Proiect Trim
19
PROIECT GEODEZIE PROIECT GEODEZIE
Transcript of Proiect Trim

PROIECT GEODEZIEPROIECT GEODEZIE
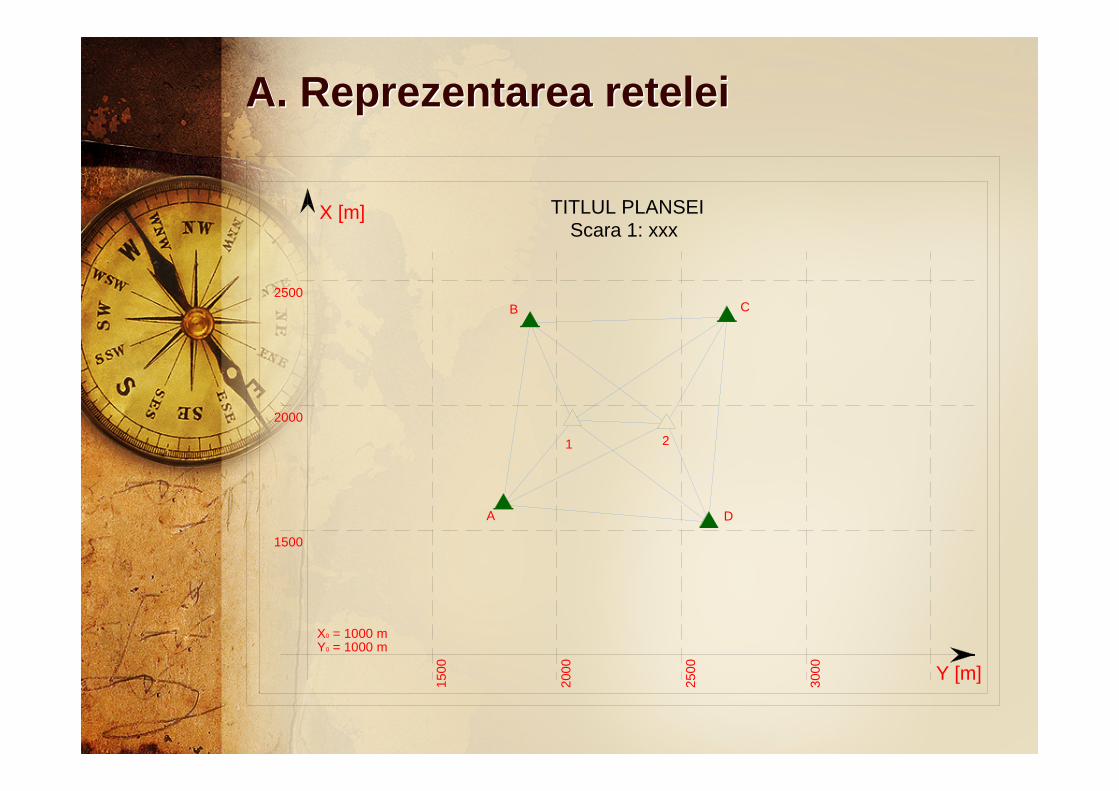
A. Reprezentarea reteleiA. Reprezentarea retelei
A D
21
B C
X0 = 1000 mY0 = 1000 m
Y [m]
X [m] TITLUL PLANSEIScara 1: xxx
1500
2000
2500
3000
1500
2000
2500
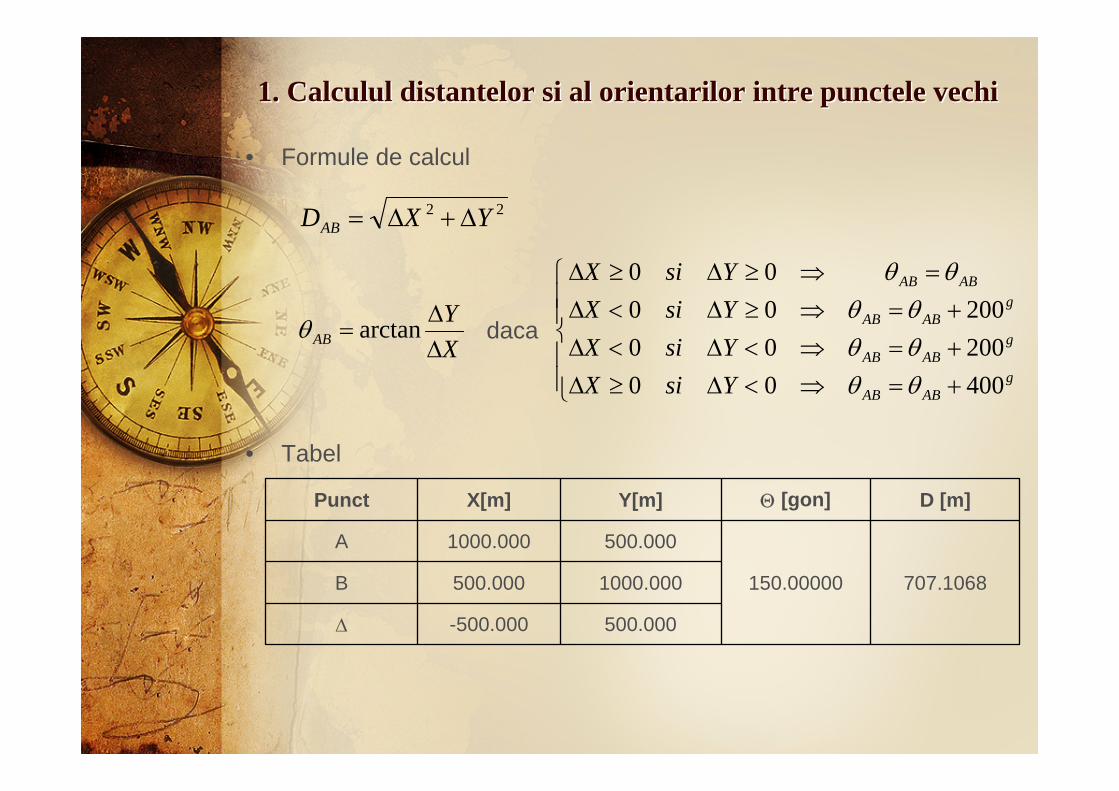
1. Calculul distantelor si al orientarilor intre punctele vechi1. Calculul distantelor si al orientarilor intre punctele vechi
• Formule de calcul
22 YXDAB ∆+∆=
• Tabel
XY
AB ∆∆
= arctanθ
500.000-500.000∆
1000.000500.000B 707.1068150.00000
500.0001000.000A
D [m]Θ [gon]Y[m]X[m]Punct
daca
⎪⎪⎩
⎪⎪⎨
⎧
+=⇒<∆≥∆+=⇒<∆<∆+=⇒≥∆<∆
=⇒≥∆≥∆
gABAB
gABAB
gABAB
ABAB
YsiXYsiXYsiXYsiX
400002000020000
00
θθθθθθ
θθ
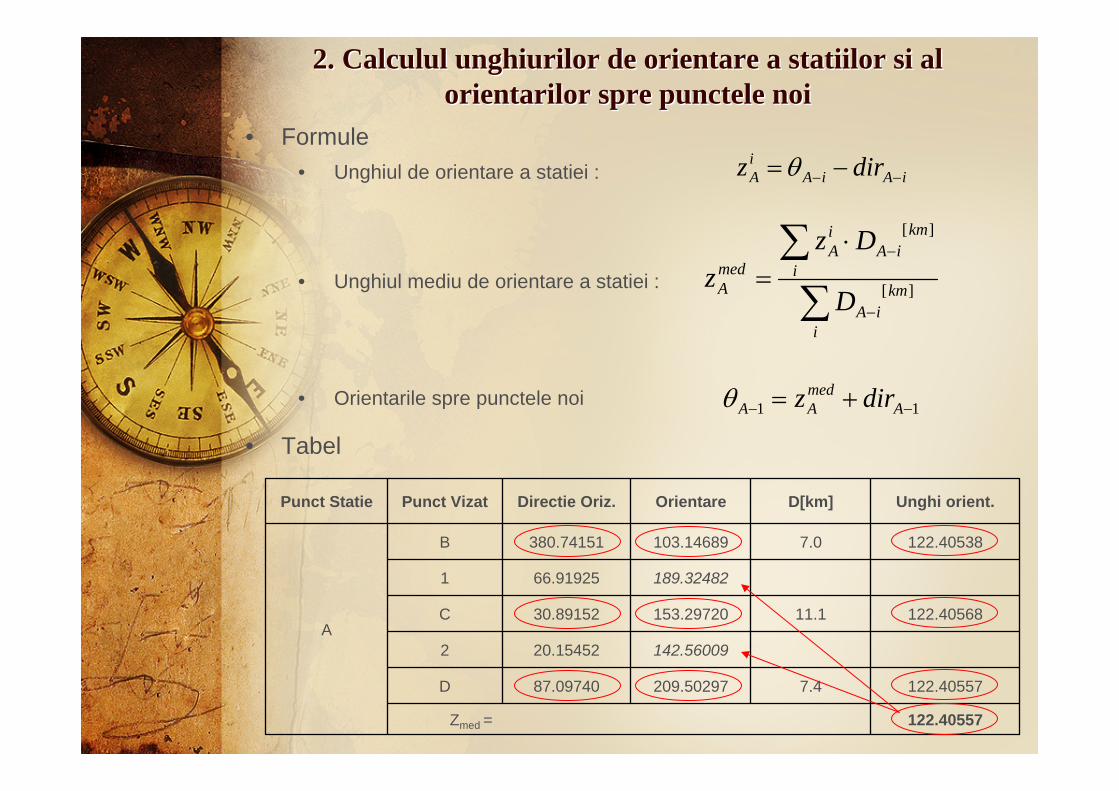
2. Calculul unghiurilor de orientare a statiilor si al orientarilor spre punctele noi
2. Calculul unghiurilor de orientare a statiilor si al orientarilor spre punctele noi
∑∑
−
−⋅=
i
kmiA
i
kmiA
iA
medA D
Dzz ][
][
11 −− += AmedAA dirzθ
iAiAiA dirz −− −=θ
• Tabel
• Formule
122.40557Zmed =
122.405577.4209.5029787.09740D
142.5600920.154522
122.4056811.1153.2972030.89152C
189.3248266.919251
122.405387.0103.14689380.74151B
A
Unghi orient.D[km]OrientareDirectie Oriz.Punct VizatPunct Statie
• Unghiul de orientare a statiei :
• Unghiul mediu de orientare a statiei :
• Orientarile spre punctele noi
⎩⎨⎧
⋅−+=⋅−+=
−⋅−⋅+−
=
−
−
−−
−−
111
111
11
111
tan)(tan)(
tantantantan
BBB
AAA
AB
AABBBA
XXYYXXYY
XXYYX
θθ
θθθθ
• Tabel
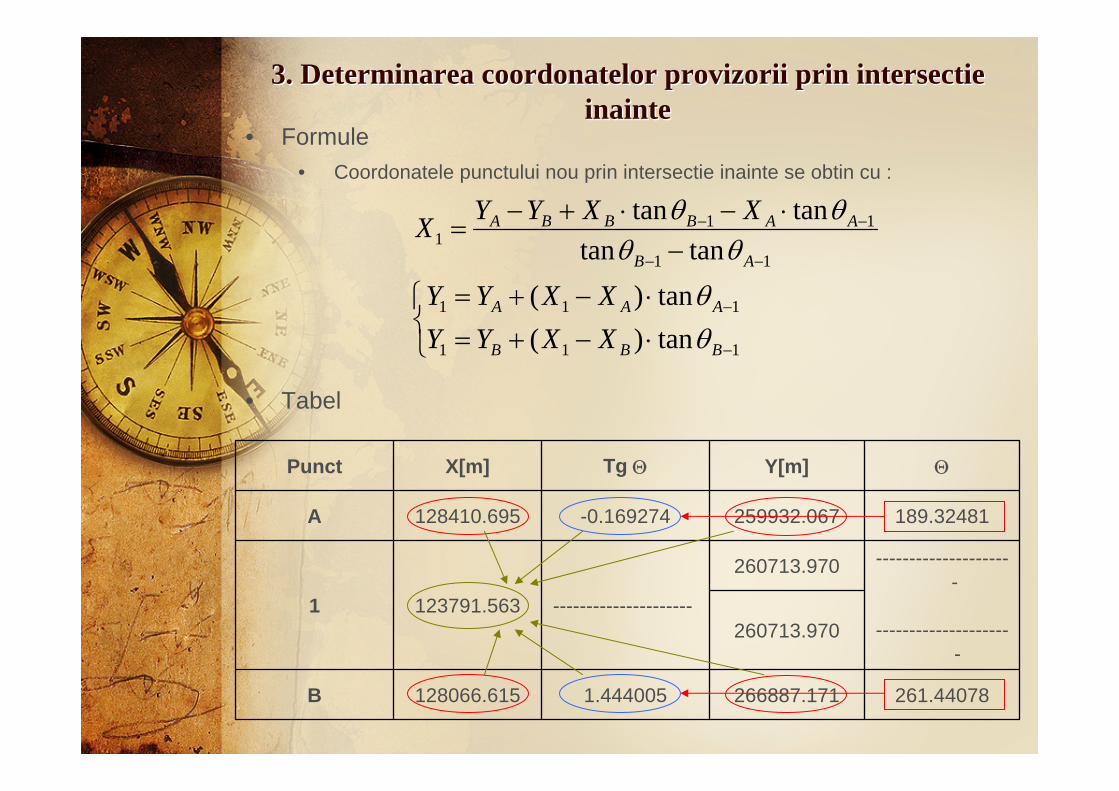
• Formule• Coordonatele punctului nou prin intersectie inainte se obtin cu :
3. Determinarea coordonatelor provizorii prin intersectie inainte
3. Determinarea coordonatelor provizorii prin intersectie inainte
261.44078266887.1711.444005128066.615B
260713.970
---------------------
---------------------
260713.970
---------------------123791.5631
189.32481259932.067-0.169274128410.695A
ΘY[m]Tg ΘX[m]Punct
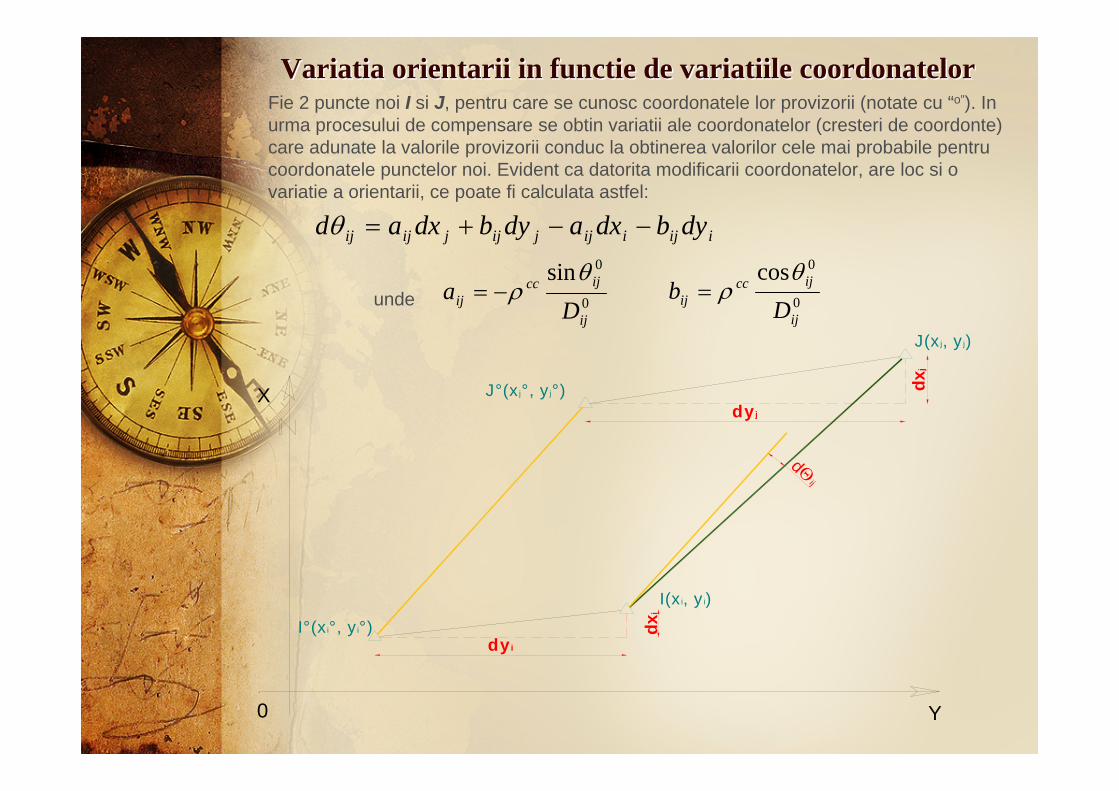
Variatia orientarii in functie de variatiile coordonatelorVariatia orientarii in functie de variatiile coordonatelor
X
Y
J°(xj°, yj°)
I°(xi°, yi°)
J(xj, y j)
I(xi, yi)
dxi
dyi
dxj
dyj
0
dΘij
Fie 2 puncte noi I si J, pentru care se cunosc coordonatele lor provizorii (notate cu “o”). In urma procesului de compensare se obtin variatii ale coordonatelor (cresteri de coordonte) care adunate la valorile provizorii conduc la obtinerea valorilor cele mai probabile pentru coordonatele punctelor noi. Evident ca datorita modificarii coordonatelor, are loc si o variatie a orientarii, ce poate fi calculata astfel:
iijiijjijjijij dybdxadybdxad −−+=θ
0
0sin
ij
ijccij D
aθ
ρ−= 0
0cos
ij
ijccij D
bθ
ρ=unde
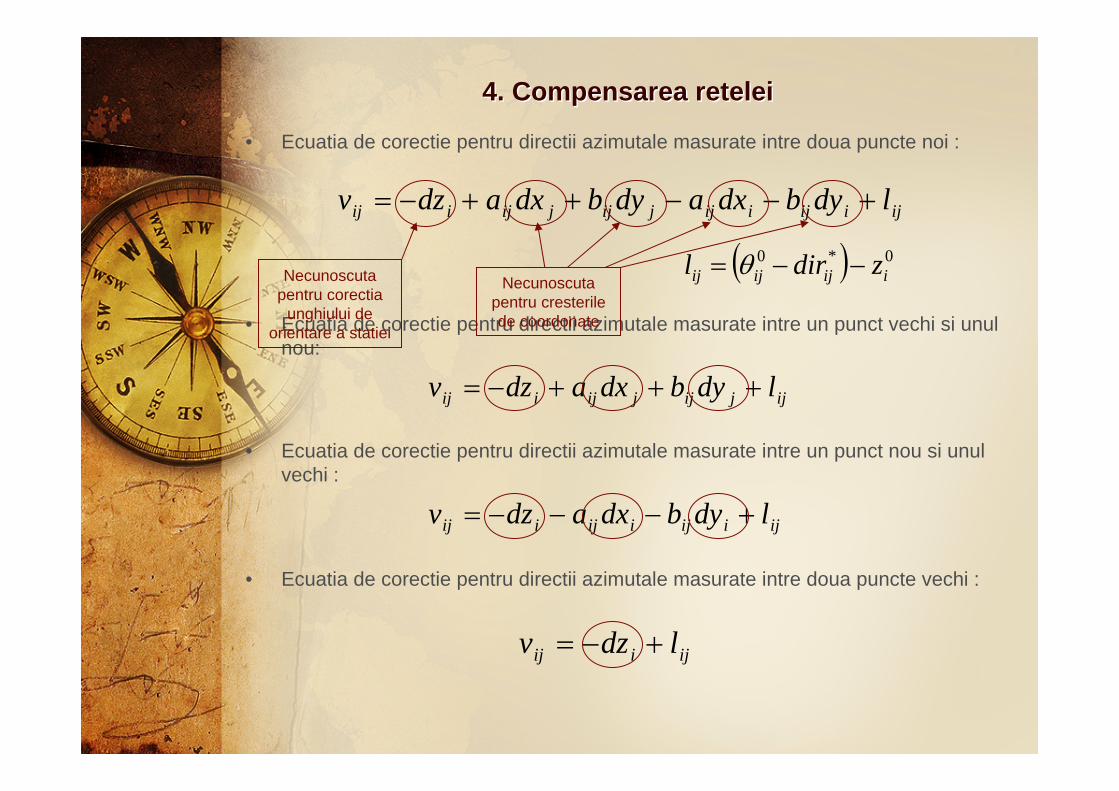
• Ecuatia de corectie pentru directii azimutale masurate intre doua puncte noi :
4. Compensarea retelei4. Compensarea retelei
ijiijiijjijjijiij ldybdxadybdxadzv +−−++−=
( ) 0*0iijijij zdirl −−= θ
• Ecuatia de corectie pentru directii azimutale masurate intre un punct vechi si unul nou:
• Ecuatia de corectie pentru directii azimutale masurate intre un punct nou si unul vechi :
• Ecuatia de corectie pentru directii azimutale masurate intre doua puncte vechi :
ijjijjijiij ldybdxadzv +++−=
ijiijiijiij ldybdxadzv +−−−=
ijiij ldzv +−=
Necunoscuta pentru corectia
unghiului de orientare a statiei
Necunoscuta pentru cresterile de coordonate
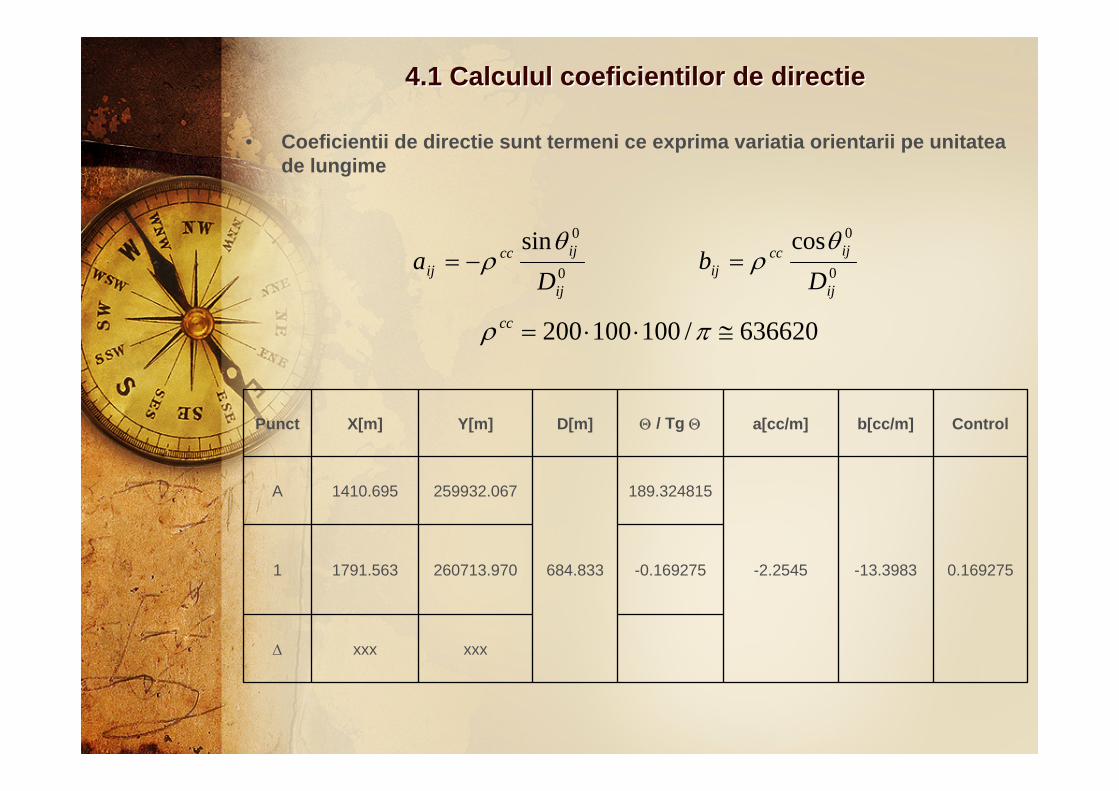
4.1 Calculul coeficientilor de directie4.1 Calculul coeficientilor de directie
xxxxxx∆
-0.169275260713.9701791.5631 0.169275-13.3983-2.2545
189.324815
684.833
259932.0671410.695A
Controlb[cc/m]a[cc/m]Θ / Tg ΘD[m]Y[m]X[m]Punct
0
0sin
ij
ijccij D
aθ
ρ−= 0
0cos
ij
ijccij D
bθ
ρ=
636620/100100200 ≅⋅⋅= πρ cc
• Coeficientii de directie sunt termeni ce exprima variatia orientarii pe unitatea de lungime
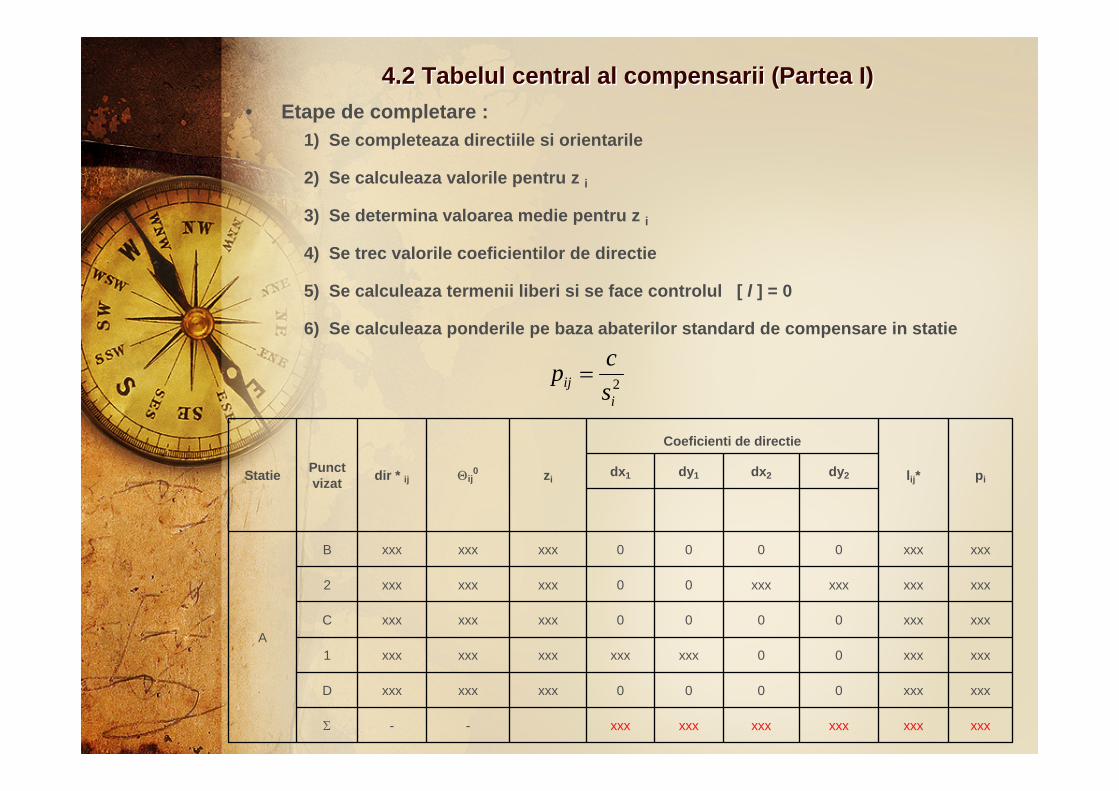
4.2 Tabelul central al compensarii (Partea I)4.2 Tabelul central al compensarii (Partea I)
xxxxxxxxxxxxxxxxxxxxx--Σ
xxxxxx0000xxxxxxxxxD
xxxxxx00xxxxxxxxxxxxxxx1
xxxxxx0000xxxxxxxxxC
xxxxxxxxxxxx00xxxxxxxxx2
xxxxxx0000xxxxxxxxxB
A
dy2dx2dy1dx1 pilij*
Coeficienti de directie
ziΘij0dir * ij
Punct vizatStatie
• Etape de completare :1) Se completeaza directiile si orientarile
2) Se calculeaza valorile pentru z i
3) Se determina valoarea medie pentru z i
4) Se trec valorile coeficientilor de directie
5) Se calculeaza termenii liberi si se face controlul [ l ] = 0
6) Se calculeaza ponderile pe baza abaterilor standard de compensare in statie
2i
ij scp =
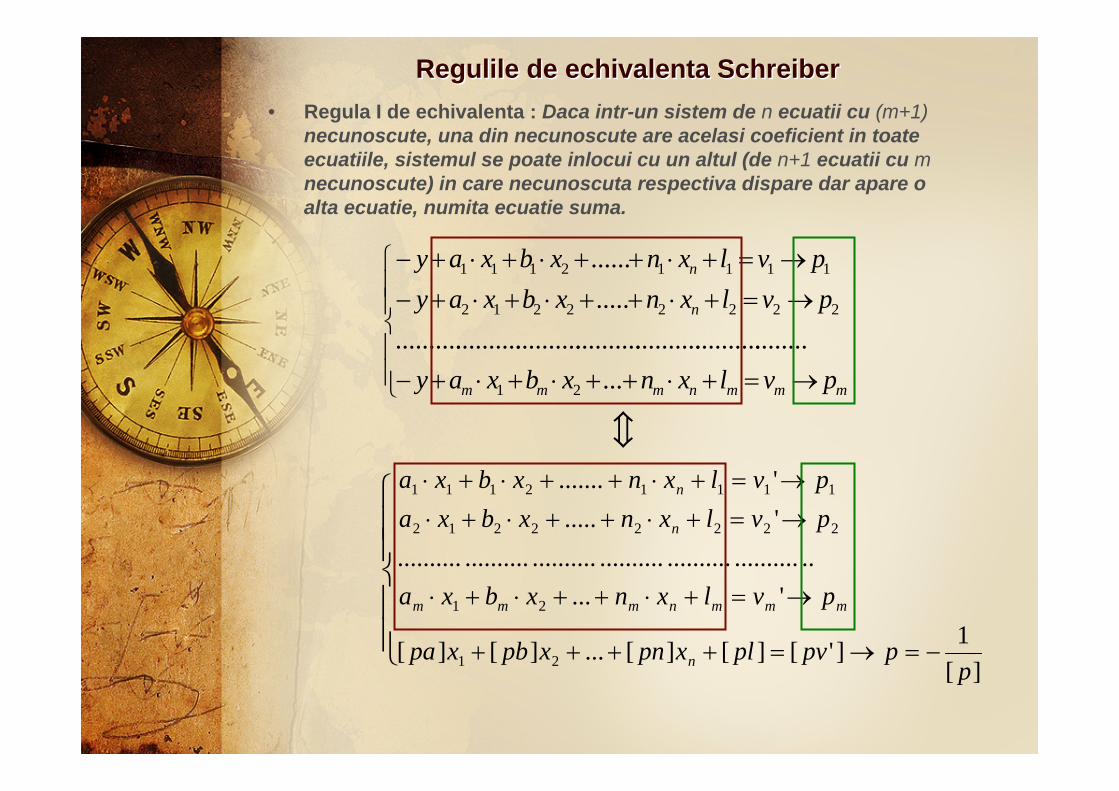
Regulile de echivalenta SchreiberRegulile de echivalenta Schreiber• Regula I de echivalenta : Daca intr-un sistem de n ecuatii cu (m+1)
necunoscute, una din necunoscute are acelasi coeficient in toateecuatiile, sistemul se poate inlocui cu un altul (de n+1 ecuatii cu m necunoscute) in care necunoscuta respectiva dispare dar apare o alta ecuatie, numita ecuatie suma.
⎪⎪⎩
⎪⎪⎨
⎧
→=+⋅++⋅+⋅+−
→=+⋅++⋅+⋅+−→=+⋅++⋅+⋅+−
mmmnmmm
n
n
pvlxnxbxay
pvlxnxbxaypvlxnxbxay
.......................................................................
...........
21
22222212
11112111
][1]'[][][...][][
'.................................................................
'.....'.......
21
21
22222212
11112111
pppvplxpnxpbxpa
pvlxnxbxa
pvlxnxbxapvlxnxbxa
n
mmmnmmm
n
n
−=→=++++
→=+⋅++⋅+⋅
→=+⋅++⋅+⋅→=+⋅++⋅+⋅
⎪⎪⎩
⎪⎪⎨
⎧
c
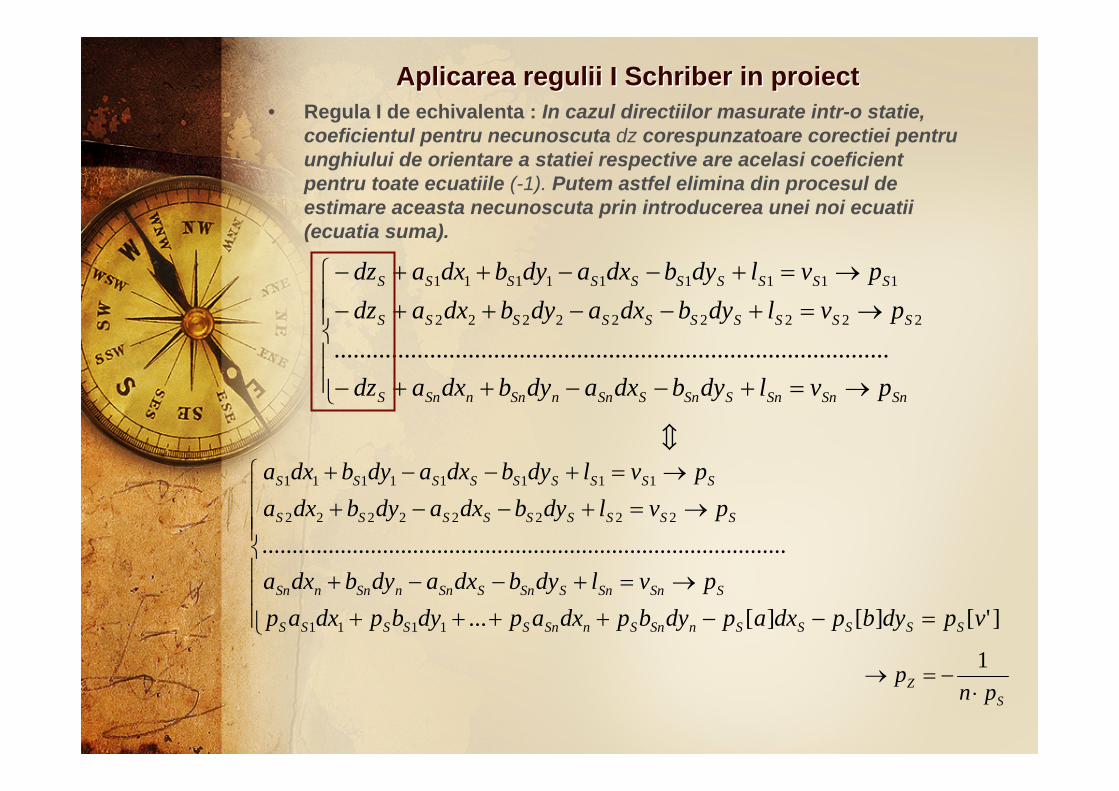
Aplicarea regulii I Schriber in proiectAplicarea regulii I Schriber in proiect
⎪⎪⎩
⎪⎪⎨
⎧
→=+−−++−
→=+−−++−→=+−−++−
SnSnSnSSnSSnnSnnSnS
SSSSSSSSSS
SSSSSSSSSS
pvldybdxadybdxadz
pvldybdxadybdxadzpvldybdxadybdxadz
.......................................................................................222222222
111111111
c
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=−−++++→=+−−+
→=+−−+→=+−−+
]'[][][...
.......................................................................................
1111
22222222
11111111
vpdybpdxapdybpdxapdybpdxappvldybdxadybdxa
pvldybdxadybdxapvldybdxadybdxa
SSSSSnSnSnSnSSSSS
SSnSnSSnSSnnSnnSn
SSSSSSSSS
SSSSSSSSS
• Regula I de echivalenta : In cazul directiilor masurate intr-o statie, coeficientul pentru necunoscuta dz corespunzatoare corectiei pentru unghiului de orientare a statiei respective are acelasi coeficient pentru toate ecuatiile (-1). Putem astfel elimina din procesul de estimare aceasta necunoscuta prin introducerea unei noi ecuatii (ecuatia suma).
SZ pn
p⋅
−=→1
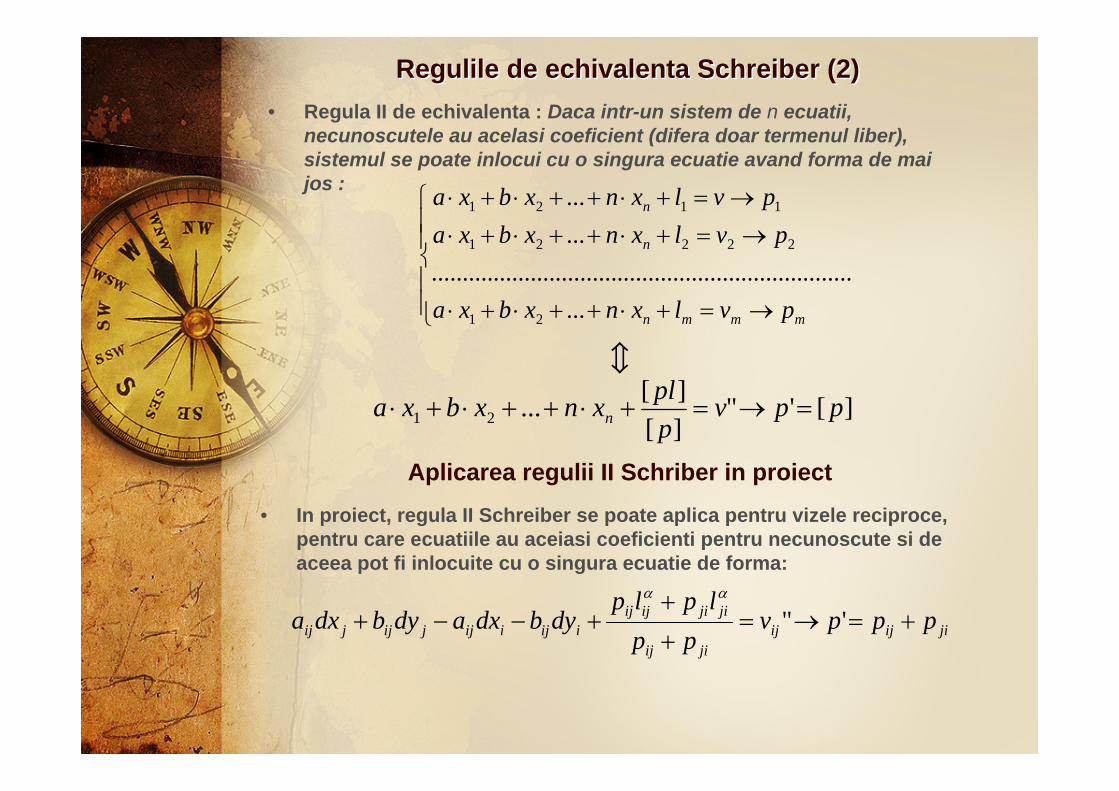
Regulile de echivalenta Schreiber (2)Regulile de echivalenta Schreiber (2)• Regula II de echivalenta : Daca intr-un sistem de n ecuatii,
necunoscutele au acelasi coeficient (difera doar termenul liber), sistemul se poate inlocui cu o singura ecuatie avand forma de mai jos :
⎪⎪⎩
⎪⎪⎨
⎧
→=+⋅++⋅+⋅
→=+⋅++⋅+⋅→=+⋅++⋅+⋅
mmmn
n
n
pvlxnxbxa
pvlxnxbxapvlxnxbxa
.......................................................................
...
...
21
22221
1121
]['"][][...21 ppv
pplxnxbxa n =→=+⋅++⋅+⋅
c
Aplicarea regulii II Schriber in proiect
• In proiect, regula II Schreiber se poate aplica pentru vizele reciproce, pentru care ecuatiile au aceiasi coeficienti pentru necunoscute si de aceea pot fi inlocuite cu o singura ecuatie de forma:
jiijijjiij
jijiijijiijiijjijjij pppv
pplplp
dybdxadybdxa +=→=+
++−−+ '"
αα
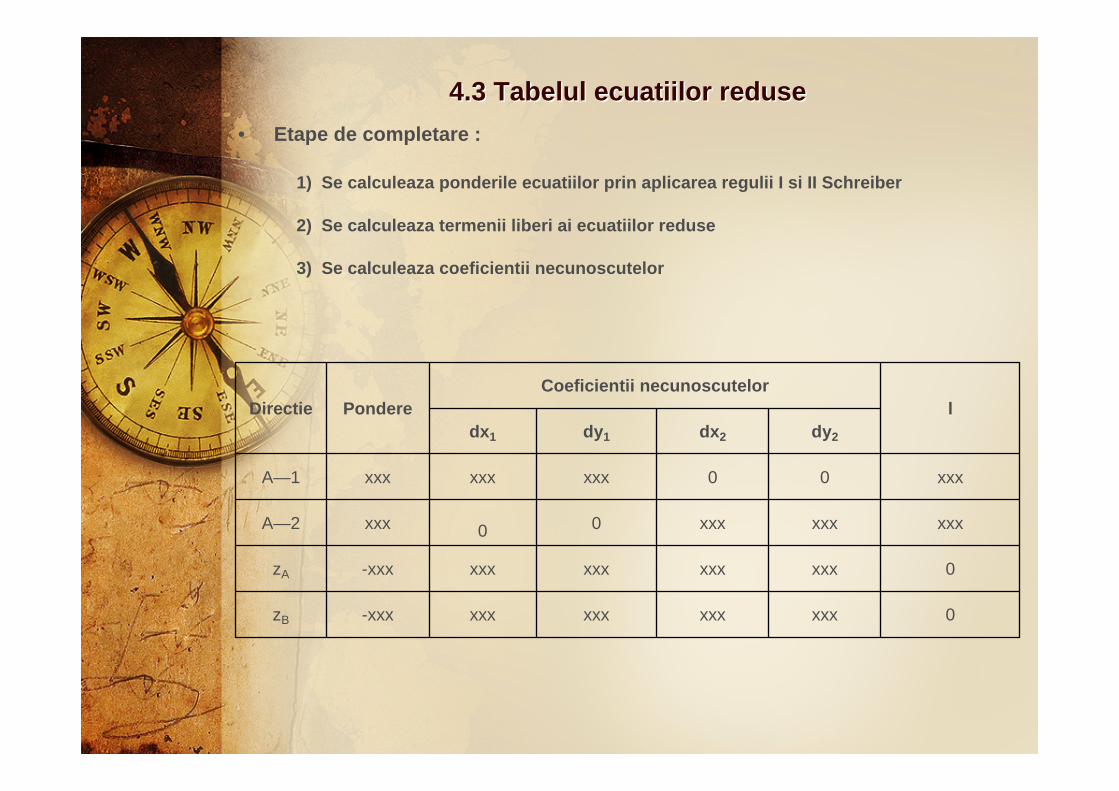
4.3 Tabelul ecuatiilor reduse4.3 Tabelul ecuatiilor reduse• Etape de completare :
1) Se calculeaza ponderile ecuatiilor prin aplicarea regulii I si II Schreiber
2) Se calculeaza termenii liberi ai ecuatiilor reduse
3) Se calculeaza coeficientii necunoscutelor
0xxxxxxxxxxxx-xxxzB
0xxxxxxxxxxxx-xxxzA
xxxxxxxxx00xxxA—2
xxx00xxxxxxxxxA—1
dy2dx2dy1dx1
lCoeficientii necunoscutelor
PondereDirectie
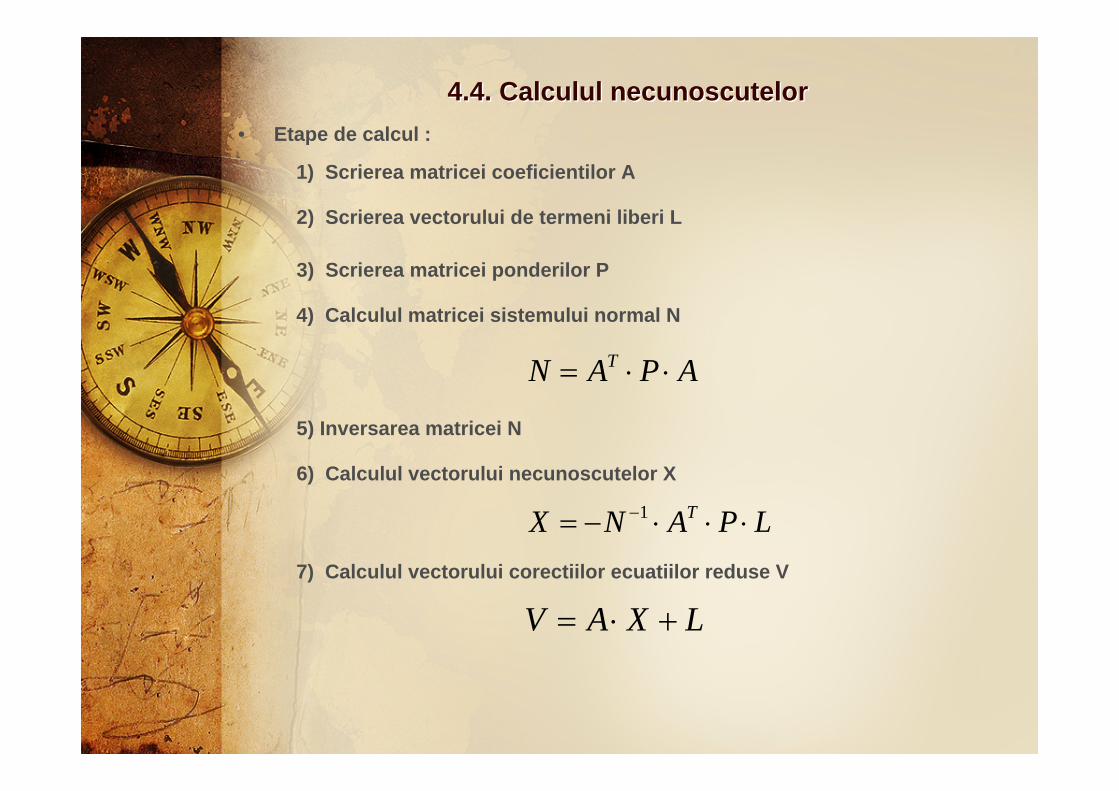
4.4. Calculul necunoscutelor4.4. Calculul necunoscutelor
LXAV +⋅=
APAN T ⋅⋅=
• Etape de calcul :
1) Scrierea matricei coeficientilor A
2) Scrierea vectorului de termeni liberi L
3) Scrierea matricei ponderilor P
4) Calculul matricei sistemului normal N
5) Inversarea matricei N
6) Calculul vectorului necunoscutelor X
7) Calculul vectorului corectiilor ecuatiilor reduse V
LPANX T ⋅⋅⋅−= −1
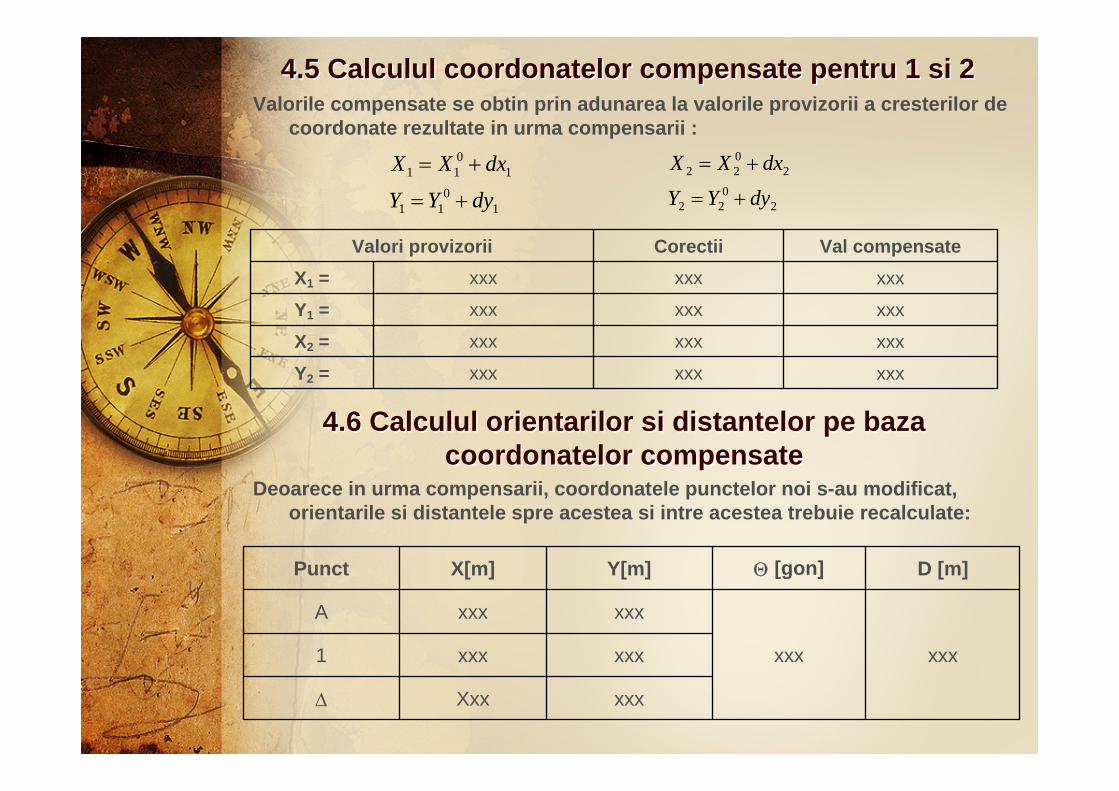
4.5 Calculul coordonatelor compensate pentru 1 si 2 4.5 Calculul coordonatelor compensate pentru 1 si 2
xxxXxx∆
xxxxxx1 xxxxxx
xxxxxxA
D [m]Θ [gon]Y[m]X[m]Punct
4.6 Calculul orientarilor si distantelor pe baza coordonatelor compensate
4.6 Calculul orientarilor si distantelor pe baza coordonatelor compensate
xxxxxxxxxY2 = xxxxxxxxxX2 = xxxxxxxxxY1 = xxxxxxxxxX1 =
Val compensateCorectiiValori provizorii
10
11
1011
dyYY
dxXX
+=
+=
20
22
2022
dyYY
dxXX
+=
+=
Valorile compensate se obtin prin adunarea la valorile provizorii a cresterilor de coordonate rezultate in urma compensarii :
Deoarece in urma compensarii, coordonatele punctelor noi s-au modificat, orientarile si distantele spre acestea si intre acestea trebuie recalculate:
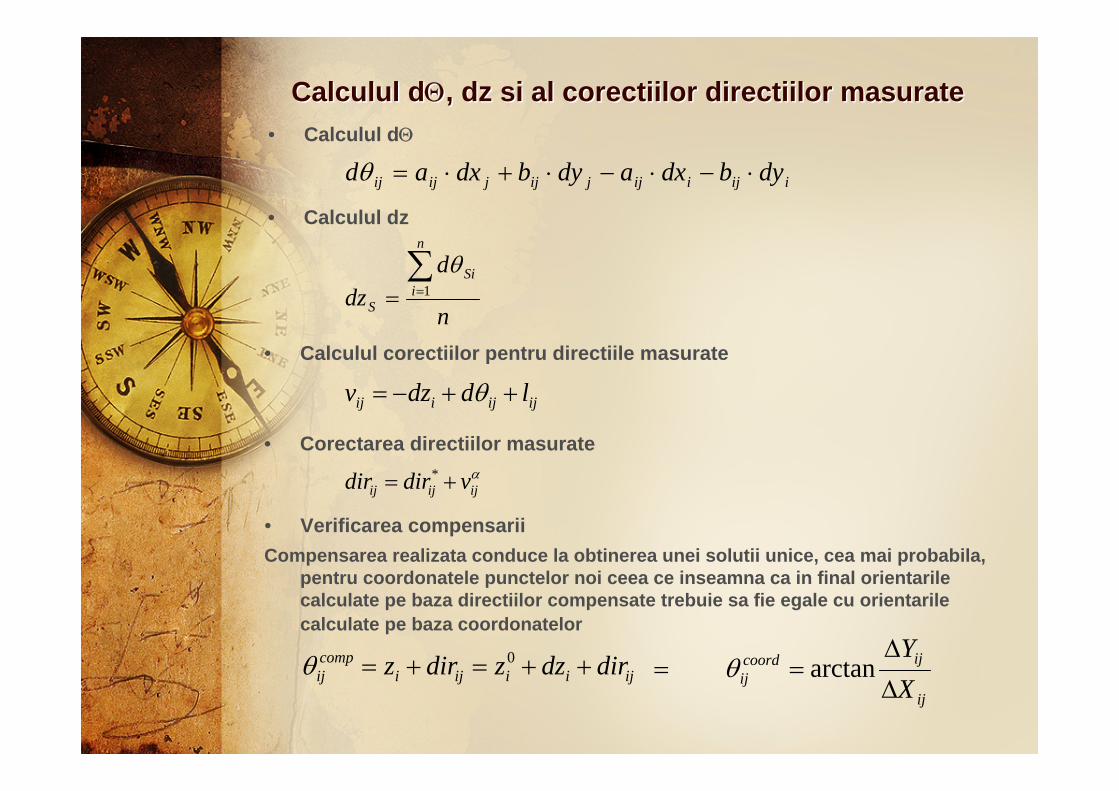
Calculul dΘ, dz si al corectiilor directiilor masurate Calculul dΘ, dz si al corectiilor directiilor masurate
iijiijjijjijij dybdxadybdxad ⋅−⋅−⋅+⋅=θ
n
ddz
n
iSi
S
∑== 1
θ
ijijiij lddzv ++−= θ
αijijij vdirdir += *
• Calculul dΘ
• Calculul dz
• Calculul corectiilor pentru directiile masurate
• Corectarea directiilor masurate
• Verificarea compensariiCompensarea realizata conduce la obtinerea unei solutii unice, cea mai probabila,
pentru coordonatele punctelor noi ceea ce inseamna ca in final orientarile calculate pe baza directiilor compensate trebuie sa fie egale cu orientarile calculate pe baza coordonatelor
ijiiijicompij dirdzzdirz ++=+= 0θ
ij
ijcoordij X
Y∆
∆== arctanθ
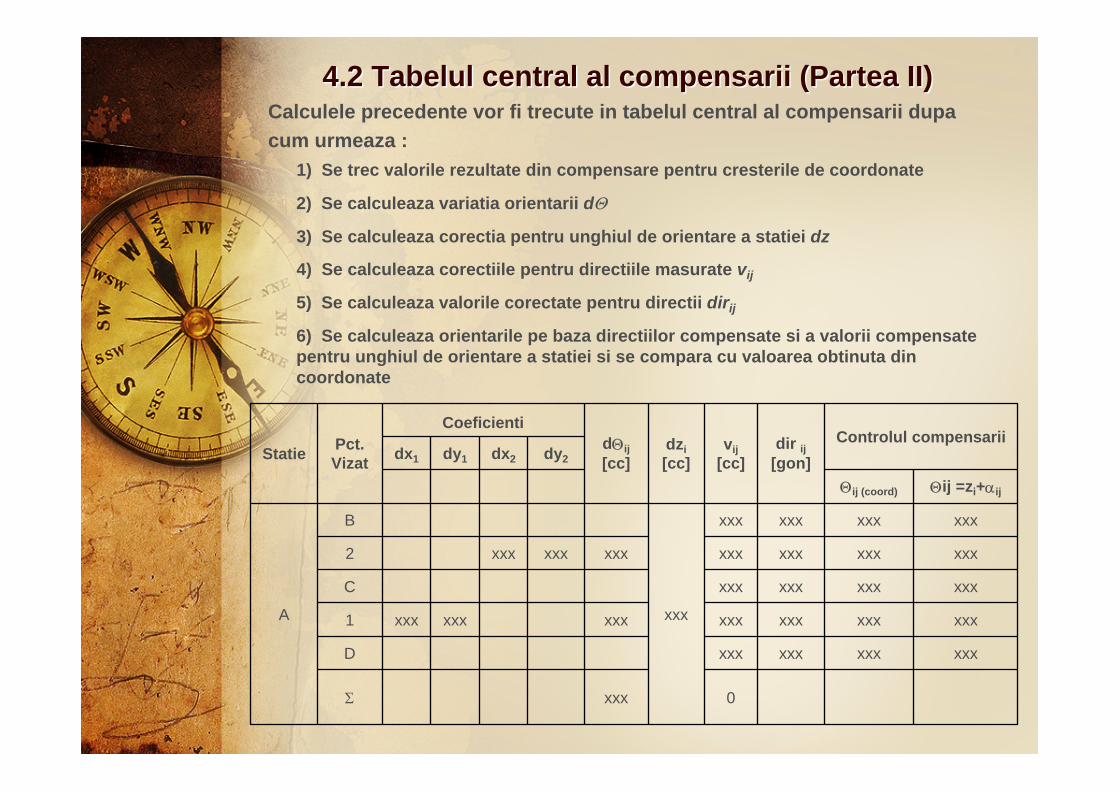
4.2 Tabelul central al compensarii (Partea II)4.2 Tabelul central al compensarii (Partea II)Calculele precedente vor fi trecute in tabelul central al compensarii dupacum urmeaza :
0xxxΣ
xxxxxxxxxxxxD
xxxxxxxxxxxxxxxxxxxxx1
xxxxxxxxxxxxC
xxxxxxxxxxxxxxxxxxxxx2
xxxxxxxxxxxx
xxx
B
A
Θij =zi+αijΘij (coord)xxxxxxxxxxxx
dy2dx2dy1dx1
Controlul compensariidir ij[gon]
vij[cc]
dzi [cc]
dΘij[cc]
CoeficientiPct. VizatStatie
1) Se trec valorile rezultate din compensare pentru cresterile de coordonate
2) Se calculeaza variatia orientarii dΘ
3) Se calculeaza corectia pentru unghiul de orientare a statiei dz
4) Se calculeaza corectiile pentru directiile masurate vij
5) Se calculeaza valorile corectate pentru directii dirij
6) Se calculeaza orientarile pe baza directiilor compensate si a valorii compensate pentru unghiul de orientare a statiei si se compara cu valoarea obtinuta din coordonate
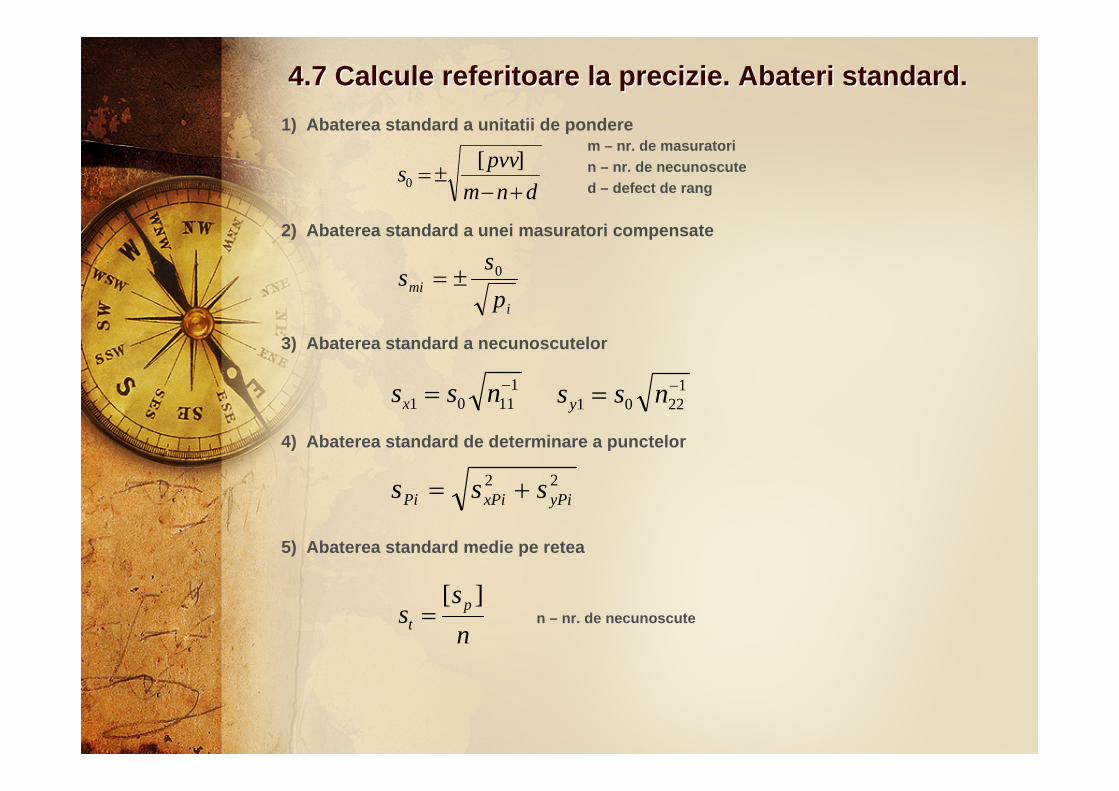
4.7 Calcule referitoare la precizie. Abateri standard.4.7 Calcule referitoare la precizie. Abateri standard.1) Abaterea standard a unitatii de pondere
dnmpvvs+−
±=][
0
m – nr. de masuratorin – nr. de necunoscuted – defect de rang
2) Abaterea standard a unei masuratori compensate
imi p
ss 0±=
3) Abaterea standard a necunoscutelor
4) Abaterea standard de determinare a punctelor
22yPixPiPi sss +=
5) Abaterea standard medie pe retea
12201−= nssy
11101−= nssx
ns
s pt
][= n – nr. de necunoscute
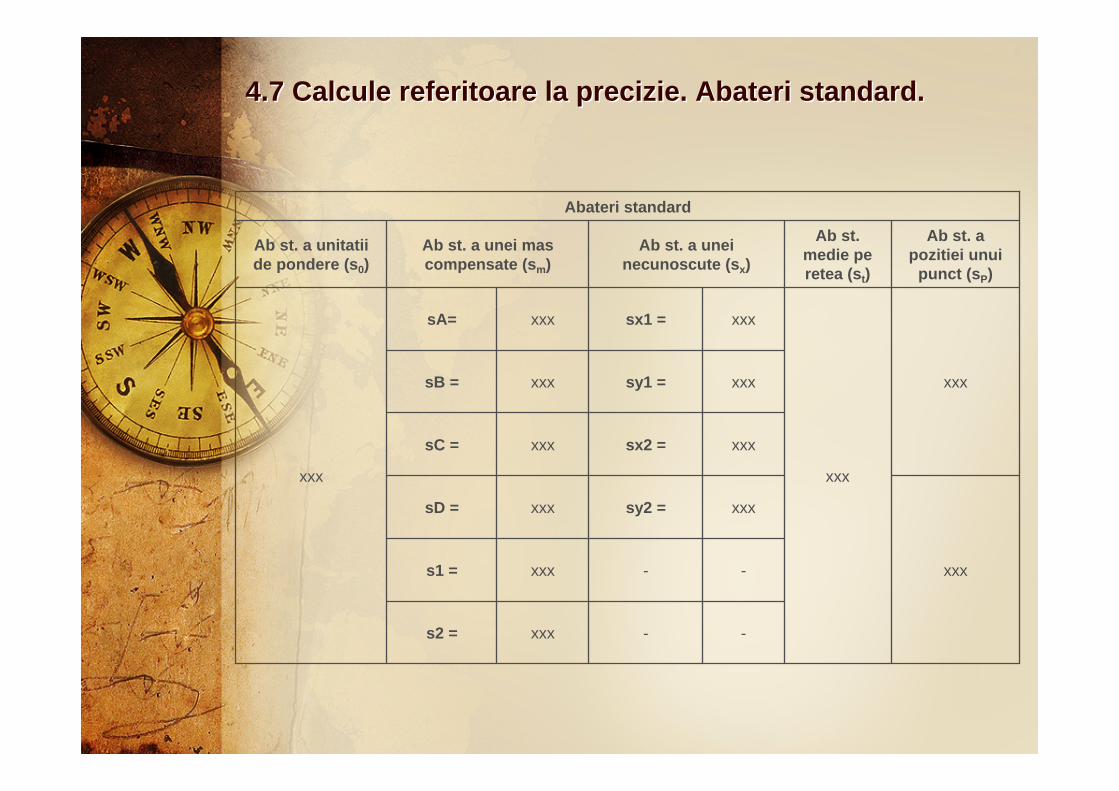
4.7 Calcule referitoare la precizie. Abateri standard.4.7 Calcule referitoare la precizie. Abateri standard.
Abateri standard
xxxsy2 =xxxsD =
--xxxs1 = xxx
--xxxs2 =
xxxsx2 =xxxsC =
xxxsy1 = xxxsB = xxx
xxx
xxxsx1 = xxxsA=
xxx
Ab st. a pozitiei unui
punct (sP)
Ab st. medie pe retea (st)
Ab st. a unei necunoscute (sx)
Ab st. a unei mas compensate (sm)
Ab st. a unitatii de pondere (s0)