Teorie di piastre - unicas.it
27
Teorie di piastre CPT FSDT Dipartimento di Meccanica, Strutture, Ambiente e Territorio Università di Cassino
Transcript of Teorie di piastre - unicas.it

Teorie di piastre
CPT
FSDT
Dipartimento di Meccanica, Strutture, Ambiente e TerritorioUniversità di Cassino

Notazioni,
,
,
, ,
, ,
, ,
x x
y y
z z
yz z y
xz z x
xy y x
uvw
v wu wu v
εεεγγγ
⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪=⎨ ⎬ ⎨ ⎬+⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪+⎪ ⎪ ⎪ ⎪
+⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭
x
y
z
yz
xz
xy
σσστττ
⎧ ⎫⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎨ ⎬⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎩ ⎭
Spostamentiuvw
⎧ ⎫⎪ ⎪⎨ ⎬⎪ ⎪⎩ ⎭
Deformazioni Tensioni
( )
( )
( )
( )
( )
( )
2 11
2 11
1 2 1
yz yzx x y z
y y x z xz xz
z z x y xy xy
EE
E E
E E
νγ τε σ ν σ σ
νε σ ν σ σ γ τ
νε σ ν σ σ γ τ
+=⎡ ⎤= − +⎣ ⎦
+⎡ ⎤= − + =⎣ ⎦
+⎡ ⎤= − + =⎣ ⎦
Legame costitutivo

Teoria classica
Ipotesi sulla deformazione e sulla tensione:
Ipotesi sulla tensione: la tensione normale in direzione dello spessore della piastra è trascurabile.
1. 0
2. 00
z
z
yz xz
σ
εγ γ
=
== =
Ipotesi sulle deformazioni: la dilatazione lineare in direzione dello spessore della piastra è trascurabile, gli scorrimenti angolari tra il piano della piastra e la fibra ortogonale a tale piano sono trascurabili. (la fibra ortogonale al piano medio della piastra risulta ortogonale alla superficie media della piastra a deformazione avvenuta).

1. Trascurabilità della tensione normale nello spessore, i.e. :0zσ =
( )
( )
( )
2 11
2 11
1 2 1
yz yzx x y
y y x xz xz
z x y xy xy
EE
E E
E E
νγ τε σ νσ
νε σ νσ γ τ
νε ν σ σ γ τ
+=⎡ ⎤= −⎣ ⎦
+⎡ ⎤= − =⎣ ⎦
+⎡ ⎤= − + =⎣ ⎦
Invertendo la relazione di legame costitutivo si ottiene:
( )
( )
( )
2 2
2 2
2 1
1 12 1
1 12 1
yz yz
x x y
xz xz
y x y
xy xy
E
E EE
E EE
τ γννσ ε ε
ν ν τ γν νσ ε εν ν
τ γν
=+
= +− − =
+= +
− −=
+

2. Ipotesi cinematiche: trascurabilità della dilatazione lineare in direzione dello spessore della piastra e degli scorrimenti angolari.
che integrata nello spessore fornisce:
che integrate nello spessore forniscono:
Spostamenti:
Ipotesi sulla dilatazione lineare,0 0z zwε = ⇒ =
( , )w w x y=
Ipotesi sugli scorrimenti angolari, ,
, ,
0 0
0 0yz z y
xz z x
v w
u w
γ
γ
= ⇒ + =
= ⇒ + =
,
,
o x
o y
u u zwv v zw= −
= −
,
,
( , ) ( , )( , ) ( , )
( , )
o x
o y
u u x y z w x yv v x y z w x y
w w x y
= −
= −
=

,
,
x x x x xxo
y y y y yyo
xy xy xy xy xy
e ewu
e z ewv
e e
ε χ χε χ χγ χ χ
⎧ ⎫ ⎧ ⎫ ⎧ ⎫ ⎧ ⎫ ⎧ ⎫−⎧ ⎫⎧ ⎫⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪= + = =⎨ ⎬ ⎨ ⎬ ⎨ ⎬ ⎨ ⎬ ⎨ ⎬ ⎨ ⎬ ⎨ ⎬−⎩ ⎭ ⎩ ⎭⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪
⎩ ⎭ ⎩ ⎭ ⎩ ⎭ ⎩ ⎭ ⎩ ⎭
S S
,
,
, ,
00
x
y
y x
⎡ ⎤•⎢ ⎥= •⎢ ⎥⎢ ⎥• •⎣ ⎦
S
,
,
xo
yo
wu uz
wv vw w
−⎧ ⎫⎧ ⎫ ⎧ ⎫+⎪ ⎪ ⎪ ⎪ ⎨ ⎬−=⎨ ⎬ ⎨ ⎬ ⎩ ⎭
⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭
Spostamenti
Deformazioni
2 2
2 2
01 1
01 1
0 0
x x
y x
xy xy
E E
E E
G
νν νσ ε
νσ εν ν
τ γ
⎡ ⎤⎢ ⎥− −⎧ ⎫ ⎧ ⎫ ⎢ ⎥
⎪ ⎪ ⎪ ⎪ ⎢ ⎥= =⎨ ⎬ ⎨ ⎬ ⎢ ⎥− −⎪ ⎪ ⎪ ⎪ ⎢ ⎥⎩ ⎭ ⎩ ⎭⎢ ⎥⎢ ⎥⎣ ⎦
D DTensioni
/ 2 / 2
/ 2 / 2
x xh h
y yh h
xy xy
N MN dz M z dzN M
− −
⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪= = = =⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭
∫ ∫N σ M σRisultanti

/ 2 / 2 / 2
/ 2 / 2 / 2
/ 2 / 2
/ 2 / 2
x x x xh h h
y y y yh h h
xy xy xy xy
x x xh h m
y y yh h
xy xy xy
m
N eN dz dz e z dzN e
e edz e z dz e
e e
ε χε χγ χ
χχχ
− − −
− −
⎛ ⎞⎧ ⎫ ⎧ ⎫ ⎧ ⎫ ⎧ ⎫⎜ ⎟⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪= = = = +⎨ ⎬ ⎨ ⎬ ⎨ ⎬ ⎨ ⎬⎜ ⎟
⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎜ ⎟⎩ ⎭ ⎩ ⎭ ⎩ ⎭ ⎩ ⎭⎝ ⎠
⎧ ⎫ ⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪ ⎪ ⎪= + =⎨ ⎬ ⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭ ⎩ ⎭
=
∫ ∫ ∫
∫ ∫
N σ D D
D D D
D/ 2
/ 2
h
hdz h
−=∫ D D
Legame risultante
/ 2 / 2 / 2
/ 2 / 2 / 2
/ 2 / 2 2
/ 2 / 2
x x x xh h h
y x y yh h h
xy xy xy xy
x x xh h f
y y yh h
xy xy xy
M eM z dz z dz z e z dzM e
ez dz e z dz
e
ε χε χγ χ
χ χχ χχ χ
− − −
− −
⎛ ⎞⎧ ⎫ ⎧ ⎫ ⎧ ⎫ ⎧ ⎫⎜ ⎟⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪= = = = +⎨ ⎬ ⎨ ⎬ ⎨ ⎬ ⎨ ⎬⎜ ⎟
⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎜ ⎟⎩ ⎭ ⎩ ⎭ ⎩ ⎭ ⎩ ⎭⎝ ⎠
⎧ ⎫ ⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪ ⎪ ⎪= + =⎨ ⎬ ⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭ ⎩
∫ ∫ ∫
∫ ∫
M σ D D
D D D
3/ 2 2
/ 2 12hf
h
hz dz−
⎪⎭
= =∫D D D

In esplicito
( ) ( ) ( )
, ,2 2 2 2
, ,2 2 2 2
, ,
1 1 1 1
1 1 1 1
2 1 2 1
x x y o x o y
y x y o x o y
xy xy o y o x
E h E h E h E hN e e u v
E h E h E h E hN e e u v
E h E hN e u v
ν νν ν ν ν
ν νν ν ν ν
ν ν
= + = +− − − −
= + = +− − − −
= = ++ +
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( )
3 3 3 3
, ,2 2 2 2
3 3 3 3
, ,2 2 2 2
3 3
,
12 1 12 1 12 1 12 1
12 1 12 1 12 1 12 1
12 2 1 12 1
x x y xx yy
y x y xx yy
xy xy xy
E h E h E h E hM w w
E h E h E h E hM w w
Eh EhM w
ν νχ χν ν ν ν
ν νχ χν ν ν ν
χν ν
= + = − −− − − −
= + = − −− − − −
= = −⋅ + +

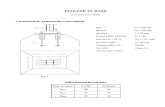
Equilibrio alla traslazione lungo x e y.
x
Nx Nx+∆Nx
Ny+∆Ny
Nxy
Nxy+∆Nxy
Nxy+∆Nxy
NyNxy
∆y∆x
( ) ( )( ) ( )
0
0
x x x xy xy xy x
y y y xy xy xy y
N N N y N N N x f x y
N N N x N N N y f x y
+ ∆ − ∆ + + ∆ − ∆ + ∆ ∆ =
+ ∆ − ∆ + + ∆ − ∆ + ∆ ∆ =
0
0
xyxx
xy yy
NN fx y
N Nf
x y
∆∆+ + =
∆ ∆∆ ∆
+ + =∆ ∆
nel limite per ∆x e ∆y che tendono a zero
Semplificando e dividendo per ∆x∆y
0
0
xyxx
xy yy
NN fx y
N Nf
x y
∂∂+ + =
∂ ∂∂ ∂
+ + =∂ ∂y
x
QxQx+∆Qx
Qy+∆Qy
Qy
∆y∆x
y
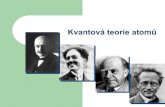
Equilibrio alla traslazione lungo z.
( ) ( ) 0
0
x x x y y y
yx
Q Q Q y Q Q Q x q x y
QQ qx y
+ ∆ − ∆ + + ∆ − ∆ + ∆ ∆ =
⇓∂∂
+ + =∂ ∂

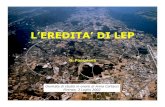
Equilibrio alla rotazione intorno a y e x.
( ) ( ) ( )
( ) ( ) ( )
2
2
02
02
x x x xy xy xy x x
y y y xy xy xy y y
x yM M M y M M M x Q Q x y q
x yM M M x M M M y Q Q x y q
∆ ∆+ ∆ − ∆ + + ∆ − ∆ − + ∆ ∆ ∆ − =
∆ ∆+ ∆ − ∆ + + ∆ − ∆ − + ∆ ∆ ∆ − =
Semplificando, dividendo per ∆x∆y, eseguendo il limite si ottiene:
0
0
xyxx
xy yy
MM Qx y
M MQ
x y
∂∂+ − =
∂ ∂∂ ∂
+ − =∂ ∂
Mxy
x
Mx
Mx+∆Mx
My
My+∆My
Mxy
Mxy+∆Mxy
Mxy+∆Mxy∆y∆x
y
Qx
Qx+∆Qx
Qy+∆Qy
Qy

In definitiva le equazioni di equilibrio sono:
0
0
0
0
0
xyxx
xy yy
yx
xyxx
xy yy
NN fx y
N Nf
x yQQ q
x yMM Q
x yM M
Qx y
∂∂+ + =
∂ ∂∂ ∂
+ + =∂ ∂
∂∂+ + =
∂ ∂∂∂
+ − =∂ ∂∂ ∂
+ − =∂ ∂
2 22
2 2
0
0
2 0
xyxx
xy yy
xy yx
NN fx y
N Nf
x yM MM q
x x y y
∂∂+ + =
∂ ∂∂ ∂
+ + =∂ ∂
∂ ∂∂+ + + =
∂ ∂ ∂ ∂

Le equazioni di equilibrio in termini di spostamenti sono:
( ) ( )
( ) ( )
, , , ,2 2
, , , ,2 2
3
, , , , ,2 2 2 2
01 1 2 1
02 1 1 1
1 2 112 1 1 1 1 1
o xx o xy o yy o xy x
o xy o xx o xy o yy y
xxxx xxyy xxyy xxyy yyyy
E h E h E hu v u v f
E h E h E hu v u v f
E h w w w w w q
νν ν ν
νν ν ν
ν νν ν ν ν ν
+ + + + =− − +
+ + + + =+ − −
⎡ ⎤+ + + + =⎢ ⎥− − + − −⎣ ⎦
in particolare l’ultima diventa:
( )3
, , , 22
12 1xxxx yyyy xxyyq E hw w w DD ν
+ + = =−
ovveroqwD
∆∆ =

Calcolo delle risultanti rispetto ad una direzione generica
Nx
Nn
Nxy
NxyNnm
y
Ny
x
( )( )
( ) ( )( ) ( )
xyxx y
xy y
n nn nm
n x yn
n x y
n n
n x yn x yn x y
x y n x ynm x y
n x x xy y x xy x y y y
nm x y xy x x xy y y x
NNN N
N N
l y xy xl l
N n nn n
N n n
N N n N n n N n N n n
N N n N n n N n N n n
⊥
⊥ ⊥
⎧ ⎫⎧ ⎫⎪ ⎪ ⎪ ⎪= =⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭
= • = •
∆ − ∆ − ∆ =
∆ ∆− − =
∆ ∆
= • = + •= +
= • = + •
= + + +
= − + + − +
N N
N n N n
N N N 0
N N N 0
N n N N nN N N
N n N N n
y
nn┴
x y
y x
n nn n
⊥−⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪= =⎨ ⎬ ⎨ ⎬
⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭n n

Mx Mn
My
MxyMnm
y
Mxy
n
( )( )
( ) ( )( ) ( )
xyxx y
xy y
n nn nm
n x yn
n x y
n n
n x yn x yn x y
x y n x ynm x y
n x x xy y x xy x y y y
nm x y xy x x xy y y x
MMM M
M M
l y xy xl l
M n nn n
M n n
M M n M n n M n M n n
M M n M n n M n M n n
⊥
⊥ ⊥
⎧ ⎫⎧ ⎫⎪ ⎪ ⎪ ⎪= =⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭
= • = •
∆ − ∆ − ∆ =
∆ ∆− − =
∆ ∆
= • = + •= +
= • = + •
= + + +
= − + + − +
M M
M n M n
M M M 0
M M M 0
M n M M nM M M
M n M M n
y
x
1 0 n xx y
nm xy
M Mn n
M M=
= ==
0 1 n yx y
nm xy
M Mn n
M M=
= == −

I parametri cinematici indipendenti sul contorno sono:
w inflessione
w,n rotazione normale
Infatti, la rotazione tangente w,n risulta nota una volta assegnato lo spostamento w sul tratto di contorno.
Analogamente, si dimostra che possono essere assegnate solo due condizioni al contorno di tipo statico. Tali caratteristiche della sollecitazione devono essere duali, nel senso del lavoro virtuale, all’inflessione ed alla rotazione normale.
Il lavoro virtuale delle caratteristiche della sollecitazione lungo un tratto del contorno vale:
( ) ( ), , , ,n n n nm m n n n nm mc c c c
L M w dm Q w M w dm M w dm Q M w dm= − + + = − + −∫ ∫ ∫ ∫per cui le caratteristiche della sollecitazione da assegnare sul contorno sono:
Qn-Mnm,m taglio di Kirchhoff
Mn momento flettente normale

Teoria di Reissner-Mindlin
Ipotesi sulla deformazione e sulla tensione:
2 1
1. 0
2. 0
z
z
yz xz
σ
εγ γ γ γ
=
== =
Ipotesi sulla tensione: la tensione normale in direzione dello spessore della piastra è trascurabile.
Ipotesi sulle deformazioni: la dilatazione lineare in direzione dello spessore della piastra è trascurabile, gli scorrimenti angolari tra il piano della piastra e la fibra ortogonale a tale piano sono costanti. (la fibra ortogonale al piano medio della piastra risulta rettilinea ma non necessariamente ortogonale alla superficie media della piastra a deformazione avvenuta).

1. Trascurabilità della tensione normale nello spessore, i.e. :0zσ =
( )
( )
( )
2 11
2 11
1 2 1
yz yzx x y
y y x xz xz
z x y xy xy
EE
E E
E E
νγ τε σ νσ
νε σ νσ γ τ
νε ν σ σ γ τ
+=⎡ ⎤= −⎣ ⎦
+⎡ ⎤= − =⎣ ⎦
+⎡ ⎤= − + =⎣ ⎦
Invertendo la relazione di legame costitutivo si ottiene:
( )
( )
( )
2 2
2 2
2 1
1 12 1
1 12 1
yz yz
x x y
xz xz
y x y
xy xy
E
E EE
E EE
τ γννσ ε ε
ν ν τ γν νσ ε εν ν
τ γν
=+
= +− − =
+= +
− −=
+

2. Ipotesi cinematiche: trascurabilità della dilatazione lineare in direzione dello spessore della piastra e degli scorrimenti angolari.
che integrata nello spessore fornisce:
che integrate nello spessore forniscono:
Spostamenti:
Ipotesi sulla dilatazione lineare,0 0z zwε = ⇒ =
( , )w w x y=
Ipotesi sugli scorrimenti angolari2 , , 2
1 , , 1
yz z y
xz z x
v w
u w
γ γ γ
γ γ γ
= ⇒ + =
= ⇒ + =
1 ,
2 ,
o x x x
o y y y
u u z wv v z w
ϕ ϕ γ
ϕ ϕ γ
= + = −
= + = −
( , ) ( , )( , ) ( , )
( , )
o x
o y
u u x y z x yv v x y z x y
w w x y
ϕϕ
= +
= +
=

x x x x xxo
y y y y yyo
xy xy xy xy xy
e eu
e z ev
e e
ε χ χϕ
ε χ χϕ
γ χ χ
⎧ ⎫ ⎧ ⎫ ⎧ ⎫ ⎧ ⎫ ⎧ ⎫⎧ ⎫⎧ ⎫⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪= + = =⎨ ⎬ ⎨ ⎬ ⎨ ⎬ ⎨ ⎬ ⎨ ⎬ ⎨ ⎬ ⎨ ⎬
⎩ ⎭ ⎩ ⎭⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭ ⎩ ⎭ ⎩ ⎭ ⎩ ⎭
S S
,
,
, ,
00
x
y
y x
⎡ ⎤•⎢ ⎥= •⎢ ⎥⎢ ⎥• •⎣ ⎦
S
xo
yo
u uz
v vw w
ϕϕ⎧ ⎫⎧ ⎫ ⎧ ⎫
+⎪ ⎪ ⎪ ⎪ ⎨ ⎬=⎨ ⎬ ⎨ ⎬ ⎩ ⎭⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭
Spostamenti
Deformazioni
,
,
xz x x
yz y y
ww
γ ϕγ ϕ
+⎧ ⎫ ⎧ ⎫=⎨ ⎬ ⎨ ⎬+⎩ ⎭ ⎩ ⎭

2 2
2 2
01 1
01 1
0 0
x x
y x
xy xy
E E
E E
G
νν νσ ε
νσ εν ν
τ γ
⎡ ⎤⎢ ⎥− −⎧ ⎫ ⎧ ⎫ ⎢ ⎥
⎪ ⎪ ⎪ ⎪ ⎢ ⎥= =⎨ ⎬ ⎨ ⎬ ⎢ ⎥− −⎪ ⎪ ⎪ ⎪ ⎢ ⎥⎩ ⎭ ⎩ ⎭⎢ ⎥⎢ ⎥⎣ ⎦
D D
( )
Tensioni
1 00 12 1
xz xz
yz yz
Eτ γτ γ ν⎧ ⎫ ⎧ ⎫ ⎡ ⎤
= =⎨ ⎬ ⎨ ⎬ ⎢ ⎥+ ⎣ ⎦⎩ ⎭ ⎩ ⎭G G
/ 2 / 2
/ 2 / 2
x xh h
y yh h
xy xy
N MN dz M z dzN M
− −
⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪= = = =⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭
∫ ∫N σ M σRisultanti
/ 2
/ 2
hx
hy
Qdz
Qµ
−
⎧ ⎫= =⎨ ⎬⎩ ⎭
∫Q τ

Legame risultante
/ 2 / 2 / 2
/ 2 / 2 / 2
/ 2 / 2
/ 2 / 2
x x x xh h h
y x y yh h h
xy xy xy xy
x x xh h m
y y yh h
xy xy xy
m
N eN dz dz e z dzN e
e edz e z dz e
e e
ε χε χγ χ
χχχ
− − −
− −
⎛ ⎞⎧ ⎫ ⎧ ⎫ ⎧ ⎫ ⎧ ⎫⎜ ⎟⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪= = = = +⎨ ⎬ ⎨ ⎬ ⎨ ⎬ ⎨ ⎬⎜ ⎟
⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎜ ⎟⎩ ⎭ ⎩ ⎭ ⎩ ⎭ ⎩ ⎭⎝ ⎠
⎧ ⎫ ⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪ ⎪ ⎪= + =⎨ ⎬ ⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭ ⎩ ⎭
=
∫ ∫ ∫
∫ ∫
N σ D D
D D D
D/ 2
/ 2
h
hdz h
−=∫ D D
/ 2 / 2 / 2
/ 2 / 2 / 2
/ 2 / 2 2
/ 2 / 2
x x x xh h h
y x y yh h h
xy xy xy xy
x x xh h f
y y yh h
xy xy xy
M eM z dz z dz z e z dzM e
ez dz e z dz
e
ε χε χγ χ
χ χχ χχ χ
− − −
− −
⎛ ⎞⎧ ⎫ ⎧ ⎫ ⎧ ⎫ ⎧ ⎫⎜ ⎟⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪= = = = +⎨ ⎬ ⎨ ⎬ ⎨ ⎬ ⎨ ⎬⎜ ⎟
⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎜ ⎟⎩ ⎭ ⎩ ⎭ ⎩ ⎭ ⎩ ⎭⎝ ⎠
⎧ ⎫ ⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪ ⎪ ⎪= + =⎨ ⎬ ⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭ ⎩
∫ ∫ ∫
∫ ∫
M σ D D
D D D
3/ 2 2
/ 2 12hf
h
hz dz−
⎪⎭
= =∫D D D

In esplicito
( ) ( ) ( )
, ,2 2 2 2
, ,2 2 2 2
, ,
1 1 1 1
1 1 1 1
2 1 2 1
x x y o x o y
y x y o x o y
xy xy o y o x
E h E h E h E hN e e u v
E h E h E h E hN e e u v
E h E hN e u v
ν νν ν ν ν
ν νν ν ν ν
ν ν
= + = +− − − −
= + = +− − − −
= = ++ +
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( )
3 3 3 3
, ,2 2 2 2
3 3 3 3
, ,2 2 2 2
3 3
, ,
12 1 12 1 12 1 12 1
12 1 12 1 12 1 12 1
12 2 1 12 2 1
x x y x x y y
y x y x x y y
xy xy x y y x
E h E h E h E hM
E h E h E h E hM
Eh EhM
ν νχ χ ϕ ϕν ν ν ν
ν νχ χ ϕ ϕν ν ν ν
χ ϕ ϕν ν
= + = +− − − −
= + = +− − − −
= = +⋅ + ⋅ +

/ 2 / 2
/ 2 / 2
/ 2
/ 2
h hx xz
h hy yz
hS
h
Qdz dz
Q
dz h
γµ µ
γ
µ µ
− −
−
⎧ ⎫ ⎧ ⎫= = =⎨ ⎬ ⎨ ⎬⎩ ⎭ ⎩ ⎭
= =
∫ ∫
∫
Q τ G
D G G
( ) ( )
( ) ( )
,
,
2 1
2 1
x x x
y y y
E hQ w
E hQ w
µ ϕν
µ ϕν
= ++
= ++

Equilibrio alla traslazione lungo x e y.
x
Nx Nx+∆Nx
Ny+∆Ny
Nxy
Nxy+∆Nxy
Nxy+∆Nxy
NyNxy
∆y∆x
( ) ( )( ) ( )
0
0
x x x xy xy xy x
y y y xy xy xy y
N N N y N N N x f x y
N N N x N N N y f x y
+ ∆ − ∆ + + ∆ − ∆ + ∆ ∆ =
+ ∆ − ∆ + + ∆ − ∆ + ∆ ∆ =
0
0
xyxx
xy yy
NN fx y
N Nf
x y
∆∆+ + =
∆ ∆∆ ∆
+ + =∆ ∆
nel limite per ∆x e ∆y che tendono a zero
Semplificando e dividendo per ∆x∆y
0
0
xyxx
xy yy
NN fx y
N Nf
x y
∂∂+ + =
∂ ∂∂ ∂
+ + =∂ ∂y
x
QxQx+∆Qx
Qy+∆Qy
Qy
∆y∆x
y
Equilibrio alla traslazione lungo z.
( ) ( ) 0
0
x x x y y y
yx
Q Q Q y Q Q Q x q x y
QQ qx y
+ ∆ − ∆ + + ∆ − ∆ + ∆ ∆ =
⇓∂∂
+ + =∂ ∂

Equilibrio alla rotazione intorno a y e x.
( ) ( ) ( )
( ) ( ) ( )
2
2
02
02
x x x xy xy xy x x
y y y xy xy xy y y
x yM M M y M M M x Q Q x y q
x yM M M x M M M y Q Q x y q
∆ ∆+ ∆ − ∆ + + ∆ − ∆ − + ∆ ∆ ∆ − =
∆ ∆+ ∆ − ∆ + + ∆ − ∆ − + ∆ ∆ ∆ − =
Semplificando, dividendo per ∆x∆y, eseguendo il limite si ottiene:
0
0
xyxx
xy yy
MM Qx y
M MQ
x y
∂∂+ − =
∂ ∂∂ ∂
+ − =∂ ∂
Mxy
x
Mx
Mx+∆Mx
My
My+∆My
Mxy
Mxy+∆Mxy
Mxy+∆Mxy∆y∆x
y
Qx
Qx+∆Qx
Qy+∆Qy
Qy

In definitiva le equazioni di equilibrio sono:
0
0
0
0
0
xyxx
xy yy
yx
xyxx
xy yy
NN fx y
N Nf
x yQQ q
x yMM Q
x yM M
Qx y
∂∂+ + =
∂ ∂∂ ∂
+ + =∂ ∂
∂∂+ + =
∂ ∂∂∂
+ − =∂ ∂∂ ∂
+ − =∂ ∂

I parametri cinematici indipendenti sul contorno sono:
w inflessione
ϕn rotazione intorno a m
ϕm rotazione intorno a n
Analogamente, si dimostra che possono essere assegnate tre condizioni al contorno di tipo statico. Tali caratteristiche della sollecitazione devono essere duali, nel senso del lavoro virtuale, all’inflessione, alla rotazione intorno a m e a quella intorno a n.
Il lavoro virtuale delle caratteristiche della sollecitazione lungo un tratto del contorno vale:
???nc
L M dm= ∫per cui le caratteristiche della sollecitazione da assegnare sul contorno sono:
Qn taglio
Mn momento flettente normale
Mm momento flettente normale