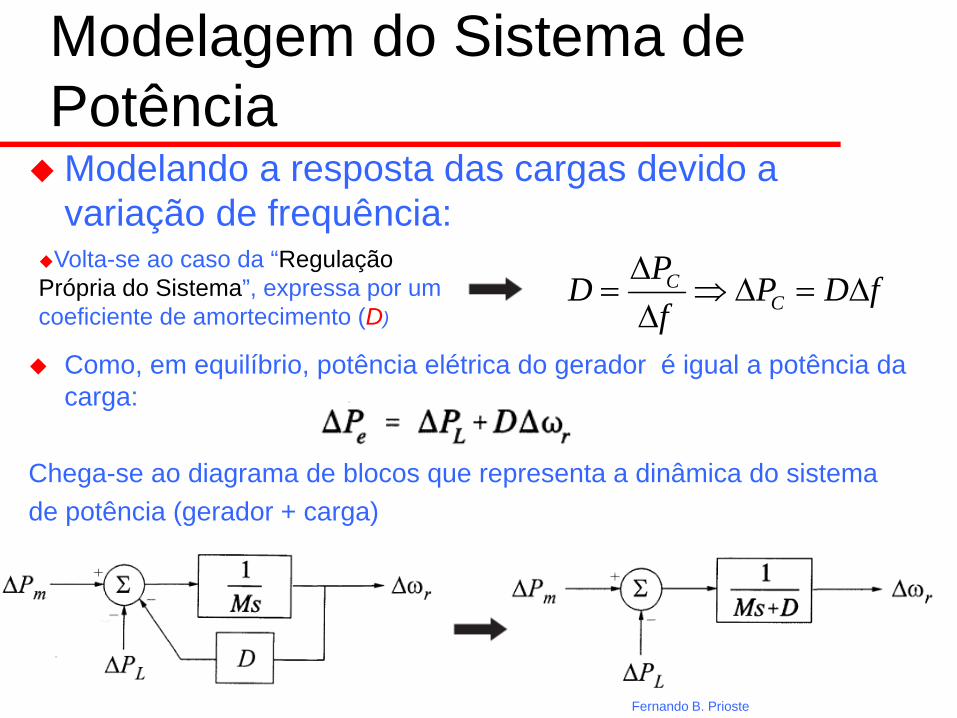
Modelagem do Sistema de PotênciaModelando a resposta das cargas devido a variação de frequência:
Como, em equilíbrio, potência elétrica do gerador é igual a potência da carga:
Chega-se ao diagrama de blocos que representa a dinâmica do sistemade potência (gerador + carga)
4
Volta-se ao caso da “Regulação Própria do Sistema”, expressa por um coeficiente de amortecimento (D)
CC
PD P D ff
Δ= ⇒ Δ = ΔΔ
Fernando B. Prioste
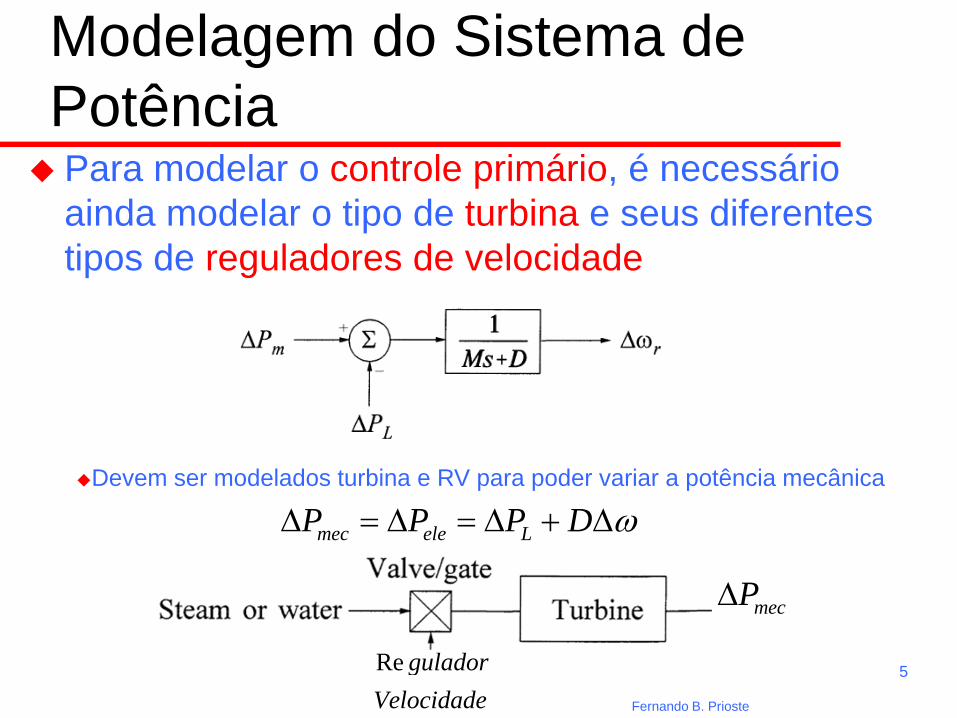
Modelagem do Sistema de PotênciaPara modelar o controle primário, é necessário ainda modelar o tipo de turbina e seus diferentes tipos de reguladores de velocidade
5
Devem ser modelados turbina e RV para poder variar a potência mecânica
mec ele LP P P D ωΔ = Δ = Δ + Δ
mecPΔ
Re guladorVelocidade Fernando B. Prioste
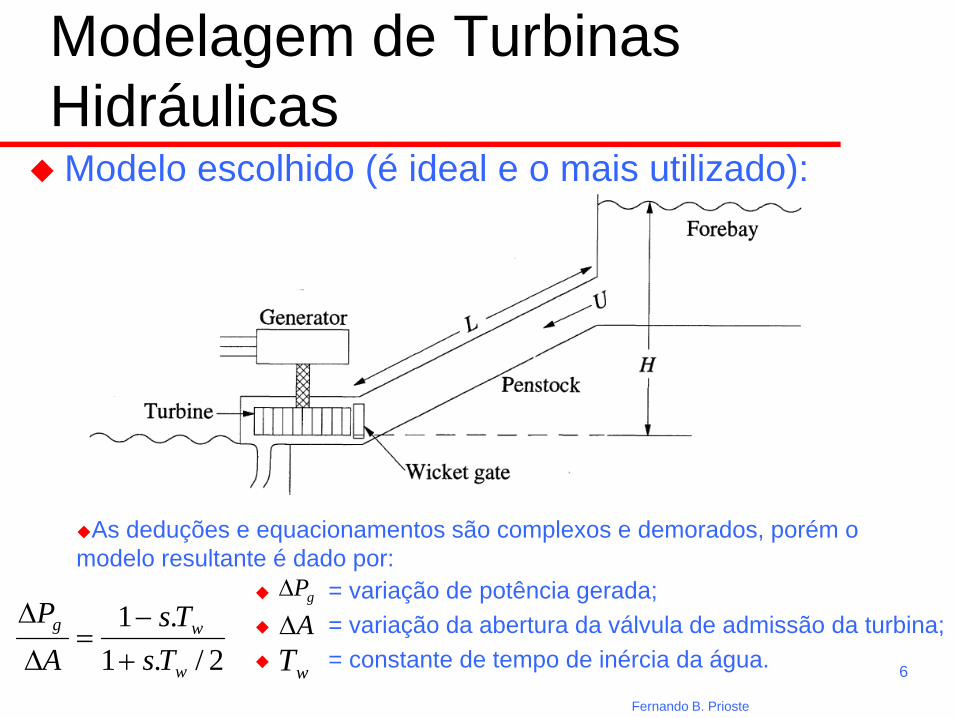
Modelagem de Turbinas HidráulicasModelo escolhido (é ideal e o mais utilizado):
6
As deduções e equacionamentos são complexos e demorados, porém o modelo resultante é dado por:
2/.1.1
w
wg
TsTs
AP
+−
=Δ
Δ= variação de potência gerada;= variação da abertura da válvula de admissão da turbina;= constante de tempo de inércia da água.
gPΔAΔwT
Fernando B. Prioste
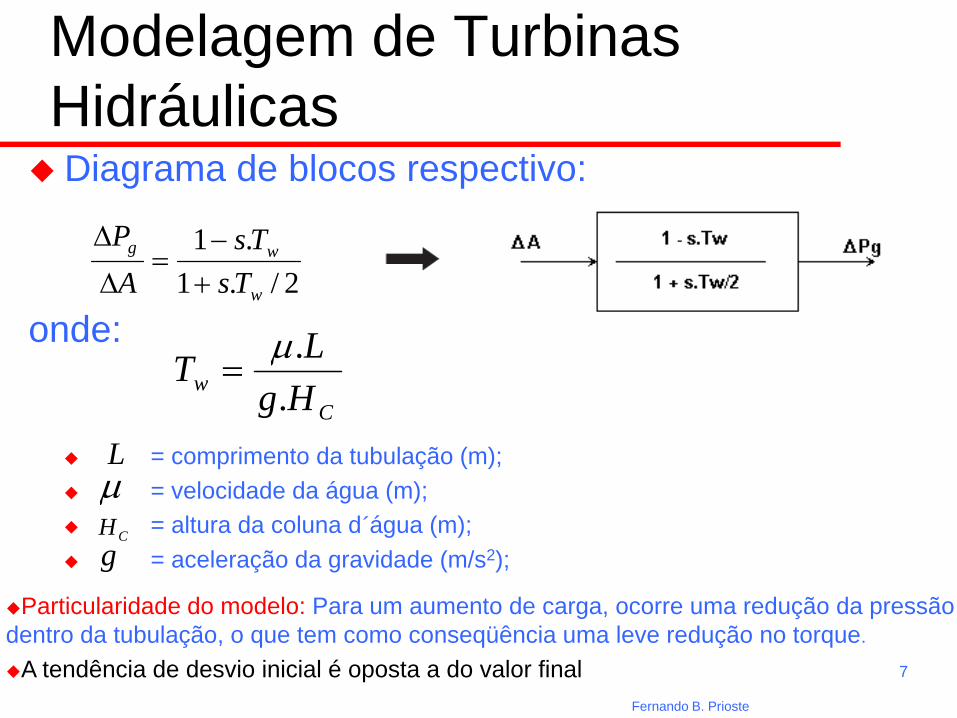
Modelagem de Turbinas HidráulicasDiagrama de blocos respectivo:
onde:
7
2/.1.1
w
wg
TsTs
AP
+−
=Δ
Δ
Cw Hg
LT..μ
=
= comprimento da tubulação (m);= velocidade da água (m);= altura da coluna d´água (m);= aceleração da gravidade (m/s2);
Lμ
gCH
Particularidade do modelo: Para um aumento de carga, ocorre uma redução da pressão dentro da tubulação, o que tem como conseqüência uma leve redução no torque.
A tendência de desvio inicial é oposta a do valor finalFernando B. Prioste
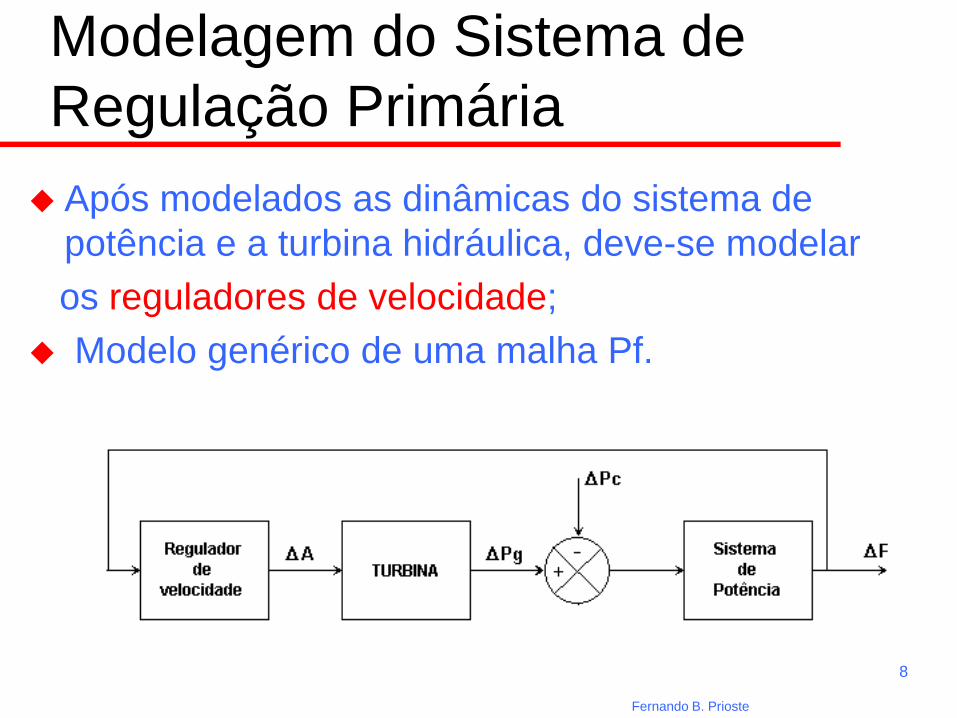
Modelagem do Sistema de Regulação PrimáriaApós modelados as dinâmicas do sistema de potência e a turbina hidráulica, deve-se modelaros reguladores de velocidade;Modelo genérico de uma malha Pf.
8
Fernando B. Prioste
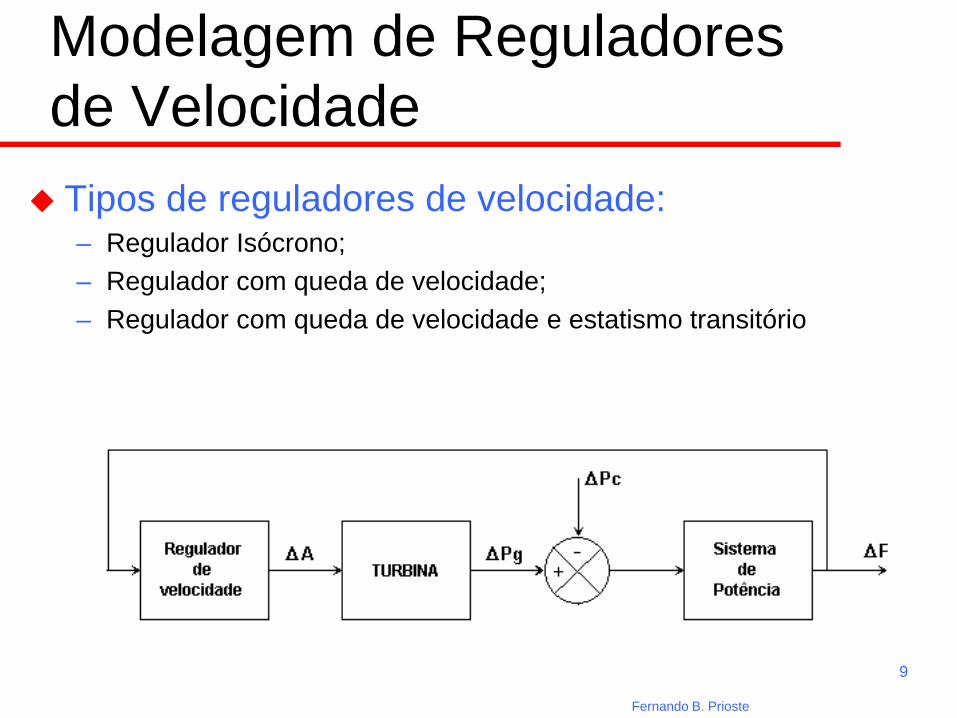
Modelagem de Reguladores de VelocidadeTipos de reguladores de velocidade:– Regulador Isócrono;– Regulador com queda de velocidade;– Regulador com queda de velocidade e estatismo transitório
9
Fernando B. Prioste
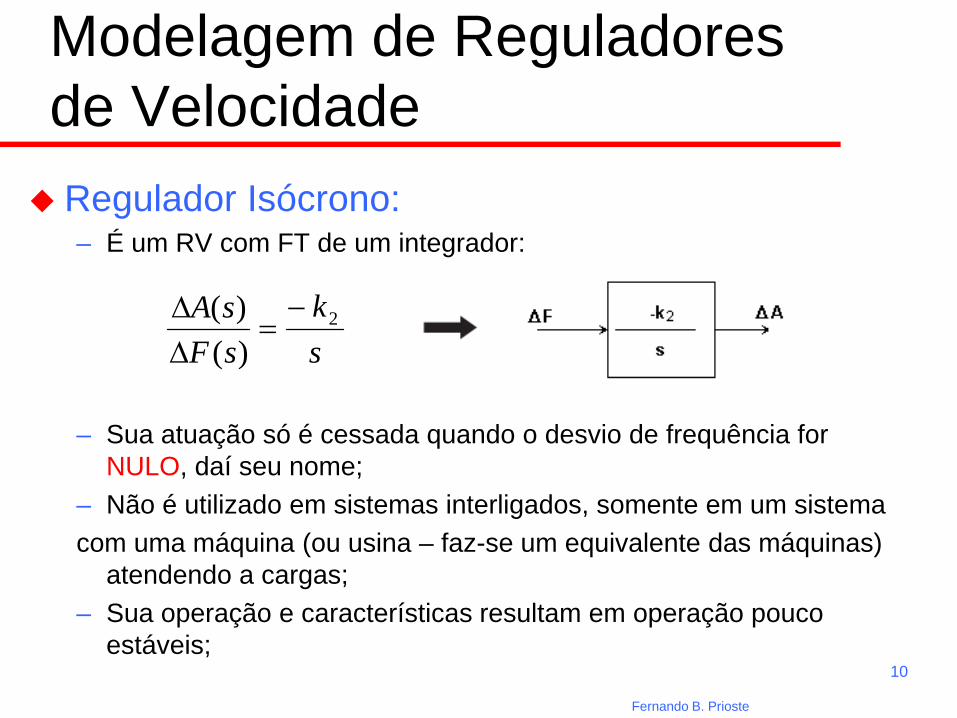
Modelagem de Reguladores de VelocidadeRegulador Isócrono:– É um RV com FT de um integrador:
– Sua atuação só é cessada quando o desvio de frequência for NULO, daí seu nome;
– Não é utilizado em sistemas interligados, somente em um sistemacom uma máquina (ou usina – faz-se um equivalente das máquinas)
atendendo a cargas;– Sua operação e características resultam em operação pouco
estáveis;10
sk
sFsA 2
)()( −=
ΔΔ
Fernando B. Prioste
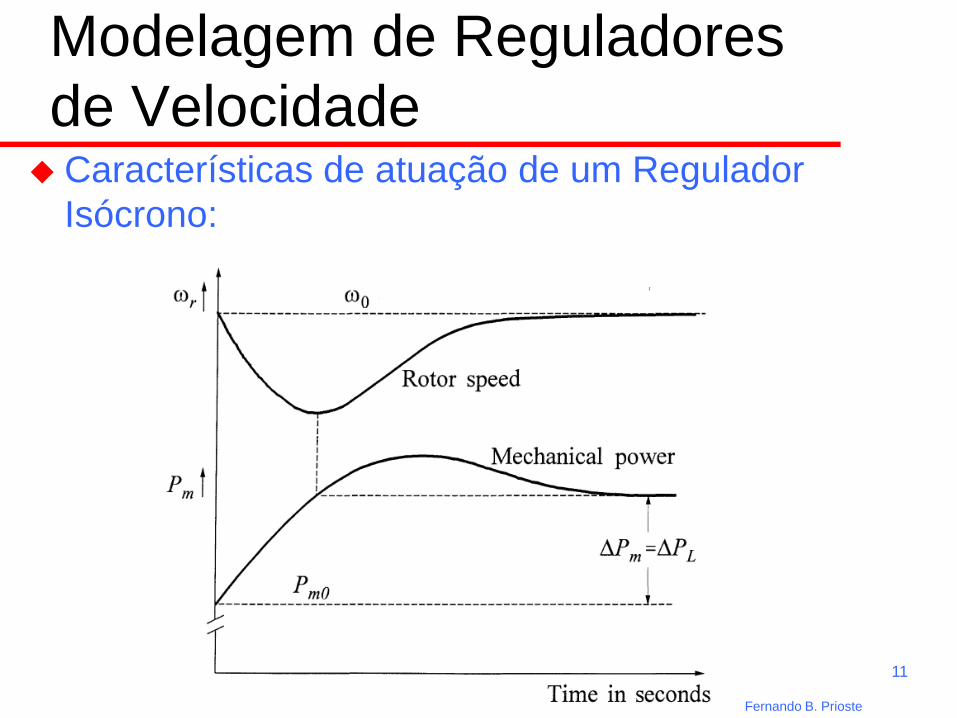
Modelagem de Reguladores de VelocidadeCaracterísticas de atuação de um Regulador Isócrono:
11
Fernando B. Prioste
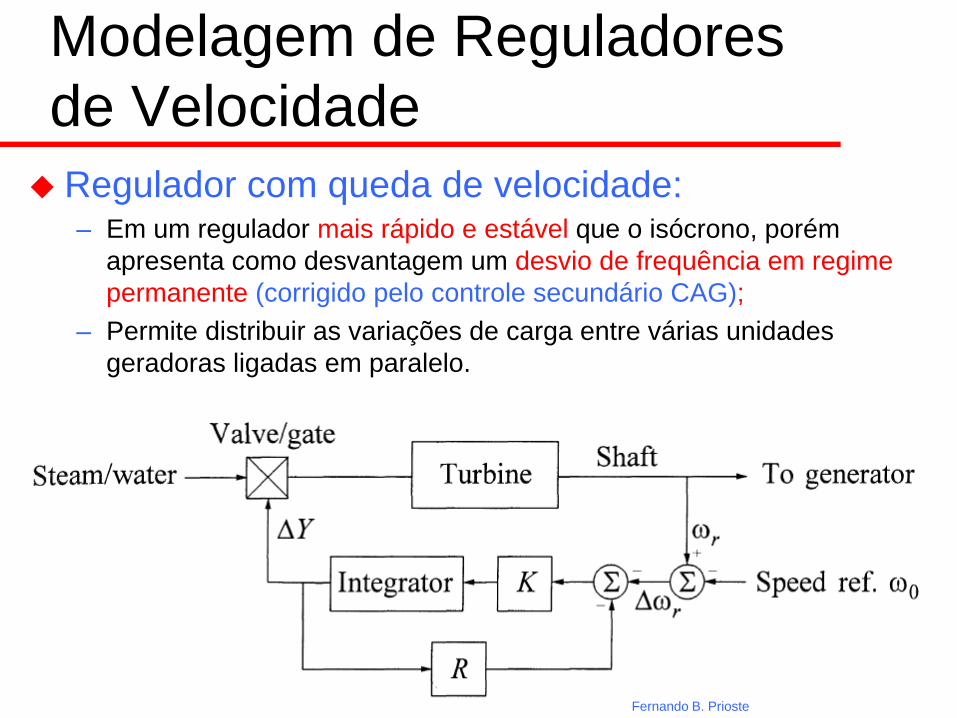
Modelagem de Reguladores de VelocidadeRegulador com queda de velocidade:– Em um regulador mais rápido e estável que o isócrono, porém
apresenta como desvantagem um desvio de frequência em regime permanente (corrigido pelo controle secundário CAG);
– Permite distribuir as variações de carga entre várias unidades geradoras ligadas em paralelo.
12
Fernando B. Prioste
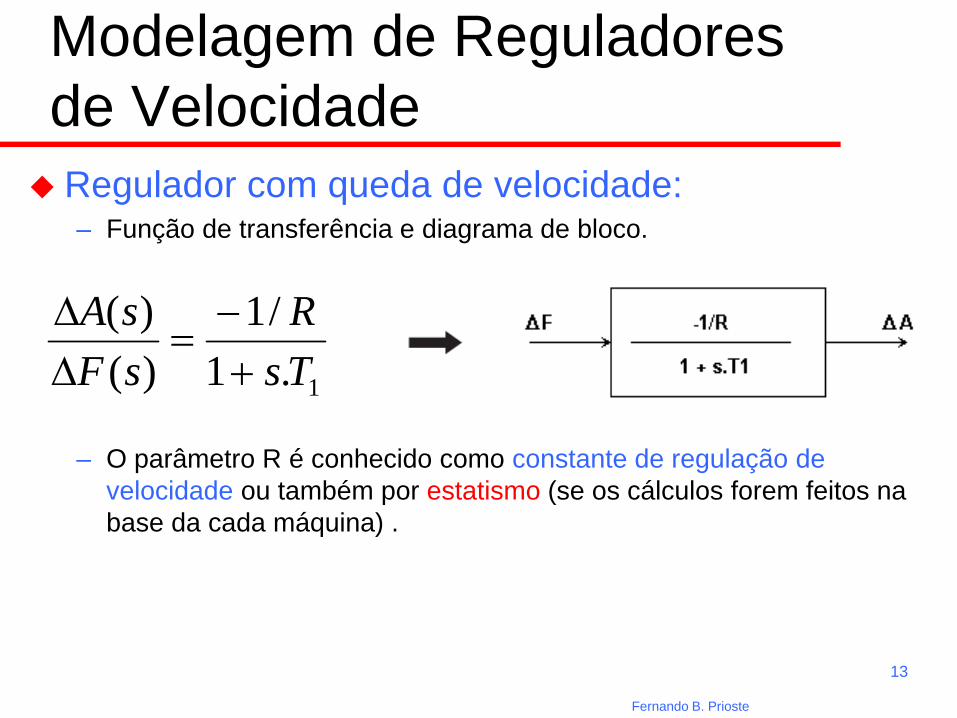
Modelagem de Reguladores de VelocidadeRegulador com queda de velocidade:– Função de transferência e diagrama de bloco.
– O parâmetro R é conhecido como constante de regulação de velocidade ou também por estatismo (se os cálculos forem feitos na base da cada máquina) .
13
1.1/1
)()(
TsR
sFsA
+−
=ΔΔ
Fernando B. Prioste
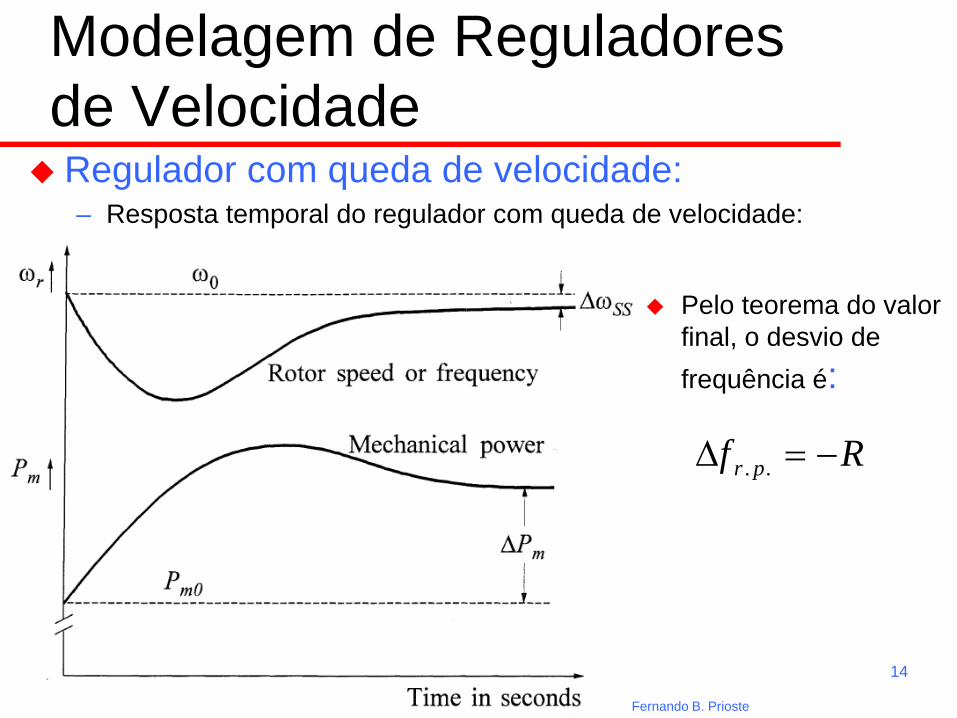
Modelagem de Reguladores de VelocidadeRegulador com queda de velocidade:– Resposta temporal do regulador com queda de velocidade:
14
Rf pr −=Δ ..
Pelo teorema do valor final, o desvio de frequência é:
Fernando B. Prioste
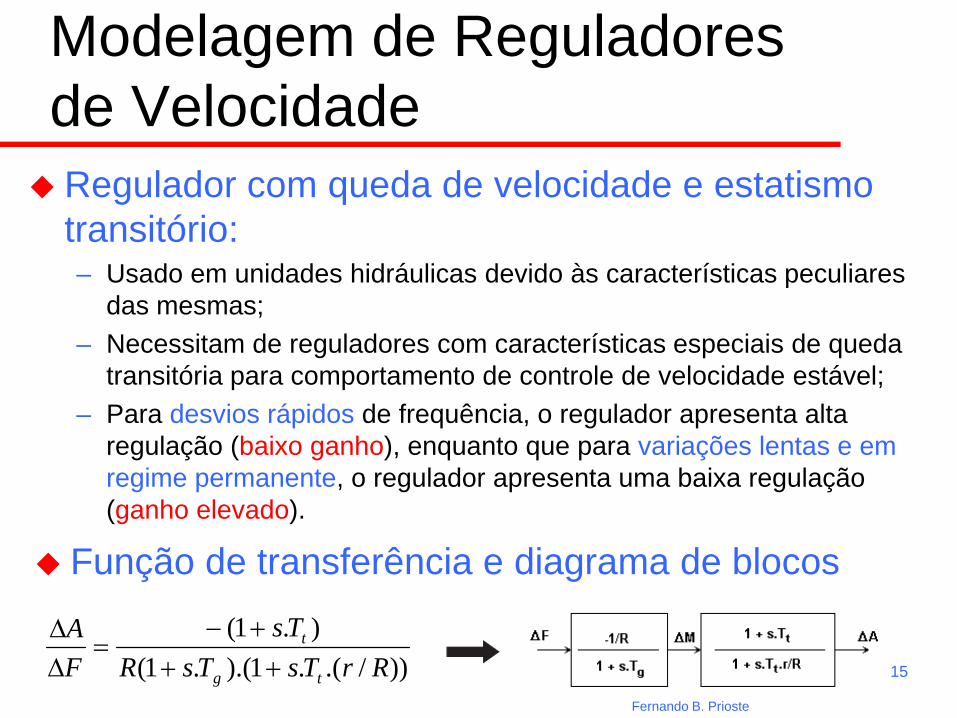
Modelagem de Reguladores de VelocidadeRegulador com queda de velocidade e estatismo transitório:– Usado em unidades hidráulicas devido às características peculiares
das mesmas;– Necessitam de reguladores com características especiais de queda
transitória para comportamento de controle de velocidade estável;– Para desvios rápidos de frequência, o regulador apresenta alta
regulação (baixo ganho), enquanto que para variações lentas e em regime permanente, o regulador apresenta uma baixa regulação (ganho elevado).
15))/.(.1).(.1().1(
RrTsTsRTs
FA
tg
t
+++−
=ΔΔ
Função de transferência e diagrama de blocos
Fernando B. Prioste
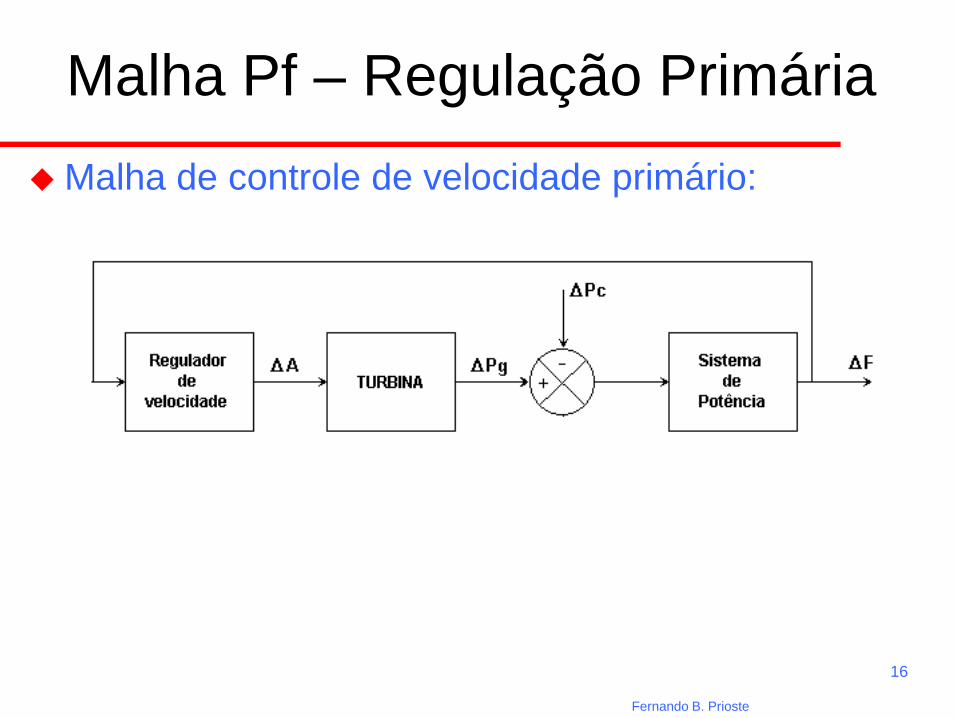
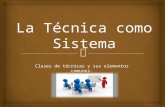
Malha de controle de velocidade primário:
16
Malha Pf – Regulação Primária
Fernando B. Prioste
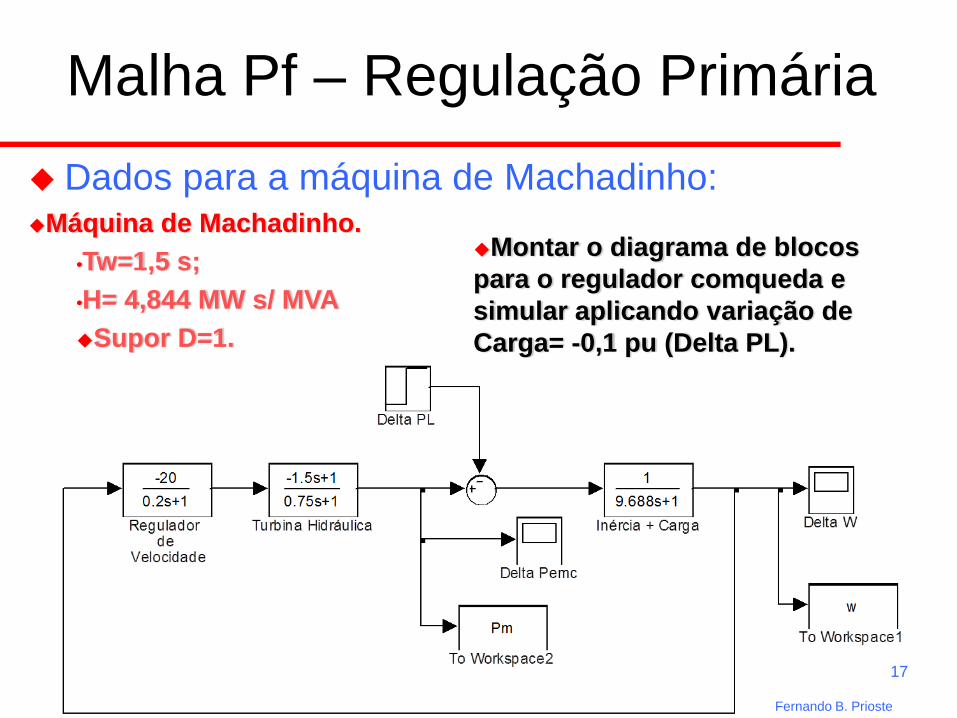
Dados para a máquina de Machadinho:
17
Malha Pf – Regulação Primária
Máquina de Machadinho. •Tw=1,5 s;•H= 4,844 MW s/ MVA
Supor D=1.
Montar o diagrama de blocos para o regulador comqueda e simular aplicando variação de Carga= -0,1 pu (Delta PL).
Fernando B. Prioste
18
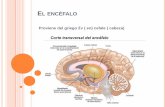
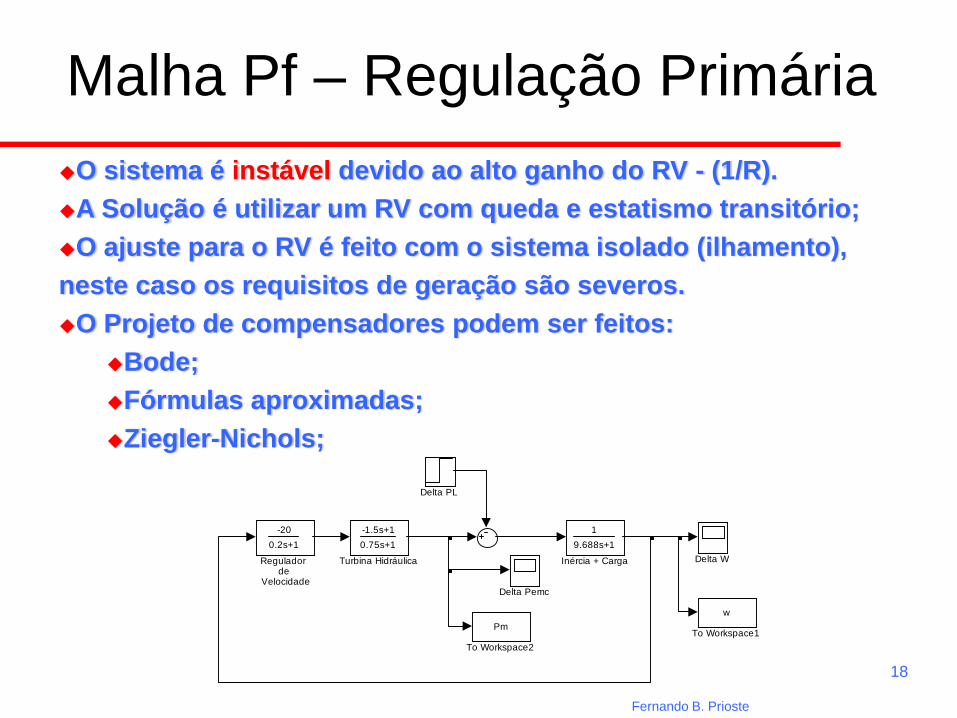
Malha Pf – Regulação Primária
-1.5s+10.75s+1
Turbina Hidráulica
Pm
To Workspace2
w
To Workspace1
-200.2s+1
Regulador de
Velocidade
19.688s+1
Inércia + Carga Delta W
Delta Pemc
Delta PL
O sistema é instável devido ao alto ganho do RV - (1/R).A Solução é utilizar um RV com queda e estatismo transitório;O ajuste para o RV é feito com o sistema isolado (ilhamento),
neste caso os requisitos de geração são severos.O Projeto de compensadores podem ser feitos:
Bode;Fórmulas aproximadas;Ziegler-Nichols;
Fernando B. Prioste
19
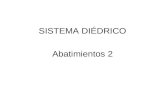
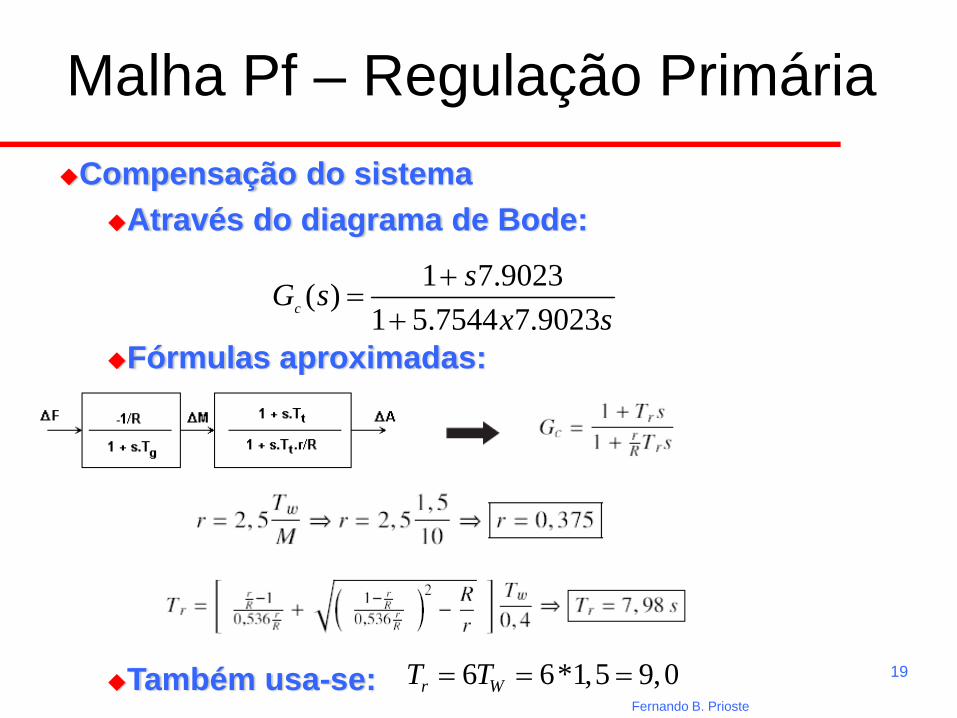
Malha Pf – Regulação PrimáriaCompensação do sistema
Através do diagrama de Bode:
Fórmulas aproximadas:
Também usa-se:
sxssGc 9023.77544.51
9023.71)(+
+=
6 6*1,5 9,0r WT T= = =Fernando B. Prioste
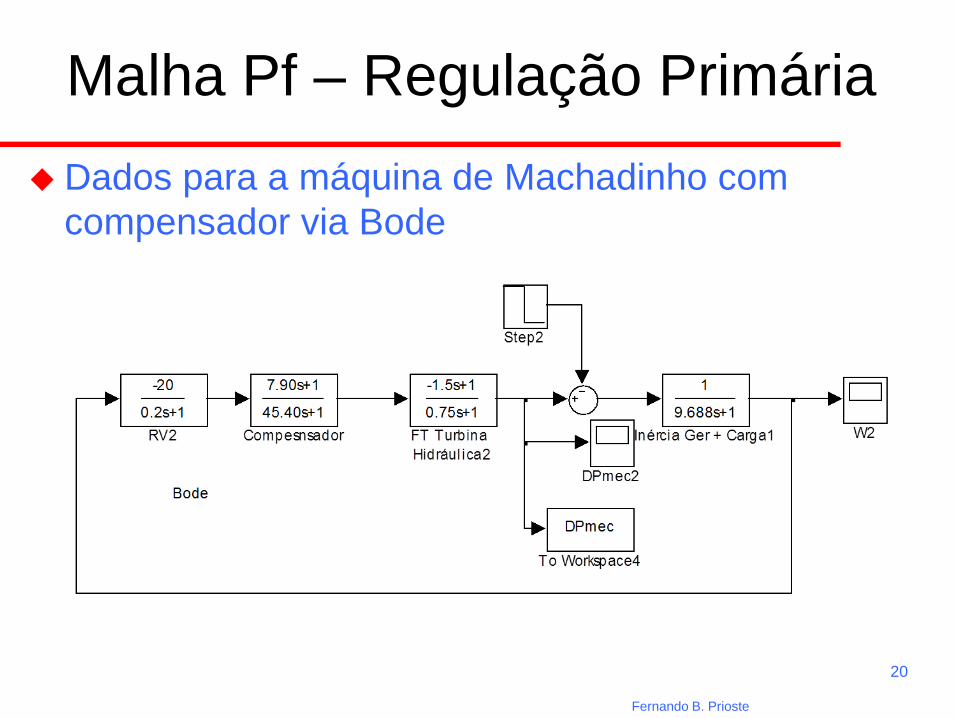
Dados para a máquina de Machadinho com compensador via Bode
20
Malha Pf – Regulação Primária
Fernando B. Prioste
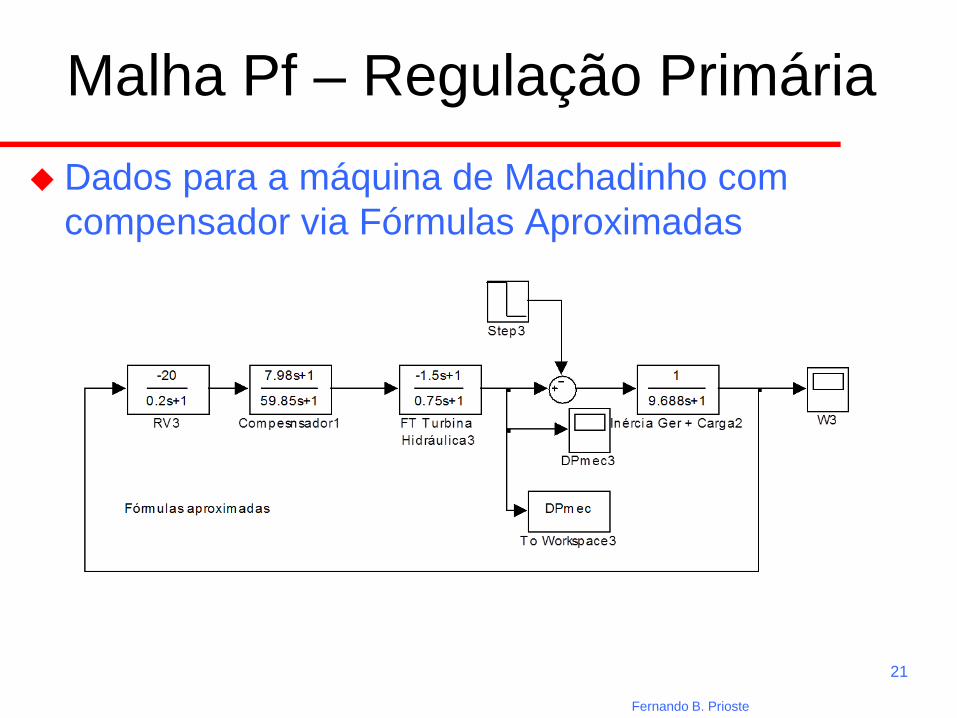
Dados para a máquina de Machadinho com compensador via Fórmulas Aproximadas
21
Malha Pf – Regulação Primária
Fernando B. Prioste
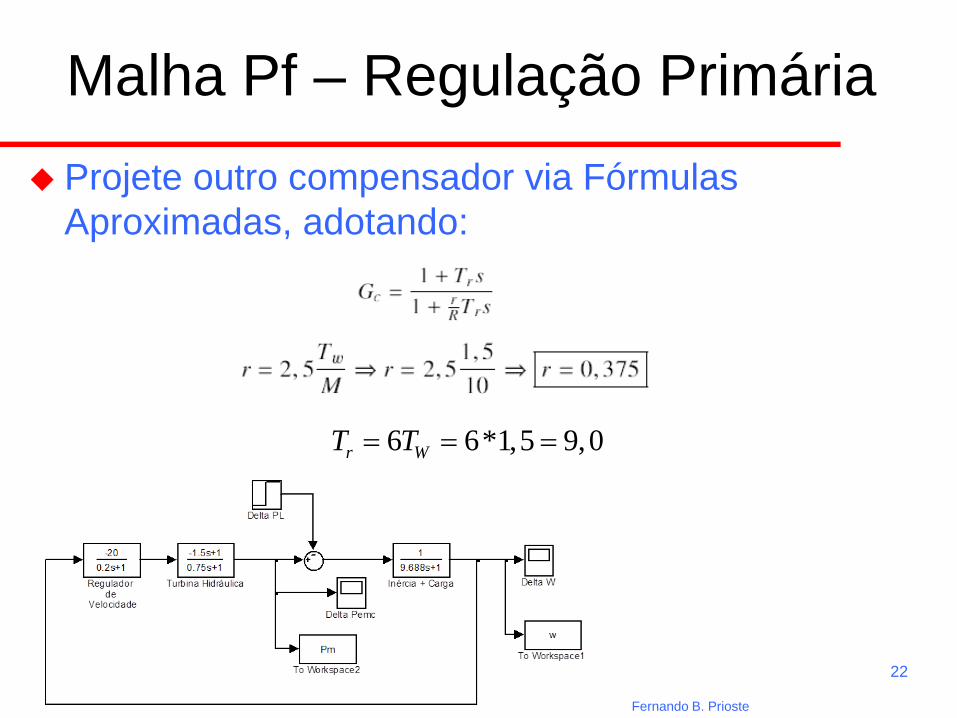
Projete outro compensador via Fórmulas Aproximadas, adotando:
22
Malha Pf – Regulação Primária
6 6*1,5 9,0r WT T= = =
Fernando B. Prioste
Compare os resultados para os três sistemas compensados;Elimine a auto-regulação da carga (D=0) e compare com o respectivo caso considerando D=1;
Teste a robustez dos projetos variando o valor de M:– Exemplo: M=6 ou M=12
23
Malha Pf – Regulação Primária
Fernando B. Prioste