Fused-Silica Micro Birdbath Resonator Gyroscope ($\mu$-BRG)
12
66 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 23, NO. 1, FEBRUARY 2014 Fused-Silica Micro Birdbath Resonator Gyroscope (μ-BRG) Jae Yoong Cho, Member, IEEE, Jong-Kwan Woo, Member, IEEE, Jialiang Yan, Rebecca L. Peterson, Member, IEEE, and Khalil Najafi, Fellow, IEEE Abstract— We present a 3-D fused-silica micro-scale shell gyroscope, called the birdbath resonator gyroscope (BRG). The BRGs axisymmetric geometry leads to a good frequency and Q symmetry. The birdbath resonator can be fabricated with a good structural symmetry because its anchor is self-aligned to the rest of the structure. The BRG has n = 2 wine-glass modes at 10.5 kHz and has a large frequency separation between the n = 2 wine-glass modes and the closest parasitic mode (| f parasitic − f n=2 |/ f n=2 = 0.3), which will potentially lead to a low vibration sensitivity. The equations of motion for 3-D shell gyroscopes are derived and the effective mass and angular gain of the BRG is estimated using finite element method (FEM). The BRG is fabricated using a 3-D micrometer-blow-torching process and assembly on an electrode substrate made with the silicon-on- glass process. The BRG is operated in the force-rebalance mode at <1 mTorr vacuum at room temperature and has a scale factor of 27.9 mV/(deg/s), a full-scale range >400 deg/s, an angle random walk of 0.106 deg/ √ h, and a bias stability of 1 deg/h. A large angular gain (0.317) is measured, which is close to the estimated value of 0.25 obtained via FEM. [2013-0277] Index Terms— Gyroscope, fused silica, blowtorch, angular gain, effective mass, quality factor. I. I NTRODUCTION A DVANCES in microelectromechanical systems (MEMS) technologies in recent years have made it possible to create micro-scale gyroscopes with higher precision and lower cost. Micro-gyroscopes are currently used in a wide range of applications including consumer, automotive, aerospace, and military. Most micro-gyroscopes are of the vibratory type [1], because they occupy a small area and consume low power. Conventional MEMS materials such as silicon (Si) can achieve a very high mechanical quality factor ( Q > 1 million [2]), which produces a large Coriolis force. The fabrication of very- high-aspect-ratio Si microstructures has been realized due to advances in deep-reactive-ion etching (DRIE). Vibratory gyroscopes measure rotation rate () or angle (θ) by detecting changes in the vibration patterns caused by Manuscript received September 4, 2013; accepted November 8, 2013. Date of publication November 26, 2013; date of current version January 30, 2014. This work was supported in part by DARPA MRIG under Award W31P4Q-11- 1-0002, in part by the Lurie Nanofabrication Facility, in part by the National Nanotechnology Infrastructure Network, and in part by the National Science Foundation. Subject Editor C. Rembe. The authors are with Wireless Integrated MicroSensing and Systems, University of Michigan, Ann Arbor, MI 48109 USA (e-mail: jycho@ umich.edu; [email protected]; [email protected]; [email protected]; najafi@umich.edu). Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org. Digital Object Identifier 10.1109/JMEMS.2013.2291534 the Coriolis force. Depending on whether they measure or θ , they are categorized as rate gyroscopes (RG) or rate-integrating gyroscopes (RIG), respectively. The RG is operated by sustaining the vibration of a proof mass along the primary (drive) axis at its resonant frequency ( f ) and measuring the amplitude of vibration along the secondary (sense) axis, which is orthogonal to the drive axis. The amplitude of vibration along the sense axis is proportional to , and this type of RG is called the open-loop-mode RG. A RG can also be realized by measuring the amplitude of a force that nulls the motion along the sense axis, which is proportional to . This type of RG is called the closed-loop- mode RG. Closed-loop-mode RGs have a lower scale factor than open-loop-mode RGs; however, they can achieve wider bandwidth (BW ) and larger full-scale range (FSR), which can be controlled with the force-rebalance-loop parameters. They keep better bias stability over the change of Q and f than the open-loop-mode RG, which makes them more suitable in a larger range of applications. Methods for RGs to achieve good stability by continuously calibrating their scale factors [3] and differentially canceling bias drifts using a mode-reversal technique have been reported [4], [5]. The RIG is controlled by sustaining the amplitudes of the two resonant modes and measuring the angle of the precession of the vibration wave around the rotation axis caused by the Coriolis force. The change of the precession angle (θ prec ) is the change of the rotation angle (θ) times a scale factor called the angular gain ( A g ). A g is a stable constant determined solely by the shape of the gyroscope. RIGs can directly measure θ , which makes them very useful in position measurement in GPS-denied environments. The RIG can also calculate by taking the time derivative of θ . RIGs can also achieve large BW and FSR. The key challenge for RIGs, however, is that their bias drift is a direct function of the differences in the frequency ( f ) and inverse decay time constant (1/ τ , where τ = Qπ −1 f 1 ) of their two resonant modes [6]. Therefore RIGs require a very symmetric geometry with a very long τ . Methods for extending the RG BW and FSR by mea- suring modulated f [2], [7] and increasing the resonance mode f [8] have been reported. The bias of the frequency- modulation (FM) gyroscopes, however, also suffers due to f and 1/ τ , which makes it similarly challenging to achieve high performance as the RIG. A high- f gyroscope such as the bulk-acoustic-wave (BAW) gyroscope achieves a large BW even in the open loop mode, because the BW of a resonant 1057-7157 © 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
Transcript of Fused-Silica Micro Birdbath Resonator Gyroscope ($\mu$-BRG)

66 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 23, NO. 1, FEBRUARY 2014
Fused-Silica Micro Birdbath Resonator Gyroscope(μ-BRG)
Jae Yoong Cho, Member, IEEE, Jong-Kwan Woo, Member, IEEE, Jialiang Yan,Rebecca L. Peterson, Member, IEEE, and Khalil Najafi, Fellow, IEEE
Abstract— We present a 3-D fused-silica micro-scale shellgyroscope, called the birdbath resonator gyroscope (BRG). TheBRGs axisymmetric geometry leads to a good frequency andQ symmetry. The birdbath resonator can be fabricated witha good structural symmetry because its anchor is self-alignedto the rest of the structure. The BRG has n = 2 wine-glassmodes at 10.5 kHz and has a large frequency separation betweenthe n = 2 wine-glass modes and the closest parasitic mode(| fparasitic − fn=2|/ fn=2 = 0.3), which will potentially lead to alow vibration sensitivity. The equations of motion for 3-D shellgyroscopes are derived and the effective mass and angular gainof the BRG is estimated using finite element method (FEM). TheBRG is fabricated using a 3-D micrometer-blow-torching processand assembly on an electrode substrate made with the silicon-on-glass process. The BRG is operated in the force-rebalance mode at<1 mTorr vacuum at room temperature and has a scale factor of27.9 mV/(deg/s), a full-scale range >400 deg/s, an angle randomwalk of 0.106 deg/
√h, and a bias stability of 1 deg/h. A large
angular gain (0.317) is measured, which is close to the estimatedvalue of 0.25 obtained via FEM. [2013-0277]
Index Terms— Gyroscope, fused silica, blowtorch, angular gain,effective mass, quality factor.
I. INTRODUCTION
ADVANCES in microelectromechanical systems (MEMS)technologies in recent years have made it possible to
create micro-scale gyroscopes with higher precision and lowercost. Micro-gyroscopes are currently used in a wide range ofapplications including consumer, automotive, aerospace, andmilitary. Most micro-gyroscopes are of the vibratory type [1],because they occupy a small area and consume low power.Conventional MEMS materials such as silicon (Si) can achievea very high mechanical quality factor (Q > 1 million [2]),which produces a large Coriolis force. The fabrication of very-high-aspect-ratio Si microstructures has been realized due toadvances in deep-reactive-ion etching (DRIE).
Vibratory gyroscopes measure rotation rate (�) or angle (θ)by detecting changes in the vibration patterns caused by
Manuscript received September 4, 2013; accepted November 8, 2013. Dateof publication November 26, 2013; date of current version January 30, 2014.This work was supported in part by DARPA MRIG under Award W31P4Q-11-1-0002, in part by the Lurie Nanofabrication Facility, in part by the NationalNanotechnology Infrastructure Network, and in part by the National ScienceFoundation. Subject Editor C. Rembe.
The authors are with Wireless Integrated MicroSensing and Systems,University of Michigan, Ann Arbor, MI 48109 USA (e-mail: [email protected]; [email protected]; [email protected]; [email protected];[email protected]).
Color versions of one or more of the figures in this paper are availableonline at http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/JMEMS.2013.2291534
the Coriolis force. Depending on whether they measure� or θ , they are categorized as rate gyroscopes (RG) orrate-integrating gyroscopes (RIG), respectively.
The RG is operated by sustaining the vibration of a proofmass along the primary (drive) axis at its resonant frequency( f ) and measuring the amplitude of vibration along thesecondary (sense) axis, which is orthogonal to the drive axis.The amplitude of vibration along the sense axis is proportionalto �, and this type of RG is called the open-loop-mode RG.A RG can also be realized by measuring the amplitude ofa force that nulls the motion along the sense axis, which isproportional to �. This type of RG is called the closed-loop-mode RG. Closed-loop-mode RGs have a lower scale factorthan open-loop-mode RGs; however, they can achieve widerbandwidth (BW ) and larger full-scale range (FSR), which canbe controlled with the force-rebalance-loop parameters. Theykeep better bias stability over the change of Q and f than theopen-loop-mode RG, which makes them more suitable in alarger range of applications. Methods for RGs to achieve goodstability by continuously calibrating their scale factors [3]and differentially canceling bias drifts using a mode-reversaltechnique have been reported [4], [5].
The RIG is controlled by sustaining the amplitudes ofthe two resonant modes and measuring the angle of theprecession of the vibration wave around the rotation axiscaused by the Coriolis force. The change of the precessionangle (�θprec) is the change of the rotation angle (�θ) timesa scale factor called the angular gain (Ag). Ag is a stableconstant determined solely by the shape of the gyroscope.RIGs can directly measure θ , which makes them very useful inposition measurement in GPS-denied environments. The RIGcan also calculate � by taking the time derivative of θ . RIGscan also achieve large BW and FSR. The key challenge forRIGs, however, is that their bias drift is a direct function ofthe differences in the frequency (� f ) and inverse decay timeconstant (�1/ τ , where τ = Qπ−1 f 1) of their two resonantmodes [6]. Therefore RIGs require a very symmetric geometrywith a very long τ .
Methods for extending the RG BW and FSR by mea-suring modulated f [2], [7] and increasing the resonancemode f [8] have been reported. The bias of the frequency-modulation (FM) gyroscopes, however, also suffers due to � fand �1/ τ , which makes it similarly challenging to achievehigh performance as the RIG. A high- f gyroscope such as thebulk-acoustic-wave (BAW) gyroscope achieves a large BWeven in the open loop mode, because the BW of a resonant
1057-7157 © 2013 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission.See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.

CHO et al.: FUSED-SILICA MICRO BIRDBATH RESONATOR GYROSCOPE 67
mode has a linear relationship with f . Due to the smallvibration amplitude, a high- f gyro can achieve a large FSR.However, the drawback of this approach is the reduction ofthe scale factor with the increase of f .
For RG and RIG to achieve good performance, it is neces-sary for them to have good f and Q symmetry over a widetemperature range. This can be done with a symmetric devicedesign and a high Q. By designing a symmetric device, a pairof resonant modes having symmetric displacement patterns,also called the degenerate modes, can be obtained. Degeneratemodes have identical f and Q and same temperature coeffi-cients of f and Q. A high Q can be obtained with a symmet-ric design to minimize the anchor loss and optimization ofthe width and f of the device to minimize thermoelasticdamping (TED).
On the macro scale, navigation-grade performance has beenreported for the hemispherical resonator gyroscope (HRG).The hemispherical resonator is made of fused silica (FS) usinggrinding and polishing processes and has an extremely highQ (>10 million) [9]; however, it is difficult to apply thesefabrication methods for creating micro-scale shells. On themicro scale, a 2-kHz quad-mass tuning-fork gyroscope witha τ > 100 sec and excellent resolution is reported in [10].The drawbacks of this approach are the low operating f ,near the f of motors and engines. A multi-ring Si cylindricalgyro (CING) operating at f of 3kHz and τ ∼ 10 secondshas been reported [11]. The CING has a large frequencyseparation between the n = 2 wine-glass modes ( fn=2) andthe parasitic modes ( f parasit ic), including the tilting mode andvertical modes ( f parasit ic/ fn=2 ∼ 2). Its main drawback is thesmall angular gain (Ag = 0.013) due to its small aspect ratio[height (H ) / radius (R) = 0.05].
The resonance mode frequencies of the above two examplesare designed to be <3 kHz to minimize TED. TED is causedby the coupling between heat transfer physics and solidmechanics for a vibrating beam [12]. The temperature gradientis generated due to adiabatic change of strains in the beam:the temperature of a region under a negative strain increaseswhile the temperature of a region under a positive straindecreases. Due to the heat flow from the hot to cold regionsand the thermal stress generated due to the expansion of thematerial, a phase mismatch is generated between the stressand strain fields. The largest TED loss occurs when the phasemismatch is closest to 90°. For a Si gyroscope, lower TED lossis achieved by reducing beam width and decreasing f [13];however, the sensor becomes more sensitive to environmentalvibrations.
Fused silica (FS) is a promising material for micro-scalegyroscopes due to its excellent material properties. Due to itssmall linear expansion coefficient (αF S = 0.5 × 10−6 K−1
[14]) and thermal conductivity (kF S = 1.38 Wm−1K−1 [14]),the τ due to TED (τT E D) of FS increases with beam thickness,regardless of f . This allows us to create a high- f (>10 kHz)gyro to achieve low vibration and shock sensitivities. FS isan amorphous material so it does not lose energy at grainboundaries [15] and has higher fracture toughness thanSi (KI C (FS) = 0.88 MPa-m1/2 [16]). The fabrication ofmicro-FS shells has been made possible by the micro
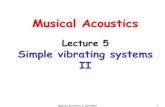
Fig. 1. Architecture of micro birdbath resonator gyroscope (BRG).
blowtorch molding process [17]. The process utilizes a fuel-oxygen blowtorch, which can provide an intense amount ofheat (up to 2500 °C) in a very short duration (<10 seconds) toreflow thin FS substrates (thickness <200 μm) into a varietyof 3-D geometries having large device height (∼2 mm).
In this paper, we introduce a novel micro-scale FS shellgyroscope, called the birdbath resonator gyroscope (BRG).While the BRG resembles the HRG, the birdbath (BB)resonator can be fabricated with better symmetry thanthe HRG on the micro scale. A three-dimensional (3-D)shell micro-gyroscope has been previously demonstrated, butis made from Pyrex and has a short τ [18]. The BBresonator is fabricated using the micro blow-torching processand assembled to a substrate wafer, which is fabricated usingthe Si-on-glass (SOG) process. We report the performanceof the gyro tested in the force-feedback mode with off-chipinterface circuitry.
The rest of this paper is organized as follows: In section II,we introduce the architecture of the BRG and its frequencycharacteristics. In section III we derive the motion equa-tion for a three-dimensional (3-D) shell gyroscope togetherwith the estimation of its effective mass (Me f f ) and angu-lar gain (Ag). In section IV, the fabrication process of theBRG is presented. In Section V, the measurement resultsare summarized. Section VI summarizes and concludes thispaper.
II. DEVICE DESIGN
A. Device Architecture
Fig. 1 shows the structure of the BRG. It consists of asuspended FS birdbath resonator and 16 discrete electrodessurrounding its outer perimeter. The electrodes are designedfor the control and measurement of the n = 2 wine-glassmode. The birdbath resonator is mounted face-up on an anchorpost. In this orientation, it is easier to trim the f and Q ofthe resonator by adding or removing mass on the rim of theresonator [9], [19]. The electrodes and anchor are formed ona glass substrate.

68 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 23, NO. 1, FEBRUARY 2014
The micro-BB resonator [20] offers attractive features overthe micro-hemispherical resonator [21]. First, the anchorand the rest of the shell are self-aligned, that is, they areformed using only a single patterning step, which leadsto better structural symmetry and lower anchor loss. Themicro-hemispherical resonator needs at least two patterningsteps to define the shell geometry and the anchor, and themisalignment between the shell and anchor leads to largeranchor loss. Second, the BB resonator can also be mounted tothe anchor either face up or down, which makes electrodeintegration and fabrication more compatible with differentprocesses.
B. Frequency Characteristics
The frequency characteristics of the micro-BB shell arecalculated based on its cross sectional shape via finite elementmethod (FEM) using ANSYS software. The resonator hasan outer radius (R) of 2.5 mm, an anchor radius (AR) of0.5 mm, a rim thickness (trim ) of ∼70 μm, and height (H ) of∼1.55 mm (H /R ∼ 0.62). In the FEM model, the thicknessof the shell (t) decreases linearly with vertical position, h,along the shell (where h = 0 at the rim and h = Hat the bottom of the resonator) with a ratio (�T /�h) of0.038 μm/μm, i.e.,
t (h) = trim − 0.038 × h (1)
for a 100-μm thick FS substrate. This approximates thedifferent amount of plastic deformation occurring in the FSsubstrate at different depths during molding [17]. We find thatfn=2 is determined mostly by R and trim . The parasitic modeslocated near the n = 2 wine-glass modes include the tiltingand the vertical modes. ft ilt ing / fn=2 and fvert ical / fn=2 aredetermined mostly by T at the bottom of the shell (tmin), andMe f f is determined mostly by R and trim .
The BRG is expected to become less sensitive to externalvibrations as fn=2 becomes higher, | fn=2− f parasit ic | becomeslarger, and ft ilt ing become higher [22]. fn=2 needs to behigher in order to avoid operating near the vibration f ofmotors and engines, which range up to ∼5 kHz [23]. A largerdifference between fn=2 and the f parasit ic is needed in orderto avoid the f of the Coriolis force generated under rotationin alternating directions (a.k.a. AC rotation, f = fn=2 + f�,fn=2 − f�, where f� is the f of the AC rotation), fromcoinciding with f parasit ic, where the displacement due to theexternal acceleration is amplified by the Q parasit ic times thenon-resonance response. A high ft ilt ing is needed to reduce theamplitudes of the tilting-mode vibrations induced by externalaccelerations that exist in the same plane as the n = 2wine-glass modes and are major sources of bias drift [22].
Using FEM, the BB resonator is calculated to have ahigh fn=2 (12.6 kHz), which is above the f of environmentalvibration f . It also has wide frequency separation betweenthe n = 2 wine-glass modes and the closest parasitic mode(| f parasit ic − fn=2|/ fn=2 = 0.3). The large separation betweenthese frequencies makes the BRG more immune to externalvibration over a wide BW. fn=2 and ft ilt ing can be increasedby using a FS substrate with a larger thickness.
III. EQUATIONS OF MOTION FOR THREE-DIMENSIONAL
SHELL GYROSCOPES
To create a high performance gyroscope it is importantto understand how its physical parameters are affected byits geometry. Physical parameters that strongly affect theperformance include Me f f and Ag . Me f f is the proof massof a gyro when it is modeled as a lumped-mass gyroscope,that is, when the entire proof mass is modeled to havethe same vibration amplitude. For a tuning-fork gyroscope,Me f f is simply the sum of its proof masses; however, for ashell gyroscope such as the BRG, the calculation for Me f f
is not straightforward, because different parts of the shellvibrate with different amplitudes in the wine-glass mode.Ag is defined as the scale factor of a whole-angle gyroscope.The Coriolis force is proportional to Ag , as will be shownin Section III-F, so it is important to know how to design agyroscope to obtain a large Ag .
The Me f f and Ag of a shell gyroscope can be calculatedusing the equation of motion that is derived based on resonantmode patterns. The equation of motion is a second-orderpartial differential equation that contains every kind of forcein the system, including inertial, elastic, and viscous dampingforces. The equation is formulated for each degree of freedom.For a gyroscope, two equations are necessary, because it is atwo-degree-of-freedom (2-DOF) mechanical system.
In this section we derive equations of motion for a 3-Dshell gyroscope operating in the wine-glass mode usingLagrange’s method [24]. Then we calculate the Me f f and Ag
of the BRG using FEM. The motion equation for a bulk-acoustic-wave (BAW) disk gyroscope was reported in [25].This method derived Me f f and Ag based on theoreticalequations for displacement patterns of a disk; however, itis difficult to use this method to calculate the Me f f andAg of complex shell gyroscopes like the BRG, as the equa-tions for displacement patterns of such geometries are notavailable. Putty reported a method for calculating the Me f f
and Ag of a vibratory ring gyroscope using FEM [26]. Thismethod is attractive, because the physical parameters of anyshell gyroscope can be calculated easily. Excellent agreementbetween the estimated and measured Ag of a ring gyroscopewas reported. The derivations for physical parameters in[26], however, can only be applicable to two-dimensional(2-D) shell gyros. In this study we derive the equations ofmotions for a 3-D shell gyroscope operating in the wine-glassmodes [27]. We consider the case a shell gyro is operating intwo wine-glass modes that are of same order. The expressionsfor physical parameters derived here will also be applicable to2-D shell gyros such as ring [26] or disk gyroscopes [25]. Themethod introduced here can be adopted to derive the equationsof motion for a shell gyroscope operating in the wine-glassmodes of different orders [28], [29] as well as a tuning forkgyroscope [30].
A. Lagrange’s Equation of Motion
Equations of motion can be formulated with respect to thewine-glass modes. We introduce two generalized coordinatesq1 and q2, which are the amplitudes of each mode. The motion

CHO et al.: FUSED-SILICA MICRO BIRDBATH RESONATOR GYROSCOPE 69
Fig. 2. Infinitesimal mass element p (shaded in orange) of BB shell ininertial reference frame.
equations for the two modes are derived from kinetic energy(TE ), potential energy (VE ), and energy dissipation due toviscous damping (DE ) forces for each mode (F) [24]:
d
dt
(∂(TE − VE )
∂q1
)− ∂(TE − VE )
∂q1
+ ∂ DE
∂q1
= F1 (2a)
d
dt
(∂(TE − VE )
∂q2
)− ∂(TE − VE )
∂q2
+ ∂ DE
∂q2
= F2 (2b)
B. Kinetic Energy (TE )
For a continuous geometry like a shell, TE is the sum ofthe kinetic energies of all elements comprising the object:
TE = 1
2
∫V
ρ∣∣∣−−→v(p)
∣∣∣2dV
= 1
2
∫V
ρ[vx (p)2 + vy(p)2 + vz(p)2]dV (3)
where ρ is the density of the shell, |−−→v(p)| is the velocityof infinitesimal mass element p, and (vx(p), vy(p), vz(p))are vector components of its velocity vector in the inertialreference frame (Fig. 2). We consider a BRG in a rotatingcoordinate frame (RT ). The origin of the sensor (OS) is locatedat a position vector −→ra from the origin of a rotating coordinate(ORT ). RT rotates at an angular velocity
−→� with respect to the
inertial reference frame (I ). RT is located at a position vector−→ro from the origin of inertial reference frame (O). p is origi-nally located at a vector −→rp from the origin of the sensor (OS),and when the shell is vibrating, p is moving with a displace-ment vector
−−→u(p) from its original position. Then the velocity
of p in inertial coordinates (−−→v(p)) is expressed by [31]:
�v = −→v0 + −−→u(p) + �� × ( �ra + �rp + −−→
u(p)) (4)
where −→vo is the velocity vector of R in inertial coordinatesand
−−→u(p) is the velocity vector of p in sensor coordinates.
Fig. 3. Lumped-mass representations of a gyroscope: (a) sensor axes andprincipal elastic axes that are separated by θω and (b) sensor axes and principaldamping axes that are separated by θτ .
In (4), −→vo and−→� can be expressed by (vxo, vyo, vzo) and
(�x , �y , �z), respectively, in XoYoZo coordinates. −→ra can be
expressed by (xa , ya ,za) in XRTYRTZRT coordinate, and−−→u(p),−→ra , and
−−→u(p) can be expressed by (ux , u y , uz), (x p, yp ,zp),
and (ux , uy , uz) in XSYSZS coordinates. −→v is expressed by:⎡⎣vx
vy
vz
⎤⎦=
⎡⎣vx0+ux + �y(za +z p + uz) − �z(ya +yp + uy)vy0+u y − �x(za +z p + uz) + �z(xa +x p + ux )vz0+uz + �x(ya+yp + uy) − �y(xa +x p + ux)
⎤⎦
(5)
TE of a rotating shell is found by inserting (5) into (3).
C. Potential Energy (VE )
Potential energy (VE ) is the energy stored due to elasticdeformation of the shell. When a gyro is operated to have smallvibration amplitude so that it does not suffer significantly fromnonlinear spring stiffening effects, the spring constant (k) ofthe 2-DOF system in any planar direction can be approximatedas a linear combination of two independent spring constants,called principal elastic constants (k1, k2). The directions wherek equals either k1 or k2 are called principal elastic axes. Forthe lumped mass model of a gyro in Fig. 3(a), the principalelastic axes and sensor axes (XsYsZs coordinates in Fig. 2)are separated by θω. If we call the displacement along theprincipal elastic axes xk and yk , VE is expressed in terms of(xk , yk) and (k1, k2) by:
VE =∫
k1xkdxk +∫
k2ykdyk (6)

70 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 23, NO. 1, FEBRUARY 2014
where xk and yk are related with the displacement along thesensor axes q1 and q2 by:[
xk
yk
] [cos θw − sin θw
sin θw cos θw
] [q1q2
](7)
D. Energy Dissipation Due to Viscous Damping (DE )
Gyroscopes lose energy due to friction of air molecules,TED, and anchor loss. When the vibration amplitude is smallthat nonlinear damping effects are not significant, the dampingcoefficient (c) for a 2DOF system can be approximated asa linear combination of two independent damping constants,called principal damping coefficients (c1, c2). The directionswhere c equals either c1 or c2 are called principal dampingaxes. For the lumped-mass model of a gyro in Fig. 3(b), theprincipal damping axes and sensor axes are separated by θτ .If we call the displacement along the principal damping axesxc and yc, the amount of energy loss due to viscous damping(DE ) is expressed in terms of (xc, yc) and (c1, c2) by:
DE =∫
c1 xcdxc +∫
c2 ycdyc (8)
where xc and yc are related with the displacement along thesensor axes (q1, q2) by:[
xc
yc
]=
[cos θτ − sin θτ
sin θτ cos θτ
] [q1q2
](9)
E. Shape Function ( �φ)
When the vibration amplitude is small and nonlinear effectsare not significant, the motion of a shell gyro can be approx-imated as a linear combination of the displacement vectorsof the two wine-glass modes [24]. Shape functions ( �φ), alsoknown as normal modal vectors, are the displacement vec-tors of infinitesimal mass elements of a shell normalized tothe maximum amplitudes for individual modes. In Cartesiancoordinates, the displacement vector of p (
−−→u(p)) is written by:⎡
⎣ ux(p)uy(p)uz(p)
⎤⎦ =
⎡⎣ φx1(p)
φy1(p)φz1(p)
⎤⎦ q1 +
⎡⎣ φx2(p)
φy2(p)φz2(p)
⎤⎦ q2 (10)
where (φx1, φy1, φz1) and (φx2, φy2, φz2) are �φ of the twowine-glass modes.
The displacement vectors of the wine-glass modes for a3-D shell in spherical coordinates are sinusoidal functions ofthe azimuth angle (ϕ) [Fig. 4(a)]. For example, a birdbathshell [Fig. 4(b)] vibrating in one of the n = 2 wine-glassmodes (mode 1) has antinodes at ϕ = 0, π /2, π , and 3π /2radians on the rim. The other n = 2 wine-glass mode (mode2) has antinodes at ϕ = π /4, 3π /4, 5π /4, and 7π /4 radianson the rim [Fig. 4(c)]. Displacement vectors of mode 1 and 2of the nth wine-glass modes for a 3-D shell, −→r , are expressedby [32]:⎡
⎣ rr
rϕ
rθ
⎤⎦ =
⎡⎣ f (r, θ) cos n(ϕ + ϕ0)
−g(r, θ) sin n(ϕ + ϕ0)h(r, θ) cos n(ϕ + ϕ0)
⎤⎦ (Mode1) (11)
⎡⎣ rr
rϕ
rθ
⎤⎦ =
⎡⎣ f (r, θ) sin n(ϕ + ϕ0)
g(r, θ) cos n(ϕ + ϕ0)h(r, θ) sin n(ϕ + ϕ0)
⎤⎦ (Mode2) (12)
Fig. 4. Infinitesimal mass element p of birdbath shell is located at (r, ϕ, θ )in spherical coordinate. The antinode are found at ϕ = 0, π/2, π , and 3π /2radians for mode 1 and ϕ = π/4, 3π/4, 5π/4, and 7π /4 radians for mode 2.(a) Birdbath shell in spherical coordinate (r, ϕ, θ ). (b) Displacement vector ofn = 2 wineglass mode 1. (c) Displacement vector of n = 2 wineglass mode 2.
where f (r, θ), g(r, θ), and h(r, θ) are functions that dependon the geometry of the shell.
Shape functions ( �φ) of the nth wine-glass modes in Carte-sian coordinates are found by converting (11) and (12) intoCartesian form and normalizing them to their maximum dis-placement amplitudes, which are found on the rim of the shellat the antinodes:
φx1(r, ϕ, θ) =[ f (r, θ) cos(ϕ) cos n(ϕ + ϕ0) sin θ
+g(r, θ) sin(ϕ) sin n(ϕ + ϕ0)
+h(r, θ) cos(ϕ) cos n(ϕ + ϕ0) cos θ ]/ max(√
u2x + u2
y + u2z
)(13a)
φy1(r, ϕ, θ) =[ f (r, θ) sin(ϕ) cos n(ϕ + ϕ0) sin θ
−g(r, θ) cos(ϕ) sin n(ϕ + ϕ0)
+h(r, θ) sin(ϕ) cos n(ϕ + ϕ0) cos θ ]/ max(√
u2x + u2
y + u2z
)(13b)
φz1(r, ϕ, θ) = [ f (r, θ) cos n(ϕ + ϕ0) cos θ
−h(r, θ) cos n(ϕ + ϕ0) sin θ ]/ max
(√u2
x + u2y + u2
z
)(13c)
�φ for mode 2 of the nth wine-glass modes can be found in asimilar way.
The equation of motion for a 3-D shell gyro is derivedby inserting �φ of the nth wine-glass mode into (3), (6), (8)and plugging these equations into (2). The equation can be

CHO et al.: FUSED-SILICA MICRO BIRDBATH RESONATOR GYROSCOPE 71
simplified by applying the principles of mode orthogonalityand symmetry of shape functions [27]:[
M1 00 M2
] [q1q2
]+
[0 −2γ�z
2γ�z 0
] [q1q2
]
+[
c11 c12c21 c22
] [q1q2
]+
[k11 k12k21 k22
] [q1q2
]
+[
0 −γ �z
γ �z 0
] [q1q2
]
−[
α1�2x + β1�
2y + μ1�
2z 0
0 α2�2x + β2�
2y + μ2�
2z
] [q1q2
]
=[
F1F2
](14)
where
Mi =∫v
ρ(φ2xi + φ2
yi + φ2zi )dV (15)
ρ =∫v
ρ∣∣φx1φy2 − φx2φy1
∣∣dV = 2∫v
ρ|φx1φy2|dV (16)
αi =∫v
ρ(φ2yi + φ2
zi )dV (17)
β1 =∫v
ρ(φ2x1 + φ2
z1)dV (18)
μi =∫v
ρ(φ2xi + φ2
yi )dV (19)
[k11 k12k21 k22
]
=[
cos2 θωk1 + sin2 θωk2 cos θω sin θω(−k1 + k2)
cos θω sin θω(−k1 + k2) sin2 θωk1 cos2 θωk2
]
(20)[c11 c12c21 c22
]
=[
cos2 θτ c1 + sin2 θτ c2 cos θτ sin θτ (−c1 + c2)
cos θτ sin θτ (−c1 + c2) sin2 θτ c1 cos2 θτ c2
]
(21)
Mi is the effective mass of mode i , γ is called the Coriolismass, and (α, β, μ) are centrifugal mass for rotation alongXs, Ys, and Zs axes [see Fig. 4(a)], respectively.
Note that (14) does not have a Coriolis force that isproportional to planar rotation rates (�x , �y). Therefore ashell resonator vibrating in two wine-glass modes of the sameorder cannot function as a gyroscope. This is not true when theresonator is operated in wine-glass modes of same order. Forexample, an x-and-y axis gyroscope operating in the n = 2and n = 3 wine-glass modes are reported in [28], [29].
F. Calculation of Physical Parameters of BirdbathResonator Gyroscope (BRG)
The physical parameters of the BRG are calculated usingANSYS software. The shell is modeled using a shell element(Shell93). Modal simulation is performed to obtain the �φ ofall elements for the n = 2 wine-glass modes. Me f f increases
with the size and thickness of the shell. For the fabricatedbirdbath shell geometry [radius (R) = 2.5 mm, height(H ) = 1.55 mm, rim thickness (trim ) = 70 μm, and theratio of thickness reduction to vertical position (�t/�h) =0.038 μm/μm], Me f f is calculated to be 680 μg. Effectivespring constant k (= k1 and k2) are calculated from f andMe f f to be 678 N/m.
Ag is the scale factor of θprec when a gyro is controlledin whole angle mode. External forces are applied to sustainthe vibration along both axes and cancel quadrature error [6].We assume that the gyro is perfectly symmetric and is rotatedaround the Zs axis [see Fig. 4(a)]. In this case q1 and q2 arecalculated to be:
q1 = a cos(θo − γ
M
∫�zdt) cos(ω′ + φo) (22a)
q2 = a sin(θo − γ
M
∫�zdt) cos(ω′ + φo) (22b)
ω′ =√
k/M − �2z (μ/M − γ 2/M2) (22c)
where a is the amplitude of the vibration pattern, θo is anoffset angle, �z is the rotation rate around the Zs axis, andφo is an offset phase. Equations (22a) and (22b) show that q1and q2 change by �z(γ /M)t radians when the gyro is rotatedby �zt radians (= θ). The precession angle (θprec) measuredin sensor coordinates [XsYsZs axes in Fig. 4(a)] is calculatedby taking the inverse tangent of q1/q2 and multiplying it by−1/n to account for angle separation between nth wine-glassmodes in sensor coordinates. Ag is calculated to be:
Ag = �θprec
�θ
= γ
nM(23)
From (15) and (16), Ag can be increased by increasing theratio between planar motion amplitudes to vertical motion
amplitudes (=√
φ2x + φ2
y/|φz|). This can be done by increas-ing the aspect ratio (H /R) of the shell. Fig. 5 shows the plot ofAg for the BRG obtained via FEM using ANSYS against H /Rfrom 0.1 to 0.98. In this simulation, R is set to be 2.5 mm, His set to vary from 250 to 2750 μm, and t is set to be 77 μmuniformly across the shell. Ag is calculated to increase from0.01 to 0.33 as the aspect ratio increases.
The Ag of a low-aspect-ratio shell is small, because the shellflexes significantly in the vertical direction (Zs-axis) and lessin the lateral direction (Xs-Ys axis) like a potato chip (see thedeformed shape at the lower left side of Fig. 5). When the shellis rotated around the Zs-axis, since the motion of the shell ismostly parallel to the axis of rotation, a small Coriolis forceis generated. The Ag of a high-aspect-ratio shell increases,because the shell flexes largely in lateral directions and lessin vertical directions (see the deformed shape at upper rightside of Fig. 5). When the shell is rotated around the Zs-axis,since the motion of the shell is mostly perpendicular to theaxis of rotation, a large Coriolis force is generated. We foundlittle dependency of Ag to t from our simulation. For a t of20 to 200 μm, a variation of Ag < 13 % is found for shellswith an aspect ratio > 0.3. For the fabricated BRG geometry,Ag is calculated to be 0.25.

72 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 23, NO. 1, FEBRUARY 2014
Fig. 5. Increase of angular gain (Ag) against the increase of aspect ratio(= H/R) for micro birdbath (BB) shell. The simulated geometry has radius(R) of 2.5 mm, height (H ) of 250-2750 μm, and thickness (t) of 77 μmuniformly across the entire geometry. We found weak dependency of Ag toT (Ag variation < 13% for T : 20-200 μm for aspect ratio > 0.3).
TABLE I
FREQUENCY CHARACTERISTICS, ANGULAR GAIN (Ag), AND EFFECTIVE
MASS (Meff ) OF BRG CALCULATED WITH FEM
The centrifugal masses of a shell gyro (α, β, μ) stronglydepend on the aspect ratio: α and β become large when theaspect ratio is low whereas μ becomes large when the aspectratio is high. For the fabricated BRG geometry, α, β, and μ arecalculated via FEM to be 455, 455, and 408 μg, respectively.Centrifugal force is much weaker than the Coriolis force ata moderate rotation rate. For instance, the centrifugal forceof a BRG with an f of 12.6 kHz is only 700 ppm of theCoriolis force even at a high �z(= 5000 deg/s). Table Isummarizes the dimension, frequency characteristics, andphysical parameters of the birdbath shell used in the currentstudy.
Fig. 6. Fabrication process steps for the micro birdbath resonator.(a) Define 1.6 mm-deep DRIE trenches. (b) Evaporate and pattern 4 μm thickAl protection layer. Anodically bond to borosilicate wafer with 3 μm recesspatterns. (c) Etch the remaining thickness of Si . (d) Dissolve protection layer.(e) Metallize birdbath resonator. Assemble resonator to the electrode substrate.
IV. FABRICATION PROCESS
A BB resonator is fabricated from a 100-μm FS substrateusing a micro blow-torch-molding process and is metallizedwith sputtered Cr/Au (100/1000 Å) as described in [17].Fig. 6 describes the fabrication process of the electrodesubstrate and resonator assembly. 1.6-mm deep trenches areetched by deep reactive ion etching (DRIE) on a 2-mmlow-resistivity (P-type) Si wafer [Fig. 6(a)]. A 4 μm-thickaluminum (Al) protection layer is evaporated to cover the topsurface, sidewall, and bottom surface of the trenches. The Allayer is patterned using wet etching. The Si wafer is anodicallybonded face-down to a 500μm Pyrex wafer with 3-μm deeprecesses in locations where the Si will be released in a laterstep. The wafers are bonded at 400 °C and a voltage of1500 V [Fig. 6(b)]. Si is removed with DRIE from the topside,leaving Si electrodes and an anchor post [Fig. 6(c)]. The Alprotection layer is etched away in dilute hydrochloric acid(HCl : H2O = 1 : 3), releasing the Si pieces locatedbetween the anchor post and the electrodes [Fig. 6(d)]. Theresonator is attached to the anchor post using polymer adhesive(Crystalbond 509, SPI Supplies, West Chester, PA, USA).The anchor tightly fits the resonator, which helps to self-align the resonator to the electrodes [Fig. 6(e)]. Fig. 7 showsa completed BRG. The sensor measures 8 mm (width) ×8 mm (length) × 2.5 mm (height). Fig. 8 shows a close-upSEM of the 13.9 μm gap between the resonator shell andelectrodes. The electrode gap sizes (g) across the 16 electrodesare measured to be 10.3 − 16.3 μm. The average electrode gapsize (gavg) is 14.2 μm. The capacitance between the resonatorand each electrode is measured with an HP 4284A PrecisionLCR Meter and is 153 − 182 fF. The capacitance variationmay not cause any error in the force-rebalance mode, because

CHO et al.: FUSED-SILICA MICRO BIRDBATH RESONATOR GYROSCOPE 73
Fig. 7. Birdbath Resonator Gyro (BRG) [Resonator size: radius(R) = 2.5 mm, anchor radius (AR) = 0.5 mm, height (H) = 1.55 mm. Devicesize: 8 mm (width) × 8 mm (length) × 2.5 mm (height)].
Fig. 8. Close-up scanning electron microscope (SEM) image of the gapbetween the shell and electrode (gap size = 13.9 μm).
the direction of the oscillation is nearly constant regardlessof rotation rate; however, the capacitance variation is believedto cause bias instability in whole-angle mode due to error inthe electrostatic control force that disrupts the direction of theoscillation pattern. The measured capacitance values are largerthan the simulated value of 132 fF obtained using Comsol 4.3with gavg and no fringing electric field. The difference betweenthe measured and simulated capacitances may be due to thedifference between the actual and modeled shell curvatures.
V. DEVICE EVALUATION
A. Mode Characterization
The BRG is tested at <1 mTorr at room temperature.The n = 2 wine-glass modes are at 10,465 and 10,479 Hz(� fn=2 = 14 Hz, � fn=2/ fn=2 = 0.13%). Fig. 9 showsthe mode spectra of the n = 2 wine-glass modes that areelectrically tuned to have a 0.26 Hz frequency split. The modefrequencies are electronically matched to less than 0.2 Hz, andfurther tuning is done using a quadrature cancellation loop.Fig. 10 shows the decay time constant plots of the n = 2wine-glass modes when their frequencies are separated by0.22 Hz ( fn=2 = 10,457.23 Hz and 10,457.45 Hz). The τn=2
Fig. 9. Mode spectra of n = 2 wineglass modes after their frequencies areelectrically tuned to have a frequency difference (� fn=2) of 0.26 Hz.
Fig. 10. Decay time constant plots of one of the n = 2 wineglassmode when their frequencies are closely tuned (� fn=2 = 0.22 Hz).(a) fn=2 = 10.45723 kHz, τn=2 = 7.45 seconds (Qn=2 = 244, 750).(b) fn=2 = 10.45745 kHz, τn=2 = 7.69 seconds (Qn=2 = 252, 640).
are calculated by actuating the sensor at those frequencies,stopping the actuation, recording the decaying amplitudes,and fitting the recorded amplitudes with inverse exponentialfunctions, i.e., Ao exp(−t/τ). The τn=2 are measured to be7.45 seconds (Qn=2 = 244.75k) and 7.69 seconds (Qn=2 =252.64k). The anisotropy of the inverse of τn=2 (�1/ τn=2) is4.1 mHz.
B. Force-Rebalance-Mode Control
The BRG is operated in the force-rebalance mode (Fig. 11).Three control loops are implemented: an amplitude control

74 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 23, NO. 1, FEBRUARY 2014
Fig. 11. Interface/control algorithm diagram for the force-rebalance modeoperation of the BRG.
Fig. 12. Sensor response to DC yaw rotation rate (�z ) of −125 to 125 deg/s.The scale factor is 27.8 mV/(deg/s). A full-scale range >400 deg/s ismeasured.
loop to keep the oscillation amplitude of the gyro constantalong the drive axis, a quadrature cancellation loop to zerothe amplitude of the motion along the sense axis that is in aquadrature phase with the motion along the drive axis, and aCoriolis feedback loop to zero the amplitude of the motionalong the sense axis that is in phase with the motion alongthe drive axis. Phase lock loops (PLL) are used to createthe in-phase and quadrature signals of the motion along thedrive axis. The control algorithm is implemented using ZurichInstrument’s HF2LI lock-in amplifier. DC voltages are usedto bias the resonator body and electronically tune in-axisand cross-axis stiffness. The sensor is evaluated on an IdealAerospace Aero900 rotation table.
Fig. 12 shows the sensor response to DC rotation rate(�) from −125 to 125 deg/s. The scale factor (SF) is27.8 mV/(deg/s). The FSR of the sensor is found to be over400 deg/s. Fig. 13 shows the Allan deviation plot, demon-strating an angle random walk (ARW) of 0.106 deg/
√hr and
a bias stability of 1 deg/hr. The low ARW and bias stabilityare attributed to the large Q of the BB resonator. In thefuture, the accuracy and stability can be further improved byreducing capacitive feedthrough, differential-mode sensing and
Fig. 13. Allan deviation plot of the BRG in force-rebalance mode: Anglerandom walk (ARW): 0.106 deg/
√hr. Bias stability: 1 deg/h.
Fig. 14. Sensor response (V ) to yaw rotation rate (�z) from −125 to125 deg/s. From the slope of this graph, Ag is calculated to be ∼0.317.
actuation, more precisely controlling the operating tempera-ture, reducing the electrical noise in the bias sources, andautomatic mode matching [33], [34].
C. Angular Gain (Ag) Measurement
In the force-rebalance mode, the ratio of the feedback (�)and drive (E) amplitudes are related to the rotation rate (�z),Ag , and τ by [26]:
�
E= 2Agτ�z (24)
Fig. 14 shows the plot of �/E against �z from −125 to125 deg/s (= −2.18 to 2.18 rad/s). From the slope of this plotand an average τ of 7.57 seconds, Ag is found to be ∼ 0.317.The difference between the calculated Ag and the estimatedAg of 0.25 using FEM in Section III-F is attributed to thedifference in Cdrive and C f eedback and differences betweenactual and simulated birdbath shell geometries, includingthe curvature of the shell and its height. Nevertheless, weconfirmed a large Ag from the fabricated BRG and validatedour gyroscope design.

CHO et al.: FUSED-SILICA MICRO BIRDBATH RESONATOR GYROSCOPE 75
Fig. 15. Detection circuit for the BRG: (a) Transimpedance amplifier.(b) Noise model.
D. Comparison of Measured and Calculated AngleRandom Walk
The ARW is contributed by the thermal noise of the deviceand the readout circuitry. The ARW of the device (ARWdevice)operating in the force-rebalance mode including the Ag factoris expressed by [35]:
ARWdev ice ≈ 1
2Agqdrive
√kB T
Me f f ωQ× 3437.7°/
√h (25)
where kB is the Boltzmann constant, T is the temperature, andqdrive is the drive amplitude. qdrive is estimated by comparingthe shell-to-electrode capacitance change (�Cs) calculatedfrom the voltage output of the transimpedance amplifier (TIA)connected to the drive-amplitude-measurement electrode(vout ) with the simulated capacitance change due to knownflexural deflection amplitudes obtained using Comsol 4.3.The TIA is shown in Fig. 15(a). �Cs is calculated fromvout = 850mV , Vbody = 90V , ω = 2π× 10,450 rad/s, thefeedback impedance (R f = 2M� connected in parallel withC f = 0.5 pF), and the gain of the rest of the amplifyingstages (A = 10) to be 7.15 fF. The Comsol assumed a nominalCs of 132 fF. A qdrive of ∼2 μm produced a capacitancechange that is closest to the calculated �Cs . Using thisqdrive, Ag = 0.317, Me f f = 680μg, T = 300K ,ω = 2 π × 10, 450 rad/s, and Q = 248,695, ARWdrive
is calculated to be 2 × 10−3°/√
h. The noise model ofthe TIA is shown in Fig. 15(b). This model considers theinput noise voltage of the operational amplifier (OPA656,√
v2n = 7 nV/
√Hz) as well as the parasitic capacitance
between the non-inverting input port of the operationalamplifier and the electrical ground. The parasitic capacitancecomprises the capacitance between the electrode and thesubstrate (Cpad) and the input capacitance of the operationalamplifier (Cin). The ARW due to the circuitry noise(ARWcircuit ) is calculated by dividing the output-referrednoise of the circuitry by SF to be:
ARWcircuit
= N√
v2n
SF
√ω2 R2
f (Cs + Cin + C f )2 + 1√ω2 R2
f C2f + 1
× 60°/√
h (26)
Using√
v2n = 7 nV/
√Hz, Cpad +Cin = 10 pF, Cs = 167.5 fF,
and SF = 27.8 mV/(°/sec), ARWcircuit is calculated to be 2.5× 10−4°/
√h. The total ARW is calculated by taking the square
TABLE II
DESIGN AND TESTING SUMMARY
root of the ARW2device+ ARW2
circuit to be 2 × 10−3°/√
h.This value is 50 times smaller than the measured ARW. Thismay be because of the difference between the actual andestimated qdrive. A better estimation of qdrive is expected tobe made if the electrode gaps are made more uniform.
VI. SUMMARY
This paper reports the design, fabrication, and testing of anovel micro 3-D fused silica gyroscope, named the birdbathresonator gyroscope (BRG). The BRG operates at 10.45 kHzwith high Q (= 249k) and has small stiffness and dampinganisotropy (� fn=2 = 14 Hz, �1/ τn=2 = 4.1 m H z). Weanalyzed the equations of motion for 3-D shell gyroscopeoperating in the wine-glass modes and estimated the Me f f
and Ag of the BRG. The Ag of the BRG is estimated by FEMto be 0.25. The prototype BRG is made by fabricating a BBresonator using a micro-blow torching process and assemblingit on an electrode substrate made with the Si-on-glass (SOG)process.
The sensor is operated in the force-rebalance mode, and anangle random walk of 0.106 deg/
√hr and a bias stability of
1 deg/hr are measured. A large Ag 0.317 is measured in theforce-rebalance mode, which is close to the FEM-estimatedvalue of 0.25. Efforts are underway to develop the next-generation BRG with smaller stiffness and damping anisotropyand a small and uniform electrode gap. Table II summarizesthe design and testing results of the BRG.
ACKNOWLEDGMENT
The authors would like to thank Dr. Radheshyam Tewariand Professor Craig Friedrich at Michigan TechnologicalUniversity for the machining of graphite molds, Mr. RobertGordenker for his help in testing the BRG and reviewingthis paper, and Mr. Tal Nagourney for his help in reviewingthis paper. The authors thank Dr. Jeffrey A. Gregory for thediscussions about angular gain.

76 JOURNAL OF MICROELECTROMECHANICAL SYSTEMS, VOL. 23, NO. 1, FEBRUARY 2014
REFERENCES
[1] J. Cho, J.-K. Woo, J. Yan, R. L. Peterson, and K. Najafi, “A high-Qbirdbath resonator gyroscope (BRG),” in Proc. 17th IEEE Int. Conf.Solid-State Sensors, Actuat. Microsyst., Jun. 2013, pp. 1847–1850.
[2] S. A. Zotov, A. A. Trusov, and A. M. Shkel, “High-range angular ratesensor based on mechanical frequency modulation,” J. Microelectro-mech. Syst., vol. 21, no. 2, pp. 398–405, Apr. 2012.
[3] A. A. Trusov, I. P. Prikhodko, D. M. Rozelle, A. D. Meyer, and M. Shkel,“1 PPM precision self-calibration of scale factor in MEMS coriolisvibratory gyroscopes,” in Proc. 17th IEEE Int. Conf. Solid-State Sensors,Actuat. Microsyst., Jun. 2013, pp. 2531–2534.
[4] S. F. Wyse and D. D. Lynch, “Vibrating mass gyroscope and method forminimizing bias errors therein,” U.S. Patent 7 188 523, Mar. 13, 2007.
[5] M. H. Kline, Y.-C. Yeh, B. Eminoglu, I. I. Izumin, M. Daneman,D. A. Horsley, et al., “MEMS gyrsocope bias drift cancellation usingcontinuous-time mode reversal,” in Proc. 17th IEEE Int. Conf. Solid-State Sensors, Actuat. Microsyst., Jun. 2013, pp. 1855–1858.
[6] D. D. Lynch, “Vibratory gyro analysis by the method of averaging,”in Proc. 2nd Saint Petersburg Int. Conf. Gyroscopic Technol. Navigat.,May 1995, pp. 26–34.
[7] M. H. Kline, Y.-C. Yeh, B. Eminoglu, H. Najar, M. Daneman,D. A. Horsley, et al., “Quadrature FM gyroscope,” in Proc. 26th Int.Conf. MEMS, Jan. 2013, pp. 604–608.
[8] H. Johari and F. Ayazi, “Capacitive bulk acoustic wave silicon diskgyroscopes,” in Proc. IEDM, Dec. 2006, pp. 513–516.
[9] E. J. Loper, D. D. Lynch, and L. M. Stevenson, “Projected performanceof smaller hemispherical gyros,” in Proc. PLANS, Nov. 1986, pp. 61–64.
[10] I. P. Prikhodko, S. A. Zotov, A. A. Trusov, and A. M. Shkel, “Foucaultpendulum on a chip: Angle measuring silicon MEMS gyroscope,” inProc. 24th Int. Conf. MEMS, Jan. 2011, pp. 161–164.
[11] J. Cho, J. Gregory, and K. Najafi, “High-Q, 3kHz single-crystal-siliconcylindrical rate-integrating Gyro (CING),” in Proc. 25th IEEE Int. Conf.MEMS, Jan. 2012, pp. 172–175.
[12] C. Zener, “Internal friction in solids. I. theory of internal friction inreeds,” Phys. Rev., vol. 52, no. 3, pp. 230–235, 1937.
[13] R. Lifshitz and M. L. Roukes, “Thermoelastic damping in micro andnanmomechanical systems,” Phys. Rev. B, vol. 61, no. 8, pp. 5600–5609,2000.
[14] (2003). HPFS Fused Silica Standard Grade Datasheet [Online].Available: http://www.corning.com/docs/specialtymaterials/pisheets/H0607_hpfs_Standard_ProductSheet.pdf
[15] V. B. Braginsky, Systems with Small Dissipation. Chicago, IL, USA:Univ. of Chicago Press, 1985.
[16] C. B. Carter and M. G. Norton, Ceramic Materials: Science andEngineering. New York, NY, USA: Springer-Verlag, 2007.
[17] J. Cho, J. Yan, J. A. Gregory, H. Eberhart, R. L. Petrerson, and K. Najafi,“High-Q fused silica birdbath and hemispherical 3D resonators madeby blow torch molding,” in Proc. 26th Int. Conf. MEMS, Jan. 2013,pp. 177–180.
[18] S. Zotov, A. A. Trusov, and A. M. Shkel, “Three-dimensional sphericalshell resonator gyroscope fabricated using wafer-scale glass blowing,”J. Microelectromech. Syst., vol. 21, no. 3, pp. 509–510, Jun. 2012.
[19] D. Schwartz, D. Kim, and R. T. M’Closkey, “Frequency tuning of adisk resonator Gyro via mass matrix perturbation,” J. Dyn. Syst., Meas.,Control, vol. 131, no. 6, pp. 1–12, 2009.
[20] K. Najafi and J. Cho, “Gyroscope and method of fabricating a resonatorfor a gyroscope,” U.S. Patent 13 481 650, May 25, 2012.
[21] L. D. Sorenson, X. Gao, and F. Ayazi, “3D micromachined hemisphericalshell resonators with integrated capacitive transducers,” in Proc. 25th Int.Conf. MEMS, Jan. 2012, pp. 168–171.
[22] D. D. Lynch, “Vibration-induced drift in the hemispherical resonatorGyro,” in Proc. 43rd Annu. Meeting Inst. Navigat., Jun. 1987,pp. 34–37.
[23] M. P. Norton, Fundamentals of Noise and Vibration Analysis forEngineers. Cambridge, U.K.: Cambridge Univ. Press, 1989.
[24] L. Meirovitch, Elements of Vibration Analysis. New York, NY, USA:McGraw-Hill, 1986.
[25] H. Johari, “Micromachined capacitive silicon bulk acoustic wave gyro-scopes,” Ph.D. dissertation, Dept. Mech. Eng., Georgia Inst. Technol.,Atlanta, GA, USA, 2008.
[26] M. W. Putty, “A micromachined vibrating ring gyroscope,” Ph.D. dis-sertation, Dept. Elect. Eng. Comput. Sci., Univ. Michigan, Ann Arbor,MI, USA, 1995.
[27] J. Cho, “High performance micromachined vibratory rate-and rate-integrating gyroscopes,” Ph.D. dissertation, Dept. Elect. Eng. Comput.Sci., Univ. Michigan, Ann Arbor, MI, USA, 2012.
[28] B. J. Gallacher, J. S. Burdess, A. J. Harris, and M. E. McNie, “Principlesof a three axis vibrating gyroscope,” IEEE Trans. Aerosp. Electron. Syst.,vol. 37, no. 4, pp. 1333–1343, Oct. 2001.
[29] W. K. Sung, M. Dalal, and F. Ayazi, “A mode-matched 0.9 MHz singleproof-mass dual-axis gyroscope,” in Proc. 16th Int. Conf. Solid-StateSensors, Actuat. Microsyst., Jun. 2011, pp. 2821–2824.
[30] M. F. Zaman, A. Sharma, and F. Ayazi, “High performance matched-mode tuning fork gyroscope,” in Proc. 19th IEEE Int. Conf. MEMS,Jan. 2006, pp. 66–69.
[31] A. Bedford and W. T. Fowler, Engineering Mechanics-Dynamics Prin-ciples. Upper Saddle River, NJ, USA: Prentice-Hall, 2002.
[32] R. D. Blevins, Formulas for Natural Frequencies and Mode Shapes.Malabar, FL, USA: Krieger, 1984.
[33] S. Sonmezoglu, S. E. Alper, and T. Akin, “An automatically mode-matched MEMS gyroscope with 50 Hz bandwidth,” in Proc. 25th IEEEInt. Conf. MEMS, Jan. 2012, pp. 523–526.
[34] A. Sharma, M. F. Zaman, and F. Ayazi, “A sub-0.2 /hr bias drift micro-mechanical silicon gyroscope with automatic CMOS mode-matching,”IEEE J. Solid-State Circuits, vol. 44, no. 5, pp. 1593–1608, May 2009.
[35] R. P. Leland, “Mechanical-thermal noise in MEMS gyroscopes,” IEEESensors J., vol. 5, no. 3, pp. 493–500, Jun. 2005.
Jae Yoong Cho (M’12) received his B.S. degreein Electrical Engineering and Material Science andEngineering and the M.S. and Ph.D. degrees in Elec-trical Engineering from the University of Michigan,Ann Arbor, in 2004, 2007, and 2012, respectively.He is currently a Postdoctoral Research Fellow in theDepartment of Electrical Engineering and ComputerScience and the Center for Wireless MicroSensingand Systems (WIMS2), University of Michigan, AnnArbor.
His research interests include the design, fabrica-tion, and control of micro vibratory rate- and rate-integrating gyroscopes,interface electronics for MEMS sensors, novel micromachining technologies,and micropackaging technologies.
Jong-Kwan Woo (M’11) received the B.S. andPh.D. degrees in Electrical Engineering and Com-puter Science from Seoul National University, Seoul,Korea, in 2000 and 2011, respectively. Since 2011,he has been a Post-Doctoral Research Fellowwith the Department of Electrical Engineering andComputer Science and the Center for WirelessMicroSensing and Systems, University of Michigan,Ann Arbor, MI, USA.
His research interests include low-power analogand digital mixed-signal circuits and device and
circuit co-design, especially interface and control systems for MEMS sensors.He received the Best Paper Award at the International Symposium onLow-Power Electronics (ISLPED) in 2011.
Jialiang Yan received the B.S. degree in electronicinformation science and technology from Sun Yat-sen University, Guangzhou, China, in 2009, and theM. Eng. degree in integrated microsystems from theUniversity of Michigan, Ann Arbor, USA, in 2011.He is currently working toward the Ph.D. degreein electrical engineering. His research includes thedesign, simulation, and fabrication of micro vibra-tory rate-integrating gyroscopes.

CHO et al.: FUSED-SILICA MICRO BIRDBATH RESONATOR GYROSCOPE 77
Rebecca L. Peterson (S’98–M’06) received the B.S.degree from the University of Rochester in 1996, theM.S. degree from the University of Minnesota-TwinCities in 2000, and the Ph.D. degree from PrincetonUniversity in 2006, all in electrical engineering.
Since 2009 she has been an Assistant ResearchScientist in Electrical and Computer Engineering atthe University of Michigan, Ann Arbor, MI. From2006 to 2009 she was a post-doctoral researcher atthe Cavendish Laboratory, Department of Physicsand an Associate Lecturer at Newnham College,
both at the University of Cambridge, U.K. Previously, she worked for GuidantCorporation (now Boston Scientific) in IC design.
Her research interests include solution-processed electronic materials anddevices including thin film transistors and circuits, self-assembled nanofabri-cation, and flexible electronics and sensors. Dr. Peterson was the recipient of aNational Science Foundation Graduate Fellowship in 1996, an Automatic RFTechniques Group (ARFTG) Student Fellowship in 1999, and an AmericanAssociation of University Women (AAUW) Selected Professions Fellowshipin 2004-2005.
Khalil Najafi (F’00) has been the SchlumbergerProfessor of Engineering and Chair of Electricaland Computer Engineering at the University ofMichigan since September 2008. He served as theDirector of the Solid-State Electronics Laboratoryfrom 1998-2005, the deputy director of the NSFERC on Wireless Integrated Microsystems (WIMS)from 2000-2009, and has been the director ofNSF’s National Nanotechnology Infrastructure Net-work (NNIN) since 2004. He received the B.S.,M.S., and the Ph.D. degree in 1980, 1981, and 1986,
respectively, all in Electrical Engineering from the University of Michigan,Ann Arbor. His research interests include: micromachining technologies,micromachined sensors, actuators, and MEMS; analog integrated circuits;implantable biomedical microsystems; micropackaging; and low-power wire-less sensing/actuating systems.
Dr. Najafi has been active in the field of solid-state sensors and actuatorsfor thirty years. He has been involved in several conferences and workshopsdealing with micro sensors, actuators, and microsystems, including the Inter-national Conference on Solid-State Sensors and Actuators, the Hilton-HeadSolid-State Sensors and Actuators Workshop, and the IEEE/ASME MicroElectromechanical Systems (MEMS) Conference. He has served as associateeditor or editor of several journals. He is a Fellow of the IEEE and the AIBME.