Working Mini Model on Transfer of Power By Using Belt Friction
6
Click here to load reader
-
Upload
simran-singh-bansal -
Category
Science
-
view
157 -
download
2
description
The full reference guide to "Working Mini Model on Transfer of Power By Using Belt Friction" madeup by IIU B.Tech 1st year students batch 2013-14.
Transcript of Working Mini Model on Transfer of Power By Using Belt Friction


Parminder Singh, Rajat Shukla, Simran Bansal, Vinay Thakur, Amit Kumar 2
Project: To Transfer energy with belt friction
Apparatus:
A Transformer, 2 Diodes, 1 Capacitor(100μF), Two motors(D.C), a belt, a LED.
Principle: It works on the principle of rope or belt friction which states that, the energy can
be transferred from one pulley to another with the help of rope or belt.
Theory:
Rope or Belt friction: Rope or belt friction is used to transfer power from one pulley to
another pulley. Where one pulley is driver pulley and other is driven as shown in fig. below.
Let us suppose that a weight pulled with help of a pulley. Let T2 is the tension in the pulling end and T1 is the tension in the weight end. T2 > T1, if friction between pulley and belt or rope contact surface. T2 = T1, if friction between pulley and belt or rope is less.
F
Tight

Parminder Singh, Rajat Shukla, Simran Bansal, Vinay Thakur, Amit Kumar 3
Let us suppose a small part of rope within contact of small portion of drum. In equilibrium:
∑ Fx = 0
∑ Fy = 0
So,
Ft + cosdθ
2− (T + dt) cos
dθ
2= 0
And;
R − (T + dt) sindθ
2= −t sin
dθ
2= 0
⇒ μR + t cosdθ
2− (T + dt) cos
dθ
2= 0
⇒ R − T sindθ
2− dt sin
dθ
2− t sin
dθ
2= 0
R − 2t sindθ
2− dt sin
dθ
2= 0
μR − dt cosdθ
2= 0
Since dθ → 0 so;
cos𝑑𝜃
2= 1
sindθ
2=
dθ
2
So,
μR − dt = 0 ⇒ μR = dt
Also;
R − 2Tdθ
2− dtdt ⇒ R = 2T
dθ
2⇒ R = Tdθ
𝑀𝑇𝑑𝜃 = 𝑑𝑡 ⇒ 𝑑𝑡 = 𝑀𝑇𝑑𝜃 ⇒ 𝑑𝑡
𝑇= 𝜇𝑑𝜃
𝐝𝛉
𝐝𝛉
𝟐 𝐝𝛉
𝟐
T 𝐅𝐭𝐝𝐭
R
F (𝐓 + 𝐝𝐭) 𝐜𝐨𝐬 𝐝𝛉
𝟐 𝐓 𝐜𝐨𝐬
𝐝𝛉
𝟐
𝐓 𝐬𝐢𝐧𝐝𝛉
𝟐
(𝐓 + 𝐝𝐭) 𝐬𝐢𝐧𝒅𝜽
𝟐

Parminder Singh, Rajat Shukla, Simran Bansal, Vinay Thakur, Amit Kumar 4
Now integrate both sides:
∫dT
T
T2
T1
= ∫ μdθθ
0
⇒ log T2 − log T1
= μθ ⇒ logT2
T1= μθ
⇒ T2 = T1𝑒μθ
Formulae used:
1. Belt Length:
The length of the belt can be calculated as:
lb = (d2 + d1) + (2 ld)
where:
lb = length of belt
d1 = diameter of pulley 1
d2 = diameter of pulley 2
ld = center to center distance between two motor pulleys
2. Belt Velocity:
The velocity at which a belt travels may be expressed as:
v = π d1 n1
Where:
v = velocity of belt (mm/min)
n1 = velocity motor (rpm)
3. Belt Tension:
If horse power and belt velocity are known – belt tension can be calculated as:
T = Php ×n1 for motor 1 and n2 for motor 2
V
Where:
Php = power (hp)
T = belt tension (lbf)
v = velocity of belt (ft/min)
4. Speed ratio:
SR = Rf / Rs
Where:
SR = speed ratio
Rf = revolutions per minute - fastest machine
Rs = revolutions per minute - slowest machine

Parminder Singh, Rajat Shukla, Simran Bansal, Vinay Thakur, Amit Kumar 5
5. To find coefficient of friction:
T2 = T1𝑒μθ
(1
θ) log
T2
T1= μ
Where: T1 = Tension between belt and motor M1 T2 = Tension between belt and motor M2 μ = Friction coefficient of belt and pulley. θ = Angle between belt and pulley.
Construction:
Draw the circuit diagram on the assembly board and adjust the all components as shown in
following diagram:
Working:
If we looked at the circuit diagram then we have two areas:
1. Rectifier: The rectifier circuit convers ac power to dc. Here we use the rectifier
provide 5V dc. We use rectifier because, we have two dc motors which are going to
use in the project.
2. Energy Transfer: In this partition we have two dc motors M2 and M1. The input
current power supply is connected to motor M2 and a LED is connect to motor M1.
The two motors are attached to each other with the help of a belt and pullies. The
pulley of M2 is larger than M1 because when the motor M2 will rotates then the
rotations of M1 will more than the motor M2 and we can get more output then input.
when the motor M2 rotates then in M2 the electrical energy is converted into
mechanical energy and as it connected to motor M1 with the help of the belt so, motor
M1 also rotates and converts mechanical energy into electrical energy and we get the
electrical output on its two terminals and the LED connected to M1 start lighting.
Rectifier Energy Transfer
Circuit Diagram

Parminder Singh, Rajat Shukla, Simran Bansal, Vinay Thakur, Amit Kumar 6
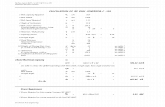
Observations:
Diameter of pulley 1(d1): 13mm Diameter of pulley 2(d2): 21mm
Center to center distance of two motor pulleys(ld): 45mm
Velocity of motor, n1: 3876rpm
Velocity of motor, n2: 2300rpm
Horse power of motor m2(driver): 0.0036hp
Angle between pulley and belt(θ): 900
Calculations:
1. For Belt length(lb):
lb = (13 + 21) + (2 × 45) = 124mm
2. Belt velocity(v):
v = π × 13 × 3876 = 158298.57mm/ min or 519.351 ft/min
3. Belt tension:
T1 For motor(M1):
T1 = 0.0036 ∗3876
519.351 = 0.026N
T2 For motor(M2):
T2 = 0.0036 ∗2300
519.351 = 0.015N
Total Tension T:
T = 0.026 + 0.015 = 0.041
4. Speed ratio:
SR =3876
2400= 1.615
5. Coefficient of friction(𝛍):
*Note: In our project the T1 and T2 has been inter exchanged so we also interexchange
these values in the formulae and calculation of 𝛍.
μ = (1
90) log
0.26
0.15= 2.65 × 10−3