TRATAMIENTO ESTADÍSTICO DE SEÑALES. DETECCIÓN Y...
25
TRATAMIENTO ESTADÍSTICO DE SEÑALES. DETECCIÓN Y ESTIMACIÓN ENUNCIADOS DE PROBLEMAS TEORÍA DE LA DETECCIÓN Problema 1 Un sistema puede estar en uno de dos posibles estados, H 0 y H 1 . Las funciones de verosimilitud en cada caso son: ( ) ( ) ) ( 2 1 | : ) ( z 2 1 | : 2 2 2 2 1 1 2 0 0 z u e H z f H z u e H z f H z z σ σ σ π σ − − = = Obtenga: a) La regla de decisión óptima de mínima probabilidad de error supuesto P(H 0 )=P(H 1 ) utilizando una única medida. b) Obtenga la expresión para el cálculo de la probabilidad media de error. NOTA: ( ) ∫ ∞ − = x dx x x erfc 2 exp 2 ) ( π Problema 2 Un sistema puede estar en uno de dos posibles estados, H 0 y H 1 . Las funciones de verosimilitud en cada caso son: ( ) ( ) ) ( 2 1 | : ) ( z 2 1 | : 2 2 2 2 1 1 2 0 0 z u e H z f H z u e H z f H z z σ σ σ π σ − − = = Utilizando una única medida se quiere contrastar la hipótesis H 0 , frente a la hipótesis H 1 . a) Encontrar las regiones críticas y de aceptación de cada hipótesis en función de P(H 0 ) y de P(H 1 ), bajo el criterio de minimizar el riesgo, si C 00 =C 11 =0 y C 01 =C 10 =1. b) Suponiendo desconocidas las probabilidades a priori de ambas hipótesis, busque la regla de decisión con los costes del apartado anterior, siguiendo el criterio que permite obtener el valor máximo de los riesgos mínimos. c) ¿Cuál sería la probabilidad media de error en el caso anterior?
Transcript of TRATAMIENTO ESTADÍSTICO DE SEÑALES. DETECCIÓN Y...
TRATAMIENTO ESTADÍSTICO DE SEÑALES.
DETECCIÓN Y ESTIMACIÓN
ENUNCIADOS DE PROBLEMAS TEORÍA DE LA DETECCIÓN Problema 1 Un sistema puede estar en uno de dos posibles estados, H0 y H1. Las funciones de verosimilitud en cada caso son:
( )
( ) )(2
1| :
)(z 2
1| :
2
2
2211
200
zueHzfH
zueHzfH
z
z
σ
σ
σ
πσ−
−
=
=
Obtenga:
a) La regla de decisión óptima de mínima probabilidad de error supuesto P(H0)=P(H1) utilizando una única medida.
b) Obtenga la expresión para el cálculo de la probabilidad media de error.
NOTA: ( )∫∞
−=x
dxxxerfc 2exp2)(π
Problema 2 Un sistema puede estar en uno de dos posibles estados, H0 y H1. Las funciones de verosimilitud en cada caso son:
( )
( ) )(2
1| :
)(z 2
1| :
2
2
2211
200
zueHzfH
zueHzfH
z
z
σ
σ
σ
πσ−
−
=
=
Utilizando una única medida se quiere contrastar la hipótesis H0, frente a la hipótesis H1.
a) Encontrar las regiones críticas y de aceptación de cada hipótesis en función de P(H0) y de P(H1), bajo el criterio de minimizar el riesgo, si C00=C11=0 y C01=C10=1.
b) Suponiendo desconocidas las probabilidades a priori de ambas hipótesis, busque la regla de decisión con los costes del apartado anterior, siguiendo el criterio que permite obtener el valor máximo de los riesgos mínimos.
c) ¿Cuál sería la probabilidad media de error en el caso anterior?

Problemas de Señales y Sistemas II
2/25
Problema 3 Un sistema genera datos bajo una función densidad de probabilidad de Cauchy, de la cual se desconoce el valor del parámetro θ:
( )[ ]211)|(
θπθ
−+=
xxf
Utilizando una única medida se quiere contrastar la hipótesis H0: θ=1, frente a la hipótesis H1:θ= -1.
d) Suponiendo desconocidas las probabilidades a priori de ambas hipótesis, busque la regla de decisión siguiendo el criterio que permite obtener el valor máximo de los riesgos mínimos, si C00=C11=0 y C01=C10=1.
e) ¿Cuál sería la probabilidad media de error? Problema 4 Se supone que bajo la hipótesis H1 se observa una variable aleatoria de tipo Maxwell, mientras que bajo la hipótesis H0 se observa una variable aleatoria de tipo Rayleigh, con las siguientes funciones de densidad de probabilidad:
2
2
20
2 21
( | ) ( )
( | ) ( )
x
x
f x H x e u x
f x H x e u x
−
−
=
=
Se desea diseñar un sistema que permita decidir por una u otra hipótesis. Para ello, se desean utilizar criterios Bayesianos, pero las probabilidades a priori de cada hipótesis son desconocidas. Si los costes asignados a cada decisión son los siguientes: C00=C11=0; C01=C10=1,
a) Obtenga la ecuación que permite obtener el umbral de decisión que haría máximo al coste medio mínimo.
b) Si el valor de dicho umbral es γ = 1,2823, ¿cuánto vale la probabilidad de pérdida PM? c) Si se aplica el criterio de mínima probabilidad de error, ¿cuál es el valor de P(H1) que
daría lugar al umbral indicado en el apartado anterior? Problema 5 El receptor de un sistema con dos hipótesis, Ho y H1, utiliza las siguientes observaciones:
y :
:22
1
0
+=
=
xzH
xzH
Donde x e y son v.a. independientes y gaussianas de media nula e igual varianza ( 2σ ). Obtener:

Problemas de Señales y Sistemas II
3/25
a) Considerando que ambas hipótesis son equiprobables y aplicando el criterio de mínima probabilidad de error, obtenga la regla de decisión y dibuje las regiones críticas y de
aceptación para ambas hipótesis, en el caso en que 221 πσ = .
b) Calcule la probabilidad media de error. c) Repita el apartado a) al duplicar el valor de σ.
NOTA: ( )zuzyxf
yxz
⎟⎟⎠
⎞⎜⎜⎝
⎛−=+
+=
2222
22
2exp
21)(
esindependnt e gaussianasy x,,
σσ
Problema 6 Considere un problema de comunicaciones ternario, en el que se pueden transmitir las siguientes señales con igual probabilidad:
0
1
2
( ) 0 0( ) ( ) 0( ) 2 ( ) 0
o
o
s t t Ts t sen t t Ts t sen t t T
ωω
= ≤ ≤= ≤ ≤= ≤ ≤
siendo 02Tπω = . Las señales se transmiten por un canal que introduce ruido gausiano con
función de autocorrelación: 0( ) ( )2
Nρ τ δ τ= .
a) Diseñe el receptor que minimiza la probabilidad de error y obtenga las funciones de verosimilitud bajo cada hipótesis necesarias para la obtención del criterio de decisión.
b) Obtenga la expresión para el cálculo de las probabilidades de detección para cada hipótesis, en los supuestos presentados anteriormente.
Problema 7
QAM es un esquema ampliamente usado en comunicaciones digitales. Se transmite una de cuatro formas de onda, correspondientes a uno de cuatro símbolos equiprobables posibles en el intervalo [0,T].
2( ) cos (2 1) , 0,1,2,34i c
Es t t i iT
πω⎛ ⎞= − + =⎜ ⎟⎝ ⎠
Se supone que estas señales se transmiten por un canal que introduce ruido blanco gausiano de media nula y densidad espectral de potencia No/2. Se desea diseñar un receptor óptimo basado en correladores siguiendo el criterio de mínima probabilidad de error.
a) Dibuje el diagrama de bloques del receptor indicado, añadiendo las expresiones de las funciones necesarias para su implementación, y el espacio de señal correspondiente.
b) Obtenga razonadamente las funciones de verosimilitud necesarias para obtener los criterios de decisión y las regiones críticas y de aceptación bajo cada hipótesis.
c) Proporcione una expresión para la probabilidad media de error.

Problemas de Señales y Sistemas II
4/25
Problema 8 Una fuente de símbolos genera uno de entre cuatro símbolos equiprobables. En el sistema de comunicaciones, el modulador construye y asigna una señal a cada uno de los símbolos que se pueden generar. Las señales generadas y transmitidas por el sistema se pueden expresar en función de dos señales ortonormales, tal y como se deduce del espacio de señal de la figura. Estas señales se transmiten por un canal que introduce ruido blanco gaussiano de media nula y densidad espectral de potencia No/2. Obtener de forma razonada:
a) El esquema del receptor óptimo basado en la representación vectorial de señales y las funciones de verosimilitud necesarias para encontrar las regiones críticas y de aceptación bajo cada hipótesis.
b) Regiones críticas y de aceptación utilizando el criterio MAP si las hipótesis son equiprobables.
c) Obtener la experesión de la probabilidad media de error y dibujar de forma aproximada su tendencia en función de E .
Problema 9
En un sistema de transmisión digital binario, el receptor óptimo basado en la representación vectorial de señales es sustituido por un filtro RC. Sean s1(t) y s2(t) las señales recibidas en el receptor con igual probabilidad a priori:
1 20 ( ) 0Es (t) y s t t TT
= = ≤ ≤
El canal introduce ruido blanco y gaussiano de media nula y varianza No/2. La respuesta impulsiva del filtro RC utilizado en el receptor se puede expresar como:
1( ) ( )tTh t e u t
T−=
Calcular a) Probabilidad media de error. b) Incremento de energía transmitida para mantener la misma probabilidad de error.
4s 3s
1s 0s π/4
g2( t )
g1( t )
π/4
is E=

Problemas de Señales y Sistemas II
5/25
Problema 10 En la modulación PSK M-aria, las señales consideradas son:
11002cos20 ,...,M-,T; it
Mπ itω
TE(t)yi =≤≤⎟
⎠⎞
⎜⎝⎛ +=
Asumiendo que hay un número entero de ciclos de la portadora en cada intervalo de señal y que todas las señales se dan con la misma probabilidad a priori:
c) Represente el diagrama de bloques del receptor óptimo basado en la representación vectorial con señales ortonormales, indicando cuáles son los vectores de la base utilizada si el canal por el que se van a transmitir las señales yi(t) introduce ruido blanco gaussiano de media nula y densidad espectral de potencia No/2.
d) En las condiciones del apartado anterior, encontrar razonadamente las regiones críticas y de aceptación de cada hipótesis suponiendo el criterio de mínima probabilidad de error.
e) Obtener la expresión para el cálculo de la probabilidad media de error. Problema 11 En un sistema de comunicaciones digitales, que utiliza una modulación BPSK, se transmiten las siguientes señales:
( ) 10 ;2cos2)( , iitfTEts ci =+= ππ
El canal introduce ruido blanco gaussiano de media nula y varianza No/2. Se quiere diseñar un receptor basado en la representación vectorial de señales. Determinar: a) Dimensión del espacio vectorial para representar las señales si(t), así como una base de
funciones ortonormales del mismo. b) Obtenga las regiones críticas y de aceptación de cada una de las hipótesis, suponiendo que
son equiprobables, aplicando el criterio de Bayes de mínima probabilidad de error. c) Obtenga una expresión para la probabilidad media de error, en función de la función de
error complementario. d) Si las funciones de la base ortonormal que utiliza el receptor sufren un desfase de φ
radianes, obtenga la expresión de la probabilidad media de error en estas circunstancias, y compárela con la obtenida en el apartado c). Comente los resultados.
Problema 12 Un sistema de comunicaciones digitales utiliza modulación PSK, donde las señales de referencia son:
10 2sen2)( 0 N-i iN
tTEtsi ≤≤⎟
⎠⎞
⎜⎝⎛ +=
πω
Estas señales se transmiten por un canal que introduce ruido blanco gaussiano de media nula y densidad espectral de potencia (d.e.p.) No/2. Se implementa un receptor basado en la
Problemas de Señales y Sistemas II
6/25
representación vectorial de señales. Si )( 2 NN ∈= γγ , conteste razonadamente a las siguientes preguntas: a) ¿Cuál es la dimensión del espacio de señal? Obtenga también la expresión de las
componentes de los vectores de señal. b) Suponiendo que todos los símbolos son equiprobables, obtener en función de No y N, una
expresión para la probabilidad de error total, si en el detector se utiliza un criterio de mínima probabilidad de error.
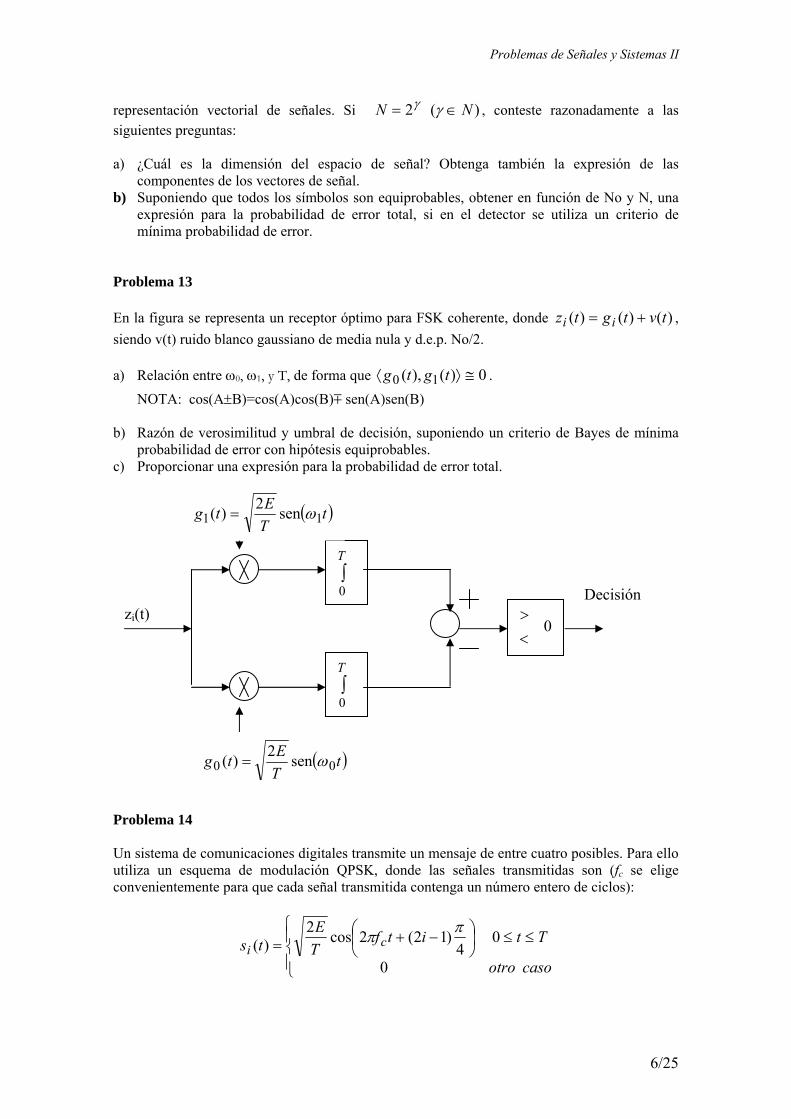
Problema 13 En la figura se representa un receptor óptimo para FSK coherente, donde )()()( tvtgtz ii += , siendo v(t) ruido blanco gaussiano de media nula y d.e.p. No/2. a) Relación entre ω0, ω1, y T, de forma que 0)(),( 10 ≅⟩⟨ tgtg .
NOTA: cos(A±B)=cos(A)cos(B)m sen(A)sen(B) b) Razón de verosimilitud y umbral de decisión, suponiendo un criterio de Bayes de mínima
probabilidad de error con hipótesis equiprobables. c) Proporcionar una expresión para la probabilidad de error total. Problema 14 Un sistema de comunicaciones digitales transmite un mensaje de entre cuatro posibles. Para ello utiliza un esquema de modulación QPSK, donde las señales transmitidas son (fc se elige convenientemente para que cada señal transmitida contenga un número entero de ciclos):
⎪⎩
⎪⎨⎧
≤≤⎟⎠⎞
⎜⎝⎛ −+=
casootro
TtitfTE
ts ci 0
04
)12(2cos2)(
ππ
∫T
0
∫T
0
0 <>
zi(t)
Decisión
( )tTEtg 11 sen2)( ω=
( )tTEtg 00 sen2)( ω=

Problemas de Señales y Sistemas II
7/25
La señal se transmite por un canal que introduce ruido blanco gaussiano, de media cero y varianza N0/2. En el receptor se pretende utilizar un detector basado en la representación vectorial de señales. Obtenga: a) Dimensión del espacio vectorial y una base ortonormal del mismo. b) Utilizando un criterio de Bayes, con Cii=0 y Cij=1 para hipótesis equiprobables, obtenga las
regiones críticas y de aceptación de cada una de las posibles hipótesis. c) Proporcione una expresión para el cálculo de P(D1|H1). Problema 15 Se pretende diseñar un sistema capaz de distinguir voz natural de voz sintética generada con un codificador CELP (Code-Excited Linear Prediction). Para el diseño del detector se suponen las siguientes hipótesis: H0: Voz natural.Se supone que la voz natural en tramos cortos es una señal aleatoria
estacionaria con f.d.p. laplaciana de media nula.
H1: Voz sintética. En un sistema CELP la voz se obtiene excitando un filtro lineal con una secuencia gaussiana.
El detector debe tomar la decisión utilizando únicamente una muestra de la señal observada; incorpora además, un procesado previo, de forma que la varianza de la señal observada por el detector es la unidad. Con estos datos:
a) Establezca la razón de verosimilitud. b) Para C00=C11=0 y C01=C10=1, encuentre las regiones críticas y de aceptación para
cada una de las hipótesis si ambas son equiprobables.
Nota: ∫ −−−− −−−= zzzz ezeezdzez 2222 Problema 16 En un sistema binario coherente PSK, el par de señales utilizadas para representar los símbolos 0 y 1 se definen como:
( )
( ) Tt0 2cos2
)(
Tt0 2cos2
)(
b1
b0
<≤+=
<≤=
ππ
π
tfTE
ts
tfTE
ts
cb
b
cb
b
Eb es la energía por bit de la señal transmitida y fc se elige convenientemente para que cada señal transmitida contenga un número entero de ciclos. Estas señales se transmiten por un canal ruidoso, que introduce ruido blanco gaussiano de media nula, con densidad espectral de potencia N0/2. En estas condiciones: a) Suponiendo que el receptor utiliza una representación vectorial de las señales con una base
ortonormal, encontrar la dimensión del espacio vectorial y un ejemplo de funciones que constituyan una base ortonormal del mismo.
b) Designando como hipótesis H0 a la transmisión de s0(t) y H1 a la transmisión de s1(t), encontrar f(z| H0) y f(z| H1).
c) Suponiendo que P(H0)=2·P(H1), encontrar el umbral de decisión y expresiones para el cálculo de las probabilidades de los errores tipo I y II (falsa alarma y pérdida, respectivamente), utilizando el criterio de la mínima probabilidad de error.
Problemas de Señales y Sistemas II
8/25
Problema 17 Se pretende diseñar un sistema radar, que detecte la presencia de un blanco. Se designa H0 a la hipótesis que significa que no hay blanco presente y H1 a la hipótesis alternativa. Este sistema utiliza para la detección el eco producido por el blanco, que es recibido como una señal s(t) de duración T. Suponemos que esta señal es de energía unidad y que se recibe contaminada con ruido blanco y gaussiano de media nula y densidad espectral de potencia N0/2. En estas condiciones: a) Dibuje un diagrama de bloques del detector radar basado en correlador. b) Proporcione una expresión para el umbral de decisión utilizando la salida del correlador,
siguiendo un criterio de Neyman-Pearson, con PF=0,01. c) Razone cuál es la evolución del umbral de detección encontrado con respecto a la varianza
del ruido sobre el eco. DATO: erfc(1,645)=0,02. Problema 18
Se pueden transmitir dos señales ortonormales g0(t) y g1(t) por un canal con ruido blanco gaussiano, de media nula y varianza No/2. Se dispone de un receptor basado en la representación vectorial de ambas señales. Como vectores de la base se eligen las mismas señales transmitidas. El receptor implementa el criterio de decisión de Bayes, con mínima probabilidad de error.
a) Encontrar la expresión de la razón de verosimilitud. b) Obtenga razonadamente las regiones críticas y de aceptación de cada una de las
hipótesis si son equiprobables. c) Obtenga una expresión integral para la probabilidad de falsa alarma (detectar g1(t)
cuando se transmitió g0(t)). Problema 19 En un problema de detección binario, bajo la hipótesis nula se transmite una señal de amplitud nula y duración T unidades de tiempo. Bajo la hipótesis alternativa, se transmite una señal de amplitud unidad y de la misma duración. La señal se transmite por una canal que añade ruido de media nula, uniformemente distribuido, con varianza 0,5. En el receptor se muestrea la señal en el punto medio del intervalo de duración, tomándose dicha muestra como observación para realizar la detección. Suponiendo que el coste por no cometer errores es cero y que el coste por cometer algún error es la unidad, obtener:
a) Encuentre las expresiones de las funciones de verosimilitud. b) Encuentre el umbral con el que se maximiza el riesgo mínimo, con los costes
mencionados, y el valor del máximo riesgo mínimo. Problema 20 Considere un problema de detección en el que bajo la hipótesis nula (H0) se recibe r(t)=t+0,5t2+n(t), para -1 ≤ t ≤ 1, donde n(t) es un proceso de ruido blanco gaussiano de media nula y varianza unidad, que se añade en el canal a la señal transmitida. Bajo la hipótesis

Problemas de Señales y Sistemas II
9/25
alternativa (H1) se recibe r(t)=0,5t+t2+n(t), para -1 ≤ t ≤1. Si P(H0)=P(H1), C00=C11=0, y C01=C10=1:
a) Obtenga una representación de las señales transmitidas utilizando una base de vectores ortonormales.
b) Represente el diagrama de bloques de un detector que se base en la representación vectorial de señales, y encuentre las funciones de verosimilitud necesarias para resolver el problema de detección.
c) ¿Cuáles son las regiones críticas y de aceptación de cada hipótesis? Problema 21 Un alumno aplicado de la asignatura Señales y Sistemas II se pregunta si debe intervenir en el aula cuando cree ver un error en la pizarra. Si interviene y el profesor no ha cometido ningún error, siente cierta vergüenza. Por lo tanto, quiere realizar un estudio que le permita intervenir con una probabilidad de éxito elevada. Sea H1 el caso en el que realmente hay un error en la pizarra y H0 el caso en el que no hay error en la pizarra. Fruto de la experiencia del alumno a lo largo de los años, ha modelado la relación entre el nivel de murmullo en clase (en dB de nivel de presión sonora) y la probabilidad de que el profesor cometa un error en la pizarra. En concreto, el alumno ha llegado a conocer la función de densidad de probabilidad de la variable aleatoria que describe el nivel de murmullo de los alumnos para las dos hipótesis descritas:
)(3)|(
)()|(3
1
0
yueHyf
yueHyfy
y
−
−
=
=
El alumno quiere decidir si interviene o no, dependiendo del nivel de murmullo en el aula:
a) Diseñe la regla de decisión con el criterio de mínima probabilidad de error, indicando cuáles son las regiones críticas y de aceptación en función de las probabilidades a priori de las clases, para los casos: P(H0)<3P(H1), P(H0)>3P(H1).
b) Si desconoce la probabilidad a priori de que el profesor cometa un error, diseñe la regla de decisión que permite que el riesgo sea igual al riesgo mínimo máximo. Suponga que los costes son Cij=1 y Cii=0.
c) Diseñe la regla de decisión que maximiza PD y que mantiene PFA≤0,05. d) ¿Cuáles son los valores de PD y PFA en ambos casos? ¿Qué regla de decisión es más
conveniente, en términos generales? Problema 22 Considere un sistema de comunicaciones en el que se utilizan cuatro señales equiprobables que
pueden descomponerse utilizando las señales básicas ttg 23)(1 = y 2
2 25)( ttg = ,
definidas en el intervalo [-1,1]. Las señales transmitidas se reciben en el receptor contaminadas con ruido blanco y gaussiano de media nula y varianza unidad. El receptor está basado en el uso de correladores y se sigue el criterio de mínima probabilidad de error. Si las señales a transmitir se expresan como:
)()()( 21 tgtgts iii βα +=

Problemas de Señales y Sistemas II
10/25
a) Determine de forma razonada los valores de los coeficientes para cada señal, si las relaciones señales a ruido a las salidas de los correladores pueden ser de cero o dos, pero nunca de forma simultánea cero, ni dos.
b) Determine las fronteras de las regiones críticas y de aceptación para las posibles hipótesis del problema.
c) Proporcione una expresión (sin proporcionar valor numérico) de la probabilidad media de error.
Problema 23 Considere un problema de detección con las siguientes hipótesis:
H0: Y= N H1: Y=N+S
donde N y S son variables aleatorias independientes, ambas con función de densidad de probabilidad del tipo: ( ) )(xuexf x−= .
a) Encuentre el cociente de funciones de verosimilitud b) Encuentre el umbral de detección y la probabilidad de detección del detector diseñado
con el criterio Neyman-Pearson, cuando PFA≤α. Problema 24 QAM es un esquema ampliamente usado en comunicaciones digitales. Se transmite una de cuatro formas de onda, correspondientes a uno de cuatro símbolos equiprobables posibles en el intervalo [0,T].
2( ) cos (2 1) , 0,1,2,34i c
Es t t i iT
πω⎛ ⎞= − + =⎜ ⎟⎝ ⎠
Se supone que estas señales se transmiten por un canal que introduce ruido blanco gausiano de media nula y densidad espectral de potencia No/2. El canal modifica la amplitud de la señal transmitida, que pasa a ser Asi(t), siendo A una variable aleatoria gaussiana de media ηA =1 y varianza 2
Aσ =1, independiente del ruido. Se desea diseñar un receptor óptimo siguiendo el criterio de mínima probabilidad de error.
d) Dibuje los diagramas de bloques del receptor basado en la representación vectorial de señales y en filtros lineales y sistemas de muestreo, obteniendo de forma razonada las expresiones de las funciones necesarias para su implementación.
e) Obtenga razonadamente las funciones de verosimilitud necesarias para obtener los criterios de decisión y las regiones críticas y de aceptación bajo cada hipótesis. Comente la influencia de la constante de atenuación A en la probabilidad media de error.
Problema 25 Suponga que bajo la hipótesis H1, la variable aleatoria X tiene la siguiente función de densidad de probabilidad:
( ))1()1(23)|( 2
1 −−+= xuxuxHxf X
Bajo la hipótesis H0, la variable aleatoria está uniformemente distribuida en [-1, 1].
Problemas de Señales y Sistemas II
11/25
a) Encuentre la regla de decisión y las regiones críticas y de aceptación de cada hipótesis, si ambas hipótesis son equiprobables, siguiendo el criterio de mínima probabilidad de error.
b) Teniendo en cuenta el resultado del apartado anterior, suponiendo los mismos costes, encuentre la regla de decisión que hace máximo al coste medio mínimo. En este detector, ¿cuánto vale el riesgo bayesiano si P(H1)=0,25?
c) Diseñe el detector que maximiza la probabilidad de detección, sujeto a la restricción de mantener la probabilidad de falsa alarma menor o igual a 0,1. ¿Cuánto vale la probabilidad de detección en ese caso?
NOTA: ( )( )4655,16823,06823,01 23 +−−=−+ ααααα
Problema 26
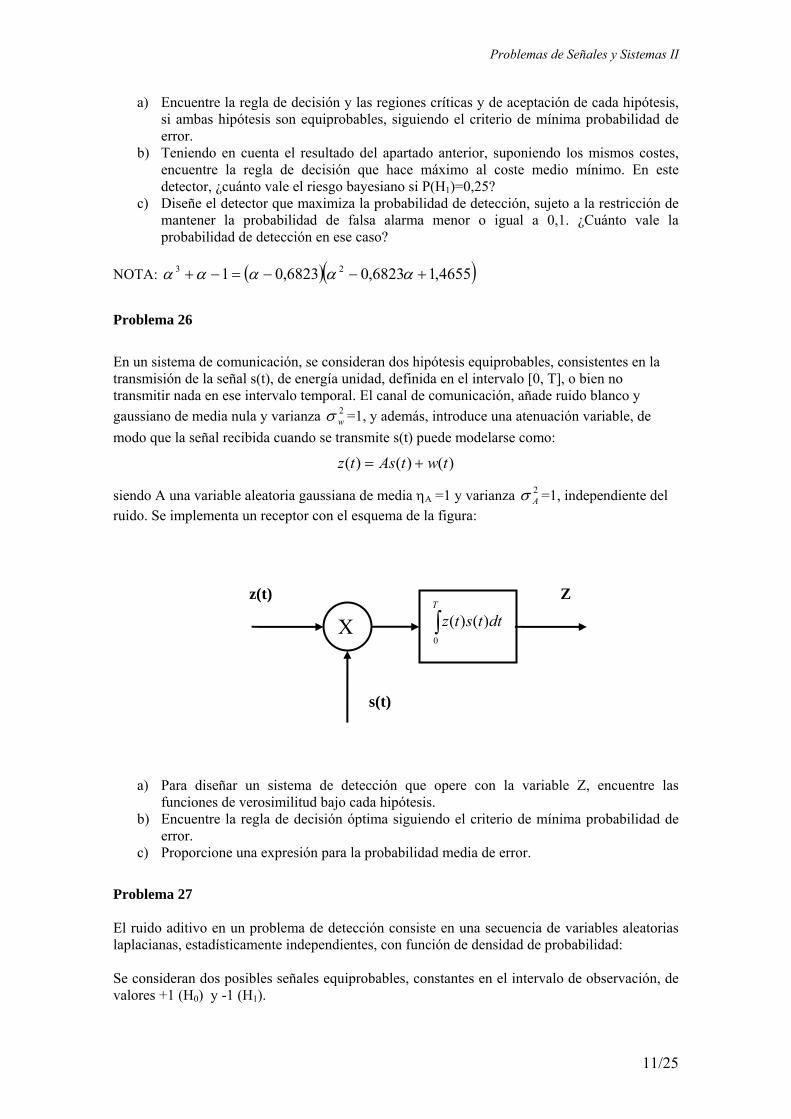
En un sistema de comunicación, se consideran dos hipótesis equiprobables, consistentes en la transmisión de la señal s(t), de energía unidad, definida en el intervalo [0, T], o bien no transmitir nada en ese intervalo temporal. El canal de comunicación, añade ruido blanco y gaussiano de media nula y varianza 2
wσ =1, y además, introduce una atenuación variable, de modo que la señal recibida cuando se transmite s(t) puede modelarse como:
)()()( twtAstz +=
siendo A una variable aleatoria gaussiana de media ηA =1 y varianza 2Aσ =1, independiente del
ruido. Se implementa un receptor con el esquema de la figura:
a) Para diseñar un sistema de detección que opere con la variable Z, encuentre las funciones de verosimilitud bajo cada hipótesis.
b) Encuentre la regla de decisión óptima siguiendo el criterio de mínima probabilidad de error.
c) Proporcione una expresión para la probabilidad media de error.
Problema 27 El ruido aditivo en un problema de detección consiste en una secuencia de variables aleatorias laplacianas, estadísticamente independientes, con función de densidad de probabilidad:
Se consideran dos posibles señales equiprobables, constantes en el intervalo de observación, de valores +1 (H0) y -1 (H1).
∫T
dttstz0
)()( X z(t) Z
s(t)
Problemas de Señales y Sistemas II
12/25
a. Encuentre la regla de decisión óptima, usando una sola muestra de la señal ruidosa, con el criterio de mínima probabilidad de error, y las correspondientes regiones críticas y de aceptación de cada hipótesis.
b. Aplicando el criterio de Neyman-Pearson, exprese en función de PFA, el umbral de detección que separa las regiones de aceptación de una y otra hipótesis.
c. ¿Cuál es el valor del umbral con el que se cumple PFA=1-PD? ¿Equivale este umbral al obtenido aplicando algún criterio conocido?
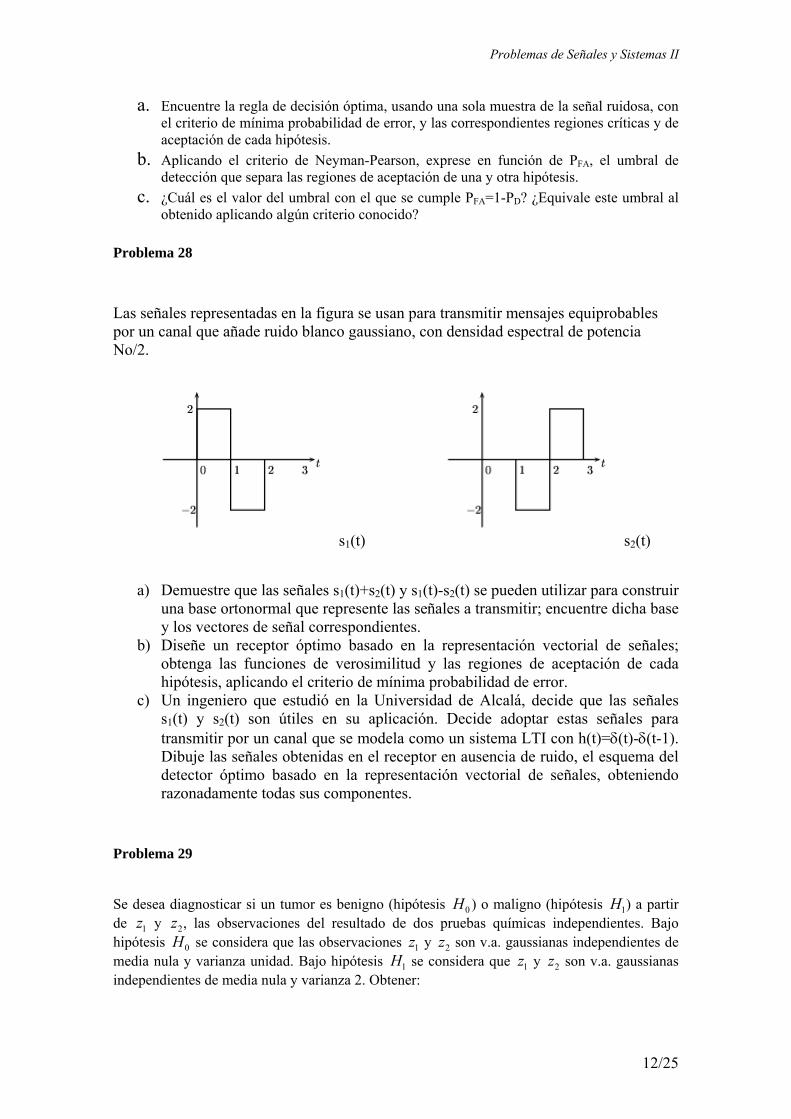
Problema 28
Las señales representadas en la figura se usan para transmitir mensajes equiprobables por un canal que añade ruido blanco gaussiano, con densidad espectral de potencia No/2.
a) Demuestre que las señales s1(t)+s2(t) y s1(t)-s2(t) se pueden utilizar para construir una base ortonormal que represente las señales a transmitir; encuentre dicha base y los vectores de señal correspondientes.
b) Diseñe un receptor óptimo basado en la representación vectorial de señales; obtenga las funciones de verosimilitud y las regiones de aceptación de cada hipótesis, aplicando el criterio de mínima probabilidad de error.
c) Un ingeniero que estudió en la Universidad de Alcalá, decide que las señales s1(t) y s2(t) son útiles en su aplicación. Decide adoptar estas señales para transmitir por un canal que se modela como un sistema LTI con h(t)=δ(t)-δ(t-1). Dibuje las señales obtenidas en el receptor en ausencia de ruido, el esquema del detector óptimo basado en la representación vectorial de señales, obteniendo razonadamente todas sus componentes.
Problema 29 Se desea diagnosticar si un tumor es benigno (hipótesis H0 ) o maligno (hipótesis H1) a partir de z1 y z2, las observaciones del resultado de dos pruebas químicas independientes. Bajo hipótesis H0 se considera que las observaciones z1 y z2 son v.a. gaussianas independientes de media nula y varianza unidad. Bajo hipótesis H1 se considera que z1 y z2 son v.a. gaussianas independientes de media nula y varianza 2. Obtener:
s1(t) s2(t)

Problemas de Señales y Sistemas II
13/25
a) La regla de decisión óptima de mínima probabilidad de error utilizando las dos observaciones, supuesto P H0( )= 0.8394 , y dibujar las regiones críticas y de aceptación bajo cada hipótesis.
Para simplificar la regla de decisión, se ha optado por utilizar como estadístico la suma de las dos observaciones: z = z1 + z2 . Para este caso particular, obtener:
b) La regla de decisión óptima de mínima probabilidad de error utilizando z , la suma de las dos observaciones, supuesto P H0( )= 0.8394 , y dibujar las regiones críticas y de aceptación bajo cada hipótesis. Obtenga una expresión que permita calcular la probabilidad media de error para la regla de decisión propuesta, expresando el resultado en función de Q x( ).
c) Dada la importancia del problema a resolver, se desea diseñar un detector que le dé más importancia a la probabilidad de detección correcta, manteniendo un nivel de falsa alarma razonable. Eligiendo la regla de decisión más adecuada, diseñe el detector en función del valor de probabilidad de falsa alarma, utilizando la información del estadístico planteado en el apartado b).
NOTA: Q x( )= 12π
e−
t 2
2
x
∞
∫ dt
Problema 30 Considere el sistema de comunicación digital de la figura, en el que la fuente genera un dígito binario cada T unidades de tiempo, y n(t) es un proceso de ruido blanco Gaussiano de media nula y densidad espectral de potencia No/2. Los dígitos 0 y 1 son equiprobables. La potencia disponible en el transmisor es P (energía por unidad de tiempo). Para construir las señales a transmitir se utiliza la representación vectorial de señales con vectores ortonormales. Se puede elegir entre las siguientes opciones:
1. Transmitir una de dos señales ortonormales cada T unidades de tiempo. 2. Transmitir una de cuatro señales ortonormales cada 2T unidades de tiempo (este
es el caso representado en la figura).
d) Encuentre una expresión integral para la probabilidad media de error en el primer caso.
e) Encuentre una expresión integral para la probabilidad media de error en el segundo caso.
r(t)
n(t)
Fuente 00 -> s0(t) 01 -> s1(t) 10 -> s2(t) 11 -> s3(t)
+
Receptor Decodificador
si(t)
Señal cada 2T unidades de tiempo

Problemas de Señales y Sistemas II
14/25
Problema 31
La variable aleatoria observada, r, bajo tres hipótesis distintas equiprobables, tiene una función de densidad de probabilidad Gaussiana:
3,2,1 ,2
)(exp2
1)|( 2
2
| =⎥⎦
⎤⎢⎣
⎡ −−= kmRHRf
k
k
kkHr k σσπ
Donde los valores de los parámetros para las tres hipótesis son:
αβ
β
α
α
σσσσσσ
σσ>>
⎪⎭
⎪⎬
⎫
====
== ,0
,0: ,:
,0:
333
222
111
mmH
mmHmH
f) Encuentre las regiones críticas y de aceptación de cada hipótesis, aplicando el criterio de Bayes de mínima probabilidad de error, y dibújelas para el caso particular en el que 22 2 αβ σσ = y m=ασ .
g) Calcule la probabilidad de error en el caso anterior.
Problema 32 En un ejercicio de tiro al blanco, se dispone de dos dianas. En nuestro problema, cada diana define una hipótesis estadística. El centro de cada diana está en las coordenadas xi, yi, zi. El punto de impacto del proyectil en la diana se modela como un vector aleatorio centrado en el centro de la diana y de varianza σ en cada una de las coordenadas. Las variables se consideran independientes.
En este problema, queremos observar el punto de impacto y decidir sobre la diana a la que apuntó el tirador.
a) Formule el problema como un test de hipótesis y calcule el cociente de funciones de verosimilitud.
b) Encuentre un estadístico suficiente para resolver el problema de detección. c) Encuentre una expresión para el cálculo de la probabilidad de falsa alarma, y para
la probabilidad de detección.
Problema 33
Se desea detectar si una maleta contiene droga (hipótesis H1) o no contiene droga (hipótesis H0 ) a partir de z, la observación de la proporción de determinado compuesto

Problemas de Señales y Sistemas II
15/25
químico en el aire. Siendo fZ (z | H0) y fZ (z | H1) las funciones de densidad de probabilidad de la observación bajo hipótesis H0 y H1, respectivamente, obtener:
⎪⎩
⎪⎨
⎧
≥≥>−
<⋅=
1001)1(
00)|( 0
zsizsiz
zsiaHzf Z
⎪⎩
⎪⎨
⎧
≥≥>⋅
<=
1001
00)|( 1
zsizsizb
zsiHzf Z
a. Los valores de a y b para que fZ (z | H0) y fZ (z | H1) y sean funciones de densidad de probabilidad.
b. Las probabilidades a priori de las hipótesis, sabiendo que si se decide a favor de la hipótesis H0 cuando z < 0.2 se minimiza la probabilidad de error media.
c. La probabilidad de detección del detector de Neyman-Pearson para una probabilidad de falsa alarma de 0.4.
Problema 34
La máquina de refrescos de una cafetería realiza medidas de peso, grosor y diámetro a las monedas introducidas, para poder distinguir si la moneda introducida es de 1 euro (7.5g de peso, 2.125mm de grosor y 23.75mm de diámetro) o de 2 euros (8.5g de peso, 1.95mm de grosor y 25.75mm de diámetro). El sistema de medida introduce un error que puede ser caracterizado como gaussiano independiente de media nula y desviación típica 0.25g para la medida del peso, 0.025mm para la medida de grosor y 0.25mm para la medida de diámetro. Suponiendo que en promedio se introduce el mismo número de monedas de euro que de dos euros, se pide: a) Diseñar la regla de decisión de mínima probabilidad de error, y determinar una
expresión integral que permita determinar dicho error. b) Si tuviera que optar por tomar la decisión con una sola medida, ¿qué medida
emplearía? Razone su respuesta. c) La lira turca, en su edición del 2005, es una moneda cuyo peso y grosor son
idénticos al de la moneda de 2 euros, y cuyo diámetro es de 26.15 mm. El aceptar como moneda de 2 euros a la lira turca (≈ 0.60 euros) supone una pérdida a la empresa de 1.4 euros ingresados, mientras que rechazar la moneda de dos euros supone una pérdida de 2 euros ingresados. Teniendo en cuenta que la proporción de liras turcas introducidas en las máquinas de refrescos es de una de cada 100, diseñar la regla de decisión que, empleando la medida de diámetro, permita minimizar la pérdida media en euros, y determinar el valor de la misma en función de Q(A).
NOTA: Q(A) =12π
e−
x 2
2 dxA
∞
∫
Tabla resumen de características: 1 euro 2 euros Lira turca
Peso (σ p = 0.25g) 7.5g 8.5g 8.5g Grosor (σ g = 0.025mm) 2.125mm 1.950mm 1.950mm Diámetro (σ d = 0.25mm) 23.75mm 25.75mm 26.15mm
Problemas de Señales y Sistemas II
16/25
Problema 35
Sea {bn} una secuencia de bits que se quiere transmitir por un canal AWGN (que introduce ruido blanco gaussiano y aditivo); a la salida del canal, se recibe la señal:
)()()( tvtxty +=
donde v(t) es el ruido introducido por el canal, con media nula y varianza 0.25. Se usa una modulación 4-QAM, con vectores de señal dados por los pares (a,b), donde a,b∈ {-2, +2}. Se desea utilizar el receptor óptimo basado en la representación vectorial de señales, y se usan las siguientes señales como funciones de base en el modulador:
⎟⎠⎞
⎜⎝⎛=
⎟⎠⎞
⎜⎝⎛=
Ttsen
TBtg
Ttsen
TAtg
2 1)(
1)(
2
1
π
π
h) ¿Cuál es el valor del mínimo intervalo de tiempo para la integración en el demodulador del receptor óptimo?
i) Calcule las constantes A y B para tener una base ortonormal, y caracterice estadísticamente a las variables aleatorias a las salidas de los integradores en el demodulador.
Problema 36
Se desea diagnosticar si un ciclista ha tomado EPO (hipótesis H1 ) o no (hipótesis H0 ) a partir de z , la observación del resultado de una prueba química del análisis de sangre. Bajo hipótesis H0 se considera que la observación z es una v.a. gaussiana de media 1 y varianza 1. Bajo hipótesis H1 se considera que z es una v.a. gaussiana de media 1 y varianza 2. Obtener:
Problemas de Señales y Sistemas II
17/25
a) La regla de decisión óptima de mínima probabilidad de error utilizando las dos observaciones, supuesto ( ) 0.47590 =HP , y dibujar las regiones críticas y de aceptación bajo cada hipótesis.
b) Una expresión que permita calcular la probabilidad media de error para la regla de decisión propuesta, expresando el resultado en función de ( )xQ .
c) La probabilidad de detección del detector de Neyman-Pearson para una probabilidad de falsa alarma de 0.4
NOTA: ( ) dt
t
e=xQx∫∞ −
221
2
π
Problema 37
El conjunto de señales consideradas en una modulación QAM es de la forma:
si (t) = Aic cos(2πft) + Ai
ssen(2πft)
Donde Aic y Ai
s son las amplitudes que definen cada elemento del conjunto de señales. Estas amplitudes se eligen atendiendo a requisitos de diseño. Suponga que las señales se observan contaminadas con ruido blanco aditivo y Gausiano, en el intervalo temporal 0<t<T, y que la energía de la señal transmitida ( si (t)) es E. Responda razonadamente a las siguientes cuestiones:
a) ¿Cuál es la relación óptima entre las amplitudes Aic y Ai
s en el caso binario?
b) ¿Cuál es la relación óptima entre las amplitudes Aic y Ai
s en el caso cuaternario?

Problemas de Señales y Sistemas II
18/25
TEORÍA DE LA ESTIMACIÓN Problema 38 Se dispone de N observaciones independientes de la variable aleatoria Z, normal de media cero y varianza 2σ .
a) Diseñe el estimador de la varianza utilizando el criterio de máxima verosimilitud. b) Calcule el sesgo del estimador. c) Se puede encontrar una cota para la varianza del estimador, si este es insesgado (cota de
Cramér-Rao):
( ) ( ){ }( )
12 2
2 2 2 2 222
ln ( | )ˆ ˆvar | f zE E σσ σ σ σ σσ
−⎧ ⎫⎡ ⎤∂⎪ ⎪⎢ ⎥= − ≥ −⎨ ⎬⎢ ⎥∂⎪ ⎪⎣ ⎦⎩ ⎭
Teniendo en cuenta la cota de Cramér-Rao, calcule ( )2ˆlim varN
σ→∞
Problema 39 En un problema de detección binario, las señales bajo cada hipótesis son gaussianas con varianza σ2. Se sabe que bajo la hipótesis nula la media es cero, mientras que bajo la hipótesis alternativa la media es una constante desconocida. Suponiendo que se dispone de N observaciones independientes:
a) Obtener las funciones de verosimilitud bajo cada hipótesis. b) Encontrar el estimador de máxima verosimilitud de la media desconocida bajo la
hipótesis alternativa. c) Si utiliza como valor de la media el resultado de la estimación del apartado b),
encuentre la razón de verosimilitud y la regla de decisión, suponiendo hipótesis equiprobables con el criterio de mínima probabilidad de error.
Problema 40 El tiempo de vida de un componente electrónico de una determinada serie puede modelarse como una variable aleatoria exponencial, que depende del parámetro λ:
( | ) ( )tf t e u tλλ λ −=
a) ¿Cuál es el valor del tiempo de vida medio condicionado al valor de λ? b) Si λ es un parámetro aleatorio uniformemente distribuido entre cero y la unidad,
obtenga f(t) y f(λ|t). c) Obtenga la expresión del estimador bayessiano de error cuadrático medio mínimo del
parámetro λ, utilizando una única medida del tiempo de vida. NOTA:
2
2 2 23
1 (1 )
1 (2 2 )
t t
t t
e d t e Ct
e d t t e Ct
λ λ
λ λ
λ λ λ
λ λ λ λ
− −
− −
= − + +
= − + + +
∫
∫

Problemas de Señales y Sistemas II
19/25
Problema 41 La distribución log-normal se usa para caracterizar la función densidad de probabilidad de, entre otras cosas, la sección radar (RCS) de objetos metálicos grandes con forma irregular, o del clutter marino. Esta función de densidad de probabilidad está dada por la siguientes expresión:
22
1 1( | , ) exp ln 0; 0; 022
zf z m z mmz
σ σσπ σ
⎡ ⎤⎛ ⎞= − > > >⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦
donde m es la mediana de la variable aleatoria Z, y σ es la desviación típica de ln(Z/m). a) Si se dispone de N observaciones independientes de la variable aleatoria Z, demuestre que el estimador de máxima verosimilitud del parámetro m vale:
1/
1
ˆNN
ii
m z=
⎛ ⎞= ⎜ ⎟⎝ ⎠∏
b) Si se dispone de N observaciones independientes de la variable aleatoria Z, encuentre el estimador de máxima verosimilitud del parámetro σ Problema 42 De una variable aleatoria X se conoce su función densidad de probabilidad a priori:
)1(5,0)1(5,0)( ++−= xxxf δδ
Se dispone de una observación de la variable aleatoria z=x+v, donde v es una muestra de ruido blanco gaussiano de media nula y varianza 2σ . Obtener:
a) f(z|x), f(z) y f(x|z). b) El estimador bayessiano óptimo con función de coste de error cuadrático medio, de la
variable aleatoria x, a partir de la observación z. Problema 43 Un proceso estacionario de tiempo discreto, Yn, está descrito por: y[n]=x[n]+w[n], donde x[n] es una muestra del proceso Xn, de media nula y varianza 2
xσ , mientras que w[n] es una muestra
de un proceso de ruido blanco, independiente de Xn, de media cero y varianza 2wσ . Se pretende
diseñar un predictor lineal de primer orden, para realizar una predicción de x[n] a partir de la muestra y[n-1]. El predictor se diseña para minimizar el error cuadrático medio.
a) Demostrar que el coeficiente del predictor es: [ ]
221
wx
xRa
σσ += .
b) ¿Cuál es el error cuadrático medio mínimo producido por el predictor?.

Problemas de Señales y Sistemas II
20/25
Problema 44 Una empresa de componentes electrónicos fabrica una determinada serie de resistores. El tiempo de vida de estos componentes en condiciones normales puede modelarse como una v.a. exponencial con f.d.p.:
( ) )(1| tuetftλ
λλ
−=
a) Calcular el valor del tiempo de vida medio. b) Encontrar la expresión del estimador de máxima verosimilitud del parámetro l, cuando se
conocen los tiempos de vida de “n” componentes de la serie. c) Comprobar si el estimador resultante es insesgado y/o consistente. Problema 45 Demostrar razonadamente la existencia o no del estimador de máxima verosimilitud del valor medio xη de un proceso de ruido blanco con f.d.p. laplaciana, cuando se utilizan N muestras en la estimación.
Utilice la siguiente función laplaciana: ( )xxxf η−−= exp21)(
Problema 46
Se trata de diseñar un predictor lineal de primer orden en tiempo discreto que, utilizando la muestra anterior de un proceso estacionario, gaussiano de media nula, dé como resultado una predicción de la muestra actual. Como criterio para el diseño del predictor se trata de minimizar el error cuadrático medio.
[ ] [ ]1ˆ 1 −= nxanx
a) Encontrar el valor de a1 que cumple los requisitos de diseño. b) Calcular la expresión de la varianza del error. c) Encuentre algún ejemplo en el que la varianza del error coincida con la del proceso
de entrada. Para ese caso, ¿qué tipo de codificación sería más ventajosa, PCM o PCM diferencial basada en el predictor diseñado?. Razone la respuesta.
Problema 47 Suponga que se quiere diseñar un estimador lineal de x[n] (proceso estocástico ergódico real de media μx y de varianza σx
2), utilizando como datos x[n-1] y x[n-2]:
[ ] [ ] [ ]21ˆ −+−= nbxnaxnx
a) Demuestre que el estimador lineal de error cuadrático medio mínimo es aquel con el que se cumple que el error de estimación es ortogonal a x[n-1] y x[n-2], y obtenga dicho estimador
b) Calcule el valor del error cuadrático medio mínimo.

Problemas de Señales y Sistemas II
21/25
c) Encontrar una relación entre los valores de la secuencia de autocorrelación del proceso que hagan que el estimador anterior sea insesgado. ¿Es una relación que pueda darse en la práctica?
Problema 48
Se dispone de N observaciones independientes de la variable aleatoria z, de tipo Rayleigh, con función de densidad de probabilidad:
)()( 2
2
2
2 zueazzf a
z−
=
a) Encontrar el valor de la media de la variable aleatoria z. b) A partir de las N observaciones independientes de z, encontrar el estimador de máxima
verosimilitud de la media de z.
NOTA: ∫∫−−−
+−= dzezedzeaz a
zaz
az
2
2
2
2
2
2
2222
2
Problema 49
Sea una variable aleatoria discreta de Bernoulli, con función de densidad de probabilidad:
⎩⎨⎧ =−
=−
caso otroen 01 ó 0 )1(
),(1 xpp
pxfxx
x
donde p es el parámetro a estimar. Si se dispone de una muestra de tamaño N, formada por realizaciones independientes de la variable aleatoria,
a) Encuentre la expresión de la función de verosimilitud, y el estimador de máxima verosimilitud del parámetro p.
b) Para esta variable aleatoria, puede demostrarse que E[x]=p, E[x2]=p, y que var[x]=p(1-p). Con estos datos, obtenga el sesgo del estimador obtenido en el apartado anterior, y su varianza.
c) Determine el número de muestras independientes necesario para estimar p, si se requiere que la varianza sea inferior a p/100. Comente la dependencia de este número de muestras con el valor del parámetro p.
Problema 50
Suponga que dispone de N realizaciones independientes de la variable aleatoria X, con función de densidad de probabilidad de tipo Poisson. La distribución de Poisson se usa para modelar el número de eventos dentro de un intervalo temporal, por lo que x es un número natural:
!)|(
xexf
xλλλ−
=

Problemas de Señales y Sistemas II
22/25
a) Encuentre el estimador de máxima verosimilitud del parámetro λ, demostrando expresamente que es el valor del parámetro que, dadas las observaciones, maximiza la función de verosimilitud.
b) Calcule el sesgo y la varianza del estimador de la media que ha obtenido. ¿De qué tipo de estimador se trata?
Problema 51
En una red de conmutación, el intervalo de tiempo entre paquetes se modela como una variable aleatoria Y∈R+ de tipo exponencial, dependiente de un parámetro θ∈R+, que modela la tasa de llegadas:
)( )|( yueyf yθθθ −= Del parámetro θ se tiene la siguiente información:
( ) )(e - θαθ αθ uf =
a) Encuentre el estimador Bayesiano de error cuadrático medio mínimo del parámetro θ, haciendo uso de una única observación. Comente la dependencia del resultado con el parámetro α (cuando este parámetro es de valor elevado o pequeño).
b) Suponiendo que dispone de N observaciones independientes de Y, encuentre el estimador de máxima verosimilitud de θ.
Problema 52
Sea { } 1n n
x ∞
= una secuencia de variables aleatorias con medias idénticas, [ ]iE x m= , y varianzas
también idénticas, [ ] 2var ix σ= . Llamamos 2 2is E x⎡ ⎤= ⎣ ⎦ . Se definen la media muestral y el
valor cuadrático medio muestral de la siguiente forma:
1
2 2
1
1ˆ
1ˆ
N
N ii
N
N ii
m xN
s xN
=
=
=
=
∑
∑
a) Suponiendo que las variables xi son variables aleatorias incorreladas, encuentre la media y la varianza de la media muestral. Demuestre, asimismo, que:
2ˆlim ( ) 0NNE m m
→∞⎡ ⎤− =⎣ ⎦
b) Suponga ahora que las variables aleatorias son además de incorreladas, gaussianas, con media nula. Encuentre la media y la varianza de 2ˆNs y demuestre que:
( )22 2ˆlim 0NNE s s
→∞
⎡ ⎤− =⎢ ⎥⎣ ⎦
c) Encuentre el estimador óptimo, siguiendo el criterio de máxima verosimilitud, de la varianza, utilizando N muestras independientes de la variable aleatoria gaussiana de media nula. ¿Cuáles son las propiedades de este estimador?
NOTA: Utilice, si lo estima oportuno, las siguientes propiedades:

Problemas de Señales y Sistemas II
23/25
Variables aleatorias gaussianas: 4 44! iE x σ⎡ ⎤ =⎣ ⎦
Variables aleatorias independientes: 2 2 2 2i j i jE x x E x E x⎡ ⎤ ⎡ ⎤ ⎡ ⎤=⎣ ⎦ ⎣ ⎦ ⎣ ⎦
Problema 53
Sea [ ] [ ] [ ]2
1 21
[ ] 1 2ii
x n a x n i a x n a x n=
= − = − + −∑ la predicción lineal de la muestra x[n] de
una señal aleatoria estacionaria, a partir de las dos muestras anteriores. Diseñar un programa en MATLAB que, con el vector de muestras [ ][1], [2],..., [100] tx x x=x , y haciendo uso de la función R=xcorr(x,’unbiased’), calcule los coeficientes de predicción lineal de modo que se minimice el valor cuadrático medio del error de predicción. Problema 54
Sea 1
N
ii
y x=
=∑ , donde las variables xi son v.a. Gaussianas independientes de media nula y
varianza 2xσ . Se desea diseñar un estimador del parámetro N, a partir de la observación de la
variable aleatoria y. Para los siguientes apartados, considere N como una variable real (no un número entero).
a) Encuentre el estimador de máxima verosimilitud de N, utilizando una sola observación. b) Encuentre el sesgo y la varianza de dicho estimador. Haga comentarios sobre la calidad
del estimador obtenido. c) Encuentre el estimador de máxima verosimilitud de N, utilizando M observaciones, así
como su sesgo.
NOTA: Si x es una variable aleatoria normal de media nula y varianza 2xσ , entonces
E[x4]=3 2 2( )xσ
Problema 55 Se dispone de N variables aleatorias independientes, normales de media A1 y varianza A2.
a) Encontrar de forma conjunta los estimadores de máxima verosimilitud de dichos parámetros.
b) ¿Cuál es el sesgo de dichos parámetros? c) Calcule la función de densidad de probabilidad del estimador del parámetro A1.
Dibuje de forma aproximada la función de densidad de probabilidad del estimador, para N=2 y N=10. ¿Qué conclusión puede extraer sobre la calidad de este estimador?

Problemas de Señales y Sistemas II
24/25
Problema 56
Considere N observaciones independientes de la variable aleatoria X, cuya función de densidad de probabilidad es de la familia exponencial:
[ ])()()()(exp)|( θθθ DxCxBAxfX ++=
a. Encuentre una ecuación diferencial, cuya solución permita obtener el estimador de máxima verosimilitud del parámetro, a partir de las N observaciones independientes de X.
b. Particularice el resultado para la estimación de la media de las variables aleatorias con las siguientes funciones de densidad de probabilidad:
⎟⎟⎠
⎞⎜⎜⎝
⎛ −−= 2
2
2)(exp
21)|(
σμ
πσμ xxfX )()exp()|( xuxxfX λλλ −⋅=
c. Obtenga, asimismo, el estimador de máxima verosimilitud de 2σ . d. Centrándose en el estimador de la media de la función gaussiana, discuta sobre
su calidad, en cuanto a sesgo y varianza.
Problema 57
Considere n variables aleatorias nivi ,...,2,1 ; = , independientes e idénticamente distribuidas (iid), de tipo Erlang, con función de densidad de probabilidad:
)()/exp()!1(
1)|( 1ii
NiNiv vuvv
Nvf
iλ
λλ −
−= −
donde N es un número entero positivo conocido, y λ es un parámetro determinista que se quiere estimar. La media μ y λ se relacionan como μ=Nλ, y la varianza es Nλ2. Atendiendo a esto, se pide:
a) Obtenga el estimador de máxima verosimilitud de λ, dados n valores de vi. b) Determine la media y la varianza de este estimador. ¿Es sesgado? ¿Es
consistente? c) Calcule la cota de Cramer-Rao del estimador, y determine si se trata de un
estimador insesgado de mínima varianza.
( )⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
⎥⎦⎤
⎢⎣⎡∂∂
≥2
)|(ln
1)ˆvar(λ
λ
λ
iv vfEi

Problemas de Señales y Sistemas II
25/25
Problema 58
Suponga que se dispone del conjunto de datos reales {x[n-M], …, x[n-1], x[n+1], …, x[n+M]} y que queremos estimar x[n] (problema de interpolación). Se supone que los datos y x[n] son muestras de un proceso real aleatorio estacionario en sentido amplio, de media nula. Para estimar x[n] se utiliza el siguiente estimador:
ˆ x n[ ]= ak x n − k[ ]k=−Mk≠0
M
∑
a) Encuentre el conjunto de ecuaciones que habría que resolver para encontrar los coeficientes de ponderación ak.
b) Demuestre que a-k=ak y explique por qué esto debe ser cierto.
![[spa] Siderurgia : Anuario estadístico 1988 [dan] Jern …aei.pitt.edu/70105/1/1988.pdf · SIDERURGIA Anuario estadístico JERN OG STÅL Statistisk årbog EISEN UND STAHL Statistisches](https://static.fdocument.org/doc/165x107/5ba3b74809d3f2c0278c00fb/spa-siderurgia-anuario-estadistico-1988-dan-jern-aeipittedu7010511988pdf.jpg)