Mecanime Proiect 123
27
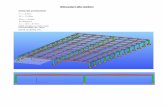
Mecanismul de ghidare a punctului E Se dă mecanismul de ghidare a punctului E a cărui schemă cinematică este dată în figura de mai jos : Q C α E 2 β B 1 3 φ 1 A D La acest mecanism se cunosc următoarele date : Variaţi tip Date II Wal t AB [m] 0,35 BC 4,54 x AB CD 1,82 x AB AD 1,64 x AB BE 2,27 x AB CE 1,22 x AB A 2
Transcript of Mecanime Proiect 123

Mecanismul de ghidare a punctului E
Se dă mecanismul de ghidare a punctului E a cărui schemă cinematică este dată în figura de mai jos :
Q
C α E
2 βB
1 3 φ1
A D
La acest mecanism se cunosc următoarele date :
Variaţi tip Date
II Walt
AB [m] 0,35BC 4,54 x AB
CD 1,82 x AB AD 1,64 x AB BE 2,27 x AB CE 1,22 x AB A 2 Q [N] 20 P [N] 12 α [ O] 60 β [ O] 25 CH 0,6 x CD φ10 [O] 70 ω [rad/s] 9
Mecanismul din figură are următoarele laturi cu lungimile :AB = 0,35 [m]BC = 1,54 x AB ; BC = 0,53 [m]CD = 1,82 x AB ; CD = 0,63 [m]AD = 1,64 x AB ; AD = 0,57 [m]BE = 2,27 x AB ; BE = 0,79 [m]

CE = 1,22 x AB ; CE = 0,42 [m]CH = 0,6 x CD ; CH = 0,37 [m]
Mecanismul funcţionează în plan vertical şi se neglijează influenţa frecări din cuplele acestui mecanism.
Cap I : Analiza structurală a mecanismului
1.1. Schema cinematică a mecanismului :
C E y
2 H
B 1 3
Ax D
z 1.2.1. Familia mecanismului : Axyz – fix
Element vx vy vz ωx ωy ωz
1 X 2 X X X 3 X f = 3 1.2. 2. Mobilitatea . Desmodromia . MB= 3 x m – 1 x C4 – 2 x C5
m= 3 ; C4 = 0 ; C5 = 4 M3 = 3 x 3 – 2 x 4 M3 = 1
Rezultă mecanismul este desmodrom cu elementul conductor 1.
1.3. Schema structurală a mecanismului funcţional:
E
2

C
B
ω1
Mec (1) A D
1.4. Determinarea numărului de contururi la mecanismul funcţional.
Se face pe baza schemei structurale a mecanismului cu relaţia: N = C – m N – numărul contururilor C – numărul cuplelor fundamentale M – numărul elementelor mobile
C = 4 ; m = 3 N = 4-3 N = 1 Conturul este ABCDA
1.5. Descompunerea în grupe structurale: 3
C 1 2 C
B Eω1
φ10 BMec (1) A B
1.6. Schema multipolară. Relaţia structurală.
A BME(1)
D1
(2,3)
Z(0) C
Analiza cinematică Analiza cinetostatică
3

Relaţia structurală este: Z(0) + ME (1) + D1( 2,3 )
Cap II: Analiza cinematică a mecanismului.
2.1. Analiza rotabilităţii din cupla motoare :a) Rotabilitatea din cupla motoare A
S1 = AB + AD S1 = 0,92 [m]D1 = ׀ AB –AD ׀ D1 = 0,22 [m]
S2 = BC + CD S2 = 1,16 [m]D2 = ׀ BC – CD ׀ D2 = 0,1 [m]
Condiţia de rotabilitate : AB – manivelă
b) Rotabilitatea din cupla D :
S3 = AD + CD S3 = 0,57D3 = ׀ AD – CD ׀ D3 = 0,63
S4 = AB + BC S4 = 0,88D4 = ׀ AB – BC ׀ D4 = 0,18
Condiţia de rotabilitate : DC – balansier
c) Rotabilitatea din cupla B :
S5 = AB + BC S5 = 0,88 D5 = ׀ AB – BC ׀ D5 = 0,18
S6 = CD + AD S6 = 0,35 D6 = ׀ CD – AD ׀ D6 = 0,06
d) Rotabilitatea din cupla C :
S7 = BC +CD S7 = 1,16D7 = ׀ BC - CD ׀ D7 = 0,1
S8 = AB + AD S8 = 0,92D8 = ׀ AB - AD ׀ D8 = 0,22
4

Din studiul celor două cuple rezultă că BC este o bielă care face o mişcare oscilatorie.
2.2. Calculul scări :
Se alege scara: kl = = = 0,007
[AB] = ; AB = 50 mm .
[BC] = ; BC = 75 mm .
[CD] = ; CD = 60 mm.
[AD] = ; AD = 81 mm.
[BE] = ; BE = 112 mm.
[CE] = ; CE = 60 mm.
[CH] = ; CH = 52 mm.
2.3. Determinarea experimentală (pe machetă ) a mărimi ciclului:
Elementul conducător este elementul 1, care face o mişcare de rotaţie completă. Rezultă că mărimea ciclului cinematic este de 360o.
φc = 360o [grade]
2.4. Determinarea tipului elementelor conduse din punct de vedere al mişcări executate.
Elementul conducător este biela BC, care face o mişcare oscilatorie, realizată cu ajutorul manivelei AB care face mişcare de rotaţie completă.
Cap III.Analiza cinematică a mecanismului
5

3.1. Determinare poziţiei elementelor şi punctelor caracteristice ale mecanismului.3.1.1. Schema cinematică a mecanismului la scară în poziţiile:
a. Iniţială corespunzătoare unghiului φ10 ( 70o).b. În poziţia φ1.
φ1 = φ10 +
φ1 = 70 + [grade]
φ1 = 190o
3.1.2. Traiectoria punctului caracteristic E pe ciclul cinematic începând cu poziţia φ10
cu un pas ∆φ1 ales convenabil preciziei traiectoriei:a. Metoda graficăb. Metoda analitică
3.1.2.a. Metoda grafică.
Metoda grafică se face pe două planşe A3. mecanismul se desenează în poziţia iniţială ( planşa 1) şi în poziţia φ1 = 190o (planşa 2).
Traiectoria punctului E
[XE] [YE] [XE] [YE]
\Vm [mm] [mm] [mm] [mm]
700 182 79 1.27 0.55
190o 83 31 0.58 0.21
3.1.2.b. Metoda analitică.
Punctelecaracteristice
X[mm]
Y[mm]
A 0 0B 25 64C 113 125D 114 70E 180 71
6

Determinarea poziţiilor elementelor şi punctelor caracteristice. Scriem ecuaţia vectorială de închidere a conturului principal ABCD.
y C
B φ2 E
ε1
ω1 φ3
A φ1
x
Conturul este ABCDA.N = C – m N = 1
= + (1) = + (2)
Proiecţia pe axa:
AX: AB cos φ1 + BC cos φ2 = AD cos φ0 + CD cos φ3 (4) AY: AB sin φ1 + BC sin φ2 = AD sin φ0 + CD sin φ3 (5)
(6) şi (7) Necunoscutele sunt φ2 , φ3
AB2 cos2 φ1+BC2cos2 φ2+2AB BC cos φ1cos φ2 – - 2AB AD cos φ1 – – 2BC AD cos φ2 = DC2 cos2 φ3 (8)
AB2sin2φ1+BC2sin2φ2+2AB sin φ1sin φ2=DC2sin2 φ3 (9)
Din relaţiile 8 şi 9 rezultă: AB2+BC2+AD2-2BC(AB cosφ2-AD)cos φ2+2AB BC sin φ1sin φ2-1AB AD cos φ2
A cos φ2+B sin φ2+C = 0
(12)
; ; (13)
Din 13 şi 14:
7

-A t2 + C t + 2B t + C – A = 0 t2 ( C-A) + 2B t + C + A = 0
A = 2 . 0.35(0.35 ۰ 0.34 – 0.57)A = -0.31
B = 2 ۰ 0.35 ۰ 0.53 ۰ 0.93B = 0.34
C = 0.125 + 0.34 – 0.39 + 0.28 – 2 ۰ 0.35 ۰ 0.57 ۰ 0.34
C = 0.22
8

φ2 = 55o
Notăm laturile mecanismului:
AB = l1 ; AB = 0.35 BC = l21 ; BC = 0.53BE = l22 ; BE = 0.79CD = l3 ; CD = 0.63
l1 cos φ1 + l3 cosφ3 – AD = -l21 cosφ2
l1 sin φ1 + l3 sin φ3 = -l21 sin φ2
l21(cos2φ1 + sin2 φ1) + l2
3(cos2 φ3 – sin2 φ3) – l221(cos2 φ2 + sin2 φ2)+cos φ3 (2 l1l3 cos φ1 –
-2 AD l3) + sin φ3 (2l1l2sin φ1) – 2AD l1cos φ1 = 0
l21 + l2
3 - l221 -2AD l1cosφ1 + cos φ3 [ 2 l3 ( l1cos φ1 – AD)] + sin φ3( 2 l1l3 sin φ1) = 0
cos φ3 A + sin φ3 B + C = 0 A = 2 l3 ( l1cos φ1 – AD) ; A = -0.98 B = 2 l1l3 sin φ1 ; B = 0.41 C = l2
1 + l23 - l2
21 +AD2 ; C = 0.57
Analog pentru poziţia φ1 = 190o rezultă : φ2 = 31o şi φ3 = 35o .
3.2. Determinarea vitezelor elementelor şi punctelor caracteristice în poziţiile φ10 şi φ1.
3.2.1. Metoda grafoanalitică.
9

Pentru mecanismul R.R.R în poziţia φ10 = 70 o .
ω1 = 9
vB = ω1 ٠AB = 9 ٠0.35 = 3.15
kv = ; [vB] = 50 mm
;
Din poligonul vitezelor rezultă vitezele vC şi vCB
[VBC ] = 22 mm ; rezultă VBC = 22 * 0.06 =1.32[VC ] = 32 mm ; rezultă VC = 32 * 0.06 =1.92
VCB = ω2٠BC ; ω2 =
VC = ω3٠CD ; ω3 =
Rezultă că [vBE] =
Din poligonul vitezelor rezultă [VE] =45
DH = CD – CHDH = 0.63 – 0.37 ; DH = 0.26
10

Pentru mecanismul R.R.R în poziţia φ1 = 190 o .
;
Din poligonul vitezelor rezultă vitezele vC şi vCB
[VBC ] = 29 mm ; rezultă VBC = 29 * 0.06 =1.74
[VC ] = 36 mm ; rezultă VC = 36 * 0.06 = 2.16
VCB = ω2٠BC ; ω2 =
VC = ω3٠CD ; ω3 =
Rezultă că [vBE] =
Din poligonul vitezelor rezultă [VE] =10 mm
11

DH = CD – CHDH = 0.63 – 0.37 ; DH = 0.26
3.2.2. Metoda analitică.l1cosφ1 + l21cosφ2 + l3cosφ3 = ADl1sinφ1 + l21sinφ2 + l3sinφ3 = 0 (1)-l1ω1sinφ1 – l2ω2sinφ2 – l3ω3sinφ3 = 0 l1ω1cos φ1 + l2ω2cosφ2 + l3ω3cosφ3 = 0
Din relaţia (1) rezultă:
ω2 = 2.29
12

13

vH = 4.65
vBx vBy vB vCx vCy vC vEx vEy vE vC1x vC1y vC1 vC2x vC2z vC2 2 2
70
0
-2.9
6
0.32 2.1
-3.9
43
1.01
4.06
-2.9
9
0.57
1.31
-1.4
8
0.16
1.48
-2.1
1
0.71
2.22
2.29 55
1900
0.54
-0.3
4
0.63
1.43
-1.8
3
2.31
8
2.72
-1.3
5
2.64
0.27
-0.1
7
0.31
1.46
-1.3
1.95
3.28
31.2
83.2.3. Calculul erorilor la viteze în cele 2 poziţii:
uM
1
2
[%]vB
[%]vC
[%]vE
[%]vC1
[%]vC2
[%]70o 0.87 0.5 0.33 0.2 0.1 0.01190o 0.0 4 0.01 0.77 4 0.148
14

3.3. Determinarea acceleraţiilor.
3.3.1 Metoda grafo-analitică
15

16

3.3.2. Metoda analitică
aBx
m/s2
aBy
m/s2aB
m/s2aCx
m/s2aCy
m/s2aC
m/s2aEx
m/s2aEy
m/s2aE
m/s2aC1x
m/s2aC1y
m/s2aC1
m/s2aC2x
m/s2aC2y
m/s2aC2
m/s22 2
2
700
9.6
-26.
6
28.2
7
-20.
15
-23.
08
31.1
8
13.4
2
-43.
32
22.4
3
4.8
-13.
3
13.3
5.63
2
-6.0
8
8.29
20.2
4
-2.4
9
55
1900
-27.
91
4.92
28.3
4
-18.
2
22.5
28.9
3
30.3
9
55.4
55.4
3
-13.
95
2.46
14.1
6
-25.
3
39.7
3
33.5
6
45.6
3
3.28 31
3.3.3. Calculul erorilor la acceleraţii în poziţiile 1 = 700 şi 1 =1900
aB
[%]aE
[%]aC
[%]aC1
[%]aC2
[%]2
[%]
700 0,068 0,97 0,346 0,137 0,862 0,0701900 0,68 0,655 0,485 0,137 0,429 0,635
Cap IV :
Studiul unor soluţii constructive similare mecanismului din temă (minimum 2):- desen
17

- descrierea constructivă şi funcţionare- utilizare
1. Mecanism de tip R.R.R.
Mecanismul din figura 1 este folosit la ghidarea punctului M al macaralelor portuare. Punctul M trebuie să se deplaseze orizontal.
Figura 1 (schema constructivă) Figura 2 (schema cinematică)
A
O’ B M C
2. Mecanismul cu o oprire
Mecanismul din figura 3 este format din mecanismul RRRR la care s-a legat o diadă RRR (diada MEF ). Pe porţiunea superioară (arcul 1-3)curba de biela Г a punctului M poate fi aproximată cu un arc de cerc cu centru în E. Se plasează o cuplă de rotaţie în M şi alta în E, obţinând elementul 4. Cupla exterioară F a diadei MEF, adăugată mecanismului elementar ABCD, se leagă adecvat la bază, obţinând mecanismul cu o oprire AVCDMEF.
M 2
4 C1
E 5
18A

F B 3 D 1
CAP. V:
Analiza cinetostatică a mecanismului in poziţiile 1 = 700 şi 10 = 1900
5.1. Calculul forţelor şi cuplurilor care acţionează pe elementele mecanismului5.1.1. Forţele de greutate
5.1.2. Forţele şi cuplurile de inerţiea) Grafo-analitic în cele 2 poziţii
Forţa de inerţie a elementului f acţionează în centrul de greutate al elementului f şi este egală cu = acceleraţia centrului de greutate al acelui element,
fiind paralelă şi de sens opus cu
Momentul de inerţie ce acţionează asupra elementului f este egal cu produsul dintre momentul mecanic de inerţie în raport cu centrul de greutate al elementului şi acceleraţia unghiulară fiind opus ca sens acceleraţiei unghiulare f.
19

b) Modelul analitic :
uM
1 N N N N N N N N N Nm Nm Nm700 -2.64 7.31 7.77 1.97 4.57 4.979 4.160 4.77 6.33 0 2.04 0.93221900 7.76 1.35 7.876 0.03 32.97 32.68 3.75 4.65 5.97 0 5.88 1.731
5.2. Determinarea reacţiunilor din cuple – fără frecarea) Grafo-analitic în cele 2 poziţii
Se izolează diada (2,3) din mecanismul R.R.R.
uM
1 N N N Nm Nm Nm700 4.55 25.87 5.89 0 2.057 1.189
1900 18.45 24.01 5.85 0 5.881 1.744
20

Pentru menţinerea echilibrului în cuplele B, D de rotaţie se introduc reacţiunile
de direcţie oarecare. Pentru însuşirea acestora se descompun în = şi
Ecuaţia vectorială de echilibru este :
Dacă este cu minus, în poligon se schimbă sensul ales arbitrar pe model.
Alegerea de reprezentare a fortelor din primul poligon (ce contine fortele din ecuatia de mai sus) KF1
Aleg scara de reprezentare a forţelor din cel de-al doilea poligon (ce conţine forţele din ecuaţia de mai sus): KF2 = 3 [N/mm]
21

la scara de reprezentare KF2
Din poligon
Motoelementul (1)
Aleg scara de reprezentare a fortelor KF3 = 2
22