Kapitel 11 Wegintegrale - ASC: WelcomeKapitel 11 Wegintegrale 11.1 Wege Wege im R n sind der...
52
Kapitel 11 Wegintegrale 11.1 Wege Wege im R n sind der Anschauung nach etwas eindimensionales. 11.1.1 Definition. Ein Weg γ im R n ist eine Abbildung von einem Intervall [a, b] nach R n . Ist γ stetig, so sprechen wir von einem stetigen Weg. Dabei heißen zwei Wege γ :[a, b] → R n und θ :[c, d] → R n äquivalent, falls sie Umparametrisierungen voneinander sind, was bedeutet, dass es eine streng monoton wachsende Bijektion α :[a, b] → [c, d] mit θ ◦ α = γ gibt. 1 Wir schreiben auch γ ∼ θ dafür. Ist γ :[a, b] → R n ein Weg, so bezeichnet γ- :[a, b] → R n den in der Gegenrichtung durchlaufenen Weg t → γ(a + b - t). Sind γ 1 :[a 1 , b 1 ] → R n ,γ 2 :[a 2 , b 2 ] → R n zwei (stetige) Wege mit b 1 = a 2 und γ 1 (b 1 ) = γ 2 (a 2 ), so sei γ 1 ⊕ γ 2 :[a 1 , b 2 ] → R n die (stetige) Funktion mit (γ 1 ⊕ γ 2 )| [a 1 ,b 1 ] = γ 1 , (γ 1 ⊕ γ 2 )| [a 2 ,b 2 ] = γ 2 . Sind x 0 ,..., x m Punkte aus R n , so bezeichnet ---→ x 0 x 1 , ---→ x 1 x 2 ,..., -----→ x m-1 x m den stetigen Weg γ : [0, m] → R n definiert durch γ(t) = x j-1 + (t - ( j - 1))( x j - x j-1 ), wenn t ∈ [ j - 1, j] für j = 1,..., m. Solche Wege nennt man Polygonzüge. Im Fall m = 1 nennt man γ(t) = tx 1 + (1 - t) x 0 die gerade Strecke von x 0 nach x 1 und schreibt auch ---→ x 0 x 1 dafür. 1 Wegen Korollar 6.5.3 ist eine solche Bijektion α stetig. Umgekehrt ist eine stetige Bijektion α :[a, b] → [c, d] entweder streng monoton wachsend oder streng monoton fallend, vgl. Lemma 6.5.5.
Transcript of Kapitel 11 Wegintegrale - ASC: WelcomeKapitel 11 Wegintegrale 11.1 Wege Wege im R n sind der...

Kapitel 11
Wegintegrale
11.1 Wege
Wege im Rn sind der Anschauung nach etwas eindimensionales.
11.1.1 Definition.
� Ein Weg γ im Rn ist eine Abbildung von einem Intervall [a, b] nach Rn. Ist γ stetig,so sprechen wir von einem stetigen Weg.
� Dabei heißen zwei Wege γ : [a, b] → Rn und θ : [c, d] → Rn äquivalent, falls sieUmparametrisierungen voneinander sind, was bedeutet, dass es eine streng monotonwachsende Bijektion α : [a, b] → [c, d] mit θ ◦ α = γ gibt.1 Wir schreiben auchγ ∼ θ dafür.
� Ist γ : [a, b]→ Rn ein Weg, so bezeichnet γ− : [a, b]→ Rn den in der Gegenrichtungdurchlaufenen Weg t 7→ γ(a + b − t).
� Sind γ1 : [a1, b1] → Rn, γ2 : [a2, b2] → Rn zwei (stetige) Wege mit b1 = a2 undγ1(b1) = γ2(a2), so sei γ1 ⊕ γ2 : [a1, b2]→ Rn die (stetige) Funktion mit
(γ1 ⊕ γ2)|[a1,b1] = γ1, (γ1 ⊕ γ2)|[a2,b2] = γ2 .
� Sind x0, . . . , xm Punkte aus Rn, so bezeichnet −−−→x0x1,−−−→x1x2, . . . ,
−−−−−→xm−1xm den stetigenWeg γ : [0,m] → Rn definiert durch γ(t) = x j−1 + (t − ( j − 1))(x j − x j−1), wennt ∈ [ j − 1, j] für j = 1, . . . ,m. Solche Wege nennt man Polygonzüge.
� Im Fall m = 1 nennt man γ(t) = tx1 + (1 − t)x0 die gerade Strecke von x0 nach x1
und schreibt auch −−−→x0x1 dafür.
1 Wegen Korollar 6.5.3 ist eine solche Bijektion α stetig. Umgekehrt ist eine stetige Bijektion α : [a, b]→[c, d] entweder streng monoton wachsend oder streng monoton fallend, vgl. Lemma 6.5.5.

362 11 Wegintegrale
11.1.2 Beispiel. Sind x0, . . . , xm Punkte aus Rn, und definiert man für j = 1, . . . ,m denWeg x̃ j−1x j : [ j − 1, j] → Rn durch x̃ j−1x j(t) := x j−1 + (t − ( j − 1))(x j − x j−1), so sindoffenbar x̃ j−1x j und −−−−→x j−1x j äquivalent, und
x̃0x1 ⊕ · · · ⊕ ˜xm−1xm = −−−→x0x1,−−−→x1x2, . . . ,
−−−−−→xm−1xm .
11.1.3 Fakta.
1. Da mit α auch α−1 eine streng monoton wachsende Bijektion ist, ist ∼ eine Äquiva-lenzrelation. Man sieht auch unmittelbar, dass γ ∼ γ′ ⇔ γ− ∼ γ′−.
2. Ist γ : [a, b] → Rn ein Weg und ist α(t) = a + t(b − a), so ist γ äquivalent zuγ ◦ α : [0, 1]→ Rn, also äquivalent zu einem Weg mit Parametermenge [0, 1].
3. Das Bild eines stetigen Weges ist als stetiges Bild einer kompakten und zusammen-hängenden Menge wieder kompakt und zusammenhängend; siehe Proposition 6.1.13und Proposition 6.2.4.
4. Man könnte glauben, dass das Bild eines stetigen Weges den Weg schon bestimmt.Das ist aber nicht der Fall, wenn man nur an ein Geradenstück denkt, das man zuerstin die Hin- und dann in die Rückrichtung durchläuft.
5. Das Bild eines stetigen Weges kann auch ganz unerwartet aussehen. Man kann z.B.einen Weg in R2 konstruieren, der [0, 1] × [0, 1] als Bild hat.
Um einem Weg eine Länge `(γ) zuzuordnen, liegt es nahe, das zuerst bei den einfachstenArten von Wegen, nämlich den geraden Strecken γ = −→xy mit x, y ∈ Rn zu tun:
`(γ) := ‖x − y‖2 .Die Länge eines beliebigen Weges γ : [a, b]→ Rn approximiert man dadurch, dass maneine beliebige Zerlegung Z = {ξ j : j = 0, . . . , n(Z)} von [a, b] wie in Definition 8.1.2nimmt und die Länge des dazugehörigen Polygonzuges
−−−−−−−−→γ(ξ0)γ(ξ1), . . . ,
−−−−−−−−−−−−−−−→γ(ξn(Z)−1)γ(ξn(Z)) , (11.1)
nämlich
L(Z) :=n(Z)∑
j=1
‖γ(ξ j) − γ(ξ j−1)‖2
berechnet.
11.1.4 Definition. Die Länge `(γ) des Weges γ : [a, b]→ Rn ist dann das Supremum vonL(Z) über die Menge Z aller ZerlegungenZ von [a, b]:
`(γ) := supZ∈Z
L(Z) . (11.2)
Der Fall `(γ) = +∞ kann dabei auftreten. Ist jedoch `(γ) < +∞, so spricht man von einemrektifizierbaren Weg.

11.1 Wege 363
ξ0
γ(ξ0)
ξ1
γ(ξ1)
ξ2
γ(ξ2)
ξ3
γ(ξ3)
ξ4
γ(ξ4)
ξ5
γ(ξ5)
ξ6
γ(ξ6)
ξ7a = = b : Z
γ(ξ7)
γ([a, b])
γ
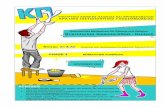
Abbildung 11.1: Polygonzüge zur Approximation der Weglänge
11.1.5 Fakta.
1. Ist γ : [0, 1] → Rn, γ(t) = tx1 + (1 − t)x0 eine gerade Strecke, so gilt für einebeliebige ZerlegungZ
L(Z) =
n(Z)∑
j=1
‖(ξ j − ξ j−1)(x1 − x0)‖2 = ‖x − y‖2 .
Also ist unser Zugang zur Weglänge in sich konsistent.
2. Da Z bezüglich ⊆ eine gerichtete Menge ist, und da wegen der Dreiecksungleichung,‖γ(w) − γ(u)‖2 ≤ ‖γ(w) − γ(v)‖2 + ‖γ(v) − γ(u)‖2, ausZ1 ⊆ Z2 folgt, dass L(Z1) ≤L(Z2), kann man `(γ) als Limes eines monoton wachsenden Netzes über (Z,⊆)schreiben: `(γ) = limZ∈Z L(Z).
3. Für ein nicht konstantes γ gibt es t1, t2 ∈ [a, b], sodass γ(t1) , γ(t2). Dann folgtL({a, b, t1, t2}) ≥ ‖γ(t1) − γ(t2)‖2 > 0, und damit `(γ) > 0. Ist dagegen γ konstant, sofolgt sofort aus der Definition `(γ) = 0. In jedem Fall gilt
`(γ) ≥ L({a, b}) = ‖γ(b) − γ(a)‖2 . (11.3)
4. Da sich die Zerlegungen der Definitionsbereiche von äquivalenten Wegen bijektiventsprechen, überzeugt man sich leicht, dass äquivalente Wege dieselbe Länge haben.Genauso leicht sieht man `(γ) = `(−γ).
5. Aus der Monotonie (vgl. 2) folgt für ein endliches A ⊆ [a, b] unmittelbar, dass auch
`(γ) = supZ∈Z, Z⊇A
L(Z) .

364 11 Wegintegrale
Da ZA := {Z ∈ Z : Z ⊇ A} mit ⊆ zu einer gerichteten Menge wird, und da L(Z)monoton vonZ abhängt, gilt wegen (5.10) und Bemerkung 5.3.9 auch
`(γ) = limZ∈ZA
L(Z) .
6. Seien γ1 : [a1, b1] → Rn, γ2 : [a2, b2] → Rn zwei Wege, sodass b1 = a2 undγ1(b1) = γ2(a2). Infolge ist γ1 ⊕ γ2 : [a1, b2] → Rn definiert. Weiters seien Z1, Z2
bzw. Z die Menge aller Zerlegungen von [a1, b1], [a2, b2] bzw. [a1, b2].
Für A = {a2} und Z ∈ ZA gilt offenbar Z ∩ [a1, b1] ∈ Z1 und Z ∩ [a2, b2] ∈ Z2,wobei
L(γ1 ⊕ γ2,Z) = L(γ1,Z∩ [a1, b1]) + L(γ2,Z∩ [a2, b2]) .
Wegen Z j = {Z ∩ [a j, b j] : Z ∈ ZA} gilt für j = 1, 2 auch
`(γ j) = supZ∈ZA
L(γ j,Z∩ [a j, b j]) = limZ∈ZA
L(γ j,Z∩ [a j, b j]) .
Wegen 5 folgt
`(γ1 ⊕ γ2) = limZ∈ZA
L(γ1 ⊕ γ2,Z)
= limZ∈ZA
L(γ1,Z∩ [a1, b1]) + limZ∈ZA
L(γ2,Z∩ [a2, b2])
= `(γ1) + `(γ2)
in dem Sinn, dass die linke Seite genau dann endlich ist, wenn die rechte Seiteendlich ist, also wenn `(γ1) < +∞ und `(γ2) < +∞.
7. SeiZ eine Zerlegung von [a, b], und betrachte den in (11.1) erwähnten Polygonzugp : [0, n(Z)]→ Rn,
p(t) = γ(ξ j−1) +t − ξ j−1
ξ j − ξ j−1
(γ(ξ j) − γ(ξ j−1)
), t ∈ [ξ j−1, ξ j] . (11.4)
Da dieser Weg eine Zusammensetzung von geraden Strecken – genauer eine Zusam-mensetzung von zu geraden Strecken äquivalenten Wegen – ist, folgt aus dem letztenPunkt, dass `(p) = L(Z).
11.1.6 Bemerkung. Obwohl sich `(γ) für ein Funktion γ : [a, b]→ R, also im Fall n = 1,nur schwer als Weglänge interpretieren lässt, ist dieser Fall doch von Bedeutung. In derTat sagt man, dass γ : [a, b] → R von beschränkter Variation ist, wenn `(γ) < +∞, undnennt dann `(γ) die Variation der Funktion γ.
11.1.7 Lemma. Für einen rektifizierbaren Weg γ : [a, b]→ Rn ist die reellwertige Funk-tion `(x) := `(γ|[a,x]) auf [a, b] monoton wachsend. Dabei impliziert die Rechtsstetigkeit(Linksstetigkeit, Stetigkeit)2 von γ bei x die Rechtsstetigkeit (Linksstetigkeit, Stetigkeit) von` bei x.
2 Rechtsstetig bedeutet lims→x+ `(s) = `(x) und linksstetig lims→x− `(s) = `(x).

11.1 Wege 365
Beweis. x 7→ `(γ|[a,x]) ist offensichtlich monoton wachsend; vgl. Fakta 11.1.5, 6. Sei γ ineinem Punkt x ∈ [a, b) rechtsstetig. Somit gibt es zu gegebenem ε > 0 ein δ > 0, sodass‖γ(x) − γ(s)‖2 < ε für alle s ∈ [x, x + δ].Wegen `(γ|[x,b]) ≤ `(γ) < +∞ gibt es zu gegebenem ε > 0 eine Zerlegung Z0 von [x, b],sodass
`(γ|[x,b]) − ε < L(γ|[x,b],Z0) ≤ `(γ|[x,b]) .
Da L(Z) monoton vonZ abhängt, können wirZ0 so wählen, dass die erste Stützstelle ξrechts von x einen Abstand zu x kleiner oder gleich δ hat.Offenbar ist Z0 ∩ [ξ, b] eine Zerlegung von [ξ, b], wobei L(γ|[ξ,b],Z0 ∩ [ξ, b]) =
L(γ|[x,b],Z0) − ‖γ(ξ) − γ(x)‖2. Also gilt
L(γ|[x,b],Z0) − ‖γ(ξ) − γ(x)‖2 ≤ `(γ|[ξ,b]) ,
und daher
`(γ|[x,ξ]) ≤ `(γ|[x,ξ]) +(`(γ|[ξ,b]) − L(γ|[x,b],Z0) + ‖γ(ξ) − γ(x)‖2
)
= ‖γ(ξ) − γ(x)‖2 + `(γ|[x,b]) − L(γ|[x,b],Z0) < 2ε .
Also ist `(γ|[x,ξ]) < 2ε. Wegen der Monotonie gilt auch `(γ|[a,s]) − `(γ|[a,x]) = `(γ|[x,s]) ≤`(γ|[x,ξ]) < 2ε für alle s ∈ [x, ξ].Die Linksstetigkeit zeigt man analog. q
Konkret ausrechnen lässt sich die Weglänge für stetig differenzierbare Wege.
11.1.8 Satz. Für γ ∈ C1[a, b] ist γ immer rektifizierbar, und `(x) ist differenzierbar mit derAbleitung ‖γ′(x)‖2. Insbesondere gilt
`(γ) =
∫ b
a‖γ′(x)‖2 dx .
Beweis. Aus dem Hauptsatz der Differential- und Integralrechnung und (9.12) erhält man
‖γ(ξ j) − γ(ξ j−1)‖2 =
∥∥∥∥∥∥
∫ ξ j
ξ j−1
γ′(t) dt
∥∥∥∥∥∥2
≤∫ ξ j
ξ j−1
‖γ′(t)‖2 dt .
Aufsummieren über alle j = 1, . . . , n(Z) ergibt L(Z) ≤∫ b
a‖γ′(t)‖2 dt für jede Zerlegung
Z von [a, b]. Also gilt `(γ) ≤∫ b
a‖γ′(t)‖2 dt.
Wegen (11.3) und der eben bewiesenen Ungleichung erhalten wir für a ≤ x < y ≤ b
‖γ(y) − γ(x)‖2 ≤ `(γ|[x,y]) ≤∫ y
x‖γ′(t)‖2 dt .
Dividiert man diese Ungleichung durch (y − x) und lässt x → y streben, so konvergiertdie linke und die rechte Seite gegen ‖γ′(y)‖2, und somit auch der Ausdruck `(y)−`(x)
y−x inder Mitte. Also gilt `′(y)− = ‖γ′(y)‖2. Lässt man y → x streben, so sieht man genauso`′(x)+ = ‖γ′(x)‖2. Insgesamt folgt `′(x) = ‖γ′(x)‖2 für alle x ∈ [a, b], wobei wir an denRändern die jeweiligen einseitigen Grenzwerte meinen. q

366 11 Wegintegrale
11.1.9 Definition. Eine Abbildung f : [a, b]→ X mit einem Banachraum X heißt stück-weise stetig differenzierbar , falls es eine Zerlegung a = t0 < · · · < tn = b von [a, b] gibt,sodass jede Einschränkung f |(t j−1,t j) eine stetig differenzierbare Fortsetzung auf [t j−1, t j] hat.
Die Funktion γ : [a, b]→ Rn ist offenbar stetig und stückweise stetig differenzierbar (vgl.Definition 11.1.9), wenn es eine ZerlegungZ = {ξ j}n(Z)
j=0 gibt, sodass γ|[ξ j−1,ξ j] ∈ C1[ξ j−1, ξ j]für j = 1, . . . , n(Z). Wendet man Satz 11.1.8 insgesamt n(Z)-mal auf γ|[ξ j−1,ξ j], j =
1, . . . , n(Z) an, so erhalten wir
11.1.10 Korollar. Ist γ : [a, b]→ Rn ein stetiger und stückweise stetig differenzierbarerWeg, so ist dieser rektifizierbar mit `(γ) =
∫ b
a‖γ′(x)‖2 dx.
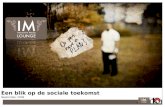
11.1.11 Beispiel. Man betrachte den Weg γ : [0, 2π]→ R2 definiert durch
γ(s) =
(cos ssin s
);
siehe Definition 6.9.11, Beispiel 10.1.10. Für ein t ∈ [0, 2π] gilt gemäß Satz 11.1.8
`(γ|[0,t]) =
∫ t
0
∥∥∥∥∥∥
(− sin scos s
) ∥∥∥∥∥∥2
ds =
∫ t
0
√sin2 s + cos2 s ds = t .
t
−1 1
sin t
cos t
γ(t) ' exp(it)
0
Also ist t genau die Weglängedes Bogens γ|[0,t].
Das erklärt, warum man für ein w ∈ C ' R2 dargestellt in Polarkoordinaten (sieheDefinition 6.9.11), w = r exp(it) = r(cos t + i sin t), die Zahl t auch als Bogenlängebezeichnet.
11.1.12 Bemerkung. Ist γ : [a, b]→ Rn ein rektifizierbarer und stetiger Weg, so wissenwir nun, dass ` das Intervall [a, b] monoton wachsend und surjektiv auf [0, `(γ)] abbildet.Für injektives und daher bijektives ` : [a, b]→ [0, `(γ)] ist β = γ◦`−1 ein zu γ äquivalenterWeg. β hat die spezielle Eigenschaft, dass für alle t ∈ [0, `(γ)] die Länge von β|[0,t] genau tist.Ist ` nicht injektiv, so kann man für t ∈ [0, `(γ)], β(t) := γ(x) setzen, wobei x eine Zahl aus[a, b] ist, sodass `(x) = t. Für `(x1) = t = `(x2) mit x1 < x2 hat γ|[x1,x2] Weglänge Null undist somit konstant, daher γ(x1) = γ(x2). Infolge ist β wohldefiniert, wobei γ = β ◦ `. Mitder Kompaktheit von [0, `(γ)] folgert man aus γ = β ◦ ` leicht die Stetigkeit von β.Also ist β auch in diesem Fall ein zu γ in einem allgemeineren Sinn äquivalenter Weg,sodass die Länge des Weges β|[0,t] genau t ist.

11.2 Wegintegrale 367
11.1.13 Bemerkung (*). Bisher haben wir bei der Behandlung von Wegen und Weglängennirgends verwendet, dass γ in den Rn mit der ‖.‖2-Norm hinein abbildet. Wir haben dieeuklidische Norm nur verwendet, weil sie dem als natürlich empfundenen Längenbegriffentspricht.In der Tat kann man genauso `(γ) definieren, wenn γ eine beliebige Funktion von [a, b]in einen Banachraum (X, ‖.‖) ist. Es gelten dann dieselben Eigenschaften, die wir ebenaufgezählt haben. Ist hier `(γ) < +∞, so spricht man von γ als einer Funktion vonbeschränkter Variation.Äquivalente Normen ‖.‖ und |‖.‖|, also α‖.‖ ≤ |‖.‖| ≤ β‖.‖, induzieren zwar verschiedeneLängenbegriffe, aber diese sind dennoch vergleichbar:
α`‖.‖(γ) ≤ `|‖.‖|(γ) ≤ β`‖.‖(γ) .
Versieht man etwa Rn mit der Norm ‖.‖∞ oder ‖.‖1, so erhält man insbesondere für ein unddenselben Weg verschiedene Längenbegriffe.
11.2 Wegintegrale11.2.1 Beispiel. Wir betrachten ein Objekt im Gravitationsfeld einer Punktmasse, undwollen die Arbeit berechnen, die verrichtet wird wenn man das Objekt von einer Positionzu einer anderen verschiebt. Dabei denken wir uns diese Punktmasse im Nullvektor desR3.Das Newtonsche Gravitationsgesetz besagt, dass sich die Gravitationskraft umgekehrtproportional zum Quadrat ihres Abstandes r zur Punktmasse verhält – also durch C 1
r2
mit einer Konstante C berechnet werden kann. Vernachlässigen wir diese Konstante, undzerlegt man die Kraft, die auf einen Punkt x = (ξ, η, ζ)T ∈ R3 wirkt, in ihre Komponenten,so erhält man den Kraftvektor
F(x) = − 1‖x‖32
ξηζ
.
Verschiebt man nun einen Punkt P von x zu einer sehr nahen Position x + h, so ist dieArbeit, die verrichtet wird, wegen der Formel Arbeit = Kraft ×Weg ungefähr gleich
−(F(x), h)
= −F(x)T h .
Sei nun P ein Punkt in der Position x0, und werde P längs eines Weges γ : [0, 1]→ R3 indie Position x1 verschoben; also γ(0) = x0 und γ(1) = x1. Weiters sei vorausgesetzt, dass γhinreichend glatt ist – etwa stetig und stückweise stetig differenzierbar.Wir zerlegen die Kurve in kleine Abschnitte, indem wir 0 = t0 < t1 < t2 < . . . < tn−1 <tn = 1 nehmen, und γ durch den Polygonzug mit den Ecken in γ(ti) approximiert. Dieverrichtete Arbeit ω ist dann ungefähr
ω ≈n∑
i=1
−F(γ(ti))T (γ(ti) − γ(ti−1)
).

368 11 Wegintegrale
Wir werden unten sehen, dass dieser Ausdruck konvergiert, wenn man die Approximationimmer genauer macht. Für diesen Grenzwert werden wir
∫
γ
−F(x)T dx ,
schreiben, und ihn das Wegintegral des Vektorfeldes φ = −FT längs des Weges γ nennen.
Mathematisch lässt sich die Situation aus Beispiel 11.2.1 dadurch fassen, dass man einsogenanntes Vektorfeld gegeben hat. Das ist eine Abbildung φ : D→ L(Rn, X) von einerTeilmenge D ⊆ Rn in die Menge aller linearen3 Abbildungen von Rn in einen BanachraumX. Oft gilt, so wie in Beispiel 11.2.1, X = R.Ist nun γ : [a, b]→ D ⊆ Rn ein Weg, so entspricht die oben erwähnte Approximation derArbeit bei gegebener Riemann-Zerlegung R =
((ξ j)
n(R)j=0 ; (α j)
n(R)j=1
)der Summe
W(R) :=n(R)∑
j=1
φ(γ(α j)
) (γ(ξ j) − γ(ξ j−1)
). (11.5)
11.2.2 Definition. Konvergiert das Netz(W(R)
)R∈R in X, so nennen wir seinen Grenzwert
∫
γ
φ(x) dx := lim|R|→0
W(R)
das Wegintegral von φ längs des Weges γ.Für f : [a, b]→ L(Rn, X), g : [a, b]→ Rn und R ∈ R setzen wir zudem
P(R) :=n(R)∑
j=1
f (α j)(g(ξ j) − g(ξ j−1)
).
Das Riemann-Stieltjes-Integral∫ b
af dg ist definiert als limR∈R P(R), falls dieser Limes in
X existiert.
Wegintegrale sind spezielle Riemann-Stieltjes-Integrale, da P(R) = W(R) und in Folge∫ b
af dg =
∫γφ(x) dx, wenn g = γ und f = φ ◦ γ.
11.2.3 Fakta.
1. Ist θ : [c, d] → D ⊆ Rn ein Weg und γ = θ ◦ β : [a, b] → D ein zu θ äquivalenterWeg mit einer streng monoton wachsenden Bijektion β : [a, b]→ [c, d]. Gemäß Satz6.3.3 sind die stetigen Abbildungen β und β−1 sogar gleichmäßig stetig.
Für eine Riemann-Zerlegung R von [a, b] bezeichne im Folgenden Wγ(R) die Wegs-umme von φ längs γ, und für eine Riemann-Zerlegung R′ von [c, d] bezeichneWθ(R′) die Wegsumme von φ längs θ
3 Wegen Beispiel 9.2.10 sind diese automatisch beschränkt, wenn wir Rn mit ‖.‖1, ‖.‖2 oder ‖.‖∞ versehen.

11.2 Wegintegrale 369
Ist R =((ξ j)
n(R)j=0 ; (α j)
n(R)j=1
)eine Riemann-Zerlegung von [a, b], so ist β(R) :=((
β(ξ j))n(R)
j=0 ;(β(α j)
)n(R)j=1
)eine solche von [c, d] und umgekehrt, wobei Wθ(β(R)) =
Wγ(R).
Wegen der gleichmäßigen Stetigkeit gibt es dabei zu jeder Riemann-Zerlegung R′0von [c, d] ein δ > 0, sodass für jede Riemann-Zerlegung R von [a, b] aus |R| ≤ δ auch|β(R)| ≤ |R′0| folgt. Gemäß Definition 5.3.6 ist somit
(Wγ(R)
)R∈R =
(Wθ(β(R))
)R∈R
ein Teilnetz von(Wθ(R′))R′∈R′ . Weil auch β−1 gleichmäßig stetig ist, gilt auch die
Umkehrung. Wegen Lemma 5.3.7 erhalten wir∫
θ
φ(x) dx =
∫
γ
φ(x) dx
in dem Sinne, dass wenn eines dieser Integrale existiert, dann auch das andereexistiert und diese übereinstimmen.
Ist γ− der in die Gegenrichtung durchlaufene Weg, so entsprechen sich die Riemann-Summen auch bijektiv, wobei sich die korrespondierenden Summen W(R) nur imVorzeichen unterscheiden, und somit
∫γ− φ(x) dx = −
∫γφ(x) dx gilt.
2. Ist unser Weg rektifizierbar und stetig, und ist φ stetig, so existiert das Integral.
Das folgt aus der allgemeineren Tatsache, dass∫ b
af dg existiert, falls f stetig auf
[a, b] und g rektifizierbar ist. Der Beweis für diese Tatsache ist ähnlich, wie derBeweis für die Riemann-Integrierbarkeit stetiger Funktionen mit Hilfe des Cauchy-Kriteriums.
Beweis. Seien R1 =((ξ j)
n(R1)j=0 ; (α j)
n(R1)j=1
)und R =
((η j)
n(R)j=0 ; (β j)
n(R)j=1
)zwei Riemann-
Zerlegungen von [a, b], sodass die Stützstellen von R die von R1 umfassen.
Ist j ∈ {1, . . . , n(R1)}, so gibt es Indizes k( j − 1) < k( j), sodass
ξ j−1 = ηk( j−1) < ηk( j−1)+1 < · · · < ηk( j)−1 <︸ ︷︷ ︸k( j)−k( j−1)−1 viele
ηk( j) = ξ j .
Wegen g(ξ j) − g(ξ j−1) =∑k( j)
k=k( j−1)+1 g(ηk) − g(ηk−1) gilt
‖P(R) − P(R1)‖ ≤n(R1)∑
j=1
∥∥∥∥∥∥∥f (α j)
(g(ξ j) − g(ξ j−1)
) −k( j)∑
k=k( j−1)+1
f (βk)(g(ηk) − g(ηk−1)
)∥∥∥∥∥∥∥
≤n(R1)∑
j=1
k( j)∑
k=k( j−1)+1
‖ f (α j) − f (βk)‖ · ‖g(ηk) − g(ηk−1)‖2 .
Dabei ist ‖ f (α j) − f (βk)‖ die Abbildungsnorm von f (α j) − f (βk) ∈ L(Rn, X) =
Lb(Rn, X), wenn Rn mit der euklidischen Norm versehen wird.

370 11 Wegintegrale
Wegen |α j − βk| ≤ (ξ j − ξ j−1) ≤ |R1| für k ∈ {k( j − 1) + 1, . . . , k( j)} folgt
‖P(R) − P(R1)‖ ≤n(R)∑
k=1
ρ(|R1|) · ‖g(ηk) − g(ηk−1)‖2 ≤ ρ(|R1|) · `(g) , (11.6)
wobei ρ(δ) := sups,t∈[a,b],|s−t|≤δ ‖ f (s) − f (t)‖.Sind nun R1 und R2 zwei beliebige Riemann-Zerlegungen von [a, b] und wählt manR, sodass die Stützstellen von R sowohl die von R1 also auch die von R2 umfasst, sofolgt aus (11.6) je einmal angewandt auf R1 und auf R2, der Dreiecksungleichungsowie der Monotonie von ρ
‖P(R1) − P(R2)‖ ≤ 2ρ(
max(|R1|, |R2|)) · `(g) .
Wegen der gleichmäßigen Stetigkeit von f gilt limδ→0 ρ(δ) = 0, woraus folgt, dass(P(R)
)R∈R ein Cauchy-Netz und daher konvergent ist. q
3. Als Grenzwert von Netzen mit Werten im Banachraum X erfüllen Wegintegrale(µ, ν ∈ R): ∫
γ
(µφ(x) + νψ(x)) dx = µ
∫
γ
φ(x) dx + ν
∫
γ
ψ(x) dx
Entsprechend sind Riemann-Stieltjes-Integrale linear nicht nur in f , sondern auch ing.
4. Sind γ1 : [a1, b1]→ D, γ2 : [a2, b2]→ D zwei stetige und rektifizierbare Wege mitb1 = a2 und γ1(b1) = γ2(a2), und ist φ : D→ L(Rn, X) stetig, dann gilt
∫
γ1⊕γ2
φ(x) dx =
∫
γ1
φ(x) dx +
∫
γ2
φ(x) dx . (11.7)
Allgemeiner gilt für ein b ∈ (a, c), ein stetiges f : [a, c] → L(Rn, X), und einrektifizierbares g : [a, c]→ Rn, dass
∫ c
af dg =
∫ b
af dg +
∫ c
bf dg .
Beweis. Die Voraussetzungen gewährleisten, dass alle Integrale existieren. Wirwählen zu gegebenem ε > 0 ein reelles δ > 0 so klein, dass ‖P(R1) −
∫ b
af dg‖ < ε,
‖P(R2) −∫ c
bf dg‖ < ε und ‖P(R) −
∫ c
af dg‖ < ε für jede Riemann-Zerlegung R1
von [a, b], jede Riemann-Zerlegung R2 von [b, c] und jede Riemann-Zerlegung Rvon [a, c] mit |R1|, |R2|, |R| < δ.Sind R1 und R2 zwei beliebige Riemann-Zerlegungen von [a, b] bzw. [b, c] mit|R1|, |R2| < δ, so sei R jene Riemann-Zerlegungen von [a, c], deren Stütz- und

11.2 Wegintegrale 371
Zwischenstellen genau jene von R1 und R2 umfasst. Dann gilt |R| < δ und P(R) =
P(R1) + P(R2). Somit folgt aus der Dreiecksungleichung∥∥∥∥∥∥
∫ b
af dg +
∫ c
bf dg −
∫ c
af dg
∥∥∥∥∥∥ ≤
∥∥∥∥∥∥P(R1) −∫ b
af dg
∥∥∥∥∥∥ +
∥∥∥∥∥P(R2) −∫ c
bf dg
∥∥∥∥∥ +
∥∥∥∥∥P(R) −∫ c
af dg
∥∥∥∥∥ < 3ε .
Da ε > 0 beliebig war, gilt die behauptete Gleichheit. q
5. Es gilt
‖P(R)‖ ≤n(R)∑
j=1
‖ f (α j)‖ · ‖g(ξ j) − g(ξ j−1)‖2
≤ supt∈[a,b]
‖ f (t)‖n(R)∑
j=1
‖g(ξ j) − g(ξ j−1)‖2
≤ supt∈[a,b]
‖ f (t)‖ · `(g) .
Daraus erkennt man auch, dass für konstantes g das Riemann-Stieltjes-Integralexistiert und verschwindet. Entsprechend verschwindet das Wegintegral über einenkonstanten Weg.
Existiert das Riemann-Stieltjes-Integral, so ist seine Norm kleiner oder gleichsupt∈[a,b] ‖ f (t)‖ · `(g). Existiert das Wegintegral, so gilt entsprechend
∥∥∥∥∥∥
∫
γ
φ(x) dx
∥∥∥∥∥∥ ≤ supt∈[a,b]
‖φ ◦ γ(t)‖ · `(γ) . (11.8)
11.2.4 Bemerkung. Die Stetigkeit eines Vektorfeldes φ : D→ L(Rn, X) = Lb(Rn, X) mitD ⊆ Rn ist äquivalent zur Stetigkeit der Funktion x 7→ φ(x)e j, j = 1, . . . , n, wie manunmittelbar aus
maxj=1,...,n
‖φ(x)e j − φ(y)e j‖ ≤ ‖φ(x) − φ(y)‖ = supv∈Rn,‖v‖2=1
‖(φ(x) − φ(y))v‖X
≤n∑
j=1
‖φ(x)e j − φ(y)e j‖
erkennt.
Zur Berechnung konkreter Riemann-Stieltjes-Integrale bzw. Wegintegrale dient am bestenfolgender Satz.

372 11 Wegintegrale
11.2.5 Satz. Für g ∈ C1[a, b] und f ∈ C[a, b] gilt∫ b
af dg =
∫ b
af (t) g′(t) dt .
Insbesondere folgt für γ ∈ C1[a, b] und stetiges φ∫
γ
φ(x) dx =
∫ b
aφ(γ(t)
)γ′(t) dt .
Dasselbe gilt für stetige und stückweise stetig differenzierbare Wege g bzw. γ, wobei wirin diesem Zusammenhang g′(t) := 0 bzw. γ′(t) := 0 setzen, falls t einer der endlich vielenPunkte aus [a, b] ist, wo g bzw. γ nicht differenzierbar ist.
Beweis. Aus dem Hauptsatz der Differential- und Integralrechnung erhalten wir für R ∈ R
P(R) =
n(R)∑
j=1
f (α j)(g(ξ j) − g(ξ j−1)
)=
n(R)∑
j=1
f (α j)∫ ξ j
ξ j−1
g′(t) dt =
∫ b
afR(t) g′(t) dt ,
wobei fR(t) die stückweise konstante Funktion mit fR(t) = f (α j), t ∈ [ξ j−1, ξ j), j =
1, . . . , n(R), und fR(b) = f (αn(R)) ist. Für t ∈ [ξ j−1, ξ j), 1 ≤ j < n(R), bzw. für t ∈[ξn(R)−1, ξn(R)] haben wir die Abschätzung
‖ fR(t) g′(t) − f (t) g′(t)‖ ≤ ‖ fR(t) − f (t)‖ · ‖g′(t)‖2= ‖ f (α j) − f (t)‖ · ‖g′(t)‖2 ≤ ρ(|R|) · max
s∈[a,b]‖g′(s)‖2 ,
wobei ρ(δ) := sups,t∈[a,b],|s−t|≤δ ‖ f (s) − f (t)‖. Infolge konvergiert das Netz ( fR(.) g′(.))R∈Rvon Funktionen gleichmäßig auf [a, b] gegen f (.) g′(.). Gemäß Satz 8.7.2 erhalten wir
limR∈R
P(R) = limR∈R
∫ b
afR(t) g′(t) dt =
∫ b
alimR∈R
fR(t) g′(t) dt =
∫ b
af (t) g′(t) dt .
Für stetige und stückweise stetig differenzierbare Kurven folgt die Behauptung aus demgerade Bewiesenen und Fakta 11.2.3, 4. q
11.2.6 Bemerkung. Ist X = Rm, so stellt man φ : D → L(Rn, X) meist als m × n-Matrixdar. Sind γ j(t) die Komponenten unseres Weges, so berechnet man das Wegintegral durch
∫ b
a
φ11(γ(t)) · · · φ1n(γ(t))...
...φm1(γ(t)) · · · φmn(γ(t))
γ′1(t)...
γ′n(t)
dt .
11.2.7 Bemerkung (*). Wie im Abschnitt über Wege ist bisher auch nirgends eingegangen,dass g bzw. γ in den (Rn, ‖.‖2) hinein abbildet.Die obigen Resultate samt Beweise bleiben gültig, wenn g bzw. γ das Intervall [a, b] ineine Menge D ⊆ Y hinein – Y ist Banachraum – abbilden, und f : [a, b]→ Lb(Y, X) bzw.φ : D → Lb(Y, X) jedem t ∈ [a, b] bzw. y ∈ D eine beschränkte lineare Abbildung von Ynach X zuordnet.

11.3 Offene Mengen in Rn und Gebiete 373
11.3 Offene Mengen in Rn und GebieteEhe wir uns weiter mit Vektorfeldern beschäftigen, wollen wir uns die Struktur von offenenTeilmengen des Rn anschauen. Dazu sei zunächst an den Begriff einer zusammenhängendenTeilmenge E eines metrischen Raumes aus Definition 6.2.2 erinnert. E heißt zusammenhän-gend, wenn man E nicht als Vereinigung zweier nichtleerer getrennter Mengen schreibenkann. Dabei nennt man A und B getrennt, wenn c(A) ∩ B = A ∩ c(B) = ∅.11.3.1 Lemma. Ist (Ei)i∈I eine Familie bestehend aus zusammenhängenden Teilmengeneines metrischen Raumes, sodass für ein gewisses k ∈ I und allen i ∈ I die Mengen Ek undEi nicht getrennt sind4, so ist auch E :=
⋃i∈I Ei zusammenhängend.
Beweis. Angenommen es gilt E = A∪̇B mit getrennten Mengen A und B. Dann folgtEi = (A ∩ Ei)∪̇(B ∩ Ei) für jedes i ∈ I. Wegen c(A ∩ Ei) ∩ (B ∩ Ei) ⊆ c(A) ∩ B = ∅und (A ∩ Ei) ∩ c(B ∩ Ei) ⊆ A ∩ c(B) = ∅ sind auch A ∩ Ei und B ∩ Ei getrennt. Da Ei
zusammenhängend ist, muss eine dieser Mengen leer sein; also Ei ⊆ A oder Ei ⊆ B.Wir wählen die Bezeichnung, sodass Ek ⊆ A. Im Fall Ei ⊆ B für nur ein i ∈ I wären Ek
und Ei im Widerspruch zur Voraussetzung getrennt. Somit muss E ganz in A enthaltensein, und infolge B = ∅. q
11.3.2 Definition. Offene und zusammenhängende Teilmengen von Rn heißen Gebiete.
Die Eigenschaft Gebiet zu sein, lässt sich mit Hilfe von stetigen Wegen charakterisieren.
11.3.3 Lemma. Für ein offenes ∅ , D ⊆ Rn sind folgende Aussagen äquivalent.
(i) D ist zusammenhängend, also ein Gebiet.
(ii) Je zwei Punkte x, y aus D sind durch einen stetigen Weg in D verbindbar5.
(iii) Je zwei Punkte aus D sind durch einen stetigen und stückweise stetig differenzierbarenWeg in D verbindbar.
(iv) Je zwei Punkte aus D sind durch einen Polygonzug in D verbindbar.
(v) Je zwei Punkte aus D sind durch einen achsenparallelen6 Polygonzug in D verbindbar.
Beweis. Die Schlüsse (v)⇒ (iv), (iv)⇒ (iii) und (iii)⇒ (ii) sind offensichtlich richtig.Gelte nun (ii) und sei x irgendein fester Punkt aus D. Zu jedem y ∈ D gibt es einen stetigenWeg γy : [ay, by]→ D mit γy(ay) = x und γy(by) = y. Es folgt
D =⋃
y∈D
{y} ⊆⋃
y∈D
γy([ay, by]) ⊆ D .
4 Diese Voraussetzung ist sicher dann erfüllt, wenn Ek mit allen Ei einen nichtleeren Schnitt hat.5 Das bedeutet, dass es einen stetigen Weg γ : [a, b]→ D mit γ(a) = x und γ(b) = y gibt.6 Das ist ein Polygonzug −−−→x0x1,
−−−→x1x2, . . . ,−−−−−−→xm−1xm, wo x j − x j−1 ein skalares Vielfaches eines gewissen
kanonischen Basisvektors ei( j) für j = 1, . . . ,m ist.

374 11 Wegintegrale
Also ist D die Vereinigung der nach Proposition 6.2.4 zusammenhängenden Mengenγy([ay, by]), y ∈ D. Nach unserer Wahl von γy haben diese Mengen zumindest den Punkt xgemein. Nach Lemma 11.3.1 ist D zusammenhängend; also gilt (i).Sei nun D zusammenhängend und x ∈ D wieder fest. Wir bezeichnen mit A die Menge allerPunkte y ∈ D, die mit x durch einen achsenparallelen Polygonzug in D verbindbar sind.Da −→xx auch ein solcher ist, gilt x ∈ A, also A , ∅. Klarerweise ist B := D \ A die Mengealler y ∈ D, die mit x nicht durch einen achsenparallelen Polygonzug in D verbindbar sind.Sei y ∈ A und δ > 0 so klein, dass Uδ(y) – definiert bezüglich der ‖.‖∞-Norm auf Rn – ganzin D enthalten ist. Für beliebiges z ∈ Uδ(y) gilt z = y+λ1e1 + · · ·+λnen mit |λ1|, . . . , |λn| < δ.Ist −−−→x0x1, . . . ,
−−−−−→xm−1xm ein in D verlaufender, achsenparalleler Polygonzug von x = x0 nachy = xm, so verläuft der achsenparalleler Polygonzug
−−−→x0x1, . . . ,−−−−−→xm−1xm,
−−−−−−−−−−→y (y + λ1e1), . . . ,
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−→(y + λ1e1 + . . . λn−1en−1) (y + λ1e1 + . . . λnen)︸ ︷︷ ︸
verläuft in Uδ(y)
von x nach z ebenfalls in D. Also gilt z ∈ A, und infolge Uδ(y) ⊆ A. Wegen A∩ B = ∅ kanny kein Häufungspunkt von B sein, und insgesamt erhalten wir A ∩ c(B) = ∅.Sei nun y ∈ B und δ > 0 so klein, dass Uδ(y) ⊆ D. Läge ein z = y+λ1e1 + · · ·+λnen ∈ Uδ(y)in A mit einem achsenparalleler Polygonzug −−−→x0x1, . . . ,
−−−−−→xm−1xm von x = x0 nach z = xm inD, so wäre
−−−→x0x1, . . . ,−−−−−→xm−1xm,
−−−−−−−−−−−−−−−−−−−−−−−→z (y + λ1e1 + . . . λn−1en−1), . . . ,
−−−−−−−−−−→(y + λ1e1) y︸ ︷︷ ︸
verläuft in Uδ(y)
ein achsenparalleler Polygonzug von x nach y in D, und daher y ∈ A. Dieser Widerspruchzeigt z ∈ B, und somit Uδ(y) ⊆ B. Wegen A ∩ B = ∅ kann y kein Häufungspunkt von Asein, und wir erhalten auch c(A) ∩ B = ∅.Da D zusammenhängend ist, und da A , ∅, muss B = ∅ bzw. D = A, was aber genaubedeutet, dass alle Punkte aus D mit x durch einen achsenparallelen Polygonzug verbindbarsind. Klarerweise sind dann auch zwei beliebige Punkte aus D durch einen achsenparallelenPolygonzug – zumindest via x – verbindbar, und wir haben (v) nachgewiesen. q
11.3.4 Beispiel. Ist D ⊆ Rn offen und konvex, so lassen sich je zwei Punkte x, y aus Ddurch die gerade Strecke −→xy verbinden. Gemäß Lemma 11.3.3 ist somit D ein Gebiet.Insbesondere sind alle offenen Kugeln bzgl. jeder möglichen Norm in Rn Gebiete; vgl.Bemerkung 10.1.5.
Um beliebigen offene Teilmengen des Rn eine Struktur geben zu können, benötigen wirfolgendes Lemma.
11.3.5 Lemma. Sei E eine nichtleere Teilmenge eines metrischen Raumes und sei ∼⊆ E×Edie Relation auf E definiert durch
x ∼ y⇔ ∃Z ⊆ E : x, y ∈ Z, Z ist zusammenhängend ,
so ist ∼ eine Äquivalenzrelation auf E. Für ein x ∈ E ist die Äquivalenzklasse [x]∼ diegrößte zusammenhängende Teilmenge von E, die x enthält.

11.4 Gradientenfelder 375
Beweis. Da einpunktige Mengen {x} zusammenhängend sind, folgt die Reflexivität von ∼.Die Symmetrie ist klar. Gilt x ∼ y, y ∼ z, und sind Z1 und Z2 zusammenhängende Mengen,sodass x, y ∈ Z1 und y, z ∈ Z2, so ist nach Lemma 11.3.1 auch Z1 ∪ Z2 zusammenhängend,wobei x, z ∈ Z1 ∪ Z2. Also ist ∼ ein Äquivalenzrelation. Schließlich ergibt für x ∈ E
[x]∼ =⋃
x∈ZZ ist zusammenhängend
Z ,
wegen Lemma 11.3.1 eine zusammenhängende Menge. Offenbar ist diese Menge dannauch die größte zusammenhängende Teilmenge von E, die x enthält. q
11.3.6 Proposition. Für ein offenes ∅ , G ⊆ Rn sind die Äquivalenzklassen [x]∼ bezüglichder Äquivalenzrelation ∼ aus Lemma 11.3.5 angewandt auf E = G Gebiete.Insbesondere, lässt sich G als disjunkte Vereinigung von Gebieten schreiben.
Beweis. Für y ∈ [x]∼ ⊆ G sei ε > 0, sodass Uε(y) ⊆ G. Wegen Lemma 11.3.1 zusammenmit Beispiel 11.3.4 ergibt [x]∼ ∪Uε(y) eine zusammenhängende Menge. Da [x]∼ die größtezusammenhängende Teilmenge von D ist, welche x enthält, folgt [x]∼ ∪ Uε(y) = [x]∼, alsoUε(y) ⊆ [x]∼. Wir haben somit gezeigt, dass [x]∼ offen und daher ein Gebiet ist. q
11.4 GradientenfelderWir wollen eingangs ein mehrdimensionales Analogon der Tatsache
∫ b
af ′(t) dt = f (b) −
f (a) für Wegintegrale herleiten. Dafür sei bemerkt, dass für ein stetig differenzierbares f :D→ X mit offenem D ⊆ Rn und einem Banachraum X die Ableitung d f : D→ L(Rn, X)ein Vektorfeld ist.
11.4.1 Satz. Sei D ⊆ Rn offen, X ein Banachraum und f : D→ X eine stetig differenzierba-re Funktion. Für einen stetigen und stückweise stetig differenzierbaren Weg γ : [a, b]→ Dgilt ∫
γ
d f (x) dx = f(γ(b)
) − f(γ(a)
).
Beweis. Sind a = t0 < t1 < · · · < tl = b, sodass γ|[t j−1,t j] ∈ C1[t j−1, t j], so folgt aus derKettenregel und dem Hauptsatz der Differential- und Integralrechnung, Satz 8.4.5,
∫
γ
d f (x) dx =
∫ b
ad f
(γ(t)
)γ′(t) dt =
∫ b
a( f ◦ γ)′(t) dt
=
l∑
j=1
(f(γ(t j)
) − f(γ(t j−1)
))= f
(γ(b)
) − f(γ(a)
). q
11.4.2 Beispiel. Wir betrachten nochmals Beispiel 11.2.1. Dort war das Vektorfeld φ :R3 \ {0} → L(R3,R) durch φ(x) = 1
‖x‖32(ξ, η, ζ) gegeben. Nun ist aber φ(x) = d f (x), wobei
f (x) = − 1‖x‖2 . Insbesondere berechnet sich die Arbeit, die man verrichten muss, um einen

376 11 Wegintegrale
Punkt P von x0 nach x1 entlang eines stetigen und stückweise stetig differenzierbarenWeges γ zu bewegen, durch
∫
γ
φ(x) dx =1‖x0‖2 −
1‖x1‖2 .
11.4.3 Definition. Vektorfelder φ : D→ L(Rn, X), die Ableitungen d f stetig differenzier-barer Funktionen f : D→ X sind, heißen Gradientenfelder. Jedes stetig differenzierbaref : D→ X mit d f = φ nennt man Stammfunktion von φ.
11.4.4 Korollar. Für ein Gebiet D und ein Gradientenfeld φ : D → L(Rn, X) ist dieStammfunktion f ∈ C1(D) von φ bis auf eine additive Konstante aus X eindeutig.
Beweis. Falls d f1 = φ = d f2 für zwei C1(D)-Funktionen f1, f2, so folgt für beliebigex, y ∈ D aus Satz 11.4.1 angewandt auf 0 = d f1 − d f2 und irgendeinen geeigneten Weg γ :[a, b]→ D mit γ(a) = x und γ(b) = y (vgl. Lemma 11.3.3), dass ( f1 − f2)(x) = ( f1 − f2)(y).Somit ist f1 − f2 auf D konstant. q
11.4.5 Beispiel. Die Tatsache, dass φ ein Gradientenfeld ist, hängt entscheidend vonseinem Definitionsbereich ab D. In der Tat gilt etwa für das Vektorfeld
φ : R2 \ {0} → L(R2,R), φ((x, y)T ) =
( −yx2 + y2 ,
xx2 + y2
)
und den Weg γ : [0, 2π]→ R2, γ(t) = (cos t, sin t)T ,∫
γ
φ(x) dx , 0 .
Wegen γ(0) = γ(2π) erkennen wir aus Satz 11.4.1, dass φ : R2 \ {0} → L(R2,R) keinGradientenfeld sein kann.Macht man den DefinitionsbereichR2\{0} von φ aber kleiner, etwa D = R2\{(x, y)T : x ≤ 0},so ist φ sehr wohl ein Gradientenfeld; vgl. Beispiel 11.4.16.
Die in Satz 11.4.1 angegebene Eigenschaft, dass Wegintegrale über Gradientenfelder nichtvom konkreten Weg abhängen, charakterisiert in der Tat Gradientenfelder; siehe Satz11.4.7. Um das zu zeigen, brauchen wir folgende Begriffsbildung:Zu c, x ∈ Rn und einer Permutation σ von {1, . . . , n}, also einer Bijektion σ : {1, . . . , n} →{1, . . . , n}, sei γσc,x : [0, n]→ Rn der achsenparallele Polygonzug
−−→y0y1,−−→y1y2, . . . ,
−−−−→yn−1yn ,
von c = y0 nach x = yn, wobei wobei
yk := c +
k∑
j=1
(xσ( j) − cσ( j))eσ( j), k = 0, . . . , n .

11.4 Gradientenfelder 377
11.4.6 Lemma. Sei D =∏n
k=1(ak, bk) ⊆ Rn, und φ : D → L(Rn, X) stetig. Falls für einfestes c ∈ D und allen x ∈ D das Wegintegral
∫
γσc,x
φ(v) dv
unabhängig von der Permutation σ : {1, . . . , n} → {1, . . . , n} ist, so stellt
f (x) :=∫
γσc,x
φ(v) dv
eine stetig differenzierbare Funktion f : D→ X mit d f = φ dar.
Beweis. Sei δ > 0, sodass U‖.‖∞δ (x) ⊆ D. Für 0 , |t| < δ, j ∈ {1, . . . , n} und irgendeinerPermutation σ mit σ(n) = j gilt im Falle sgn(t · (x j − c j)) ≥ 0,
γσc,x+te j|[0,n−1+
x j−c jx j−c j+t ] ∼ γσc,x und γσc,x+te j
|[n−1+x j−c j
x j−c j+t ,n] ∼−−−−−−−−→x (x + te j)
und damit ∫
γσc,x+te j
φ(v) dv =
∫
γσc,x
φ(v) dv +
∫−−−−−−−→x (x+te j)
φ(v) dv .
Im Falle sgn(t · (x j − c j)) < 0 gilt
γσc,x|[0,n−1+x j−c j+tx j−c j
]∼ γσc,x+te j
und γσc,x|[n−1+x j−c j+tx j−c j
,n]∼ −−−−−−−−→(x + te j) x
und damit ∫
γσc,x
φ(v) dv =
∫
γσc,x+te j
φ(v) dv +
∫−−−−−−−→(x+te j) x
φ(v) dv .
Also erhalten wir in jedem Fall
f (x + te j) − f (x)t
=1t
∫−−−−−−−→x (x+te j)
φ(v) dv =
∫ 1
0φ(x + tse j) e j ds .
Wegen der Stetigkeit der Funktion φ konvergiert der Integrand für t → 0 gleichmäßig ins ∈ [0, 1] gegen die Konstante φ(x)e j ∈ X. Also folgt ∂ f
∂x j(x) = φ(x)e j; vgl. Satz 8.7.2 bzw.
(9.16). Da dieser Ausdruck für jedes j stetig in x ist, gilt f ∈ C1(D) mit d f = φ. q
11.4.7 Satz. Sei D ⊆ Rn eine offene Menge und sei φ : D→ L(Rn, X) ein Vektorfeld. φ istgenau dann ein Gradientenfeld, wenn φ stetig und derart ist, dass Wegintegrale von φ überachsenparallele Polygonzüge nur von Anfangs- und Endpunkt des Weges abhängen.
Beweis. Für Gradientenfeld folgt besagte Eigenschaft unmittelbar aus Satz 11.4.1.Sei umgekehrt φ : D → L(Rn, X) ein stetiges Vektorfeld, sodass Wegintegrale von φüber achsenparallele Polygonzüge nur von Anfangs- und Endpunkt des Weges abhängen.Gemäß Proposition 11.3.6 können wir D als disjunkte Vereinigung von gewissen Gebieten

378 11 Wegintegrale
θ schreiben. Nun greife man aus jedem solchen Gebiet θ ein festes xθ ∈ θ heraus, unddefiniere für x ∈ θ
f (x) =
∫
ρθx
φ(v) dv ,
wobei ρθx : [a, b]→ θ irgendein achsenparalleler Polygonzug mit ρθx(b) = x und ρθx(a) = xθist; vgl. Lemma 11.3.3. Wegen der vorausgesetzten Wegunabhängigkeit und weil jedesx ∈ D in irgendeinem solchen Gebiet liegt, ist auf diese Art und Weise eine Funktionf : D→ X wohldefiniert.Sei nun c ∈ D, θ das Gebiet mit c ∈ θ und δ > 0, sodass U‖.‖∞δ (c) ⊆ θ. Für x ∈ U‖.‖∞δ (c) giltwegen der Wegunabhängigkeit
f (x) =
∫
ρθc
φ(v) dv +
∫
γσc,x
φ(v) dv .
Gemäß Lemma 11.4.6 ist f auf U‖.‖∞δ (c) stetig differenzierbar mit d f |U‖.‖∞δ (c) = φ|U‖.‖∞δ (c). Dadie stetige Differenzierbarkeit eine lokale Eigenschaft ist, folgt f ∈ C1(D) mit d f = φ. q
11.4.8 Bemerkung. Die Voraussetzung in Satz 11.4.7, dass∫γ1φ(x) dx =
∫γ2φ(x) dx für je
zwei achsenparallele Polygonzüge γ1 und γ2 mit gleichen Anfangs- und Endpunkten, istäquivalent dazu, dass
∫γφ(x) dx = 0 für alle achsenparallele Polygonzüge γ, die geschlos-
sen sind, also deren Endpunkt gleich dem Anfangspunkt ist. Das sieht man leicht, indemman γ = γ̃1 ⊕ (γ̃2−) betrachtet, wobei γ̃ j derart äquivalent zu γ j ist, dass sich γ̃1 ⊕ (γ̃2−)bilden lässt.
Etwas schwächer als Gradientenfeld ist folgender Begriff.
11.4.9 Definition. Sei D ⊆ Rn eine offene Menge und sei φ : D → L(Rn, X) ein stetigesVektorfeld. Dann heißt φ lokales Gradientenfeld, wenn es zu jedem x ∈ D ein offenesD(x) ⊆ D7 mit x ∈ D(x) gibt, sodass φ|D(x) : D(x)→ L(Rn, X) ein Gradientenfeld ist.
Dass die Begriffe lokales Gradientenfeld und Gradientenfeld nicht äquivalent sind, werdenwir in Beispiel 11.4.16 sehen.
11.4.10 Bemerkung. Seien 0 < ρ1 < ρ2 < +∞ zwei Radien, sodass φ|Uρ j (x) : Uρ j(x) →L(Rn, X) für j = 1, 2 ein Gradientenfeld ist – also φ|Uρ j (x) = d f j für f j ∈ C1(Uρ j(x)). Da dieAddition einer Konstanten zu f j daran nichts ändert, können wir zusätzlich f1(x) = 0 =
f2(x) annehmen.Da innerhalb einer Kugel ein Punkt durch eine gerade Strecke mit dem Mittelpunktverbunden werden kann, folgt aus Korollar 11.4.4, dass sich f1 und f2 auf der kleinerenKugel Uρ1(x) nur um eine additive Konstante aus X unterscheiden. Wegen f1(x) = 0 = f2(x)folgt f1 = f2|Uρ1 (x).Ist nun R ⊆ (0,+∞) die Menge aller positiver Zahlen ρ, sodass φ|Uρ(x) immer ein Gra-dientenfeld ist, so gibt es also fρ ∈ C1(Uρ(x)) mit d fρ = φ|Uρ(x), welche Fortsetzungen
7 Klarerweise kann man D(x) kleiner machen und daher immer als ε-Kugel bezüglich der ‖.‖2- oder der‖.‖∞-Norm annehmen.

11.4 Gradientenfelder 379
voneinander sind. Auf⋃
ρ∈R Uρ(x) = Usup R(x) ist somit durch f (y) = fρ(y) mit y ∈ Uρ(x)eine C1 Funktion wohldefiniert, welche offenbar d f = φ|Usup R(x) erfüllt.Insgesamt erkennen wir, dass es für ein lokales Gradientenfeld φ : D→ L(Rn, X) zu jedemx ∈ D ein maximales 0 < ρ ≤ +∞ gibt, sodass Uρ(x) ⊆ D und φ|Uρ(x) ein Gradientenfeldist.
Bei stetig differenzierbaren Vektorfeldern gibt es eine greifbarere Bedingung dafür, dassein Vektorfeld ein lokales Gradientenfeld ist.
11.4.11 Definition. Ein Vektorfeld φ : D→ L(Rn, X) heißt stetig differenzierbar, falls füralle j = 1, . . . , n die Funktionen x 7→ φ(x)e j von D nach X hinein stetig differenzierbarsind.
11.4.12 Bemerkung. Wegen Bemerkung 11.2.4 sind stetig differenzierbare Vektorfelderauch stetig.
11.4.13 Lemma (*). φ : D→ Lb(Rn, X) ist genau dann stetig differenzierbar, wenn φ alsAbbildung von D in den Banachraum Lb(Rn, X), versehen mit der Abbildungsnorm, stetigdifferenzierbar ist.
Beweis. Wegen Satz 10.1.15 ist die stetige Differenzierbarkeit von φ als Abbildung vonD in den Banachraum Lb(Rn, X) äquivalent dazu, dass für i = 1, . . . , n die partiellenAbleitungen ∂
∂xiφ(x) ∈ Lb(Rn, X) für alle x ∈ D existieren und stetig von x abhängen. Da
für j = 1, . . . , n die Abbildung A 7→ Ae j von Lb(Rn, X) nach X linear und beschränkt ist,folgt daraus, dass auch
∂
∂xi(φ(.)e j)(x) ∈ X
existiert und mit ( ∂∂xiφ(x))e j übereinstimmt; vgl. Fakta 9.3.13, 4. Da letztere Funktion stetig
von x abhängt, sind somit für j = 1, . . . , n die Funktionen x 7→ φ(x)e j von D nach X stetigdifferenzierbar.Seien umgekehrt alle diese Funktionen D 3 x 7→ φ(x)e j ∈ X stetig differenzierbar, und seii ∈ {1, . . . , n}. Für jedes feste x ∈ D wird durch
B(x) :
µ1...µn
7→n∑
j=1
µ j∂
∂xi(φ(.)e j)(x)
eine lineare Abbildung von Rn nach X definiert, die gemäß Beispiel 9.2.10, (ii), beschränktist. Wegen
‖B(x) − B(y)‖ = sup‖v‖∞=1
‖(B(x) − B(y))v‖X ≤
n∑
j=1
‖ ∂∂xi
(φ(.)e j)(x) − ∂
∂xi(φ(.)e j)(y)‖
ist B : D→ Lb(Rn, X) stetig. Schließlich ist wegen
‖ 1t(φ(x + tei) − φ(x)
) − B(x) ‖ = sup‖v‖∞=1
∥∥∥∥∥∥
(1t(φ(x + tei) − φ(x)) − B(x)
)v
∥∥∥∥∥∥X
=

380 11 Wegintegrale
sup‖v‖∞=1
∥∥∥∥∥n∑
j=1
µ j
(1t(φ(x + tei)e j − φ(x)e j) − ∂
∂xi(φ(.)e j)(x)
) ∥∥∥∥∥X≤
n∑
j=1
∥∥∥∥∥∥
(1t(φ(x + tei)e j − φ(x)e j) − ∂
∂xi(φ(.)e j)(x)
)∥∥∥∥∥∥X
t→0−→ 0 ,
B(x) nichts anderes als ∂∂xiφ(x). q
Sei nun D ⊆ Rn offen, φ : D→ L(Rn, X) ein stetig differenzierbares Vektorfeld. Angenom-men, φ ist auf einem offenen D(x) ⊆ D mit x ∈ D(x) ⊆ D die Ableitung einer Funktionf : D(x)→ X, also φ = d f . Klarerweise ist dann f ∈ C2(D(x)), und wegen dem Satz vonSchwarz gilt für y ∈ D(x)
∂
∂xiφ(y)e j =
∂2 f∂xi∂x j
(y) =∂2 f∂x j∂xi
(y) =∂
∂x jφ(y)ei .
Wir sehen also, dass∂
∂xiφ(.)e j =
∂
∂x jφ(.)ei für alle i, j ∈ {1, . . . , n} , (11.9)
eine notwendige Bedingung dafür ist, dass φ ein lokales Gradientenfeld ist.Wir wollen als nächstes zeigen, dass (11.9) auch hinreichend dafür ist, dass ein Vektorfeldein lokales Gradientenfeld ist. In der Tat werden wir für ein Vektorfeld φ : D→ L(Rn, X),wobei D ein offener Quaders D =
∏ni=1(ai, bi) ist, aus der Gültigkeit von (11.9) herleiten,
dass φ ein Gradientenfeld auf D ist. Es sei daran erinnert, dass diese offenen Quadertatsächlich offen sind; vgl. Fakta 8.7.8.
11.4.14 Satz. Sei φ : D→ L(Rn, X) ein stetig differenzierbares Vektorfeld.Im Falle D =
∏nk=1(ak, bk) ⊆ Rn folgt aus (11.9), dass φ ein Gradientenfeld ist. Für
beliebiges offenes D ⊆ Rn folgt aus (11.9), dass φ ein lokales Gradientenfeld ist.
Beweis. Sei c ∈ D =∏n
k=1(ak, bk) und sei σ = id{1,...,n} die identische Permutation von{1, . . . , n}. Mit der Notation, die wir vor Lemma 11.4.6 eingeführt haben, ist durch
f (x) :=∫
γσc,x
φ(v) dv
eine Funktion f : D → X wohldefiniert. Für f ∈ C1(D) mit d f = φ, reicht es zu zeigen,dass ∂ f
∂xk(x) = φ(x)ek für alle k = 1, . . . , n und x ∈ D.
Mit (11.7), mit Satz 11.2.5 und mit der Substitution s = (x j − c j)t folgt
f (x) =
n∑
j=1
∫
−−−−−→y j−1 y j
φ(v) dv
=
n∑
j=1
∫ 1
0φ((1 − t)y j−1 + ty j
) (y j − y j−1
)dt
=
n∑
j=1
∫ x j−c j
0φ(y j−1 + se j
)e j ds , (11.10)

11.4 Gradientenfelder 381
wobei yk = c+∑k
j=1(x j−c j)e j. Nun leiten wir diese Gleichung nach xk ab, und werten bei xaus. Da für j < k der Ausdruck y j−1 von xk unabhängig ist, und somit im j-ten Summandenvon (11.10) die Variable xk nicht vorkommt, ist seine Ableitung gleich Null.Für j = k ist y j−1 auch von xk unabhängig. Somit tritt beim k-ten Summanden xk nur in deroberen Integralgrenze auf, weswegen seine Ableitung nach xk übereinstimmt mit
φ(yk−1 + (xk − ck)ek
)ek = φ
(yk
)ek .
Für j > k tritt xk nur im Integranden auf, da dann y j−1 sehr wohl von xk abhängt. WegenKorollar 8.7.12 (siehe auch (9.18)) kann man Integral und ∂
∂xkvertauschen. Also ist die
Ableitung des j-ten Summanden von (11.10) gleich∫ x j−c j
0
∂
∂xkφ(y j−1 + se j) e j ds
und wegen (11.9) weiter gleich∫ x j−c j
0
∂
∂x jφ(y j−1 + se j) ek ds = φ
(y j−1 + (x j − c j)e j
)ek − φ(y j−1)ek
= φ(y j) ek − φ(y j−1) ek .
Somit stimmt die Ableitung von (11.10) nach xk überein mit
∂ f∂xk
(x) = φ(yk) ek +
n∑
j=k+1
(φ(y j) ek − φ(y j−1) ek
)= φ(yn) ek = φ(x) ek .
Ist D ⊆ Rn offen und ist x ∈ D, so gilt für hinreichend kleines ρ > 0, dass U‖.‖∞ρ (x) ⊆ D.Da U‖.‖∞ρ (x) =
∏ni=1(xi − ρ, xi + ρ) ein offener Quader ist, folgt aus (11.9), dass φ|U‖.‖∞ρ (x) ein
Gradientenfeld ist. Also ist φ ein lokales Gradientenfeld. q
11.4.15 Beispiel. Auf D = {(x, y)T ∈ R2 : x , 0, y < π2 + πZ} sei das Vektorfeld
φ : D→ L(R2,R) � R1×2 definiert durch
φ
(xy
)=
(− tan y
x2 + 2xy + x2,1
x cos2 y+ x2 + y2
).
φ ist stetig differenzierbar, wobei
∂
∂yφ
(xy
)e1 = − 1
x2 cos2 y+ 2x =
∂
∂xφ
(xy
)e2 .
Also ist φ nach Satz 11.4.14 ein lokales Gradientenfeld.Da D kein Quader ist, sind wir zu diesem Zeitpunkt weder sicher, ob es sich um einGradientenfeld handelt, noch haben wir die Stammfunktion explizit in der Hand. Um diesezu finden, nehmen wir einmal unbestimmt f : D→ R so an, dass d f = φ; also
∂ f∂x
(xy
)= − tan y
x2 + 2xy + x2 und∂ f∂y
(xy
)=
1x cos2 y
+ x2 + y2 .

382 11 Wegintegrale
Aus der ersten Gleichung folgt
f(xy
)=
∫− tan y
x2 + 2xy + x2 dx + c(y) =tan y
x+ x2y +
x3
3+ c(y) ,
mit einer C2-Funktion c(y), die nur von y abhängt. Nun leiten wir diesen Ausdruck nach yab, verwenden die zweite Gleichung von oben und erhalten
1x cos2 y
+ x2 + c′(y) =∂ f∂y
(xy
)=
1x cos2 y
+ x2 + y2 .
Also muss c(y) von der Gestalt c(y) =y3
3 + c sein. Wir sehen, dass
f(xy
)=
tan yx
+ x2y +x3 + y3
3.
tatsächlich φ = d f erfüllt und somit eine Stammfunktion von φ ist. Insbesondere ist φ aufganz D ein Gradientenfeld.
11.4.16 Beispiel. Für D = R2 \ {0} sei das Vektorfeld φ : R2 \ {0} → L(R2,R) definiertdurch
φ
(xy
)=
( −yx2 + y2 ,
xx2 + y2
).
Man rechnet elementar nach, dass ∂∂yφ
(xy
)e1 = ∂
∂xφ(
xy
)e2 gilt, und dass somit φ ein lokales
Gradientenfeld ist.Wir haben in Beispiel 11.4.5 mit Hilfe eines geeigneten Wegintegrals gezeigt, dass φ :D → L(R2,R) kein Gradientenfeld ist. Wir wollen diese Tatsache hier auf eine andereArt und Weise nochmals verifizieren. Dazu nehmen wir an, dass es doch ein g : D → Rgibt, sodass dg = φ, und leiten daraus einen Widerspruch her. Addieren wir eine geeigneteKonstante, so können wir g((1, 0)T ) = 0 annehmen.Auf die obere Halbebene (−∞,+∞) × (0,+∞) eingeschränkt ist φ gemäß Satz 11.4.14 einGradientenfeld mit Stammfunktion f darauf. Der Ansatz
∂ f∂x
(xy
)=−y
x2 + y2
ergibt durch unbestimmte Integration f ((x, y)T ) = − arctan( x
y
)+ c(y). Nun leiten wir das
nach y ab, und erhalten die Gleichung
xx2 + y2 + c′(y) =
xx2 + y2 ,
also c′(y) = 0, womit c(y) konstant ist. Da gemäß Korollar 11.4.4 die Stammfunktion einesVektorfeldes eindeutig ist, und da g|(−∞,+∞)×(0,+∞) auch eine solche Stammfunktion vonφ|(−∞,+∞)×(0,+∞) ist, folgt
g|(−∞,+∞)×(0,+∞) = − arctan( x
y)
+ c .

11.4 Gradientenfelder 383
Lassen wir in dieser Gleichung (x, y)T ∈ (−∞,+∞) × (0,+∞) gegen (1, 0)T streben, sofolgt 0 = −π2 + c. Lassen wir in obiger Gleichung dann (x, y)T ∈ (−∞,+∞)× (0,+∞) gegen(−1, 0)T streben, so schließen wir auf g((−1, 0)T ) = π
2 + c = π.Auf der unteren Halbebene (−∞,+∞)× (−∞, 0) erhalten wir ganz ähnlich − arctan
( xy
)+ d
als Stammfunktion, und somit
g|(−∞,+∞)×(−∞,0) = − arctan( x
y)
+ d .
Lassen wir hier (x, y)T ∈ (−∞,+∞) × (−∞, 0) gegen (−1, 0)T streben, so konvergiert xy
gegen −∞, wodurch wir π = g((−1, 0)T ) = −π2 + d, also d = 3π2 erhalten. Lassen wir
schließlich (x, y)T ∈ (−∞,+∞) × (−∞, 0) gegen (1, 0)T streben, so folgt der Widerspruch0 = g((1, 0)T ) = π
2 + d = 2π.
11.4.17 Bemerkung (*). Sei I ein reelles Intervall und x : I → Rn eine C1-Funktion mitx(I) ⊆ D für eine gewisse offene Teilmenge D von Rn. Nun genüge x der Differentialglei-chung
n∑
j=1
f j(x(t)
) · x′j(t) = 0, t ∈ I , (11.11)
wobei f1, . . . , fn : D → R alle in C(D) sind. Ziel ist es, mehr über die Funktion x inErfahrung zu bringen.Das geht sicher dann, wenn ( f1, . . . , fn) : D→ L(Rn,R) ein Gradientenfeld ist, also wenn( f1, . . . , fn) = dF für ein F ∈ C1(D). Man nennt (11.11) dann eine exakte Differential-gleichung. In der Tat liest sich in diesem Fall (11.11) wegen der Kettenregel (siehe auchBemerkung 10.1.20) als
(F ◦ x)′(t) = 0, t ∈ I ,
und daher F ◦ x ≡ c für eine gewisse reelle Konstante c.Ist D ein offener Quader und sind die f j alle sogar C1, so ist gemäß Satz 11.4.14
∂
∂xif j =
∂
∂x jfi für alle i, j ∈ {1, . . . , n} ,
eine hinreichende Bedingung dafür, dass (11.11) eine exakte Differentialgleichung ist.Nun kann es sein, dass zwar (11.11) keine exakte Differentialgleichung ist, aber es dennocheine Funktion m : D→ R gibt, sodass die aus (11.11) abgeleitete Differentialgleichung
m(x(t)
) ·n∑
j=1
f j(x(t)
) · x′j(t) =
n∑
j=1
(m · f j)(x(t)
) · x′j(t) = 0, t ∈ I ,
eine solche ist. Dann folgt nämlich auch G ◦ x ≡ c für eine gewisse reelle Konstante c,wobei G eine Stammfunktion des Gradientenfeldes (m · f1, . . . ,m · fn) ist. Eine solcheFunktion m nennt man Integrierenden Faktor.

384 11 Wegintegrale
11.4.18 Beispiel (*). Sei b > 0 und y : (0, b)→ R eine C1-Funktion, die der Differential-gleichung
4x + 3y(x)2 + 2xy(x)y′ = 0 (11.12)
genügt. Um diese Gleichung mit der in Bemerkung 11.4.17 vorgestellten Methode behan-deln zu können, betrachten wir (
x(t)y(t)
)=
(t
y(t)
)
als Abbildung von (0, b) nach (0, b) × R. Dann schreibt sich unsere Gleichung als
f(x(t)y(t)
)· x′(t) + g
(x(t)y(t)
)· y′(t) = 0 , (11.13)
wobei f((x, y)T ) = 4x + 3y2 und g
((x, y)T ) = 2xy. Wegen
∂
∂yf(xy
)= 6y , 2y =
∂
∂xg(xy
)
ist (11.13) nicht exakt. Durch Multiplizieren mit m((x, y)T ) = x2 folgt aus (11.13) aber
m(x(t)y(t)
)· f
(x(t)y(t)
)· x′(t) + m
(x(t)y(t)
)· g
(x(t)y(t)
)· y′(t) = 0 . (11.14)
Wegen∂
∂y(m · f )
(xy
)= 6yx2 = 6x2y =
∂
∂x(m · g)
(xy
)
zusammen mit Satz 11.4.14 ist (11.14) exakt.Man sieht leicht, dass G
((x, y)T ) = x4 + x3y2 eine Stammfunktion von (m · f ,m · g) ist.
Also muss G((x(t), y(t))T ) = c, t ∈ (0, b) für eine Konstante c ∈ R gelten. Das bedeutet
t4 + t3y2(t) = c bzw.y2(t) =
ct3 − t .
Da dieser Ausdruck für alle t ∈ (0, b) nichtnegativ ist, muss c ≥ b4. Wir erhalten
y(x) = ε ·√
cx3 − x, x ∈ (0, b) ,
für gewisse ε ∈ {+1,−1}, c ∈ [b,+∞). Man überprüft auch leicht nach, dass jede derartigeFunktion tatsächlich eine Lösung von (11.12) ist.
11.5 Homotopie und einfacher ZusammenhangEhe wir den wichtigen Satz 11.5.4 beweisen können, brauchen wir noch eine grundlegendeBegriffsbildung.

11.5 Homotopie und einfacher Zusammenhang 385
11.5.1 Definition. Sei D ⊆ Rn offen, und seien γ0, γ1 : [a, b]→ D zwei stetige Wege. Einestetige Abbildung Γ : [a, b] × [c, d]→ D (c, d ∈ R, c < d) mit
Γ(t, c) = γ0(t) und Γ(t, d) = γ1(t) für alle t ∈ [a, b] ,
heißt Homotopie zwischen γ0 und γ1 in D.Haben γ0 und γ1 gleichen Anfangs- und gleichen Endpunkt, also γ0(a) = γ1(a) undγ0(b) = γ1(b), dann heißen diese Wege homotop in D, wenn es eine Homotopie Γ :[a, b] × [c, d]→ D zwischen γ0 und γ1 in D gibt, sodass
Γ|{a}×[c,d] ≡ γ0(a), Γ|{b}×[c,d] ≡ γ0(b) .
Ein Gebiet D ⊆ Rn heißt einfach zusammenhängend, wenn je zwei stetige Wege mitgleichen Anfangs- und gleichen Endpunkten homotop in D sind.
11.5.2 Bemerkung. Mit Γ : [a, b] × [c, d] → D ist auch Γ̂ : [a, b] × [0, 1] → D definiertdurch
Γ̂(t, s) = Γ(t, sd + (1 − s)c) .
eine Homotopie zwischen zwei Wegen, γ0 und γ1. Also kann man für Homotopien immerohne Beschränkung der Allgemeinheit [c, d] = [0, 1] annehmen.
11.5.3 Beispiel. Ist D ⊆ Rn offen, und sind γ0, γ1 : [a, b] → D zwei stetige Wege mitgleichem Anfangs- und gleichem Endpunkt, sodass die Konvexkombinationen
γα(t) := α · γ1(t) + (1 − α) · γ0(t)
für alle α ∈ [0, 1] und alle t ∈ [a, b] in D liegen, so ist Γ(t, α) := γα(t) stetig auf [a, b]×[0, 1].Infolge sind γ0 und γ1 homotop.Insbesondere sind konvexe und offene D einfach zusammenhängende Gebiete; vgl. Beispiel11.3.4.
11.5.4 Satz. Sei D ⊆ Rn offen und sei φ : D→ L(Rn, X) ein lokales Gradientenfeld. Sindγ0, γ1 : [a, b]→ D zwei stetige und stückweise stetig differenzierbare Wege mit gleichenAnfangs- und gleichen Endpunkten, die homotop sind, so gilt
∫
γ0
φ(x) dx =
∫
γ1
φ(x) dx .
Ist D ein einfach zusammenhängendes Gebiet, so ist φ : D → L(Rn, X) genau dann einlokales Gradientenfeld wenn es ein Gradientenfeld ist.
Beweis. Sei Γ : [a, b] × [0, 1]→ D eine Homotopie zwischen γ0 und γ1 wie in Definition11.5.1. Voraussetzungsgemäß gibt es zu jedem x ∈ K := Γ([a, b] × [0, 1]) ein 0 < ρx ≤ +∞mit Uρx(x) ⊆ D8, sodass φ|Uρx (x) ein Gradientenfeld ist. Gemäß Bemerkung 11.4.10 könnenwir die ρx maximal wählen, sodass Uρx(x) ⊆ D und φ|Uρx (x) ein Gradientenfeld ist.
8 Bezüglich ‖.‖∞.

386 11 Wegintegrale
Wäre nun ρ := inf{ρx : x ∈ K} gleich Null, so gäbe es eine Folge (xn)n∈N aus K mitlimn→∞ ρxn = 0. Da K als stetiges Bild einer kompakten Menge kompakt ist, hat diese Folgeeine gegen ein x ∈ K konvergente Teilfolge (xn( j)) j∈N. Für alle hinreichend großen j ∈ N giltdaher xn( j) ∈ U ρx
2(x) und in Folge der Dreiecksungleichung dann auch U ρx
2(xn( j)) ⊆ Uρx(x).
Also ist für alle hinreichend großen j das Vektorfeld φ|U ρx2
(xn( j)) ein Gradientenfeld und
somit ρx2 ≤ ρxn( j) , was aber lim j→∞ ρxn( j) = 0 widerspricht.
Damit haben wir die Existenz eines ρ > 0 gezeigt, sodass für alle x ∈ K immer Uρ(x) ⊆ Dund φ|Uρ(x) ein Gradientenfeld ist. Gemäß Satz 6.3.3 gibt es ein η > 0, sodass
max(|t1 − t2|, |s1 − s2|) < η ⇒ ‖Γ(t1, s1) − Γ(t2, s2)‖∞ < ρ . (11.15)
Seien a = t0 < t1 < · · · < tp = b, 0 = s0 < s1 · · · < sp = 1, sodass für alle j, k = 1, . . . , pdie Ungleichung |t j − t j−1|, |sk − sk−1| < η gilt. Also verlaufen für j, k = 1, . . . , p diePolygonzüge
α jk :=−−−−−−−−−−−−−−−−−−−→Γ(t j−1, sk−1) Γ(t j−1, sk),
−−−−−−−−−−−−−−−−→Γ(t j−1, sk) Γ(t j, sk)
undβ jk :=
−−−−−−−−−−−−−−−−−−−→Γ(t j−1, sk−1) Γ(t j, sk−1),
−−−−−−−−−−−−−−−−→Γ(t j, sk−1) Γ(t j, sk)
ganz in Uρ(Γ(t j, sk)) ⊆ D. Mit Satz 11.4.1 folgt
0 =
∫
α jk
φ(x) dx −∫
β jk
φ(x) dx =
∫−−−−−−−−−−−−−−−−−−−−→Γ(t j−1,sk−1) Γ(t j−1,sk)
φ(x) dx +
∫−−−−−−−−−−−−−−−−→Γ(t j−1,sk) Γ(t j,sk)
φ(x) dx
−∫−−−−−−−−−−−−−−−−−−−−→Γ(t j−1,sk−1) Γ(t j,sk−1)
φ(x) dx −∫−−−−−−−−−−−−−−−−→Γ(t j,sk−1) Γ(t j,sk)
φ(x) dx .
Aufsummieren über j und k ergibt
0 =
p∑
j,k=1
∫−−−−−−−−−−−−−−−−−−−−→Γ(t j−1,sk−1) Γ(t j−1,sk)
φ(x) dx +
p∑
j,k=1
∫−−−−−−−−−−−−−−−−→Γ(t j−1,sk) Γ(t j,sk)
φ(x) dx
−p∑
j,k=1
∫−−−−−−−−−−−−−−−−−−−−→Γ(t j−1,sk−1) Γ(t j,sk−1)
φ(x) dx −p∑
j,k=1
∫−−−−−−−−−−−−−−−−→Γ(t j,sk−1) Γ(t j,sk)
φ(x) dx .
Nach Indexverschiebungen (k k + 1 bzw. j j − 1) in den letzten beiden Summenkürzen sich die meisten Summanden der ersten (zweiten) Summe mit welchen aus dervierten (dritten) Summe. Übrig bleibt
0 =
p∑
k=1
∫−−−−−−−−−−−−−−−−→Γ(t0,sk−1) Γ(t0,sk)
φ(x) dx +
p∑
j=1
∫−−−−−−−−−−−−−−−−→Γ(t j−1,sp) Γ(t j,sp)
φ(x) dx
−p∑
j=1
∫−−−−−−−−−−−−−−−−→Γ(t j−1,s0) Γ(t j,s0)
φ(x) dx −p∑
k=1
∫−−−−−−−−−−−−−−−−→Γ(tp,sk−1) Γ(tp,sk)
φ(x) dx .

11.6 Komplexe Wegintegrale und Holomorphie 387
Man beachte, dass Γ(t0, s) = Γ(a, s) = γ0(a) und Γ(tp, s) = Γ(b, s) = γ0(b) für alle s ∈ [0, 1].
Also sind die gerade Strecken−−−−−−−−−−−−−−−−→Γ(t0, sk−1) Γ(t0, sk) und
−−−−−−−−−−−−−−−−→Γ(tp, sk−1) Γ(tp, sk) konstant. Somit
verschwinden alle Wegintegrale in der ersten und in der vierten Summe, und wir erhalten
p∑
j=1
∫−−−−−−−−−−−−−−−−→Γ(t j−1,sp) Γ(t j,sp)
φ(x) dx =
p∑
j=1
∫−−−−−−−−−−−−−−−−→Γ(t j−1,s0) Γ(t j,s0)
φ(x) dx . (11.16)
Für jedes j = 1, . . . , p sind aber γ0|[t j−1,t j] und−−−−−−−−−−−−−−−−→Γ(t j−1, s0) Γ(t j, s0) zwei stetige und stückweise
stetig differenzierbare Wege, welche denselben Anfangspunkt γ0(t j−1) = Γ(t j−1, s0) unddenselben Endpunkt γ0(t j) = Γ(t j, s0) haben. Aus (11.15) folgt zudem, dass beide Wegeinnerhalb von Uρ(γ0(t j)) ⊆ D verlaufen, worauf φ ein Gradientenfeld ist. Wegen Satz 11.4.1erhalten wir somit, dass die Wegintegrale von φ über diese beiden Wege übereinstimmen:
∫−−−−−−−−−−−−−−−−→Γ(t j−1,s0) Γ(t j,s0)
φ(x) dx =
∫
γ0 |[t j−1 ,t j]
φ(x) dx .
Wir erhalten nach dem Aufsummieren über die j, dass die rechte Seite in (11.16) mit∫γ0φ(x) dx übereinstimmt. Entsprechend zeigt man, dass die linke Seite in (11.16) mit∫
γ1φ(x) dx übereinstimmt. Also folgt die behauptete Gleichheit.
Wenn D ein einfach zusammenhängendes Gebiet ist, dann sind zwei Wege mit gleichemAnfangs- und Endpunkten immer homotop. Gemäß Satz 11.4.7 und dem ersten Teil desaktuellen Satzes ist dann jedes lokale Gradientenfeld sogar ein Gradientenfeld. q
11.6 Komplexe Wegintegrale und HolomorphieWir wollen diesen Abschnitt mit einer Bemerkung aus der Linearen Algebra beginnen.
11.6.1 Bemerkung. Vektorräume X und Y über dem Skalarkörper C lassen sich klarerwei-se auch als Vektorräume über R auffassen. Ist dabei A : X → Y eine C-lineare Abbildung,so ist A sicherlich auch R-linear. Die Umkehrung gilt im Allgemeinen sicher nicht, wieetwa das Beispiel der Vektorräume X = C = Y und A(ξ + iη) = 3ξ + iη zeigt.Wir fragen also, wann eine R-lineare Abbildung A : X → Y auch C-linear ist. Eineoffensichtlich notwendige Bedingung ist
A(ix) = iA(x) für alle x ∈ X . (11.17)
Diese Bedingung ist auch hinreichend, da wegen der R-Linearität A(x + y) = A(x) + A(y)für x, y ∈ X und da (ξ, η ∈ R, x ∈ X)
A((ξ + iη)x
)= A(ξx) + A(iηx) = A(ξx) + iA(ηx) = ξA(x) + iηA(x) = (ξ + iη)A(x) .
Für ein R-lineares A : X → Y gilt (11.17) sicher schon, wenn A(ix) = iA(x) für alle x auseiner Basis von X, als Vektorraum über R betrachtet, gilt.

388 11 Wegintegrale
Da 1, i eine Basis von C (über R) abgibt, trifft im Falle X = C Gleichung (11.17) genaudann zu, wenn
A(i) = iA(1) . (11.18)
In dem Fall ist wegen
A(ξ + iη) = A((ξ + iη) · 1) = (ξ + iη) · A(1) (11.19)
die Abbildung A die skalare Multiplikation mit dem Vektor A(1) ∈ Y .Im Spezialfall X = Y = C � R2 können wir jede R-lineare Abbildung A : C → C als2 × 2-Matrix A =
( α11 α12α21 α22
)anschreiben. Wegen 1 � (1, 0)T , i � (0, 1)T und weil für
ξ + iη � (ξ, η)T aus C � R2
i(ξ + iη) = −η + iξ �(−ηξ
)=
(0 −11 0
) (ξη
)
gilt, bedeutet Bedingung (11.18) dann gerade(α12
α22
)=
(0 −11 0
) (α11
α21
)=
(−α21
α11
).
Das ist äquivalent dazu, dass A von der speziellen Form(α11 α12
α21 α22
)=
(a −bb a
)(11.20)
ist. Wegen (11.19) stellt A die Multiplikation mit der komplexen Zahl A(1) = a + ib dar.
11.6.2 Definition. Ist D ⊆ C, Y ein Banachraum über C, f : D → Y eine Funktion undγ : [a, b]→ D ein Weg, so ist das komplexe Wegintegral definiert durch
∫
γ
f (z) dz := lim|R|→0
n(R)∑
j=1
(γ(ξ j) − γ(ξ j−1)
)f(γ(α j)
), (11.21)
falls dieser Limes existiert.
Bemerkung 11.6.1 lässt sich dazu benutzen, um komplexe Wegintegrale auf die uns schonbekannten Wegintegral zurückzuführen. Man beachte, dass die Summanden in (11.21)Produkte von komplexen Zahlen mit Vektoren aus Y sind. Zum Vergleich dazu sind dieSummanden in (11.5) Elemente aus X, die man erhält, wenn man
(γ(ξ j) − γ(ξ j−1)
) ∈ Rn
auf die lineare Abbildung φ(γ(α j)
) ∈ L(Rn, X) anwendet.Um dennoch komplexe Wegintegrale als Wegintegrale betrachten zu können, identifizierenwir C mit R2. Dann lässt sich gemäß Bemerkung 11.6.1 die komplexe Multiplikationals Anwendung eins Zweivektors auf eine lineare Abbildung aus L(R2,Y) wie in (11.19)realisieren. Definieren wir also φ f : D→ L(R2,Y) durch
φ f (z) = ((ξ
η
)7→ (ξ + iη) f (z)) ,

11.6 Komplexe Wegintegrale und Holomorphie 389
so können wir (11.21) als∫
γ
f (z) dz = lim|R|→0
n(R)∑
j=1
φ f(γ(α j)
) (γ(ξ j) − γ(ξ j−1)
)=
∫
γ
φ f (x) dx (11.22)
anschreiben, wobei (γ(ξ j) − γ(ξ j−1)) jetzt als Element von C � R2 zu interpretieren ist, dasauf φ f
(γ(α j)
) ∈ L(R2,Y) angewandt wird.Die Stetigkeit von φ f ist wegen z 7→ φ f (z)e1 = f (z) und z 7→ φ f (z)e2 = i f (z) gemäßBemerkung 11.2.4 äquivalent zur Stetigkeit von f . Also existiert für stetiges f sowiestetiges und rektifizierbares γ gemäß Fakta 11.2.3, 2, das Integral in (11.22). Ist γ sogarstetig und stückweise stetig differenzierbar, so folgt aus Satz 11.2.5
∫
γ
f (z) dz =
∫
γ
φ f (x) dx =
∫ b
aφ f (γ(t)) γ′(t) dt =
∫ b
aγ′(t) · f (γ(t)) dt . (11.23)
Wegen (11.8) lässt sich die Norm eines komplexen Wegintegrals folgendermaßen abschät-zen: ∥∥∥∥∥∥
∫
γ
f (z) dz
∥∥∥∥∥∥ ≤ maxt∈[a,b]
‖ f ◦ γ(t)‖ · `(γ) . (11.24)
Sei wieder f : D→ Y eine Funktion mit offenem D ⊆ R2 � C und mit einem BanachraumY über dem Skalarkörper C. Ist f in einem Punkt z = x + iy � (x, y)T ∈ D differenzierbarim Sinne von Definition 10.1.13, so stellt d f (z) eine R-lineare Abbildung von R2 � Cnach Y mit
d f (z)v =∂ f∂v
(z) = v1∂ f∂x
(z) + v2∂ f∂y
(z) ∈ Y für alle v = (v1, v2)T ∈ R2 (� C)
dar. Gemäß (11.18) ist d f (z) genau dann C-linear, wenn
∂ f∂y
(z) = i∂ f∂x
(z) , (11.25)
denn es gilt ja 1 � (1, 0)T , i � (0, 1)T , wenn man komplexe Zahlen als Elemente von R2
betrachtet. In dem Fall gilt wegen (11.19) für v = (v1, v2)T ∈ R2
d f (z)v = (v1 + iv2) · d f (z)(10
)= (v1 + iv2) · ∂ f
∂x(z) . (11.26)
11.6.3 Bemerkung. Ist Y = C und setzen wir u := Re f und v := Im f , so gilt
d f (z) =
(∂u∂x (z) ∂u
∂y (z)∂v∂x (z) ∂v
∂y (z)
),
und die Vektorgleichung (11.25) lässt sich als
∂u∂y
(z) = −∂v∂x
(z),∂v∂y
(z) =∂u∂x
(z)
schreiben. Man spricht von den Cauchy-Riemannschen Differentialgleichungen.

390 11 Wegintegrale
11.6.4 Lemma. Sei D ⊆ C offen, Y ein Banachraum über C und f : D→ Y eine Funktion.Für ein z ∈ D sind folgende beiden Aussagen äquivalent:
� f ist bei z im Sinne von Definition 10.1.13 differenzierbar, sodass d f (z) eineC-lineareAbbildung ist bzw. äquivalent dazu, dass (11.25) gilt.
� Der Grenzwert – man spricht von der komplexen Ableitung –
d fdz
(z) = f ′(z) := limh→0
f (z + h) − f (z)h
existiert in Y.
Treffen diese Aussagen zu, so heißt f bei z komplex differenzierbar und es gilt
f ′(z) =∂ f∂x
(z) = −i · ∂ f∂y
(z) . (11.27)
Beweis. Gemäß Definition 10.1.13 und wegen der Äquivalenz der Normen ‖.‖2 = |.| und‖.‖∞ auf C � R2 ist f bei z genau dann differenzierbar, wenn
f (z + h) = f (z) + d f (z)h + |h|ε(h) für z + h ∈ D, h , 0 , (11.28)
mit einer Funktion ε : (D − z) \ {0} → Y , sodass limh→0 ε(h) = 0. Der Ausdruck d f (z)hist dabei die Anwendung von h = h1 + ih2, interpretiert als Element
(h1h2
)von R2, auf die
lineare Abbildung d f (z) ∈ L(R2,Y).Ist dabei (11.25) erfüllt, so folgt aus (11.26), dass d f (z)h = h · g(z) mit g(z) =
∂ f∂x (z) =
−i · ∂ f∂y (z) ∈ Y . Daraus erhält man
limh→0
f (z + h) − f (z)h
= g(z) + limh→0
|h|h· ε(h) = g(z) ,
da ‖ |h|h · ε(h)‖ = ‖ε(h)‖ → 0 für h→ 0.Falls umgekehrt der komplexe Grenzwert g(z) := limh→0
f (z+h)− f (z)h existiert, so folgt mit
ε(h) := h|h|
(f (z+h)− f (z)
h − g(z))
für z + h ∈ D, h , 0 unmittelbar
f (z + h) = f (z) + h · g(z) + |h| ε(h) für z + h ∈ D, h , 0 ,
wobei ε(h) → 0 für h → 0. Da die Ableitung d f (z) eindeutig ist, folgt hieraus d f (z)h =
h · g(z) und damit die C-Linearität von d f (z). q
11.6.5 Definition. Sei D ⊆ C offen und Y ein Banachraum über dem Skalarkörper C. EineFunktion f : D → Y heißt holomorph auf D, falls sie bei allen Punkten z ∈ D komplexdifferenzierbar ist und die Funktion z 7→ f ′(z) stetig ist.

11.6 Komplexe Wegintegrale und Holomorphie 391
11.6.6 Bemerkung. Die Eigenschaft von f : D → Y , holomorph zu sein, ist gemäßLemma 11.6.4 äquivalent zu der Tatsache, dass f auf D stetig differenzierbar ist, wobeid f (z) : R2(� C) → Y für alle z ∈ D auch C-linear ist. Die Stetigkeit von f ′ entsprichtdabei wegen (11.27) und Satz 10.1.15 der von d f : D→ L(R2,Y).Mit einiger Mühe lässt sich zeigen, dass die Forderung, dass z 7→ f ′(z) stetig ist, inDefinition 11.6.5 weggelassen werden kann; vgl. Satz 11.8.2.Schließlich sei bemerkt, dass wegen Fakta 10.1.14, 2, jedes holomorphe f auch stetig aufD ist.
11.6.7 Beispiel.
(i) Ist y ∈ Y fest und f : C → Y die konstante Funktion f (z) = y, so ist f an allenPunkten z ∈ C komplex differenzierbar mit
f ′(z) = limh→0
f (z + h) − f (z)h
= 0 (∈ Y) .
Da z 7→ 0 als Abbildung von C nach Y stetig ist, ist f holomorph.
(ii) Für die Funktion f : z 7→ z von C nach C, also f = idC, gilt an jedem Punkt z ∈ C
f ′(z) = limh→0
f (z + h) − f (z)h
= limh→0
(z + h) − zh
= 1 .
Da die konstante 1-Funktion stetig ist, folgt die Holomorphie von f .
(iii) Für die Funktion f : z 7→ 1z als Abbildung von C \ {0} nach C gilt an jedem Punkt
z ∈ C \ {0}f ′(z) = lim
h→0
1z+h − 1
z
h= lim
h→0
z − (z + h)hz(z + h)
= − 1z2 .
Da z 7→ − 1z2 als Abbildung von C \ {0} nach C stetig ist, folgt die Holomorphie von f .
11.6.8 Proposition. Seien D,G ⊆ C offen, Y ein komplexer Banachraum, α, β ∈ C undf , f1, f2 : D → Y, φ : D → C sowie g : G → Y allesamt holomorphe Funktionen. Danngelten folgende Aussagen:
� α f1 + β f2 : D → Y ist holomorph, wobei (α f1 + β f2)′(z) = α f ′1(z) + β f ′2(z) für allez ∈ D.
� φ · f : D→ Y ist holomorph, wobei die Produktregel,
(φ · f )′(z) = φ′(z) f (z) + φ(z) f ′(z) ,
für alle z ∈ D gilt.
� Die Funktion fφ
: {z ∈ D : φ(z) , 0} → Y9ist holomorph, wobei die Quotientenregel,(
fφ
)′(z) =
φ(z) f ′(z) − φ′(z) f (z)φ(z)2 ,
für alle z ∈ D mit φ(z) , 0 gilt.

392 11 Wegintegrale
� g ◦ φ : φ−1(G)→ Y9 ist holomorph, wobei die Kettenregel,
(g ◦ φ)′(z) = φ′(z) · g′(φ(z)) ,
für alle z ∈ φ−1(G) gilt.
Beweis. Linearität, Produktregel und Quotientenregel zeigt man fast genauso, wie die fürsreelle Differenzieren; vgl. Satz 7.1.7. Die Grenzübergänge limh→0 sind dabei aber in C zunehmen.Für die Kettenregel sei z ∈ D mit φ(z) ∈ G. Für |h| hinreichend klein gilt dann
g ◦ φ(z + h) − g ◦ φ(z)h
=φ(z + h) − φ(z)
h· r(φ(z + h)) ,
wobei r : G → Y durch r(w) =g(w)−g(φ(z))
w−φ(z) für w , φ(z) und r(φ(z)) := g′(φ(z)) definiert ist.Wegen der komplexen Differenzierbarkeit von g ist r bei φ(z) stetig, wodurch
limh→0
g ◦ φ(z + h) − g ◦ φ(z)h
= limh→0
φ(z + h) − φ(z)h
· r(φ(z + h)) = φ′(z) · g′(φ(z)) .
Die Funktion z 7→ φ′(z) · g′(φ(z)) = (g ◦ φ)′ ist als Produkt stetiger Funktionen wiederstetig. q
11.6.9 Beispiel.
(i) Durch vollständige Induktion nach n ∈ N ∪ {0} folgt aus (z 7→ z)′ = 1 zusammen mitder Produktregel, dass auch z 7→ zn auf C holomorph ist, wobei (z 7→ zn)′(w) = nwn−1.
(ii) Durch wiederholte Anwendung von Proposition 11.6.8 folgt, dass alle Polynomef (z) = a0 + a1z + · · · + anzn mit festen a0, . . . , an ∈ Y auf C holomorph sind. Dabeigilt f ′(z) = a1 + 2za2 + · · · + nzn−1an.
(iii) Mit der Quotientenregel zeigt man allgemeiner, dass f : C \ {w} → Y mit (N ∈ N,w ∈ C und a−N , . . . , aN ∈ Y fest)
f (z) =
N∑
n=−N
(z − w)nan
holomorph ist, wobei
f ′(z) =
N∑
n=−N
n(z − w)n−1an .
9 Man beachte, dass der Definitionsbereich dieser Funktion als Urbild einer offenen Menge unter derstetigen Funktion φ selber offen ist.

11.6 Komplexe Wegintegrale und Holomorphie 393
(iv) Die Funktion exp : C → C ist auch holomorph, wobei exp′(z) = exp(z). Das folgtzum Beispiel aus der Tatsache, dass für f : R→ C, t 7→ exp(wt) wegen der Rechnungin Beispiel 7.1.4 f ′(t) = w exp(wt) gilt. Daraus folgt dann
∂
∂xexp(x + iy) = exp(iy)
∂
∂xexp(x) = exp(x + iy) ,
∂
∂yexp(x + iy) = exp(x)
∂
∂xexp(iy) = i exp(x + iy) .
Da diese Funktionen auf C stetig sind, erhalten wir exp ∈ C1(C), wobei offensichtlichauch (11.25) erfüllt ist. Also ist exp holomorph, wobei wegen (11.27) exp′(z) =
exp(z).
Die Tatsache, dass f : D → Y holomorph ist, lässt sich auch von einer anderen Seitebeleuchten. Dazu betrachte man das stetig differenzierbare Vektorfeld φ f : D→ L(R2,Y)definiert durch φ f (z) = (
(ξη
)7→ (ξ + iη) f (z)). Aus (11.25) folgt (z = x + iy)
∂
∂yφ f (z)e1 =
∂
∂yf (z) = i
∂ f∂x
(z) =∂
∂xφ f (z)e2 .
Gemäß Satz 11.4.14 ist φ f ein lokales Gradientenfeld, und wir können Satz 11.5.4 anwen-den, um folgendes Korollar herzuleiten.
11.6.10 Korollar. Sei f : D → Y holomorph auf der offenen Menge D ⊆ C. Sindγ0, γ1 : [a, b]→ D zwei stetige und stückweise stetig differenzierbare Wege mit gleichenAnfangs- und gleichen Endpunkten, die homotop in D sind, so gilt
∫
γ0
f (z) dz =
∫
γ1
f (z) dz .
Ist D einfach zusammenhängend, dann gibt es eine, bis auf eine additive Konstante aus Yeindeutige, holomorphe Funktion F mit F′(z) = f (z) für alle z ∈ D. Dabei gilt
F(z) − F(w) =
∫
γ
f (ζ) dζ
für alle z,w ∈ D. Hier ist die rechte Seite ein komplexes Wegintegral und γ irgendeinstetiger, stückweise stetig differenzierbarer und in D verlaufender Weg mit Anfangspunkt wund Endpunkt z.
Beweis. Wegen (11.22) gilt∫γ0
f (z) dz =∫γ0φ f (x) dx und
∫γ1
f (z) dz =∫γ1φ f (x) dx. Also
folgt die erste Aussage sofort aus Satz 11.5.4.Ist D einfach zusammenhängend, so folgt aus demselben Satz, dass φ f ein Gradientenfeldist, also φ f = dF für ein stetig differenzierbares F : D→ Y . Dieses F ist gemäß Korollar11.4.4 eindeutig bis auf eine additive Konstante aus Y . Da e1, e2 eine Basis von R2 ist,bedeutet aber φ f = dF nichts anderes, als
i · ∂F∂x
(z) = i · φ f (z) e1 = i · f (z) = φ f (z) e2 =∂F∂y
(z) .

394 11 Wegintegrale
Also folgt die Holomorphie von F, wobei wegen (11.27) F′ = f . Schließlich erhält manF(z) − F(w) =
∫γ
f (ζ) dζ unmittelbar aus (11.22) und Satz 11.4.1. q
11.6.11 Bemerkung. Angenommen D ⊆ C ist offen und w, z ∈ D sowie 0 < r1 < r2 <+∞ derart, dass Kr1(z) ⊆ Kr2(w) und Kr2(w) \ Ur1(z) ⊆ D, wobei wir hier die Kugelnbzgl. ‖.‖2 = |.| meinen. Wir schließen dabei den Fall z = w nicht aus. Weiters seienγ1, γ2 : [0, 2π] → D die Wege γ1(t) = z + r1 exp(it) bzw. γ2(t) = w + r2 exp(it), für dieγ1([0, 2π]) = Kr1(z) \ Ur1(z) ⊆ Kr2(w) und γ2([0, 2π]) = Kr2(w) \ Ur2(w) gilt.Wir behaupten, dass für jedes holomorphe f : D→ Y
∫
γ1
f (z) dz =
∫
γ2
f (z) dz . (11.29)
Dazu betrachten wir für j = 1, 2 die Wege β j : [−1, 2π + 1] definiert durch
β j(t) =
−t2
(γ1(0) + γ2(0)
)+ (1 + t)γ j(0) , falls t ∈ [−1, 0) ,
γ j(t) , falls t ∈ [0, 2π] ,t−2π
2
(γ1(0) + γ2(0)
)+ (1 − t + 2π)γ j(0) , falls t ∈ (2π, 2π + 1] .
γ2 = β2|[0,2π]
β1|[−1,0]
β1|[2π,2π+1]
γ1 = β1|[0,2π]
β2|[−1,0]
β2|[2π,2π+1]w
mz
Beide Wege sind geschlossen, und beidehaben den Anfangs- bzw. Endpunkt m :=12
(γ1(0) + γ2(0)
). β j setzt sich zusammen
aus dem zur Strecke−−−−−→mγ j(0) äquivalenten
Teil β j|[−1,0], aus γ j = β j|[0,2π] und aus dem
zur Strecke−−−−−→γ j(0)m =
−−−−−→mγ j(0)− äquivalenten
Teil β j|[2π,2π+1].
Da Kr2(w) konvex ist, verlaufen die Wege β1 und β2 ganz in Kr2(w). Außerdem gilt für alleζ ∈ Kr2(w)
Re ζ = Re w + Re(ζ − w) ≤ Re w + |ζ − w| ≤ Re w + r2 ,
und somitRe z + r1 = Re γ1(0) ≤ Re w + r2 = Re γ2(0) .
Da die Bilder von β j|[−1,0] und β j|[2π,2π+1] ganz im Bild von−−−−−−−−→γ1(0)γ2(0) enthalten sind, sind
diese auch ganz in der konvexen Teilmenge {ζ ∈ C : Re ζ ≥ Re z + r1} von C enthalten.Wegen Re ζ − Re z ≤ |ζ − z| gilt {ζ ∈ C : Re ζ ≥ Re z + r1} ⊆ C \ Ur1(z), womit die Wegeβ1 und β2 ganz in Kr2(w) \ Ur1(z) ⊆ D verlaufen.

11.6 Komplexe Wegintegrale und Holomorphie 395
Definieren wir Γ : [−1, 2π + 1] × [0, 1]→ C durch
Γ(t, s) := sβ1(t) + (1 − s)β2(t) , (11.30)
so folgt aus Konvexitätsgründen auch, dass das Bild von Γ ganz in Kr2(w) liegt.Andererseits gilt für t ∈ [0, 2π] und s ∈ [0, 1] wegen der zu Kr1(z) ⊆ Kr2(w) äquivalentenTatsache, dass |z − w| + r1 ≤ r2, und wegen der umgekehrten Dreiecksungleichung
r1 = (1 − s)r1 + sr1 ≤ ((1 − s)r2 + sr1
) − (1 − s)|z − w|≤
∣∣∣((1 − s)r2 + sr1) · exp(it) − (1 − s)(z − w)∣∣∣ = |sγ1(t) + (1 − s)γ2(t) − z| .
Somit liegt Γ(t, s) immer außerhalb von Ur1(z).Zudem liegt für t ∈ [−1, 0] ∪ [2π, 2π + 1] und s ∈ [0, 1] der Punkt Γ(t, s) wieder ausKonvexitätsgründen ganz in {ζ ∈ C : Re ζ ≥ Re z + r1}.Insgesamt liegt das Bild von Γ in Kr2(w) \ Ur1(z) ⊆ D. Also sind die Wege β1 und β2
homotop in D. Gemäß Korollar 11.6.10 gilt für die auf D holomorphe Funktion f∫
β1
f (z) dz =
∫
β2
f (z) dz .
Da β j|[−1,0] äquivalent zu β j|[2π,2π+1]− ist, heben sich die Wegintegrale über die linearenTeile von β j für j = 1, 2 auf (vgl. Fakta 11.2.3, 1), und es folgt (11.29).
11.6.12 Satz (Cauchysche Integralformel). Sei f : D→ Y holomorph mit offenem D ⊆ C,und seien w ∈ C und ρ > 0 derart, dass Kρ(w) ⊆ D.Ist z ∈ Uρ(w), und ist γ : [0, 2π]→ D der Weg γρ : t 7→ w + ρ · exp(it) oder ein in D \ {z}zu γρ homotoper, stetiger und stückweise stetig differenzierbarer Weg, so gilt
f (z) =1
2πi
∫
γ
f (ζ)ζ − z
dζ . (11.31)
Beweis. Man betrachte die Funktion G : D \ {z} → Y definiert durch
G(η) =f (η) − f (z)η − z
.
Nach Proposition 11.6.8 ist G holomorph. Da limη→zf (η)− f (z)η−z existiert, kann man G auf D
durch G(z) := f ′(z) stetig fortsetzen; vgl. Bemerkung 6.4.4.Wegen Kρ(w) \ Ur(z) ⊆ D \ {z} für ein hinreichend kleines r > 0 folgt aus Bemerkung11.6.11, dass ∫
γρ
G(ζ) dζ =
∫
µε
G(ζ) dζ ,
für alle ε ∈ (0, r], wobei µε(t) = z + ε · exp(it). Andererseits kann man den Betrag derrechten Seite mit Hilfe von (11.24) nach oben abschätzen durch
maxt∈[0,2π]
‖G ◦ µε(t)‖ · `(µε) ≤ supη∈Kρ(w)
‖G(η)‖ ·∫ 2π
0|µ′ε(t)| dt = sup
η∈Kρ(w)‖G(η)‖ · 2πε .

396 11 Wegintegrale
Da G auf das kompakte Kρ(w) stetig fortgesetzt wurde, sind obige Suprema endlich. Damitgeht der Ausdruck rechts für ε → 0+ gegen Null. Weil komplexe Wegintegrale linear imIntegranden sind, folgt
0 =
∫
γρ
G(ζ) dζ =
∫
γρ
f (ζ)ζ − z
dζ − f (z) ·∫
γρ
1ζ − z
dζ .
Wieder mit Bemerkung 11.6.11 und mit Hilfe von (11.23) berechnet man∫
γρ
1ζ − z
dζ =
∫
µr
1ζ − z
dζ = 2πi .
Somit folgt (11.31) für γ = γρ. Ist γ in D \ {z} homotop zu γρ, so folgt (11.31) aus Korollar11.6.10. q
Schreiben wir (11.31) mit Hilfe von (11.23) als Riemann-Integral, so erhalten wir für allez ∈ Uρ(w)
f (z) =1
2πi
∫
γρ
f (ζ)ζ − z
dζ =1
2π
∫ 2π
0ρ exp(it) · f (w + ρ exp(it))
w + ρ exp(it) − zdt . (11.32)
11.6.13 Korollar. Ist f : D → Y holomorph mit offenem D ⊆ C, so ist auch f ′ : D → Yholomorph. Infolge sind alle Funktionen f (n) : D → Y, n ∈ N rekursiv definiert durchf (n+1) = ( f (n))′, holomorph auf D. Insbesondere ist f ∈ C∞(D).Dabei gilt für jedes w ∈ D und ρ > 0 mit Kρ(w) ⊆ D
f (n)(z) =n!2πi
∫
γ
f (ζ)(ζ − z)n+1 dζ für alle z ∈ Uρ(w) . (11.33)
Hier ist γ : [0, 2π]→ D der Weg γρ : t 7→ w +ρ · exp(it) oder ein in D \ {z} zu γρ homotoper,stetiger und stückweise stetig differenzierbarer Weg.
Beweis. Sei ρ > 0, sodass Kρ(w) ⊆ D. Der Integrand
ht(z) := ρ exp(it) · f (w + ρ exp(it))w + ρ exp(it) − z
der rechten Seite von (11.32) ist offensichtlich stetig als Funktion von (z, t) ∈ Uρ(w)×[0, 2π]nach Y; vgl. Korollar 6.1.8. Wie wir in Beispiel 11.6.9 gesehen haben, ist ht(z) als Funktionder Variable z ∈ Uρ(w) holomorph mit (z = x + iy)
∂ht
∂x(z) = −i · ∂ht
∂y(z) = h′t(z) = ρ exp(it) · f (w + ρ exp(it))
(w + ρ exp(it) − z)2 .
Diese Funktion ist stetig als Funktion von (z, t) ∈ Uρ(w) × [0, 2π] nach Y . Insbesonderesind die Voraussetzungen von Korollar 8.7.12 (siehe auch (9.18)) erfüllt, und wir erhalten

11.6 Komplexe Wegintegrale und Holomorphie 397
für z ∈ Uρ(w)
f ′(z) =1
2π
∫ 2π
0
∂
∂xht(z) dt =
12π
∫ 2π
0ρ exp(it) · f (w + ρ exp(it))
(w + ρ exp(it) − z)2 dt
=1
2πi
∫
γρ
f (ζ)(ζ − z)2 dζ .
Nun ist h′t : Uρ(w)→ Y ebenfalls holomorph mit
∂h′t∂x
(z) = −i · ∂h′t∂y
(z) = h′′t (z) = ρ exp(it) · 2 f (w + ρ exp(it))(w + ρ exp(it) − z)3 .
Diese Funktion ist wieder stetig als Funktion von (z, t) ∈ Uρ(w) × [0, 2π] nach Y . NachKorollar 8.7.12 (siehe auch (9.18)) folgt für z ∈ Uρ(w)
∂ f ′
∂x(z) =
12π
∫ 2π
0
∂
∂xh′t(z) dt =
12π
∫ 2π
0−i · ∂
∂yh′t(z) dt = −i · ∂ f ′
∂y(z) .
wobei diese Funktion gemäß Korollar 8.7.9 (siehe auch (9.17)) für jedes kompakte K ⊆Uρ(w) stetig von z ∈ K abhängt. Da die Stetigkeit eine lokale Eigenschaft ist, und dajede abgeschlossene, in Uρ(w) enthaltenen Kugel um z ∈ Uρ(w) kompakt ist, folgt dieStetigkeit auf ganz Uρ(w) . Somit gilt f ′ ∈ C1(D), und nach Lemma 11.6.4 ist f ′ auf Uρ(w)holomorph, wobei
( f ′)′(z) =∂ f ′
∂x(z) =
12π
∫ 2π
0h′′t (z) dt =
22πi
∫
γρ
f (ζ)(ζ − z)3 dζ .
Insbesondere gilt f ∈ C2(Uρ(w)). Da w ∈ D beliebig war, gilt f ∈ C2(D), und – Holomor-phie ist eine lokale Eigenschaft – ist f ′ holomorph auf D.Verfährt man induktiv weiter, so folgt insbesondere (11.33) und f ∈ Cn(D) für alle n ∈ N,wobei γ = γρ in (11.33). Für in D \ {z} zu γρ homotope γ folgt (11.33) aus Korollar11.6.10. q
11.6.14 Korollar (Satz von Liouville). Jedes auf ganz C holomorphe und beschränktef : C→ Y ist eine konstante Funktion.
Beweis. Es gelte ‖ f (z)‖ ≤ M für alle z ∈ C. Ist ρ > 0, w ∈ C und γ(t) = w + ρ · exp(it), sofolgt wegen (11.33) und (11.24)
‖ f ′(w)‖ =1
2π
∥∥∥∥∥∥
∫
γ
f (ζ)(ζ − w)2 dζ
∥∥∥∥∥∥ ≤1
2πM
1ρ2 · 2πρ =
Mρ.
Da wir ρ > 0 beliebig groß wählen können, folgt f ′(w) = 0. Wegen 0′ = 0 folgt aus derEindeutigkeitsaussage in Korollar 11.6.10, dass f konstant ist. q
Ein stetiger Weg γ : [a, b]→ D heißt geschlossen, wenn γ(a) = γ(b).

398 11 Wegintegrale
11.6.15 Satz (Satz von Morera). Für ein offenes D ⊆ C und eine Funktion f : D→ Y sindfolgende Aussagen äquivalent:
� f ist holomorph.
� f ist stetig und zu jedem w ∈ D gibt es ein offenes D(w) mit w ∈ D(w) ⊆ D, sodass∫
γ
f (ζ) dζ = 0 (11.34)
für alle geschlossenen, achsenparallelen Polygonzüge γ in D(w).
� Das Vektorfeld φ f : D → L(R2,Y) definiert durch φ f (z) = ((ξη
)7→ (ξ + iη) f (z)) ist
ein lokales Gradientenfeld.
In dem Fall gilt (11.34) für alle einfach zusammenhängenden Gebiete D(w) mit w ∈D(w) ⊆ D, etwa für alle offenen, in D enthaltenen Kugeln um w.
Beweis. Ist f holomorph und D(w) einfach zusammenhängendes Gebiet mit w ∈ D(w) ⊆D, so folgt
∫γ
f (ζ) dζ = 0 sofort aus Korollar 11.6.10. Außerdem ist f stetig; vgl. Lemma11.6.4.Sei nun f stetig und gelte (11.34) für jedes w ∈ D und jeden geschlossenen, achsenpar-allelen Polygonzug γ in D(w) mit einem offenen D(w), sodass w ∈ D(w) ⊆ D. WegenBemerkung 11.2.4 ist die Stetigkeit von f zu der von φ f : D → L(R2,Y) äquivalent.Gemäß (11.22) gilt
0 =
∫
γ
f (ζ) dζ =
∫
γ
φ f (x) dx
für das Vektorfeld φ f |D(w) : D(w) → L(R2,Y). Nach Bemerkung 11.4.8 sind daher dieVoraussetzungen von Satz 11.4.7 für φ f : D(w)→ L(R2,Y) erfüllt. Somit gilt φ f = dF fürein Y-wertiges F ∈ C1(D(w)). Definitionsgemäß ist daher φ f : D→ L(R2,Y) ein lokalesGradientenfeld.Sei schließlich φ f : D → L(R2,Y) ein lokales Gradientenfeld. Da e1, e2 eine Basis vonR2 ist, bedeutet aber φ f = dF auf einer offenen, w enthaltenden Menge D(w) ⊆ D nichtsanderes, als
i · ∂F∂x
(z) = i · φ f (z) e1 = i · f (z) = φ f (z) e2 =∂F∂y
(z) .
Damit folgt die Holomorphie von F auf D(w), wobei wegen (11.27) F′ = f . Gemäß Korol-lar 11.6.13 ist auch F′ = f auf D(w) holomorph. Da w beliebig war, und da Holomorphieeine lokale Eigenschaft ist, folgt die Behauptung. q
11.6.16 Lemma. Sei D ⊆ C offen, und fn : D → Y, n ∈ N, eine Folge holomorpherFunktionen, die lokal gleichmäßig auf D gegen eine Funktion f : D → Y konvergiert.Letzteres bedeutet, dass für jede kompakte Teilmenge K ⊆ D ( fn|K)n∈N gleichmäßig auf Kgegen f |K konvergiert. Dann ist auch f holomorph.

11.6 Komplexe Wegintegrale und Holomorphie 399
Beweis. Wähle zu w ∈ D die offene Menge D(w) wie Satz 11.6.15. Gemäß dieses Satzeskönnen wir sie sogar unabhängig von n so wählen, dass für alle n ∈ N
∫
γ
fn(ζ) dζ = 0 ,
wenn nur γ : [0,m] → D(w) ein geschlossener, achsenparalleler Polygonzug ist. K :=γ([0,m]) ist als stetiges Bild einer kompakten Menge selber kompakt. Nun stimmt wegen(11.23) obiges Wegintegral überein mit
∫ m
0γ′(t) · fn(γ(t)) dt = 0 .
Wegen 10 ‖γ′(t) · fn(γ(t))−γ′(t) · f (γ(t))‖ ≤ ‖ fn− f ‖∞,K · ‖γ′‖∞,[0,m] für alle t ∈ [0,m], und daγ ein Polygonzug ist und daher ‖γ′‖∞,[0,m] < +∞, konvergiert die Funktionenfolge γ′ · fn ◦γgleichmäßig gegen γ′ · f ◦ γ auf [0,m]. Aus Satz 8.7.2 (siehe auch (9.16)) folgt
∫
γ
f (ζ) dζ =
∫ m
0γ′(t) · f (γ(t)) dt = lim
n→∞
∫ m
0γ′(t) · fn(γ(t)) dt = 0 .
Nach Satz 11.6.15 ist daher f holomorph. q
11.6.17 Korollar. Seien ak ∈ Y, k ∈ N ∪ {0} derart, dass die Potenzreihe∑∞
k=0 zkak einenKonvergenzradius R > 0 hat11. Für w ∈ C ist die Grenzfunktion
f (z) =
∞∑
k=0
(z − w)kak
auf UR(w) = {z ∈ C : |z − w| < R} holomorph, wobei a0 = f (w) und an =f (n)(w)
n! für allen ∈ N.
Beweis. Für ein kompaktes K ⊆ UR(w) existiert r = maxz∈K |z − w| (< R), da z 7→ |z − w|stetig auf der kompakten Menge K ist. Also gilt K ⊆ Kr(w) ⊆ UR(w).Nach Satz 6.8.7 (siehe auch Fakta 9.3.9, 4) konvergiert die Funktionenfolge sm(z) :=∑m
k=0(z − w)kak für m→ ∞ gleichmäßig auf Kr(w) und damit auf K gegen f (z). Da gemäßBeispiel 11.6.9 alle Polynome sm(z) holomorph sind, ist nach Lemma 11.6.16 auch f aufUR(w) holomorph. Für ρ ∈ (0,R) und n ∈ N ∪ {0} gilt gemäß (11.33)
f (n)(w) = f (n)(z) =n!2πi
∫
γρ
f (ζ)(ζ − w)n+1 dζ
= limm→∞
n!2πi
∫
γρ
sm(ζ)(ζ − w)n+1 dζ = lim
m→∞s(n)
m (w) = n!an .
Die Vertauschung von Limes und Integral darf vorgenommen werden, da sm auf Kρ(w)gleichmäßig gegen f konvergiert; vgl. Beweis von Lemma 11.6.16. q
10γ ist bei allen bis auf endlich viele t ∈ [0,m] differenzierbar. An den Ausnahmepunkten können wir indiesem Zusammenhang γ′(t) := 0 setzen; vgl. Satz 11.2.5.
11 Vergleiche (6.7), Satz 6.8.7 sowie Fakta 9.3.9.

400 11 Wegintegrale
11.6.18 Satz. Sei D ⊆ C offen. Eine Funktion f : D → Y ist genau dann holomorph,wenn f analytisch ist, also wenn es zu jedem w ∈ D eine offene Kreisscheibe Uρw(w) ⊆ Dbzgl. |.| gibt, sodass sich f darauf als Grenzfunktion einer Potenzreihe
∑∞n=0(z − w)nan mit
Konvergenzradius größer oder gleich ρw darstellen lässt; vgl. Bemerkung 6.8.11.Die Koeffizienten an sind dabei eindeutig durch f und w bestimmt, und das größtmöglicheρw, sodass sich ein holomorphes f als Potenzreihe auf Uρw(w) darstellen lässt, ist ρw =
sup{r > 0 : Ur(w) ⊆ D}, wobei ρw = +∞, wenn D = C.
Beweis. Lässt sich f um jedes w auf einem Uρw(w) ⊆ D lokal als Grenzfunktion einerPotenzreihe darstellen, so ist f dort gemäß Korollar 11.6.17 holomorph, wobei an =
f (n)(w)n! .
Da Holomorphie eine lokale Eigenschaft ist, muss f auf ganz D holomorph sein.Sei nun f : D → Y holomorph, und setze ρw = sup{r > 0 : Ur(w) ⊆ D}. Offensichtlichist r = ρw maximal, sodass Ur(w) ⊆ D. Für ρ ∈ (0, ρw), ζ ∈ C mit |ζ − w| = ρ und fürz ∈ Uρ(w) gilt
1ζ − w
·∞∑
n=0
(z − wζ − w
)n
=1
ζ − w· 1
1 − z−wζ−w
=1
ζ − z.
Aus (11.32) folgt mit γρ(t) = w + ρ exp(it), t ∈ [0, 2π]
f (z) =1
2πi
∫
γρ
∞∑
n=0
(z − wζ − w
)n
· f (ζ)ζ − w
dζ
=1
2π
∫ 2π
0
∞∑
n=0
(z − wρ exp(it)
)n
· f (w + ρ exp(it)) dt .
Wegen
supt∈[0,2π]
∞∑
n=0
∥∥∥∥∥∥
(z − wρ exp(it)
)n
· f (w + ρ exp(it))
∥∥∥∥∥∥ ≤∞∑
n=0
( |z − w|ρ
)n
· ‖ f ‖∞,Kρ(w) < +∞
konvergiert die Reihe im obigen Riemann-Integral absolut und daher gleichmäßig; vgl.Korollar 6.8.4. Aus Satz 8.7.2 (siehe auch (9.16)) folgt daher12
f (z) =
∞∑
n=0
12π
∫ 2π
0
(z − wρ exp(it)
)n
· f (w + ρ exp(it)) dt
=
∞∑
n=0
(z − w)n ·(
12πi
∫
γρ
f (ζ)(ζ − w)n+1 dζ
)
︸ ︷︷ ︸=:an
.
Die letzte Gleichheit folgt aus (11.23). Also konvergiert∑∞
n=0(z − w)nan und stimmt mitf (z) überein.Aus (6.7) folgt schließlich, dass diese Potenzreihe einen Konvergenzradius R ≥ |z − w|hat, und da z ∈ Uρ(w) beliebig war, gilt R ≥ ρ. Da auch ρ ∈ (0, ρw) beliebig war, folgtR ≥ ρw. q
12 Insbesondere konvergiert diese Reihe!

11.7 Laurentreihen* 401
11.6.19 Bemerkung (*). Wir haben gezeigt, dass jedes holomorphe f : D→ Y unendlichoft differenzierbar ist. Somit existieren neben allen höheren partiellen Ableitungen auchalle Ausdrücke der Form (10.8), also dk f (z)(v1, . . . , vk) aus Definition 10.2.7 für alle k ∈ N,alle z ∈ D und alle Richtungsvektoren v1, . . . , vk ∈ R2 � C. Gemäß (11.26) gilt für k = 1
∂ f∂v1
(z) = d1 f (z)v1 = v1 · f ′(z) .
Ersetzen wir f durch die holomorphe Funktion z 7→ v1 · f ′(z) und v1 durch v2, so folgt
∂
∂v2
∂
∂v1f (z) = d2 f (z)(v1, v2) = v2 · v1 · f ′(z) .
Fährt man so fort, so erhält man allgemein dk f (z)(v1, . . . , vk) = vk · . . . · v1 · f (k)(z).Insbesondere stimmt die Reihe aus Proposition 10.2.13, (ii), für y = w ∈ D mit derPotenzreihe aus Satz 11.6.18 überein.
11.7 Laurentreihen*Wir betrachten zunächst ein holomorphes f : D → Y mit einem Banachraum Y überC und einem offenen D ⊆ C derart, dass für gewisse 0 < r < R < +∞ und w ∈ C derabgeschlossene Kreisring KR(w) \ Ur(w) in D enthalten ist.
11.7.1 Bemerkung. Für ein z ∈ UR(w)\Kr(w) gilt dann folgende Variante der CauchyschenIntegralformel:
f (z) =1
2πi
∫
γR
f (ζ)ζ − z
dζ − 12πi
∫
γr
f (ζ)ζ − z
dζ , (11.35)
wobei γρ : [0, 2π] → C, γρ(t) = w + ρ exp(it) für ρ > 0. Um das einzusehen, betrachtenwir die Funktion G : D→ Y ,
G(η) =f (η) − f (z)η − z
für η , z und G(z) = f ′(z) ,
wie im Beweis von Satz 11.6.12. Auf D\{z} ist G holomorph. Weiters ist η 7→ (η−z)G(η) =
f (η) − f (z) auf ganz D holomorph und verschwindet bei η = z. Nach Satz 11.6.18 gilt
(η − z)G(η) =
∞∑
n=1
(η − z)n f (n)(z)n!
und infolge
G(η) =
∞∑
n=0
(η − z)n f (n+1)(z)(n + 1)!
(11.36)
für η ∈ Uρ(z) \ {z} mit einem hinreichend kleinen ρ > 0. Bildet man hier limη→z, so erkenntman, dass (11.36) für alle η ∈ Uρ(z) gilt. Gemäß Korollar 11.6.17 ist G auf Uρ(z), undinfolge auf ganz D holomorph. Nach Bemerkung 11.6.11, angewandt auf G, gilt
∫
γR
G(ζ) dζ =
∫
γr
G(ζ) dζ

402 11 Wegintegrale
und somit∫
γR
f (ζ)ζ − z
dζ − f (z)∫
γR
1ζ − z
dζ =
∫
γr
f (ζ)ζ − z
dζ − f (z)∫
γr
1ζ − z
dζ .
Da ζ 7→ 1ζ−z auf U|z−w|(w) holomorph ist, und da γr in U|z−w|(w) verläuft, folgt aus Korollar
11.6.10, dass∫γr
1ζ−z dζ = 0. Wie im Beweis von Satz 11.6.12 erkennt man, dass
∫γR
1ζ−z dζ =
2πi. Umformen ergibt schließlich (11.35).
11.7.2 Satz. Sei D ⊆ C offen und sei w ∈ C, sodass URw(w) \ Krw(w) ⊆ D für gewisse0 ≤ rw < Rw ≤ +∞. Ist f : D→ Y holomorph, so gilt für alle z ∈ URw(w) \ Krw(w)
f (z) =
+∞∑
n=−∞(z − w)nan , (11.37)
wobei die Potenzreihe∑+∞
n=0 ζnan Konvergenzradius größer oder gleich Rw und die Po-
tenzreihe∑+∞
n=1 ζna−n Konvergenzradius größer oder gleich 1
rwhat, und damit obige Reihe
auf URw(w) \ Krw(w) konvergiert. Die Koeffizienten an, sind durch f und den BereichURw(w) \ Krw(w) eindeutig bestimmt, wobei für alle n ∈ Z
an =1
2πi
∫
γρ
f (ζ)(ζ − w)n+1 dζ (11.38)
mit γρ : [0, 2π] → C, γρ(t) = w + ρ exp(it) für jeden Radius ρ ∈ (rw,Rw). Die Reihe in(11.37) heißt Laurentreihe um w im Bereich URw(w) \ Krw(w).
Beweis. Seien r,R ∈ (rw,Rw) mit r < R. Für ζ ∈ C mit |ζ − w| = R und für z ∈ UR(w) gilt
1ζ − w
·∞∑
n=0
(z − wζ − w
)n
=1
ζ − w· 1
1 − z−wζ−w
=1
ζ − z.
Analog erhalten wir für ζ ∈ C mit |ζ − w| = r und z ∈ C \ Kr(w)
1z − w
·∞∑
n=0
(ζ − wz − w
)n
=1
z − w· 1
1 − ζ−wz−w
= − 1ζ − z
.
Aus (11.35) folgt
f (z) =1
2πi
∫
γR
∞∑
n=0
(z − wζ − w
)n
· f (ζ)ζ − w
dζ +1
2πi
∫
γr
∞∑
n=0
(ζ − wz − w
)n
· f (ζ)z − w
dζ
=
∞∑
n=0
(z − w)n 12πi
∫
γR
f (ζ)(ζ − w)n+1 dζ +
∞∑
n=0
(z − w)−n−1 12πi
∫
γr
f (ζ)(ζ − w)−n dζ
=
+∞∑
n=−∞(z − w)nan ,

11.8 Nochmals komplexe Differenzierbarkeit* 403
wobei an = 12πi
∫γR
f (ζ)(ζ−w)n+1 dζ für n ≥ 0 und an = 1
2πi
∫γr
f (ζ)(ζ−w)n+1 dζ für n < 0. Da die
betrefflichen Reihen gleichmäßig konvergieren, dürfen Integrale und Reihen vertauschtwerden, womit die beiden Reihen rechts vom zweiten Gleichheitszeichen konvergierenund eben diese Gleichheit gilt; vgl. Beweis von Lemma 11.6.16. Dass die an einheitlich inder Form (11.38) für jedes ρ ∈ (r,R) geschrieben werden können, folgt aus Bemerkung11.6.11.Da r,R ∈ (rw,Rw) mit r < R beliebig waren und da wegen (11.38) die an unabhängigvon r,R sind, ist die Reihenentwicklung für alle z ∈ URw(w) \ Krw(w) gültig. Insbesonderekonvergiert
∑+∞n=0 ζ
nan für |ζ | ∈ (rw,Rw) und∑+∞
n=1 ζna−n für | 1
ζ| ∈ (rw,Rw). Daraus folgt die
getroffene Aussage über die jeweiligen Konvergenzradien dieser Reihen. q
11.8 Nochmals komplexe Differenzierbarkeit*
Wir werden in diesem Abschnitt zeigen, dass f : D → Y genau dann holomorph ist,wenn f bei allen z ∈ D komplex differenzierbar ist. Man kann also bei der Definition derHolomorphie in Definition 11.6.5 auf die Stetigkeit von f ′ verzichten.
11.8.1 Lemma. Sei R ⊆ C ein offenes Rechteck. Sei f : R → Y bei jedem z ∈ Rdifferenzierbar, und es gelte f
∂y(z) = i f∂x (z) für alle z ∈ R. Eine gemäß Lemma 11.6.4
äquivalente Forderung ist, dass f bei allen z ∈ R komplex differenzierbar ist.Ist weiters das Rechteck [α1, β1] × [α2, β2] in R enthalten, so gilt
∫
γ1
f (z) dz =
∫
γ2
f (z) dz , (11.39)
wobei γ1 =−−−−−→(α1α2
)(β1α2
),−−−−−→(β1α2
)(β1β2
)und γ2 =
−−−−−→(α1α2
)(α1β2
),−−−−−→(α1β2
)(β1β2
).
Beweis. Aus der Differenzierbarkeit von f folgt seine Stetigkeit bei allen z ∈ R; vgl. Fakta10.1.14, 2. Somit existieren die obigen komplexen Wegintegrale. Außerdem ist (11.39)dazu äquivalent, dass
I(Q) :=∫
∂Qf (z) dz
verschwindet, wobei Q = [α1, β1] × [α2, β2] und ∂Q der geschlossene Polygonzug
−−−−−−−→(α1
α2
) (β1
α2
),
−−−−−−−→(β1
α2
) (β1
β2
),
−−−−−−−→(β1
β2
) (α1
β2
),
−−−−−−−→(α1
β2
) (α1
α2
)
ist. Unterteilen wir Q in die vier gleich großen Rechtecke
Q1kl := [0,
β1 − α1
2] × [0,
β2 − α2
2] +
(α1
α2
)+
(k · β1−α12
l · β2−α22
), k, l = 0, 1 ,

404 11 Wegintegrale
so folgt
I(Q) =
∫
∂Qf (z) dz =
1∑
k,l=0
∫
∂Q1k,l
f (z) dz
︸ ︷︷ ︸:=I(Q1
k,l)
,
da sich die Wegintegrale über die inneren Polygonzüge wegheben und die über die äußerenPolygonzüge aufaddieren.Wäre nun I(Q) , 0, so hätten wir auch I(Q1
k,l) , 0 für zumindest ein Paar k, l ∈ {0, 1}.Seien nun k1, l1 ∈ {0, 1}, sodass ‖I(Q1
k1,l1)‖ ≥ ‖I(Q1
k,l)‖ für alle k, l ∈ {0, 1}. Offenbar giltdann
‖I(Q)‖ ≤1∑
k,l=0
‖I(Q1k,l)‖ ≤ 4‖I(Q1
k1,l1)‖ .
Nun unterteilen wir jedes der Rechtecke Q1k,l in vier gleich großen Rechtecke und erhalten
insgesamt die 16 Rechtecke Q2k,l, k, l = 0, . . . , 3. Unter den in Q1
k1,l1enthaltenen Rechtecken
aus {Q2k,l : k, l = 0, . . . , 3} wählen wir eines – Q2
k2,l2, k2, l2 ∈ {0, . . . , 3} – aus, sodass
‖I(Q2k2,l2
)‖ maximal ist, womit ‖I(Q1k1,l1
)‖ ≤ 4‖I(Q2k2,l2
)‖.Setzen wir diese Prozedur fort, so haben wir im n-ten Schritt Q in 4n Rechtecke
Qnk,l := [0,
β1 − α1
2n ] × [0,β2 − α2
2n ] +
(α1
α2
)+
(k · β1−α12n
l · β2−α22n
), k, l = 0, . . . , 2n − 1 ,
unterteilt, auf dass∑2n−1
k,l=0 I(Qnk,l) = I(Q). Zudem sind kn, ln ∈ {0, . . . , 2n − 1}, sodass
Qnkn,ln ⊆ Qn−1
kn−1,ln−1und ‖I(Qn
kn,ln)‖ = max{‖I(Qnk,l)‖ : Qn
k,l ⊆ Qn−1kn−1,ln−1
} ,womit ‖I(Qn−1
kn−1,ln−1)‖ ≤ 4‖I(Qn
kn,ln)‖.
Da die Rechtecke Qnkn,ln
, n ∈ N ineinander geschachtelt sind, erfüllt diese Mengenfolgebestehend aus kompakten Mengen die endliche Durchschnittseigenschaft; vgl. Proposition12.11.2. Infolge ist
⋂n∈N Qn
kn,lnnichtleer. Da aber die Durchmesser d(Qn
kn,ln) von Qn
kn,lnfür
n→ ∞ gegen Null konvergieren, ist dieser Durchschnitt einpunktig:⋂
n∈N Qnkn,ln
= {w}.Die noch nicht verwendete Tatsache, dass f insbesondere bei w komplex differenzierbarist, besagt, dass f (z) = f (w) + (z − w) f ′(w) + |z − w|ε(z) mit limz→w ε(z) = 0. Aus derLinearität von Wegintegralen folgt
I(Qnkn,ln) =
∫
∂Qnkn ,ln
(f (w) + (z − w) f ′(w)
)dz +
∫
∂Qnkn ,ln
|z − w| ε(z) dz .
Da z 7→ f (w) + (z − w) f ′(w) holomorph ist, folgt aus (11.24) und Korollar 11.6.10
‖I(Qnkn,ln)‖ =
∥∥∥∥∥∫
∂Qnkn ,ln
|z − w| ε(z) dz∥∥∥∥∥ ≤ `(∂Qn
kn,ln) d(Qnkn,ln) sup
z∈Qnkn ,ln
‖ε(z)‖ .
Wegen `(∂Qnkn,ln
) = 12n `(∂Q) und d(Qn
kn,ln) = 1
2n d(Q) folgt
‖I(Q)‖ ≤ 41‖I(Q1k1,l1)‖ ≤ · · · ≤ 4n‖I(Qn
kn,ln)‖ ≤ 4n 14n `(∂Q) d(Q) sup
z∈Qnkn ,ln
‖ε(z)‖ n→∞−→ 0 .

11.9 Harmonische Funktionen* 405
Also gilt I(Q) = 0 im Gegensatz zu unserer Annahme I(Q) , 0. q
11.8.2 Satz. Sei Y ein Banachraum über C, D ⊆ C offen. Eine Funktion f : D → Y istgenau dann holomorph, wenn f bei allen z ∈ D komplex differenzierbar ist.
Beweis. Definitionsgemäß ist jede holomorphe Funktion komplex differenzierbar; vgl.Definition 11.6.5. Sei nun f : D→ Y überall komplex differenzierbar, w ∈ D und δ > 0 soklein, dass das Quadrat D(w) := U‖.‖∞δ (w) ganz in D enthalten ist. Wir können also Lemma11.8.1 auf R = D(w) anwenden.Definieren wir φ f : D(w)→ L(R2,Y) durch φ f (z) = (
(ξη
)7→ (ξ + iη) f (z)), so kann wegen
(11.22) die Gleichung (11.39) auch als∫
γ1
φ f (x) dx =
∫
γ2
φ f (x) dx
angeschrieben. Insbesondere sind die Voraussetzungen von Lemma 11.4.6 erfüllt, wo-mit sich φ f auf D(w) als Gradientenfeld und infolge auf D als lokales Gradientenfeldherausstellt. Nach Satz 11.6.15 ist f holomorph auf D. q
11.9 Harmonische Funktionen*Wir wollen in diesem Anschnitt den Zusammenhang von komplexwertigen, holomorphenFunktionen und sogenannten harmonischen Funktionen beleuchten.
11.9.1 Definition. Ist g : G → C mit offenem G ⊆ R2 � C zweimal stetig differenzierbar,so bezeichnet ∆g : G → C (Laplace g) die Abbildung
∆g(xy
):=
∂2g∂x2
(xy
)+∂2g∂y2
(xy
).
Funktionen g : G → C, g ∈ C2(G) heißen harmonisch, falls ∆g ≡ 0.
Da die Ableitungen eintragsweise berechenbar sind, ist g offenbar genau dann harmonisch,wenn Re g und Im g es sind.
11.9.2 Proposition. Ist G ⊆ C offen und f : G → C holomorph, so ist f auch harmonisch.Insbesondere sind dann Real- und Imaginärteil von f harmonisch.Ist umgekehrt u : G → R harmonisch für ein einfach zusammenhängendes Gebiet G ⊆ C,so gibt es ein bis auf eine imaginäre Konstante eindeutiges holomorphes f : G → C,sodass u ≡ Re f .
Beweis. Ist f : G → C holomorph, so gilt (11.25). Da holomorphe Funktionen beliebigoft differenzierbar sind, folgt aus dieser Gleichung abgeleitet nach x bzw. nach y und demSatz von Schwarz, Satz 10.2.3,
i∂2 f∂x2 (z) =
∂2 f∂x∂y
(z) = (−i)∂2 f∂y2 (z) ,

406 11 Wegintegrale
woraus wir ∆ f = 0 erhalten. Infolge ist f und daher auch u = Re f sowie v = Im fharmonisch.Ist umgekehrt u : G → R harmonisch und G ⊆ C einfach zusammenhängendes Gebiet,so setzen wir α(z) := ∂u
∂x (z), β(z) := −∂u∂y (z) und F := α + iβ. Dann sind α : G → R,
β : G → R und F : G → C alle drei C1-Funktionen, wobei wegen ∆u = 0 und wegen desSatzes von Schwarz
∂F∂x
(z) =∂α
∂x(z) + i
∂β
∂x(z) =
∂2u∂x2 (z) − i
∂2u∂x∂y
(z)
= −∂2u∂y2 (z) − i
∂2u∂y∂x
(z) =∂β
∂y(z) − i
∂α
∂y(z) = −i · ∂F
∂y(z) .
Somit ist F holomorph. Da G einfach zusammenhängend ist, gibt es eine HolomorpheStammfunktion f , also ein f : G → C mit f ′ = F; vgl. Korollar 11.6.10. Wegen f ′ =
∂ f∂x =
−i∂ f∂y gilt
∂ Im f∂y
=∂Re f∂x
= Re F = α =∂u∂x
und
−∂Re f∂y
=∂ Im f∂x
= Im F = β = −∂u∂y
.
Insbesondere ist d(Re f )(z) = du(z) (∈ L(R2,R)) für alle z ∈ G. Wegen Satz 11.4.1 und dain G je zwei Punkte durch einen Polygonzug verbindbar sind, folgt daraus Re f = u + c fürein c ∈ R. Nun ist f − c die gesuchte holomorphe Funktion.Falls g : G → C eine weitere holomorphe Funktion mit Re g = u ist, so ist f−c−g : G → Cauch holomorph mit einem verschwindenden Realteil. Aus den Cauchy-RiemannschenDifferentialgleichungen folgt d( f − c− g)(z) = 0 und daraus, dass f − c− g eine Konstantesein muss; vgl. Satz 11.4.1. q
11.10 Übungsaufgaben
11.1 Man berechne die Länge der Wege γ : [0, 1]→ R2:
γ(t) =
(t
t32
), γ(t) =
(t
cosh(t)
),
und gebe die zu den γ’s äquivalenten Wege β an, sodass der Parameter von β die Bogenlängeist.
11.2 Man zeige, dass γ : [0, 1]→ R2 mit γ(0) = 0 und γ(t) = (t, t2 cos πt2 )T , t > 0 zwar stetig, aber
nicht rektifizierbar ist.
Hinweis: Berechne L(Z) fürZ = {0, 1√n, 1√
n−1, . . . , 1√
2, 1}.

11.10 Übungsaufgaben 407
11.3 Sei γ1 : [0, 1]→ Rn, γ2 : [1, 2]→ Rn und γ3 : [0, 2]→ Rn mit γ3(t) = γ1(t), t ∈ [0, 1) undγ3(t) = γ2(t), t ∈ [1, 2]. Es gilt nicht notwendigerweise γ1(1) = γ2(1)! Weiters sei γ1 bei 1stetig, und seien γ1 und γ2 rektifizierbar. Man zeige, dass dann auch γ3 rektifizierbar ist mit`(γ3) = `(γ1) + `(γ2) + ‖γ2(1) − γ1(1)‖2!
Hinweis: Man zeige zunächst, dass limZ∈Z,1∈Z ‖γ2(1) − γ1(ξ j(Z))‖2 = ‖γ2(1) − γ1(1)‖2 unddass limZ∈Z,1∈Z ‖γ1(1) − γ1(ξ j(Z))‖2 = 0, wobei Z die Menge aller Zerlegungen von [0, 2] ist,und ξ j(Z) das größte Element vonZ ist, welches kleiner 1 ist.
11.4 Man betrachte f : [a, b] → R. Ist f rektifizierbar, so sagt man in diesem Fall (Rn = R),dass die Funktion f von beschränkter Variation ist, und setzt Vy
x( f ) := `( f |[x,y]), wenna ≤ x ≤ y ≤ b. Man zeige:
(i) Sind f , g von beschränkter Variation und λ ∈ R, so auch f + g und λ f , wobei
Vyx( f + g) ≤ Vy
x( f ) + Vyx(g) und Vy
x(λ f ) = |λ|Vyx( f ) .
(ii) Ist f monoton wachsend, so gilt Vyx( f ) = f (y) − f (x).
(iii) Ist f Differenz zweier monoton wachsender Funktionen, so ist f von beschränkterVariation.
(iv) Ist f : [a, b] → R von beschränkter Variation, so gilt f = g − h für zwei monotonwachsende Funktionen g, h.
Hinweis: Setze g(t) = V ta( f ) und zeige von h, dass es dann monoton wächst!
11.5 Man gebe eine Formel für die Länge des Weges γ : [0, π2 ] → R2 an, der durch γ(t) =
( f (t) cos t, f (t) sin t)T definiert ist, wobei f ∈ C1.
Man berechne die Bogenlänge speziell für die Archimedische Spirale: f (t) = t!
11.6 Man betrachte den Weg im R3 mit folgender Parameterdarstellung (Schraubenlinie):
γ(t) =
r cos tr sin t
ht
, t ∈ [0, 4π] .
Hierbei seien r, h > 0 fest gewählt. Zeichnen Sie eine Skizze! Weiters berechne man dieBogenlänge, und parametrisiere γ(t) nach der Bogenlänge um. Daher schreibe γ(t) als γ(t(s)),sodass die Bogenlänge der Kurve von γ(0) bis γ(t(s)) genau s ist.
11.7 Sei β : [0, c] → Rp ein stetig differenzierbarer Weg. Zeigen Sie, dass der Tangentialvektorβ′(s) für alle s ∈ [0, c] genau dann Länge eins hat, wenn β die Eigenschaft aus Bemerkung11.1.12 hat, also wenn die Weglänge von β|[0,s] für alle s ∈ [0, c] mit s übereinstimmt.
11.8 Man berechne das Wegintegral∫γ((x2 + 5y + 3yz) dx + (5x + 3xz− 2) dy + (3xy− 4z)dz), wobei
γ : [0, 2π]→ R3, γ(t) = (sin(t), cos(t), t)T .
Schreibweise: Wegintegrale∫γφ(x) dx von Vektorfeldern φ : D → L(R3,R), also
φ((ξ, η, ζ)T ) = (P(ξ, η, ζ),Q(ξ, η, ζ),R(ξ, η, ζ)) werden auch oft als∫
γP(ξ, η, ζ) dξ + Q(ξ, η, ζ) dη + R(ξ, η, ζ) dζ .
angeschrieben. Entsprechendes gilt für Vektorfeldern φ : D→ L(R2,R).

408 11 Wegintegrale
11.9 Sei γ : [0, 1]→ D ein gerade Strecke, also γ(t) = tx1 + (1 − t)x0, und sei φ stetig. Man zeige,dass dann ∫
γφ(x) dx =
(∫ 1
0φ(tx1 + (1 − t)x0
)dt
)
︸ ︷︷ ︸∈Lb(Rn,X)
(x1 − x0) .
11.10 Man berechne das Wegintegral∫γφ(x) dx, wobei γ : [0, 1]→ R2, γ(t) = (
√t, t)T und
φ : R2 → L(R2,R2) � R2×2, φ((x, y)T ) =
(ex ey
x y
).
11.11 Man betrachte den stetigen Weg γ : [0, 1] → R2, γ(t) = (1 + t2, 1 + t3)T . Man bestimmedie Weglänge von γ und berechne das Wegintegral
∫γφ(x) dx, wobei φ : (1,+∞) × R →
L(R2,R) � R1×2, φ((x, y)T ) = (sin(√
x − 1 ), xy).
11.12 Seien f , g : [a, b]→ R beschränkt. Man identifiziere für X = R und n = 1 den Raum L(Rn, X)mit R, um gemäß Definition 11.2.2 P( f , g;R) bzw. P(g, f ;R) bilden zu können.
Weiters seien R1 = ((ξ j)mj=0; (α j)m
j=1) und R2 = ((η j)m+1j=0 ; (β j)m+1
j=1 ) Riemann-Zerlegungen mitη j = α j, j = 1, . . . ,m und β1 = a, βm+1 = b, β j = ξ j−1, j = 2, . . . ,m.
Man zeige: P( f , g;R1) = f (b)g(b) − f (a)g(a) − P(g, f ;R2), wobei
P( f , g;R1) =
m∑
j=1
f (α j)(g(ξ j) − g(ξ j−1)) ,
P(g, f ;R2) =
m+1∑
j=1
g(β j)( f (η j) − f (η j−1)) ,
und leite daraus her, dass∫ b
a f dg genau dann existiert, wenn∫ b
a gd f existiert, und in diesemFall gilt: ∫ b
af dg = f (b)g(b) − f (a)g(a) −
∫ b
ag d f .
Hinweis: Man leite aus Lemma 3.10.5 zunächst folgendes her:
m∑
n=1
an(bn − bn−1) = ambm − a1b0 −m−1∑
n=1
(an+1 − an)bn .
11.13 Sei γ : [a, b] → Rn rektifizierbar und man denke sich den Weg γ mit Masse belegt, sodassan der Stelle t ∈ [a, b] die Dichte (Masse pro Längeneinheit) ρ(t) ist. Die Gesamtmasse desWeges berechnet sich durch das Riemann-Stieltjes-Integral
M =
∫ b
aρ d` ,
wobei `(x) = `(γ|[a,x]) (Weglänge des auf [a, x] eingeschränkten Weges), und der Schwerpunktdurch
1M
∫ b
af d` ,

11.10 Übungsaufgaben 409
wobei f : [a, b]→ L(R,R2) � R2×1, f (t) = ρ(t)γ(t).
Man berechne für den Weg γ : [0, 1]→ R2, γ(t) = (t, t2)T , der mit konstanten Dichte ρ = 1die Gesamtmasse und den Schwerpunkt.
11.14 Ist das Vektorfeld φ : R3 → L(R3,R) � R1×3 ein Gradientenfeld? Falls ja, berechne man dieStammfunktion, also ein f , sodass d f = φ! Dabei ist
(i) φ((ξ, η, ζ)T ) = (ξ + ζ, ξ + η + ζ, ξ + ζ)
(ii) φ((ξ, η, ζ)T ) = (2ξ, 2η, 0)
(iii) φ((ξ, η, ζ)T ) = (ηζ, ξζ, ξ2)
11.15 Ist das Vektorfeld φ : R3 → L(R3,R) � R1×3 ein Gradientenfeld? Falls ja, berechne man dieStammfunktion, also ein f , sodass d f = φ! Dabei ist
(i) φ((ξ, η, ζ)T ) = (1, 1, 1)
(ii) φ((ξ, η, ζ)T ) = (−ξ,−η,−ζ)
(iii) φ((ξ, η, ζ)T ) = (η3, 2, ξ2)
11.16 Man betrachte D = R2 \ {0} und φ : D→ L(R2,R) definiert durch φ(x, y)T = ( −yx2+y2 ,
xx2+y2 ).
Man berechne zunächst das Wegintegral dieser Funktion über den in positiver Richtungdurchlaufenen Einheitskreis (γ(t) = (cos t, sin t)T , 0 ≤ t ≤ 2π)!
Nun zeige man, dass auf D die Bedingung (11.9) erfüllt ist und zeige, dass es auf der rechtenoffenen Halbebene R2 \ {(x, y)T : x ≤ 0} eine reellwertige Funktion f ∈ C1 gibt, sodass dortd f = φ.
Kann es so eine Funktion f auf ganz D geben?
11.17 Im einfach zusammenhängenden Gebiet G = {(ξ, η, ζ)T ∈ R3 : η > 0, ζ > 0} sei K : G →L(R3,R) � R1×3 durch
K((ξ, η, ζ)T ) =
(ln(ζη),
ξ
η, βξ
ζ
),
mit einem festen β ∈ R definiert. Für welchen Wert von β ist K ein Gradientenfeld?
Für die geradlinige Verbindung γ von (0, 1, 1)T nach (ξ0, η0, ζ0)T in G berechne man man dasWegintegral
∫γ
K(x) dx in den Fällen β = 1 und β = 2.
11.18 Seien x0 = (1, 1)T , x1 = (−1, 1)T , x2 = (−1,−1)T , x3 = (1,−1)T , sei γ(t) :=√2(cos t, sin t)T , t ∈ [π4 , 2π + π
4 ], und seien ρ >√
2 sowie w ∈ U‖.‖∞1 (0) ⊆ R2. ZeigenSie, dass γ : [π4 , 2π + π
4 ] → R2 in U‖.‖2ρ (0) \ {w} homotop zu β : [π4 , 2π + π4 ] → R2 ist,
wobei β äquivalent zum Polygonzug −−−→x0x1,−−−→x1x2,
−−−→x2x3,−−−→x3x0 ist mit einem linearen α, sodass
β = −−−→x0x1,−−−→x1x2,
−−−→x2x3,−−−→x3x0 ◦ α.
11.19 Sei k ∈ Z und γ : [0, 2π]→ C definiert durch γ(t) = a + r exp(it) mit festem, aber beliebigemr > 0 und a ∈ C. Berechnen Sie das folgende komplexe Wegintegral direkt, also ohneZuhilfenahme der Cauchyschen Integralformel bzw. ihres Korollars:
∫
γ(z − a)k dz .

410 11 Wegintegrale
11.20 Man berechne wieder ohne Cauchyscher Integralformel das komplexe Wegintegral∫γ
1z−w dz,
wobei γ(t) = exp(it), t ∈ [0, 2π], und |w| , 1.
Hinweis: Ist |w| > 1, so gilt 1z−w = − 1
w∑∞
n=0zn
wn , und ist |w| < 1, so gilt 1z−w = 1
z∑∞
n=0wn
zn .Begründen Sie allfällige Vertauschungen von Limes und Integral!
11.21 Ist f : D→ C im Punkt z ∈ D komplex differenzierbar, so zeige man, dass det d f (z) = | f ′(z)|2.
11.22 Sei h : C \ [−∞, 0] → C definiert durch h(z) = ln |z| + i arg(z). Dabei ist das Argumentarg(ξ + iη) ∈ (−π, π) so definiert, dass f (
√ξ2 + η2, arg(ξ + iη))T = (ξ, η)T , wobei f (r, φ)T =
(r cos φ, r sin φ)T . Zeigen Sie, dass h holomorph ist, und berechnen Sie h′(z)!
Anmerkung: h wird als komplexer Logarithmus bezeichnet. In der Tat erfüllt h die Beziehungexp(h(z)) = z, z ∈ C \ [−∞, 0], und h(exp(z)) = z für z ∈ R × (−π, π).
11.23 Sei D ⊆ C ein Gebiet und f : D→ C holomorph. Zeigen Sie, dass f konstant ist, wenn f nurWerte aus R (⊆ C) oder nur Werte aus iR (⊆ C) annimmt.
Hinweis: Was gilt für d f (z)?
11.24 Für w ∈ C und einen geschlossenen, stetigen und stückweise stetig differenzierbaren Wegγ : [a, b]→ C mit w < γ([a, b]) ist die Umlaufzahl von γ um w definiert durch
n(γ,w) :=1
2iπ
∫
γ
1z − w
dz .
Zeigen Sie, dass n(γ,w) ∈ Z.
Hinweis: Setzen Sie g(t) :=∫ t
aγ′(s)γ(s)−w ds und leiten dann e−g(t)(γ(t) − w) nach t ab. Was
bedeutet das Ergebnis, wenn Sie e−g(b) und e−g(a) vergleichen?
11.25 Sei γ : [a, b]→ C stetig und stückweise stetig differenzierbar aber nicht notwendigerweisegeschlossen. Zeigen Sie, dass dann die Abbildung
w 7→ 12iπ
∫
γ
1z − w
dz
von C \ γ([a, b]) nach C stetig ist.
11.26 Mit der Notation aus dem vorletzten Beispiel sei γ ein fester geschlossener, stetiger und stetigdifferenzierbarer Weg . Weiters sei G ⊆ C ein Gebiet, sodass γ([a, b]) ∩G = ∅. Zeigen Sie,dass n(γ,w) für alle w ∈ G denselben Wert ergibt.
Zeigen Sie auch, dass dieser Wert Null ist, falls G nicht beschränkt ist.
11.27 Nun sei H ⊆ C ein einfach zusammenhängendes Gebiet und w ∈ C \ H. Zeigen Sie, dass fürjeden geschlossenen, stetigen und stetig differenzierbaren Weg γ : [a, b] → H (also jedenWeg der in H verläuft) immer n(γ,w) = 0 gilt.
11.28 Überprüfen Sie die Kettenregel für holomorphe Funktionen auf 2 verschiedene Arten. Einmalähnlich wie die eindimensionale Kettenregel aus dem Kapitel 7, und ein zweites mal mit Hilfeder mehrdimensionalen Kettenregel.

11.10 Übungsaufgaben 411
11.29 Sei D ⊆ C offen, f : D → Y stetig und γ : [a, b] → D ein stetiger, stückweise stetigdifferenzierbarer und geschlossener Weg. Zeigen Sie, dass γ genau eine stetige Fortsetzungenβ : R → D hat, die periodisch ist, also β(t) = β(t + (b − a)) für t ∈ R erfüllt. Zeigen Sieauch, dass für jedes s ∈ R der Weg β|[a+s,b+s] stetig, stückweise stetig differenzierbar undgeschlossen ist, wobei ∫
γf (z) dz =
∫
β|[a+s,b+s]
f (z) dz .
Anmerkung: Mit diesem Beispiel erkennt man, dass die Cauchysche Integralformel aus Satz11.6.12 auch richtig ist für Wege γs
ρ : [s, 2π + s] → C mit festem s ∈ R, wobei γsρ(t) =
w + ρ exp(it) mit ρ > 0, sodass Kρ(w) ⊆ D. Weiters stimmt die Cauchysche Integralformelauch für Wege γ, die zu γs
ρ in D \ {z} homotop sind.
11.30 Für j = 1, 2 seien R j = [a j, b j] × [c j, d j] ⊆ C zwei Rechtecke, wobei R1 ⊆ R◦2 := (a2, b2) ×(c2, d2). Weiters sei f : D → Y holomorph, wobei D offen in C ist und R2 \ R◦1 umfasst.Zeigen Sie, dass
∫γ1
f (z) dz =∫γ2
f (z) dz, wobei γ j derjenige Polygonzug ist, der, startend bei(a j, c j)T , den Rand von R j gegen den Uhrzeigersinn durchläuft.
Hinweis: Werfen Sie einige Blicke auf Bemerkung 11.6.11.
11.31 Sei f : D → Y holomorph, wobei R := [a, b] × [c, d] ⊆ D, und sei z ∈ R◦ := (a, b) × (c, d).Zeigen Sie, dass die Cauchysche Integralformel (11.31) auch für γ richtig ist, wobei γ einPolygonzug ist, der den Rand von R gegen den Uhrzeigersinn durchläuft.
Hinweis: Verwenden Sie eine geeignete Variante von 11.18 sowie 11.29 und 11.30.
11.32 Weisen Sie die Holomorphie der Funktionen exp : C → C, cos : C → C und sin : C → C
nach, indem sie die Cauchy-Riemannschen Differentialgleichungen und die stetige Diffe-renzierbarkeit zeigen! Weiters gebe man in dem Fall jeweils eine Stammfunktion dieserFunktionen f an (also das F mit F′ = f )! Schließlich gebe man auch eine Stammfunktionvon z2(cos z)2 an!
11.33 Sei D ⊆ C offen und f : D→ C holomorph. Man zeige, dass ∆ Re f = ∆ Im f = 0 und dass∆(| f |2) ≥ 0; vgl. Übungsbeispiel 10.15.
11.34 Verwenden Sie das vorherige Beispiel und Übungsbeispiel 10.15, um zu zeigen, dass wennG ⊆ C offen und f : G → C holomorph ist, dann für jedes w ∈ G und ρ > 0 mit Kρ(w) ⊆ Gfür alle ζ ∈ Uρ(w)
| f (ζ)| ≤ maxz∈Kρ(w)\Uρ(w)
| f (z)| ,
minz∈Kρ(w)\Uρ(w)
Re f (z) ≤ Re f (ζ) ≤ maxz∈Kρ(w)\Uρ(w)
Re f (z) ,
minz∈Kρ(w)\Uρ(w)
Im f (z) ≤ Im f (ζ) ≤ maxz∈Kρ(w)\Uρ(w)
Im f (z)
gilt.
11.35 Sei G ⊆ C ein Gebiet und seien f , g : G → Y zwei holomorphe Funktionen. Man zeige, dassf ≡ g, falls f (z) = g(z) für alle z ∈ E, wobei E ⊆ G mindestens einen Häufungspunkt in Ghat.

412 11 Wegintegrale
Hinweis: Zeigen Sie, dass A = {z ∈ G : ∃ε > 0, f |Uε (z) ≡ g|Uε (z)} offen und nicht-leer ist;werfen Sie dafür einen Blick auf Korollar 6.8.9 bzw. Fakta 9.3.9, 5. Zeigen Sie auch, dassc(A) ∩G = A. Nun betrachte man B := G \ c(A)....
11.36 Man leite die Potenzreihenentwicklung von z2(cos z)2 um den Punkt 0 her! Wie groß ist derKonvergenzradius dieser Potenzreihe?
11.37 Sei D ⊆ C offen und f : D → C holomorph. Zeigen Sie, dass dann auch f ∗ : D̄ → C
holomorph ist, wobei D̄ = {z̄ : z ∈ D} und f ∗(z) = f (z̄).
11.38 Zeigen Sie, dass die Funktion f (x) aus 6.29 auch für x ∈ C \ Z eine wohldefinierte komplex-wertige Funktion ist. Zeigen Sie, dass diese Funktion auch holomorph ist.
11.39 Zeigen Sie, dass die Funktion f (z) aus dem vorherigen Beispiel für alle z ∈ C \ Z mitz 7→ π2
sin2(πz)übereinstimmt.
11.40 Berechnen Sie für die Funktion f (z) = 1z+1 + 1
z−1
∫
γ1
f (z) dz +
∫
γ2
f (z) dz und∫
γ3
f (z) dz ,
wobei γ j : [0, 2π] → C ( j = 1, 2, 3) mit γ j(t) = (−1) j + 12 exp(it) für j = 1, 2 und γ3(t) =
4 exp(it). Skizze!