![Movimento Circular Uniforme · Movimento Circular Uniforme . ... unidade de tempo Unidades no S.I.: [T] ... Calcule a velocidade angular e tangencial da extremidade do ponteiro](https://static.fdocument.org/doc/165x107/5c633e1e09d3f2833b8b45e8/movimento-circular-uniforme-movimento-circular-uniforme-unidade-de-tempo.jpg)
Extremidade Sentido Direção -...
28
Matemática Aplicada II - ℎ 33 α v v Origem Extremidade Capítulo 2 – Vetores 1 Grandezas Escalares e Vetoriais Existem dois tipos de grandezas: as escalares e as vetoriais. As grandezas escalares são aquelas que ficam definidas por apenas um número real, acompanhado de uma unidade adequada. Exemplos: comprimento (m), área (m 2 ), massa (kg) e temperatura ( o C). O termo vetor é usado para indicar uma grandeza vetorial. Um vetor é caracterizado por seu comprimento e sua direção, acompanhado de uma unidade adequada. Exemplos: deslocamento (m), velocidade (m/s) e força (kN). O vetor é geralmente representado por um segmento orientado, isto é, escolhe-se um sentido de percurso considerado positivo o qual é indicado por uma seta. Vetor Nulo O vetor nulo, 0 , tem comprimento zero e é o único vetor que não tem direção. Notação O nome do vetor em negrito(v) seta acima do nome do vetor ( ).
Transcript of Extremidade Sentido Direção -...
Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 33
α
vv
Origem
ExtremidadeSentido
Direção
Módulo ou tamanho
Capítulo 2 – Vetores
1 Grandezas Escalares e Vetoriais
Existem dois tipos de grandezas: as escalares e as vetoriais.
As grandezas escalares são aquelas que ficam definidas por apenas um número real, acompanhado de uma unidade adequada. Exemplos:
comprimento (m), área (m2), massa (kg) e temperatura (oC).
O termo vetor é usado para indicar uma grandeza vetorial. Um vetor
é caracterizado por seu comprimento e sua direção, acompanhado de uma unidade adequada. Exemplos: deslocamento (m), velocidade (m/s) e força (kN).
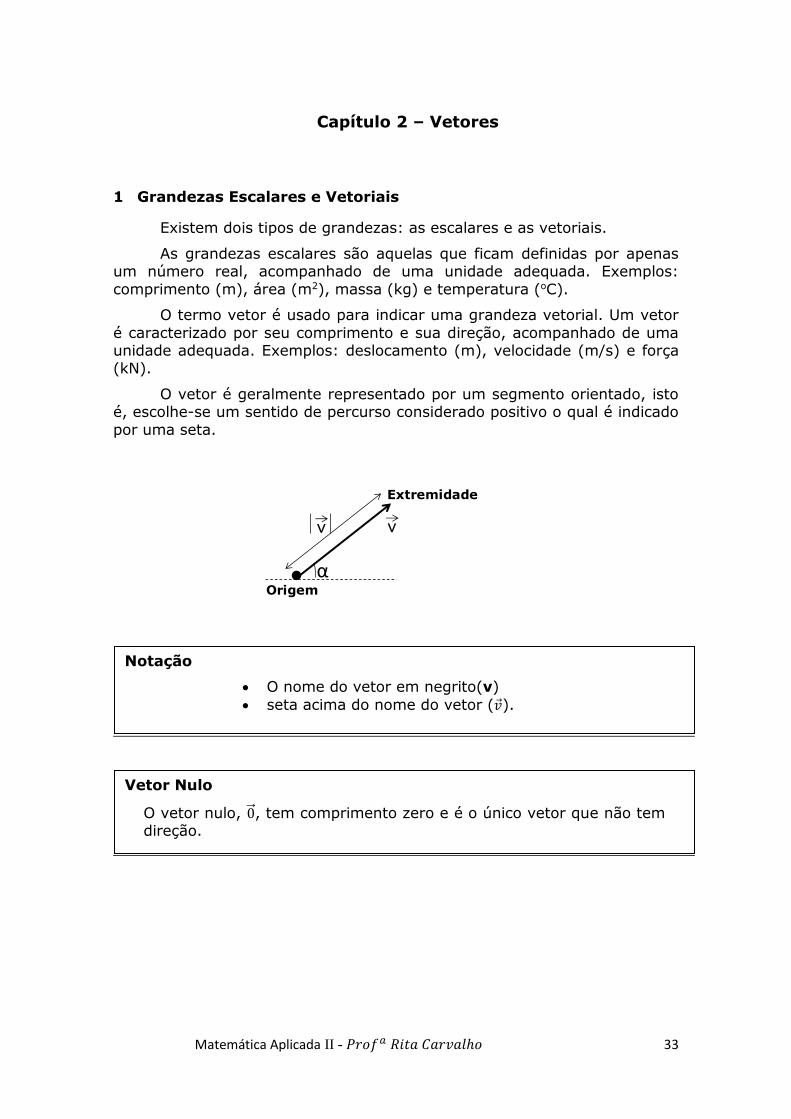
O vetor é geralmente representado por um segmento orientado, isto é, escolhe-se um sentido de percurso considerado positivo o qual é indicado
por uma seta.
Vetor Nulo
O vetor nulo, 0 , tem comprimento zero e é o único vetor que não tem direção.
Notação
O nome do vetor em negrito(v)
seta acima do nome do vetor (𝑣 ).
Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 34
2. Vetores Equivalentes
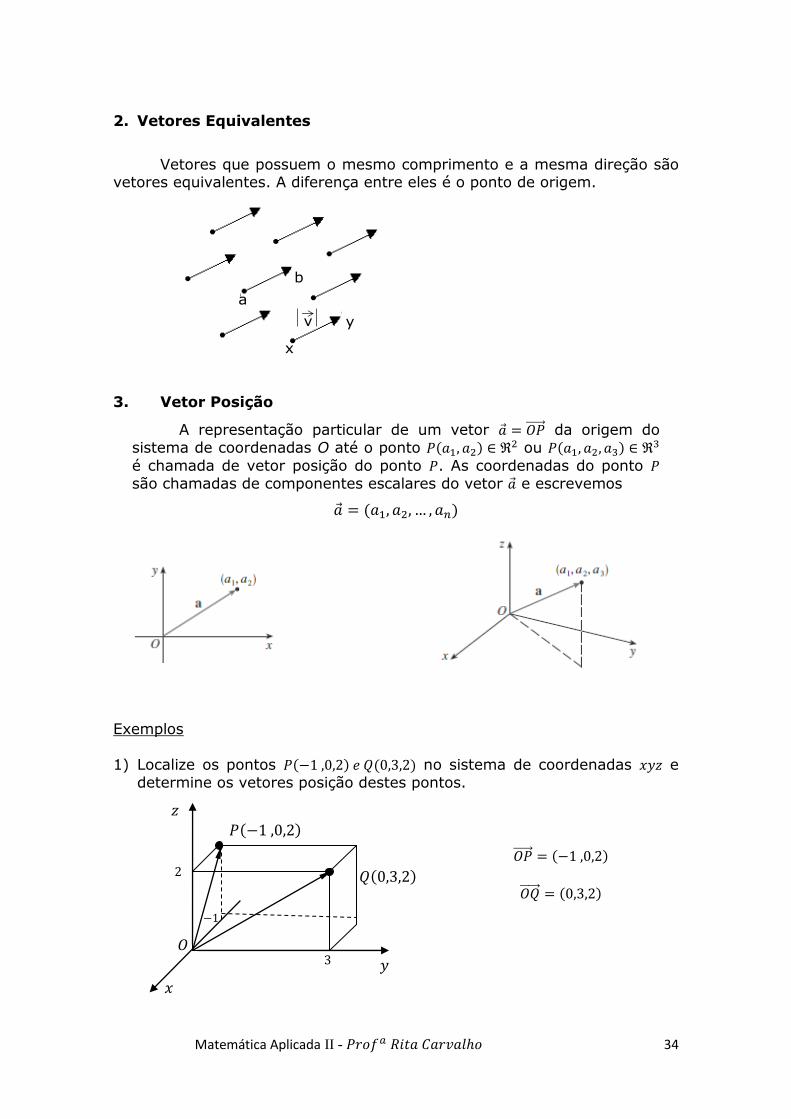
Vetores que possuem o mesmo comprimento e a mesma direção são vetores equivalentes. A diferença entre eles é o ponto de origem.
3. Vetor Posição
A representação particular de um vetor 𝑎 = 𝑂𝑃 da origem do
sistema de coordenadas O até o ponto 𝑃(𝑎1, 𝑎2) ∈ ℜ2 ou 𝑃(𝑎1, 𝑎2, 𝑎3) ∈ ℜ3
é chamada de vetor posição do ponto 𝑃. As coordenadas do ponto 𝑃
são chamadas de componentes escalares do vetor 𝑎 e escrevemos
𝑎 = (𝑎1, 𝑎2, … , 𝑎𝑛)
Exemplos
1) Localize os pontos 𝑃(−1 ,0,2) 𝑒 𝑄(0,3,2) no sistema de coordenadas 𝑥𝑦𝑧 e
determine os vetores posição destes pontos.
𝑂𝑃 = (−1 ,0,2)
𝑂𝑄 = (0,3,2)
v
x
y
a
b
𝑃(−1 ,0,2)
𝑄(0,3,2)
𝑂
𝑥
𝑦
𝑧
3
−1
2
Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 35
4. Operações com Vetores
4.1. Soma
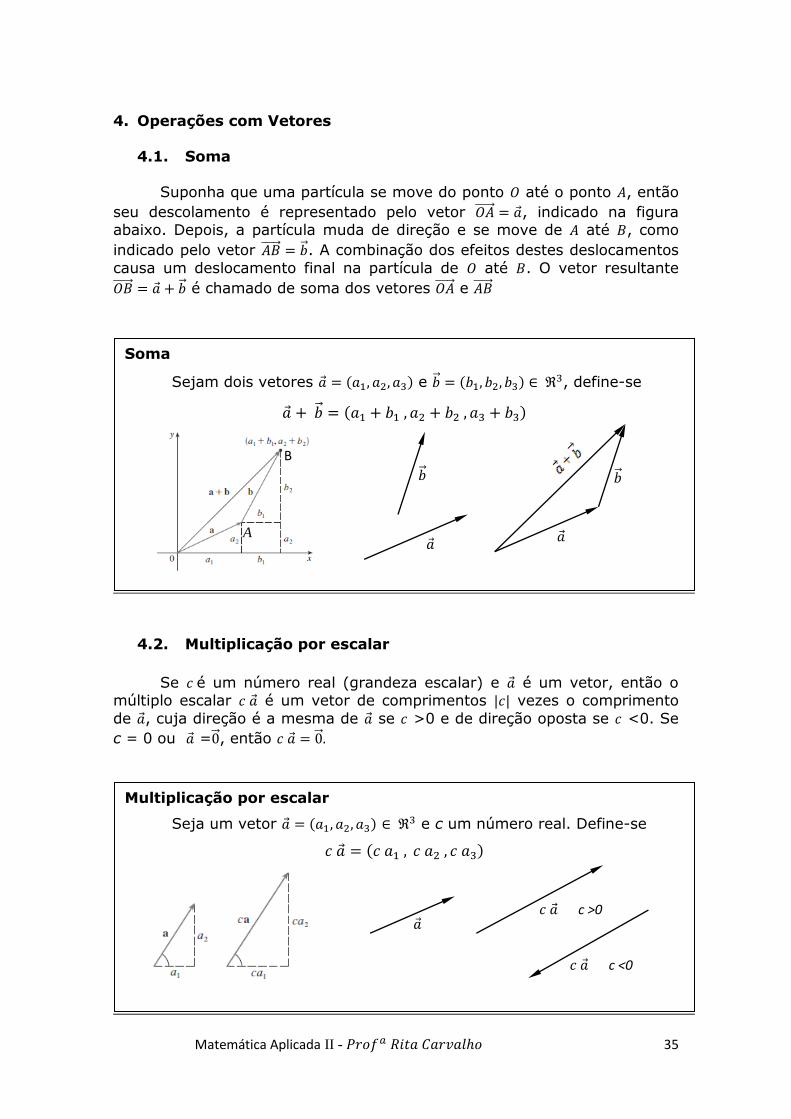
Suponha que uma partícula se move do ponto 𝑂 até o ponto 𝐴, então
seu descolamento é representado pelo vetor 𝑂𝐴 = 𝑎 , indicado na figura
abaixo. Depois, a partícula muda de direção e se move de 𝐴 até 𝐵, como
indicado pelo vetor 𝐴𝐵 = �� . A combinação dos efeitos destes deslocamentos
causa um deslocamento final na partícula de 𝑂 até 𝐵. O vetor resultante
𝑂𝐵 = 𝑎 + �� é chamado de soma dos vetores 𝑂𝐴 e 𝐴𝐵
4.2. Multiplicação por escalar
Se 𝑐 é um número real (grandeza escalar) e 𝑎 é um vetor, então o
múltiplo escalar 𝑐 𝑎 é um vetor de comprimentos |𝑐| vezes o comprimento
de 𝑎 , cuja direção é a mesma de 𝑎 se 𝑐 >0 e de direção oposta se 𝑐 <0. Se
c = 0 ou 𝑎 =0 , então 𝑐 𝑎 = 0 .
Multiplicação por escalar
Seja um vetor 𝑎 = (𝑎1, 𝑎2, 𝑎3) ∈ ℜ3 e c um número real. Define-se
𝑐 𝑎 = (𝑐 𝑎1 , 𝑐 𝑎2 , 𝑐 𝑎3)
Soma
Sejam dois vetores 𝑎 = (𝑎1, 𝑎2, 𝑎3) e �� = (𝑏1, 𝑏2, 𝑏3) ∈ ℜ3, define-se
𝑎 + �� = (𝑎1 + 𝑏1 , 𝑎2 + 𝑏2 , 𝑎3 + 𝑏3)
𝑎
��
𝑎
��
𝑎 𝑐 𝑎 c >0
𝑐 𝑎 c <0
A
B

Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 36
4.3. Subtração
Em particular, o vetor −�� = (−1) �� é um vetor de mesmo comprimento
de �� porém, com direção oposta e é chamado de negativo de �� . Assim o
vetor diferença de 𝑎 e �� significa: 𝑎 − �� = 𝑎 + (−�� )
Exemplos
1) Copie os vetores da figura abaixo e use-os para desenhar os seguintes
vetores:
a) �� + 𝑣 b) �� − 𝑣 c) 2𝑣 d) �� + 𝑣 + ��
Propriedades
Sejam 𝑎 , 𝑏 vetores em ℜ𝑛 e c e d escalares então:
1) 𝑎 + �� = �� + 𝑎 2) 𝑎 + (�� + 𝑐 ) = (𝑎 + �� ) + 𝑐
3) 𝑎 + 0 = 𝑎 4) 𝑎 + (−𝑎 ) = 0
5) 𝑐 (𝑎 + �� ) = 𝑐 𝑎 + 𝑐 �� 6) (𝑐 + 𝑑) 𝑎 = 𝑐 𝑎 + 𝑑 𝑎
7) (𝑐𝑑)𝑎 = 𝑐 (𝑑 𝑎 ) 8) 1 𝑎 = 𝑎
Subtração
Sejam dois vetores 𝑎 = (𝑎1, 𝑎2, 𝑎3) e �� = (𝑏1, 𝑏2, 𝑏3) ∈ ℜ3, define-se
𝑎 − �� = (𝑎1 − 𝑏1 , 𝑎2 − 𝑏2 , 𝑎3 − 𝑏3)
𝑎
��
𝑎
�� 𝑎
−�� 𝑜𝑢
Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 37
2) Dados os vetores 𝑎 = (1, 3,−1) e �� = (2, 0, −4) encontre o vetor
𝑐 = −3𝑎 + 0.5 ��
𝑐 = −3 (1, 3, −1) + 0.5(2,0,4) = (−3,9,3) + (1,0,2) = (−2, 9, 5)
3) Dados os vetores 𝑎 = (2,−1,1) e �� = (3, 2,0) encontre o vetor 𝑐 = 2(𝑎 − �� )
𝑐 = 2 [ (2, −1,1) − (3,2,0)] = 2[ (2 − 3,−1 − 2, 1 − 0)] = 2(−1,−3,1)
𝑐 = (−2 ,−6, 2)
5. Vetores entre Dois Pontos
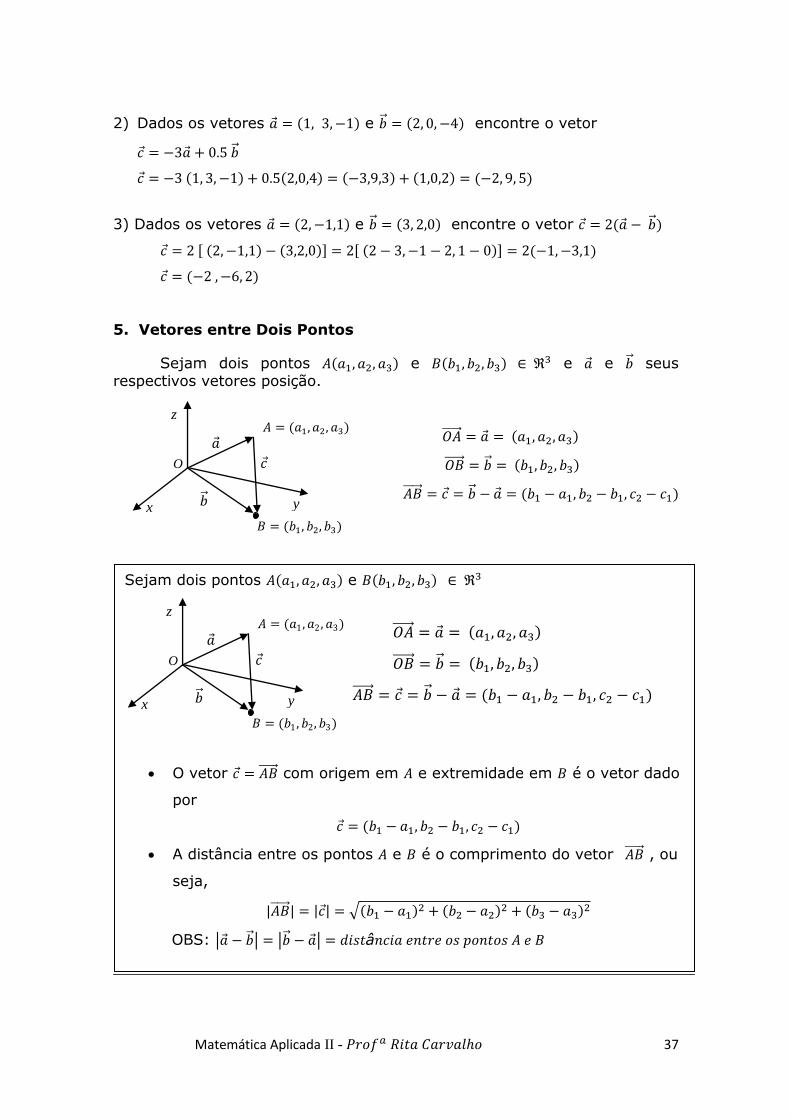
Sejam dois pontos 𝐴(𝑎1, 𝑎2, 𝑎3) e 𝐵(𝑏1, 𝑏2, 𝑏3) ∈ ℜ3 e 𝑎 e �� seus respectivos vetores posição.
𝑂𝐴 = 𝑎 = (𝑎1, 𝑎2, 𝑎3)
𝑂𝐵 = �� = (𝑏1, 𝑏2, 𝑏3)
𝐴𝐵 = 𝑐 = �� − 𝑎 = (𝑏1 − 𝑎1, 𝑏2 − 𝑏1, 𝑐2 − 𝑐1)
Sejam dois pontos 𝐴(𝑎1, 𝑎2, 𝑎3) e 𝐵(𝑏1, 𝑏2, 𝑏3) ∈ ℜ3
O vetor 𝑐 = 𝐴𝐵 com origem em 𝐴 e extremidade em 𝐵 é o vetor dado
por
𝑐 = (𝑏1 − 𝑎1, 𝑏2 − 𝑏1, 𝑐2 − 𝑐1)
A distância entre os pontos 𝐴 e 𝐵 é o comprimento do vetor 𝐴𝐵 , ou
seja,
|𝐴𝐵 | = |𝑐 | = √(𝑏1 − 𝑎1)2 + (𝑏2 − 𝑎2)
2 + (𝑏3 − 𝑎3)2
OBS: |𝑎 − �� | = |�� − 𝑎 | = 𝑑𝑖𝑠𝑡â𝑛𝑐𝑖𝑎 𝑒𝑛𝑡𝑟𝑒 𝑜𝑠 𝑝𝑜𝑛𝑡𝑜𝑠 𝐴 𝑒 𝐵
z
x y
𝐵 = (𝑏1 , 𝑏2, 𝑏3)
𝑐
𝐴 = (𝑎1 , 𝑎2 , 𝑎3)
𝑎
��
O
z
x y
𝐵 = (𝑏1, 𝑏2, 𝑏3)
𝑐
𝐴 = (𝑎1, 𝑎2, 𝑎3) 𝑎
��
O
𝑂𝐴 = 𝑎 = (𝑎1, 𝑎2, 𝑎3)
𝑂𝐵 = �� = (𝑏1, 𝑏2, 𝑏3)
𝐴𝐵 = 𝑐 = �� − 𝑎 = (𝑏1 − 𝑎1, 𝑏2 − 𝑏1, 𝑐2 − 𝑐1)
Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 38
Exemplos:
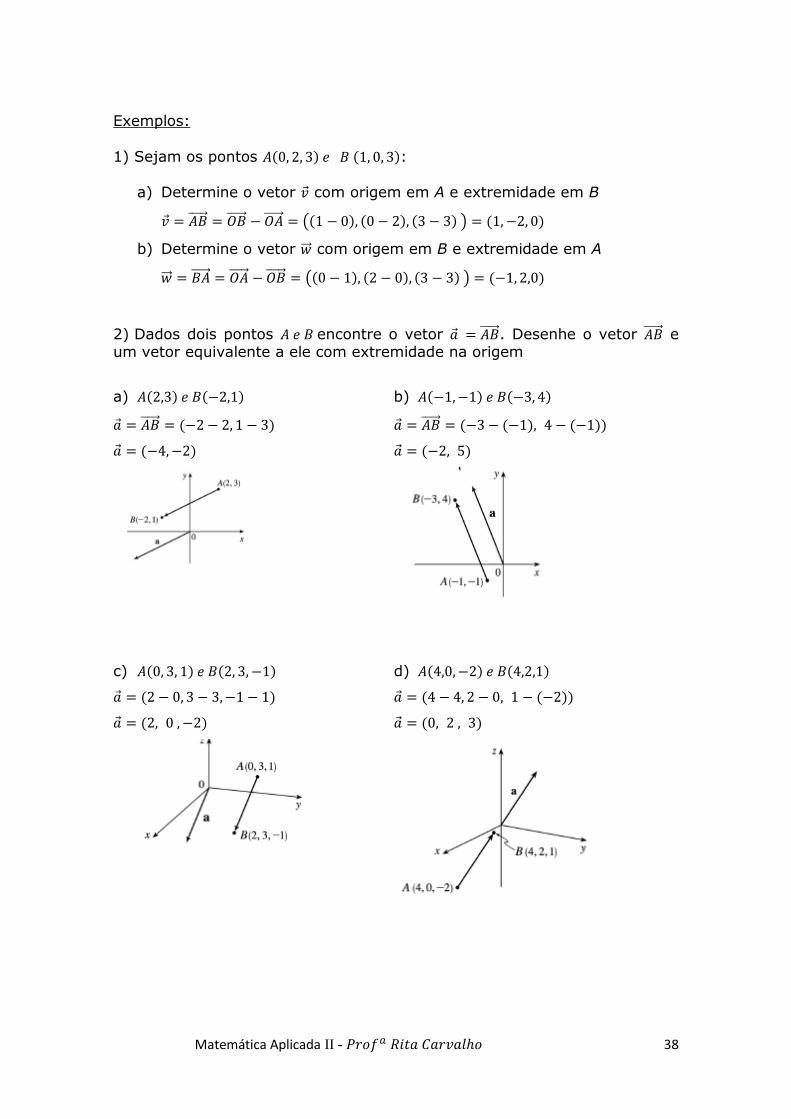
1) Sejam os pontos 𝐴(0, 2, 3) 𝑒 𝐵 (1, 0, 3):
a) Determine o vetor 𝑣 com origem em A e extremidade em B
𝑣 = 𝐴𝐵 = 𝑂𝐵 − 𝑂𝐴 = ((1 − 0), (0 − 2), (3 − 3) ) = (1,−2, 0)
b) Determine o vetor �� com origem em B e extremidade em A
�� = 𝐵𝐴 = 𝑂𝐴 − 𝑂𝐵 = ((0 − 1), (2 − 0), (3 − 3) ) = (−1, 2,0)
2) Dados dois pontos 𝐴 𝑒 𝐵 encontre o vetor 𝑎 = 𝐴𝐵 . Desenhe o vetor 𝐴𝐵 e um vetor equivalente a ele com extremidade na origem
a) 𝐴(2,3) 𝑒 𝐵(−2,1)
𝑎 = 𝐴𝐵 = (−2 − 2, 1 − 3)
𝑎 = (−4,−2)
b) 𝐴(−1,−1) 𝑒 𝐵(−3, 4)
𝑎 = 𝐴𝐵 = (−3 − (−1), 4 − (−1))
𝑎 = (−2, 5)
c) 𝐴(0, 3, 1) 𝑒 𝐵(2, 3, −1)
𝑎 = (2 − 0, 3 − 3,−1 − 1)
𝑎 = (2, 0 , −2)
d) 𝐴(4,0,−2) 𝑒 𝐵(4,2,1)
𝑎 = (4 − 4, 2 − 0, 1 − (−2))
𝑎 = (0, 2 , 3)
Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 39
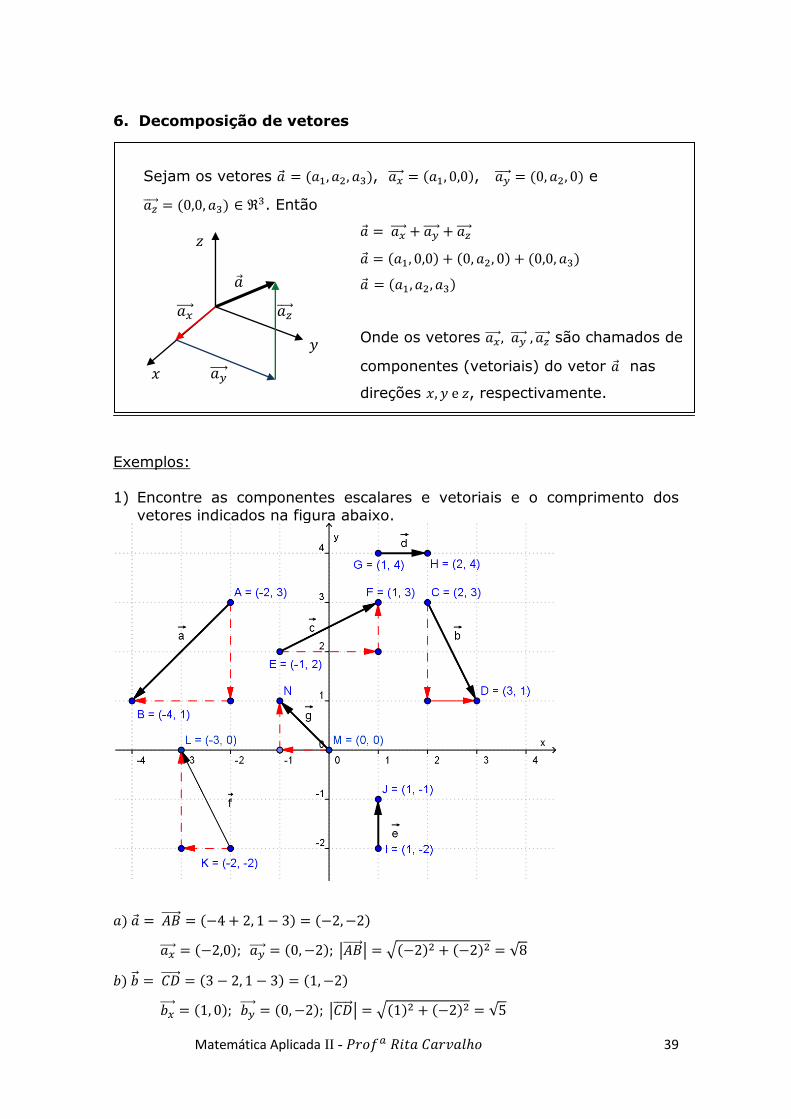
6. Decomposição de vetores
Exemplos:
1) Encontre as componentes escalares e vetoriais e o comprimento dos
vetores indicados na figura abaixo.
𝑎) 𝑎 = 𝐴𝐵 = (−4 + 2, 1 − 3) = (−2,−2)
𝑎𝑥 = (−2,0); 𝑎𝑦 = (0,−2); |𝐴𝐵 | = √(−2)2 + (−2)2 = √8
𝑏) �� = 𝐶𝐷 = (3 − 2, 1 − 3) = (1,−2)
𝑏𝑥 = (1, 0); 𝑏𝑦
= (0,−2); |𝐶𝐷 | = √(1)2 + (−2)2 = √5
Sejam os vetores 𝑎 = (𝑎1, 𝑎2, 𝑎3), 𝑎𝑥 = (𝑎1, 0,0), 𝑎𝑦 = (0, 𝑎2, 0) e
𝑎𝑧 = (0,0, 𝑎3) ∈ ℜ3. Então
𝑎 = 𝑎𝑥 + 𝑎𝑦 + 𝑎𝑧
𝑎 = (𝑎1, 0,0) + (0, 𝑎2, 0) + (0,0, 𝑎3)
𝑎 = (𝑎1, 𝑎2, 𝑎3)
Onde os vetores 𝑎𝑥 , 𝑎𝑦 , 𝑎𝑧 são chamados de
componentes (vetoriais) do vetor 𝑎 nas
direções 𝑥, 𝑦 e 𝑧, respectivamente.
𝑎𝑧
𝑎𝑦
𝑎
𝑥
𝑦
𝑧
𝑎𝑥
Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 40
𝑐) 𝑐 = 𝐸𝐹 = (1 + 1, 3 − 2) = (2, 1)
𝑐𝑥 = (2,0); 𝑐𝑦 = (0,1); |𝐸𝐹 | = √(2)2 + (1)2 = √5
𝑑) 𝑑 = 𝐺𝐻 = (2 − 1, 4 − 4) = (1,0)
𝑑𝑥 = (1,0); 𝑑𝑦
= (0,0); |𝐺𝐻 | = √(1)2 + (0)2 = 1
𝑒) 𝑒 = 𝐼𝐽 = (1 − 1,−1 + 2) = (0, 1)
𝑒𝑥 = (0,0); 𝑒𝑦 = (0,1); |𝐼𝐽 | = √(0)2 + (1)2 = 1
𝑓) 𝑓 = 𝐾𝐿 = (−3 + 2, 0 + 2) = (−1,2)
𝑓𝑥 = (−1,0); 𝑓𝑦 = (0,2); |𝐾𝐿 | = √(−1)2 + (2)2 = √5
𝑔) 𝑔 = 𝑀𝑁 = (−1 − 0, 1 − 0) = (−1,1)
𝑔𝑥 = (−1,0); 𝑔𝑦 = (0,1); |𝑀𝑁 | = √(−1)2 + (1)2 = √2
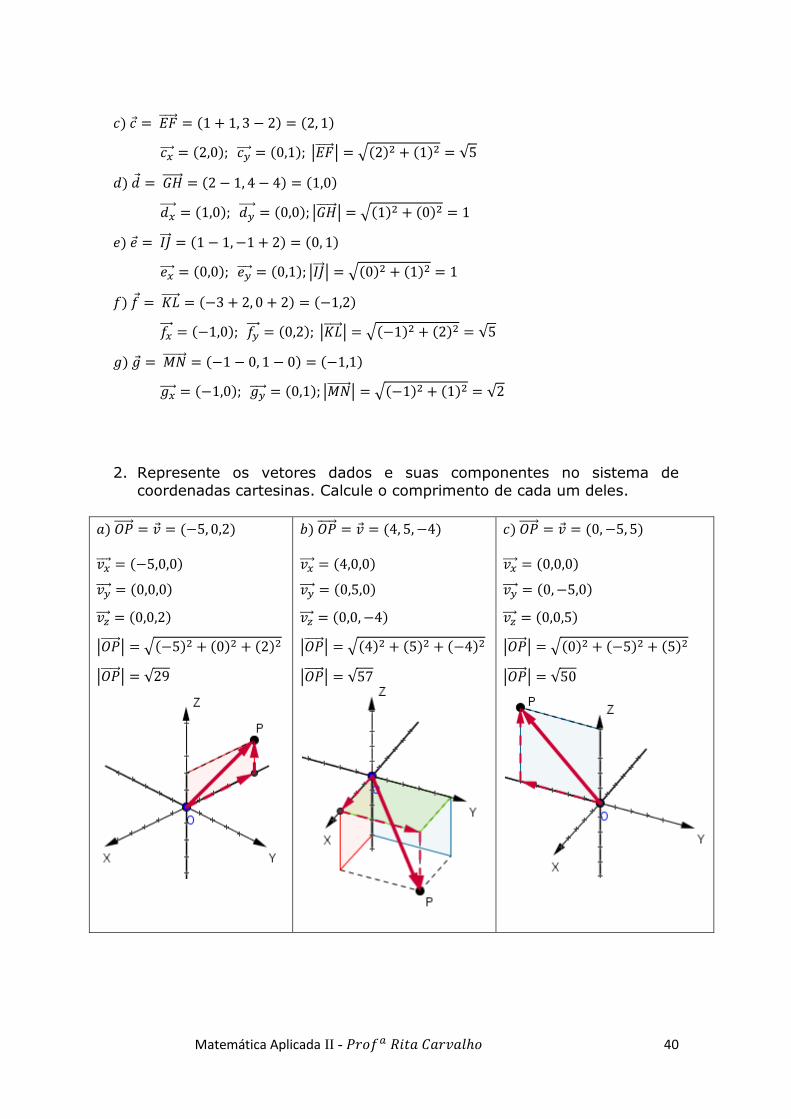
2. Represente os vetores dados e suas componentes no sistema de
coordenadas cartesinas. Calcule o comprimento de cada um deles.
𝑎) 𝑂𝑃 = 𝑣 = (−5, 0,2) 𝑣𝑥 = (−5,0,0)
𝑣𝑦 = (0,0,0)
𝑣𝑧 = (0,0,2)
|𝑂𝑃 | = √(−5)2 + (0)2 + (2)2
|𝑂𝑃 | = √29
𝑏) 𝑂𝑃 = 𝑣 = (4, 5, −4) 𝑣𝑥 = (4,0,0)
𝑣𝑦 = (0,5,0)
𝑣𝑧 = (0,0, −4)
|𝑂𝑃 | = √(4)2 + (5)2 + (−4)2
|𝑂𝑃 | = √57
𝑐) 𝑂𝑃 = 𝑣 = (0,−5, 5) 𝑣𝑥 = (0,0,0)
𝑣𝑦 = (0,−5,0)
𝑣𝑧 = (0,0,5)
|𝑂𝑃 | = √(0)2 + (−5)2 + (5)2
|𝑂𝑃 | = √50
Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 41
y
xa
a =(-3,-4)
-3
-4
b(-1,2,7)z
x
y
+7
-1
+2
y
x
1
-1
v =(1,-1)
z
x
y
3
V =(3, 0, -2)
-2
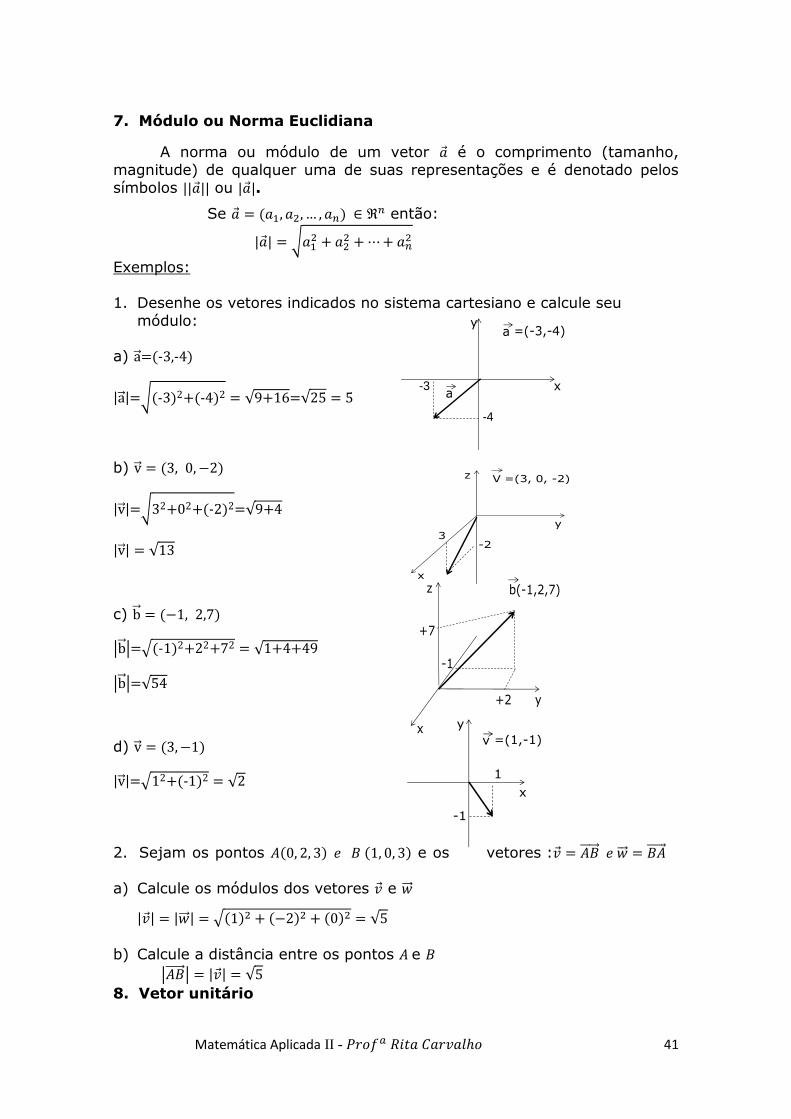
7. Módulo ou Norma Euclidiana
A norma ou módulo de um vetor 𝑎 é o comprimento (tamanho,
magnitude) de qualquer uma de suas representações e é denotado pelos
símbolos ||𝑎 || ou |𝑎 |.
Se 𝑎 = (𝑎1, 𝑎2, … , 𝑎𝑛) ∈ ℜ𝑛 então:
|𝑎 | = √𝑎12 + 𝑎2
2 + ⋯+ 𝑎𝑛2
Exemplos:
1. Desenhe os vetores indicados no sistema cartesiano e calcule seu
módulo: a) a =(-3,-4)
|a |=√(-3)2+(-4)2 = √9+16=√25 = 5
b) v = (3, 0, −2)
|v |=√32+02+(-2)2=√9+4
|v | = √13
c) b = (−1, 2,7)
|b |=√(-1)2+22+72 = √1+4+49
|b |=√54
d) v = (3,−1)
|v |=√12+(-1)2 = √2
vetores :𝑣 = 𝐴𝐵 𝑒 �� = 𝐵𝐴 2. Sejam os pontos 𝐴(0, 2, 3) 𝑒 𝐵 (1, 0, 3) e os
a) Calcule os módulos dos vetores 𝑣 e ��
|𝑣 | = |�� | = √(1)2 + (−2)2 + (0)2 = √5
b) Calcule a distância entre os pontos 𝐴 e 𝐵
|𝐴𝐵 | = |𝑣 | = √5
8. Vetor unitário

Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 42
a
ua
S
Um vetor unitário �� é um vetor cujo módulo é igual a 1, ou seja, |�� | = 1.
Vetor Unitário na direção de um vetor qualquer:
Se 𝑎 é um vetor qualquer, sendo |𝑎 | ≠ 1 e 𝑎 ≠ 0 , então o vetor unitário
na direção de 𝑎 é dado por:
Exemplos:
1) Calcule o vetor unitário na direção do vetor indicado
𝑎) 𝑣 = (−3, 3,1) → |𝑣 | = √(−3)2 + (3)2 + (1)2 = √19
𝑢𝑣 = (−3
√19 ,
3
√19 ,
1
√19 )
𝑏) 𝑣 = (4, 0, 3) → |𝑣 | = √(4)2 + (0)2 + (3)2 = √25 = 5
𝑢𝑣 = (4
5, 0,
3
5)
𝑐) 𝑣 = (−√2 , √2 ) → |𝑣 | = √(√2)2+ (−√2)
2= √4 = 2
𝑢𝑣 = (−√2
2,√2
2 )
2) Encontre um vetor �� que tenha a mesma direção do vetor (−2,4,2) porém de comprimento 6.
|𝑎 | = √(−2)2 + 42 + 22 = √24 = √4.6 = 2√6
Um vetor unitário na direção (−2,4,2) é
𝑢𝑎 = (−2
2√6,
4
2√6,
2
2√6) = (−
1
√6,2
√6,
1
1√6)
�� = 6 𝑢𝑎 = (−6
√6,12
√6,6
√6) = (−√6, 2√6, √6)
9. Representação de Vetores na Base Canônica
|a |= s
a = s . ua
ua =a
s → ua =
a
|a |
ua =a
|a |=
(a1,a2,…,an)
|a |= (
a1
|a |,a2
|a |,…,
an
|a |)
Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 43
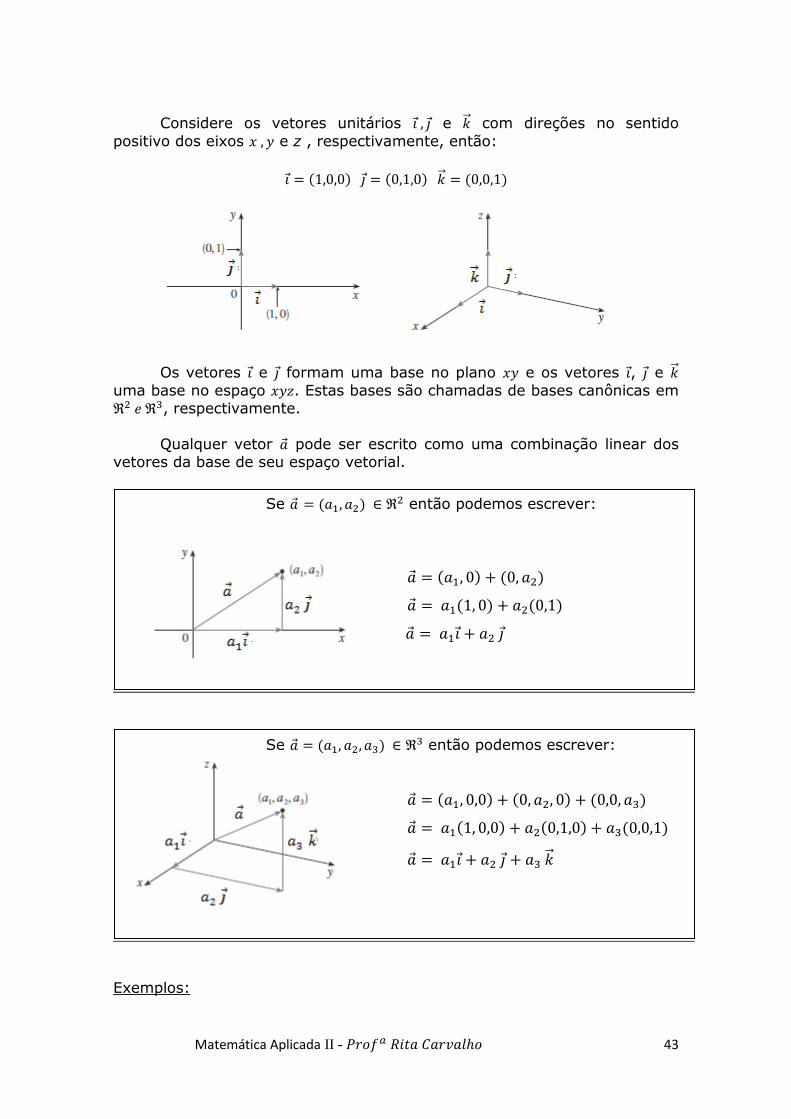
Considere os vetores unitários 𝑖 , 𝑗 e �� com direções no sentido
positivo dos eixos 𝑥 , 𝑦 e z , respectivamente, então:
𝑖 = (1,0,0) 𝑗 = (0,1,0) �� = (0,0,1)
Os vetores 𝑖 e 𝑗 formam uma base no plano 𝑥𝑦 e os vetores 𝑖 , 𝑗 e �� uma base no espaço 𝑥𝑦𝑧. Estas bases são chamadas de bases canônicas em
ℜ2 𝑒 ℜ3, respectivamente.
Qualquer vetor 𝑎 pode ser escrito como uma combinação linear dos
vetores da base de seu espaço vetorial.
Exemplos:
Se 𝑎 = (𝑎1, 𝑎2, 𝑎3) ∈ ℜ3 então podemos escrever:
𝑎 = (𝑎1, 0,0) + (0, 𝑎2, 0) + (0,0, 𝑎3)
𝑎 = 𝑎1(1, 0,0) + 𝑎2(0,1,0) + 𝑎3(0,0,1)
𝑎 = 𝑎1𝑖 + 𝑎2 𝑗 + 𝑎3 ��
Se 𝑎 = (𝑎1, 𝑎2) ∈ ℜ2 então podemos escrever:
𝑎 = (𝑎1, 0) + (0, 𝑎2)
𝑎 = 𝑎1(1, 0) + 𝑎2(0,1)
𝑎 = 𝑎1𝑖 + 𝑎2 𝑗

Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 44
1. Represente os vetores 𝑎 = (1, 2, −3), �� = (4,0,7) e 𝑣 = 2 𝑎 + 3�� na base canônica
𝑎 = 𝑖 + 2 𝑗 − 3�� e �� = 4 𝑖 + 7 ��
𝑣 = 2 𝑎 + 3�� = 2( 𝑖 + 2 𝑗 − 3�� ) + 3(4 𝑖 + 7 �� )
𝑣 = 2𝑖 + 4 𝑗 − 6 �� + 12 𝑖 + 21 �� = (2 + 12)𝑖 + (4 + 0)𝑗 + (−6 + 21) ��
𝑣 = 14𝑖 + 4 𝑗 + 15 ��
2. Calcule o módulo e as componentes do vetor 𝐹 que tem origem no ponto
𝐴(1, 4, 0) e extremidade no ponto 𝐵(4, 0, 4):
𝐹 = 𝐴𝐵 = 𝑂𝐵 − 𝑂𝐴 = (4 − 1) �� + (0 − 4) �� + (4 − 0) 𝑘 = 3 𝑖 − 4 𝑗 + 4 ��
𝐹 = (𝐹𝑥 , 𝐹𝑦, 𝐹𝑧) = ( 3,−4, 4)
𝐹𝑥 = 3 𝐹𝑦 = −4 𝐹𝑧 = 4
|𝐹 | = √(3)2 + (−4)2 + (4)2 = √41
3. Dados os pontos 𝐴(−1, 3) e 𝐵 (3, 1) calcule a distância entre A e B (𝑑𝐴𝐵) e
determine o vetor unitário na direção de 𝑣 = 𝐵𝐴
𝑣 = 𝐵𝐴 = 𝑂𝐴 − 𝑂𝐵 = (−1 − 3) �� + (3 − 1) �� = −4 𝑖 + 2 𝑗
|𝑣 | = √(−4)2 + (2)2 = √20
𝑑𝐴𝐵 = |𝑣 | = √20
𝑢𝑣 = −4
√20 𝑖 +
2
√20 𝑗
10. Ângulo entre dois Vetores, Ângulos Diretores e Cossenos Diretores
Ângulo entre dois vetores
O ângulo 𝜃 entre dois vetores não nulos 𝑎 = 𝑂𝐴 e �� = 𝑂𝐵 é o menor
ângulo formado pelos segmentos de reta 𝑂𝐴 e 𝑂𝐵 .
0 ≤ 𝜃 ≤ 𝜋
Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 45
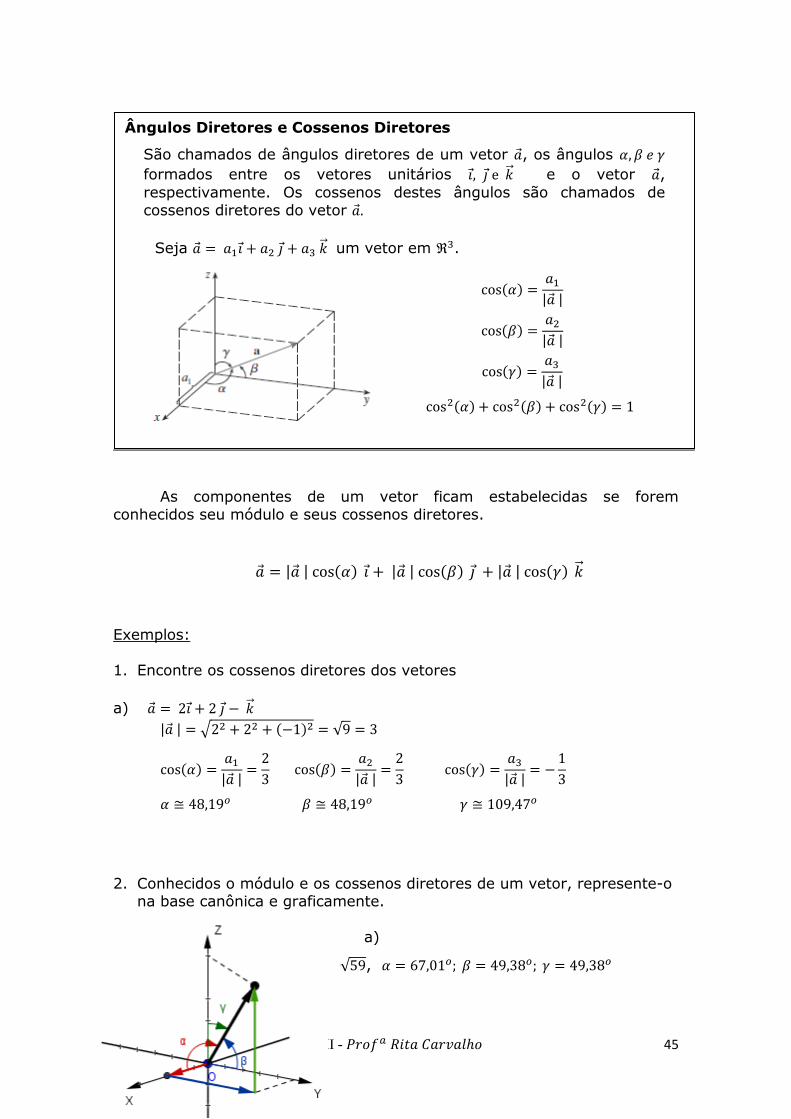
As componentes de um vetor ficam estabelecidas se forem
conhecidos seu módulo e seus cossenos diretores.
𝑎 = |𝑎 | cos(𝛼) 𝑖 + |𝑎 | cos(𝛽) 𝑗 + |𝑎 | cos(𝛾) ��
Exemplos:
1. Encontre os cossenos diretores dos vetores
a) 𝑎 = 2𝑖 + 2 𝑗 − ��
|𝑎 | = √22 + 22 + (−1)2 = √9 = 3
cos(𝛼) =𝑎1
|𝑎 |=
2
3 cos(𝛽) =
𝑎2
|𝑎 |=
2
3 cos(𝛾) =
𝑎3
|𝑎 |= −
1
3
𝛼 ≅ 48,19𝑜 𝛽 ≅ 48,19𝑜 𝛾 ≅ 109,47𝑜
2. Conhecidos o módulo e os cossenos diretores de um vetor, represente-o na base canônica e graficamente.
a) |𝑎 | =
√59, 𝛼 = 67,01𝑜; 𝛽 = 49,38𝑜; 𝛾 = 49,38𝑜
Ângulos Diretores e Cossenos Diretores
São chamados de ângulos diretores de um vetor 𝑎 , os ângulos 𝛼, 𝛽 𝑒 𝛾
formados entre os vetores unitários 𝑖 , 𝑗 e �� e o vetor 𝑎 , respectivamente. Os cossenos destes ângulos são chamados de
cossenos diretores do vetor 𝑎 .
Seja 𝑎 = 𝑎1𝑖 + 𝑎2 𝑗 + 𝑎3 �� um vetor em ℜ3.
cos(𝛼) =𝑎1
|𝑎 |
cos(𝛽) =𝑎2
|𝑎 |
cos(𝛾) =𝑎3
|𝑎 |
cos2(𝛼) + cos2(𝛽) + cos2(𝛾) = 1

Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 46
𝑎1 = |𝑎 | cos(𝛼) = √59 cos(67,01𝑜) ≅ 3
𝑎2 = |𝑎 | cos(𝛽) = √59 cos(49,38𝑜) ≅ 5
𝑎3 = |𝑎 | cos(𝛾) = √59 cos(49,38𝑜) ≅ 5
𝑎 = (3,5,5) → 𝑎 = 3𝑖 + 5 𝑗 + 5��
b) |𝑣 | = √50, 𝛼 = 115,104𝑜; 𝛽 = 55,55𝑜; 𝛾 = 135𝑜
𝑣1 = |𝑣 | cos(𝛼) = √50 cos(115,104𝑜) ≅ −3
𝑣2 = |𝑣 | cos(𝛽) = √50 cos(55,55𝑜) ≅ 4
𝑣3 = |𝑣 | cos(𝛾) = √50 cos(135𝑜) ≅ −5
𝑣 = (−3, 4, −5) → 𝑣 = −3𝑖 + 4 𝑗 − 5��
3. Duas forças 𝐹1 e 𝐹2 de magnitude 12 kN e 10 kN, respectivamente,
atuam num determinado ponto 𝑃 de uma estrutura, conforme indicado
na figura abaixo.
a) Calcule a força resultante 𝐹𝑅 que atua no ponto 𝑃, sabendo que a
força resultante é o somatório de todas as forças atuantes.
𝐹𝑅 = 𝐹1
+ 𝐹2
y
x
𝐹2 𝐹1
300 450

Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 47
Força 𝐹1 : |𝐹1
| = 12; 𝛼 = 300 ; 𝛽 = 600
𝐹1 = (𝐹1𝑥, 𝐹1𝑦) = 𝐹1𝑥 𝑖 + 𝐹1𝑦 𝑗
𝐹1𝑥 = |𝐹1 | cos(𝛼) = 12 cos(300) = 12
√3
2= 6 √3
𝐹1𝑦 = |𝐹1 | cos(𝛽) = 12 cos(600) = 12
1
2= 6
𝐹1 = (6 √3, 6) = 6 √3 𝑖 + 6 𝑗
Força 𝐹2 : |𝐹2
| = 10; 𝛼 = 1800 − 450 = 1350; 𝛽 = 450
𝐹2 = (𝐹2𝑥, 𝐹2𝑦) = 𝐹2𝑥 𝑖 + 𝐹2𝑦 𝑗
𝐹2𝑥 = |𝐹2 | cos(𝛼) = 10 cos(1350) = −10
√2
2= −5√2
𝐹2𝑦 = |𝐹2 | cos(𝛽) = 10 cos(450) = 10
√2
2= 5√2
𝐹2 = (−5√2, 5√2) = −5√2 𝑖 + 5√2 𝑗
Força resultante: 𝐹𝑅 = 𝐹1
+ 𝐹2
𝐹𝑅 = (6 √3 𝑖 + 6 𝑗 ) + (−5√2 𝑖 + 5√2 𝑗 )
𝐹𝑅 = (6 √3 − 5√2) 𝑖 + (6 + 5√2) 𝑗 ≅ 3,32 𝑖 + 13,07 𝑗
b) Determine a magnitude (módulo) e a direção da força resultante 𝐹𝑅.
Represente graficamente.
𝐹𝑅 = (6 √3 − 5√2) 𝑖 + (6 + 5√2) 𝑗 ≅ 3,32 𝑖 + 13,07 𝑗
|𝐹𝑅 | = √(6 √3 − 5√2)
2+ (6 + 5√2)
2 ≅ 13,48 𝑘𝑁
cos(𝛼) =𝐹𝑅𝑥
|𝐹𝑅 |
=6 √3 − 5√2
13,48≅ 0,24629
𝛼 = cos−1(0,24629) ≅ 75,740
y
x
|𝐹𝑅 | = 13,48 𝑘𝑁
75,740
|𝐹𝑅𝑦 | = 13,07 𝑘𝑁
|𝐹𝑅𝑥 | = 3,32 𝑘𝑁
Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 48
c) Qual a força de reação �� que deve atuar na estrutura para que o
ponto 𝑃 esteja em equilíbrio?
Para que um ponto esteja em equilíbrio o somatório das forças neste ponto deve ser nulo.
𝐹1 + 𝐹2
+ �� = 0 → 𝐹𝑅 + �� = 0 → �� = −𝐹𝑅
�� = −𝐹𝑅 ≅ − 3,32 𝑖 − 13,07 𝑗
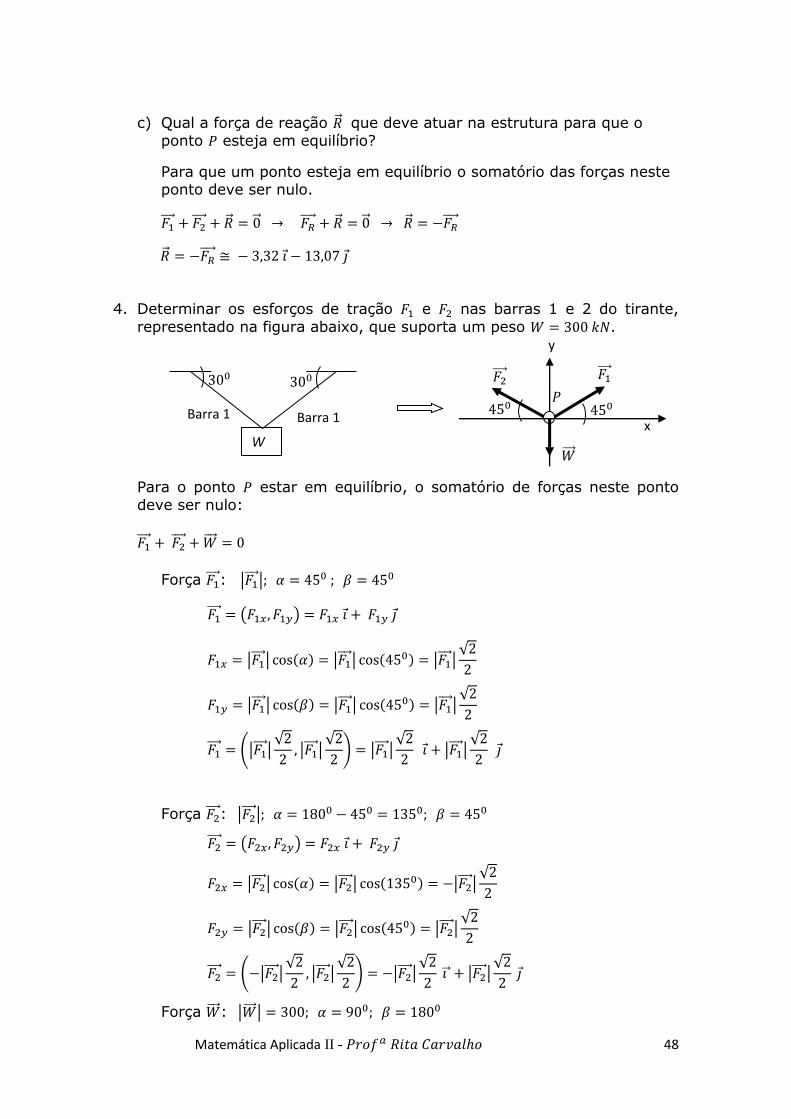
4. Determinar os esforços de tração 𝐹1 e 𝐹2 nas barras 1 e 2 do tirante,
representado na figura abaixo, que suporta um peso 𝑊 = 300 𝑘𝑁.
Para o ponto 𝑃 estar em equilíbrio, o somatório de forças neste ponto
deve ser nulo:
𝐹1 + 𝐹2
+ �� = 0
Força 𝐹1 : |𝐹1
|; 𝛼 = 450 ; 𝛽 = 450
𝐹1 = (𝐹1𝑥, 𝐹1𝑦) = 𝐹1𝑥 𝑖 + 𝐹1𝑦 𝑗
𝐹1𝑥 = |𝐹1 | cos(𝛼) = |𝐹1
| cos(450) = |𝐹1 |
√2
2
𝐹1𝑦 = |𝐹1 | cos(𝛽) = |𝐹1
| cos(450) = |𝐹1 |
√2
2
𝐹1 = (|𝐹1
|√2
2, |𝐹1 |
√2
2) = |𝐹1
|√2
2 𝑖 + |𝐹1
|√2
2 𝑗
Força 𝐹2 : |𝐹2
|; 𝛼 = 1800 − 450 = 1350; 𝛽 = 450
𝐹2 = (𝐹2𝑥, 𝐹2𝑦) = 𝐹2𝑥 𝑖 + 𝐹2𝑦 𝑗
𝐹2𝑥 = |𝐹2 | cos(𝛼) = |𝐹2
| cos(1350) = −|𝐹2 |
√2
2
𝐹2𝑦 = |𝐹2 | cos(𝛽) = |𝐹2
| cos(450) = |𝐹2 |
√2
2
𝐹2 = (−|𝐹2
|√2
2, |𝐹2 |
√2
2) = −|𝐹2
|√2
2 𝑖 + |𝐹2
|√2
2 𝑗
Força �� : |�� | = 300; 𝛼 = 900; 𝛽 = 1800
y
𝐹2 𝐹1
300 300 𝑃
450 450 Barra 1 Barra 1 x
�� W

Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 49
�� = (𝑊𝑥 ,𝑊𝑦) = 𝑊𝑥 𝑖 + 𝑊𝑦 𝑗
𝑊𝑥 = |�� | cos(𝛼) = |�� | cos(900) = 0
𝑊𝑦 = |�� | cos(𝛽) = |�� | cos(1800) = −300
�� = (0,−300) = −300 𝑗
𝐸𝑞𝑢𝑖𝑙í𝑏𝑟𝑖𝑜 𝑑𝑎𝑠 𝑓𝑜𝑟ç𝑎𝑠 𝑛𝑜 𝑝𝑜𝑛𝑡𝑜 𝑃: 𝐹1 + 𝐹2
+ �� = 0
(|𝐹1 |
√2
2 𝑖 + |𝐹1
|√2
2 𝑗 ) + (−|𝐹2
|√2
2 𝑖 + |𝐹2
|√2
2 𝑗 ) + (−300 𝑗 ) = 0 𝑖 + 0 𝑗
Normalmente em problema de engenharia o equilíbrio das forças é feito separadamente por direção, ou seja:
∑𝐹𝑥 = 0 𝑒 ∑𝐹𝑦 = 0
∑𝐹𝑥 = 0 → Somatório das forças em 𝑥 deve ser nulo
𝐹1𝑥 + 𝐹2𝑥 = 0
|𝐹1 |
√2
2 − |𝐹2
|√2
2 = 0 → |𝐹1
| = |𝐹2 |
∑𝐹𝑦 = 0 → Somatório das forças em y deve ser nulo
𝐹1𝑦 + 𝐹2𝑦 + 𝑊𝑦 = 0
|𝐹1 |
√2
2 + |𝐹2
|√2
2 − 300 = 0
|𝐹1 |
√2
2 + |𝐹1
|√2
2= 300
|𝐹1 | = 150 √2 𝑘𝑁 ≅ 212,13 𝑘𝑁
|𝐹2 | = 150 √2 𝑘𝑁 ≅ 212,13 𝑘𝑁

Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 50
11. Produto Interno ou Produto Escalar
Sejam 𝑎 = (𝑎1, 𝑎2, … , 𝑎𝑛) e �� = (𝑏1, 𝑏2, … , 𝑏𝑛) dois vetores em ℜ𝑛. O
produto escalar dos vetores 𝑎 e �� o número real 𝑎 . �� dado por:
𝑎 . �� = 𝑎1𝑏1 + 𝑎2𝑏2 + ⋯+ 𝑎𝑛𝑏𝑛
𝑆𝑒 0 ≤ θ <𝜋
2 𝑒𝑛𝑡ã𝑜 cos(𝜃) > 0 𝑙𝑜𝑔𝑜 𝑎 . �� > 0
𝑆𝑒 𝜋
2< 𝜃 < 𝜋 𝑒𝑛𝑡ã𝑜 cos(𝜃) < 0 𝑙𝑜𝑔𝑜 𝑎 . �� < 0
𝑆𝑒 θ =𝜋
2 𝑒𝑛𝑡ã𝑜 cos(𝜃) = 0 𝑙𝑜𝑔𝑜 𝑎 . �� = 0 (𝑣𝑒𝑡𝑜𝑟𝑒𝑠 𝑝𝑒𝑟𝑝𝑒𝑛𝑑𝑖𝑐𝑢𝑙𝑎𝑟𝑒𝑠)
𝑆𝑒 θ = 0 𝑒𝑛𝑡ã𝑜 cos(𝜃) = 1 𝑙𝑜𝑔𝑜 𝑎 . �� = |𝑎 ||�� | (𝑣𝑒𝑡𝑜𝑟𝑒𝑠 𝑛𝑎 𝑚𝑒𝑠𝑚𝑎 𝑑𝑖𝑟𝑒çã𝑜)
𝑆𝑒 θ = 𝜋 𝑒𝑛𝑡ã𝑜 cos(𝜃) = −1 𝑙𝑜𝑔𝑜 𝑎 . �� = |𝑎 ||�� | (𝑣𝑒𝑡𝑜𝑟𝑒𝑠 𝑒𝑚 𝑑𝑖𝑟𝑒çã𝑜 𝑜𝑝𝑜𝑠𝑡𝑎)
Interpretação Geométrica
Seja 𝜃 é o ângulo formado entre dois vetores 𝑎 e �� ,
𝑎 . �� = |𝑎 | |�� | cos (𝜃)
cos(𝜃) =𝑎 . ��
|𝑎 | |�� | → θ = 𝑎𝑟𝑐 𝑐𝑜𝑠 (
𝑎 . ��
|𝑎 | |�� |)
Propriedades do Produto interno
Sejam 𝑎 𝑒 �� dois vetores e 𝑐 um escalar, então:
1) 𝑎 . 𝑎 = |𝑎 |2 2) 𝑎 . �� = �� . 𝑎
3) 0 . 𝑎 = 0 4) 𝑎 . (�� + 𝑐 ) = 𝑎 . �� + 𝑎 . 𝑐
5) (𝑐 𝑎 ). �� = 𝑐 (𝑎 . �� ) = 𝑎 . (𝑐 𝑏 )
Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 51
Exemplos:
1) Calcule o produto interno dos vetores indicados:
𝑎) 𝑎 = 2𝑖 + 4 𝑗 e �� = 3𝑖 − 𝑗
𝑎 . �� = (2.3) + (4. (−1)) = 6 − 4 = 2
𝑏) 𝑎 = −𝑖 + 7 𝑗 + 4 �� e �� = 6𝑖 + 2 𝑗 −1
2 ��
𝑎 . �� = (−1 . 6) + (7 . 2) + (= 4.1
2) = −6 + 14 − 2 = 6
𝑐) 𝑎 = (0, 1) e �� = (−1,−1)
𝑎 . �� = (0. (−1)) + (1 . (−1)) = 0 − 1 = −1
2) Calcule o produto interno dos vetores indicados:
𝑎) |𝑎 | = 12 , |�� | = 15 e o ângulo formado entre eles é 𝜋/6
𝑎 . �� = |𝑎 | |�� | cos(𝜃) = (12)(15) cos (𝜋
6) = 90 √3 ≈ 155,9
𝑏) |𝑎 | = 4 , |�� | = 10 e o ângulo formado entre eles é 120𝑜
𝑎 . �� = |𝑎 | |�� | cos(𝜃) = (4)(10) cos(120𝑜) = 40(−0,5) = −20
𝑐) |𝑎 | = 4 , |�� | = 6 e o ângulo formado entre eles é 𝜋/3
𝑎 . �� = |𝑎 | |�� | cos(𝜃) = (4)(6) cos(𝜋/3) = 24(0,5) = 12
3) Encontre o ângulo formado entre os vetores
a) 𝑣 = (3, 4), �� = (5, 12)
|𝑣 | = √32 + 42 = 5 , |�� | = √52 + 122 = 13
𝑣 . 𝑢 = (3). (5) + (4). (12) = 63
cos(𝜃) =𝑣 . ��
|�� | |𝑣 |=
63
5 .13=
63
65 → θ = cos−1 (
63
65) ≈ 14°
b) 𝑣 = 𝑗 + �� , �� = 𝑖 + 2 𝑗 − 3��
|𝑣 | = √02 + 12 + 12 = √2, |�� | = √12 + 22 + (−3)2 = √14
𝑣 . 𝑢 = (0). 1 + (1). (2) + (1). (−3) = −1
cos(𝜃) =𝑣 . ��
|�� | |𝑣 |=
−1
√2. √14=
−1
√28 → θ = cos−1 (
−1
√28) ≈ 101°

Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 52
4) Determine se os vetores indicados são paralelos, perpendiculares ou nenhuma das duas opções
a) 𝑎 = 2𝑖 + 2 𝑗 − �� e �� = 5𝑖 − 4 𝑗 + 2 ��
𝑎 . �� = (2 . 5) + (2 . (−4) ) + (−1 . 2) = 10 − 8 − 2 = 0
Se 𝑎 . �� = 0, o coseno do ângulo formado entre eles é 0, logo o ângulo é 90º, portanto os vetores são perpendiculares.
b) 𝑎 = (−2, 4) e �� = (1,−2)
𝑎 . �� = (−2)(1) + (4)(−2) = −2 − 8 = −10
|𝑎 | = √20 |�� | = √5 → cos(𝜃) =−10
√5.20= −1
São paralelos (vetor 𝑎 é múltiplo escalar de �� )
c) 𝑎 = (−5, 3, 7) e �� = (6,−8, 2)
𝑎 . �� = (−5)(6) + 3(−8) + (7)(2) = −30 − 24 + 14 = −40
|𝑎 | = √83 |�� | = √104 → cos(𝜃) =−40
√83 . 104= −0.43
Não são ortogonais, nem paralelos.
12. Produto Interno : Problemas Aplicados
O trabalho 𝑊 realizado por uma força 𝐹 para produzir em uma partícula um
deslocamento �� é dado por:
𝑊 = 𝐹 . ��
Exemplos:
1. Uma força, representada pelo vetor 𝐹 = 10 𝑖 + 18 𝑗 − 6 �� , move um objeto
ao longo de uma linha reta do ponto A=(2,3,0) ao ponto B=(4,9,15). Encontre o trabalho realizado por esta força para produzir este
deslocamento, sendo o deslocamento medido em metros(m) e a força em Newton (N).
𝑊 = 𝐹 . �� → 𝐹 = 10 𝑖 + 18 𝑗 − 6 �� 𝐸 �� = 𝐴𝐵
�� = 𝐴𝐵 = 𝑂𝐵 − 𝑂𝐴 = (4 − 2)𝑖 + (9 − 3)𝑗 + (15 − 0)�� = 2 𝑖 + 6 𝑗 + 15 ��
𝑊 = 𝐹 . �� = (10 𝑖 + 18 𝑗 − 6 �� ) . ( 2 𝑖 + 6 𝑗 + 15 �� )
𝑊 = (10. 2) + (18 . 6) + (−6 .15) = 20 + 108 − 90 = 38 𝑁.𝑚 = 38 𝐽 (𝑗𝑜𝑢𝑙𝑒𝑠)

Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 53
2. Calcule o trabalho realizado pela força da gravidade para que um bloco de 1,5 kg escorregue 6 metros sobre um plano inclinado de 30º em
relação à horizontal.
�� = 𝑚 𝑔 (𝑝𝑒𝑠𝑜 = 𝑚𝑎𝑠𝑠𝑎. 𝑎𝑐𝑒𝑙𝑒𝑟𝑎çã𝑜 𝑑𝑎 𝑔𝑟𝑎𝑣𝑖𝑑𝑎𝑑𝑒)
�� = 1,5 . 10 (𝑘𝑔 .𝑚
𝑠2) = 15 𝑁 (𝑁𝑒𝑤𝑡𝑜𝑛) →
|�� | = 15 𝑁 𝑒 |�� | = 6 𝑚
𝜃 = 60𝑜
𝑊 = �� . �� = |�� || �� | cos(𝜃) = 15 .6 . cos(60𝑜) = 90 . 0,5 = 45 𝐽
13. Produto Vetorial
Sejam 𝑎 = 𝑎1𝑖 + 𝑎2 𝑗 + 𝑎3 �� e �� = 𝑏1𝑖 + 𝑏2 𝑗 + 𝑏3 �� dois vetores em ℜ3.
Chama-se produto vetorial dos vetores 𝑎 e �� tomados nesta ordem e
representado por 𝑎 × �� ao vetor dado por:
𝑎 × �� = (𝑎2𝑏3 − 𝑎3𝑏2) 𝑖 + (𝑎3𝑏1 − 𝑎1𝑏3) 𝑗 + (𝑎1𝑏2 − 𝑎2𝑏1) ��
Para facilidade de memorização denotaremos a definição anterior da
forma:
6 m
30o
P = 15 N
��
60o

Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 54
Exemplos
1) Encontre o vetor 𝑣 obtido pelo produto vetorial dos vetores 𝑎 𝑒 �� indicados:
a) 𝑎 = (1, 3, 4) 𝑒 �� = (2, 7, −5)
𝑣 = 𝑎 × �� = [𝑖 𝑗 ��
1 3 42 7 −5
]
𝑣 = −15 𝑖 + 8 �� + 7 �� − (6 �� + 28 𝑖 − 5 𝑗 ) = −43 𝑖 + 13 �� + ��
b) 𝑎 = (1, 2, 0) 𝑒 �� = (0, 3, 1)
𝑣 = 𝑎 × �� = [𝑖 𝑗 ��
1 2 00 3 1
]
𝑣 = 2 𝑖 + 0 �� + 3 �� − (0 �� + 0 𝑖 + 1 𝑗 ) = 2 𝑖 − �� + 3 ��
Interpretação Geométrica
Se 𝜃 é o ângulo formado entre dois vetores 𝑎 e �� , 𝑠𝑒𝑛𝑑𝑜 0 ≤ 𝜃 ≤ 𝜋, então
|𝑎 × �� | = |𝑎 | |�� | sen (𝜃)
|𝑎 × �� | é a área do paralelogramo
determinado pelos vetores 𝑎 e ��
Vetor Resultante 𝑎 × ��
O vetor resultante 𝑎 × �� é um vetor
ortogonal a ambos os vetores 𝑎 e �� , portanto é perpendicular ao plano que
passa por 𝑎 e �� , ou seja,
(𝑎 × �� ) . �� = 0
Sua direção pode ser determinada pela regra da mão direita, isto é, se os dedos da
mão direita forem dobrados na mesma direção da rotação (através do ângulo
menor que 180o) de 𝑎 até �� , então o polegar
estendido apontará a direção de 𝑎 × ��

Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 55
c) 𝑎 = 2 𝑖 + �� − �� 𝑒 �� = �� + 2 ��
𝑣 = 𝑎 × �� = [𝑖 𝑗 ��
2 1 −10 1 2
]
𝑣 = 2 𝑖 + 0 �� + 2 �� − (0 �� − 1 𝑖 + 4 𝑗 ) = 3 𝑖 − 4 �� + 2 ��
d) 𝑎 = 𝑖 − 2 �� 𝑒 �� = �� + ��
𝑣 = 𝑎 × �� = [𝑖 𝑗 ��
1 0 −20 1 1
]
𝑣 = 0 𝑖 + 0 �� + �� − (0 �� − 2 𝑖 + 𝑗 ) = 2 𝑖 − �� + ��
2) Encontre dois vetores perpendiculares ao plano que passa pelos pontos
𝑃(1, 4, 6), 𝑄(−2, 5, −1) e 𝑅(1,−1, 1)
O vetor 𝑃𝑄 × 𝑃𝑅 é perpendicular aos vetores 𝑃𝑄 e 𝑃𝑅 e, portanto
perpendicular ao plano que contém os pontos 𝑃, 𝑄 e 𝑅.
𝑃𝑄 = (−2 − 1) 𝑖 + (5 − 4) 𝑗 + (−1 − 6) �� = −3 𝑖 + 𝑗 − 7 ��
𝑃𝑅 = (1 − 1) 𝑖 + (−1 − 4) 𝑗 + (1 − 6) �� = −5 𝑗 − 5 ��
𝑣1 = 𝑃𝑄 × 𝑃𝑅 = [𝑖 𝑗 ��
−3 1 −70 −5 −5
]
𝑣1 = 𝑃𝑄 × 𝑃𝑅 = −5𝑖 + 0 𝑗 + 15 �� − (35 𝑖 + 15 𝑗 + 0 �� ) = −40 𝑖 − 15 𝑗 + 15 ��
𝑣2 = 𝑃𝑅 × 𝑃𝑄 = − 𝑣1 = 40 𝑖 + 15 𝑗 − 15 ��
3) Encontre dois vetores unitários perpendiculares aos vetores 𝑎 e �� dados:
a) 𝑎 = (1 , −1, 1) e �� = (0, 4 , 4)
Sabe-se que o vetor 𝑎 × �� é um vetor perpendicular a ambos os vetores
𝑎 e �� , assim
𝑣 = 𝑎 × �� = [𝑖 𝑗 ��
1 −1 10 4 4
] = −4𝑖 + 0 𝑗 + 4 �� − (4 𝑖 + 4 𝑗 + 0 �� )
𝑣 = −8 𝑖 − 4 𝑗 + 4 ��
Um vetor unitário na direção de 𝑣 é:
𝑢1 =(−8 ,−4 , 4)
√64 + 16 + 16=
(−8 ,−4 , 4)
√96=
(−8 , −4 , 4)
4 √6= (−
2
√6,−
1
√6,1
√6)
O outro vetor unitário tem direção oposta
𝑢2 = −𝑢1 = (2
√6,
1
√6,−
1
√6)

Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 56
b) 𝑎 = 𝑖 + 𝑗 + �� e �� = 2𝑖 + ��
Sabe-se que o vetor 𝑎 × �� é um vetor perpendicular a ambos os vetores
𝑎 e �� , assim
𝑣 = 𝑎 × �� = [𝑖 𝑗 ��
1 1 12 0 1
] = 1 𝑖 + 2 𝑗 + 0 �� − (0 𝑖 + 1 𝑗 + 2 �� )
𝑣 = 𝑖 + 𝑗 − 2 ��
Um vetor unitário na direção de 𝑣 é:
𝑢1 =(1, 1 , −2)
√1 + 1 + 4=
(1, 1, −2)
√6= (
1
√6,
1
√6, −
2
√6) =
1
√6 𝑖 +
1
√6 𝑗 −
2
√6 ��
O outro vetor unitário tem direção oposta
𝑢2 = −𝑢1 = (−1
√6,−
1
√6,
2
√6) = −
1
√6 𝑖 −
1
√6 𝑗 +
2
√6 ��
4) Encontre a área do paralelogramo de vértices 𝐴(−2, 1), 𝐵(0, 4), 𝐶(4, 2) e
𝐷(2,−1).
Plotando os pontos dados, observa-se que o paralelogramo é determinado
pelos vetores 𝐴𝐵 e 𝐴𝐷 .
Sabe-se que a área do paralelogramo é o módulo do vetor obtido pelo produto vetorial entre eles.
𝐴𝐵 = ( 0 − (−2) ) �� + (4 − 1)𝑗 = 2 �� + 3 𝑗
𝐴𝐷 = ( 2 − (−2) ) �� + (−1 − 1)𝑗 = 4 �� − 2 𝑗
𝑣 = 𝐴𝐵 × 𝐴𝐷 = [𝑖 𝑗 ��
2 3 04 −2 0
] = 0 𝑖 + 0 𝑗 − 4 �� − (0 𝑖 + 0 𝑗 + 12 �� )
𝑣 = −16 ��
Á𝑟𝑒𝑎 = |𝐴𝐵 × 𝐴𝐷 | = | 𝑣 | = √0 + 0 + ( −16)2 = |−16| = 16 u.a (unidade de área)

Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 57
5) Encontre a área do triângulo de vértices 𝑃(1, 0, 0), 𝑄(0, 2, 0), e 𝑅( 0, 0, 3).
Observe que a área do triângulo determinado pelos pontos 𝑃, 𝑄 e 𝑅 é a
metade da área do paralelogramo formado por estes pontos. A área do
paralelogramo determinado pelos vetores 𝑃𝑄 e 𝑃𝑅 é dada por:
Á𝑟𝑒𝑎 𝑝𝑎𝑟𝑎𝑙𝑒𝑙𝑜𝑔𝑟𝑎𝑚𝑜 = |𝑃𝑄 × 𝑃𝑅 |
𝑃𝑄 = ( 0 − 1 ) �� + (2 − 0)𝑗 + (0 − 0)�� = − �� + 2 𝑗
𝑃𝑅 = ( 0 − 1 ) �� + (0 − 0)𝑗 + (3 − 0)�� = − �� + 3 ��
𝑃𝑄 × 𝑃𝑅 = [𝑖 𝑗 ��
−1 2 0−1 0 3
] = 6 𝑖 + 0 𝑗 + 0 �� − (0 𝑖 − 3 𝑗 − 2 �� ) = 6 𝑖 + 3 𝑗 + 2 ��
Á𝑟𝑒𝑎 𝑑𝑜 𝑝𝑎𝑟𝑎𝑙𝑒𝑙𝑜𝑔𝑟𝑎𝑚𝑜 = |𝑃𝑄 × 𝑃𝑅 | = √62 + 32 + 22 = √36 + 9 + 4 = 7 𝑢. 𝑎
Á𝑟𝑒𝑎 𝑑𝑜 𝑡𝑟𝑖â𝑛𝑔𝑢𝑙𝑜 =|𝑃𝑄 × 𝑃𝑅 |
2=
7
2= 3,5 𝑢. 𝑎
14. Produto Vetorial: Problemas Aplicados
Seja 𝐹 uma força atuando num corpo rígido em um determinado
ponto 𝐴 de vetor posição 𝑟 = 𝑂𝐴 , indicado na figura abaixo. Chama-se
torque ou momento da força 𝐹 em relação ao ponto 𝑂 ao produto vetorial
do vetor posição e o vetor força.
A magnitude do torque é dada por:
|�� | = |�� × �� | = |�� | |�� | 𝒔𝒆𝒏(𝜽)
A direção do vetor torque é dada pela regra da mão direita. O vetor
torque é perpendicular ao plano formado pelos vetores 𝑟 e 𝐹 .
�� = �� × �� = 𝑶𝑨 × ��
��
��
𝑶
𝑨
𝜽
��
𝒙
𝒚
𝒛

Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 58
Numa linguagem mais informal, podemos dizer que o torque é a medida de quanto uma força que age em um objeto faz com que o mesmo
gire.
Observe que a única componente da força �� que pode causar torque
(rotação) é a componente perpendicular ao vertor �� .
Na figura abaixo, por exemplo, a magnitude do torque da força 𝐹 , aplicada no ponto 𝐴, em torno do ponto 𝑂 é:
|𝜏 | = |�� × �� | = |𝑟 | |𝐹 | 𝑠𝑒𝑛(𝜃)
onde |�� | = |𝑂𝐴 | e |𝐹𝑦 | = |𝐹 | 𝑠𝑒𝑛(𝜃)
logo
|𝜏 | = |𝑟 | |𝐹𝑦 |
A rotação da força 𝐹𝑦 em torno do ponto 𝑂 é no sentido anti-horário,
portanto, pela regra da mão direita, o vetor torque 𝜏 está no sentido
positivo do eixo 𝑧.
Na engenharia o torque é chamado de momento. Sua magnitude é geralmente calculada com a decomposição da força.
De acordo com o eixo de rotação o momento pode ser um momento torsor ou um momento fletor.
Momento torsor: quando a rotação se dá em torno do eixo da peça
.
z
y
x ��
𝜃
𝜃
�� 𝑭𝒚
𝑭𝒙
𝑶
𝑨
��
��
��
��
𝜽
Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 59
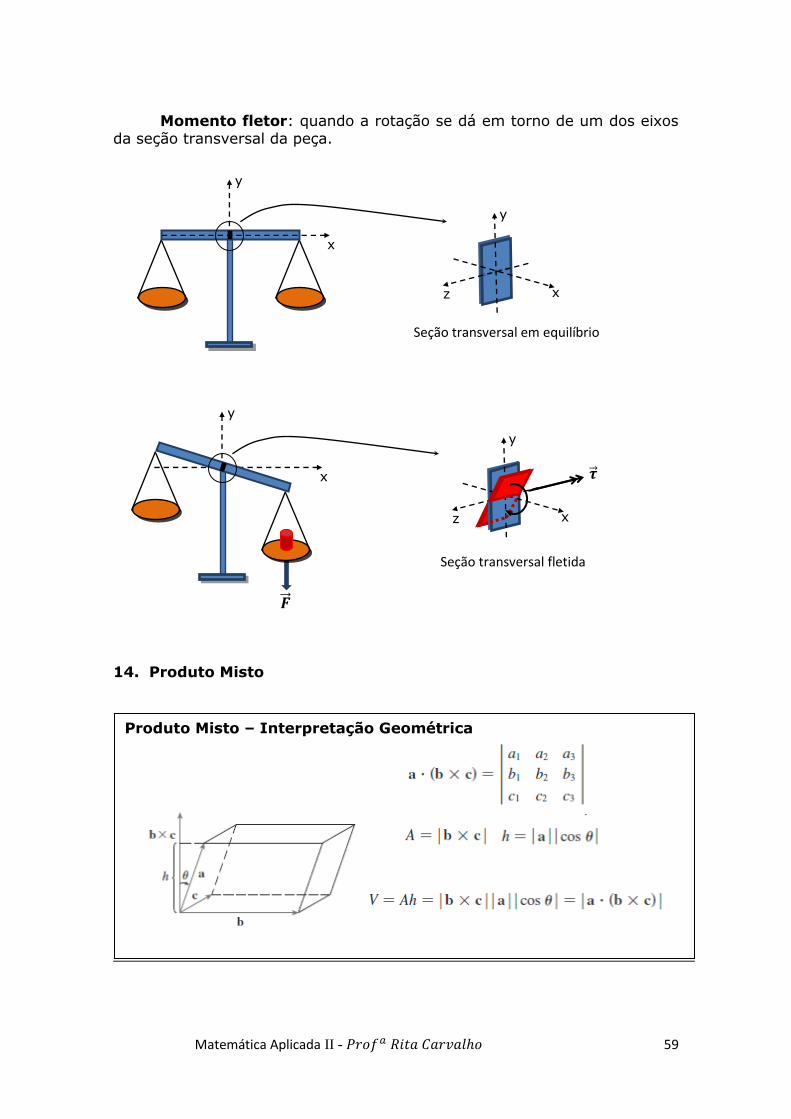
Momento fletor: quando a rotação se dá em torno de um dos eixos da seção transversal da peça.
14. Produto Misto
Produto Misto – Interpretação Geométrica
x
y
Seção transversal em equilíbrio
x
y
y
x z
y
x z
��
��
Seção transversal fletida

Matemática Aplicada II - 𝑃𝑟𝑜𝑓𝑎 𝑅𝑖𝑡𝑎 𝐶𝑎𝑟𝑣𝑎𝑙ℎ𝑜 60
Paralelismo e Perpendicularismo
𝑖) 𝑆𝑒 𝑎 × �� = 0 𝑎 𝑒 �� 𝑠ã𝑜 𝑝𝑎𝑟𝑎𝑙𝑒𝑙𝑜𝑠 (𝑠𝑒𝑛(𝜃) = 0 → 𝜃 = 0 𝑜𝑢 𝜃 = 𝜋)
𝑖𝑖) 𝑆𝑒 𝑎 . �� = 0 𝑎 𝑒 �� 𝑠ã𝑜 𝑝𝑒𝑟𝑝𝑒𝑛𝑑𝑖𝑐𝑢𝑙𝑎𝑟𝑒𝑠 (cos(𝜃) = 0 → 𝜃 =𝜋
2)
𝑖𝑖𝑖) 𝑆𝑒 𝑎 . ( �� × 𝑐 ) = 0 𝑎 , �� 𝑒 𝑐 𝑠ã𝑜 𝑐𝑜𝑝𝑙𝑎𝑛𝑎𝑟𝑒𝑠