04 MSUI Kinematika Dinamika Klipnog Mehanizma 3 Za Predavanje

BIOFIZIKAMEHANIKA − kinematika
Akademik, prof. dr Jovan P. Setraj ci c
Univerzitet u Novom Sadu
Departman za fiziku PMF
Powered by LATEX 2ε! – p. 1/13

Mehanika
PODELA
Uzrok kretanjaKinematika ⇐⇒ Dinamika + Statika
1 – p. 2/13

Mehanika
PODELA
Uzrok kretanjaKinematika ⇐⇒ Dinamika + Statika
Predmet kretanjaTacka ⇐⇒ Kruto teloFluidi ⇐⇒ Kontinum
1 – p. 2/13

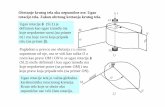
Kinematika
POLOZAJ
Radius-vektor~r = x~ex + y ~ey + z ~ez
r ≡ |~r| =√
x2 + y2 + z2 [m]
M( , , )x y z
0
y
y
y
z
z
z
x
x
x
ze
zeye
rye
xexe
1 – p. 3/13

Kinematika
POLOZAJ
Radius-vektor~r = x~ex + y ~ey + z ~ez
r ≡ |~r| =√
x2 + y2 + z2 [m]
jedna cine kretanja :
~r = ~r(t) ⇐⇒
x = x(t)
y = y(t)
z = z(t)
M( , , )x y z
0
y
y
y
z
z
z
x
x
x
ze
zeye
rye
xexe
1 – p. 3/13

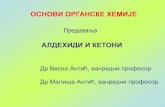
Kinematika
BRZINA
srednja brzina : ~v =∆~r
∆t;
v ≡ ∆r
∆t=
∆s
∆t
[m
s
]
M( )t
M ( )’ t- tD
0y
z
x
r
DrDs
r’
u
1 – p. 4/13

Kinematika
BRZINA
srednja brzina : ~v =∆~r
∆t;
v ≡ ∆r
∆t=
∆s
∆t
[m
s
]
trenutna brzina :
~v ≡ ~v∣
∣
∆t→0= d
dt≡ ~r ;
v ≡ v(t) = drdt
≡ r = dsdt
≡ s[
ms
]
M( )t
M ( )’ t- tD
0y
z
x
r
DrDs
r’
u
1 – p. 4/13

Kinematika
Brzina kretanja :
~v = vx ~ex + vy ~ey + vz ~ex ;
vx ≡ x , vy ≡ y , vz ≡ z
v =√
v2x + v2
y + v2z
v = v(t) ⇔ vx,y,z = vx,y,z(t)
M( )t
M ( )’ t- tD
0y
z
x
r
DrDs
r’
u
1 – p. 5/13

Kinematika
UBRZANJE
srednje ubrzanje :
~a =∆~v
∆t M( )t
M ( )’ t- tD
0y
z
x
r
aD
r’ ’
uu
u
1 – p. 6/13

Kinematika
UBRZANJE
srednje ubrzanje :
~a =∆~v
∆t
trenutno ubrzanje :
~a ≡ ~a∣
∣
∣
∆t→0=
ddt
≡ ~v ≡ ~r
M( )t
M ( )’ t- tD
0y
z
x
r
aD
r’ ’
uu
u
1 – p. 6/13

Kinematika
Ubrzanje kretanja :
~a = ax ~ex + ay ~ey + az ~ex , a =√
a2x + a2
y + a2z
ax ≡ vx ≡ x , ay ≡ vy ≡ y , az ≡ vz ≡ z
~a = ~at + ~an
a =√
a2t + a2
n
[
ms2
]
at = dvdt
[
ms2
]
, an = v2
r
[
ms2
]
M( )t
0y
z
x
rn
aa ta
1 – p. 7/13

Kinematika
ROTACIJAUgaoni pomeraj
∆ϕ: ~r′ → ~r za ∆t:∆~ϕ = ∆ϕ~eϕ ,
∆ϕ = ∆ϕ(t) [rad]
M( )t
M ( )’ t- tD
0y
z
x
r
Df
Dsr’
fe
r
w
Df
u
fe
1 – p. 8/13

Kinematika
ROTACIJAUgaoni pomeraj
∆ϕ: ~r′ → ~r za ∆t:∆~ϕ = ∆ϕ~eϕ ,
∆ϕ = ∆ϕ(t) [rad]
Ugaona brzina
~ω =d~ϕ
dt:
ω ≡ ω(t) =dϕ
dt
[
rad
s
]
M( )t
M ( )’ t- tD
0y
z
x
r
Df
Dsr’
fe
r
w
Df
u
fe
1 – p. 8/13

Kinematika
Ugaono ubrzanje
~α =d~ω
dt≡=
d2~ϕ
dt2: α = α(t)
[
rad
s2
]
1 – p. 9/13

Kinematika
Ugaono ubrzanje
~α =d~ω
dt≡=
d2~ϕ
dt2: α = α(t)
[
rad
s2
]
Veza izmedu linearnih u ugaonih veli cina
∆s = r ∆ϕ , ~v = ~ω × ~r ,
~at = ~α × ~r , ~an = −ω2~r
1 – p. 9/13

Kinematika
OBLICI KRETANJAPRAVOLINIJSKO
ravnomerno (jednoliko) kretanje :at = 0 , an = 0 , a = 0 , v = const
jednako (ravnomerno) promenljivo kretanje :at = a = const , an = 0
1 – p. 10/13

Kinematika
OBLICI KRETANJAPRAVOLINIJSKO
ravnomerno (jednoliko) kretanje :at = 0 , an = 0 , a = 0 , v = const
jednako (ravnomerno) promenljivo kretanje :at = a = const , an = 0
KRUZNOravnomerno (jednoliko) kretanje :an = a = const , ω = const
jednako (ravnomerno) promenljivo kretanje :at = const , an 6= 0 , α = const
1 – p. 10/13

Kinematika
PRAVOLINIJSKA KRETANJA
ravnomerno (jednoliko) :
a = 0 , v = const , s = v t
jednako (ravnomerno) promenljivo :
a = const , v = v0 ± a t , s = v0t ±a t2
2, v2 = v2
0 ± 2 a s
slobodan pad :
a = g , v = g t , h = g t2
2, v =
√2 g h
g = 9, 81[m
s2
]
hitac u vis :
v = v0 − g t , h = v0t −g t2
2, hmax =
v20
2g, tp =
v0
g
1 – p. 11/13

Kinematika
∗ Kosi hitac :
vx = v0x = v0 cos ϕ = const
vy = v0y − gt = v0 sin ϕ − gt
v =√
v2x + v2
y =√
vox + (v0y − gt)2
y = x tan ϕ − g x2
2 v20
cos2 ϕ
tp =v0 sin ϕ
g, tl = 2 tp = 2
v0 sin ϕ
g
Hmax =v2
0y
2g=
v2
0sin
2 ϕ
2g, D = xmax =
v2
0sin 2ϕ
g
j
0
0
y
H
D
max
x
u
1 – p. 12/13

Kinematika
KRUZNA KRETANJA
ravnomerno (jednoliko) :
α = 0 , ω = const ϕ = ω t , ω ≡ ϕ
t=
2π
T= 2π ν ,
T [s] , ν =1
T[Hz = s−1] , ν =
N
t
jednako (ravnomerno) promenljivo :
α = const , ω = ω0 ± α t
ϕ = ω0t ±α t2
2ω2 = ω2
0 ± 2α ϕ
1 – p. 13/13