FEM in 1D - igpm.rwth-aachen.de · In der klassischen FEM wird die L¨osung u ∈ H1 0 (Ω) von...
99
Kapitel 1 FEM in 1D Um die die FEM (Finite Element Method) einzuf¨ uhren, betrachten wir das Modellproblem −u = f auf Ω := (0, 1) (1.1a) u(0) = u(1) = 0 (1.1b) 1.1 Variationsformulierung Eine klassische L¨ osung von (1.1) w¨ urde fordern: u ∈ C 2 (0, 1) ∩ C([0, 1]). Jedoch ist es zweckm¨ aßig, den L¨ osungsbegriff f¨ ur (1.1) zu erweitern. Einige Gr¨ unde hierf¨ ur sind: • praktisch relevant sind z.B. st¨ uckweise stetige rechte Seiten f ; dann kann u nicht in C 2 sein • (1.1) ist die Euler-Lagrange Gleichung einer Minimierungsaufgabe, bei der nur u ∈ L 2 (Ω) gefordert werden muß, um sinnvoll gestellt zu sein. F¨ ur viele physikalischen Probleme, die auf elliptische Pro- blem f¨ uhren, ist die Minimierungsaufgabe die “nat¨ urliche” und die Euler-Langrange Gleichungen werden nur aus diesen (unter Regularit¨ atsannahmen) hergeleitet. Variationsformulierung: Sei v ∈ C ∞ 0 (Ω). Dann folgt f¨ ur eine klassische L¨ osung u von (1.1): Ω −u v = Ω fv und durch partielle Integration Ω u v = Ω fv. Da v ∈ C ∞ 0 (Ω) beliebig gew¨ ahlt war, erhalten wir, daß u folgende Bedingung erf¨ ullt: Ω u v =: B(u, v)= l(v) := Ω fv ∀v ∈ C ∞ 0 (Ω). (1.2) Wir beobachten, daß B eine Bilinearform ist und l eine Linearform (siehe Def. 2.4, 2.3). Weiter bemerken wir: 1. W¨ ahrend die klassische Formulierung u ∈ C 2 (Ω) fordert, ist (1.2) bereits sinnvoll definiert, wenn z.B. u ∈ L 2 (Ω). Dies motiviert, den Raum H 1 (Ω) := {u ∈ L 2 (Ω) | u ∈ L 2 (Ω)} (1.3) zu definieren (genauere des Ableitungsbegriffs und von H 1 folgt unten). Wir nennen dann ein u ∈ H 1 (Ω), welches (1.2) erf¨ ullt, eine schwacheL¨osung. 2. Damit die Linearform l(·) sinnvoll definiert ist, reicht bereits f ∈ L 2 (Ω) 1
Transcript of FEM in 1D - igpm.rwth-aachen.de · In der klassischen FEM wird die L¨osung u ∈ H1 0 (Ω) von...

Kapitel 1
FEM in 1D
Um die die FEM (Finite Element Method) einzufuhren, betrachten wir das Modellproblem
−u′′ = f auf Ω := (0, 1) (1.1a)u(0) = u(1) = 0 (1.1b)
1.1 Variationsformulierung
Eine klassische Losung von (1.1) wurde fordern: u ∈ C2(0, 1) ∩ C([0, 1]). Jedoch ist es zweckmaßig, denLosungsbegriff fur (1.1) zu erweitern. Einige Grunde hierfur sind:
• praktisch relevant sind z.B. stuckweise stetige rechte Seiten f ; dann kann u nicht in C2 sein
• (1.1) ist die Euler-Lagrange Gleichung einer Minimierungsaufgabe, bei der nur u′ ∈ L2(Ω) gefordertwerden muß, um sinnvoll gestellt zu sein. Fur viele physikalischen Probleme, die auf elliptische Pro-blem fuhren, ist die Minimierungsaufgabe die “naturliche” und die Euler-Langrange Gleichungenwerden nur aus diesen (unter Regularitatsannahmen) hergeleitet.
Variationsformulierung: Sei v ∈ C∞0 (Ω). Dann folgt fur eine klassische Losung u von (1.1):
∫Ω
−u′′v =∫
Ω
fv
und durch partielle Integration ∫Ω
u′v′ =∫
Ω
fv.
Da v ∈ C∞0 (Ω) beliebig gewahlt war, erhalten wir, daß u folgende Bedingung erfullt:
∫Ω
u′v′ =: B(u, v) = l(v) :=∫
Ω
fv ∀v ∈ C∞0 (Ω). (1.2)
Wir beobachten, daß B eine Bilinearform ist und l eine Linearform (siehe Def. 2.4, 2.3). Weiter bemerkenwir:
1. Wahrend die klassische Formulierung u ∈ C2(Ω) fordert, ist (1.2) bereits sinnvoll definiert, wennz.B. u′ ∈ L2(Ω). Dies motiviert, den Raum
H1(Ω) := {u ∈ L2(Ω) |u′ ∈ L2(Ω)} (1.3)
zu definieren (genauere des Ableitungsbegriffs und von H1 folgt unten). Wir nennen dann einu ∈ H1(Ω), welches (1.2) erfullt, eine schwache Losung.
2. Damit die Linearform l(·) sinnvoll definiert ist, reicht bereits f ∈ L2(Ω)
1

3. (1.2) wurde nur aus (1.1a) hergeleitet. Um die Randbedingung (1.1b) zu berucksichtigen, wird derRaum
H10 (Ω) := {u ∈ H1(Ω) |u(0) = u(1) = 0} (1.4)
eingefuhrt.
Damit erfullt eine klassische Losung u ∈ C2(Ω) ∩ C(Ω) von (1.1) folgende Aufgabe:
Finde u ∈ H10 (Ω) s.d. B(u, v) = l(v) ∀v ∈ C∞
0 (Ω). (1.5)
Wie wir unten (Satz 1.6) sehen werden, ist C∞0 (Ω) dicht im Raum H1
0 (Ω), so daß sich (1.5) sogar aufalle Testfunktionen v ∈ H1
0 (Ω) ausdehnen laßt1, d.h. eine klassische Losung u ∈ C2(Ω)∩C(Ω) erfullt diesog. schwache Formulierung von (1.1):
Finde u ∈ H10 (Ω) s.d. B(u, v) = l(v) ∀v ∈ H1
0 (Ω). (1.6)
(1.2) bzw. (1.6) stellt eine Verallgemeinerung des Losungsbegriffs fur (1.1) dar, denn es gilt
Proposition 1.1 Sei u Losung von (1.6) und gelten zusatzlich die Regularitatsannahmen u ∈ C2(Ω) ∩C(Ω) und f ∈ C(Ω) ∩ L2(Ω). Dann lost u auch (1.1) im klassischen Sinn.
Beweis: Ubung. �
Wir klaren nun den Ableitungsbegriff.
Definition 1.2 Sei Ω ⊂ R ein (offenes) Intervall. Sei u ∈ L2(Ω). Falls es ein v ∈ L1loc(Ω) gibt, s.d.∫
Ω
uϕ′ = −∫
Ω
vϕ ∀ϕ ∈ C∞0 (Ω) (1.7)
so heißt v die schwache (distributionelle) Ableitung von u. Wir schreiben u′ = v.
Satz 1.3 Sei Ω ⊂ R offenes Intervall. D.g.:
(i) Falls u ∈ L2(Ω) eine schwache Ableitung hat, dann ist sie eindeutig.
(ii) u ∈ C1(Ω) =⇒ die schwache Ableitung u′ existiert und stimmt mit der klassischen Ableitung ube-rein.
(iii) Falls u ∈ C1stuckw. ∩ C(Ω), d.h. existiert eine Zerlegung x0 < x1 < · · · < xn mit Ω = (x0, xn) und
u|(xi,xi+1) ∈ C1([xi, xi+1]) fur alle i ∈ {0, . . . , n− 1}. D.g.: die schwache Ableitung u′ existiert undstimmt auf jedem Teilintervall (xi, xi+1) mit der klassischen Ableitung uberein.
Beweis: Ubung �
Damit ist H1(Ω) sinnvoll definiert als der Teilraum von L2(Ω), dessen Elemente schwache Ableitungenhaben, die ebenfalls in L2(Ω) sind. Wir versehen den Vektorraum H1(Ω) mit der Norm
‖u‖2H1(Ω) := ‖u‖2
L2(Ω) + ‖u′‖2L2(Ω). (1.8)
Weiters fuhren wir die H1-Seminorm | · |H1(Ω) ein:
|u|H1(Ω) := ‖u′‖L2(Ω). (1.9)
Um den Raum H10 (Ω) richtig zu definieren, mussen wir wissen, daß (im vorliegenden 1D-Fall) Funktionen
aus dem Raum H1(Ω) stetig auf Ω sind:
Satz 1.4 Sei Ω ⊂ R offenes, beschranktes Intervall. D.g.: H1(Ω) ⊂ C(Ω). Zudem existiert eine Kon-stante C > 0 s.d.
‖u‖C(Ω) ≤ C‖u‖H1(Ω) ∀u ∈ H1(Ω). (1.10)
1man fuhre die Argumente aus!
2

Beweis: Siehe [1, Prop. 1.4.6]. Siehe auch Theorem 1.6. �
Bemerkung 1.5 H1-Funktionen sind eigentlich L2-“Funktionen”, d.h. Aquivalenzklassen von Funktio-nen. Satz 1.4 ist so zu verstehen, daß es in der Aquivalenzklasse einen stetigen Reprasentanten gibt. Imvorliegenden 1D Fall ist dieser Reprasentant sogar absolutstetig.
Satz 1.6 Sei Ω ⊂ R offenes, beschranktes Intervall. D.g.:
(i) H10 (Ω) ⊂ H1(Ω) ist ein abgeschlossener Teilraum.
(ii) ∀x, y ∈ Ω gilt |u(x) − u(y)| ≤√|x− y|‖u′‖L2(Ω) ≤
√diam Ω‖u′‖L2(Ω)
(iii) ∃CΩ > 0 s.d.|u|H1(Ω) ≤ ‖u‖H1(Ω) ≤ CΩ|u|H1(Ω) ∀u ∈ H1
0 (Ω)
Insbesondere ist die H1-Seminorm eine (zur H1-Norm) aquivalente Norm auf H10 (Ω)
(iv) C∞(Ω) ist dicht in H1(Ω)
(v) C∞0 (Ω) ist dicht in H1
0 (Ω)
(vi) H1(Ω) und H10 (Ω) sind vollstandige Raume.
Beweis: (iv): Ubung. (i)–(iii): ebenfalls Ubung (Hinweis: verwenden Sie (iv)). �
Bemerkung 1.7 • H1(Ω) ist ein Hilbertraum mit Skalarprodukt 〈u, v〉H1 :=∫Ω u
′v′ +∫Ω uv.
• H10 (Ω) ist ein Hilbertraum mit Skalarprodukt 〈·, ·〉H1(Ω) oder 〈u, v〉H1
0:=
∫Ω u
′v′.
1.2 Klassische FEM in 1D
Existenz und Eindeutigkeit der Losung u von (1.6) werden noch sehen2. Die FEM ist eine Approximati-onstechnik, um diese Losung zu approximieren.
Sei Ω = (0, 1) unterteilt in M Intervalle Ki = (xi, xi+1), i = 0, . . . ,M − 1, wobei naturlich 0 = x0 <x1 < · · · < xM = 1. Die Intervalle Ki heißen Elemente, die Punkte xi Knoten. Wir bezeichnen mitT := {Ki | i = 0, . . . ,M − 1} das Gitter und hi := xi+1 − xi = diamKi ist die Elementgroße. Wir setzen
S1,1(T ) := {u ∈ H1(Ω) |u|K ∈ P1 ∀K ∈ T } (1.11)S1,1
0 (T ) := S1,1(T ) ∩H10 (Ω) (1.12)
Bemerkung 1.8 Da H1(Ω) ⊂ C(Ω) ist, ist S1,1(T ) gerade der Raum der stetigen Funktionen, dieauf jedem Teilintervall ein Polynom vom Grad 1 sind. Weiters ist S1,1
0 (T ) gerade der Raum derjenigenS1,1(T )-Funktionen, die in den Endpunkten x0, xM verschwinden.
Die Standardbasis des S1,1(T ) wird von den “Hutfunktionen” gebildet:
S1,1(T ) = span{ϕi | i = 0, . . . ,M} (1.13)
ϕi(x) =
⎧⎪⎨⎪⎩
x−xi−1hi−1
x ∈ (xi−1, xi)xi+1−x
hix ∈ (xi, xi+1)
0 sonst
(1.14)
Offensichtlich ist dimS1,1(T ) = M + 1 und eine Basis des Raums S1,10 (T ) ist {ϕi | i = 1, . . . ,M − 1} mit
dimS1,10 (T ) = M − 1 =: N .
2im konkreten Fall folgt dies sofort aus dem Rieszschen Darstellungssatz: B(·, ·) ist gerade das 〈·, ·〉H10
Skalarprodukt
auf dem Hilbertraum H10 (Ω) und fur f ∈ L2(Ω) ist l(·) ein stetiges lineares Funktional auf H1
0 (Ω)
3

In der klassischen FEM wird die Losung u ∈ H10 (Ω) von (1.6) durch die Losung uN ∈ S1,1
0 (T ) derfolgende Aufgabe approximiert:
Finde uN ∈ S1,10 (T ) s.d. B(uN , v) = l(v) ∀v ∈ S1,1
0 (T ). (1.15)
(1.15) stellt ein lineares Gleichungssystem dar: entwickelt man die Funktion uN ∈ S1,10 (T ) in der Basis
{ϕi | i = 1, . . . ,M−1}, so hat es die Form uN =∑N
i=1 uiϕi mit einem Vektor u ∈ RN , der zu bestimmen
ist. Da jedes v ∈ S1,10 (T ) analog als v =
∑Ni=1 viϕi geschrieben werden kann, so ist (1.15) aquivalent zu
Finde u ∈ RN s.d. B(
N∑j=1
ujϕj ,
N∑i=1
viϕi) = l(N∑
i=1
viϕi) ∀v ∈ RN .
Aufgrund des Linearitatseigenschaften von B von l folgt dann, daß dies aquivalent ist mit
Finde u ∈ RN s.d.
∑i,j
ujviB(ϕj , ϕi) =∑
i
vil(ϕi).
Fuhren wir nun die Steifigkeitsmatrix B ∈ RN×N und den Lastvektor l ∈ R
N ein durch
Bij := B(ϕj , ϕi), li = l(ϕi) (1.16)
so erhalten wir, daß (1.15) aquivalent ist zu
Finde u ∈ RN s.d. v�Bu = v�l ∀v ∈ R
N (1.17)
was wiederum aquivalent ist zum folgenden linearen Gleichungssystem:
Finde u ∈ RN s.d. Bu = l (1.18)
Bemerkung 1.9 Das lineare Gleichungssystem (1.18) hat eine eindeutige Losung, weil die Steifigkeits-matrix B SPD ist:
• B symmetrisch, denn die Bilinearform B ist symmetrisch: Bij = B(ϕj , ϕi) = B(ϕi, ϕj) = Bij .
• B ist positiv definit: Fur u ∈ RN definieren wir die zugehorige Funktion u :=
∑Ni=1 uiϕi. D.g.:
u�Bu =∑i,j
ujBui =∑i,j
ujB(ϕj , ϕi)ui = B(u, u) = ‖u′‖2L2(Ω) ≥ 0.
Damit ist u�Bu = 0 genau dann, wenn ‖u′‖L2(Ω) = 0. Die Funktion u ∈ S1,10 (T ) muß u konstant
sein; weil u in den Endpunkten von Ω verschwindet, muß also u = 0 sein.finis 1.Stundefinis 2.StundeDie klassische FEM ergibt sich dann aus folgenden Schritten:
1. Aufstellen des LGS (1.18) (“Assemblieren”)
2. Losen von (1.18)
3. Nachlaufrechnung (typischerweise ist nicht uN von Interessen sondern Großen, die von uN abhangen.)
Fur die Auswertung des Steifigkeitsmatrix B und des Lastvektors l mussen Integrale ausgewertet werden.Da die Integranden auf den Elementen glatt sind, bietet es sich an, die Integral als Summen von Integralenuber Elemente zu schreiben:
Bij =∑K∈T
∫K
ϕ′jϕ
′i, li =
∑K∈T
∫K
fϕi. (1.19)
Damit ergibt sich als Algorithmus zum Aufstellen des LGS (1.18) wie in Alg. 1) dargestellt.
Bemerkung 1.10 Algorithmus 1 wird in der Praxis erheblich anders realisiert:
4

Algorithm 1 Rohfassung des Assemblierens1: B := 0 ∈ R
N×N , l := 0 ∈ RN
2: for K ∈ T do3: for i = 1 : N do4: for j = 1 : N do5: Bij = Bij +
∫K ϕ′
jϕ′i
6: end for7: li = li +
∫Kfϕi
8: end for9: end for
1. B is symmetrisch und sogar ein Tridiagonalmatrix: Bij = 0 fur |i − j| > 1. Dies macht man sichzur Speicherersparnis zunutze (der Speicherbedarf reduziert sich von N2 auf ca. 2N !).
2. Wegen der Tagereigenschaften der Hutfunktionen ϕj kann die Schleife uber j abgekurzt werden:Es genugt die j ∈ {1, . . . , N} zu betrachten, fur die |i− j| ≤ 1 ist.
3. wegen der Tragereigenschaften der Hutfunktionen, mussen in der Schleife uber i auch nur die Indizesi betrachtet werden, fur die gilt: K ⊂ suppϕi. Das sind im vorliegenden 1D Fall hochstens 2.
4. Die Integrale fur die Auswertung der Eintrage des Lastvektors li werden typischerweise mit Qua-draturformeln berechnet.
5. Im Wesentlichen besteht Alg. 1 aus 3 geschachtelten Schleifen, die in jeder Reihenfolge ausgefuhrt werden konnten.
Der Vorteil der “elementbasierten” Fassung (d.h. der vorliegenden Fassung, bei der die Schleife uber die Elemente
die außerste Schleife ist) ergibt sich insbesondere bei Differentialgleichungen mit “komplizierten” Koeffizienten, also
z.B. nichtlineare Probleme oder bei komplizierten Geometrien in 2D oder 3D
1.3 Analyse der 1D FEM
Wir untersuchen den Fehler eN := u − uN , wobei u ∈ H10 (Ω) die Losung von (1.6) und uN ∈ S1,1
0 (T )(1.15) lost. Wir leiten zunachst die Galerkinorthogonalitat her. Die Funktionen u und uN erfullen:
B(u, v) = l(v) ∀v ∈ H10 (Ω)
B(uN , v) = l(v) ∀v ∈ S1,10 (T ) ⊂ H1
0 (Ω)
Betrachtet man in der ersten Gleichung lediglich v ∈ S1,10 (T ) ⊂ H1
0 (Ω) und bildet dann die Differenz derbeiden Gleichungen, so entsteht
B(u, v) −B(uN , v) = 0 ∀v ∈ S1,10 (T );
aufgrund des Linearitat von B im ersten Argument sodann:
B(u − uN , v) = 0 ∀v ∈ S1,10 (T ). (1.20)
Diese Galerkinorthogonalitat fuhrt auf eine Bestapproximationseigenschaft der FEM-Losung uN : Wirhaben namlich fur beliebiges v ∈ S1,1
0 (T )
‖(u− uN)′‖2L2(Ω) = B(u− uN , u− uN)
(1.20)= B(u − uN , u− v) =
∫Ω
(u− uN )′(u − v)′
C.S.≤ ‖(u− uN)′‖L2(Ω)‖(u− v)′‖L2(Ω);
also ‖(u − uN )′‖L2(Ω) ≤ ‖(u − v)′‖L2(Ω). Da v ∈ S1,10 (T ) beliebig war, ergibt sich die Bestapproximati-
onseigenschaft‖(u− uN)′‖L2(Ω) ≤ inf
v∈S1,10 (T )
‖(u− v)′‖L2(Ω). (1.21)
Wir mussen nun dieses Infimum abschatzen. Dies geschieht dadurch, daß ein konkretes v ∈ S1,10 (T )
konstruiert wird. Im nachsten Satz zeigen wir, daß fur hinreichend glatte Losungen u der stuckweiselineare Interpolant das Gewunschte leistet:
5

Satz 1.11 Sei Ω ⊂ R ein offenes Intervall. Sei T ein Gitter auf Ω mit Knoten x0 < x1 < · · · < xM .Sei u ∈ C2(Ω) und Iu ∈ S1,1(T ) der stuckweise lineare Interpolant (d.h. Iu ∈ S1,1(T ) ist durch dieBedingung (Iu)(xi) = u(xi) fur i = 0, . . . ,M gekennzeichnet). Dann existiert ein C > 0, welches nurvon Ω abhangt, so daß∑
K∈T‖u− Iu‖2
L2(K) + h2K‖(u− Iu)′‖2
L2(K) ≤ Ch4‖u′′‖2L2(Ω).
Hier ist h := maxK∈T hK .
Beweis: Wir werden ein analoges Resultat in 2D spater mit Techniken beweisen, die auch in 1D an-wendbar sind. Ein einfacher Beweis im vorliegenden 1D-Fall kann mithilfe des Satzes von Rolle gefuhrt werden. Sei(a, b) = K ∈ T ein Element der Lange hK . Wegen (u − Iu)(a) = (u − Iu)(b) = 0 existiert nach dem Satz von Rolle einξ ∈ K derart, daß (u − Iu)′(ξ) = 0. Also erhalten wir fur jedes x ∈ K die Darstellung
(u − Iu)(x) =
Z x
ξ(u − Iu)′′(t) dt =
Z x
ξu′′(t) dt =
Z x
ξ1 · u′′(t) dt,
weil (Iu)|K ∈ P1. Aus der Cauchy-Schwarz Ungleichung folgt dann
‖(u − Iu)′‖L∞(K) ≤ h1/2K ‖u′′‖L2(K)
und weiter ‖(u − Iu)′‖L2(K) ≤ hK‖u′′‖L2(K). Aus (u − Iu)(a) = 0 erhalten wir mit der Darstellung (u − Iu)(x) =R xa (u − Iu)′(t) dt die Abschatzung
‖u − Iu‖L∞(K) ≤ hK‖(u − Iu)′‖L∞(K) ≤ h3/2K ‖u′′‖L2(K)
und damit ‖u − Iu‖L2(K) ≤ h2K‖u′′‖L2(K). Durch Summation uber alle Elemente ergibt sich dann die gewunschte Be-
hauptung, wenn C = 2 gewahlt wird. �
Die Bestapproximationseigenschaft (1.21) zusammen mit Satz 1.11 erlaubt uns, den FEM-Fehler ab-zuschatzen, falls die gesuchte exakte Losung gewisse Regularitatseigenschaften hat:
Korollar 1.12 Sei u Losung von (1.6) und erfulle die Regularitatsannahme u ∈ C2(Ω). Sei uN ∈S1,1
0 (T ) die Losung von (1.15). D.g.:
‖u− uN‖H1(Ω) ≤ Ch‖u′′‖L2(Ω),
wobei h := maxK∈T hK und die Konstante C > 0 nur von Ω abhangt.
Beweis: (1.21) zusammen mit Satz 1.11 ergeben ‖(u−uN)′‖L2(Ω) ≤ Ch‖u′′‖L2(Ω). Weil u−uN ∈ H10 (Ω)
ergibt sich aus Satz 1.6, (iii), daß ‖u− uN‖H1(Ω) ≤ C‖(u− uN)′‖L2(Ω) ≤ Ch‖u′′‖L2(Ω). �
1.4 Beispiele andere Variationsformulierungen
Die FEM basiert auf einer Variationsformulierung einer Differentialgleichung. Fur das Dirichletproblem(1.1) haben wir oben mit (1.6) eine geeignete Variationsformulierung hergeleitet. In diesem Abschnittsprechen wir kurz weitere Variationsformulierungen fur verwandte Problem an.
1.4.1 wesentliche Randbedingungen (Dirichletbedingungen)
Fur g0, g1 ∈ R betrachten wir
−u′′ = f auf Ω = (0, 1) (1.22a)u(0) = g0, u(1) = g1. (1.22b)
Wie bei der Herleitung von (1.6) ergibt sich als eine Variationsformulierung
Finde u ∈ H1D := {u ∈ H1(Ω) |u(0) = g0, u(1) = g1} s.d. B(u, v) = l(v) ∀v ∈ H1
0 (Ω). (1.23)
Der Raum H1D ist nun ein affiner Raum. Fur die Anwendung der allgemeinen Theorie sowie numerischen
Approximation sind lineare Raume einfacher. Das Problem (1.23) wird deshalb typischerweise umformu-liert. Hierbei macht man den Ansatz u = ug+u0, wobei ug ∈ H1
D (beliebig) gewahlt wird und u0 ∈ H10 (Ω)
6

derart bestimmt wird, daß u die gesuchte Losung ist. Einsetzen dieses Ansatzes in (1.23) liefert, daß u0
folgendes Problem lost:
Finde u0 ∈ H10 (Ω) s.d. B(u0, v) = l(v) −B(u0, v) ∀v ∈ H1
0 (Ω). (1.24)
Die Losung u0 von (1.24) hangt naturlich von der Wahl der Funktion ug ab—die Summe u = ug + u0
ist jedoch eindeutig:
Ubung 1.13 Problem (1.23) hat hochstens eine Losung. �
Die FEM fur (1.22) basiert auf der Formulierung (1.24). Hierzu wird ein ug ∈ H1D gewahlt und dann die
Funktion u0 ∈ H10 (Ω) approximiert durch u0,N ∈ S1,1
0 (T ), welches folgendes Problem lost:
Finde u0,N ∈ S1,10 (T ) s.d. B(u0,N , v) = l(v) −B(ug, v) ∀v ∈ S1,1
0 (T ) (1.25)
Genau wie in Bem. 1.9 sieht man, daß u0,N existiert und eindeutig ist. Es bietet sich im vorliegenden 1D-Fall an, die Funktion ug ∈ S1,1(T )∩H1
D zu wahlen. In diesem Fall ist die Approximation uN := ug+u0,N ∈S1,1(T ) unabhangig von der konkreten Wahl von ug ∈ S1,1(T ) ∩H1
D (man uberzeuge sich davon!). Manwird deshalb ug ∈ S1,1(T )∩H1
D so wahlen, daß die Implementierung einfacher gestaltet wird. Naheliegendist es, ug als affine Funktion zu wahlen, die die Randbedingungen erfullt: ug = g0 +(g1−g0)x. Numerischwird jedoch meist ug ∈ S1,1(T )∩H1
D so gewahlt, daß der Trager von u0 sich auf die beiden Randelementebeschrankt, d.h. ug ∈ S1,1(T ) ist durch die Interpolationsbedingungen
ug(x0) = g0, ug(xM ) = g1, ug(xi) = 0 i = 1, . . . ,M − 1
charakterisiert.
Ubung 1.14 Man schreibe ein Matlabprogramm, welches die obige FEM realisiert fur das Problem(1.22). Eingabe ist ein Vektor x sein, der die Knoten des zu verwendenden Gitters enthalt. Die rechteSeite f sollte als Funktion realisiert sein; als Quadraturformel fur die Bestimmung des Lastvektors kanndie Mittelpunktsregel verwendet werden. Setzen Sie Alg. 1 ein, wobei Sie naturlich die in Bem. 1.10diskutierten Beobachtungen umsetzen.
1.4.2 nichtsymmetrische Bilinearformen
Betrachte
−u′′ + bu′ + cu = f auf Ω = (0, 1) (1.26a)u(0) = u(1) = 0 (1.26b)
fur Konstanten b, c. Eine mogliche Variationsformulierung ist dann:
Finde u ∈ H10 (Ω) s.d. B(u, v) = l(v) ∀v ∈ H1
0 (Ω) (1.27)
wobei die Bilinearform B und die Linearform l gegeben sind durch
B(u, v) =∫
Ω
u′v′ +∫
Ω
bu′v +∫
Ω
cuv, l(v) =∫
Ω
fv (1.28)
Ubung 1.15 Uberlegen Sie sich eine weitere Variationsformulierung fur (1.26), welche ebenfalls auf demRaum H1
0 (Ω) basiert.
1.4.3 naturliche Randbedingungen (Neumannproblem)
Betrachte
−u′′ + u = f auf Ω = (0, 1) (1.29a)u′(0) = g0, u′(1) = g1 (1.29b)
7

fur gegebene g0, g1 ∈ R. Wir suchen wieder eine schwache Losung in H1(Ω). Weil dann u′ ∈ L2(Ω)konnen wir die Randbedingungen (1.29b) nicht stark erzwingen. Wir mussen (1.29b) deshalb in dieVariationsformulierung einbauen, d.h. (1.29b) wird “schwach” realisiert (vgl. Bem. 1.17 unten). Hierzusei v ∈ C∞(Ω). Dann folgt aus (1.29a) fur eine klassische Losung u ∈ C2(Ω) ∩ C1(Ω)
∫Ω
−u′′v + uv =∫
Ω
fv.
Partielle Integration liefert ∫Ω
u′v′ +∫
Ω
uv − u′v′|10 =∫
Ω
fv ∀v ∈ C∞(Ω)
Beobachtet man, daß u′ an den Endpunkten durch (1.29b) gegeben ist, erhalten wir, daß eine klassischeLosung folgendes Problem lost:
Finde u ∈ H1(Ω) s.d. B(u, v) = l(v) ∀v ∈ C∞(Ω), (1.30)
wobeiB(u, v) =
∫Ω
u′v′ + uv, l(v) =∫
Ω
fv + g1v(1) − g0v(0) (1.31)
In Hinblick auf Satz 1.4 ist l ein stetiges lineares Funktional auf H1(Ω). Weiters nutzen wir aus, daßC∞(Ω) dicht liegt in H1(Ω) (siehe Satz 1.6); also folgt durch ein Dichtheitsargument, daß (1.30) sichtatsachlich erweitern laßt zu
Finde u ∈ H1(Ω) s.d. B(u, v) = l(v) ∀v ∈ H1(Ω). (1.32)
Eine Losung u von (1.32) heißt eine schwache Losung von (1.29). (1.32) stellt eine Verallgemeinerungdes klassischen Losungsbegriffs fur (1.29) dar, denn es wird lediglich u ∈ H1(Ω) gefordert und nichtu ∈ C2(Ω) ∩ C1(Ω). Unter Regularitatsannahmen an die schwache Losung ist sie wieder eine klassischeLosung:
Ubung 1.16 Sei u ∈ H1(Ω) eine Losung von (1.32). Erfulle u die Regularitatsannahme u ∈ C2(Ω) ∩C1(Ω). Dann ist u eine klassische Losung von (1.29).
Bemerkung 1.17 Die Behandlung der Randbedingungen (1.29b) ist anders als bei den Dirichletpro-blemen (1.1) oder (1.22). Z.B. beim Problem (1.1) wurden die Randbedingungen “direkt” erzwungen:in der Variationsformulierung fur (1.1) wurde die Losung u wurde in dem Teilraum von H1(Ω) gesucht,welcher die Randbedingungen erfullt, d.h. H1
0 (Ω). Sucht man eine Variationsformulierung fur (1.29), dieauf H1(Ω) basiert, so kann die Randbedingung (1.29b) nicht direkt erzwungen werden, weil u′ ∈ L2(Ω)und damit eine Punktauswertung an den Endpunkten von Ω nicht sinnvoll definiert werden kann. Imobigen Vorgehen werden deshalb die Randbedingungen deshalb in die Variationsformulierung eingebaut(sie finden in der Definition des linearen Funktionals l ihren Niederschlag). Wie Ubung 1.16 zeigt, werdendie Randbedingungen (1.29b) in der Tat erfullt, falls die Losung u ∈ H1(Ω) der Variationsformulierung(1.32) hinreichend glatt ist.
8

Kapitel 2
Abstrakte FEM
2.1 Funktionalanalytische Grundbegriffe
Definition 2.1 (Norm) Eine Norm ‖ · ‖ auf einem Vektorraum V uber R ist eine Abbildung:
‖ · ‖ : V → R
mit
1. ‖x‖ ≥ 0 fur alle x ∈ V ,
2. ‖x‖ = 0 ⇔ x = 0, (Definitheit)
3. ‖λx‖ = |λ|‖x‖ fur alle x ∈ V , (Homogenitat)
4. ‖x+ y‖ ≤ ‖x‖ + ‖y‖ fur alle x, y ∈ V . (Dreiecksungleichung)
Definition 2.2 (Banachraum) Ein normierter Raum (V, ‖·‖) heißt vollstandig, falls jede Cauchyfolgein (V, ‖ · ‖) konvergiert. Vollstandige, normierte Raume heißen Banachraume.
Definition 2.3 (Linearform) Sei V ein Vektorraum. Eine Abbildung l : V → R heißt Linearform oderlineares Funktional, falls
1. l(v + w) = l(v) + l(w) fur alle v, w ∈ V ,
2. l(λv) = λl(v) fur alle v ∈ V, λ ∈ R.
Definition 2.4 (Bilinearform) Sei V ein Vektorraum. Eine Abbildung B : V × V → R heißt Biline-arform, falls fur jedes w ∈ V die Abbildungen
v �→ B(w, v) und v �→ B(v, w)
Linearformen im Sinne von Definition 2.3 sind. B heißt symmetrisch, falls
B(u, v) = B(v, u) fur alle u, v ∈ V.
Eine symmetrische Bilinearform heißt Skalarprodukt oder Innenprodukt, falls sie
1. B(u, u) ≥ 0 fur alle u ∈ V ,
2. B(u, u) = 0 ⇔ u = 0
erfullt.
9

Definition 2.5 Sei V ein Vektorraum, 〈·, ·〉 ein Skalarprodukt auf V . Dann definiert
‖u‖ :=√〈u, u〉
eine Norm auf V . Der normierte Raum (V, ‖ ·‖) heißt Pra-Hilbertraum. Ist (V, ‖ ·‖) vollstandig, so heißt(V, ‖ · ‖) ein Hilbertraum mit Skalarprodukt 〈·, ·〉.
Proposition 2.6 Sei 〈·, ·〉 ein Skalarprodukt auf dem Vektorraum V . Dann gilt die Cauchy-Schwarz’scheUngleichung
|〈u, v〉| ≤√〈u, u〉
√〈v, v〉.
Beweis: Ubung
Definition 2.7 Sei (V, ‖ · ‖), V �= {0}, ein normierter Raum. Eine Linearform l : V → R heißt stetig,falls es eine Konstante Cl > 0 gibt mit
|l(v)| ≤ Cl‖v‖ fur alle v ∈ V.
Die Menge aller stetigen Linearformen wird als Dualraum V ′ bezeichnet.Fur stetige Linearformen l ist die kleinste solche Konstante gegeben durch
‖l‖V ′ := supv∈V,v �=0
|l(v)|‖v‖ . (2.1)
Der Ausdruck (2.1) liefert auf V ′ eine Norm.
Proposition 2.8 Sei (V, ‖ · ‖) ein normierter Raum. Der Dualraum V ′ versehen mit der Norm ‖ · ‖V ′
ist ein vollstandiger normierter Raum.
Beweis: Ubung
Bemerkung 2.9 1. Stetige Linearformen sind auch stetige Funktionen im Sinne der Topologie.
2. Ublicherweise wird der Dualraum V ′ mit der Norm ‖ · ‖V ′ versehen, so daß die Sprechweise ”derDualraum V ′“ impliziert, daß die Norm ‖ · ‖V ′ verwendet wird.
�
Definition 2.10 Sei (V, ‖ · ‖) ein normierter Raum. Eine Bilinearform B : V × V → R heißt stetig,falls es ein M > 0 gibt mit
|B(u, v)| ≤M‖u‖‖v‖ fur alle u, v ∈ V.
Sie heißt koerziv oder V -elliptisch, falls es ein α > 0 gibt mit
α‖u‖2 ≤ B(u, u) fur alle u ∈ V.
Bemerkung 2.11 Eine Bilinearform B, die stetig im Sinne von Def. 2.10 ist auch stetig im Sinne derTopologie (V × V versehen mit der Produkttopologie). Weiter ist die Funktion V → R: u �→ B(u, u)stetig im Sinne der Topologie (Ubung).
10

2.2 Variationsprobleme: Existenz und Eindeutigkeit
Sei V ein Banachraum, B eine stetige Bilinearform und l ∈ V ′. Betrachte:
Finde u ∈ V : B(u, v) = l(v) fur alle v ∈ V. (2.2)
Wir betrachten zuerst den Fall, daß die Bilinearform B symmetrisch ist und fuhren das Losen von (2.2)auf ein Minimierungsproblem zuruck:
Satz 2.12 Sei V ein Vektorraum, B : V × B → R eine symmetrische Bilinearform mit B(u, u) > 0 furalle u �= 0. Sei l : V → R eine Linearform. Definiere
J(u) :=12B(u, u) − l(u).
Dann gilt: u ∈ V ist ein Minimierer von J genau dann, wenn
B(u, v) = l(v) fur alle v ∈ V. (2.3)
Zudem hat (2.3) hochstens eine Losung.
Beweis: Fur v, w ∈ V und t ∈ R gilt
J(w + tv) =12B(w + tv, w + tv) − l(w + tv) = J(w) + t[B(w, v) − l(v)] +
12t2B(v, v). (2.4)
Fur feste v, w ∈ V ist t �→ J(w+ tv) ein quadratisches Polynom. Sei u ein Minimierer von J . Dann folgtaus (2.4) mit w = u und beliebiges v ∈ V fur das quadratische Polynom Q : t �→ J(u + tv), daß es einMinimum bei t = 0 hat, d.h. Q′(0) = 0. Also folgt B(u, v) − l(v) = 0. Da v beliebig, folgt ”⇒“. Geltenun (2.3). Dann folgt aus (2.4) mit t = 1:
J(u + v) = J(u) +12B(v, v)︸ ︷︷ ︸
>J(u) fur alle 0�=v∈V
fur alle v ∈ V,
also ist u Minimierer.Eindeutigkeit: Seien u, u Losungen von (2.2). Dann gilt
B(u, v) = l(v)B(u, v) = l(v)
}⇒ B(u− u, v) = 0 fur alle v ∈ V.
Die Wahl von v := u− u zeigt dann u− u = 0.
Das Funktional J aus Satz 2.12 hat unter geeigneten Annahmen ein Minimum:
Satz 2.13 Sei V ein Hilbertraum, B : V ×V → R eine symmetrische, koerzive und stetige Bilinearformund l : V → R eine stetige Linearform. Sei ∅ �= U ⊂ V eine abgeschlossene, konvexe Menge. Dann gilt:Die Funktion
J : U → R, u �→ 12B(u, u) − l(u)
nimmt ihr Minimum an. Der Minimierer u ∈ U ist eindeutig.
Beweis: Es gilt fur ein α > 0α‖v‖2 ≤ B(v, v) fur alle v ∈ V.
Es gilt daher
J(v) ≥ 12α‖v‖2 − ‖l‖V ′‖v‖ =
12α
(α‖v‖ − ‖l‖V ′)2 − ‖l‖2V ′
2α≥ −‖l‖2
V ′
2α,
11

also ist J nach unten beschrankt und es existiert damit eine Minimalfolge, d.h. (vn)n∈N, mit vn ∈ U, n ∈ N
mitJ(un) →M := inf
v∈UJ(v).
Wir zeigen: (vn)n∈N ist eine Cauchyfolge:
α‖vn − vm‖2 ≤ B(vn − vm, vn − vm) = 2B(vn, vn) + 2B(vm, vm) −B(vn + vm, vn + vm)
= 4J(vn) + 4J(vm) − 8 J(vn + vm
2
)︸ ︷︷ ︸∈U,da Ukonvex
≤ 4 J(vn)︸ ︷︷ ︸→M
+4J (vm)︸︷︷︸→M
−8M
→ 0 fur n,m→ ∞.
Also ist (vn)n∈N eine Cauchyfolge. Da V vollstandig ist, folgt damit die Existenz von u ∈ V mit vn → u.Da vn ∈ U und U abgeschlossen, ist u ∈ U . Weil J stetig ist (cf. Bem. 2.9, 2.11), gilt also
J(u) = limn→∞
J(vn) = M = infv∈U
J(v).
Wir bemerken, daß die obigen Argumente sogar zeigen, daß fur jede Minimalfolge (vn)n∈N gilt: 1.) siekonvergiert, d.h. es existiert v ∈ V mit limn→∞ vn = v und 2.)M = limn→∞ J(vn) = J(v). Eindeutigkeit:Seien u, u zwei Minimierer. Dann ist die Folge (vn)n∈N gegeben durch
vn :={u fur n geradeu fur n ungerade
triviallerweise eine Minimalfolge. Nach Obigem muß die Folge konvergieren. Das impliziert u = u.
Bemerkung 2.14 • Die Wahl U = V ist zugelassen.
• B(·, ·) erzeugt ein Skalarprodukt auf V , d.h. (V,B(·, ·)) ist wieder ein Hilbertraum. Zudem sind dieerzeugten Normen aquivalent.
�
Satze 2.12, 2.13 implizieren den Rieszschen Darstellungssatz:
Satz 2.15 (Rieszscher Darstellungssatz) Sei (V, 〈·, ·〉) ein Hilbertraum. Dann gilt: fur jedes l ∈ V ′
existiert ein eindeutiges ul ∈ V , so daß
l(v) = 〈ul, v〉 fur allev ∈ V.
Umgekehrt erzeugt jedes u ∈ V ein Element lu ∈ V ′ durch die Vorschrift
lu(v) := 〈u, v〉.
Damit ergibt sich, daß der Dualraum V ′ des Hilbertraums V mit V identifiziert werden kann.
Korollar 2.16 Sei (V, 〈·, ·〉) ein Hilbertraum. Dann ist die lineare Abbildung
i : V → V ′, u �→ 〈u, ·〉
ein isometrischer Isomorphismus, d.h.
1. i ist bijektiv,
2. ‖i(u)‖V ′ = ‖u‖V fur alle u ∈ V .
12

Beweis: Ubung
Wir haben bis jetzt das Problem (2.2) unter der Zusatzannahme betrachtet, daß die BilinearformB symmetrisch ist. Wir verwenden nun den Rieszschen Darstellungssatz, um diese Annahme abzu-schwachen.
Satz 2.17 (Lax-Milgram-Lemma) Sei (V, 〈·, ·〉) ein Hilbertraum. Sei B : V × V → R eine stetige,koerzive Bilinearform mit Koerzivitatskonstante α > 0. Sei l ∈ V ′. Dann gilt: Das Variationsproblem
Finde u ∈ V : B(u, v) = l(v) fur alle v ∈ V (2.5)
hat eine eindeutige Losung. Zudem gilt
‖u‖V ≤ 1α‖l‖V ′ ,
d.h. stetige Abhangigkeit der Losung von dem Datum l.
Beweis:
1. Die Bilinearform B ist stetig, d.h. es existiert M > 0 mit
|B(u, v)| ≤M‖u‖‖v‖ fur alle u, v ∈ V.
Fur jedes u ∈ V ist v �→ B(u, v) also ein stetige Linearform. Definiere daher die lineare Abbildung
B : V → V ′, u �→ Bu (= v �→ B(u, v)) .
Sei i : V → V ′ der isometrische Isomorphismus aus Korollar 2.16. Dann gilt fur Bu ∈ V ′, daßi−1Bu ∈ V
〈i−1Bu, v〉 = (Bu)(v) = B(u, v) (2.6)
erfullt. Dies gilt fur alle u, v ∈ V .
2. Die Aufgabe (2.5) ist aquivalent zu:
finde u ∈ V : i−1Bu = i−1l. (2.7)
Aquivalent hierzu ist fur jedes ρ > 0 die folgende Fixpunktgleichung:
finde u ∈ V : u = u− ρ(i−1Bu− i−1l
). (2.8)
3. Die Fixpunktgleichung (2.8) wird mit dem Banachschen Fixpunktsatz gelost. Hierzu genugt es zuzeigen, daß bei geeigneter Wahl von ρ die Abbildung
Tρ : V → V : u �→ u− ρ(i−1Bu− i−1l
)eine Kontraktion ist.Behauptung: Fur ρ ∈ (0, 2α
M2 ) gilt
‖Tρv − Tρw‖ ≤ q‖v − w‖ fur alle v, w ∈ V,
wobei q :=√
1 − 2αρ+ ρ2M2 < 1.Beweis dazu:
‖Tρv − Tρw‖2 = ‖v − w − ρ(i−1Bv − i−1Bw
)‖2
z:=v−w= ‖z − ρi−1Bz‖2
= 〈z, z〉 − 2ρ〈i−1Bz, z〉+ ρ2〈i−1Bz, i−1Bz〉.
Nun gilt wegen (2.6)
〈i−1Bz, z〉 = B(z, z)‖i−1Bz‖2 = 〈i−1Bz, i−1Bz〉 = B(z, i−1Bz) ≤M‖z‖‖i−1Bz‖,
13

also ‖i−1Bz‖ ≤M‖z‖. Es folgt
‖Tρv − Tρw‖2 ≤ ‖z‖2 − 2ρB(z, z) +M2ρ2‖z‖2
≤ ‖z‖2(1 − 2ρα+M2ρ2
)= ‖v − w‖
(1 − 2ρα+M2ρ2
).
Elementare Uberlegungen zeigen, daß fur ρ ∈ (0, 2αM2 ) gilt: q :=
√1 − 2αρ+ ρ2M2 < 1.
2.3 Abstrakte FEM
Die Variationsaufgabe (2.2) ist typischerweise nicht explizit losbar, und man ist deshalb an Approxima-tionen interessiert. Hierzu sei eine Folge (VN )N ∈ N von abgeschlossenen Raumen mit
1. VN = VN fur alle N ∈ N,
2. VN ⊂ V fur alle N ∈ N,
3.⋃
N VN = V .
Die Galerkinapproximation zu (2.2) ist dann:
Finde uN ∈ VN : B(uN , v) = l(v) fur alle v ∈ VN . (2.9)
Wegen der Abgeschlossenheit von VN folgt die Existenz und Eindeutigkeit von (2.9) aus der allgemeinenTheorie:
Satz 2.18 Sei (V, 〈·, ·〉) ein Hilbertraum, B eine stetige, koerzive Bilinearform, l ∈ V ′. Sei VN ⊂ Vabgeschlosser Teilraum. Dann gilt: (2.9) hat eine eindeutige Losung uN ∈ VN .
Beweis: Weil VN abgeschlossen ist, ist (VN , 〈·, ·〉) ein Hilbertraum. Die Aussage folgt dann aus demLax-Milgram-Lemma.
Die Elemente der so konstruierten Folge (uN )N∈N stellen Approximationen an die exakte Losung udes Problems (2.2) dar. Fundamental fur Konvergenzaussagen ist die folgende Betrachtung, die Galer-kinorthogonalitat genannt wird:
B(u− uN , v) = 0 fur alle v ∈ VN (2.10)
Beweis: Es gelten
B(u, v) = l(v) fur alle v ∈ V,
B(uN , v) = l(v) fur alle v ∈ VN .
Subtraktion liefert die Aussage.
Die Galerkinorthogonalitat ist die Grundlage der folgenden, fundamentalen Fehlerabschatzung:
Satz 2.19 (Cea’s Lemma (1964), Quasioptimalitat) Sei (V, 〈·, ·〉) ein Hilbertraum, B eine stetige,koerzive Bilinearform mit
|B(u, v)| ≤M‖u‖‖v‖ fur alle u, v ∈ V und α‖u‖2 ≤ |B(u, u)| fur alle u ∈ V
Sei l ∈ V ′. Sei VN ⊂ V abgeschlossener Unterraum. Sei u durch (2.2) und uN durch (2.9) gegeben. Danngilt:
‖u− uN‖ ≤ M
αinf
v∈VN
‖u− v‖.
14

Beweis: Unter Ausnutzung der Galerkinorthogonalitat erhalten wir fur jedes v ∈ VN :
α‖u− uN‖2 ≤ B(u − uN , u− uN )(2.10)= B(u− uN , u)
(2.10)= B(u− uN , u− v)
≤ M‖u− uN‖‖u− v‖,
also ‖u− uN‖2 ≤ Mα ‖u− v‖. Da v ∈ VN beliebig, folgt die Behauptung.
Bemerkung 2.20 (Quasioptimalitat) Der Fehler ‖u − uN‖ ist bis auf den Faktor Mα so klein, wie
durch Approximation mit Elementen aus VN uberhaupt moglich ist. �
Korollar 2.21 Sei (V, 〈·, ·〉) ein Hilbertraum, B, l mogen die Bedingungen aus Satz 2.19 erfullen. Sein(VN )N∈N eine Folge von abgeschlossenen Unterraumen, so daß
⋃N∈N
VN = V . Dann gilt:
limN→∞
uN = u.
Beweis: Nach Satz 2.19 erfullen die uN :
0 ≤ ‖u− uN‖ ≤ M
αinf
v∈VN
‖u− v‖.
Die Voraussetzung⋃
N∈NVN = V impliziert dann
limN→∞
infv∈VN
‖u− v‖ = 0.
Bemerkung 2.22 Das ”Galerkinverfahren“ (2.9) ist also ein konvergentes Verfahren.
2.3.1 Der koerzive, symmetrische Fall
Wir betrachten koerzive, symmetrische Bilinearformen B. Dann ist (V,B(·, ·)) ein Hilbertraum. Die vomSkalarprodukt B(·, ·) erzeugte Energienorm ist
‖u‖E =√B(u, u).
Die Quasioptimalitatsaussage aus dem Satz 2.19 kann fur diesen Fall verscharft werden:
Satz 2.23 Es mogen die Annahmen von Satz 2.19 gelten. Zusatzlich sei B symmetrisch. Dann gilt:
‖u− uN‖E = minv∈VN
‖u− v‖E und ‖u− uN‖2E = ‖u‖2
E − ‖uN‖2E.
Beweis: Ubung
Bemerkung 2.24 Im symmetrischen Fall ist die Galerkinapproximation also gerade die Bestapproxi-mation. uN kann geometrisch als die Orthogonalprojektion (bzgl. B(·, ·)) von u auf VN gesehen werden.Diese Orthogonalprojektion ist ein stetiger linearer Operator, der als Ritzprojektor bekannt ist:
P : V → VN , u �→ Pu mit B(Pu − u, v) = 0 fur alle v ∈ VN
�
Bemerkung 2.25 Die Beziehung ‖u−uN‖2E = ‖u‖2
E−‖uN‖2E wird in der Praxis oft ausgenutzt, um den
Fehler abzuschatzen, insbesondere in Kombination mit der Monotonieaussagen des folgenden Korollars.�
15

Sind die Raume VN geschachtelt, kann im symmetrischen Fall die Konvergenzaussage aus Korollar 2.21durch eine Monotonieaussage verscharft werden:
Korollar 2.26 Es mogen die Annahmen von Korollar 2.21 gelten. Zusatzlich sei B(·, ·) symmetrischund VN ⊂ VN ′ fur alle N,N ′ ∈ N mit N ≤ N ′. Dann gilt: Die Folge ‖u − uN‖E konvergiert monotongegen 0.
Beweis: Ubung
2.3.2 Bemerkungen zur Realsisierung
In der Praxis sind die Raume VN endlich dimensional. Die Bedingung (2.9) fuhrt dann auf ein linearesGleichungssystem: Sei {ϕ1, . . . , ϕN} eine Basis von VN . Dann ist die gesuchte Losung uN gegeben durchuN =
∑Ni=1 uiϕi, wobei der Vektor u ∈ R
N das lineare Gleichungssystem
Bu = l (2.11)
lost. Dabei ist die Steifigkeitsmatrix B ∈ RN×N gegeben durch
Bij := B(ϕj , ϕi), fur alle i, j ∈ {1, . . . , N}
und der Lastvektor l ∈ RN durch
li := l(ϕi) fur alle i ∈ {1, . . . , N}.
Ist die Bilinearform B koerziv, so gilt
uTBu > 0 fur alle u ∈ RN mit u �= 0. (2.12)
Ist B symmetrisch, so ist B symmetrisch. Bei symmetrischen, koerziven Bilinearformen erhalt man alsolineare Gleichungssysteme mit symmetrischen, positiv definiten Matrize.
Bemerkung 2.27 Aus (2.11), (2.12) kann man fur den Fall von endlich dimensionalen VN die Existenzund Eindeutigkeit einer Losung on (2.9) unmittelbar sehen. (2.9) ist durch die Wahl der Basis {ϕi | i ∈{1, . . . , N}} aquivalent zu (2.11). Das lineare Gleichungssystem ist wegen (2.12) eindeutig losbar. �
16

Kapitel 3
Sobolevraume
Sobolevraume sind Funktionenraume, in denen die Ableitungen in einem Lp-Sinn noch definiert sind,d.h. der Ableitungsbegriff wird erweitert. Historisch gesehen gab es sehr viele verschiedene Definitionen,die sich aber schließlich als aquivalent erwiesen. Diese verschiedenen Zugange kann man noch heute ander Verwendung verschiedener Schreibweisen erkennen (z.B. die austauschbare Verwendung der Bezeich-nungen Hk(Ω) und W k,2(Ω)).
3.1 Sobolevraume und schwache Ableitungen
Der Begriff der schwachen Ableitung ist uber partielle Integration definiert — ein Nebenprodukt ist, daßsich die Formeln fur die partielle Integration auch auf Sobolevfunktionen ubertragen.
Fur Multiindices α ∈ Nn0 und glatte Funktionen ϕ ∈ C∞(Ω,R), Ω ⊂ R
n bezeichnet
Dαϕ die Ableitung∂α1
∂xα11
∂α2
∂xα22
· · · ∂αn
∂xαn1
ϕ.
Definition 3.1 (schwache Ableitung) Sei Ω ⊂ Rn offen. Seien u ∈ L1
loc(Ω), α ∈ Nn0 . Dann heißt
eine Funktion vα ∈ L1loc(Ω) die α-te schwache Ableitung von u, falls∫
Ω
uDαϕ = (−1)|α|∫vαϕ fur alle ϕ ∈ C∞
0 (Ω).
Falls die schwache Ableitung existiert, so ist sie eindeutig (Ubung). Insbesondere ist der Begriff derschwachen Ableitung eine Verallgemeinerung des klassischen Ableitungsbegriffs:
Problem 3.2 Sei u ∈ Ck(Ω) fur ein k ∈ N0. dann existiert fur jedes α ∈ Nn0 mit |α| ≤ k die α-te
schwache Ableitung vα der Funktion u und ist gegeben durch vα = Dαu.
Beweis: Ubung.
Weil fur klassisch differenzierbare Funktionen der klassische Ableitungsbegriff und der Begriff der schwa-chen Ableitung ubereinstimmen, entsteht keine Verwechslungsgefahr, wenn wirDαu fur die α-te schwacheAbleitung schreiben.
Existieren zu einer Funktion u alle schwachen Ableitungen bis zur Ordnung k und falls alle dieseAbleitungen in L2 sind, so ist u ein Element des Sobolevraums Hk:
Definition 3.3 (Sobolevraum Hk) Fur k ∈ N0 heißt der lineare Raum
Hk(Ω) := {u ∈ L2(Ω) | Dαu ∈ L2(Ω) fur alle α ∈ Nn0 , |α| ≤ k} (3.1)
Sobolevraum Hk(Ω). Er wird mit dem Skalarprodukt
〈u, v〉Hk(Ω) :=∑|α|≤k
∫Ω
DαuDαvdx
17
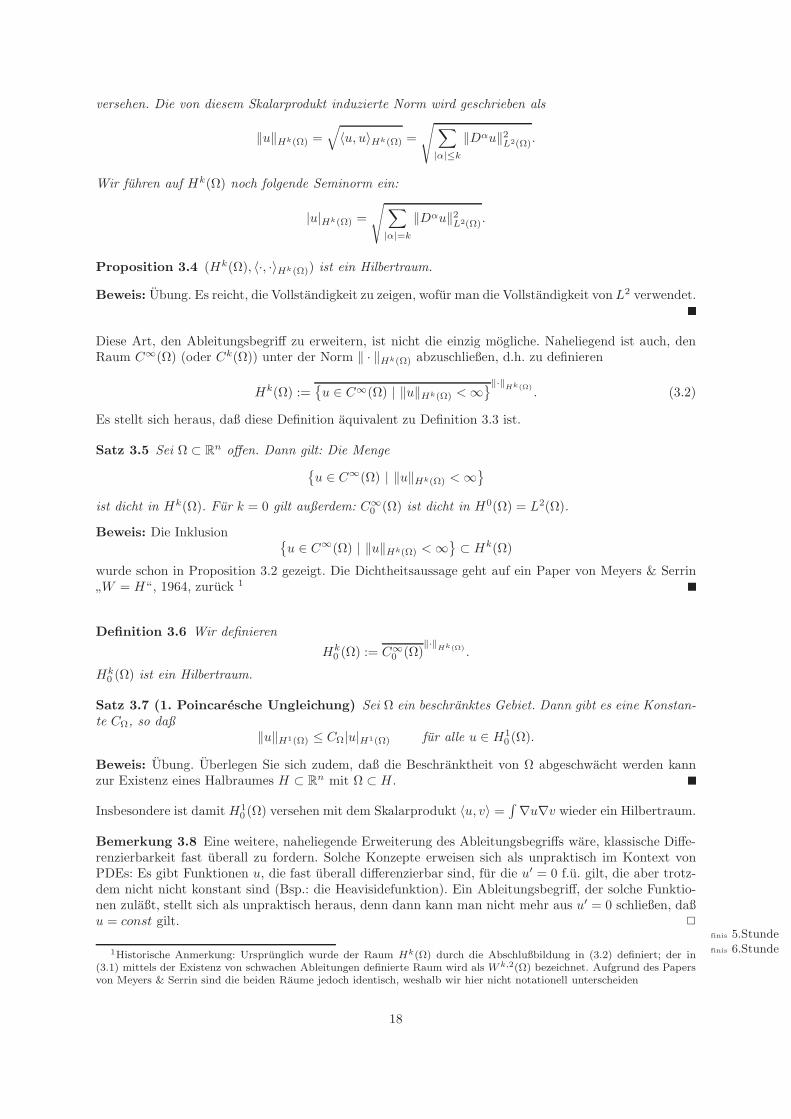
versehen. Die von diesem Skalarprodukt induzierte Norm wird geschrieben als
‖u‖Hk(Ω) =√〈u, u〉Hk(Ω) =
√ ∑|α|≤k
‖Dαu‖2L2(Ω).
Wir fuhren auf Hk(Ω) noch folgende Seminorm ein:
|u|Hk(Ω) =√ ∑
|α|=k
‖Dαu‖2L2(Ω).
Proposition 3.4 (Hk(Ω), 〈·, ·〉Hk(Ω)) ist ein Hilbertraum.
Beweis: Ubung. Es reicht, die Vollstandigkeit zu zeigen, wofur man die Vollstandigkeit von L2 verwendet.
Diese Art, den Ableitungsbegriff zu erweitern, ist nicht die einzig mogliche. Naheliegend ist auch, denRaum C∞(Ω) (oder Ck(Ω)) unter der Norm ‖ · ‖Hk(Ω) abzuschließen, d.h. zu definieren
Hk(Ω) :={u ∈ C∞(Ω) | ‖u‖Hk(Ω) <∞
}‖·‖Hk(Ω)
. (3.2)
Es stellt sich heraus, daß diese Definition aquivalent zu Definition 3.3 ist.
Satz 3.5 Sei Ω ⊂ Rn offen. Dann gilt: Die Menge{
u ∈ C∞(Ω) | ‖u‖Hk(Ω) <∞}
ist dicht in Hk(Ω). Fur k = 0 gilt außerdem: C∞0 (Ω) ist dicht in H0(Ω) = L2(Ω).
Beweis: Die Inklusion {u ∈ C∞(Ω) | ‖u‖Hk(Ω) <∞
}⊂ Hk(Ω)
wurde schon in Proposition 3.2 gezeigt. Die Dichtheitsaussage geht auf ein Paper von Meyers & Serrin
”W = H“, 1964, zuruck 1
Definition 3.6 Wir definieren
Hk0 (Ω) := C∞
0 (Ω)‖·‖
Hk(Ω) .
Hk0 (Ω) ist ein Hilbertraum.
Satz 3.7 (1. Poincaresche Ungleichung) Sei Ω ein beschranktes Gebiet. Dann gibt es eine Konstan-te CΩ, so daß
‖u‖H1(Ω) ≤ CΩ|u|H1(Ω) fur alle u ∈ H10 (Ω).
Beweis: Ubung. Uberlegen Sie sich zudem, daß die Beschranktheit von Ω abgeschwacht werden kannzur Existenz eines Halbraumes H ⊂ R
n mit Ω ⊂ H .
Insbesondere ist damit H10 (Ω) versehen mit dem Skalarprodukt 〈u, v〉 =
∫∇u∇v wieder ein Hilbertraum.
Bemerkung 3.8 Eine weitere, naheliegende Erweiterung des Ableitungsbegriffs ware, klassische Diffe-renzierbarkeit fast uberall zu fordern. Solche Konzepte erweisen sich als unpraktisch im Kontext vonPDEs: Es gibt Funktionen u, die fast uberall differenzierbar sind, fur die u′ = 0 f.u. gilt, die aber trotz-dem nicht nicht konstant sind (Bsp.: die Heavisidefunktion). Ein Ableitungsbegriff, der solche Funktio-nen zulaßt, stellt sich als unpraktisch heraus, denn dann kann man nicht mehr aus u′ = 0 schließen, daßu = const gilt. �
finis 5.Stundefinis 6.Stunde1Historische Anmerkung: Ursprunglich wurde der Raum Hk(Ω) durch die Abschlußbildung in (3.2) definiert; der in
(3.1) mittels der Existenz von schwachen Ableitungen definierte Raum wird als W k,2(Ω) bezeichnet. Aufgrund des Papersvon Meyers & Serrin sind die beiden Raume jedoch identisch, weshalb wir hier nicht notationell unterscheiden
18

3.2 Lipschitzgebiete und Sobolevraume auf Lipschitzgebieten
Wenn Bedingungen an Ω gestellt werden, kann Satz 3.5 verscharft werden. Hierzu fuhrt man den Begriffdes Lipschitzgebietes ein.
Definition 3.9 (Lipschitzfunktion) Sei Ω ⊂ Rn. Eine Funktion ϕ : Ω → R
m heißt lipschitzstetig,falls es eine Konstante L > 0 gibt mit{
‖ϕ(x) − ϕ(y)‖ ≤ L‖x− y‖ fur alle x, z ∈ Ω‖ϕ‖L∞(Ω) ≤ L
Fur lipschitzstetige Funktionen Ω → Rn definieren wir die Norm
‖ϕ‖C0,1(Ω,Rm) := ‖ϕ‖L∞(Ω,Rm) + supx,y∈Ω
‖ϕ(x) − ϕ(y)‖‖x− y‖ .
Der Raum der lipschitzstetigen Funktionen Ω → Rm wird mit C0,1(Ω,Rm) bezeichnet.
Bemerkung 3.10 Die Abhangigkeit der Wahl der Norm auf Rn,Rm haben wir unterdruckt — da in
endlichdimendionalen Raumen alle Normen aquivalent sind, andert sich hochstens L. �
Satz 3.11 Sei Ω ⊂ Rn offen, ϕ ∈ C0,1(Ω,Rm). Dann ist ϕ stetig, beschrankt und fast uberall klassisch
differenzierbar.
Beweis: stetig, beschrankt ist klar. Differenzierbarkeit fast uberall folgt aus Rademachers Satz.
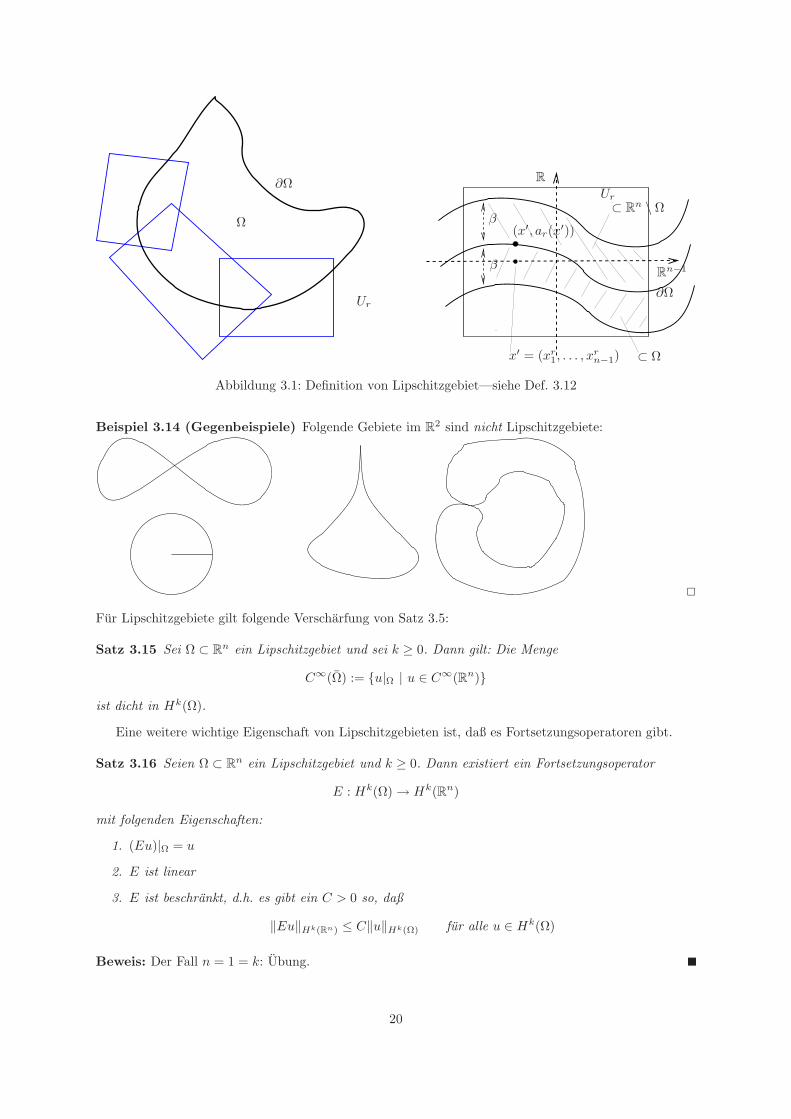
Eine sehr große Klasse von Gebieten ist das der Lipschitzgebiete. Es umfaßt insbesondere Polygone (in2D) und die meisten Typen von Polyedern (in 3D). Die wesentlichen Eigenschaften eines Lipschitzgebietesist, daß es “lokal unterhalb eines Lipschitzgraphen” ist. Die folgende Definition macht dies prazise:
Definition 3.12 (Lipschitzgebiet) Ein beschranktes Gebiet Ω ⊂ Rn hat einen Lipschitzrand, falls es
α, β, β′ > 0 sowie R ∈ N kartesische Koordinatensysteme (br, er1, . . . , e
rn) gibt 2 und R lipschitzstetige
Abbildungen ar : Rn−1 → R
n gibt, so daß folgendes gilt (vgl. Fig. 3.1):
(i) Uberdeckung von ∂Ω: Die offenen Mengen Ur, r = 1, . . . , R, die im KOS (br , er1, . . . , e
rn) jeweils
die Form Bα(0) × (−β′, β′) haben, uberdecken ∂Ω, d.h. ∂Ω ⊂⋃R
r=1 Ur
(ii) ∂Ω ist lokal der Graph einer Lipschitzfunktion: fur jedes r = 1, . . . , R ist ∂Ω∩Ur (im KOS (br, er1, . . . , e
rn))
der Lipschitzgraph {(x′, ar(x′)) |x′ ∈ Bα(0)}
(iii) Ω ist lokal auf einer Seite von ∂Ω: fur jedes r = 1, . . . , R gilt (im KOS (br, er1, . . . , e
rn)):
{(x′, y) |x′ ∈ Bα(0) und ar(x′) − β < y < ar(x′)} ⊂ Ω sowie{(x′, y) |x′ ∈ Bα(0) und ar(x′) < y < ar(x′) + β} ⊂ R
n \ Ω
Bemerkung 3.13 Die Beschranktheit von Ω ist fur uns Teil der Definition von Lipschitzgebiet. Esexistiert in der Literatur eine Verallgemeinerung auf unbeschrankte Gebiete mit Lipschitzrand, die wirhier jedoch nicht betrachten. �
2Ein kartesischer Koordinatenwechsel ist von der Form Fr(x) = Orx + br , wobei br ∈ Rn und Or ∈ R
n×n ortho-gonal. Die Formulierung “im KOS (br , er
1, . . . , ern)” druckt aus, daß wir den Punkt x des affinen Raums R
n mit seinemKoordinatenvektor xr bzgl. des kartesischen KOS (br , er
1, . . . , ern) durch x = br +
Pni=1 xr
i eri identifizieren.
19
Ω
∂Ω
Ur∂Ω
⊂ Rn \ Ω
⊂ Ω
β
β
R
Ur
Rn−1
(x′, ar(x′))
x′ = (xr1, . . . , x
rn−1)
Abbildung 3.1: Definition von Lipschitzgebiet—siehe Def. 3.12
Beispiel 3.14 (Gegenbeispiele) Folgende Gebiete im R2 sind nicht Lipschitzgebiete:
�
Fur Lipschitzgebiete gilt folgende Verscharfung von Satz 3.5:
Satz 3.15 Sei Ω ⊂ Rn ein Lipschitzgebiet und sei k ≥ 0. Dann gilt: Die Menge
C∞(Ω) := {u|Ω | u ∈ C∞(Rn)}
ist dicht in Hk(Ω).
Eine weitere wichtige Eigenschaft von Lipschitzgebieten ist, daß es Fortsetzungsoperatoren gibt.
Satz 3.16 Seien Ω ⊂ Rn ein Lipschitzgebiet und k ≥ 0. Dann existiert ein Fortsetzungsoperator
E : Hk(Ω) → Hk(Rn)
mit folgenden Eigenschaften:
1. (Eu)|Ω = u
2. E ist linear
3. E ist beschrankt, d.h. es gibt ein C > 0 so, daß
‖Eu‖Hk(Rn) ≤ C‖u‖Hk(Ω) fur alle u ∈ Hk(Ω)
Beweis: Der Fall n = 1 = k: Ubung.
20

Ubung 3.17 Fur Hk0 (Ω) kann fur beliebige offene Ω der Fortsetzungsoperator E durch (Eu)|Rn\Ω := 0
definiert werden. �
Satz 3.18 Sei Ω ein Lipschitzgebiet und k ∈ N. Dann gilt: u ∈ Hk(Ω) und |u|Hk(Ω) = 0 impliziert: u istein Polynom vom Grad k − 1.
Beweis: Man beachte, daß Gebiete nach Definition zusammenhangend sind.Wir skizzieren hier den Beweis fur den Fall k = 1. Aus ‖∇u‖L2(Ω) = 0 folgt, daß ∇u = 0. Wir
betrachten nun ein festes zusammenhangendes Ω′ ⊂⊂ Ω und Glattungen uε := u ∗ ρε. Dann gilt (vgl.eine Ubungsaufgabe): ∇uε = (∇u)ε auf Ω′, falls ε < dist(Ω′, ∂Ω). Daraus schließen wir, daß die C∞(Ω)-Fuktion uε die Bedingung ∇uε = 0 auf der zusammenhangenden Menge Ω′ erfullt. Also ist uε|Ω′ = cε ∈ R
konstant. Weil limε→0 uε → u in L2(Ω′) folgt also, daß limε→0 cε existiert. Also konvergiert die Folge(uε) punktweise gegen eine Konstante Funktion. Dieser Limes muß u sein.
Insgesamt erhalten wir, daß u auf jeder zusammenhangenden Menge Ω′ ⊂⊂ Ω konstant ist. Weil Ωzusammenhangend ist, ist damit u konstant auf Ω.
finis 7.Stunde
3.3 Einbettungssatze
Definition 3.19 Seien (V, ‖ · ‖V ), (W, ‖ · ‖W ) normierte Vektorraume. Eine lineare Abbildung K : V →W heißt stetig oder beschrankt, falls es eine Konstante C > 0 gibt, so daß
‖Ku‖W ≤ C‖u‖V fur alle u ∈ V
gilt. Die Norm von K ist gegeben durch
‖K‖ := sup0�=u∈V
‖Ku‖W
‖u‖V.
Ist V Teilmenge von W , so heißt V in W (stetig) eingebettet, falls die Inklusion
i : V →W
stetig ist.
Trivialerweise sind die Sobolevraume L2 = H0 ⊃ H1 ⊃ H2 . . . ineinander eingebettet. Es stellt sich dieFrage, in welcher Beziehung die Raume Hk zu den vertrauten C�(Ω), C�(Ω), Lp(Ω) stehen. Diese Fragenwerden in den Sobolevschen und Kondraovschen Einbettungssatzen beantwortet.
3.3.1 Sobolevsche Einbettungssatze
Satz 3.20 Sei Ω ⊂ Rn ein Lipschitzgebiet. Dann gelten folgende Einbettungen:
Hk(Ω) ⊂
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
Lp(Ω), 1p = 1
2 − kn , fur k < n
2
Lq(Ω), q ∈ [1,∞[, fur k = n2
C0,k−n2 (Ω), fur n
2 < k < n2 + 1
C0,α(Ω), α ∈ [0, 1[, fur k = n2 + 1
C0,1(Ω) = W 1,∞, fur n2 + 1 < k.
Ubung 3.21 • Zeigen sie direkt, daß H1(Ω) ⊂ C0, 12 fur n = 1.
• Sei n = 2 und Ω = B1(0), u(x) = ln(ln(|x|/e)). Zeigen Sie: u ∈ H1(Ω) (sogar u ∈ H10 (Ω)), u ∈ Lq
fur alle q ∈ [1,∞[ aber u /∈ L∞.
21

3.3.2 Kondrasovsche Einbettungssatze
Definition 3.22 Seien (V, ‖ · ‖V ), (W, ‖ · ‖W ) normierte Vektorraume. Eine lineare Abbildung K : V →W heißt kompakt, falls es fur jede beschrankte Folge (un)n∈N in V eine Teilfolge (un′) gibt, so daß(Kun′) in W konvergiert. Ist V Teilmenge von W , so heißt V kompakt in W eingebettet, falls dieInklusion
i : V →W
kompakt ist.
Bemerkung 3.23 Ist i kompakt, dann ist i auch stetig. �
Beispiel 3.24 Nach dem Satz von Arzela-Ascoli ist C0,1([0, 1]) ⊂ C([0, 1]) kompakt.
Satz 3.25 Sei Ω ⊂ Rn ein Lipschitzgebiet. Dann gilt: Die Einbettung
Hk(Ω) ⊂
⎧⎨⎩
Lq(Ω), 1 ≤ q < p mit 1p = 1
2 − kn , fur k < n
2
Lq(Ω), q ∈ [1,∞[, fur k = n2
C0(Ω), fur n2 < k
ist kompakt.
Korollar 3.26 [Rellichscher Auswahlsatz] Seien Ω ⊂ Rn ein Lipschitzgebiet, k < k′. Dann gilt:
Hk′(Ω) ⊂ Hk(Ω)
ist kompakt.
Insbesondere ist H1(Ω) ⊂ L2(Ω) kompakt.
Ubung 3.27 Uberlegen Sie sich, wie Korollar 3.26 aus Satz 3.25 folgt. �
Eine wichtige Anwendung von Korollar 3.26 ist die 2. Poincare’sche Ungleichung:
Satz 3.28 (2. Poincare’sche Ungleichung) Sei Ω ⊂ Rn ein Lipschitzgebiet. Dann existiert ein CΩ >
0 derart, daß
‖u− u‖L2(Ω) ≤ CΩ‖∇u‖L2(Ω) fur alle u ∈ H1(Ω), wobei
u :=1|Ω|
∫Ω
udx.
Beweis: Wir zeigen:
‖v‖H1(Ω) ≤ C[|v| + ‖∇v‖L2(Ω)
]fur alle v ∈ H1(Ω)
Die Behauptung folgt dann leicht, wenn man v := u− u gesetzt wird.Annahme: Es gilt nicht. Dann findet man eine Folge (vn)n∈N in H1(Ω) so daß
‖vn‖H1 > n [|vn| + ‖∇vn‖L2 ] fur alle n ∈ N.
O.B.d.A. ist vn �= 0 und ‖vn‖H1(Ω) = 1 fur alle n ∈ N. Dann gilt:
|vn| + ‖∇vn‖L2(Ω) ≤1n
fur alle n ∈ N ⇒ ‖∇vn‖L2(Ω) → 0 und |vn| → 0.
Aus Korollar 3.26 folgt, daß die in H1(Ω) beschrankte Folge (vn)n∈N eine Teilfolge (vn′)n′∈N hat, diein L2(Ω) konvergiert, d.h. (vn′)n′∈N ist eine Cauchyfolge in L2(Ω). Aus ‖∇vn‖L2 → 0 folgt damit, daß(vn′)n′∈N eine Cauchyfolge inH1(Ω) ist. Aus der Vollstandigkeit vonH1(Ω) ergibt sich damit die Existenzvon v ∈ H1(Ω), so daß
vn′ → v in H1(Ω).
22

Fur v gilt wegen ‖∇vn′‖L2(Ω) → 0, |vn′ | → 0:
‖∇v‖L2(Ω) = 0 und |v| = 0.
Nach Satz 3.18 ist also v konstant. Wegen |v| = 0 ergibt sich v = 0 und ‖v‖H1(Ω) = 0. Andererseits gilt‖v‖H1(Ω) = limn′→∞ ‖vn′‖H(Ω) = 1. �
Die 2. Poincaresche Ungleichung kann wie folgt verallgemeinert werden:
Satz 3.29 (Lemma von Deny & Lions) Seien Ω ⊂ Rn ein Lipschitzgebiet und k ≥ 1. Sei Pk der
Raum der Polynome von Grad k (d.h. u ∈ Pk ⇔ Dαu = 0 ∀|α| = k + 1). Dann existiert C > 0(abhangig von Ω, k), so daß
infv∈Pk−1
‖u− v‖Hk(Ω) ≤ C|v|Hk(Ω) fur alle u ∈ Hk(Ω).
Beweis: Der Beweis ist dem von Satz 3.28 sehr ahnlich (fur k = 1 wird gerade Satz 3.28 reproduziert).Sei Π : L2 → Pk−1 die L2-Projektion.Beh: Es existiert ein C > 0
‖v‖Hk(Ω) ≤ C[|v|Hk(Ω) + ‖Πv‖L2(Ω)
]fur alle v ∈ Hk(Ω) (3.3)
Das gewunschte Ergebnis folgt dann aus
infv∈Pk
‖u− v‖Hk(Ω) ≤ ‖u− Πu‖Hk(Ω) ≤ C[|u|Hk(Ω) + ‖Π(u− Πu)‖L2(Ω)
]= C|u|Hk(Ω)
Die Behauptung (3.3) folgt wieder durch Widerspruch:Annahme: Es existiert eine Folge (vn)n∈N in Hk(Ω) mit
‖vn‖Hk(Ω) = 1 und ‖vn‖Hk(Ω) > n[|vn|Hk(Ω) + ‖Πvn‖L2(Ω)
].
Wie im Beweis von Satz 3.28 existiert dann eine Teilfolge (vn′) und ein v ∈ Hk(Ω), so daß vn′ → v inHk(Ω) und
|v|Hk(Ω) = 0 und ‖Πv‖L2(Ω) = 0
Der Ruckgriff auf Satz 3.18 schließt dann den Beweis ab.
3.4 Spursatz
Der Sobolevsche Einbettungssatz zeigt nur fur n = 1, daß H1(Ω)-Funktionen stetig bis zum Rand sind(genauer: es gibt einen stetigen Reprasentanten). D.h. fur n = 1 hat eine H1(Ω)-Funktion wohldefinierteRandwerte. Weitere Hinweise darauf, daß man eine Chance hat, Funktionen aus Sobolevraumen aufden Rand einzuschranken, ist Satz 3.15, der besagt, daß C∞(Ω) dicht in Hk(Ω) ist; fur die Elementevon C∞(Ω) ist die Spur auf dem Rand in naturlicher Weise definiert und man kann hoffen, dies durchDichtheitsargumente auf Hk(Ω) zu vererben. Dies ist fur Lipschitzgebiete und k ≥ 1 in der Tat der Fall:
Satz 3.30 Sei Ω ⊂ Rn ein Lipschitzgebiet. Dann gilt: Es existiert C(Ω) > 0 derart, daß der Spuroperator
γ0 : C∞(Ω) → L2(∂Ω), u �→ u|∂Ω
die Abschatzung‖γ0u‖L2(∂Ω) ≤ C(Ω)‖u‖H1(Ω) fur alle u ∈ C∞(Ω) (3.4)
erfullt. Insbesondere laßt sich damit der Spuroperator γ0 in eindeutiger Weise zu einem stetigen linearenOperator γ0 : H1(Ω) → L2(∂Ω) fortsetzen.
23

Beweis: Es reicht, (3.4) fur u ∈ C∞(Ω) zu zeigen. Die Verallgemeinerung auf alle u ∈ H1(Ω) folgt dannaus der Stetigkeit und Linearitat von γ0 und der Dichtheit von C∞(Ω) in H1(Ω).
Wir illustrieren die Grundidee des Beweises von (3.4) fur den Spezialfall n = 2 und der Annahme,daß Ω ein konvexes Polygon ist.
O.B.d.A. sei Bρ(0) ⊂ Ω. Wegen der Konvexitat ist zudem Ω sternformig bzgl. 0
Γj0
nj
ρ
nj
Γj
α
x
Nach dem Gaußschen Satz gilt∫∂Ω
v2(x)x · n dx =∫
Ω
∇ ·(v(x)2x
)dx fur alle v ∈ C1(Ω).
Sei nj der außere Normalenvektor auf Γj . Dann gilt
x · nj = |x| cos(α) ≥ dist(0,Γj) ≥ ρ.
Also∫∂Ω
v(x)2x · n dS =∑
j
∫Γj
v(x)2x · nj dS ≥∑
j
∫Γj
v(x)2ρ dS = ρ‖v‖2L2(∂Ω)
Weiterhin:∫Ω
∇ · (v((x)2(x)) =∫
Ω
v(x)2∇ · x+ x · ∇v(x)2 = 2∫
Ω
v(x)2 + 2∫
Ω
(x · ∇v(x))v(x)
≤ 2‖v‖2L2(Ω) + 2 diam(Ω)
∫Ω
|∇v||v| ≤ 2‖v‖2L2(Ω) + 2 diam(Ω)‖v‖L2(Ω)‖∇v‖L2(Ω),
also
ρ‖v‖2L2(∂Ω) ≤ 2‖v‖L2(Ω)
[‖v‖L2(Ω) + diam(Ω)|v|H1(Ω)
]≤ 2(1 + diam(Ω))‖v‖L2(Ω)‖v‖H1(Ω), (3.5)
also
‖v‖2L2(∂Ω) ≤
2(1 + diam(Ω))ρ
‖v‖L2(Ω)‖v‖H1(Ω) ≤2(1 + diam(Ω))
ρ‖v‖2
H1(Ω).
Durch einen Dichteschluß folgt dann der Spursatz fur alle v ∈ H1(Ω).
Bemerkung 3.31 Das Argument laßt sich auch lokalisieren, um die Konvexitatsforderung zu umgehen.�
Der Kern von γ0, d.h. kern(γ0) = {u ∈ H1(Ω) | γ0u = 0} ist wegen der Stetigkeit von γ0 einabgeschlossener Unterraum von H1(Ω); zudem stimmt er mit H1
0 (Ω) uberein:
Satz 3.32 Sei Ω ⊂ Rn ein Lipschitzgebiet. Dann ist
kern(γ0) = {u ∈ H1(Ω) | γ0u = 0} = H10 (Ω)
ist ein abgeschlossener Unterraum von H1(Ω).
Eine naheliegende Frage ist, ob γ0 : H1(Ω) → L2(∂Ω) surjektiv ist. Die ist nicht der Fall; der Raum
H12 (∂Ω) := γ0(H1(Ω))
ist ein echter Teilraum von L2(Ω), den wir mit der Norm
‖u‖H
12 (∂Ω)
:= infU∈H1(Ω),γ0U=u
‖U‖H1(Ω)
versehen.
24

Bemerkung 3.33 Die Aronstein-Slobodeckij-Norm ist definiert durch
‖u‖ :=(‖u‖2
L2(∂Ω) +∫
∂Ω
∫∂Ω
|u(x) − u(y)|2‖x− y‖n+1
dx dy
) 12
.
Sie ist aquivalent zu ‖ · ‖H
12 (∂Ω)
. �
Bemerkung 3.34 Im Rahmen der Spursatzes gilt sogar die sog. multiplikative Spurabschatzung
‖γ0u‖2L2(Ω) ≤ C(Ω)‖u‖H1(Ω)‖u‖L2(Ω).
Ihr Beweis folgt aus dem Spursatz (vgl. (3.5)). �
Ubung 3.35 (Poincaresche Ungleichung) Sei Ω ⊂ R2 ein Lipschitzgebiet und ∅ �= ΓD ⊂ ∂Ω offen.
Definieren Sie H10 (Ω,ΓD) := {u ∈ H1(Ω) | (γ0u)|ΓD = 0}. Zeigen Sie: Es existiert eine Konstante C > 0,
so daß‖u‖H1(Ω) ≤ C|u|H1(Ω) ∀u ∈ H1
0 (Ω,ΓD).
Allgemeiner gilt: Es existiert eine Konstante C > 0, welche nur von Ω und ΓD abhangt, so daß
‖u‖H1(Ω) ≤ C[|u|H1(Ω) + ‖u‖L2(ΓD)
].
�finis 8.Stundefinis 9.Stunde
3.5 Gaußscher Satz — partielle Integration
Fur Lipschitzgebiete ist der Normalenvektor n(x) fur fast jedes x ∈ ∂Ω definiert. Fur Funktionen u ∈C1(Ω), v ∈ (C1(Ω))n gilt der Gaußsche Satz:
∫Ω
u∇ · v = −∫
Ω
∇u · v +∫
∂Ω
uv · n,
der machmal auch in Komponentenschreibweise fur u,w ∈ C1(Ω) geschrieben wird als∫
Ω
u∂iw = −∫
Ω
∂iuw +∫
∂Ω
uwni.
Diese Formeln konnen aufgrund des Spursatzes mit einem Dichteschluß zu Funktionen u ∈ H1(Ω),v ∈ (H1(Ω))n fortgesetzt werden:
Satz 3.36 [Gaußscher Satz] Sei Ω ⊂ Rn ein Lipschitzgebiet. Dann gilt fur alle u ∈ H1(Ω), v ∈ (H1(Ω))n
∫Ω
u∇ · v = −∫
Ω
∇u · v +∫
∂Ω
uv · n.
Korollar 3.37 Sei Ω ⊂ Rn ein Lipschitzgebiet. Dann gilt fur alle u ∈ H2(Ω), v ∈ H1(Ω)
−∫
Ω
�uv =∫
Ω
∇u · ∇v −∫
∂Ω
∇u · n v.
25

Kapitel 4
konforme FEM in 2D
4.1 Variationsformulierung beim homogenen Dirichletproblem
Sei Ω ⊂ R2 ein Polygon. Wir definieren das folgende Modellproblem.
Modellproblem: die Poissongleichung mit homogenen Dirichletbedingungen:
Finde u : −�u = f auf Ω (4.1)u = 0 auf ∂Ω
Um eine Variationsformulierung zu erhalten, multiplizieren wir mit einer Testfunktion v ∈ H10 (Ω) und
integrieren partiell: ∫Ω
f v︸ ︷︷ ︸=:l(v)
=∫
Ω
−�u v =∫
Ω
∇u · ∇v︸ ︷︷ ︸=:B(u,v)
.
Damit B sinnvoll definiert ist, reicht es, u ∈ H1(Ω) zu fordern. Um die Randbedingung u|∂Ω = 0 zuerzwingen, fordern wir u ∈ H1
0 (Ω). Damit ergibt sich als Variationsformulierung:
Finde u ∈ H10 (Ω) : B(u, v) = l(v) fur alle v ∈ H1
0 (Ω). (4.2)
Damit l ∈ (H10 (Ω))′, fordern wir zum Beispiel f ∈ L2(Ω). Nach der allgemeinen Theorie aus Kapitel 2
existiert eine eindeutige Losung u ∈ H10 (Ω) von (4.2).
Bemerkung 4.1 (Regularitat) Es stellt sich die Frage, ob u nicht ”besser“ als H1(Ω) ist. Die Frage,ob eine variationelle Losung ”mehr“ Regularitat hat, beantwortet die sogenannte Regularitatstheorie. Esgilt zum Beispiel:
• Ist Ω glatt berandet, so impliziert f ∈ Hk(Ω), daß die Losung u von (4.2) sogar u ∈ Hk+2(Ω) ∩H1
0 (Ω) erfullt.
• Ist Ω konvex, so folgt aus f ∈ L2(Ω), daß u ∈ H2(Ω) ∩H10 (Ω).
�
Analog zum Vorgehen oben kann man eine Variationsformulierung fur Differentialgleichungen mitvariablen Koeffizienten herleiten:
Ubung 4.2 Sei c ∈ C(Ω,R) A ∈ C1(Ω,R2×) eine auf Ω definierte matrixwertige Funktion, so daß furjedes x ∈ Ω der Wert A(x) ∈ R
2×2 eine symmetrisch positive Matrix ist. Es gelte:
0 ≤ c(x) ≤ ‖c‖L∞(Ω), 0 < λ ≤ A(x) ≤ Λ <∞ auf Ω. (4.3)
Betrachte−∇ · (A(x)∇u) + c(x)u = f auf Ω, u = 0 auf ∂Ω. (4.4)
26

Dann ist die Variationsformulierung:
Finde u ∈ H10 (Ω), s.d. B(u, v) =
∫Ω
∇v · (A(x)∇u)+ c(x)uv = l(v) =∫
Ω
fv ∀v ∈ H10 (Ω). (4.5)
�
4.2 Variationsformulierung bei gemischten Randbedingungen
Wir leiten auch noch die Variationsformulierung fur ein etwas allgemeineres Problem her. Sei wiederΩ ⊂ R
2 ein Polygon. Sei der Rand ∂Ω zerlegt in zwei Teile ΓD (“Dirichletrand”) , ΓN (“Neumannrand”);genauer: wir fordern, daß ΓD und ΓN (endliche) Vereinigungen von offenen Liniensegmenten sind, daß∂Ω = ΓD∪ΓN und daß ΓD∩ΓN = ∅. Seien weiterhin f ∈ L2(Ω) und g ∈ L2(ΓN ) gegeben. Wir betrachtendas folgende Problem:
−Δu+ c(x)u = f auf Ω (4.6a)∂nu = g auf ΓN (4.6b)u = 0 auf ΓD (4.6c)
wobei ∂nu eine Kurzform fur die Normalableitung n · ∇u ist, wenn n den außeren Normalenvektorbezeichnet.
Ziel der Variationsformulierung ist, die Regularitatsanforderung an u zu u ∈ H1(Ω) abzuschwachen.Sei v ∈ H1(Ω). Indem wir (4.6a) mit v multiplizieren, integrieren und partiell integrieren, erhalten wirfur (klassische) Losungen u:
∫Ω
∇u · ∇v + c(x)uv =∫
Ω
fv +∫
∂Ω
∂nuv =∫
Ω
fv +∫
ΓN
∂nuv +∫
ΓD
∂nuv
Auf ΓN ist ∂nu gegeben. Somit erhalten wir:∫Ω
∇u · ∇v + c(x)uv =∫
Ω
fv +∫
ΓN
gv +∫
ΓD
∂nuv
Falls wir schlußendlich lediglich u ∈ H1(Ω) fordern wollen, konnen wir ∂nu|ΓD nicht sinnvoll definieren.Das Integral
∫ΓD
∂nuv lassen wir deshalb dadurch verschwinden, daß wir weitere Bedingungen an dieTestfunktion v stellen: Definieren wir
H10 (Ω,ΓD) := {v ∈ H1(Ω) | (γ0v)|ΓD = 0}, (4.7)
so erhalten wir, daß die (klassische) Losung von (4.6) erfullt:
B(u, v) :=∫
Ω
∇u · ∇v + c(x)uv = l(v) :=∫
Ω
fv +∫
ΓN
gv ∀v ∈ H10 (Ω,ΓD).
Wir beobachten, daß die Bilinearform B bereits sinnvoll definiert ist, wenn nur u ∈ H1(Ω). Bis jetztwurde die Randbedingung (4.6c) nicht benotigt. Wir fordern sie nun explizit, indem wir u ∈ H1
0 (Ω,ΓD)fordern. Damit ergibt sich:
Finde u ∈ H10 (Ω,ΓD), s.d. B(u, v) = l(v) ∀v ∈ H1
0 (Ω,ΓD). (4.8)
Ubung 4.3 a) Sei ΓD = ∅. Zeigen Sie: Die Variationsformulierung (4.8) hat eine eindeutige Losung.
b) Sei ΓN = ∂Ω. Zeigen Sie: Falls 0 < infx∈Ω c(x), dann hat die Variationsformulierung (4.8) hat eineeindeutige Losung. Was passiert im Fall c(x) ≡ 0?
c) Sei c ∈ C(Ω), f ∈ C(Ω), g ∈ C(ΓN ). Sei u ∈ C2(Ω)∩C1(Ω) die Losung von (4.8). Zeigen Sie: u isteine klassische Losung von (4.6), d.h. die Bedingungen (4.6) gelten punktweise. �
27

4.3 FEM in 2D: Dreiecksgitter
4.3.1 Dreiecksgitter und Basisfunktionen
Definition 4.4 (regulare affine Triangulierung) Sei Ω ⊂ R2 ein Polygon. Eine Menge T von Drei-
ecken heißt regulare, affine Triangulierung von Ω, falls
1. jedes K ∈ T ist ein (offenes) Dreieck,
2. K ∩K ′ = ∅ fur K = K ′,
3.⋃
K∈T K = Ω,
4. fur K = K ′ ist
K ∩ K ′ =
⎧⎨⎩
∅,genau ein gemeinsamer Eckpunkt,genau eine gemeinsame Kante,
Die Dreiecke in T heißen Elemente, die Eckpunkte Knoten. Die Knotenmenge wird mit N bezeichnet:
NI := {x ∈ N | x ∈ Ω} Menge der inneren Knoten,ND := N \ NI Randknoten.
Eine Triangulierung heißt γ-formregular, falls
ρK ≤ hK ≤ γρK fur alle K ∈ T ,
wobei ρK der Inkreisradius von K und hK der Durchmesser von K ist.Sei K := {(x, y) | 0 < x < 1, 0 < y < 1 − x} das Referenzdreieck. Mit jedem Element K ∈ T eineraffinen regularen Triangulierung assoziieren wir eine affine, bijektive Elementabbildung:
FK : ¯K → K, x �→ AKx+ bK .
Beobachtung 4.5 F ′K = AK und AK ist regular, weil FK bijektiv ist.
Lemma 4.6 Sei T eine γ-formregulare, regulare, affine Triangulierung. Dann gibt es eine KonstanteC > 0, die nur von γ abhangt, so daß
‖F ′K‖2 ≤ C diam(K) fur alle K ∈ T
‖(F ′K)−1‖2 ≤ C
diam(K)fur alle K ∈ T
Beweis: Wir zeigen die folgende, starkere Aussage:Sei Ω eine offene Menge, F : R
2 → R2 eine affine, bijektive Abbildung, Ω := F (Ω). Seien Bρ ⊂ Ω und
Bρ ⊂ Ω zwei abgeschlossene Kugeln mit ρ, ρ > 0. Dann gilt:
‖F ′‖2 ≤ h
ρ, und ‖(F ′)−1‖2 ≤ h
ρ,
wobei h := diam(Ω) und h := diam(Ω). Wir zeigen nur ‖F ′‖2 ≤ hρ (andere Abschatzung analog). Sei
ξ ∈ R2 mit ‖ξ‖2 = ρ, so daß ‖F ′ξ‖2
‖ξ‖2= ‖F ′‖2. Nach Voraussetzung finden wir x, y ∈ Bρ mit x − y = ξ.
Also wegen F (x) = F ′x+ b
‖F ′‖2 =1
‖ξ‖2‖F ′ξ‖2 =
1ρ‖F (x) − F (y)‖2 ≤ h
ρ
Sei T eine regulare, affine Triangulierung von Ω. Wir definieren
S1,1(T ) := {u ∈ H1(Ω) | u|K ∈ P1, fur alle K ∈ T }S1,1
0 (T ) := S1,1(T ) ∩H10 (Ω)
(4.9)
28

−1−0.5
00.5
1
−1
−0.5
0
0.5
1
0
0.2
0.4
0.6
0.8
1
1
3
2
Abbildung 4.1: links: Hutfunktion, die mit einem Knoten assoziiert ist. Rechts: Referenzelement.
Bemerkung 4.7 • Da die Funktionen aus S1,1(T ) stuckweise glatt sind, hatten wir aquivalent
S1,1(T ) = {u ∈ C(Ω) | u|K ∈ P1, fur alle K ∈ T }
schreiben konnen.
• Die Elementabbildungen FK sind affin, d.h. u ∈ P1 ⇔ u◦FK ∈ P1. Wir konnen also auch definieren:
S1,1(T ) = {u ∈ H1(Ω) | u ◦ FK ∈ P1, fur alle K ∈ T }. (4.10)
In Hinblick auf die noch spater zu behandelnden Elemente mit gekrummten Randern erweist essich als zweckmaßig, (4.10) als Definition von S1,1(T ) zu verwenden. Von nun an werden wir diesauch tun.
�
Die Standardbasis (“Knotenbasis”) B des S1,1(T ) sind die ”Hutfunktionen“ (auch: Knotenformfunktio-nen). Sie sind charakterisiert durch die Bedingung
ϕi(xj) = δij , fur alle i, j ∈ {1, . . . ,#N},
wobei N = {x1, . . . , x#N }. Analog ist die Basiswahl B0 fur S1,10 (T ).
4.3.2 Assemblierenvielleichtsollte mandoch dieT -Matrizeneinfuehrenanstatt dieAbbildungenTK—diesetauchenspaetestensbei haengen-den Knoten“natuerlich”auf
Mit den Hutfunktionen konnen wir Basen von Teilraumen von H1(Ω) erzeugen. Damit kann dann dieFEM-Formulierung als lineares Gleichungssystem geschrieben werden und gelost werden, wie wir diesabstrakt im Abschnitt 2.3.2 gesehen haben. Wir fuhren das Vorgehen am Beispiel des Problems ausUbung 4.2 vor. Sei
B(u, v) =∫
Ω
∇u · (A(x)∇v) + c(x)uv, l(v) =∫
Ω
fv;
die FEM-Formulierung ist damit:
Finde uN ∈ S1,10 (T ), s.d. B(uN , v) = l(v) ∀v ∈ S1,1
0 (T ),
Sei B0 = {ϕi | i = 1, . . . ,#NI} die oben bestimmte Basis aus Hutfunktionen, die mit inneren Knotenassoziiert ist. Wie im Abschnitt 2.3.2 beschrieben, kann die gesuchte Losung uN entwickelt werden alsuN =
∑#NI
i=1 ϕiui; der gesuchte Vektor u ∈ R#NI lost das lineare Gleichungssystem
Bu = l, Bi,j = B(ϕj , ϕi), li = l(ϕi).
29

Das Aufstellen der Steifigkeitsmatrix B mit
Bi,j = B(ϕj , ϕi)
und des Lastvektors kann genau wie in Algorithmus 1 elementbasiert realisiert werden. Hierzu schreibenwir die Integrale zuerst als Summe von Integralen uber die Elemente und transformieren alle Elemen-tintegrale auf Integrale uber das Referenzelement K. Mit Abkurzungen von der Art ϕi = ϕi|K ◦ FK ,A = A ◦ FK , etc. erhalt man dann
B(ϕj , ϕi) =∑K∈T
∫K
∇ϕj · (A(x)∇ϕi) + c(x)ϕjϕi =∑K∈T
K⊂suppϕj∩suppϕi
∫K
∇ϕj · (A(x)∇ϕi) + c(x)ϕjϕi
=∑K∈T
K⊂supp ϕj∩suppϕi
∫bK
{∇ϕj · (F ′
K)−1A (F ′
K)−� ∇ϕi + cϕjϕi
}| detF ′
K | (4.11)
Analog ergibt sich fur den Lastvektor
l(ϕi) =∑K∈T
∫K
f ϕi| detF ′K |. (4.12)
Weiterhin definieren wir die Elementformfunktionen
N1(ξ, η) = 1 − ξ − ηN2(ξ, η) = ξN3(ξ, η) = η
(4.13)
und definieren fur jedes Element K ∈ T die Elementsteifigkeitsmatrix BK ∈ R3×3 und den Elementlast-
vektor l ∈ R3 durch
BKij :=
∫K
(∇Nj · (F ′
K)−1AK(F ′K)−T∇Ni + cNjNi
)| detF ′
K |dξ, i, j = 1, 2, 3
lKi :=∫
KfNi| detF ′
K |dξ, i = 1, 2, 3(4.14)
Wir beobachten nun eine Beziehung zwischen den Elementfunktionen Ni und den Hutfunktionen ϕj :Offensichtlich ist Ni ∈ P1, und Ni ist 1 in genau einer Ecke des Dreiecks K und verschwindet inden anderen beiden. Weil die Elementabbildungen FK affin sind, bemerken wir somit, daß fur jedeHutfunktion ϕi gilt:
ϕi|K ◦ FK ∈ {N1, N2, N3}, falls supp(ϕi) ∩K = ∅.Damit bemerken wir, daß die Summanden in (4.11) und (4.12) mit einigen Eintragen der Element-steifigkeitsmatizen BK und der Elementlastvektoren lK ubereinstimmen. Es muß somit nur noch dieBeziehungen zwischen den ϕi|K und den Elementformfunktionen herausgefunden werden. Dies geschiehtformal dadurch, daß fur jedes K ∈ T die Menge DofK ⊂ {1, 2, 3} der (fur Element K) relevantenElementformfunktionen festlegen durch
DofK = {i ∈ {1, 2, 3} | ∃j : ϕj |K ◦ FK = Ni}.
Ferner ist TK : DofK → {1, . . . ,#NI} bestimmt durch die Relation
ϕTK(i) ◦ FK = Ni,
d.h. TK(i) gibt an, zu welcher globalen Formfunktion die i-te Elementformfunktion des Elementes Kbeitragt.
Bemerkung 4.8 Beim vorliegenden Fall, daß nur die Hutfunktionen aus B0 betrachtet werden, sind die Mengen DofK ={1, 2, 3} fur alle Dreiecke K ∈ T , die “nicht am Rand sind”, d.h. K ⊂ Ω. Fur die Dreiecke K mit K ∩ ∂Ω �= ∅ istDoFK
� {1, 2, 3}. Die Mengen DofK hangen somit von der Art des Randbedingungen des betrachteten Variationsproblemsab. �
Damit ergibt sich als Algorithmus zur Berechnung der Steifigkeitsmatrix B:
30

Algorithmus 4.9
B=0; l:=0;for K ∈ T dobegin
berechne BK, lK nach (4.14)bestimme DofK , TK
for i ∈ DofK dobeginlTK(i) := lTK(i) + lKifor j ∈ DofK do
BTK(i)TK(j) := BTK(i)TK(j) + BKij ;
endend
Bemerkung 4.10 Die Beobachtungen bzgl. der Schwachbesetztheit von TK aus dem 1D-Fall greifenanalog. Insbesondere wird man die Steifigkeitsmatrix B nicht als volle Matrix abspeichern sondern ineinem geeigneten sparse matrix format (z.B. als Bandmatrix).
Weiterhin mussen i.a. die Elementsteifigkeitsmatrix BK und der Elementlastvektor iK mittels nume-rischer Quadratur ausgewertet werden. �
4.3.3 Anmerkungen zum Assemblieren
In der Praxis ergibt sich die Konstruktion der Abbildungen TK dadurch, daß typischerweise eine Num-merierung der Knoten N der Triangulierung T vorliegt. Genauer: In traditionellen FEM-Codes wirddie Triangulierung dadurch festgelegt, daß eine Knotenliste vorliegt (jeder Knoten hat eine Nummerund wird durch seine Koordinaten beschrieben) und daß eine Elementliste vorliegt, in der jedes Dreieckdurch seine 3 Eckpunkte beschrieben wird. Ordnet man nun fur jedes Element K die drei Eckpunktedes Referenzelementes K den drei Eckpunkten des Dreiecks K zu, so definiert dies zum einen die affineElementabbildung FK , zum anderen ergibt sich so in naturlicher Weise eine Abbildung
TK : {1, 2, 3} → {1, . . . ,#N},
welche man fur die Konstruktion der Knotenbasis B einsetzen kann. Falls man Probleme mit (homogene)Dirichletrandbedingungen betrachtet, dann werden ergeben sich die Abbildungen TK aus dem Abbildun-gen TK durch Einschrankung des Definitionsbereichs in der Art, daß nur auf innere Knoten NI abgebildetwird.
Bemerkung 4.11 Oft werden homogene Dirichletrandbedingungen anders realisiert. Es werden in ei-nem ersten Schritt die Steifigkeitsmatrix B und der Lastvektor l aufgestellt, die zur Basis B des RaumsS1,1(T ) gehoren. (Wie wir noch sehen werden, entspricht dies dem “Neumannproblem”). In einem zwei-ten Schritt wird die gesuchte Steifigkeitsmatrix B aus B gewonnen, indem Zeilen und Spalten gestrichenwerden, die zu Randknoten aus ND gehoren; analog wird der gesuchte Lastvektor l durch Streichen derZeilen von l erhalten, die ebenfalls zu Randknoten gehoren. �
Bemerkung 4.12 (Wahl der Knotennummerierung) Die globale Nummering von NI beeinflußtdie Besetzungstruktur von B. Dies hat einen großen Einfluß auf den Speicherbedarf und die Rechenzeitenbeim Losen des linearen Gleichungssystems, falls ein direkter Loser (d.h. LU-Faktorisierung oder Cho-leskyfaktorisierung der Steifigkeitsmatrix) eingesetzt wird. Das Problem ist bei Verwendung modernerdirekter Loser jedoch nicht ganz so kritisch, weil diese typischerweise intern eine geeignete Umnumme-rierung der Unbekannten durchfuhren. �
Ubung 4.13 Schreiben Sie ein Programm, daß die Steifigkeitsmatrix und den Lastvektor fur das Mo-dellproblem −Δu = f bestimmt. Das Programm soll folgende Dateien einlesen: a) datei.node, welche eineKnotenliste und die Koordinaten der Knoten enthalt; b) datei.ele, welche eine Elementliste enthalt und
31

jedes Element durch die Nummern der drei Eckpunkte charakterisiert; c) datei.edge, welche eine Liste derKanten enthalt und fur jede Kanten einen “Marker” bereitsstellt, der angibt, ob die Kante Dirichletrand-bedingungen tragt. Fur die genauen Dateikonventionen, siehe http://www.cs.cmu.edu/~quake/triangle.html
�
4.4 FEM in 2D: Vierecksgitter
In der Praxis werden noch andere Elementtypen verwendet, z.B. Viereckselemente.
Definition 4.14 (regulare, geradlinige Triangulierungen, bestehend aus Dreiecken und Vierecken)Eine Menge T von Elementen K ∈ T heißt regulare, gradlinige Triangulierung, falls
1. jedes K ∈ T ist entweder ein Dreieck oder ein Viereck,
2. Bedingungen 2.-4. von Definition 4.4 gelten.
Das Referenzviereck ist K� = (0, 1)2. Auf dem Referenzviereck definieren wir
N1(ξ, η) = (1 − ξ)(1 − η)N2(ξ, η) = ξ(1 − η)N3(ξ, η) = ξηN4(ξ, η) = (1 − ξ)η
(4.15)
1
34
2
Beobachtung 4.15 span{Ni | i = 1, . . . , 4} = span{xiyj | 0 ≤ i, j ≤ 1} = Q1 Allgemeiner definierenwir: Qp := span{xiyj | 0 ≤ i, j ≤ p}.
A1A2
A3
A4
K
Seien Ai, i = 1, . . . , 4 die vier Eckpunkte von K, die im mathe-matisch positiven Sinne durchnummeriert sind. Dann ist
FK : K� → K, (ξ, η) �→4∑
i=1
Ni(ξ, η) (4.16)
die Elementabbildung.
Bemerkung 4.16 (Eigenschaften von FK) • Seiten von K werden auf Seiten von K abgebildet,
• auf jeder Seite ist FK affin,
• sind die Punkte Ai in allgemeiner Lage, so ist FK invertierbar.�
Der Raum S1,1(T ) wird dann definiert als
S1,1(T ) :={u ∈ H1(Ω) |
{u ◦ FK ∈ P1, falls K ein Dreiecku ◦ FK ∈ Q1, falls K ein Viereck fur alle K ∈ T
}
S1,10 (T ) := S1,1(T ) ∩H1
0 (Ω).
Bemerkung 4.17 Man beachte: Im Allgemeinen ist u ∈ S1,1(T ) nicht mehr stuckweise ein Polynom,weil fur allgemeine Vierecke K u|K von der Form u|K = π ◦ F−1
K fur ein π ∈ Q1 ist, wobei F−1K rational
ist. �
32

Es gibt eine Basis von S1,1(T ), die ”knotenbasiert“ ist, d.h. B = {ϕi} mit ϕi(xj) = δij , wobei xj ∈ N .Diese Bedingung legt die Basis bereits eindeutig fest. Es gilt wieder
ϕi|K ◦ FK ∈{
{N1, N2, N3} mit Ni aus (4.13), falls K ein Dreieck{N1, N2, N3, N4} mit Ni aus (4.15), falls K ein Viereck ,
falls supp(ϕi) ∩K = ∅. Wir zeigen, daß ϕi mit ϕi(xj) = δij existieren und eindeutig sind.
1. Konstruktion von ϕi: ϕi wird elementweise definiert, indem ϕi|K fur jedes K ∈ T definiert wird.Sei K ∈ T . Dann gilt: Falls xi nicht Ecke von K ist, dann gilt ϕi(v) = 0 fur alle Ecken v, alsoϕi|K := 0. Falls xi eine Ecke von K ist, dann gilt fur ϕi|K ◦ FK :
(a) K ist ein Dreieck : Dann ist ϕi|K ◦ FK ∈ P1 und ϕi|K ◦ FK ist in genau einer Ecke von Kgleich 1 und verschwindet in den anderen beiden. Also gilt ϕi|K ◦ FK ∈ {N1, N2, N3}, wobeiNi in (4.13) definiert sind.
(b) K ist ein Viereck : Dann ist ϕi|K ◦ FK ∈ Q1 und ϕi|K ◦ FK ist in genau einer Ecke von Kgleich 1 und verschwindet in den anderen drei. Also gilt ϕi|K ◦ FK ∈ {N1, N2, N3, N4}, wobeiNi in (4.15) definiert sind.
2. Es bleibt zu zeigen, daß ϕi ∈ H1(Ω), d.h. stetig an den Elementkanten ist. Hierzu beobachtetman, daß fur jede Kante der Grenzwert von ”beiden Seiten her “eine affine Funktion ist. und dasder Grandzwert in den Knoten der Triangulation ubereinstimmen. Das ergibt Stetigkeit uber dieKanten.
Das Assemblieren der globalen Steifigkeitsmatrix geht mit einem Algorithmus analog zu Algorith-mus 4.9. Beim Aufstellen der Elementsteifigkeitsmatrizen fur Viereckselemente ist zu beachten, daßFormel 4.14 zwar gilt, aber nun F ′
K nicht mehr konstant ist.
Bemerkung 4.18 Randbedingung fur Vierecke baut man analog ein zu den Randbedingungen bei Drei-ecken. �
4.5 Elemente hoherer Ordnung
4.5.1 Elemente hoherer Ordnung in 1D
Wir betrachten ein Gitter T mit Knoten xi, i = 0, . . . ,M ,auf einem Intervall Ω ⊂ R. Anstelle vonstuckweise linearen Approximationen (“linearen Splines”) konnen wir auch mit stuckweise Polynomenhoherer Ordnung approxmieren. Dies fuhrt uns auf FEM-Raume der folgenden Form:
Sp,1(T ) := {u ∈ H1(Ω) |u|K ◦ FK ∈ Pp ∀K ∈ T }, (4.17a)
Sp,10 (T ) := Sp,1(T ) ∩H1
0 (Ω) (4.17b)
Hier sind die Abbildungen FK : K → K wieder die affinen Elementabbildungen.
Bemerkung 4.19 Da die Elementabbildungen affin sind, ist u|K ◦ FK ein Polynom vom Grad p genaudann wenn u|K ein Polynom von Grad p ist. Wir hatten also genausogut Sp,1(T ) als {u ∈ H1(Ω) |u|K ∈Pp∀K ∈ T } definieren konnen. Die Definition (4.17) kann jedoch auf nichtaffine Elementabbildungenverallgemeinert werden—die andere nicht. �
Wir geben nun eine Basis von Sp,1(T ) (bzw. Sp,10 (T )) an. Wie in den vorangegangen Fallen wird die
Basis explizit auf dem Referenzelement definiert und damit implizit auf den Elementen. Auf K = (−1, 1)wahlen wir eine Basis {Ni | i = 1, . . . , p+ 1} des Polynomraums Pp mit folgenden Eigenschaften:
N1(ξ) =12(1 − ξ), N2(ξ) =
12(1 + ξ), Ni(±1) = 0 i ≥ 3.
33

Beispiel 4.20 Die Basisfunktionen Ni konnen ziemlich frei gewahlt werden. Die einfachste Moglichkeitist, Ni(ξ) = (1 − ξ2)ξi−3 fur i ∈ {3, . . . , p + 1} zu wahlen. Falls p “klein” ist (sagen wir: p ≤ 4), dannist dies eine akzeptable Wahl. Falls jedoch p groß ist, dann fuhrt diese Wahl der Basis auf sehr schlechtkonditionerte Probleme. Es wird dann empfohlen, folgende Wahl zu treffen:
Ni(ξ) =∫ ξ
−1
Li−2(t) dt, (4.18)
wobei die Funktion Li ∈ Pi das i-te Legendrepolynom ist. Aufgrund der Orthogonalitatseigenschaftenvon Legendrepolynomen gilt tatsachlich Ni(±1) = 0 fur i ≥ 3. 1
Die Tatsache, daß die Formfunktionen Ni fur i ≥ 3 an den Endpunkten des Referenzelements verschwin-den, erlaubt uns nun, in einfacher Weise eine Basis der Raume Sp,1(T ) und Sp,1
0 (T ) anzugeben. EineBasis von Sp,1(T ) ist
B = Blin ∪(∪K∈T BK
), (4.19)
wobei die Menge Blin = {ϕi | i = 0, . . . ,M} die zu den Knoten xi, i = 0, . . . ,M gehorenden Hutfunktionensind. Wir schreiben die Menge BK als BK = {ϕK,i | i = 3, . . . , p+1}, wobei die Funktionen ϕK,i definiertsind als:
ϕK,i(x) =
{Ni(F−1
K (x)) x ∈ K
0 x ∈ Ω \K
Weil die Funktionen Ni fur i ≥ 3 die Eigenschaft Ni(±1) = 0 haben, gilt: ϕK,i ∈ H1(Ω) und suppϕK,i ⊂K.
Bemerkung 4.21 Die Basis B hatte auch alternativ folgendermaßen charakterisiert werden konnen:ϕ ∈ B genau dann, wenn folgendes gilt: entweder existiert ein Knoten xi, so daß ϕ gerade die zugehorigeHutfunktion ist oder es existiert ein eindeutiges K ∈ T sowie ein eindeutiges i ∈ {3, . . . , p + 1} derart,daß suppϕ ⊂ K und ϕ|K ◦ FK = Ni. �
Wir beobachten bei der in (4.19) definierten Basis ein typisches Konstruktionselement in der FEM:Die “Formfunktionen” (d.h. die Basis des FEM-Raumes) werden mit geometrischen Objekten assoziiert:die Knotenformfunktionen ϕi denkt man sich an die Knoten gekoppelt wahrend die Funktionen ϕK,i
zum Element K gehoren. Weiterhin beobachten wir, daß nach Konstruktion alle Basisfunktionen ϕ ∈ Bdie Bedingung erfullen: ϕ|K ◦ FK ∈ {0, N1, . . . , Np+1}, d.h. entweder verschwindet ϕ auf einem Elementoder es ist genau eine der Funktionen Ni.
Ubung 4.22 Schreiben Sie einen 1D FEM code, der mit dem Ansatzraum Sp,10 (T ) arbeitet. Die Form-
funktionen Ni sollen dabei wie in (4.18) gewahlt werden. �
4.5.2 Elemente hoherer Ordnung in 2D
Genau wie in 1D kann man auch Raume hoherer Ordnung definieren. Wir fuhren dies fur DreiecksgitterT in Sinne von Definition 4.4 vor: Der Ansatzraum ist dann
Sp,1(T ) := {u ∈ H1(Ω) | u|K ◦ FK ∈ Pp},
bzw. Sp,10 (T ) := Sp,1(T ) ∩H1
0 (Ω).Bei der Konstruktion der Basis der FE-Raume haben wir (explizit oder implizit) folgende “Regeln”
beachtet:
1. Die Basisfunktionen ϕ ∈ B haben auf dem Referenzelement K einfache Struktur, d.h. fur jedesElement K ∈ T war ϕ|K ◦ FK ∈ {0, N1, N2, . . . , }, wobei die Menge {0, N1, . . . , } explizit bekanntist.
1Fur die praktische Implementierung ist entscheidend, daß fur große i die Funktionen Ni aus (4.18) effizient ausgewertet
werden konnen. Zum einen gilt (2i + 1)R ξ−1
Li(t) dt = Li+1(ξ) − Li−1(ξ) und zum anderen konnen die Legendrepolynomemittels einer Dreitermrekurrenzrelation schnell ausgewertet werden.
34
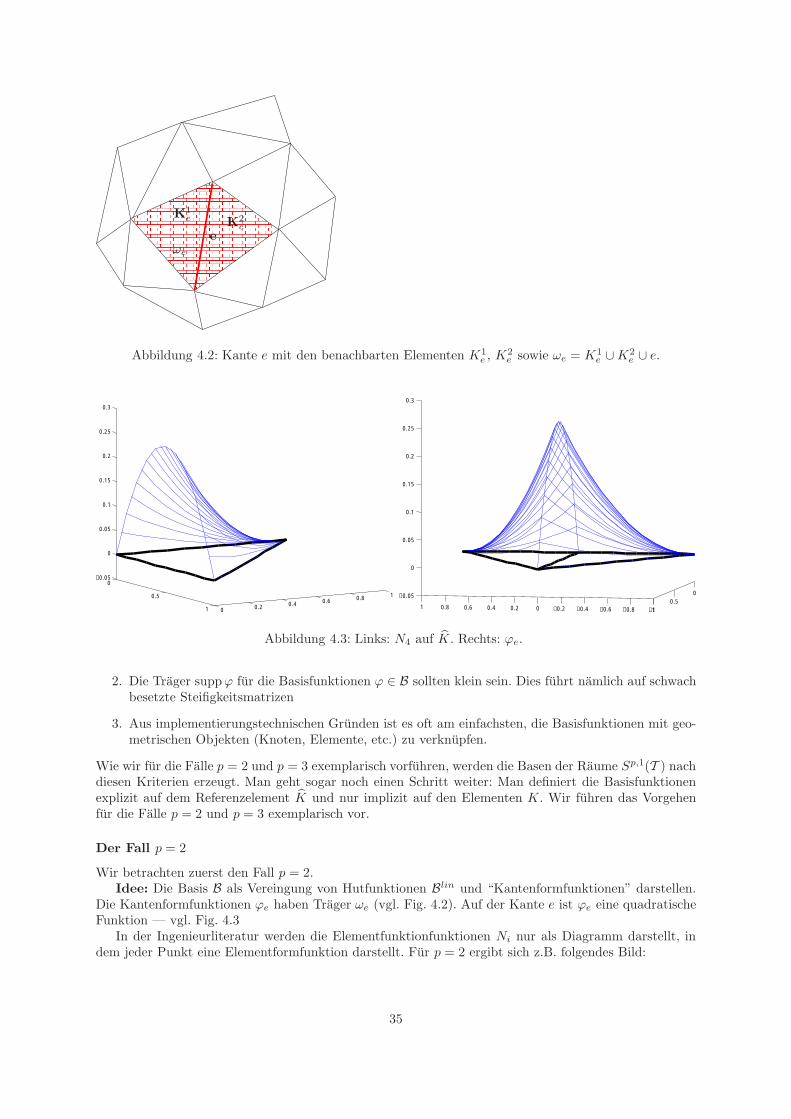
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
�������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ωe
e
K1e K2
e
Abbildung 4.2: Kante e mit den benachbarten Elementen K1e , K2
e sowie ωe = K1e ∪K2
e ∪ e.
0
0.5
1 0 0.2 0.4 0.6 0.8 1
−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
00.5
1−1−0.8−0.6−0.4−0.200.20.40.60.81
−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
Abbildung 4.3: Links: N4 auf K. Rechts: ϕe.
2. Die Trager suppϕ fur die Basisfunktionen ϕ ∈ B sollten klein sein. Dies fuhrt namlich auf schwachbesetzte Steifigkeitsmatrizen
3. Aus implementierungstechnischen Grunden ist es oft am einfachsten, die Basisfunktionen mit geo-metrischen Objekten (Knoten, Elemente, etc.) zu verknupfen.
Wie wir fur die Falle p = 2 und p = 3 exemplarisch vorfuhren, werden die Basen der Raume Sp,1(T ) nachdiesen Kriterien erzeugt. Man geht sogar noch einen Schritt weiter: Man definiert die Basisfunktionenexplizit auf dem Referenzelement K und nur implizit auf den Elementen K. Wir fuhren das Vorgehenfur die Falle p = 2 und p = 3 exemplarisch vor.
Der Fall p = 2
Wir betrachten zuerst den Fall p = 2.Idee: Die Basis B als Vereingung von Hutfunktionen Blin und “Kantenformfunktionen” darstellen.
Die Kantenformfunktionen ϕe haben Trager ωe (vgl. Fig. 4.2). Auf der Kante e ist ϕe eine quadratischeFunktion — vgl. Fig. 4.3
In der Ingenieurliteratur werden die Elementfunktionfunktionen Ni nur als Diagramm darstellt, indem jeder Punkt eine Elementformfunktion darstellt. Fur p = 2 ergibt sich z.B. folgendes Bild:
35

5
3
6
41 2
N1, N2, N3 wie in (4.13),
N4(ξ, η) := ξ(1 − ξ − η)N5(ξ, η) := ξη
N6(ξ, η) := η(1 − ξ − η)
Wir beobachten, daß die Formfunktionen N4, . . . , N6 so gewahlt wurden, daß sie auf genau zwei Kantenvon K verschwinden. Wir konnen deshalb jede dieser drei Formfunktionen mit einer Kante assoziieren.Die Basis B von S2,1(T ) hat damit die Form
B = Blin ∪ (∪e∈EBe) ;
hier ist Blin wieder die Menge der Hutfunktionen, die wir uns mit den Knoten verbunden denken (“Kno-tenformfunktionen”). Die Menge E bezeichnet die Kanten der Triangulierung; die (einelementigen) Men-gen Be = {ϕe}, e ∈ E bezeichnet die “Kantenformfunktionen”. Diese sind durch folgende Bedingungenfestgelegt:
ϕe ∈ H1(Ω), suppϕe ⊂ ωe, ϕe|K ◦ FK ∈ {N4, N5, N6} ∀K ∈ Te, (4.20)
wobei Te := {K ∈ T | e ist Kante von K} und ωe :=(∪K∈TeK
)◦(vgl. Fig. 4.2).
Bemerkung 4.23 Eingeschrankt auf die Kanten von K sind die Funktionen Ni (i ∈ {4, 5, 6}) symme-trisch bezgl. des Kantenmittelpunktes sind. Dies erlaubt es uns, die Kantenformfunktionen unabhangigvon der Orientierung der Elemente aus Te explizit so zu definieren: Sei e ∈ E mit zwei angrenzen-den Elementen K1
e , K2e . Seien Γ4 = {(x, 0) |x ∈ (0, 1)}, Γ5 = {(x, y) |x ∈ (0, 1) 1 − x − y = 0},
Γ6 = {(0, y) | y ∈ (0, 1)} die drei Kanten des Referenzelementes K. Seien i, j ∈ {4, 5, 6} die zu e
gehorenden “Kantennummern” auf dem Referenzelement K, d.h., FK1e(Γi) = e und FK2
e(Γj) = e. Dann
definieren wir die Kantenformfunktion ϕe als
ϕe(x) :=
⎧⎪⎨⎪⎩Ni ◦ F−1
K1e(x) x ∈ K1
e
Nj ◦ F−1K2
e(x) x ∈ K2
e
0 sonst
Aufgrund des Symmetrie bzgl. der Kantenmittelpunkte der Funktionen Ni, i ∈ {4, 5, 6} uberlegt mansich leicht, daß die Funktion ϕe tatsachlich wohldefiniert ist2 und stetig auf Ω. �
Der Fall p = 3
Der Fall p = 3 wird ahnlich behandelt. Als Novum gegenuber dem Fall p = 2 wird nun die Orientierungder Kanten eine Rolle spielen.
Idee: schreibe die Basis B als Vereinigung der Hutfunktionen (Blin), der “Blasenformfunktionen”BK (dies sind Funktionen, deren Trager ein einzelnes Element ist), sowie von Kantenformfunktionen Be,deren Trager die Vereingung der an der Kante e angrenzenden Elemente ist und die, eingeschrankt aufdie Kante e, kubische Funktionen sind.
Auf dem Referenzelement werden die 10 = dimP3 Formfunktionen Ni, i = 1, . . . , 10 wie folgt gewahlt:2so, wie sie definiert ist, ist sie namlich auf e zweifach definiert!
36

1 2
3
5
78
9
4
10
6
• Die Funktionen fur die Ecken sind die ublichen N1, N2, N3: sie ver-schwinden auf der gegenuberliegenden Kante.
• Die Funktion N10(ξ, η) := ηξ(1 − η − ξ) gehort zum Inneren desElements. Wir beobachten, daß N10|∂ bK = 0.
• Die Funktionen N4, N5 gehoren zur Kanten Γ1 = {(x, 0) |x ∈(0, 1)}. Sie werden so gewahlt, daß N4|Γ2∪Γ3 = 0 und N5|Γ2∪Γ3 =0, wobei Γ2, Γ3 die verbleibenden zwei Kanten von Γ sind. Einetypische Wahl von N4 und N5 ware
N4(ξ, η) = ξ(1−ξ−η), N5(ξ, η) = ξ(1−ξ−η)(ξ−1/2). (4.21)
• Die Formfunktionen N6, N7 sowie die Formfunktionen N8, N9 sindanalog zu den Funktionen N4, N5 durch geeignete Koordinaten-transformation definiert. Auch diese verschwinden auf zwei Kantenvon K.
Die Basis B des S3,1(T ) hat dann die Form B = Blin ∪ (∪e∈EBe) ∪ (∪K∈T BK); hier besteht Blin wiederaus den Hutfunktionen (mit den Knoten assoziiert) und die Mengen BK = {ϕK} sind einelementigeMengen, die mit den Elementen assoziiert sind. Sie sind definiert durch
ϕK(x) =
{N10 ◦ F−1
K (x) x ∈ K,
0 sonst.
Wir bemerken, daß die Tatsache, daß N10|∂ bK = 0 impliziert, daß die Funktionen ϕK ∈ H10 (Ω). Die
Kantenmengen Be = {ϕe,1, ϕe,2}. Die Die Funktionen ϕe,1, ϕe,2 erfullen wieder die Bedingungen
ϕe,i ∈ H1(Ω), suppϕe,i ⊂ ωe, ∀K ∈ Te.
Betrachten wir nun die Wahl aus (4.21). Die Funktion N4 (und analog N6, N8) stimmt mit der Kanten-formfunktion aus dem Fall p = 2 uberein. Wir hatten uns schon oben davon uberzeugt, wie die entspre-chende Funktion ϕe,1 aussieht. Die verbleibende Kantenformfunktion ϕe,2 muß ein kubisches Profil aufder Kante e haben und sollte wie in der mittleren Figur in Fig. 4.4 aussehen. Analog zum Fall p = 2wurden wir nun hoffen, daß ϕe,2|K ◦ FK ∈ {N5, N7, N9} fur K ∈ Te gilt. Dies ist jedoch nicht der Fall,wie man sich an der folgenden Situation einfach uberlegen kann:
Beispiel 4.24
K1
K2
FK1
FK2K K
e
A
BIm nebenstehenden Beispiel ist die Kante e Bild der KanteΓ = {(x, 0) |x ∈ (0, 1)} sowohl unter der Abbildung FK1 alsauch von FK2 . Jedoch unterscheiden sich die Orientierungen,denn FK1(0, 0) = A, FK1(1, 0) = B wahrend FK2(0, 0) = B,FK2(1, 0) = A. Definierte man nun ϕe,2 elementweise durchϕe,2|K1 = N5 ◦ FK1 und ϕe,2|K2 = N5 ◦ FK2 , so ist ϕe,2 nichtstetig (es entsteht eine Funktion wie sie in Fig. 4.4 rechtsdargestellt ist); das so definierte ϕe,2 ist also kein Elementvon H1 und damit nicht die gewunschte Funktion.
Die kubische Kantenformfunktion N5 ist jedoch in (4.21) speziell gewahlt worden: Ihre Einschrankungauf die Kante {(x, 0) |x ∈ (0, 1)} (und analog fur die Funktionen N7, N9) ist antisymmetrisch bzgl. desKantenmittelpunktes. Damit kann man sich einfach uberlegen, daß die Funktion ϕe,2 so konstruierenkann, daß wenigstens ϕe,2|K ◦ FK ∈ {±N5,±N7,±N9} erreicht wird. Die Vorzeichenwahl kann manrelativ einfach durch (willkurliches) Festlegen einer Orientierung der Kanten E bestimmen.
Beispiel 4.25 Wir betrachten wieder den Fall aus Beispiel 4.24. Wenn wir der Kante e = [A,B] eineOrientierung zuschreiben (z.B. “von A nach B”), dann sehen wir, daß die Einschrankung von FK1 auf Γorientierungserhaltend ist, wahrend die Einschrankung von FK2 auf Γ die Orientierung wechselt. Wegender Symmetrieeigenschaften von N5 konnen wir deshalb ϕe,2 durch ϕe,2|K1 = N5 ◦ FK1 und ϕe,2|K2 =
37

0
0.5
1 0 0.2 0.4 0.6 0.8 1
−0.05
−0.04
−0.03
−0.02
−0.01
0
0.01
0.02
0.03
0.04
0.05
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−1
0
1
−0.05
−0.04
−0.03
−0.02
−0.01
0
0.01
0.02
0.03
0.04
0.05
00.10.20.30.40.50.60.70.80.91
−1
0
1
−0.05
−0.04
−0.03
−0.02
−0.01
0
0.01
0.02
0.03
0.04
0.05
Abbildung 4.4: die kubischen Kantenformfunktionen. Links: auf dem Referenzelement. Mitte: ϕe,2 aufeinem ωe. Rechts: Effekt des Ignorierens der Kantenorientierung.
−N5 ◦ FK2 definieren. Dann ist ϕe,2 stetig und somit die gewunschte Kantenformfunktion (vgl. Fig. 4.4Mitte).
Ein haufig verwendetes Mittel, die Kanten E zu orientieren geht von einer global Nummerierung derKnoten aus. Man definiert dann die Orientierung von e ∈ E mit Endpunkten V1, V2 von der hoherenKnotennummer zur niedrigeren.
Bemerkung 4.26 Die Funktionen Ni auf dem Referenzelement K bilden eine Basis des Raums Pp.Ganz allgemein kann man fur jede Basis B Matrizen TK ∈ R
n×N mit n = dimPp finden, so daß sichjedes ϕi ∈ B, i = 1, . . . , N darstellen laßt als
ϕi|K ◦ FK =n∑
j=1
TKjiNj.
Mit Ausnahme des Falles p = 3 hatten die Matrizen TK extrem einfache Struktur: in jeder Zeile vonTK ist hochstens ein Eintrag 1, die restlichen sind 0. Im Fall p = 3 wurden die Funktionen Nj und dieBasisfunktionen ϕi so gewahlt, daß die Matrix TK nur Eintrage 0, 1 und −1 hat. Wir werden am Beispielvon Gittern mit hangenden Knoten sehen, daß in allgemeineren Situation die Matrizen TK komplexereGestalt haben konnen. �
4.6 Gekrummte Elemente
Normalerweise ist ∂Ω nicht stuckweise gerade, sondern gekrummt. Wenn man mit affinen Dreiecksgitternarbeiten will, muß man den Rand stuckweise linear approximieren, insbesondere bei Verwendung vonElementen hoherer Ordnung macht man damit Fehler, die zu groß sind. Man muß deshalb die Geometriebesser approximieren bzw. exakt darstellen.
Strukturell ist die Konstruktion der Ansatzraume ahnlich wie oben: es werden die Basisfunktionenauf dem Referenzelement definiert und dann geeignet assembliert. Der Unterschied ist nur, daß nun dieElementabbildungen nicht mehr affin sein muussen.
Wir fuhren das Vorgehen fur den Fall ”krummliniger“ Dreiecke vor. Hierzu sei K das Referenzdreieck.Sei T eine Menge von Elemente K und fur jedes Element K ∈ T sei eine Elementabbildung FK : K → Kgegeben. Wir nehmen folgende Eigenschaften an.
1. K ∩K ′ = ∅ fur K = K ′ und K,K ′ ∈ T ,
2. Ω =⋃
K∈T K,
3. FK ist bijektiv und in C1(K).
weiterhin verlangen wir die Eigenschaft 4 aus Definition 4.4, d.h. das Fehlen von hangenden Knoten:
4. fur K = K ′ und K ∩K ′ = ∅ gilt folgendes
38
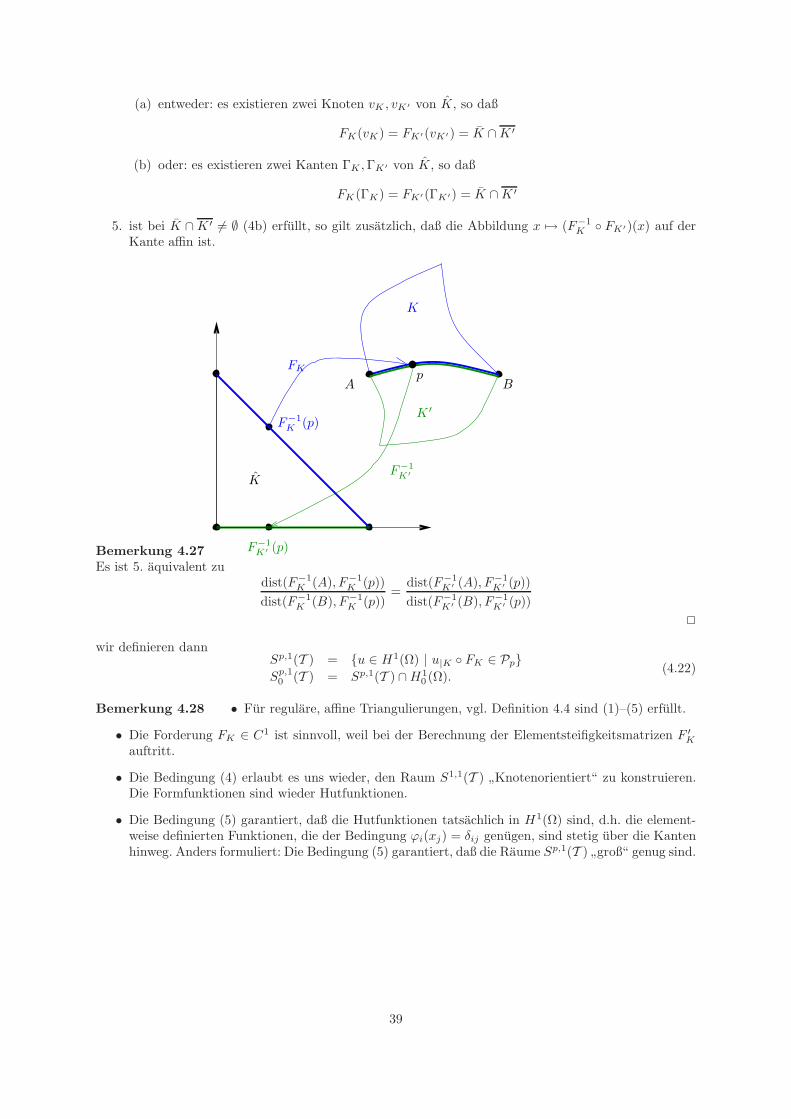
(a) entweder: es existieren zwei Knoten vK , vK′ von K, so daß
FK(vK) = FK′(vK′) = K ∩K ′
(b) oder: es existieren zwei Kanten ΓK ,ΓK′ von K, so daß
FK(ΓK) = FK′(ΓK′) = K ∩K ′
5. ist bei K ∩K ′ = ∅ (4b) erfullt, so gilt zusatzlich, daß die Abbildung x �→ (F−1K ◦ FK′)(x) auf der
Kante affin ist.
Bemerkung 4.27
K
FK
F−1K′
K ′
K
F−1K (p)
F−1K′ (p)
pA B
Es ist 5. aquivalent zudist(F−1
K (A), F−1K (p))
dist(F−1K (B), F−1
K (p))=
dist(F−1K′ (A), F−1
K′ (p))dist(F−1
K′ (B), F−1K′ (p))
�
wir definieren dannSp,1(T ) = {u ∈ H1(Ω) | u|K ◦ FK ∈ Pp}Sp,1
0 (T ) = Sp,1(T ) ∩H10 (Ω).
(4.22)
Bemerkung 4.28 • Fur regulare, affine Triangulierungen, vgl. Definition 4.4 sind (1)–(5) erfullt.
• Die Forderung FK ∈ C1 ist sinnvoll, weil bei der Berechnung der Elementsteifigkeitsmatrizen F ′K
auftritt.
• Die Bedingung (4) erlaubt es uns wieder, den Raum S1,1(T ) ”Knotenorientiert“ zu konstruieren.Die Formfunktionen sind wieder Hutfunktionen.
• Die Bedingung (5) garantiert, daß die Hutfunktionen tatsachlich in H1(Ω) sind, d.h. die element-weise definierten Funktionen, die der Bedingung ϕi(xj) = δij genugen, sind stetig uber die Kantenhinweg. Anders formuliert: Die Bedingung (5) garantiert, daß die Raume Sp,1(T ) ”groß“ genug sind.
39

Betrachte zum Beispiel zwei ElementeK1,K2 mit
ξ
η
K1
K2
FK1(ξ, η) := (sin(π/2ξ), η)
A
B
x
y
Die Bedingung 5. ist hier verletzt. Fur u ∈ S1,1(T ) ist
1. u|y=0 von K2 her kommend ein Polynom in x.
2. u|y=0 von K1 her kommend ein Polynom in arcsin(x).
Wegen der Stetigkeit von u muß dann u|y=0 = const, d.h. die Freiheitsgrade, die mit A und Bassoziiert sind, sind nicht unabhangg von einander. Man kann auf diese Weise Gitter erzeugen, diezwar viele Elemente haben, aber Dimension sehr klein ist.
�
Triangulierungen mit den Elementabbildungen, die die Bedingungen (1)–(5) erfullen, konnen dannassembliert werden wie im Fall von gewohnlichen Dreiecken, vgl. Algorithmus 4.9.
Der wichtigste Fall von gekrummten Elementen sind die Elementabbildungen FK , bei denen jedeKomponente (FK)i ∈ Pq fur ein q ≥ 1 ist. Man spricht von
1. subparametrischen Elementen, falls q < p,
2. isoparametrischen Elementen, falls q = p,
3. superparametrische Elemente, falls q > p.
Meist werden isoparametrische Elemente verwendet.
4.7 Hangende Knoten
4.26 Es werden manchmal, z.B. im Kontext adaptiv verfeinerter Gitter, Gitter betrachtet, die irregulareKnoten enthalten:
1
2
3
4
5
K1 K2
Trotzdem kann man den Raum
Sp,1(T ) = {u ∈ H1(Ω) | u|K ◦ FK ∈ Pp fur alle K ∈ T }
definieren. Die Fragestellung bei hangenden Knoten ist, wie aus denElementformfunktionen globale Basisfunktionen des Sp,1(T ) zu erzeu-gen sind. Wir beschranken uns hier auf den Fall p = 1 und den Fallsog. 1-irregularen Knoten, d.h. jeder irregulare Knoten teilt eine Kan-ten im Verhaltnis 1 : 1 und die Eckpunkte dieser Kante sind regulareKnoten. In diesem Fall entsteht ein regulares Gitter T ′, sobald mandie irregularen Knoten mitsamt der daran hangenden Kanten eliminiert.Man kann sich relativ leicht uberlegen, daß nur die Funktionswerte inregularen Knoten echte Freiheitsgrade darstellen: sobald die Funktions-werte eines u ∈ S1,1(T ) in den regularen Knoten bekannt ist, dann sindauch die Funktionswerte in den hangenden Knoten bekannt und damitauf ganz Ω. Die Basis B von S1,1(T ), die wir konstruieren, wird deshalbwieder aus den Hutfunktionen des Gitters T ′ bestehen. Die “Schwie-rigkeit” des Assemblierens ist, daß die Elementsteifigkeitsmatrizen (und-lastvektoren) uber das Gitter T definiert sind.
40

Im Fall regularer Triangulierungen hatten wir bereits die Matrizen TK in Bemerkung 4.26 eingefuhrt.Fur den Fall p = 1 und regulare Gitter hatten wir festgestellt, daß sich jede Basisfunktion darstellen laßtin der Form
ϕi|K ◦ FK =3∑
j=1
TKjiNj ,
wobei die Eintrage von TK nur 0 oder 1 sind. Im Fall von irregularen Knoten kann man ahnlich vorge-hen. Seien ϕi, i = 1, . . . , N , die Hutfunktionen, die zu der regularen Triangulierung T ′ gehoren. Dannbestimmen wir fur jedes K ∈ T die Matrix TK ∈ R
3×N so, daß
ϕi|K ◦ FK =3∑
j=1
TKjiNj . (4.23)
Aus dieser Darstellung laßt sich dann aus den Elementsteifigkeitsmatrizen und den Elementlastvektorendie globale Steifigkeitsmatrix und der global Lastvektor assemblieren. Es bleibt somit, die Matrizen TK
zu bestimmen, was im vorliegenden Fall 1-irregularer Knoten nicht allzu schwer ist:
Bemerkung 4.29 Die Matrizen TK sind relativ einfach zu bestimmen—wir fuhren das Vorgehen amBeispiel der Figur unten vor.
• falls das Element K ∈ T auch in T ′ ist, dann sind alle drei Ecken regular und alle Eintrage vonTK sind Null mit Ausnahme von TK
ij , wobei i, j derart sind, daß ϕi|K ◦ FK = Nj .
• falls K, K ′ Elemente sind, die sich einen hangenden Knoten x teilen, geht man wie folgt vor.
xi3
xi1x
K
xi2
K ′
seien xi1 , xi2 , xi3 regulare Knoten in T ′ und die Elementabbildung FK ,FK′ so, daß
FK(v1) = xi1 , FK(v2) = xi3 , FK(v3) = x,
FK′(v1) = xi3 , FK′(v2) = xi2 , FK′(v3) = x,
dann gilt auf K und auf K ′
ϕi1 |K ◦ FK = N1 +12N3, ϕi3 |K ◦ FK = N2, ϕi2 |K ◦ FK =
12N3
ϕi1 |K′ ◦ FK′ =12N3, ϕi3 |K′ ◦ FK′ = N1, ϕi2 |K′ ◦ FK′ = N2 +
12N3
Daraus ergeben sich die Matrizen TK , TK′als:
TKji =
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
1, fur j = 1 und i = i11, fur j = 2 und i = i312 , fur j = 3 und i = i112 , fur j = 3 und i = i20, sonst
TK′ji =
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
1, fur j = 1 und i = i31, fur j = 2 und i = i212 , fur j = 3 und i = i112 , fur j = 3 und i = i20, sonst
�
41

1
3
2
K K
A1A2
A3
Γ12
Γ23Γ13
Γ12
Γ23Γ13
Abbildung 4.5: blending element Technik fur krummlinige Elemente
4.7 Hangende Knoten
4.26 Es werden manchmal, z.B. im Kontext adaptiv verfeinerter Gitter, Gitter betrachtet, die irregulareKnoten enthalten:
1
2
3
4
5
K1 K2
Trotzdem kann man den Raum
Sp,1(T ) = {u ∈ H1(Ω) | u|K ◦ FK ∈ Pp fur alle K ∈ T }
definieren. Die Fragestellung bei hangenden Knoten ist, wie aus denElementformfunktionen globale Basisfunktionen des Sp,1(T ) zu erzeu-gen sind. Wir beschranken uns hier auf den Fall p = 1 und den Fallsog. 1-irregularen Knoten, d.h. jeder irregulare Knoten teilt eine Kan-ten im Verhaltnis 1 : 1 und die Eckpunkte dieser Kante sind regulareKnoten. In diesem Fall entsteht ein regulares Gitter T ′, sobald mandie irregularen Knoten mitsamt der daran hangenden Kanten eliminiert.Man kann sich relativ leicht uberlegen, daß nur die Funktionswerte inregularen Knoten echte Freiheitsgrade darstellen: sobald die Funktions-werte eines u ∈ S1,1(T ) in den regularen Knoten bekannt ist, dann sindauch die Funktionswerte in den hangenden Knoten bekannt und damitauf ganz Ω. Die Basis B von S1,1(T ), die wir konstruieren, wird deshalbwieder aus den Hutfunktionen des Gitters T ′ bestehen. Die “Schwie-rigkeit” des Assemblierens ist, daß die Elementsteifigkeitsmatrizen (und-lastvektoren) uber das Gitter T definiert sind.
Im Fall regularer Triangulierungen hatten wir bereits die Matrizen TK in Bemerkung 4.26 eingefuhrt.Fur den Fall p = 1 und regulare Gitter hatten wir festgestellt, daß sich jede Basisfunktion darstellen laßtin der Form
ϕi|K ◦ FK =3∑
j=1
TKjiNj ,
wobei die Eintrage von TK nur 0 oder 1 sind. Im Fall von irregularen Knoten kann man ahnlich vorge-hen. Seien ϕi, i = 1, . . . , N , die Hutfunktionen, die zu der regularen Triangulierung T ′ gehoren. Dannbestimmen wir fur jedes K ∈ T die Matrix TK ∈ R
3×N so, daß
ϕi|K ◦ FK =3∑
j=1
TKjiNj . (4.23)
Aus dieser Darstellung laßt sich dann aus den Elementsteifigkeitsmatrizen und den Elementlastvektorendie globale Steifigkeitsmatrix und der global Lastvektor assemblieren. Es bleibt somit, die Matrizen TK
zu bestimmen, was im vorliegenden Fall 1-irregularer Knoten nicht allzu schwer ist:
Bemerkung 4.30 Die Matrizen TK sind relativ einfach zu bestimmen—wir fuhren das Vorgehen amBeispiel der Figur unten vor.
• falls das Element K ∈ T auch in T ′ ist, dann sind alle drei Ecken regular und alle Eintrage vonTK sind Null mit Ausnahme von TK
ij , wobei i, j derart sind, daß ϕi|K ◦ FK = Nj .
41

• falls K, K ′ Elemente sind, die sich einen hangenden Knoten x teilen, geht man wie folgt vor.
xi3
xi1x
K
xi2
K ′
seien xi1 , xi2 , xi3 regulare Knoten in T ′ und die Elementabbildung FK ,FK′ so, daß
FK(v1) = xi1 , FK(v2) = xi3 , FK(v3) = x,
FK′(v1) = xi3 , FK′(v2) = xi2 , FK′(v3) = x,
dann gilt auf K und auf K ′
ϕi1 |K ◦ FK = N1 +12N3, ϕi3 |K ◦ FK = N2, ϕi2 |K ◦ FK =
12N3
ϕi1 |K′ ◦ FK′ =12N3, ϕi3 |K′ ◦ FK′ = N1, ϕi2 |K′ ◦ FK′ = N2 +
12N3
Daraus ergeben sich die Matrizen TK , TK′als:
TKji =
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
1, fur j = 1 und i = i11, fur j = 2 und i = i312 , fur j = 3 und i = i112 , fur j = 3 und i = i20, sonst
TK′ji =
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
1, fur j = 1 und i = i31, fur j = 2 und i = i212 , fur j = 3 und i = i112 , fur j = 3 und i = i20, sonst
�
4.8 inhomogene Dirichlet Randbedingungen
4.8.1 Variationsformulierung
Als Modelproblem betrachten wir zu geg. f ∈ L2(Ω), g ∈ H1/2(∂Ω):
−Δu = f auf Ω, u = g auf ∂Ω. (4.24)
Als Variationsformulierung nehmen wir:
Finde u ∈ H1(Ω) s.d. B(u, v) :=∫
Ω
∇u · ∇v =∫
Ω
fv ∀v ∈ H10 (Ω), γ0u = g. (4.25)
Damit diese Randbedingung sinnvoll ist, mussen wir g ∈ H1/2(∂Ω) = γ0(H1(Ω)) fordern. Wie in 1Dlosen wir (4.25) wie folgt: sei G ∈ H1(Ω) mit γ0G = g. Dann lost u := u−G ∈ H1
0 (Ω)
Finde u ∈ H10 (Ω) s.d. B(u, v) =
∫Ω
fv −B(G, v) ∀v ∈ H10 (Ω) (4.26)
Wie im 1D-Fall uberlegt man sich, daß die Losung von (4.25), die mithilfe von (4.26) erhalten wird, nichtvon der Wahl von G abhangen (solange nur G ∈ H1(Ω) mit γ0G = g gilt). Insbesondere zeigt man dann
‖u‖H1(Ω) ≤ C[‖f‖L2(Ω) + ‖g‖H1/2(∂Ω)
].
4.8.2 abstrakte FEM
Sei VN ⊂ H1(Ω). Setze VN,0 := VN ∩H10 (Ω). Ein erster Ansatz zur Diskretisierung ware:
(i) wahle G ∈ H1(Ω) mit γ0G = g
(ii) approx. die Losung u von (4.26) durch uN ∈ VN,0, welches B(uN , v) =∫Ω fv − B(G, v) fur alle
v ∈ VN,0 erfullt.
(iii) setze uN := G+ uN
42

(i) wahle GN ∈ VN (so daß γ0GN − g “klein” ist)
(ii) bestimme uN ∈ VN,0 so, daß B(uN , v) =∫Ω fv −B(GN , v) ∀v ∈ VN,0
(iii) setze uN := GN + uN .
In der Praxis wird weiter vereinfacht, indem man die Funktion G durch ein GN ∈ VN approximiert. Diesergibt dann Algorithmus 4.8.2 Den Fehler u− uN kann man wie folgt abschatzen:
Satz 4.31 Sei Ω Lipschitzgebiet. Sei u Losung von (4.25) und uN mit Alg. 4.8.2 bestimmt. Dann gilt:
(i) |u− uN |H1(Ω) ≤ infv∈VN,0
|u− (Gn + v)|H1(Ω)
(ii) ‖u− uN‖H1(Ω) ≤ C infv∈VN,0
‖u− (Gn + v)‖H1(Ω),
wobei die Konstante C > 0 nur von Ω abhangt.
Beweis: ad (i): Aus B(u, v) =∫Ωfv fur alle v ∈ H1
0 (Ω) und B(uN , v) =∫Ωfv fur alle v ∈ VN,0 ⊂ H1
0 (Ω)folgt die Galerkinorthogonalitat B(u− uN , v) = 0 fur alle v ∈ VN,0. Damit ergibt sich
|u− uN |2H1(Ω) = B(u− uN , u− uN) = B(u − uN , u− (GN + uN)) = B(u− uN , u− (GN + v))∀v ∈ VN,0.
Aus der Cauchy-Schwarz’schen Ungleichung folgt damit die Behauptung.ad (ii): Aus den Ubungen haben wir
‖w‖H1(Ω) ≤ C[|w|H1(Ω) + ‖w‖L2(∂Ω)
]∀w ∈ H1(Ω).
Damit ergibt sich
‖u− uN‖H1(Ω) ≤ C[|u − uN |H1(Ω) + ‖u− uN‖L2(Ω)
]= C
[|u− uN |H1(Ω) + ‖u− uN − v‖L2(Ω)
]∀v ∈ VN,0.
Aus dem Spursatz (Satz 3.30) folgt weiter
‖u− uN‖H1(Ω) ≤ C
[|u− uN |H1(Ω) + inf
v∈VN,0‖u− uN − v‖H1(Ω)
]
≤ C
[|u− uN |H1(Ω) + inf
v∈VN,0‖u− (GN + v)‖H1(Ω)
].
Setzt man fur den Ausdruck |u − uN |H1(Ω) die Aussage aus Teil (i) ein, so ergibt sich die gewunschteAussage (ii). �
4.8.3 konkrete Realisierung von Dirichletrandbedingungen
Alg. 4.8.2 zeigt:
1. die Implementierung von inhomogenen Dirichletrandbedingungen ist ahnlich wie das Vorgehen beihomogenen Dirichletrandbedingungen—lediglich der Lastvektor l andert sich.
2. Man uberlegt sich (Ubung): fur GN , G′N ∈ VN mit γ0GN = γ0G
′N stimmen die mit Alg. 4.8.2
erhaltenen Losungen.
Um die Berechnung des Lastvektors moglichst einfach zu gestalten, wahlt man GN so, daß nur dieElemente K am Rand einen modifizierten Elementlastvektor haben, d.h. wir wahlen GN so, daß GN |K =0 falls K ∩ ∂Ω = ∅.
Fur eine regulare, affine, formregulare Triangulierung T wahlen wir VN = S1,1(T ). Dann ist dieklassische Wahl von GN ∈ S1,1(T ) definiert durch
GN (xi) =
{g(xi) falls Knoten xi ∈ ∂Ω0 sonst
Der vollstandige Alorithmus ist dann Alg. 2
43

Algorithm 2 inhomogene Dirichletrandbedingungen fur S1,1(T )1: N := Anzahl Knoten im Inneren von Ω2: B := 0 ∈ R
N×N , l := 0 ∈ RN
3: for K ∈ T do4: bestimme BK ∈ R
3×3, lK ∈ R3
5: bestimme DOFK und TK fur den Raum S1,10 (T )
6: if K ∩ ∂Ω �= ∅ then7: V := Ecken von K8: V∂Ω := {v ∈ V |FK(v) ∈ ∂Ω}9: bestimme GK ∈ P1 so, daß
(a) GK(v) = g(FK(v)) ∀v ∈ V∂Ω
(b) GK(v) = 0 ∀v ∈ V \ V∂Ω
10: bestimme den Koeffizientenvektor GK ∈ R3 von GK in der Basis {N1, N2, N3}
11: lK := lK − BKGK
12: end if13: for i ∈ DOFK do14: lT K(i)+ = lKi15: for j ∈ DOFK do16: BT K(i),T K(j)+ = BK
ij
17: end for18: end for19: end for20: lose Bu = l % u = Koeffizientenvektor von uN .21: gesuchte Losung uN ∈ S1,1(T ) is geg. durch uN (xi) = g(xi) fur Knoten xi ∈ ∂Ω und uN(xi) = u(xi)
fur Knoten xi ∈ Ω
44

Bemerkung 4.32 Falls man einen direkten Loser verwendet, dann kann man beim Aufstellen der Steifigkeitsmatrix unddes Lastvektors in Alg. 2 die Randbedingungen auch gleich “mitnehmen” (in Alg. 2 ist dann DOF K = {1, 2, 3} fur alleK ∈ T ). Anschließend werden Zeilen und Spalten von B, welche zu Randknoten gehoren, auf Null gesetzt mit Ausnahmedes Diagonaleintrags, welcher auf 1 gesetzt wird. Der Eintrag des Lastvektors, der zu einem Randknoten xi gehort, wirdauf g(xi) gesetzt. Der Loser liefert dann als Losungsvektor die gesuchten Knotenwerte in allen Knoten der Triangulierung.
Bemerkung 4.33 Die Wahl von GN in Alg. 2 entspricht einer stuckweise linearen Interpolation derRanddaten g. Bezeichnet man mit Iu ∈ S1,1(T ) den stuckweise linearen Interpolanten von u (fallsu ∈ C(Ω)), dann ergibt sich fur die in Alg. 2 getroffene Wahl GN die Abschatzung infv∈VN,0 ‖u− (GN +v)‖H1(Ω) ≤ ‖u − Iu‖H1(Ω) erzielen. Im folgenden Kapitel werden wir uns eingehend mit ‖u − Iu‖H1(Ω)
beschaftigen.finis 17.Stunde
4.9 Neumannproblem ohne Absolutterm
Sei Ω zusammenhangend; wir betrachten
−Δu = f auf Ω, ∂nu = h auf ∂Ω. (4.27)
Eine klassische Losung von (4.27) erfullt dann:
Finde u ∈ H1(Ω) s.d.∫
Ω
∇u · ∇v =∫
Ω
fv +∫
∂Ω
hv ∀v ∈ H1(Ω). (4.28)
Die Formulierung ist unvollstandig, weil
(i) durch die Wahl der Testfunktion v ≡ 1 sieht man, daß die Daten f , h die Kompatibilitatsbedingung∫Ω
f +∫
∂Ω
h = 0 (4.29)
erfullen mussen.
(ii) Falls (4.28) eine Losung u hat, dann ist auch u+ c fur beliebiges c ∈ R eine Losung, d.h. die Losungvon (4.28) ist nicht eindeutig.
Wir schließen, daß H1(Ω) nicht der richtige Raum ist, eine Losung von (4.27) zu suchen. Weil die Losungnur bis eine Konstante festgelegt ist, muß diese noch fixiert werden; dies geschieht durch (willkurliche)Normierung
∫Ω u = 0. Wir definieren deshalb den Raum
H1(Ω) := {u ∈ H1(Ω) |
∫Ω
u = 0} H1(Ω)/R. (4.30)
und betrachten
Finde u ∈ H1(Ω) s.d.
∫Ω
∇u · ∇v =∫
Ω
fv +∫
∂Ω
hv ∀v ∈ H1(Ω). (4.31)
Es gilt:
Satz 4.34 Sei Ω Lipschitzgebiet (also inbs. zusammenhangend). Sei f ∈ L2(Ω), h ∈ L2(∂Ω). Dann hat(4.31) eine eindeutige Losung u ∈ H
1(Ω). Zudem existiert C > 0, welches nur von Ω abhangt, so daß
‖u‖H1(Ω) ≤ C[‖f‖L2(Ω) + ‖h‖L2(∂Ω)
].
Falls f und h die Kompatibilitatsbedingung (4.29) erfullen, dann ist jede Losung u von (4.28) von derForm u = u+ c fur ein c ∈ R.
Beweis: Ubung. �
45

4.9.1 Implementierung von Neumannproblemen
Die FEM-Formulierung von (4.31) lautet mit VN := S1,1(T ) ∩H1(Ω)
Finde uN ∈ VN s.d.∫
Ω
∇uN · ∇v =∫
Ω
fv +∫
∂Ω
hv ∀v ∈ VN . (4.32)
Die Schwierigkeit bei der Implementierung von (4.32) ist, daß man keine Basis von VN kennt, derenElemente kleinen Trager haben. Man geht deshalb anders vor. Man betrachtet die Basis B = {ϕi | i =1, . . . , N} von S1,1(T ), die aus den klassischen Hutfunktionen besteht und erzwingt die Nebenbedingung∫Ω uN = 0 separat. Hierzu stellen wir zwei Zugange vor:
Ubung 4.35 Seien {ϕi | i = 1, . . . , N} die Hutfunktionen. Definiere 1 = (1, 1, . . . , 1)� ∈ RN , B ∈ R
N×N
mit Bij =∫Ω∇ϕj · ∇ϕi, sowie P ∈ R
N mit Pi =∫Ωϕi. Zeigen Sie: Falls man uN =
∑Ni=1 uiϕi schreibt,
dann ist (4.32) aquivalent mit (BP
)u =
(l0
)
Erfullt der Lastvektor l zudem die Kompatibilitatsbedingung l�1 = 0, so ist dieses Gleichungssystemaquivalent zu (
B PP� 0
) (uλ
)=
(l0
), (4.33)
wobei λ = 0.
Beispiel 4.36 In der Ingenieurpraxis wird die Sattelpunktformulierung (4.33) nicht gerne eingesetzt3 .Vielmehr umgeht man das Problem, daß die Steifigkeitsmatrix B nicht vollen Rang hat dadurch, daß dieLosung uN in zwei Schritten bestimmt wird. Zuerst wird eine Losung uN ∈ S1,1(T ) erzeugt, deren Koef-fizientenvektor u die Gleichung Bu = l erfullt. Die Losung wird so gewahlt, daß uN in einem willkurlichgewahlten Knoten verschwindet. Dies erreicht man dadurch, daß man in dem Gleichungssystem Bu = ldie zu diesem Knoten gehorige Zeile und Spalte streicht—das entstehende linearen Gleichungssystem istdann SPD. Die gesuchte Losung uN ergibt sich dann als uN = uN − c, wobei c der Mittelwert von uN
ist.
3einer von vielen Grunden: SPD-Matrizen konnen ohne Pivotsuche sehr effizient faktorisiert werden—bei Gleichungssy-stemen der Form (4.33 ist nicht ohne weiteres klar, daß LU-Faktorisierungen ohne Pivotsuche funktionieren
46

Kapitel 5
Konvergenzanalyse der FEM
5.1 Quasiuniforme Gitter
Bei zahlreichen Problemen haben wir ein Quasioptimalitatsresultat fur die FEM von der Form ‖u −uN‖H1(Ω) ≤ C infv∈VN ‖u − v‖H1(Ω). Es ist deshalb von Interesse, dieses Infimum zu quantifizieren. Inder Praxis geschieht das dadurch, daß man ein konkretes v ∈ VN wahlt, das gute Approximationseigen-schaften hat. Wir werden im folgenden Satz den stuckweise linearen Interpolanten untersuchen.
Satz 5.1 Sei T eine regulare, γ-formregulare, affine Triangulierung eines Polygons Ω ⊂ R2. Sei u ∈
C(Ω) und u|K ∈ H2(K) fur jedes K ∈ T . Sei Iu ∈ S1,1(T ) der stuckweise lineare Interpolant von u,d.h. (Iu)(xi) = u(xi) fur alle Knoten xi. Dann existiert ein C > 0, welches nur von γ abhangt, so daß
‖u− Iu‖L2(K) ≤ Ch2K |u|H2(K) ∀K ∈ T
|u− Iu|H1(K) ≤ ChK |u|H2(K) ∀K ∈ T .
Insbesondere ist Iu ∈ S1,10 (T ) falls u ∈ C(Ω) ∩H1
0 (Ω).
Beweis: Die Beweistechnik, die wir hier vorstellen ist fundamental in der FEM und lauft in der Literaturoft unter dem Namen “Bramble-Hilbert-Lemma” oder ”Skalierungsargument”.1. Schritt: Wir zeigen: setzt man fur eine Funktion v, die auf K definiert ist, v := v ◦ FK , so gilt
|v|Hk( bK) ≤ Ckhk−1K |v|Hk(K) (5.1)
|v|Hk(K) ≤ Ckh−(k−1)K |v|Hk( bK); (5.2)
die Konstante Ck hangt von k ∈ N0 und von der Formregularitatskonstante γ ab.Um (5.1), (5.2) zu zeigen, uberlegt man sich zuerst die Existenz von C > 0, welches nur von γ
abhangt, so daß‖F ′
K‖2 ≤ ChK , ‖(F ′K)−1‖2 ≤ Ch−1
K , ∀K ∈ T . (5.3)
Mit diesen Abschatzungen lassen sich (5.1), (5.2) wie folgt beweisen: Fur k = 0 drucken (5.1), (5.2)einfach nur die Substitionsregel aus. Fur k = 1 ergibt die Kettenregel (∇v)� = ((∇v)� ◦ FK) · F ′
K unddamit mit der Substitutionsregel
‖∇v‖L2( bK) ≤ ‖F ′K‖2‖(∇v)� ◦ FK‖L2( bK) ≤ ChKh
−1K ‖∇v‖L2(K).
Fur k = 2 nutzt man wesentlich aus, daß F ′K eine konstante Matrix ist. Schreibt man FK = (F1, F2)�,
so ist F ′K die konstante Matrix (F ′
K)ij = Fi,j = ∂jFi; aufgrund von (5.3) konnen wir die Eintrage durch|Fi,j | ≤ ChK abschatzen. Also ist mit der Kettenregel
∂α1∂α2 v = ∂α1
2∑k1=1
((∂k1v) ◦ FK)∂Fk1
∂xα2
=2∑
k1=1
Fk1,α2∂α1(∂k1v ◦ FK)
=2∑
k1=1
2∑k2=1
Fk1,α2((∂k1∂k2v) ◦ FK)∂Fk2
∂xα2
=2∑
k1=1
2∑k2=1
Fk1,α2Fk2,α1(∂k1∂k2v) ◦ FK
47

woraus sich aus der Substitutionsregel dann die Behauptung (5.1) ergibt.
2. Schritt: Sei I : C(K) → P1 der Interpolationsoperator, der in den drei Eckpunkten von K interpoliert.Wir beobachten, daß K : C(K) → P1 ein stetiger linearer Operator ist mit ‖Iu‖
C( bK)≤ ‖u‖
C( bK), der
zudem Polynome vom Grad 1 reproduziert:
Iπ = π ∀π ∈ P1. (5.4)
Nach dem 1. Schritt ergibt sich nun
‖u− Iu‖L2(K) ≤ ChK‖u− Iu‖L2( bK) = ChK‖u− I u‖L2( bK) = ChK‖u− π − I(u− π)‖L2( bK) ∀π ∈ P1.
Nun nutzen wir den Sobolev’schen Einbettungssatz H2(K) ⊂ C(K) aus, d.h. ‖w‖C( bK)
≤ C‖w‖H2( bK) fur
alle w ∈ H2(K), um weiter schließen zu konnen:
‖u− Iu‖L2(K) ≤ ChK infπ∈P1
‖u− π − I(u − π)‖L2( bK) ≤ ChK infπ∈P1
(‖u− π‖
C( bK)+ ‖I(u− π)‖
C( bK)︸ ︷︷ ︸≤‖bu−π‖
C(cK)
)
≤ ChK infπ∈P1
‖u− π‖C( bK)
≤ ChK infπ∈P1
‖u− π‖H2( bK)
Das Lemma von Deny-Lions (Satz 3.29) erlaubt uns nun, die volle H2-Norm durch die H2-Seminorm zuersetzen, und wir erhalten
‖u− Iu‖L2(K) ≤ ChK |u|H2( bK) ≤ ChKhK |u|H2(K);
im letzten Schritt wurde dabei (5.2) fur k = 2 verwendet. Damit erhalten wir die gewunschte Aussagefur ‖u− Iu‖L2(K).
Fur ‖∇(u− Iu)‖L2(K) gehen wir analog vor.
‖∇(u− Iu)‖L2(K)
1. Schritt≤ C|u − I u|H1( bK) ≤ C inf
π∈P1|u− π − I(u− π)|H1( bK)
≤ C infπ∈P1
(‖u− π‖H1( bK) + ‖I(u− π)‖H1( bK)
).
Weil I(u − π) ∈ P1 und auf dem endlich-dimensionalen Raum P1 alle Normen aquivalent sind, gibt eseine Konstante C > 0, so daß
‖I(u − π)‖H1( bK) ≤ C‖I(u − π)‖C( bK)
≤ C‖u− π‖C( bK)
≤ C‖u− π‖H2( bK).
Damit erhalten wir wieder mit dem Lemma von Deny-Lions (Satz 3.29)
‖∇(u− Iu)‖L2(K) ≤ C infπ∈P1
‖u− π‖H2( bK) ≤ C|u|H2( bK) ≤ Chk|u|H2(K),
was den Beweis abschließt. �
Korollar 5.2 Sei Ω ⊂ R2 ein Polygon, T eine regulare, γ-formregulare, affine Triangulierung von Ω.
Dann existiert ein C > 0, welches nur von γ abhangt, so daß fur u ∈ H2(Ω) gilt
‖u− Iu‖L2(Ω) ≤ Ch2|u|H2(Ω),
|u− Iu|H1(Ω) ≤ Ch|u|H2(Ω),
wobei h := maxK∈T hK.
Beweis: Man summiere die elementweisen Abschatzungen aus Satz 5.1. �
Interessant ist auch die Frage, wie sich hohere Regularitat der zu approximierenden Funktion u oderVerwendung eines hoheren Polynomgrades auswirken:
48
Satz 5.3 Sei T regulare, γ-formregulare, affine Triangulierung eines Polygons Ω. Sei k > 1. Dannexistiert C > 0 (welches nur von γ und k abhangt), so daß folgendes gilt: Fur jedes u ∈ Hk(Ω) existiertein v ∈ Sp,1(T ) derart, daß
‖u− v‖L2(Ω) ≤ C
(h
p
)min{k,p+1}|u|Hk(Ω),
‖∇(u− v)‖L2(Ω) ≤ C
(h
p
)min{k,p+1}−1
|u|Hk(Ω),
wobei h = maxK∈T hK . Falls u ∈ Hk(Ω) ∩H10 (Ω), so kann v ∈ Sp,1(T ) ∩H1
0 (Ω) gewahlt werden.
Beweis: Die etwas einfacheren Abschatzungen
‖u− v‖L2(Ω) ≤ Ck,γ,phmin{k,p+1}|u|Hk(Ω), ‖∇(u− v)‖L2(Ω) ≤ Ck,γ,ph
min{k,p+1}−1|u|Hk(Ω),
bei denen die p-Abhangigkeit nicht explizit ist, ergeben sich analog zum Vorgehen in Satz 5.1 (Ubung).Die explizite p-Abhangigkeit folgt aus feineren Untersuchungen uber Approximationseigenschaften vonPolynomen und kann z.B. in [2] gefunden werden. �
Bemerkung 5.4 1. Satz 5.3 zeigt sogar, daß fur festes Gitter T und p → ∞ gilt: infv∈Sp,1(T ) ‖u −v‖H1(Ω) → 0. Dies impliziert die Konvergenz der sog. p-FEM.
2. Wahl von p: Falls p fest gewahlt wird, d.h. eine h-FEM gemacht wird, dann sollte p ∈ N so gewahltwerden, daß die Bedingung p + 1 ≥ k erfullt ist. Dies liefert namlich die maximal erreichbareKonvergenzrate.
Ubung 5.5 Bestimmen Sie die Konvergenzrate der h-FEM auf quasi-uniformen Gittern fur festes p undk in Abhangigkeit von der Problemgroße N . Uberzeugen Sie sich davon, daß—falls man N als (zuge-gebenermaßen grobes) Maß fur die Kosten der FEM ansieht—der Einsatz von Ansatzraumen hohererOrdnung (d.h. p ≥ k − 1) effizienter ist als der Einsatz von S1,1(T ).
Um Satz 5.3 anwenden zu konnen, mussen wir Regularitatsaussagen fur die gesuchte Losung u haben,d.h. wir mussen wissen, in welchem Sobolevraum u ist.
5.2 Regularitatsaussagen fur das elliptische Modellproblem
5.2.1 1D
Satz 5.6 Sei u ∈ H1(Ω) schwache Losung von −u′′ + c(x)u = f auf einem Intervall Ω ⊂ R. Seic ∈ C∞(R) und f ∈ Hk(Ω) fur ein k ≥ 0. Dann gilt: u ∈ Hk+2(Ω) und es existiert C > 0, welches vonΩ, c, k abhangt, so daß
‖u‖Hk+2(Ω) ≤ C[‖f‖Hk(Ω) + ‖u‖H1(Ω)
].
Beweis: Wir zeigen nur den Fall k = 0—der Rest geht mit Induktion. Um u ∈ H2(Ω) zu zeigen, mussenwir zeigen, daß die zweite schwache Ableitung der Losung u ∈ H1(Ω) existiert und in L2(Ω) ist. DerKandidat ist v := −f + cu, welcher offensichtlich in L2(Ω) ist. Fur ϕ ∈ C∞
0 (Ω) berechnen wir unterBerucksichtigung der Tatsache, daß u eine schwache Losung ist∫
Ω
vϕDef.=
∫Ω
(−f + cu)ϕ = −∫
Ω
u′ϕ′ u∈H1
=∫
Ω
uϕ′′
Also ist v die zweite schwache Ableitung von u. Die Abschatzung fur ‖u‖H2(Ω) ergibt sich aus
|u|H2(Ω) = ‖ − f + cu‖L2(Ω) ≤ ‖f‖L2(Ω) + ‖c‖L∞‖u‖L2(Ω).
�
49

Bemerkung 5.7 Analoge Aussagen ergeben sich sich fur Gleichungen der Form −u′′ + bu′ + cu = f .
Satz 5.6 ist ein Beispiel eine Shift-Theorems: f ∈ Hk(Ω) =⇒ u ∈ Hk+2(Ω). Notwendig ist jedoch diehinreichende Differenzierbarkeit des Koeffizienten x �→ c(x).
5.2.2 2D glatte Rander oder konvexe Gebiete
Fur das Modellproblem−Δu = f auf Ω, u|∂Ω = 0 (5.5)
gilt:
• Falls ∂Ω glatt berandet ist, dann gilt wieder das Shifttheorem f ∈ Hk(Ω) =⇒ u ∈ Hk+2(Ω)zusammen mit der a priori Abschatzung ‖u‖Hk+2(Ω) ≤ CΩ,k‖f‖Hk(Ω), wobei CΩ,k nur von Ω undk abhangt.
• Falls Ω ist konvex ist, so gilt f ∈ L2(Ω) =⇒ u ∈ H2(Ω) zusammen mit ‖u‖H2(Ω) ≤ C‖f‖L2(Ω) fureine Konstante C > 0, die nur von Ω abhangt.
Wesentlich fur diese beiden Aussagen ist jedoch die Glattheit von ∂Ω bzw. die Konvexitat von Ω wie dasfolgende Beispiel zeigt.
Beispiel 5.8 Sei ω ∈ (0, 2π) mit π/ω �∈ N und definiere den Sektor SR(ω) := {(r cosϕ, r sinϕ) | 0 < r <R, 0 < ϕ < ω}. Sei χ ∈ C∞
0 (R2) mit suppχ ⊂ BR/2(0) und χ|BR/4(0) ≡ 1. Definiere die Funktion u0 inPolarkoordinaten durch u0(r, ϕ) := rπ/ω sin(π/ωϕ) (d.h. u0 = Imzπ/ω) und definiere u durch u := u0χsowie f := −Δu. Dann gilt (Ubung):
(i) u|∂SR(ω) = 0
(ii) u ∈ H10 (SR(ω))
(iii) f ∈ C∞(SR(ω)) und f ≡ 0 auf BR/4(0)
(iv) u �∈ Hk(SR(ω)) falls k > π/ω + 1
Dieses Beispiel zeigt, daß in Gebieten mit Ecken ein Shift-theorem nicht uneingeschrankt gelten kann:Obwohl die Koeffizienten der Differentialgleichung und die rechte Seite C∞ sind, außert sich die man-gelnden Differenzierbarkeitseigenschaften der Geometrie dahingehend, daß die Losung nicht in Sobole-vraumen beliebiger Ordnung ist. Wir werden unten ein modifiziertes Shift-theorem kennenlernen, dasdiese Problematik angemessen widerspiegelt.
5.2.3 Regularitatsaussagen in Polygonen
Wie wir in Beispiel 5.8 gesehen haben, gilt das Shift-theorem nicht uneingeschrankt in Polygongebietenaufgrund der Nichtglattheit der Geometrie. Es gilt jedoch ein modifiziertes Shift-theorem, bei dem furf ∈ Hk(Ω) die Losung u als Summe von endlich vielen Singularitatenfunktionen und einer Funktionu ∈ Hk+2(Ω) geschrieben wird.
Sei Ω ⊂ R2 ein Polygon mit Ecken Aj , j = 1, . . . , J und Innenwinkeln ωj ∈ (0, 2π). Fur jede
Ecke Aj fuhren wir lokale Polarkoordinaten (rj , ϕj) ein. Weiter benotigen wir fur jede Ecke Aj eineAbschneidefunktion χj ∈ C∞
0 (R2) mit
(i) χj ≡ 1 in einer Umgebung von Aj
(ii) Am �∈ suppχj fur j �= m.
Wir definieren fur jede Ecke Aj und jedes k ∈ N die Singularitatenfunktion
Sjk(r, ϕ) :=
⎧⎨⎩rπ/ωjk sin( π
ωjkϕ) falls π
ωjk �∈ N
rπ/ωjk[ln r sin( π
ωjkϕ) + ϕ cos( π
ωjkϕ)
]falls π
ωjk ∈ N
(5.6)
Damit gilt fur die Losung u von (5.5) folgendes:
50

Satz 5.9 Sei Ω ⊂ R2 Polygongebiet, s ≥ 1. Sei π
ωjs �∈ N fur alle j ∈ {1, . . . , J}. Dann laßt sich die
variationelle Losung u ∈ H10 (Ω) von (5.5) mit f ∈ H−1+s(Ω) darstellen als
u = u+J∑
j=1
χj
∑k∈N
k πωj
<s
ajkSjk(rj , ϕj),
wobei u ∈ Hs+1(Ω) und die ajk ∈ R. Zudem existiert ein C > 0, welches nur von Ω und s abhangt, sodaß
‖u‖Hs+1(Ω) +J∑
j=1
∑k: π
ωjk<s
|aij | ≤ C‖f‖H−1+s(Ω).
Bemerkung 5.10 1. die Singularitatenfunktionen Sjk erfullen −ΔSjk = 0 und die Randbedingun-gen bei Aj .
2. fur s = 1 tragen in der Summe nur die Ecken Aj bei, fur die ωj > π gilt (die sog. “einspringendenEcken”). Sie tragen genau einen Term bei. Fur s = 1 ist insbesondere die Losung u in H2 in derNahe der konvexen Ecken Aj mit ωj < π.
3. Resultate analog zu Satz 5.9 existieren auch fur andere Differentialgleichungen und andere Rand-bedingungen.
Eine etwas andere Beschreibung der Regularitat ergibt sich aus der Verwendung gewichteter Sobole-vraume.
Lemma 5.11 Die Funktionen Sjk aus (5.6) erfullen:
(i) ∀δ > 0 ∀k ∈ N0 ∀j ∀s ≥ 0 : ‖Sjk‖Hs(Ω\Bδ(Aj)) <∞
(ii) falls πωjk > s, dann ist Sjk ∈ Hs+1(Ω)
(iii) falls πωj< 1, dann ist Sjk �∈ H2(Ω) aber ‖Sjk‖H1(Ω) <∞ sowie
‖rβj
j DαSjk‖L2(Ω) <∞, |α| = 2, βj > 1 − πωj
beliebig;
hier ist wieder rj = dist(x,Aj).
Beweis: Nachrechnen. �
Aus der Kombination von Satz 5.9 und Lemma 5.11 ergibt sich, daß die Losung u von (5.5) in einemgewichteten Sobolevraum ist. Der Einfachheit halben beschranken wir uns auf den Fall s = 1, d.h.f ∈ L2(Ω):
Korollar 5.12 Sei Ω ⊂ R2 ein Polygon. Sei f ∈ L2(Ω). Fur jede Ecke Aj, j = 1, . . . , J , wahle1
βj ∈ [0, 1) so, daß βj > 1 − πωj
. Dann gilt fur die variationelle Losung u ∈ H10 (Ω) von (5.5):
(i) Fur jedes δ > 0 erfullt fur Ω′ := Ω \ (∪Jj=1Bδ(Aj)) die Funktion u die Abschatzung ‖u‖H2(Ω′) ≤
Cδ‖f‖H2(Ω).
(ii) Fur 0 < δ < minj,m:j �=m dist(Aj ,Am) erfullt auf Bδ(Aj) ∩ Ω die Losung u fur jedes α ∈ N20 mit
|α| = 2 die Abschatzung ‖rβj
j Dαu‖L2(Bδ(Aj)∩Ω) ≤ Cδ‖f‖L2(Ω).
1fur ωj < π wird man immer βj = 0 wahlen
51

5.3 Approximation auf angepaßten Gittern
Quasi-uniform Gitter sind regulare, γ-formregulare, affine Gitter mit hK ∼ h fur alle Elemente K ∈ T .Bei dem Modellproblem (5.5) konnen wir im Fall von Polygonen, die einspringende Ecken haben, nichterwarten, daß u ∈ H2(Ω). Damit ist Korollar 5.2 nicht anwendbar, und wir konnen nichtO(h)-Konvergenzerwarten. In der Tat:
Lemma 5.13 Sei u = rα sinαϕ fur ein 0 < α < 1. Sei Ω ⊂ R2 ein Polygon mit 0 ∈ ∂Ω und T ein
quasi-uniformes Gitter auf Ω. Dann gilt: Es existieren C, C′ > 0 unabhangig von h, so daß
(i) ‖u− Iu‖H1(Ω) ≤ Chα, wobei I : C(Ω) → S1,1(T ) der stuckweise lineare Interpolant ist
(ii) infv∈S1,1(T ) ‖u− v‖H1(Ω) ≥ C′hα.
Beweis: Ubung. (siehe Appendix) �
Der Beweis des Lemmas (siehe auch das Vorgehen in Beispiel 5.14 unten) zeigt, daß die verschlechterteKonvergenzordnung an den Elementen an der Singularitat liegt. Es liegt deshalb nahe, die Elemente dortklein zu wahlen. Andererseits will man den Rechnenaufwand, d.h. die Gesamtanzahl Elemente kontrollie-ren. Dies fuhrt uns darauf, die Elemente an den Ecken klein zu wahlen und dort zu verdichten, wahrendsie zum Ausgleich im Inneren des Gebietes etwas großer gewahlt werden. Wir fuhren das zunachst in 1Dvor.
Beispiel 5.14 Sei Ω = (0, 1), α ∈ (1/2, 1), u(x) = xα. Wir betrachten Gitter T = {Ki | i = 0, . . . , N−1}mit N Elementen; Ki = (xi, xi+1). Dann gilt:
(i) Sei T uniformes Gitter, d.h. xi = iN , i = 0, . . . , N . D.g.:
infv∈S1,1(T )
|u− v|H1(Ω) ≥ infv∈S1,1(T )
‖u′ − v′‖L2(K0) ≥ infa∈R
‖u′ − a‖L2(K0) ≥ Chα−1+1/2 = CN−(α−1/2).
(ii) das optimale Konvergenzverhalten O(N−1) kann nur auf nicht-uniformen Gittern erreicht werden.Hierzu definieren wir fur ein β > 1 (welches weiter unten in Abhangigkeit von α gewahlt wird)
Γ : Ω → Ω, ξ �→ ξβ , β > 1
ξi :=i
N, i = 0, . . . , N.
Das uniform Gitter, welches durch die Punkte ξi beschrieben wird, erzeugt nun mittels der FunktionΓ die Gitterpunkte xi := Γ(ξi) eines nichtuniformen Gitters. Wegen β > 1 sind die Punkte xi beix = 0 starker verdichtet. Fur die Elementgroße hi = xi+1 − xi gilt
h0 = x1 − x0 = N−β
hi = xi+1 − xi =∫ ξi+1
ξi
Γ′(ξ) dξ = β
∫ ξi+1
ξi
ξβ−1 dξ = β
∫ (i+1)/N
i/N
ξβ−1 dξ = βN−β
∫ i+1
i
ξβ−1 dξ
= βN−β(i+ 1)β−1 ≤ βN−β
(i+ 1i
)β−1
iβ−1 ≤ βN−1x(β−1)/βi sup
j∈N
(j + 1j
)β−1
︸ ︷︷ ︸≤2β−1
≤ 2β−1βN−1x1−1/βi .
We concludehi ≤ CN−1 |dist(Ki, 0)|1−1/β fur i ≥ 1.
analog sieht manN−1 |dist(Ki, 0)|1−1/β ≤ Chi fur i ≥ 1,
woraus sich
hi ∼{N−β fur i = 0N−1| dist(Ki, 0)|1−1/β fur i ≥ 1
(5.7)
52

ergibt. Auf dem so erzeugten Gitter konnen wir nun den Fehler ‖(u− Iu)′‖L2(Ω) abschatzen, wobeiI : C(Ω) → S1,1(T ) wiederum der stuckweise lineare Interpolationsoperator ist. Wir haben fur dasElement K0:
‖(u− Iu)′‖L2(K0) ≤ 2‖u′‖2L2(K0)
+ 2‖(Iu)′‖2L2(K0)
≤ Ch2(α−1)+10 + Ch
2(α−1)+10 ≤ Ch2α−1
0
= C(N−1)β(2α−1) = CN−β(2α−1).
Fur die Elemente Ki mit i ≥ 1 folgt aus Satz 5.12
‖(u− Iu)′‖2L2(Ki)
≤ Ch2i ‖u′′‖2
L2(Ki)≤ CN−2
∫ xi+1
xi
x2(1−1/β)i |u′′|2
β>1
≤ CN−2
∫ xi+1
xi
x2(1−1/β)|u′′|2 ≤ CN−2
∫ xi+1
xi
x2(1−1/β)x2(α−2) dx
Also folgtN−1∑i=1
‖(u− Iu)′‖2L2(Ki)
≤ CN−2
∫ 1
x1
x2−2/β+2α−4 dx
Fordert man nun 2 − 2/β + 2α− 4 > −1, was aquivalent ist zu
β >2
2α− 1, (5.8)
so konnen wir abschatzen
N−1∑i=1
‖(u− Iu)′‖2L2(Ki)
≤ CN−2
∫ 1
x1
x2−2/β+2α−4 dx ≤ CN−2.
Zusammenfassend ergibt sich damit fur β > max{1, 22α−1}
‖(u− Iu)′‖L2(Ω) ≤ C[N−β(2α−1)/2 +N−1
]≤ CN−1, (5.9)
d.h. die optimale Konvergenzrate.
Beispiel 5.15 Wir illustrieren das Verhalten numerisch in Fig. 5.1. Hierzu wird mittels der FEM (ba-sierend auf S1,1(T )) das Randwertproblem
−u′′ = f auf Ω = (0, 1), u(0) = u(1) = 0
betrachtet. Die exakte Losung ist als u(x) = xα(1− x) fur α = 3/4 gewahlt. Wir betrachten zwei Gitter:
1. das uniforme Gitter T uniform mit Knoten xi = iN , i = 0, . . . , N
2. das graduierte Gitter T graded mit xi = ξβi , wobei ξ = i
N , i = 0, . . . , N und β > 1α−1/2 .
Es folgt dann:
infv∈S1,1(T uniform)
‖u− v‖H1(Ω) ≤ Chα−1/2 = cN−(α−1/2)
infv∈S1,1(T graded)
‖u− v‖H1(Ω) ≤ Ch = CN−1.
Dieses Konvergenzverhalten ist in Fig. 5.1 in der Tat sichtbar.
Beispiel 5.14 zeigt folgendes:
• durch geeignte Wahl des Gitters kann ‖u− Iu‖H1(Ω) ≤ CN−1 erreicht werden. Das ist die gleiche(optimale) Konvergenzrate, die fur die Approximation von H2-Funktionen erreicht wird; entschei-dend ist die Eigenschaft (5.8) des Gitters, welche in analoger Form auch in 2D verwendet werdenkann.
2Satz 5.1 ist fur 2D formuliert—die entsprechende 1D Ausage wird jedoch vollig analog gezeigt.
53
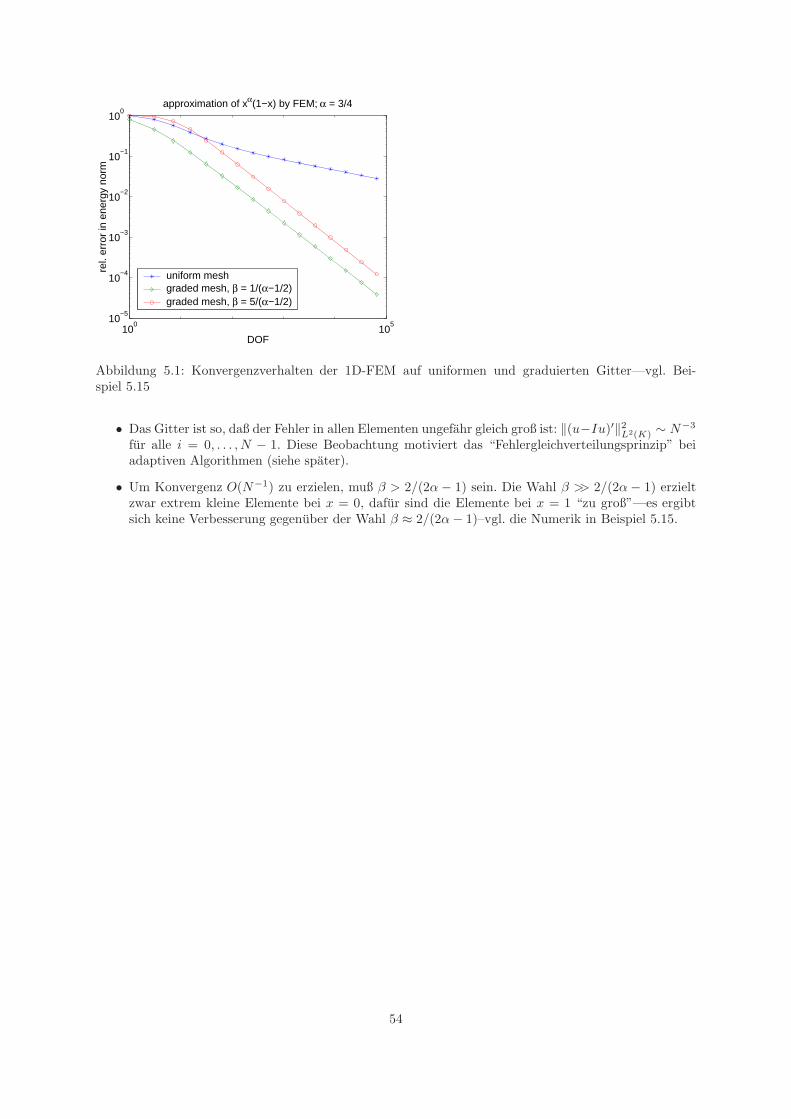
100
105
10−5
10−4
10−3
10−2
10−1
100
approximation of xα(1−x) by FEM; α = 3/4re
l. er
ror
in e
nerg
y no
rm
DOF
uniform mesh graded mesh, β = 1/(α−1/2)graded mesh, β = 5/(α−1/2)
Abbildung 5.1: Konvergenzverhalten der 1D-FEM auf uniformen und graduierten Gitter—vgl. Bei-spiel 5.15
• Das Gitter ist so, daß der Fehler in allen Elementen ungefahr gleich groß ist: ‖(u−Iu)′‖2L2(K) ∼ N−3
fur alle i = 0, . . . , N − 1. Diese Beobachtung motiviert das “Fehlergleichverteilungsprinzip” beiadaptiven Algorithmen (siehe spater).
• Um Konvergenz O(N−1) zu erzielen, muß β > 2/(2α− 1) sein. Die Wahl β >> 2/(2α− 1) erzieltzwar extrem kleine Elemente bei x = 0, dafur sind die Elemente bei x = 1 “zu groß”—es ergibtsich keine Verbesserung gegenuber der Wahl β ≈ 2/(2α− 1)–vgl. die Numerik in Beispiel 5.15.
54

Abbildung 5.2: Graduiertes Gitter (rechts) entsteht aus uniformem Gitter (links) mittels der Abbildungx �→ x‖x‖β−1
∞ ; hier ist β = 3.
Der 1D-Fall, insbesondere die Bedingung (5.7) an das Gitter, motiviert uns, folgende graduierte Gitterin 2D einzufuhren:
Definition 5.16 Sei Ω ⊂ R2 Polygon mit Ecken Aj, j = 1, . . . , J . Wahle β ∈ R
J mit βj ≥ 1, j =1, . . . , J . Fur jedes h ∈ (0, 1] sei T (h) eine regulare, γ-formregulare, affine Triangulierung von Ω. Dannheißt (T (h))h∈(0,1] ein Familie von graduierten Gittern (mit Graduierungsexponent β), falls es eineKonstante C > 0 und Umgebungen Uj, j = 1, . . . , J , gibt, so daß fur jedes K ∈ T (h) gilt:
(i) K ∩(Ω \ ∪J
j=1Uj
)= ∅ =⇒ C−1hK ≤ h ≤ ChK
(ii) K ⊂ Uj und Aj ∈ Kj =⇒ C−1hK ≤ h |dist(K,Aj)|1−1/βj ≤ ChK
(iii) K ⊂ Uj und Aj ∈ K =⇒ hK ≤ Chβj .
Bemerkung 5.17 • im “Inneren” von Ω (d.h. außerhalb der Umgebungen Uj) ist T (h) ein quasi-uniformes Gitter mit Gitterweite h
• die Wahl βj = 1 fuhrt zu einem quasi-uniformen Gitter in der Nahe von Aj .
Beispiel 5.18 Graduierte Gitter wie in Def. 5.16 definiert, konnten z.B. wie in 1D mittels einer Trans-formation aus regelmaßigen Gittern erzeugt werden. In Fig. 5.2 entstehen die Knoten des rechten Gittersmit der Abbildung x �→ x‖x‖β−1
l∞ .
Wir zeigen nun, daß die Approximationseigenschaften von graduierten Gittern denen von quasi-uniformenGittern ahneln, wenn (hinreichend) glatte Funktionen approximiert werden:
Satz 5.19 Sei T (h), h ∈ (0, 1] eine Familie von graduierten Gittern im Sinn von Def. 5.16. Dannexistieren C1, C2 > 0, welche nur von den Konstanten aus Def. 5.16 abhangen, so daß:
(i) dimS1,1(T (h)) ≤ 3∑
K∈T (h) 1 ≤ C1h−2
(ii) fur u ∈ H2(Ω) erfullt der nodale Interpolant Iu ∈ S1,1(T (h))
‖u− Iu‖L2(Ω) ≤ C2h2‖u‖H2(Ω), ‖∇(u− Iu)‖L2(Ω) ≤ C2h‖u‖H2(Ω).
Beweis: Die Abschatzungen in (ii) folgen aus Satz 5.1.Wir zeigen nun (i) und gehen in mehreren Schritten vor.
1. Schritt: Die Elemente von T (h) sind γ-formregular. Also existiert ein Winkel α > 0 (welcher nur von γabhangt), so daß alle Dreieckswinkel ≥ α > 0 sind. Damit konnen an jedem Knoten hochstens [2π/α]+1Elemente zusammenstoßen. Insbesondere ist damit die Anzahl Elemente, die an eine Ecke Aj anstoßendurch [2π/α] + 1 beschrankt:
#{K ∈ T (h) |Aj ∈ K} ≤ [2π/α] + 1 fur jedes j = 1, . . . , J und h ∈ (0, h]. (5.10)
55

2. Schritt: (Elemente im “Inneren”). Nach Bedingung (i) aus Def. 5.16 folgt
∑K:K∩(Ω\∪J
j=1Uj)�=∅
1 ≤ C∑K
h2K
h2≤ Ch−2
∑K
∫K
1 = Ch−2
∫Ω
≤ Ch−2 (5.11)
3. Schritt: (Elemente an der Ecke Aj , die die Ecke nicht beruhren). Wir behaupten: Fur K ∈ T (h) mitK ⊂ Uj und Aj ∈ K gilt fur dj(x) := dist(Aj , x)
C−1hK
(5.12.a)
≤ infx∈K
|dj(x)|1−1/βj(5.12.b)
≤ Ch supx∈K
|dj(x)|1−1/βj(5.12.c)
≤ ChK . (5.12)
Die Ungleichung (5.12.a) folgt aus Def. 5.16; (5.12.b) ist trivial. Fur (5.12.c) beobachten wir
h supx∈K
|dj(x)|1−1/βj ≤ h |dist(K,Aj) + hK |1−1/βj(ii), Def. 5.16
≤ Ch
[(hK
h
)βj/(βj−1)
+ hK
]1−1/βj
≤ C[h
βj/(βj−1)K + hβj/(βj−1)hK
]1−1/βj
Weiter ist fur Elemente K mit Aj ∈ K
dist(K,Aj) ≥ Chβj ,
denn die unmittelbar an Aj anstoßenden Elemente haben Große ∼ hβj . Also gilt wiederum wegenDef. 5.16, (ii)
hK ≥ Ch| dist(K,Aj)|1−1/βj ≥ Ch|hβj |1−1/βj = Chβj ,
was uns auf
h supx∈K
|dj(x)|1−1/βj ≤ C[h
βj/(βj−1)K + hβj/(βj−1)hK
]1−1/βj
≤ C[h
βj/(βj−1)K + h
1/(βj−1)K hK
]1−1/βj
≤ ChK
fuhrt.4. Schritt: Wir werten nun
∑K∈T (h):Aj �∈K,K⊂Uj
1 aus. Aus (5.12) folgt
∑K∈T (h)K⊂Uj
Aj �∈K
1 ≤ C∑
K∈T (h)K⊂Uj
Aj �∈K
1h2
K
∫K
1(5.12)
≤ C∑
K∈T (h)K⊂Uj
Aj �∈K
h−2
∫K
(1
supx∈K dj(x)
)2(1−1/βj)
≤ C∑
K∈T (h)K⊂Uj
Aj �∈K
h−2
∫K
(1
dj(x)
)2(1−1/βj)
≤ Ch−2
∫Ω
d−2(1−1/βj)j ≤ Ch−2
∫ diam Ω
r=0
r−2(1−1/βj)r dr = Ch−2r2/βj
∣∣∣r=diamΩ
r=0≤ Ch−2. (5.13)
Zusammenfassen von (5.10), (5.11), (5.13) ergibt dann die gewunschte Behauptung (i). �
Satz 5.19 zeigt, daß die Anzahl Elemente in graduierten Gittern immer noch O(h−2) ist. Wir zeigennun, daß die Tatsache, daß die Elemente an den Ecken Aj wesentlich kleiner als O(h) sind uns hilft, dieSingularitatenfunktionen Sjk aus (5.6) gut zu approximieren.
Satz 5.20 Sei Ω ⊂ R2 und A1 = 0. Sei u in Polarkoordinaten gegeben durch u(r, ϕ) = rαΦ(r, φ) fur ein
α ∈ (0, 1) und ein glattes Φ. Sei (T (h))h∈(0,1] eine Familie von graduierten Gittern mit β1 > 1/α. Dannexistiert ein C > 0 unabhangig von h, so daß fur den nodalen Interpolanten Iu gilt:
‖u− Iu‖L2(Ω) ≤ Ch2, ‖∇(u− Iu)‖L2(Ω) ≤ Ch.
56

Beweis: Wir betrachten nur die Approximation auf U1, d.h.∑
K:K⊂U1
‖u− Iu‖2L2(K) und
∑K:K⊂U1
‖∇(u− Iu)‖2L2(K)
Wir betrachten die Falle A1 ∈ K und A1 ∈ K getrennt.1. Fall: Betrachte ein Element K mit A1 ∈ K. Dann ist hK ≤ Chβ1 . Definiere u := u|K ◦FK . Dann folgt
‖∇(u− Iu)‖L2(K) ≤ ‖∇u‖L2(K) + ‖∇(Iu)‖L2(K).
Der erste Term wird wie folgt abgeschatzt:
‖∇u‖2L2(K) ≤ C
∫ hK
r=0
r2(α−1)r dr ≤ Ch2αK ≤ Ch2αβ1 ≤ Ch2,
weil β1 > 1/α. Auch der zweite Term, ‖∇(Iu)‖L2(K), laßt sich direkt abschatzen. Bezeichnet man wieder
mit I : C(K) → P1 den Interpolationsoperator, der in den drei Eckpunkten von K interpoliert, dann gilt
‖∇(Iu)‖2L2(K) ≤ C‖∇I u‖2
L2( bK)≤ C‖Iu‖2
L∞( bK)≤ C‖u‖2
L∞( bK)≤ C‖u‖2
L∞(K) ≤ Ch2αK = Ch2αβ1 ≤ Ch2.
Zusammenfassend erhalten wir ‖∇(u− Iu)‖L2(K) ≤ Ch. Analog bemerken wir
‖u− Iu‖L2(K) ≤ ‖u‖L2(K) + ‖Iu‖L2(K) ≤ 2‖u‖L∞(K)
√|K| ≤ Chα
KhK = Chα+1K ≤ Ch(1+α)β1 ≤ Ch2,
weil αβ1 ≥ 1 und β1 ≥ 1. Weil die Anzahl Elemente, die an A1 anstoßen, beschrankt ist (die Schrankehangt nur von der Formregularitatskonstante γ ab—siehe (5.10)), erhalten wir also
∑K:A1∈K
‖u− Iu‖2L2(K) ≤ Ch4,
∑K:A1∈K
‖∇(u− Iu)‖2L2(K) ≤ Ch2, (5.14)
wobei die Konstante C > 0 nur von α und γ abhangt.2. Fall: Betrachte ein Element K ⊂ U1 mit A1 ∈ K. Nun ist u|K ∈ H2(K), und die Abschatzung ausSatz 5.1 liefert
‖u− Iu‖L2(K) ≤ Ch2K |u|H2(K), ‖∇(u− Iu)‖L2(K) ≤ ChK |u|H2(K).
Damit ergibt sich durch Summation (und die Abkurzung d1(x) = dist(A1, x))
∑K⊂U1A1 �∈K
‖∇(u− Iu)‖2L2(K) ≤ C
∑K⊂U1A1 �∈K
h2K
∑|α|=2
∫K
|Dαu|2 ≤ C∑
K⊂U1A1 �∈K
h2K
∫K
|d1(x)|2(α−2)
Aus (5.12) ergibt sich hK ≤ Ch|d1(x)|1−1/β1 fur alle x ∈ K so daß
∑K⊂U1A1 �∈K
‖∇(u− Iu)‖2L2(K) ≤ Ch2
∑K⊂U1A1 �∈K
∫K
|d1(x)|2(1−1/β1)+2(α−2) ≤ Ch2
∫Ω
|d1(x)|−2−2/β1+2α
≤ Ch2
∫ diamΩ
r=0
r−2−2/β1+2αr dr ≤ Ch2r2(α−1/β1)∣∣∣diamΩ
0≤ Ch2,
weil β1 > 1/α. Analog ergibt sich
∑K⊂U1A1 �∈K
‖u− Iu‖2L2(K) ≤ C
∑K⊂U1A1 �∈K
h4K |u|2H2(K) ≤ Ch4
∑K⊂U1A1 �∈K
∫K
|d1(x)|4(1−1/β1)+2(α−2) ≤ Ch4, (5.15)
denn αβ1 > 1 und β1 ≥ 1 implizieren 4(1 − 1/β1) + 2(α− 2) + 1 > −1. �
57

Bemerkung 5.21 Theorem 5.20 zeigt, daß die typischen Singularitatenfunktionen mit der optimalenKonvergenzrate
‖u− Iu‖H1(Ω) ≤ CN−1/2, N = dimS1,1(T (h))
approximiert werden konnen, wenn nur der Graduierungsexponent β1 hinreichend groß gewahlt wird.Mit anderen Worten: Vom Standpunkt “Fehler gegen Problemgroße” ist die Approximation von Sin-gularitatenfunktionen auf graduierten Gittern so gut wie die Approximation von H2-Funktionen aufquasi-uniformen Gittern.
Korollar 5.22 Sei u ∈ H1(Ω) von der Form wie in Satz 5.9 angegeben fur ein s ≥ 1. Sei (T (h))h∈(0,1]
eine Familie von graduierten Gittern. Dann gilt: Falls die Graduierungsexponenten βj ≥ 1 die Bedingungβj >
ωj
π erfullen, dann existiert ein C > 0, welches unabhangig von h ist, so daß
‖u− Iu‖L2(Ω) ≤ Ch2, ‖∇(u− Iu)‖L2(Ω) ≤ Ch, dimS1,1(T (h)) ≤ Ch−2.
Beweis: Auf Ω \ (∪Jj=1Uj) ist u ∈ Hs+1 mit s ≥ 1 (nach Voraussetzung). Damit ist Satz 5.1 anwendbar.
Fur die Elemente K mit K ⊂ Uj fur ein j ∈ {1, . . . , J} schreiben wir nach Satz 5.9 u = u1 + u2,wobei u1 ∈ H2(Ω) und u2 eine endliche Summe von Singularitatenfunktion vom Typ (5.6) ist. Fur dieApproximation von u1 greift Satz 5.1, fur u2 Satz 5.20. �
Analoge Aussagen fur Elemente hoherer Ordnung konnen bewiesen werden:
Satz 5.23 Sei fur ein s ≥ 1 die Funktion u von der Form wie in Satz 5.9 angegeben. Sei (T (h))h∈(0,1]
eine Familie von graduierten Gittern. Falls die Graduierungsexponenten βj so gewahlt sind, daß
βj ≥ 1, βj > pωj
πj ∈ {1, . . . , J},
dann existiert ein C > 0, welches nur von u, p, β, γ abhangt, mit folgenden Eigenschaften: Es existiertein v ∈ Sp,1(T (h)) ∩H1
0 (Ω) mit
‖u− v‖L2(Ω) ≤ Chmin{p,s}+1, ‖∇(u− v)‖L2(Ω) ≤ Chmin{p,s}, dimSp,1(T (h)) ≤ Ch−2.
Bemerkung 5.24 Satz 5.23 zeigt, daß auch bei Ansatzen hoherer Ordnung die optimale Konvergenzrateerzielt werden kann, d.h. die Konvergenzrate (im Maß: “Fehler gegen Problemgroße”) ist der Approxi-mation einer Funktion u ∈ Hs+1(Ω) auf quasi-uniformen Gittern vergleichbar.
Zur Motivation des folgenden Kapitels machen wir noch folgende Beobachtungen:
• die Konstruktion eines graduierten Gitters ist nicht einfach
• wir benotigen (zumindest Schranken fur) die Singularitatenexponenten, um die Graduierungsex-ponenten βj richtig zu wahlen. Im Fall des hier vorgestellten Poissonproblems ist dies einfach(im Fall des Dirichletproblems sind die Singularitatenfunktionen mit (5.6) explizit bekannt!)—inkomplexeren Problemen, z.B. im Fall der Elastizitatsgleichungen, ist zwar die Struktur der Singu-laritatenfunktion (die Komponenten verhalten sich ebenfalls typischerweise wie rαΦ(r, ϕ)), nichtaber der Parameter α (welcher ja wesentlich ist fur die Wahl des Graduierungsexponenten).
• Graduierte Gitter liefern die optimale Konvergenzrate fur eine ganze Klasse von Problemen—imkonkret gestellten Einzelfall kann es naturlich sein, daß, um eine gegebene Genauigkeit zu erreichen,ein wesentlich groberes Gitter ausreicht. M.a.W.: Es ist von Interesse, Strategien zu entwickeln, diedie moglichst effiziente Gitter fur ein gegebenes Problem erzeugen. Adaptive Algorithmen, die diesleisten werden im folgenden Kapitel diskutiert.
58
Kapitel 6
Fehlerschatzung und Adaptivitat
Ziel von Adaptivitat:
• Effizienz: Es soll mit moglichst geringem Aufwand eine Approximation uFE an die gesuchte Losungu gefunden werden, die eine vorgegebene Genauigkeitsanforderung erfullt. Ein (grobes) Maß furden Aufwand ist die Anzahl Elemente des Gitters, welches uFE festlegt. Adaptive Algorithmenkonstruieren Gitter, die diesem Ideal nahekommen.
• Robustheit: Die Diskussion im vorangehenden Kapitel hat gezeigt hat, daß mit sehr prazisem Wissenuber das Verhalten der gesuchten Losung es moglich ist, gute Gitter zu konstruieren. Dies setztjedoch einen sehr gut geschulten “Benutzer” eines FEM-Programms voraus. Zudem ist ein solchesVorgehen risikobehaftet, weil der “Benutzer” das richtige Gitter konstruiert haben muß1. Eineautomatische Konstruktion von Gittern kann helfen, Fehler zu vermeiden.
Adaptive Algorithmen basieren auf Fehlerschatzern, die die Gitterverfeinerung steuern.Ziel von Fehlerschatzern:
• Fehlerschatzer als Abbruchkriterium: Schatzen des Fehlers u − uFE , um zu entscheiden, ob eineApproximation uFE hinreichend genau ist
• Fehlerschatzer als Steuerungsmechanismen: Schatzen des Fehlers (u − uFE)|K fur ein Element K,um zu entscheiden, ob dieses Element verfeinert werden muß.
Wir fuhren die Herleitung eines a posteriori (“im Nachhinein”) am folgenden Modellproblem vor:
−Δu = f auf Polygon Ω ⊂ R2, (6.1a)u = 0 auf ΓD, ∂nu = g auf ΓN . (6.1b)
Hier sind ΓD, ΓN wie in Abschnitt 4.2. Wir fordern der Einfachheit halber |ΓD| > 0; ΓN = ∅ ist jedochzugelassen. Weiter fordern wir f ∈ L2(Ω), g ∈ L2(ΓN ). Die schwache Formulierung ist:
Finde u ∈ H10 (Ω,ΓD) s.d. B(u, v) :=
∫Ω
∇u · ∇v = l(v) :=∫
Ω
fv +∫
ΓN
gv ∀v ∈ H10 (Ω,ΓD),
(6.2)wobei wir wiederum H1
0 (Ω,ΓD) := {u ∈ H1(Ω) | (γ0u)|ΓD = 0} gesetzt haben.
6.1 Notation und der Clementinterpolant
Wir betrachten nur regulare, affine, γ-formregulare Triangulierungen und verwenden folgende Notation:
• E(K) := Menge der 3 Kanten, von K ∈ T
• N (K) := Menge der 3 Knoten von K ∈ T1das Sinken der Bohrinsel Sleipner A im Jahr 1991 mit einem Schaden von fast 1 Milliarde US-Dollar ging letztendlich
auf ein falsch ausgelegtes FEM-Gitter zuruck
59

�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������
K
ωK
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
�����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
����������������������������������������������������������������������������������������������������������������������������������������������������������������
����������������������������������������������������������������������������������������������������������������������������������������������������������������
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������
���������������������������������������������������������������������������������������������������������������������������������������������������������������������������
K
ωK
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
e
ωe
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
����������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
��������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
e
ωe
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������������
ωV
Abbildung 6.1: Gebiete ωK , ωK , ωe, ωe, ωV
• E(T ) = ∪K∈T {e ∈ E(K) | e ⊂ Ω} = Menge der inneren Kanten
• EN(T ) = ∪{e ∈ E(K) | e ⊂ ΓN} = Menge der Kanten, die auf ΓN liegen
• N (T ) = Menge der Knoten von T
• N (e) = Menge der 2 Endpunkte der Kante e
Weiter definieren wir
ωK :=
⎛⎜⎜⎝
⋃K′∈T
E(K)∩E(K′)
K ′
⎞⎟⎟⎠
◦
, ωK :=
⎛⎜⎜⎝
⋃K′∈T
N (K)∩N (K′)
K ′
⎞⎟⎟⎠
◦
ωe :=
⎛⎜⎜⎝
⋃K∈T
e∈E(K)
K
⎞⎟⎟⎠
◦
, ωe :=
⎛⎜⎜⎝
⋃K∈T
N (e)∩N (K) �=∅
K
⎞⎟⎟⎠
◦
, ωV :=
⎛⎜⎜⎝
⋃K∈T
V ∈N (K)
K
⎞⎟⎟⎠
◦
Im folgenden betrachten wir nun Triangulierungen, die zu den Randbedingungen “passen” in dem Sinn,daß die folgende Annahme erfullt ist:
Voraussetzung 6.1 Die Triangulation T is regular, affin, γ-formregular und ΓD∩ΓN ⊂ N (T ). M.a.W.:eine Kante e mit e ⊂ ∂Ω erfullt entweder e ⊂ ΓD oder e ⊂ ΓN .
Bei γ-formregularen Triangulierungen sind die Elementgroßen benachbarter Elemente vergleichbar:
Lemma 6.2 Sei T regulare, affine, γ-formregulare Triangulierung eines Polygons. Dann existiert C > 0,welches nur von γ abhangt, so daß
diamωK ≤ diam ωK ≤ ChK ∀K ∈ Tdiamωe ≤ diam ωe ≤ Che ∀e ∈ E(T ), he := diam e
diamωV ≤ ChK ∀(V,K) ∈ N (T ) × T mit V ∈ N (K)#{K ′ |K ′ ⊂ ωK} ≤ C ∀K ∈ T#{K |K ⊂ ωe} ≤ C ∀e ∈ E(T )
60

Beweis: Elementar. Wesentlich ist, daß die Formregularitatskonstante γ die Innenwinkel der Dreieckekontrolliert, so daß
mine∈E(K)
he ∼ hK ∼ maxe∈E(K)he
gilt. �
Wir kommen nun zum Clementinterpolanten:
Satz 6.3 Gelte Voraussetzung 6.1. Dann existiert ein C > 0, welches nur von γ und ΓD abhangt undein linearer Operator IC : H1
0 (Ω,ΓD) → S1,1(T ) ∩H10 (Ω,ΓD) derart, daß
‖u− ICu‖L2(K) ≤ ChK‖∇u‖L2(eωK) ∀K ∈ T‖∇(u− ICu)‖L2(K) ≤ ChK‖∇u‖L2(eωK) ∀K ∈ T‖∇(u− ICu)‖L2(e) ≤ C
√he‖∇u‖L2(eωe) ∀e ∈ E(T ) ∪ EN (T )
Beweis: Ein vollstandiger Beweis befindet sich im Appendix. Wir illustrieren die Kernidee fur deneinfachen Fall, daß ΓD = ∅ und ein regelmaßiges Gitter vorliegt. Wir definieren den Operator I : H1(Ω) →S1,1(T ) dadurch, daß fur jeden Knoten V ∈ N (T ) der Knotenwert (Iu)(V ) := uV gesetzt wird mit
uV :=1
|ωV |
∫ωV
u.
Eine andere Darstellung von Iu ist damit Iu =∑
V ∈N (T ) uV ϕV , wobei ϕV ∈ S1,1(T ) die Hutfunktion ist,die zum Knoten V ∈ N (T ) gehort. Wir nutzen nun aus, daß fur jedes DreieckK ∈ T gilt:
∑V ∈N (K) ϕV ≡
1 auf K. Damit erhalten wir unter Berucksichtigung von ‖ϕV ‖L∞(K) ≤ 1:
‖u− Iu‖L2(K) = ‖∑
V ∈N (K)
ϕV (u− uV )‖L2(K) ≤∑
V ∈N (K)
‖u− uV ‖L2(K)
Nun ist fur V ∈ N (K):
‖u− uV ‖L2(K) ≤ ‖u− uV ‖L2(ωV ) ≤ ChV ‖∇u‖L2(ωV ),
wobei hV = diamωV und C > 0 hangt nur von der Form (nicht aber der Große!) von ωV ab. Dieseletzte Abschatzung ergibt aus der 2. Poincareschen Ungleichung (Satz 3.28) und einem Skalierungsargu-ment: Man definiert eine affine Abbildung FV als Verkettung einer Translation, einer Rotation und einerStreckung um 1/hV derart, daß ωV = FV (ωV ), wobei diam ωV = 1. Anschließend wendet man auf ωV die2. Poincaresche Ungleichung auf u := u◦FV an. Rucktransformation auf ωV liefert dann die Behauptung.Die Konstante hangt nur von ωV ab. Der Beweis wird nun abgeschlossen durch die Beobachtung, daßman bei regelmaßigen Gittern mit endlich vielen “Referenzpatches” auskommt.
Fur die Abschatzung fur ∇Iu gehen wir analog vor. Auf Element K haben wir
‖∇(u− Iu)‖L2(K) = ‖∑
V ∈N (K)
∇ϕV (u− uV )‖L2(K) = ‖∑
V ∈N (K)
(∇ϕV )(u − uV ) + ϕV ∇(u− uV )‖L2(K).
Aus der Formregularitat des Gitters folgt ‖∇ϕV ‖L∞(K) ≤ Ch−1V fur alle V ∈ N (K). Damit ergibt sich
‖∇(u− Iu)‖L2(K) ≤ Ch−1V ‖u− uV ‖L2(K) + C‖∇u‖L2(K),
und der erste Term wurde bereits oben abgeschatzt.Fur die Abschatzung fur ‖u−Iu‖L2(e) fur eine Kante e gehen wir wie folgt vor. Sei K ∈ T ein Dreieck
der Triangulierung, welches e als Kante hat. Sei FK die Elementabbildung fur K. Dann gilt nach demSpursatz (Satz 3.30) auf K fur den pull-back u− Iu:
‖u− Iu‖L2(F−1K (e)) ≤ C‖u− Iu‖H1( bK).
Transformiert man wieder auf e und K zuruck, so ergibt sich
‖u−Iu‖L2(e) ≤ Ch1/2e ‖u− Iu‖L2(F−1
K (e)) ≤ Ch1/2e ‖u− Iu‖H1( bK) ≤ Ch1/2
e
(h−1
K ‖u− Iu‖L2(K) + |u− Iu|H1(K)
)Nutzt man nun die Resultate fur ‖u− Iu‖L2(K) und |u− Iu|H1(K) aus, so ergibt sich die Behauptung. �
61

6.2 Ein residualer Fehlerschatzer
Sei u Losung von (6.1) und sei VN ⊂ S1,1(T ) ∩H10 (Ω,ΓD) und uN ∈ VN Losung von
Finde uN ∈ VN s.d. B(uN , v) = l(v) ∀v ∈ VN . (6.3)
Dann gilt:
B(u− uN , v) = 0 ∀v ∈ VN Galerkinorthogonalitat (6.4)B(u− uN , v) = R(v) := l(v) −B(uN , v) ∀v ∈ H1
0 (Ω,ΓD) Residualgleichung (6.5)
Insbesondere erfullt das Residuum R die Orthogonalitatsbedingung
R(v) = 0 ∀v ∈ VN . (6.6)
Weiter ist wegen der Annahme |ΓD| > 0 die Energienorm (gegeben durch ‖v‖2E = B(v, v)) eine Norm
auf H10 (Ω,ΓD) und erfullt
‖v‖E ≤ ‖v‖H1(Ω) ≤ C‖v‖E . (6.7)
Damit konnen wir die Bestimmung des Fehlers ‖u − uN‖E umschreiben als ein Problem, die Norm desResiduums R zu berechnen:
‖u− uN‖E = supv∈H1
0 (Ω,ΓD)
B(u− uN , v)‖v‖E
(6.5)= sup
v∈H10 (Ω,ΓD)
R(v)‖v‖E
. (6.8)
Wir mussen nun dieses Supremum abschatzen. Dies geschieht durch Ausnutzen der Galerkinorthogona-litat und der Beobachtung (6.7). Elementweise partielle Integration liefert uns
R(v) = l(v) −B(uN , v) =∑K
∫K
(fv −∇uN · ∇v) +∑
e∈EN (T )
gv
=∑K
∫K
(f + ΔuN)v −∑
e∈E(T )
∫e
[∂nuN ]v +∑
e∈EN (T )
(g − ∂nuN )v
wobei der Sprung der Normalenableitung [∂nuN ] definiert ist
[∂nuN ]|e := nK · ∇uN + nK′ · ∇uN , (6.9)
wobei K, K ′ die beiden Elemente sind, die sich die Kante e teilen und nK und nK′ die außeren Nor-malenvektoren von K bzw. K ′ sind. Wegen (6.6) gilt R(v) = R(v − w) fur alle v ∈ H1
0 (Ω,ΓD) und allew ∈ VN . Insbesondere folgt damit fur den Clementinterpolanten w = ICv aus Satz 6.3
|R(v)| = |R(v − ICv)| =
∣∣∣∣∣∣∑K
∫K
(f + ΔuN )(v − ICv) −∑
e∈E(T )
∫e
[∂nuN ](v − ICv) +∑
e∈EN (T )
∫e
(g − ∂nuN )(v − ICv)
∣∣∣∣∣∣≤
∑K
‖f + ΔuN‖L2(K)‖v − ICv‖L2(K) +∑
e∈E(T )
‖[∂nuN ]‖L2(e)‖v − ICv‖L2(e)
+∑
e∈EN (T )
‖g − ∂nuN‖L2(e)‖v − ICv‖L2(e)
Satz 6.3≤ C
∑K
hK‖f + ΔuN‖L2(K)‖∇v‖L2(eωK) +∑e∈E
√he‖[∂nuN ]‖L2(e)‖∇v‖L2(eωe)
+∑
e∈EN
√he‖g − ∂nuN‖L2(e)‖∇u‖L2(eωe)
C.S. fur Summen
≤ C
√∑K
h2K‖f + ΔuN‖2
L2(K)
√∑K
‖∇v‖2L2(eωK) + C
√∑e∈E
he‖[∂nuN ]‖2L2(e)
√∑e∈E
‖∇v‖2L2(eωe)
+ C
√∑e∈EN
he‖g − ∂nuN‖2L2(e)
√∑e∈EN
‖∇v‖2L2(eωe)
62

Wir behaupten nun, daß aufgrund der Formregularitat des Gitters gilt:∑K
‖∇v‖2L2(eωK) ≤ C‖∇v‖2
L2(Ω) (6.10)
∑e∈E∪EN
‖∇v‖2L2(eωe) ≤ C‖∇v‖2
L2(Ω) (6.11)
Wir zeigen nur (6.10):
∑K
‖∇v‖2L2(eωK) =
∑K
∑K′:K′⊂eωK
‖∇v‖2L2(K′) =
∑K′
∑K:K′⊂eωK
‖∇v‖2L2(K′) =
∑K′
‖∇v‖2L2(K′)
⎛⎝ ∑
K:K′⊂eωK
1
⎞⎠
=∑K′
‖∇v‖2L2(K′)
∑K∈T
N (K)∩N (K′) �=∅
1 =∑K′
‖∇v‖2L2(K′)
∑K:K⊂eωK′
1Lemma 6.2
≤ C‖∇v‖2L2(Ω).
Damit erhalten wir
|R(v)| ≤ C‖∇v‖L2(Ω)
⎛⎝√∑
K
h2K‖f + ΔuN‖2
L2(K) +√∑
e∈Ehe‖[∂nuN ]‖2
L2(e) +√∑
e∈EN
he‖g − ∂nuN‖2L2(e)
⎞⎠
≤ C‖∇v‖L2(Ω)
√∑K
h2K‖f + ΔuN‖2
L2(K) +∑e∈E
he‖[∂nuN ]‖2L2(e) +
∑e∈EN
he‖g − ∂nuN‖2L2(e)
Wir fassen nun die Sprungterme etwas anders zusammen, indem wir die Abkurzung
η2K := h2
K‖f + ΔuN‖2L2(K) +
12
∑e∈E(K)∩E(T )
he‖[∂nuN ]‖2L2(e) +
∑e∈E(K)∩EN (T )
he‖g − ∂nuN‖2L2(e) (6.12)
einfuhren. Zusammenfassend erhalten wir
|R(v)| ≤ C‖∇v‖L2(Ω)
√∑K∈T
η2K (6.13)
Somit ergibt sich aus (6.8)
Satz 6.4 Es gelte Voraussetzung 6.1. Dann existiert eine Konstante C > 0, welche nur von der Formre-gularitatskonstante γ und ΓD abhangt, so daß die durch (6.12) definierten Elementfehlerindikatoren ηK
fur
EST :=√∑
K∈Tη2
K (6.14)
die Abschatzung‖∇(u− uN)‖L2(Ω) = ‖u− uN‖E ≤ C EST
erfullen.
Beweis: Setze (6.13) in (6.8) ein und beobachte ‖v‖E = ‖∇v‖L2(Ω). �
Bemerkung 6.5 • Der Fehlerschatzer EST ist berechenbar, denn es gehen nur bekannte Großen (uN ,f , g) ein.
• In der Praxis werden die Elementindikatoren ηK als Indikatoren fur den Fehler auf dem ElementK verwendet, um zu entscheiden, welche Elemente verfeinert werden sollen.
63

Allgemein nennt man einen berechenbaren Ausdruck EST einen zuverlassigen Fehlerschatzer, falls ‖u−uN‖E ≤ C EST gilt fur eine Konstante C > 0, die nicht von uN abhangt. Ein solcher berechenbarerAusdruck heißt effizient, falls EST ≤ C‖u − uN‖E fur eine von uN unabhangige Konstante gilt. Offen-sichtlich ist man an Fehlerschatzern interessiert, die sowohl zuverlassig als auch effizient sind, d.h. denFehler weder zu sehr uberschatzen noch unterschatzen. Der Fehlerschatzer EST aus (6.14) erfullt dieseForderung im folgenden Sinn:
Satz 6.6 Es gelte Voraussetzung 6.1. Dann existiert C > 0, welches nur von der Formregularitatskon-stante γ und ΓD abhangt, so daß EST aus (6.14) die folgende Abschatzung erfullt:
EST2 ≤ C
{‖∇(u− uN)‖2
L2(Ω) +∑K
h2K‖f − fT ‖2
L2(K) +∑
e∈EN
he‖g − gT ‖2L2(e)
}. (6.15)
Hier sind die stuckweise konstanten Funktionen fT , gT gegeben als Mittelwerte:
fT |K =1|K|
∫K
f, gT |e =1|e|
∫e
g.
Es gilt sogar folgende Abschatzung fur die Fehlerindikatoren ηK :
η2K ≤ C
⎡⎣‖∇(u− uN)‖2
L2(ωK) + h2K‖f − fT ‖2
L2(ωK) +∑
e∈EN∩E(K)
he‖g − gT ‖2L2(e)
⎤⎦ (6.16)
Beweis von Satz 6.6: Der Beweis von Satz 6.6 ist lang und deshalb in mehrere Teilschritte zerlegt, dieals Lemmata 6.7, 6.8, 6.9 formuliert sind. �
Bevor wir Lemmata 6.7, 6.8, 6.9 formulieren und beweisen, bemerken wir, daß die Beitrage∑
K h2K‖f −
fT ‖2L2(K) und
∑e∈EN
he‖g−gT ‖2L2(e) “von hoherer Ordnung” sind, d.h. man erwartet/hofft, daß diese Bei-
trage klein sind gegenuber dem Fehler ‖∇(u− uN )‖2L2(Ω). Als Motivation fur diese Erwartung/Hoffnung
betrachten wir den Fall eines quasiuniformen Gitters mit Gitterweite h. Sind f und g stuckweise glatt (al-so z.B. f |K ∈ H1(K) fur jedes K ∈ T und
∑K∈T ‖f‖2
H1(K) <∞ sowie g|e ∈ H1(e) fur jedes e ∈ EN mit∑e∈EN
‖g‖2H1(e)), dann sind die Beitrage von f −fT und g−gT in (6.15) von der Große h3. Andererseits
erwarten wir selbst bei exakter Losung u ∈ H2(Ω) nur ‖∇(u− uN )‖2L2(Ω) ∼ h2.
Lemma 6.7 Es existiert C > 0, welches nur von der Formregularitatskonstante γ abhangt, so daß furalle K ∈ T
h2K‖f + ΔuN‖2
L2(K) ≤ C[‖∇(u− uN)‖2
L2(K) + h2K‖f − fT ‖2
L2(K)
].
Beweis: Wir fixieren ein Element K ∈ T . Wir definieren eine “Blasenformfunktion” bK ∈ H10 (Ω) mit
Trager supp bK ⊂ K durch bK := b ◦ F−1K und
b(ξ, η) := ξη(1 − ξ − η)
(Hier sei daran erinnert, daß K = {(ξ, η) | 0 < ξ < 1, 0 < η < 1 − ξ}). Wir behaupten, daß ein C > 0gibt, welches nur von der Formregularitatskonstante γ abhangt, so daß
‖√bK‖2
L2(K) =160
|K| (6.17)
‖∇bK‖L2(K) ≤C′
hK‖bK‖L2(K) ≤ C, (6.18)
Fur die erste Gleichung bemerken wir, daß | detF ′K | = 2|K| und berechnen dann ‖
√bK‖2
L2(K) =∫
K bK =∫bKb | detF ′
K | = 2|K|∫
bKb = 2/120|K|. Ungleichung (6.18) ist eine inverse Ungleichung, dessen Beweis
als Ubung empfohlen ist.
64

Definiere (fur das oben fixierte K) die Funktion
v := (fT + ΔuN )︸ ︷︷ ︸∈R
bK ∈ H10 (K) ⊂ H1
0 (Ω)
Die Dreiecksungleichung liefert
h2K‖f + ΔuN‖2
L2(K) ≤ 2h2K‖f − fT ‖2
L2(K) + 2h2K‖fT + ΔuN‖2
L2(K).
Weiter schatzen wir ab wegen fT + ΔuN ∈ R
‖fT + ΔuN‖2L2(K) = 60‖
√bK(fT + ΔuN)‖2
L2(K) = 60∫
K
(fT + ΔuN )2bK = 60∫
K
(fT + ΔuN )v
v∈H10 (K)= 60
(∫K
fT v −∫
K
∇uN · ∇v)
= 60(∫
K
fv −∫
K
∇uN · ∇v +∫
K
(fT − f)v)
v∈H10 (Ω),(6.2)= 60
(∫Ω
∇u · ∇v −∫
K
∇uN · ∇v +∫
K
(fT − f))
supp v⊂K= 60
(∫K
∇u · ∇v −∫
K
∇uN · ∇v +∫
K
(fT − f))
≤ 60‖∇(u− uN)‖L2(K)‖∇v‖L2(K) + 60‖fT − f‖L2(K)‖v‖L2(K)
Wir verwenden nun die Definition von v sowie (6.17), (6.18) und die Tatsache, daß fT + ΔuN ∈ R, umzu erhalten:
‖∇v‖L2(K) = |fT + ΔuN |‖∇bK‖L2(K) ≤ C|fT + ΔuN | ≤ Ch−1K ‖fT + ΔuN‖L2(K)
‖v‖L2(K) = |fT + ΔuN |‖bK‖L2(K) =√
30‖fT + ΔuN‖L2(K)
Einsetzen dieser Abschatzungen und Kurzen mit ‖fT + ΔuN‖L2(K) liefert
‖fT + ΔuN‖L2(K) ≤ Ch−1K ‖∇(u− uN)‖L2(K) + C‖f − fT ‖L2(K),
was gerade die gewunschte Behauptung ist. �
Lemma 6.8 Es existiert eine Konstante C > 0, welche nur von der Formregularitatskonstante γ abhangt,so daß fur alle inneren Kanten e ∈ E(T ) gilt:
he‖[∂nuN ]‖2L2(e) ≤ C
[‖∇(u− uN)‖2
L2(ωe) + h2e‖f − fT ‖2
L2(ωe)
]
Beweis: Der Beweis erfolgt ahnlich wie der von Lemma 6.7 durch geschickte Wahl einer Testfunktion.Sei e ∈ E(T ) fixiert. Setze η2
e,E := he‖[∂nuN ]‖2L2(e). Seien K, K ′ ∈ T die Elemente mit K ∩K ′ = e; es
ist also K ∪K ′ ∪ e = ωe. Weiter sei be ∈ S2,1(T ) die quadratische Blasenformfunktion, die zur Kante egehort, d.h. sie erfullt
supp be ⊂ ωe
be|e ist ein quadratisches Polynom mit be(m) = 1, wobei m der Mittelpunkt von e ist.
Wir betrachten nun die Funktionv := [∂nuN ]|ebe.
Weil [∂nuN ]|e ∈ R, ist v ∈ H10 (ωe) ⊂ H1
0 (Ω). Weiter zeigt eine Rechnung∫
e
be = he
∫ 1
0
4x(1 − x) dx =23he (6.19)
‖be‖2L2(K) =
26|K| falls e Kante von K ∈ T (6.20)
‖v‖2L2(ωe) ≤ Cη2
e,E (6.21)
‖∇v‖L2(ωe) ≤ Ch−1e ‖v‖L2(ωe) ≤ Ch−1
e ηe,E . (6.22)
65

Wir zeigen nur (6.21)—die inverse Ungleichung (6.22) wird mit ahnlichen Techniken gezeigt. Es ist
‖v‖2L2(ωe) =
∫ωe
([∂nuN ]|e)2 b2e = |[∂nuN ]|e|2(∫
K
b2e +∫
K′b2e
)
= |[∂nuN ]|e|2(
2|K|16
+ 2|K ′|16
)≤ Che he |[∂nuN ]|e|2︸ ︷︷ ︸
∼‖[∂nuN ]‖2L2(e)
≤ Cη2e,E .
Damit haben wir (6.21) gezeigt. Wir schatzen nun ab:
η2e,E = he‖[∂nuN ]‖2
L2(e) = he |[∂nuN ]|2∫
e
1 = he |[∂nuN ]|2 32
∫e
be =32he
∫e
v[∂nuN ]
Wir nutzen nun, daß v ∈ H10 (ωe) und erhalten damit durch partielle Integration auf K und auf K ′
η2e,E =
32he
[∫K
ΔuNv +∫
K
∇uN · ∇v +∫
K′ΔuNv +
∫K′
∇uN · ∇v]
=32he
[∫K
(f + ΔuN )v +∫
K
∇uN · ∇v +∫
K′(f + ΔuN )v +
∫K′
∇uN · ∇v −∫
ωe
fv
].
Wegen v ∈ H10 (ωe) ⊂ H1
0 (Ω) ⊂ H10 (Ω,ΓD) konnen wir v als Testfunktion in der schwachen Formulierung
(6.2) einsetzen und erhalten∫ωe
∇u · ∇v =∫
Ω
∇u · ∇v =∫
Ω
fv +∫
ΓN
g v︸︷︷︸=0
=∫
Ω
fv =∫
ωe
fv
Damit erhalten wir
η2e,E =
32he
[∫ωe
∇(uN − u) · ∇v +∫
K
(f + ΔuN )v +∫
K′(f + ΔuN )v
]
≤ 32he
[‖∇(u− uN )‖L2(ωe)‖∇v‖L2(ωe) + ‖f + ΔuN‖L2(K)‖v‖L2(K) + ‖f + ΔuN‖L2(K′)‖v‖L2(K′)
]≤ C‖∇(u− uN )‖L2(ωe)ηe,E + Che‖f + ΔuN‖L2(K)ηe,E + Che‖f + ΔuN‖L2(K′)ηe,E
Kurzen mit ηe,E und Einsetzen der Abschatzung fur ‖f + ΔuN‖L2(K), ‖f + ΔuN‖L2(K′) aus Lemma 6.7liefert dann die gewunschte Aussage. �
Lemma 6.9 Es existiert eine Konstante C > 0, welche nur von der Formregularitatskonstante γ abhangt,so daß fur alle Kanten e ∈ EN gilt:
he‖g − ∂nuN‖2L2(e) ≤ C
[‖∇(u− uN )‖2
L2(Ke) + h2e‖f − fT ‖2
L2(Ke) + he‖g − gT ‖2L2(e)
],
wobei Ke ∈ T das Element ist mit e ∈ E(Ke).
Beweis: Der Beweis wird ahnlich gefuhrt wie der von Lemma 6.8. Wir setzen
η2e,EN
:= he‖g − ∂nuN‖2L2(e), η2
e,EN:= he‖gT − ∂nuN‖2
L2(e).
Sei be ∈ S2,1(T ) so, daß supp be = Ke und be|e ein quadratisches Polynom ist mit be(m) = 1, wobeim ∈ e der Mittelpunkt von e ist. Wir betrachten die Funktion
v := (gT |e − ∂nuN)be ∈ H10,ΓD
(Ω)
und bemerken supp v ⊂ Ke. Dann ergibt sich wie im Beweis von Lemma 6.8
‖v‖L2(Ke) ≤ Cηe,EN ,
‖∇v‖L2(Ke) ≤ Ch−1e ηe,EN ,
‖∇v‖L2(e) ≤ Cηe,EN .
66

Damit ergibt sich weiter wie im Beweis von Lemma 6.8
η2e,EN
= he‖gT − ∂nuN‖2L2(e) =
32he
∫e
(gT − ∂nuN )v =32he
∫e
(gT − g)v +32he
∫e
(g − ∂nuN)v
=32he
∫e
(gT − g)v +32he
∫e
gv − 32he
[∫Ke
∇uN · ∇v +∫
Ke
ΔuNv
],
wobei der letzte Schritt durch eine partielle Integration entsteht. Weiter konnen wir wegen v ∈ H10 (Ω,ΓD)
wiederum die schwache Formulierung (6.2) verwenden und erhalten aus supp v ⊂ Ke:∫e
gv =∫
ΓN
gv =∫
Ke
∇u · ∇v −∫
Ke
fv
Setzt man dies ein in die obige Darstellung von η2e,EN
, so ergibt sich
η2e,EN
=32he
∫e
(gT − g)v +32he
[∫Ke
∇(u − uN) · ∇v −∫
Ke
(f + ΔuN)v]
≤ Che
[‖g − gT ‖L2(e)‖v‖L2(e) + ‖∇(u− uN )‖L2(Ke)‖∇v‖L2(Ke) + ‖f + ΔuN‖L2(Ke)‖v‖L2(Ke)
]≤ Cηe,EN
[he‖g − gT ‖L2(e) + ‖∇(u− uN )‖L2(Ke) + he‖f + ΔuN‖L2(Ke)
].
Berucksichtigt man nun wiederum Lemma 6.7 zum Abschatzen von ‖f + ΔuN‖L2(Ke) sowie, daß dieDreiecksungleichung ηe,EN ≤ ηe,EN + ‖g − gT ‖L2(e) liefert, so ergibt sich die gewunschte Behauptung. �
6.3 Ein adaptiver Algorithmus
Ziel: konstriere (moglichst einfach) ein Gitter T (mit moglichst wenig Elementen), so daß ‖u− uN‖E ≤TOL ist, wobei TOL eine vorgegebene Genauigkeit ist.
In der Praxis wird man, ausgehend von einer groben Starttriangulierung T0, eine Folge Tn, n = 0,1, . . . von Gittern erzeugen und abbrechen, wenn die gewunschte Genauigkeit erreicht ist. Das GitterTn ergibt sich dabei durch Verfeinerung des Gitters Tn−1. Um zu entscheiden, welche Elemente K desGitters Tn−1 verfeinert werden, macht man die Annahme, daß die Fehlerindikatoren ηK aus (6.12) denFehler auf K gut widerspiegeln, d.h., daß eine Zerlegung der Elemente K, fur die ηK groß ist, auch zueiner starken Reduktion des Gesamtfehlers
∑K∈T η
2K fuhrt. Es ergibt sich damit
1. bestimme FE-Losung uN ∈ S1,1(Tn) ∩H10 (Ω,ΓD)
2. bestimme ηK fur alle K ∈ Tn
3. markiere alle Elemente K als zu verfeinern, fur die ηK “groß” ist
4. erzeuge Tn+1
5. gehe zu 1.
Ein typischer Algorithmus ist in Alg. 3 angegeben.
Bemerkung 6.10 Eine typische Wahl von σ ist σ = 0.75. Man versucht, Qualitat der erzeugten Gitterund Gesamtkosten in ein vernunftiges Verhaltnis zu bringen: Einerseits erreicht man die vorgegebeneToleranz in weniger Schritten des adaptiven Algorithmus, je mehr Elemente in jedem Schritt erzeugtwerden; andererseits erwartet man, daß der Algorithmus umso ineffizienter ist, je mehr Elemente proSchritt verfeinert werden (Extremfall: σ = 0 fuhrt auf uniforme Verfeinerungen). Man beachte: Falls dieProblemgroßenNn (fur Gitter Tn) die Bedingung Nn+1
Nn≥ q > 1 erfullen, dann sind die Gesamtkosten nur
ein (festes) Vielfaches der Kosten, die auf dem akzeptierten Gitter Nν entstehen. Um dies einzusehen,sei Wn der Aufwand zum Bestimmen von uN auf Gitter Tn; wir nehmen an, daß Wn ∼ Nn. Dann gilt:
Wges =ν∑
n=0
Wn ≤ Cν∑
n=0
Nn ≤ Cν∑
n=0
Nνq−(ν−n) ≤ CNν
∞∑n=0
q−n ≤ CNν ∼Wν
67

Algorithm 3 klassischer adaptiver FEM-Algorithmus%input: Startgitter T0, Toleranz TOL, Parameter σ ∈ (0, 1)n := 01: repeat{2: Berechne FEM-Losung uN ∈ S1,1(Tn) ∩H1
0 (Ω,ΓD)3: Berechne fur alle K ∈ Tn die Indikatoren ηK mittels (6.12)4: EST2 :=
∑K∈T η
2K
5: η := maxK∈Tn ηK
6: for K ∈ Tn do7: if ηK > ση then8: markiere K zum Verfeinern9: end if
10: end for11: erzeuge Tn+1, indem alle zum Verfeinern markierten Elemente verfeinert werden und hangende Kno-
ten durch “Gitterabschluß” (siehe Alg. 6.3) beseitigt werden12: n := n+ 113: } until EST < TOL
rotgrun
blau trivial
Abbildung 6.2: Die Verfeinerungsmoglichkeiten rot, grun, blau. Es wird auf jeden Fall eine langste Seitegeteilt.
Wir betrachten nun das Problem des Gitterabschlußes, d.h. der Eliminierung von hangenden Knoten.Die Schwierigkeit besteht darin, sicherzustellen, daß die Gitter Tn, n = 0, 1, . . . ,, formregular bleiben.Dies wird mit Alg. 6.3 erreicht. Zur Vereinfachung nehmen wir an, daß anstelle von Elementen Kantenzur Verfeinerung markiert sind. Dies erreicht man z.B. so:
for K ∈ T do { if K markiert, then ∀e ∈ E(K) markiere e }
Um die Formregularitat der Elemente sicherzustellen, darf ein Element nur nach einer der folgenden 4Regeln verfeinert werden (siehe Fig. 6.2):
rot alle 3 Kanten sind markiert → zerlege in 4 kongruente Dreiecke
grun genau eine Kante ist markiert, welche zudem eine langste Kante ist → zerlege Element in 2 Dreiecke,indem der Mittelpunkt der markierten Kante mit der gegenuberliegenden Ecke verbunden wird.
blau genau 2 Kanten sind markiert und eine langste Kante ist unter den markierten → zerlege Elementin 3 Dreiecke, indem die Mittelpunkte der markierten Kanten verbunden werden und zudem derMittelpunkt der langsten Kante mit der gegenuberliegenden Ecke verbunden wird.
Bemerkung 6.11 Alg. 6.3 ist nicht vollstandig determiniert, da ein Element mehr als eine langste Kantehaben kann.
Ohne Beweis zeigt folgender Satz, daß Alg. 6.3 die Formregularitat der Ausgangstriangulierung erhalt.Wesentlich im Beweis ist, daß bei Verfeinerung immer eine langeste Kante eines Elementes geteilt wird(d.h. insb., daß der kleinste Winkel nicht geteilt wird).
Satz 6.12 Sei T0 ein Gitter. Sei ε > 0 der kleinste Innenwinkel von T0. Sei (Tn)∞n=0 ein Folge vonGittern, die von Alg. 6.3 erzeugt werden (die in jedem Schritt gewahlten Kantenmarkierungen sind
68
Algorithm 4 rot-grun-blau-Abschluß%input: Triangulierung T , bei der die Kanten zur Verfeinerung markiert sind%output: regulares Gitter T ′, das durch Teilen der markierten Kanten und Beseitigung der hangendenKnoten entsteht1: while (∃K ∈ T s.d. mindestens eine Kante von K ist markiert, aber keine langste Kante von K)2: markiere eine langste Kante von K3: erzeuge T ′ durch Anwenden der Rot-, Grun-, Blauverfeinerungen aus Abb. 6.2.
beliebig). Dann gilt: Fur alle n ∈ N ist der kleinste Innenwinkel von Tn nach unten durch ε/2 vonNull weg beschrankt.
Beispiel 6.13−u′′ + u = f auf Ω = (0, 1), u(0) = u(1) = 0.
Die Fehlerindikatoren konnen wie folgt definiert werden:
η2K = h2
K‖f − (−u′′FE + uFE)‖2L2(K).
Die rechte Seite f wird so gewahlt, daß die exakte Losung
u(x) = xα(1 − x), α = 0.75
ist. Die FE-Raume sind gegeben durch S1,10 (T ), wobei die Gitter T mit Hilfe von Alg. 3 erzeugt wird.
Fig. 6.3 zeigt die Gitter in Schritt 10 und 30 sowie das Konvergenzverhalten des Algorithmus.
Beispiel 6.14 Wir betrachten den adaptiven Algorithmus fur das Modellproblem (6.1) mit f ≡ 1,ΓD = ∂Ω auf dem L-Gebiet. Die Folge von erzeugten Gittern ist in Fig. 6.4 dargestellt.
finis 25.Stundefinis 26.Stunde
6.4 Ein aquilibrierter Fehlerschatzer
Der residuale Fehlerschatzer (6.12), (6.14) spiegelt das Verhalten des Fehlers (in der Energienorm) korrektwider—jedoch ist die Konstante C > 0 in der Abschatzung ‖u − uN‖E ≤ CEST unbekannt bzw. in derPraxis zu pessimistisch. Der residuale Fehlerschatzer (6.12), (6.14) eignet sich deshalb zwar gut zumSteuern eines adaptiven Algorithmus, aber nicht so sehr als Abbruchkriterium. Hier stellen wir einenFehlerschatzer vor, der den Fehler ohne Konstante beschrankt.
6.4.1 Fehlerschatzer
Wir erinnern an die Fehlerdarstellung (6.8)
‖u− uN‖E = supv∈H1
0 (Ω,ΓD)
B(u − uN , v)‖v‖E
supv∈H1
0 (Ω,ΓD)
R(v)‖v‖E
,
R(v) = l(v) −B(uN , v) =∫
Ω
fv +∫
ΓN
gv −B(uN , v)
Motivation: Wir “leiten” nun eine Gleichung fur den elementweisen Fehler e|K := (u− uN)|K her. Seienhierzu
BK(w, v) :=∫
K
∇w · ∇v
RK(v) :=∫
K
fv +∫
∂K∩ΓN
gv −BK(uN , v).
Weiter bemerken wir, daß die Losung u (falls u hinreichend glatt ist) die Gleichung
BK(u, v) =∫
K
fv +∫
∂K
∂nuv ∀v ∈ H1(K)
69
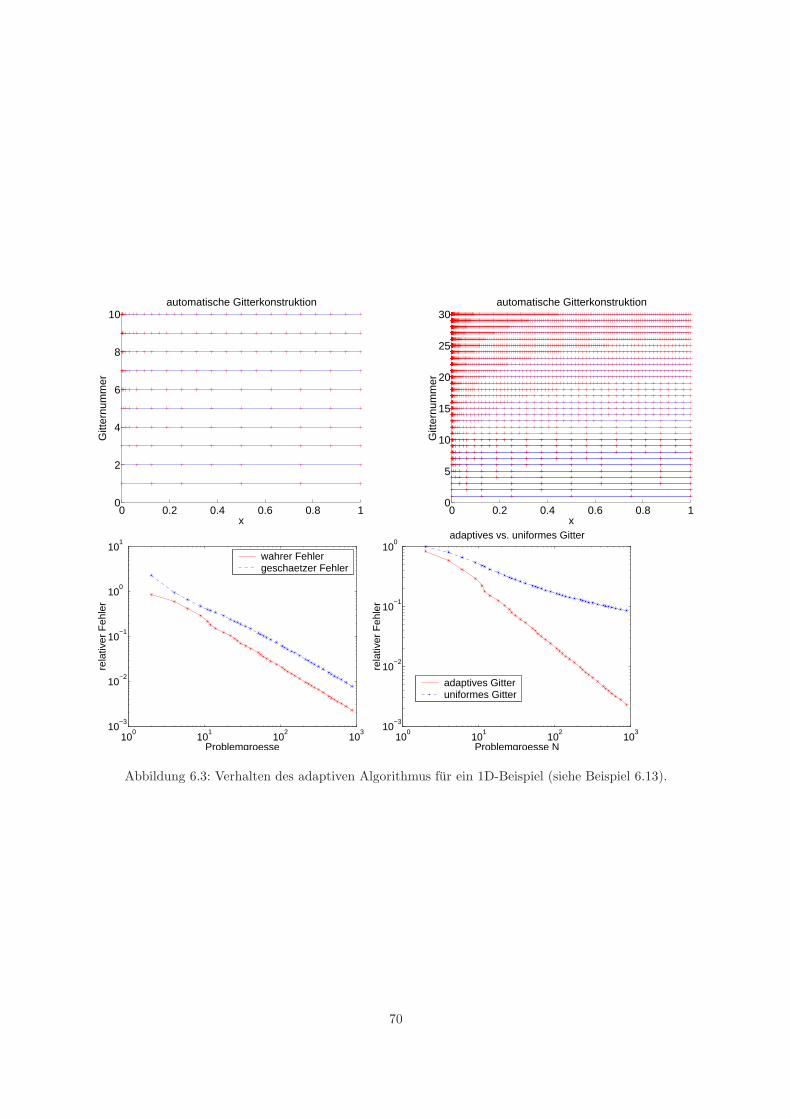
0 0.2 0.4 0.6 0.8 10
2
4
6
8
10automatische Gitterkonstruktion
x
Gitt
ernu
mm
er
0 0.2 0.4 0.6 0.8 10
5
10
15
20
25
30automatische Gitterkonstruktion
x
Gitt
ernu
mm
er
100
101
102
103
10−3
10−2
10−1
100
101
rela
tiver
Feh
ler
Problemgroesse
wahrer Fehler geschaetzer Fehler
100
101
102
103
10−3
10−2
10−1
100
adaptives vs. uniformes Gitter
rela
tiver
Feh
ler
Problemgroesse N
adaptives Gitteruniformes Gitter
Abbildung 6.3: Verhalten des adaptiven Algorithmus fur ein 1D-Beispiel (siehe Beispiel 6.13).
70
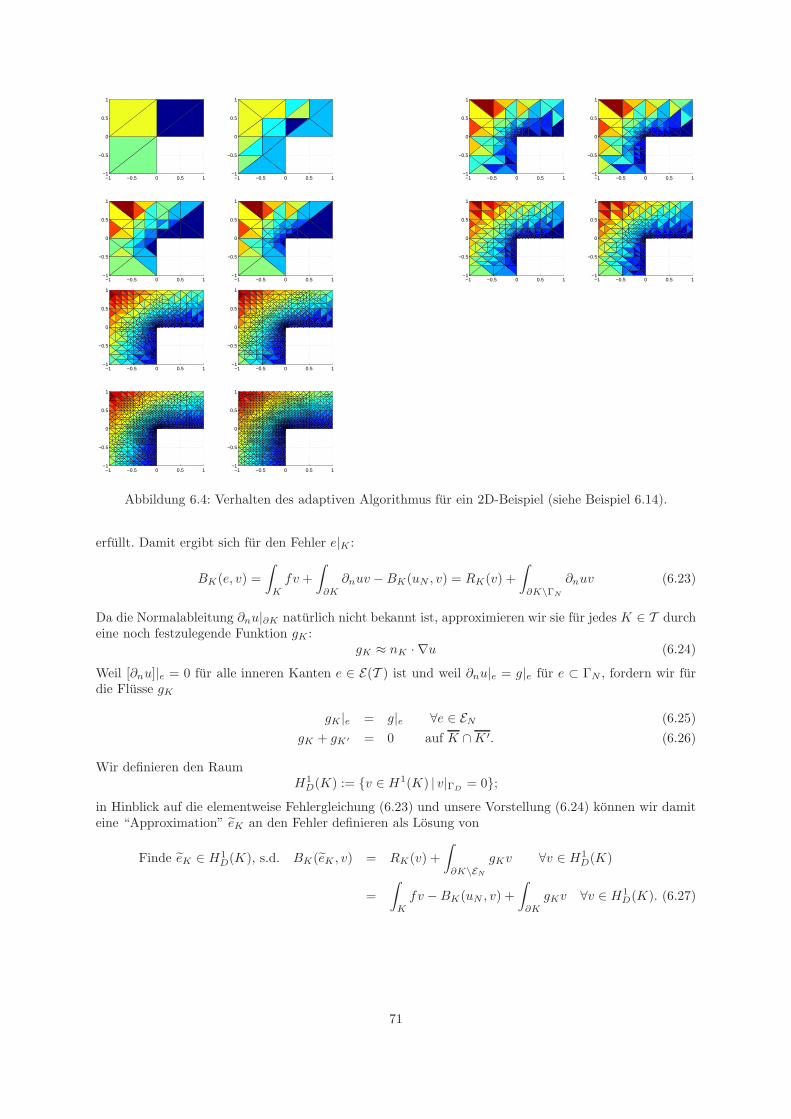
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
−1 −0.5 0 0.5 1−1
−0.5
0
0.5
1
Abbildung 6.4: Verhalten des adaptiven Algorithmus fur ein 2D-Beispiel (siehe Beispiel 6.14).
erfullt. Damit ergibt sich fur den Fehler e|K :
BK(e, v) =∫
K
fv +∫
∂K
∂nuv −BK(uN , v) = RK(v) +∫
∂K\ΓN
∂nuv (6.23)
Da die Normalableitung ∂nu|∂K naturlich nicht bekannt ist, approximieren wir sie fur jedes K ∈ T durcheine noch festzulegende Funktion gK :
gK ≈ nK · ∇u (6.24)
Weil [∂nu]|e = 0 fur alle inneren Kanten e ∈ E(T ) ist und weil ∂nu|e = g|e fur e ⊂ ΓN , fordern wir furdie Flusse gK
gK |e = g|e ∀e ∈ EN (6.25)gK + gK′ = 0 auf K ∩K ′. (6.26)
Wir definieren den RaumH1
D(K) := {v ∈ H1(K) | v|ΓD = 0};in Hinblick auf die elementweise Fehlergleichung (6.23) und unsere Vorstellung (6.24) konnen wir damiteine “Approximation” eK an den Fehler definieren als Losung von
Finde eK ∈ H1D(K), s.d. BK(eK , v) = RK(v) +
∫∂K\EN
gKv ∀v ∈ H1D(K)
=∫
K
fv −BK(uN , v) +∫
∂K
gKv ∀v ∈ H1D(K). (6.27)
71

Falls eK existiert2 konnen wir abschatzen:
R(v) =∑K∈T
RK(v)(6.26)=
∑K∈T
RK(v) +∫
∂K\ΓN
gKv =∑K∈T
BK(eK , v) ≤∑K∈T
‖∇eK‖L2(K)‖∇v‖L2(K)
≤√ ∑
K∈T‖∇eK‖2
L2(K)
√ ∑K∈T
‖∇v‖2L2(K)
Damit ist ‖u− uN‖E = ‖e‖E = supv∈H10 (Ω,ΓD)
R(v)‖v‖E
≤ ESTeq mit
ESTeq :=√ ∑
K∈T‖∇eK‖2
L2(K) (6.28)
Wir halten das Ergebnis im folgenden Satz fest:
Satz 6.15 Fur jedes K ∈ T sei eine (auf ∂K definierte Funktion) gK gewahlt, die die Bedingungen(6.25), (6.26) erfullt. Falls es fur jedes Element K ∈ T eine Losung eK von (6.27) gibt, so erfullt derFehlerschatzer ESTeq aus (6.28) die Abschatzung ‖u− uN‖E ≤ ESTeq.
Bemerkung 6.16 Die Funktionen eK mussen als Losungen der lokalen Hilfsprobleme (6.27) bestimmtwerden. In der Praxis kann man diese wiederum nur approximieren, z.B. als Losungen von
Finde e′K ∈ VK : BK(e′K , v) = RK(v) +∫
∂K\ΓN
gKv ∀v ∈ VK , (6.29)
wobei VK ⊂ H1D(K) geeignet gewahlt ist, z.B. als Raum von Polynomen hoherer Ordnung (z.B. p = 2
oder p = 3).
6.4.2 Wahl der Flußfunktionen gK
Struktur der gK
Die Flußfunktionen gK mussen die Bedingungen (6.25), (6.26) erfullen. Weitere Bedingungen ergebensich aus der Forderung nach Losbarkeit von (6.27). Wir hatten zudem die Forderung (6.24) als sinnvollerarbeitet. Die Losbarkeit von (6.27) erfordert, daß fur die Elemente K ∈ T , die “nicht am Dirichletrandsind” (genauer: |∂K ∩ ΓD| = 0), die Kompatibilitatsbedingung
0 = RK(1) +∫
∂K\ΓN
gK1 (6.30)
=∫
K
f1 −B(uN , 1) +∫
∂K
gK1 =∫
K
(f + ΔuN )1 +∫
∂K
(gK − ∂nuN )1
erfullt ist. Wir beobachten nun:
1. Bisher forderten wir von den Funktionen gK lediglich die Bedingungen (6.25), (6.26), (6.30)—diese 3 Bedingungen legen die Funktionen gK nicht fest, und wir mussen (und konnen!) weitereBedingungen an die Funktionen gk stellen.
2. Die zusatzlichen Bedingungen an die Funktionen gK dienen auch dazu, die Funktionen gK lokalfestlegen zu konnen—eine nichttriviale Forderung, denn (6.26) koppelt ja die Fluße benachbarterElemente.
2Existenz von eeK tritt nur als Problem auf, wenn |∂K ∩ ΓD | = 0, denn dann ist H1D(K) = H1(K) und BK ist nicht
koerziv auf H1(K). In diesem Fall ist das Problem (6.27) ein Neumannproblem ohne Absolutterm wie in Abschnitt 4.9genauer diskutiert: Partielle Integration zeigt, daß eeK das folgende Randwertproblem lost: −ΔeeK = (f +ΔuN ) auf K und∂neeK = gK − ∂nuN auf ∂K. Aus Abschnitt 4.9 wissen wir, daß die rechte Seite von (6.27) die Kompatibilitatsbedingung0 = RK(1) +
R∂K\EN
gK1 erfullen muß.
72

Um die Flußfunktionen gK festzulegen, machen wir einen Strukturansatz. Wir betrachten hier den An-satz, daß die Funktionen gK auf jeder Kante (die nicht auf dem Neumannrand ΓN liegt) ein Polynomvom Grad 1 sind (gK muß aber nicht auf ∂K stetig sein!):
{gK |e = g ∀e ∈ E(K) ∩ EN
gK |E ∈ span{ϕV |e |V ∈ N (e)} ∀e ∈ E(K) \ EN .(6.31)
Es wird sich als zweckmaßig herausstellen, die Momente μeK,V ∈ R einzufuhren:
μeK,V :=
∫e
ϕV gK V ∈ N (e). (6.32)
Wir bemerken, daß Kenntnis der Momente μeK,V , V ∈ N (e) reicht, um die gK festzulegen:
Beispiel 6.17 Sei e ∈ E(K) \ EN . Aus dem Ansatz (6.31) folgt gK |e = α1ϕV1 +α2ϕV2 , wobei {V1, V2} =N (e) die beiden Endpunkte von e sind. Fur die Momente μe
K,V1, μe
K,V2folgt dann aus der Definition
(6.32)(μe
K,V1
μeK,V2
)= Me
(α1
α2
), Me =
( ∫e|ϕV1 |2
∫eϕV1ϕV2∫
e ϕV1ϕV2
∫e |ϕV2 |2
)=he
6
(2 11 2
)
Die Massematrix Me ist invertierbar mit Inverser M−1e = 2
he
(2 −1−1 2
), weshalb sich die benotigten
Koeffizienten α1, α2 aus dem Momenten μeK,V1
, μeK,V2
bestimmen lassen.
Festlegen der Momente
Nachdem wir die Form der Flußfunktionen gK durch den Ansatz (6.31) festgelegt haben und gesehenhaben, daß diese durch die Momente μe
K,V eindeutig bestimmt sind, stellen wir nun Gleichungen fur dieMomente μe
K,V auf. Unser Vorgehen wird dabei sein, fur jeden festen Knoten V ∈ N (T ) die Momenteμe
K,V fur die Kanten e und Elemente K zu bestimmen, fur die V ∈ N (e) und V ∈ N (K). Es wird sichherausstellen, daß dies als Losung eines kleinen LGS moglich ist.
Die Strukturannahme (6.31) zusammen mit den Bedingungen (6.25), (6.26) und (6.30) legt die Funk-tionen gK immer noch nicht fest. Um weitere Bedingungen zu erhalten, betrachten wir wiederum dieKompatibilitatsbedingung (6.30). Wir verscharfen sie in zwei Arten: zum einen fordern wir eine solcheBedingung fur alle Elemente K und zum anderen fordern wir, daß v �→ RK(v) +
∫∂K\ΓN
gKv nicht nurfur alle v ∈ P0, sondern auch fur alle v ∈ P1 verschwindet. Mit anderen Worten: Wir fordern
∀K ∈ T ∀V ∈ N (K) : 0 = RK(ϕV ) +∫
∂K\ΓN
gKϕV (6.33)
(6.33) impliziert (6.30), denn∑
V ∈N (K) ϕV ≡ 1 auf K.3 Eine zu (6.33) aquivalente Forderung ist “kno-tenorientiert”:
∀V ∈ T ∀K ∈ N (T ) mit V ∈ N (K): 0 = RK(ϕV )+∫
∂K\ΓN
gKϕV =∫
K
fϕV −BK(uN , ϕV )+∫
∂K
gKϕV
(6.34)Wir bemerken, daß fur jeden Knoten V ∈ N (T ) genau einer der folgenden vier Falle auftritt (vgl.Fig. 6.5):
1. V ist ein innerer Knoten (“I”),
2. V ist ein Randknoten, an dem zwei Neumannkanten anstoßen (“NN”),
3. V ist ein Randknoten, an dem eine Neumannkante und eine Dirichletkante anstoßen (“ND”),
3Man nennt (6.30) auch die Equilibrierungsbedingung “nullter Ordnung”, weil das Funktional v �→ RK(v)+R
∂K\ΓNgKv
auf dem Raum P0 verschwinden muß; die Bedingung (6.33) heißt analog Equilibrierungsbedingung “erster Ordnung”, weildas Funktional auf P1 verschwinden muß.
73

4. V ist ein Randknoten, an dem zwei Dirichletkanten anstoßen (“DD”).
Wir fassen nun die Bedingungen an die Momente μeK,V zusammen, die wir formuliert haben: Sei V ∈
N (T ) fest. Seien K1, . . . ,Kn die n Elemente, die an den Knoten V anstoßen (siehe Fig. 6.5). Dann habenwir bis jetzt folgende Bedingungen an die Momente μe
K,V fur dieses feste V erhalten:
• Die Forderung (6.34) ergibt n Gleichungen (1 pro Element Ki, i = 1, . . . , n, im Patch ωV )
• Die Forderung (6.26) ergibt 1 Gleichung pro innere Kante
• Fur Kanten e ⊂ EN ist gK (und damit die Momente) bereits festgelegt.
• Fur Kanten e ⊂ ED gibt es keine Bedingungen an die Momente.
Ausgeschrieben als Gleichungssystem ergibt sich: Die Bedingung (6.34) liefert −(∫
KfϕV − BK(uN , ϕV )
)=∫
∂K gKϕV fur alle K ⊂ ωV , d.h. fur jedes Element Ki, i = 1, . . . , n, des Patches ωV :
−(∫
Ki
fϕV −BKi(uN , ϕV ))
= μei
Ki,V+ μ
ei+1Ki,V
i = 1, . . . , n. (6.35a)
Weiter liefert (6.26) die Bedingung
μei
Ki,V+ μei
Ki+1,V = 0
{i = 1, . . . , n im Fall “I”i = 2, . . . , n in den Fallen “NN”, “ND”, “DD”
(6.35b)
Zudem sind durch (6.25) festgelegt⎧⎪⎪⎪⎨⎪⎪⎪⎩
Fall “I”: —Fall “NN”: μe1
K1,V , μen+1Kn,V
Fall “ND”: μen+1Kn,V
Fall “DD”: —
(6.35c)
Dies fuhrt je nach Fall auf eine unterschiedliche Anzahl von Bedingungen— Tabelle 6.1 stellt die ver-schiedenen Falle zusammen. Ohne die in Tabelle 6.1 aufgestellten Behauptungen uber die Losbarkeitbzw. eindeutige Losbarkeit im einzelnen uberprufen zu wollen (siehe Ubung 6.19 fur den Fall “I”), wollenwir nur auf den Fall “ND’ naher eingehen: Der Fall “ND” wirkt uberbestimmt (mehr Gleichungen alsUnbekannte)—dennoch existiert eine Losung aufgrund der Galerkinorthogonalitat der Losung uN , wiedie folgende Bemerkung zeigt:
Bemerkung 6.18 Im Fall “NN” existiert eine Losung von (6.35). Hierzu schreiben wir das System alsAμ = f , wobei
A =
⎛⎜⎜⎜⎜⎜⎜⎜⎝
1 01 10 1 1
. . . . . .1 1
1
⎞⎟⎟⎟⎟⎟⎟⎟⎠
∈ R2n+1×2n, f =
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
∫e1gK1ϕV
−(∫
K1fϕV −BK1(uN , ϕV )
)0
−(∫
K2fϕV −BK2(uN , ϕV )
)0...0∫
en+1gKnϕV
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
∈ R2n+1.
Dieses Gleichungssystem hat eine Losung, falls f ⊥ KerA� (Dies folgt aus der linearen Algebra4.) Eineeinfache Rechnung zeigt, daß
KerA� = span{k}, k =(
1 −1 1 −1 · · · −1 1)� ∈ R2n
4Beh.:Ax = f losbar ⇐⇒ f ⊥ KerA�. Man zeigt dies in mehreren Schritten. 1. Schritt: Es gilt R(A) ⊂ (KerA�)⊥, dennv ∈ KerA� impliziert 〈Ax, v〉 = 〈x, A�v〉 = 0. Dies impliziert insbesondere den “=⇒” Teil der Behauptung. 2. Schritt:Es gilt R(A) = (Ker�)⊥. Um dies zu sehen, nutzen wir, daß R(A) ein abgeschlossener Teilraum von (Ker�)⊥ ist. Seif ∈ (KerA�)⊥ mit f ⊥ R(A). Dann ist 0 = 〈Ax, f〉 = 〈x, A�f〉 fur alle x. Also ist f ∈ KerA� ∩ (KerA�)⊥ = {0}. Damitist R(A) = (KerA�)⊥.
74

Ve1 = en+1K1
e2
K2
en
KnV e1
K1
e2
K2en
Kn
en+1
⊂ ΓN⊂ ΓN
Ve1K1
e2
K2en
Kn
en+1
⊂ ΓN⊂ ΓD
V e1K1
e2
K2en
Kn
en+1
⊂ ΓD⊂ ΓD
Abbildung 6.5: Fur die Bestimmung der Momente μeK,V , die an einem festen Knoten V ∈ N (T ) hangen
gibt es 4 Falle: ein innerer Knoten (“Fall I”), ein Randknoten, an dem zwei Neumannkanten anstoßen(Fall “NN”), ein Randknoten, an dem eine Neumann- und eine Dirichletkante anstoßen (“Fall DD”) undein Randknoten, an dem zwei Dirichletknoten anstoßen (“Fall DD”).
Fall # Elemente # innere # Momente # Momente, die # Glei- losbar? Lsg.Kanten bereits festliegen chungen eindeutig?
innerer Knoten n n 2n 0 2n ja neinNeumann-Neumann n n − 1 2n 2 2n + 1 ja jaNeumann-Dirichlet n n − 1 2n 1 2n ja jaDirichlet-Dirichlet n n − 1 2n 0 2n − 1 ja nein
Tabelle 6.1: Losbarkeit von (6.35).
Wir berechnen k · f :
k · f =n∑
k=1
∫Ki
fϕV −BKi(uN , ϕV )+∫
e1
gK1ϕV +∫
en+1
gKnϕV = l(ϕV )−B(uN , ϕV ) = R(ϕV ) Galerkin= 0
Damit ist die Losbarkeit der der Momentengleichungen (6.35) in allen 4 Fallen gesichert. Da Eindeutigkeitnicht immer gegeben ist, mussen noch weitere Bedingungen gestellt werden. Hierzu erinnern wir uns andie Forderung (6.24); in Ermangelung der genauen Kenntnis von n · ∇u fordern wir, daß die Momenteμe
K,V moglichst nah an
μeK,V :=
∫e
ϕV nK · ∇uN (6.36)
sind. Damit ergeben sich fur jeden Knoten V ∈ N (T ) die Momente μeK,V , K ⊂ ωV als eindeutige
Losungen des Minimierungsproblems
Minimiere12
∑K⊂ωV
∑e∈E(K):V ∈N (e)
|μeK,V − μe
K,V |2 unter den Nebenbedingungen (6.35). (6.37)
Die Minimierungsaufgabe (6.37) kann naturlich auch als LGS formuliert werden—der Fall eines innerenKnotens ist der Inhalt der folgenden Ubungsaufgabe.
Ubung 6.19 (Siehe Appendix.) Betrachten Sie den Fall eines inneren Knotens V ∈ Ω. Zeigen Sie:
a) Im vorliegenden Fall “I” stellt (6.35) ein unterbestimmtes LGS dar; der Kern der zugehorigenMatrix hat Dimension 1.
75

b) Geben Sie den Kern an.
c) Formulieren Sie ein LGS zur Losung von (6.37). Zeigen Sie, daß dieses vollen Rang hat.
Der oben konstruierte Fehlerschatzer stellt eine obere Schranke fur den wahren Fehler ‖u − uN‖E dar.Zugleich uberschatzt er den Fehler nicht zu sehr, wie das folgende Resultat zeigt:
Satz 6.20 Gelte Voraussetzung 6.1. Dann existiert ein C > 0, welches nur von γ und ΓD abhangt, sodaß
(ESTeq)2 ≤ C
[‖u− uN‖2
E +∑K∈T
h2K‖f − fT ‖2
L2(K) +∑
e∈EN
he‖g − gT ‖2L2(e)
],
wobei wie in Satz 6.6 die stuckweise konstanten Funktionen fT und gT definiert sind als fT |K = 1|K|
∫Kf
und gT |e = 1|e|
∫e g.
Beweis: Siehe [1]. �
6.5 Mittelungsbasierte Fehlerschatzer
Bei Ingenieuren sehr beliebt sich auch “mittelungsbasierte Fehlerschatzer”, oft auch einfach ZZ (“Zienkiewicz-Zhu”)-Fehlerschatzer genannt. Wesentliche Idee ist, durch (lokale) Projektion des Flusses ∇uN ∈ (S0,0(T ))2
auf (S1,1(T ))2 eine bessere Approximation qN ∈ (S1,1(T ))2 an ∇u zu erhalten. Der Fehlerschatzer ergibtsich dann als ‖∇uN − qN‖L2(Ω).
Der Einfachheit halber betrachten wir den Fall ΓN = ∅, also
−Δu = f auf Ω, u| = 0 auf ∂Ω. (6.38)
Sei uN ∈ S1,10 (T ) die FEM-Approximation an die Losung von (6.38). Wir definieren
η2M,Z := inf
qN∈(S1,1(T ))2‖∇uN − qN‖2
L2(Ω) (6.39)
η2M,Z(K) := ‖∇uN − q∗
N‖2L2(K) q∗
N ist der Minimierer aus (6.39) (6.40)
η2Z,A := ‖∇uN −A∇uN‖2
L2(Ω) (6.41)
η2Z,A(K) := ‖∇uN −A∇uN‖2
L2(K) (6.42)
wobei der Mittelungsoperator A definiert ist als
A : (L2(Ω))2 → (S1,1(T ))2, q →∑
V ∈N (T )
ϕV1
|ωV |
∫ωV
q. (6.43)
Bemerkung 6.21 Das Auswerten von ηM,Z erfordert immer noch das Losen eines globalen Gleichungs-systems und wird deshalb in der Praxis nicht gemacht. Der clementartige Mittelungsoperator A ist lokalund wird deshalb viel verwendet.
Satz 6.22 (Effizienz von ηM,Z)
ηM,Z ≤ ‖∇(u− uN)‖L2(Ω) + minq∈(S1,1(T ))2
‖∇u− q‖L2(Ω).
Beweis: Sei q ∈ (S1,1(T ))2 beliebig. Dann gilt:
‖∇uN − q∗N‖L2(Ω) ≤ inf
q∈(S1,1(T ))2‖∇uN − q‖L2(Ω) ≤ inf
q∈(S1,1(T ))2‖∇(u− uN)‖L2(Ω) + ‖∇u− q‖L2(Ω).
�
76

Bemerkung 6.23 In der Praxis ist der Term minq∈(S1,1(T ))2 ‖∇u−q‖L2(Ω) klein im Vergleich zu ‖∇(u−uN)‖L2(Ω), weil ∇u (bis auf einige Singularitaten) glatt ist.
Die Zuverlassigkeit von ηM,Z ist schwieriger zu zeigen. Um sie zu zeigen, benotigen wir eine Variante desClementinterpolanten aus Satz 6.3: Ein wesentliches Hilfsmittel des Beweises ist Clementinterpolant, derzusatzlich zu den Approximationseigenschaften aus Satz 6.3 folgende Orthgonalitatseigenschaft hat:
Lemma 6.24 (Clement-Interpolant mit zusatzlicher Orthogonalitatseigenschaft) Es gelten dieVoraussetzungen von Satz 6.3. Sei ΓD = ∂Ω. Dann kann der Interpolationsoperator I : H1
0 (Ω) → S1,10 (T )
so gewahlt werden, daß die in Satz 6.3 genannten Approximationseigenschaften gelten und zudem fur je-des f ∈ L2(Ω) und w ∈ H1
0 (Ω) gilt:∣∣∣∣∫
Ω
f(w − Iw)∣∣∣∣ ≤ C‖∇w‖L2(Ω)
√ ∑V ∈N (T )∩Ω
h2V min
fV ∈R
‖f − fV ‖2L2(ω′
V ), (6.44)
wobeiω′
V := ωV ∪⋃
V ′∈N (T )∩∂Ω∩ωV
ωV ′ .
Mithilfe des in Lemma 6.24 konstruierten Clementinterpolanten kann nun die Zuverlassigkeit des Mitte-lungsfehlerschatzers gezeigt werden:
Satz 6.25 Es existiert C > 0, so daß
‖∇(u− uN)‖L2(Ω) ≤ C
⎡⎣ηM,Z +
√ ∑V ∈N (T )∩Ω
h2V inf
fV ∈R
‖f − fV ‖2L2(ω′
V )
⎤⎦ .
Bemerkung 6.26 Bevor wir uns dem Beweis von Satz 6.25 zuwenden, bemerken wir, daß fur “glat-te” rechte Seiten f der Term
√∑V ∈N (T )∩Ω h
2V inffV ∈R ‖f − fV ‖2
L2(ω′V ) einen Term “hoherer Ordnung”
darstellt. Ist f ∈ H1(Ω), so erwarten wir∑
V ∈N (T )∩Ω
h2V inf
fV ∈R
‖f − fV ‖2L2(ω′
V ) ≤ C∑
V ∈N (T )∩Ω
h4V ‖∇f‖2
L2(ω′V ) ≤ Ch4‖f‖2
H1(Ω),
wobei h = maxK∈T hK . Also liefert Satz 6.25
‖∇(u− uN )‖L2(Ω) ≤ C[ηM,Z + h2‖f‖H1(Ω)
].
Fur in der Praxis auftretenden Losungen u und Gitter erwarten wir ‖∇(u− uN )‖L2(Ω) ≥ Ch.
Beweis von Satz 6.25: Fur beliebiges w ∈ H10 (Ω) und q ∈ (S1,1(T ))2 erhalten wir
∫Ω
∇(u− uN) · ∇w =∫
Ω
∇(u− uN ) · ∇(w − Iw) =∫
Ω
(∇u− q) · ∇(w − Iw) +∫
Ω
(q −∇uN) · ∇(w − Iw)
Fur den zweiten Term verwenden wir die Cauchy-Schwarzsche Ungleichung, fur den ersten partielleIntegration∣∣∣∣
∫Ω
(∇uN − q) · ∇(w − Iw)∣∣∣∣ ≤ ‖∇uN − q‖L2(Ω)‖∇(w − Iw)‖L2(Ω) ≤ C‖∇uN − q‖L2(Ω)‖∇w‖L2(Ω)∫
Ω
(∇u − q) · ∇(w − Iw) = −∫
Ω
∇ · (∇u − q)(w − Iw) =∫
Ω
(f + ∇ · q)(w − Iw)
=∫
Ω
f(w − Iw) +∑K∈T
∫K
∇ · q(w − Iw).
77

Fur den ersten Term verwenden wir nun (6.44) und erhalten∣∣∣∣∫
Ω
f(w − Iw)∣∣∣∣ ≤ C
√ ∑V ∈N (T )∩Ω
h2V inf
fV ∈R
‖f − fV ‖2L2(ω′
V )‖∇w‖L2(Ω);
aus dem zweiten Term wollen wir wieder einen Term der Form ‖∇uN−q‖L2(Ω) erzeugen. Hierzu bemerkenwir, daß uN ∈ S1,1(T ) impliziert, daß ∇·∇uN |K = 0 fur jedes K ∈ T . Also erhalten wir fur jedes K ∈ T∣∣∣∣
∫K
∇ · q(w − Iw)∣∣∣∣ =
∣∣∣∣∫
K
∇ · (q −∇uN )(w − Iw)∣∣∣∣ ≤ ‖∇ · (q −∇uN )‖L2(K)‖w − Iw‖L2(K)
Die Approximationseigenschaften des Clementinterpolanten liefern ‖w − Iw‖L2(K) ≤ ChK‖∇w‖L2(eωK);die Tatsache, daß q ∈ S1,1(T ))2 erlaubt uns, die inverse Ungleichung
‖∇ · (q −∇uN )‖L2(K) ≤ Ch−1K ‖q−∇uN‖L2(K)
anzuwenden. Damit ergibt sich
∑K∈T
∣∣∣∣∫
K
∇ · q(w − Iw)∣∣∣∣ ≤ C
∑K∈T
‖q−∇uN‖L2(K)‖∇w‖L2(eωK) ≤ C‖q −∇uN‖L2(Ω)‖∇w‖L2(Ω),
wobei im letzten Schritt wiederum die Cauchy-Schwarzsche Ungleichung fur Summen Anwendung fand.Fassen wir die obigen Abschatzungen zusammen, so erhalten wir fur beliebiges w ∈ H1
0 (Ω) und beliebigesq ∈ (S1,1(T ))2
∣∣∣∣∫
Ω
∇(u− uN ) · ∇w∣∣∣∣ ≤ C‖∇w‖L2(Ω)
⎡⎣‖∇uN − q‖L2(Ω) +
√ ∑V ∈N (T )∩Ω
h2V inf
fV ∈R
‖f − fV ‖2L2(ω′
V )
⎤⎦
Daraus ergibt sich die Behauptung. �
Beweis von Lemma 6.24: Wir werden unten den Operator I explizit konstruieren. Beim Beweis desLemmas werden wir uns jedoch auf den Beweis der Abschatzung (6.44) beschrankten—die Approxima-tionseigenschaften von I folgen mit Argumenten, die denen des Beweises von Satz 6.3 ahneln.1. Schritt: Wesentliches Hilfsmittel ist eine Partition der Eins (ψV )V ∈N (T )∩Ω, bei der die meisten Funk-tionen ψV mit den Hutfunktionen ϕV ubereinstimmen. Genauer: fur jeden Randknoten V ∈ N (T ) ∩ ∂Ωwahle man (willkurlich) einen inneren Knoten I(V ), der sich mit V ein Dreieck teilt, d.h. I(V ) erfullt
∃K ∈ T s.d. V ∈ N (K) und I(V ) ∈ N (K)
Weiter definieren wir fur innere Knoten V ∈ N (T ) ∩ Ω die Funktionen ψV durch
ψV := ϕV +∑
z∈N (T ):V =I(z)
ϕz.
Wir bemerken, daß ψV �= ϕV nur fur die Knoten in Randnahe gelten kann; weiter bemerken wir, daßsuppψV ⊂ ω′
V .2. Schritt: Wir definieren den Operator I durch
Iw :=∑
V ∈N (T )∩Ω
ϕV lV (w), lV (w) :=
∫Ω ψV w∫Ω ϕV
3. Schritt: Wir behaupten nun, daß
‖ψVw − ϕV lV (w)‖L2(Ω) ≤ ChV ‖∇w‖L2(ω′V ). (6.45)
Um dies einzusehen, betrachten wir die Falle ψV = ϕV und ψV �= ϕV getrennt. Sei zuerst ψV = ϕV .Dann ist
lV (w) =
∫ωV
ϕV w∫ωV
ϕV
78

Weiter ist lV ein lineares Funktional, fur welches lV (1) = 1 gilt. Damit konnen wir fur den MittelwertwV := 1
|ωV |∫
ωVw abschatzen:
‖ψVw − ϕV lV (w)‖L2(Ω) = ‖ϕV (w − lV (w))‖L2(ωV ) = ‖ϕV ((w − wV ) − lV (w − wV ))‖L2(ωV ).
Weil |ϕV | ≤ 1 gilt, folgt |ϕV | ≤√|ϕV |. Somit wollen wir
‖√ϕV (z − lV (z))‖L2(ωV ), z := w − wV
abschatzen. Um die Struktur des Vorgehens besser zu sehen, fuhren wir die (positiv semidefinite) Bili-nearform 〈u, v〉ϕ :=
∫Ω ϕV uv ein. Wir bemerken, daß lV so definiert ist, daß die Orthogonalitat
〈z − lV (z), 1〉ϕ = 0
gilt. Damit ergibt sich
‖√ϕV (z − lV (z))‖2L2(ωV ) = 〈z − lV (z), z − lV (z)〉ϕ = 〈z, z − lV (z)〉ϕ ≤ ‖z‖ϕ‖z − lV (z)‖ϕ,
was wiederum
‖√ϕV (z − lV (z))‖L2(ωV ) ≤ ‖√ϕV z‖L2(ωV ) ≤ ‖z‖L2(ωV ) = ‖w − wV ‖L2(ωV )
nach sich zieht. Wenn man wie im Beweis von Satz 6.3 argumentiert5, dann ergibt sich ‖w−wV ‖L2(ωV ) ≤ChV ‖∇w‖L2(ωV ), wobei die Konstante C > 0 nur von der Formregularitatskonstante des Gitters abhangt.Damit hatten wir (6.45) fur den Fall ψV = ϕV gezeigt.
Wir betrachten nun den Fall ψV �= ϕV . In diesem Fall besteht ∂ω′V ∩∂Ω aus mindestens einer Kante.
Durch Argumente wie im Beweis von Satz 6.3 kann man nun die Voraussetzung w ∈ H10 (Ω) ausnutzen,
um zu schließen6
‖w‖L2(ω′V ) ≤ ChV ‖∇w‖L2(ω′
V ). (6.46)
Damit ergibt sich mit der Formregularitat des Gitters
‖ψVw − ϕV lV (w)‖L2(Ω) = ‖ψVw − ϕV lV (w)‖L2(ω′V ) ≤ ‖ψVw‖L2(ω′
V ) + ‖ϕV lV (w)‖L2(ω′V )
≤ ‖w‖L2(ω′V ) +
√|ω′
V ||lV (w)| ≤ ChV ‖∇w‖L2(ω′V ) +
√|ω′
V |‖ψV ‖L2(ω′
V )‖w‖L2(ω′V )
‖ϕV ‖L1(ω′V )
Nun ist ‖ϕV ‖L1(ω′V ) ∼ h2
V und |ω′V | ∼ h2
V und ‖ψV ‖L2(ω′V ) ∼ hV . Damit ergibt sich mit Hilfe von (6.46)
die gewunschte Behauptung (6.45) auch im Falle ψV �= ϕV .4. Schritt: Sei f ∈ L2(Ω). Um die im Lemma behauptete Abschatzung zu zeigen, nutzen wir aus, daßdie Funktionen ψV eine Partition der Eins liefern. Sei weiter fur jeden inneren Knoten V ∈ N (T ) ∩ Ωein fV ∈ R gewahlt. Dann gilt:
∣∣∣∣∫
Ω
f(w − Iw)∣∣∣∣ =
∣∣∣∣∣∣∫
Ω
f∑
V ∈N (T )∩Ω
ψV w − ϕV lV (w))
∣∣∣∣∣∣ =
∣∣∣∣∣∣∑
V ∈N (T )∩Ω
∫Ω
f(ψVw − ϕV lV (w))
∣∣∣∣∣∣=
∣∣∣∣∣∣∑
V ∈N (T )∩Ω
∫Ω
(f − fV )(ψV w − ϕV lV (w))
∣∣∣∣∣∣ ≤∑
V ∈N (T )∩Ω
‖f − fV ‖L2(ω′V )‖(ψVw − ϕV lV (w)‖L2(ω′
V )
Verwendet man nun (6.45) sowie die Cauchy-Schwarzsche Ungleichung fur Summen, so ergibt sich diegewunschte Behauptung des Lemma. �
5im Fall von regelmaßigen Gittern entspricht dies der 2. Poincare-Ungleichung6von der Idee her ist dies die 1. Poincare-Ungleichung
79
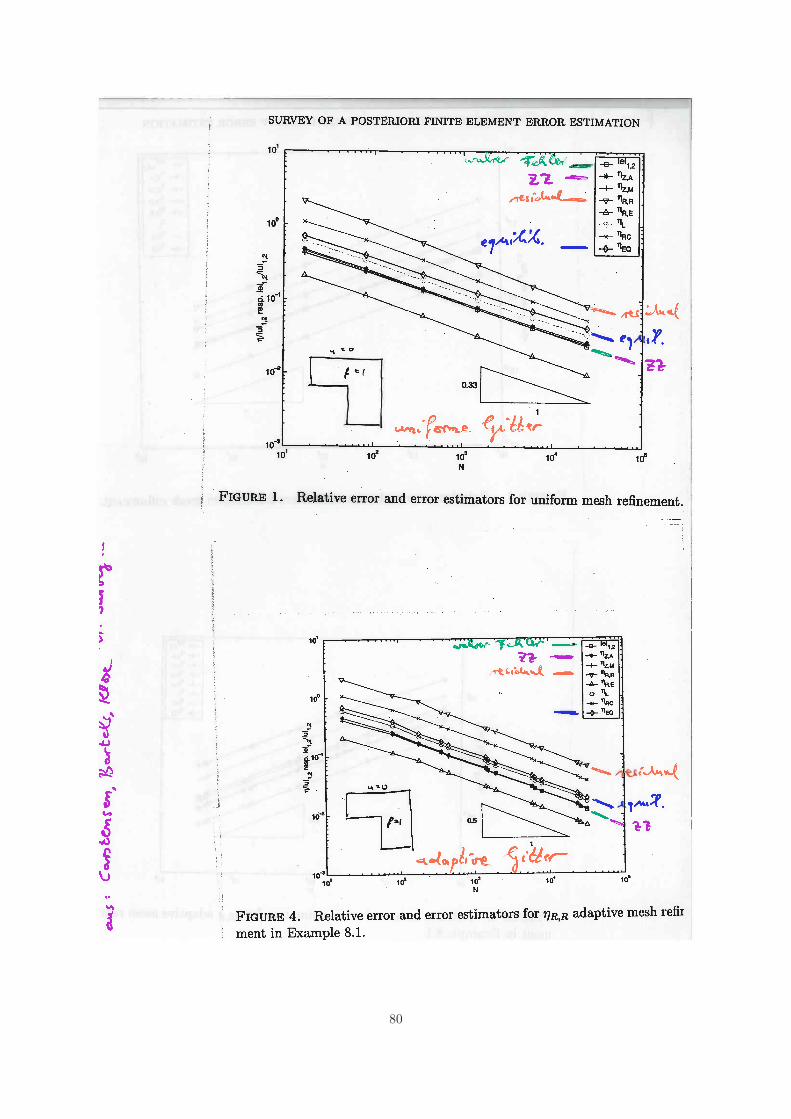
80

Kapitel 7
FEM fur gemische Probleme
7.1 Variationsformulierungen
Seien X , Y Banachraume uber R. Eine Abbildung B : X ×Y → R heißt bilinear, falls fur alle x, x′ ∈ X ,y, y′ ∈ Y , λ ∈ R gilt:
B(x + λx′, y) = B(x, y) + λB(x′, y), B(x, y + λy′) = B(x, y) + λB(x, y′).
Eine solche Bilinearform heißt stetig, falls es eine Konstante C > 0 gibt, so daß
|B(x, y)| ≤ C‖x‖X‖y‖Y ∀x ∈ X, y ∈ Y.
Wir bezeichnen mit
‖B‖ := sup0�=x∈X0�=y∈Y
|B(x, y)|‖x‖X‖y‖Y
die Norm der Bilinearform B. Wir stellen nun die Frage nach Existenz und Eindeutigkeit der Variati-onsformulierung
Finde x ∈ X s.d. B(x, y) = l(y) ∀y ∈ Y (7.1)
zu gegebenem l ∈ Y ′ und gegebener stetiger Bilinearform B. Die Variationsformulierung (7.1) kannaquivalent in Operatorform umgeschrieben werden, indem wir den linearen Operator B : X → Y ′
einfuhren durchB : X → Y ′, x �→ B(x, ·) (7.2)
B ist ein stetiger linearer Operator mit Norm ‖B‖X→Y ′ = ‖B‖. Somit ist (7.1) aquivalent zu
Finde x ∈ X s.d. Bx = l (7.3)
Es gilt der folgende fundamentale Satz
Satz 7.1 (inf-sup Bedingung/BB-BedingungLBB-Bedingung) Sei X ein Banachraum, Y ein re-flexiver Raum. Sei B : X × Y → R eine stetige Bilinearform und B der durch (7.2) definierte lineareOperator. Dann sind die folgenden beiden Aussagen aquivalent:
(i) B : X → Y ′ ist bijektiv und B−1 : Y ′ → X ist ein stetiger linearer Operator mit ‖B−1‖Y ′→X ≤ 1/γ.
(ii)
inf0�=x∈X
sup0�=y∈Y
B(x, y)‖x‖X‖y‖Y
≥ γ > 0 “inf-sup Bedingung” (7.4)
∀0 = y ∈ Y sup0�=x∈X
B(x, y)‖x‖X
> 0 “Nicht-degeneriertheitsbedingung”. (7.5)
81

Beweis: “=⇒ ”: Sei B bijektiv mit ‖B−1‖Y ′→X ≤ 1/γ. Um (7.4) einzusehen, sei 0 = x ∈ X . Dann ist
‖x‖X = ‖B−1Bx‖X ≤ ‖B−1‖Y ′→X‖Bx‖Y ′ ≤ 1γ‖Bx‖Y ′
und somit
1 ≤ 1γ
‖Bx‖Y ′
‖x‖X=
1γ‖x‖X
sup0�=y∈Y
〈Bx, y〉Y ′×Y
‖y‖Y=
1γ‖x‖X
sup0�=y∈Y
B(x, y)‖y‖Y
=1γ
sup0�=y∈Y
|B(x, y)|‖x‖X‖y‖Y
.
Dies zeigt (7.4). Um (7.5) einzusehen, sei 0 = y ∈ Y beliebig gewahlt. Nach dem Satz von Hahn-Banach1
existiert ein y′ ∈ Y ′ mit 〈y′, y〉Y ′×Y = 0. Weil B bijektiv ist, existiert ein x ∈ X mit Bx = y′. Also folgtB(x, y) = 〈Bx, y〉Y ′×Y = 〈y′, y〉Y ′×Y = 0, was die gewunschte Behauptung liefert.“⇐= ”: Wir gehen in mehreren Schritten vor.1. Schritt: Wegen der Stetigkeit vonB ist B : X → Y ′ ein stetiger linearer Operator mit ‖B‖X→Y ′ ≤ ‖B‖.2. Schritt: Behauptung: B ist injektiv und es gilt
γ‖x‖X ≤ ‖Bx‖Y ′ ∀x ∈ X. (7.6)
Diese Abschatzung folgt aus (7.4) aus
‖Bx‖Y ′ = sup0�=y∈Y
〈Bx, y〉Y ′×Y
‖y‖Y= sup
0�=y∈Y
B(x, y)‖y‖Y
≥ γ‖x‖X .
3. Schritt: Behauptung: Das Bild von B ist abgeschlossen in Y ′. Um dies einzusehen, sei (xn)n∈N ⊂ Xeine Folge mit Bxn → y′ ∈ Y ′. Also ist (Bxn)n∈N als konvergente Folge eine Cauchyfolge. Wegen (7.6)folgt
γ‖xn − xm‖X ≤ ‖B(xn − xm)‖Y ′ = ‖Bxn − Bxm‖Y ′ ∀n,m ∈ N.
Somit ist auch (xn)n∈N eine Cauchyfolge. Aus der Vollstandigkeit von X folgt somit die Existenz einesx ∈ X mit limn→∞ xn = x. Die Stetigkeit von B impliziert damit
y′ = limn→∞
Bxn = B limn→∞
xn = Bx,
d.h. y′ ∈ ImB. Somit ist ImB abgeschlossen.4. Schritt: es muß nur noch die Surjektivitat gezeigt werden, da fur stetige lineare Operatoren die Bi-jektivitat auch die Stetigkeit des inversen Operators impliziert (Satz von der offenen Abbildung). Diesgeschieht z.B. durch Widerspruch. Falls ImB = Y ′, dann existiert ein y′ ∈ Y ′ \ ImB. Weil ImB einabgeschlossener Unterraum von Y ′ ist, existiert nach einem Trennungsatz von Hahn-Banach (siehe z.B.[3, Thm. 3.5] oder [5, Cor. zu Thm. 3, Chap. IV, Sec. 6]) ein lineares Funktional 0 = y ∈ Y (hier findetdie Annahme, daß Y reflexiv ist, Anwendung) mit
〈y,Bx〉Y ×Y ′ = 0 ∀x ∈ X, 〈y, y′〉Y ×Y ′ = 1.
Insbesondere impliziert dies0 = 〈y,Bx〉Y ×Y ′ = B(x, y) ∀x ∈ X
was in Widerspruch zu (7.5) steht. �
finis 30.Stundefinis 31.Stunde
Ubung 7.2 (a) Sei B ∈ Rn×m und ‖ · ‖2 die euklidische Norm auf Rn, Rm. Zeigen Sie:
inf‖u‖2=1
sup‖v‖2=1
uTBv > 0 ⇐⇒ KerBT = {0}
∀v = 0 : sup‖u‖2=1
uTBv > 0 ⇐⇒ KerB = {0}
1der Fall Y = Hilbertraum ist besonders einfach
82

(b) Sei nun n = m. Zeigen Sie:
inf‖u‖2=1
sup‖v‖2=1
uTBv ≥ γ > 0 =⇒ ‖B−1‖ ≤ γ−1.
�
Ubung 7.3 Weil von Y lediglich die Reflexivitat gefordert wird, verwendet der Beweis von Satz 7.1 den(recht abstrakten) Satz von Hahn-Banach. Man uberlege sich die Argumente fur die einfachere Situation,daß Y ein Hilbertraum ist. �
Bemerkung 7.4 Der Beweis von Satz 7.1 zeigt: Die “inf-sup”-Bedingung (7.4) garantiert die Injektivitatdes Operators B und die Abgeschlossenheit von ImB. Die Bedingung (7.5) stellt sicher, daß ImB = Y ′.Wird die Bedingung (7.5) nicht gefordert, dann kann ImB = ImB � Y ′ gelten. Das Bild ImB kann jedochdurch KerB� charakterisiert werden. Diese Charakterisierung (in der Literatur unter dem Stichwort“Satz vom abgeschlossenen Bild” gefuhrt) wird im folgenden Lemma 7.5 vorgenommen und kann manals Verallgemeinerung des folgenden Resultats aus der linearen Algebra gesehen werden (fur einen Beweissiehe S. 74): Fur A ∈ Rn×m gilt ImA =
(KerA�)⊥.
Lemma 7.5 Seien X, Y reflexive Raume, B : X × Y → R stetige Bilinearform. Definiere B und denadjungierten Operator B� : Y → X ′ durch
B : X → Y ′, 〈Bx, y〉Y ′×Y = B(x, y) ∀y ∈ Y (7.7a)B� : Y → X ′, 〈B�y, x〉X′×X = B(x, y) ∀x ∈ X. (7.7b)
Definiere weiter die Mengen
KerB := {x ∈ X |B(x, y) = 0 ∀y ∈ Y } (7.8a)KerB� := {y ∈ Y |B(x, y) = 0 ∀x ∈ X} (7.8b)
(KerB)◦ := {x ∈ X ′ | 〈x, x′〉X×X′ = 0 ∀x ∈ KerB} (7.8c)(KerB�)◦ := {y ∈ Y ′ | 〈y, y′〉Y ×Y ′ = 0 ∀y ∈ KerB�} (7.8d)
Dann gilt:
(i) B, B� sind stetige lineare Operatoren mit ‖B‖X→Y ′ = ‖B�‖Y →X′ = ‖B‖
(ii) Falls ImB abgeschlossen in Y ′ ist, so gilt ImB = ImB = (KerB�)◦
(iii) Falls ImB� abgeschlossen in X ′ ist, so gilt ImB� = ImB� = (KerB)◦
Beweis: ad (i): Die Linearitat von B, B� ist klar. Fur die Berechnung der Norm bemerken wir
‖B�‖Y →X′ = sup0�=y∈Y
‖B�y‖X′
‖y‖Y= sup
0�=y∈Ysup
0�=x∈X
〈B�y, x〉X′×X
‖x‖X‖y‖Y= sup
0�=y∈Ysup
0�=x∈X
〈Bx, y〉Y ′×Y
‖x‖X‖y‖Y= ‖B‖.
ad (ii): Wir zeigen ImB ⊂ (KerB�)◦. Sei y ∈ KerB� und x ∈ X . D.g.:
〈Bx, y〉Y ′×Y = B(x, y) = 〈x,B�y〉X×X′ = 0.
Also gilt fur jedes x ∈ X , daß Bx ∈ (KerB�)◦.Wir zeigen nun (KerB�)◦ ⊂ ImB. Hierzu nehmen wir die Existenz eines y′ ∈ (KerB�)◦ an mit
y′ ∈ ImB = ImB. Nach einem Trennungssatz von Hahn-Banach und der Voraussetzung, daß Y reflexivist (vgl. den Beweis von Satz 7.1!) erhalten wir die Existenz eines y ∈ Y mit
〈y, y′〉Y ×Y ′ = 0 und 〈y,Bx〉Y ×Y ′ = 0 ∀x ∈ X.
Aus der zweiten Bedingung sehen wir y ∈ KerB�. Aus y′ ∈ (KerB�)◦ folgt somit 〈y, y′〉Y ×Y ′ = 0, wasden gewunschten Widerspruch erzeugt.ad (iii): analog zum Beweis von (ii). �
83

Ubung 7.6 Der Beweis beruht wieder auf einem Hahn-Banach-Argument. Man uberlege sich, wie dieArgumente im Falle von Hilbertraumen X , Y aussehen. Insbesondere uberlege man sich, wie die Polaren(KerB)◦ und (KerB�)◦ als orthogonale Komplemente der Kerne KerB und KerB� verstanden werdenkonnen.
Satz 7.7 Seien X, Y Hilbertraume, B : X × Y → R stetige Bilinearform. Sei γ > 0 so, daß
inf0�=x∈X
sup0�=y∈Y
|B(x, y)|‖x‖X‖y‖Y
≥ γ > 0.
Dann gilt:
(i) (a) B : X → Y ′ is injektiv
(b) γ‖x‖X ≤ ‖Bx‖Y ′ fur alle x ∈ X
(c) ImB ist abgeschlossen, und es gilt ImB = ImB = (KerB�)◦
(ii) (a) B� : Y → X ′ ist surjektiv
(b) ‖B�y‖X′ ≥ γ‖y‖Y ∀y ∈ (KerB�)⊥ := {y ∈ Y | 〈y, z〉 = 0 ∀z ∈ KerB�}(c) Fur jedes x′ ∈ X ′ existiert ein eindeutiges y ∈ (KerB�)⊥ mit B�y = x′ und γ‖y‖Y ≤ ‖x′‖X′ .
Beweis: ad (i): (ia) folgt aus (ib). Die Behauptung (ib) wurde bereits im Beweis von Satz 7.1 gezeigt.Die Aussage (ic) folgt aus Lemma 7.5.ad (ii): Wir beginnen mit (iib). Sei hierzu y ∈ (KerB�)⊥. Fassen wir y als Element von Y ′ (volligkanonisch durch 〈y, ·〉) auf, so bemerken wir y ∈ (KerB�)◦. Nach Lemma 7.5 ergibt sich somit dieExistenz eines x ∈ X mit Bx = y. Weiter haben wir aus (ib), daß γ‖x‖X ≤ ‖y‖Y . Damit erhalten wir
‖y‖2Y = 〈y, y〉 = 〈y,Bx〉 = B(x, y) = 〈B�y, x〉X′×X ≤ ‖B�y‖X′‖x‖X ≤ ‖B�‖X′
1γ‖y‖Y ,
was die gewunschte Behauptung (iib) liefert. Wir zeigen nun (iia): Genau wie im Beweis von Satz 7.1 siehtman, daß die Abschatzung auf (iib) die Abgeschlossenheit von ImB� nach sich zieht. Weiter folgt aus derInjektivitat von B, daß KerB = {0}, d.h. (KerB)◦ = X ′. Aus Lemma 7.5 folgt somit die Surjektivitatvon B�, d.h. (iia). Aussage (iic) folgt aus (iib). �
7.2 FEM: Petrov-Galerkin Methoden
Die Diskretisierung von (7.1) erfolgt durch Ersetzen der RaumeX , Y durch endlich-dimensionale TeilraumeXN ⊂ X und YN ⊂ Y . Man erhalt dann das Galerkin-Petrov-Verfahren
Finde xN ∈ XN s.d. B(xN , y) = l(y) ∀y ∈ YN . (7.9)
(7.9) ist aquivalent zum Losen ein LGS, wenn Basen der Raume XN und YN gewahlt werden (vgl. dasVorgehen in Abschnitt 2.3.2). Sinnvollerweise wird man dimXN = dim YN verlangen. Uber die eindeutigeLosbarkeit des Problems (7.9) gibt der folgende Satz Auskunft:
Satz 7.8 Seien X, Y Hilbertraume, XN ⊂ X und YN ⊂ Y Teilraume mit
dimXN = dim YN = N <∞. (7.10)
Sei B : X × Y → R eine stetige Bilinearform. Sei γN > 0, so daß die diskrete inf-sup-Bedingung
inf0�=x∈XN
sup0�=y∈YN
|B(x, y)|‖x‖X‖y‖Y
≥ γN > 0 (7.11)
gilt. Dann gilt: Fur jedes l ∈ Y ′ ist (7.9) eindeutig losbar, und die Losung xN ∈ XN von (7.9) erfullt
‖xN‖X ≤ 1γN
‖l‖Y ′ . (7.12)
84

Beweis: Durch Festlegen von Basen von XN und YN ist (7.9) aquivalent zum Losen eines LGS der FormBNx = l mit BN ∈ RN×N und l ∈ RN . Die diskrete inf-sup-Bedingung (7.11) impliziert KerBN = {0},so daß BN regular ist. Also ist die eindeutige Losbarkeit von (7.9) gegeben. Die Abschatzung (7.12)ergibt sich aus
γN‖xN‖X ≤ sup0�=y∈YN
|B(xN , y)|‖y‖Y
= sup0�=y∈YN
|l(y)|‖y‖Y
≤ ‖l‖Y ′ .
�
Bemerkung 7.9 In Satz 7.8 ist die Bedingung (7.11) offensichtlich das Analogon zu (7.4). Die Bedin-gung (7.5) aus Satz 7.1 (welches im Wesentlichen die Surjektivitat garantierte) von wird im endlich-dimensionalen Fall von Satz 7.8 durch ein Dimensionsargument ersetzt.
Bemerkung 7.10 Im Fall von koerziven Bilinearformen a wie sie in Kapitel 2 betrachtet wurden, ver-erbte sich die Koerzivitat von a aufX ins Endlichdimensionale, d.h. a eingeschrankt auf TeilraumeXN istwiederum koerziv mit der selben Koerzivitatskonstante. Dies unterscheidet den koerziven Fall aus Kapi-tel 2 vom hier betrachteten Fall (7.1): Selbst wenn der Operator B die kontinuierliche inf-sup-Bedingung(7.4) erfullt, ist die diskrete inf-sup-Bedingung (7.11) nicht automatisch erfullt und muß separat sicher-gestellt werden. In der Praxis bedeutet dies, daß die Raume XN und YN nicht unabhangig von einandergewahlt werden konnen, wenn die diskrete inf-sup-Bedingung (7.11) erfullt werden soll.
Wir wenden uns nun dem Fehler x− xN zu. Hierzu ist wie im Kapitel 2 die Galerkinorthogonalitat daswesentliche Hilfsmittel:
Lemma 7.11 Sei x ∈ X Losung von (7.1) und xN ∈ XN die durch (7.9) bestimmte Galerkinapproxi-mation. Dann gilt die Galerkinorthogonalitat
B(x− xN , y) = 0 ∀y ∈ YN . (7.13)
Beweis: Folgt durch Subtraktion der Gleichungen (7.1), (7.9). �
Der Einfuß der diskreten inf-sup-Konstante γN aus (7.11) kommt sehr klar in der folgenden Fehler-abschatzung heraus.
Satz 7.12 Seien X, Y Hilbertraume, XN ⊂ X und YN ⊂ Y Teilraume. Sei B : X × Y → R stetigeBilinearform. Es gelte (7.10), (7.11). Sei x ∈ X Losung von (7.1) und xN ∈ XN Losung von (7.9).Dann gilt:
‖x− xN‖X ≤(
1 +‖B‖γN
)inf
zN∈XN
‖x− zN‖X .
Beweis: Nach Satz 7.8 existiert xN ∈ XN . Sei zN ∈ XN beliebig. Die diskrete inf-sup-Bedingung (7.11)und die Galerkinorthogonalitat (7.13) liefern dann:
γN‖xN − zN‖X ≤ sup0�=y∈YN
|B(xN − zN , y)|‖y‖Y
= sup0�=y∈YN
|B(x− zN , y)|‖y‖Y
≤ ‖B‖‖x− zN‖X .
Mit der Dreiecksungleichung ergibt sich
‖x− xN‖X ≤ ‖x− zN‖X + ‖xN − zN‖X ≤ ‖x− zN‖X + γ−1N ‖B‖‖x− zN‖X ,
was die gewunschte Behauptung liefert. �
85

7.3 Sattelpunktprobleme
7.3.1 Motivation
Sattelpunktprobleme treten auf, wenn ein (quadratrisches) Minimierungsproblem unter einer (linearen)Nebenbedingung gelost werden. Seien X und M Hilbertraume und a : X ×X → R und b : X ×M → R
stetige Bilinearformen. Seien weiter l ∈ X ′ und g ∈M ′. Definiere das quadratische Funktional J und diezulassige Menge X(g) durch
J(u) :=12a(u, u) − l(u) (7.14)
X(g) := {u ∈ X | b(u, q) = g(q) ∀q ∈M} (7.15)
und betrachten die Aufgabe, einen Minimierer u des Problems
minu∈X(g)
J(u) (7.16)
zu finden2. Um dieses (quadratische) Minimierungsproblem zu losen, fuhren wir das LangrangefunktionalL ein durch
L : X ×M → R, L(u, λ) := J(u) + [b(u, λ) − g(λ)] . (7.17)
Wir bemerken:J(u) = L(u, λ) ∀λ ∈M ∀u ∈ X(g). (7.18)
Diese Beobachtung motiviert das folgende Vorgehen, um das Minimierungsproblem (7.16) zu losen:
1. Finde fur jedes λ ∈M einen Minimierer uλ ∈ X von L(·, λ).
2. Suche anschließend λ ∈M derart, daß das zugeordnete uλ aus dem ersten Schritt die Nebenbedin-gung uλ ∈ X(g) erfullt. Ein so gefundenes uλ muß dann eine Losung von (7.16) sein.
Dieses Vorgehen kann man wie folgt als Gleichungssystem schreiben: Finde (u, λ) ∈ X ×M so, daß
a(u, v) + b(v, λ) = l(v) ∀v ∈ X (7.19a)b(u, μ) = g(μ) ∀μ ∈M. (7.19b)
Hier ergibt sich die Gleichung (7.19a) aus dem ersten Schritt (die Bestimmung der unrestringierten Mini-mierer uλ) und (7.19b) aus dem zweiten Schritt (die Forderung nach uλ ∈ X(g)). Es ist hervorzuheben,daß es an dieser Stelle nicht klar ist, daß das Sattelpunktproblem (7.19) eine Losung (u, λ) hat, selbstwenn das ursprungliche Problem (7.16) eine Losung u ∈ X(g) hat.
Um den Zusammenhang zwischen Losungen von (7.16) und (7.19) zu klaren, bemerken wir:
Lemma 7.13 Sei die stetige Bilinearform a : X×X → R symmetrisch und zusatzlich positiv semidefinit,d.h. a(v, v) ≥ 0 fur alle v ∈ X. Dann gilt: Eine Losung (u, λ) von (7.19) erfullt die Sattelpunktbedingung
L(u, μ) ≤ L(u, λ) ≤ L(v, λ) ∀(v, μ) ∈ X ×M (7.20)
und u ist eine Losung des Minimierungsproblems (7.16).
Beweis: Fur eine Losung (u, λ) von (7.19) rechnen wir nach:
L(u, μ)(7.18)= L(u, λ) ∀μ ∈M
L(v, λ) = L(u, λ) +12a(u− v, u− v)︸ ︷︷ ︸
≥0
∀v ∈ X.
Daraus ergibt sich die Sattelpunkteigenschaft (7.20) der Losung (u, λ). Die Komponente u ∈ X ist eineLosung des Minimierungsproblems, denn aus (7.18) und (7.20) folgt fur jedes v ∈ X(g) ⊂ X :
J(u)(7.18)= L(u, λ)
(7.20)
≤ L(v, λ)(7.18)= J(v).
2wir lassen zunachst Existenz und Eindeutigkeit von Losungen außer Betracht
86

�
Das Sattelpunktproblem (7.19) kann naturlich auch in Operatorform geschrieben werden. Seien hierzudie (stetigen, linearen) Operatoren A : X → X ′ und B : X →M ′ definiert durch
〈Ax, y〉X′×X = a(x, y) ∀x, y ∈ X
〈Bx, y〉M ′×M = b(x, y) ∀x ∈ X, y ∈M
Dann ist (7.19) aquivalent zum Problem: Finde (u, λ) ∈ X ×M , so daß(A B�
B
) (uλ
)=
(lg
). (7.21)
Ubung 7.14 Sei A ∈ Rn×n symmetrisch, positiv semidefinit. Sei B ∈ Rm×n (mit m ≤ n), l ∈ Rn,g ∈ Rm. Sei u ∈ R ein Minimierer von
minu∈Rn:Bu=g
12u�Au− l�u.
Zeigen Sie:
(a) Es existiert ein Langrangemultiplikator λ ∈ Rm, so daß folgendes LGS erfullt ist:(A B�
B
) (uλ
)=
(fg
).
(b) (Eindeutigkeit von u) Falls A SPD auf KerB ist, dann ist der Minimierer u eindeutig.
(c) (Eindeutigkeit von λ) λ ist eindeutig bestimmt, falls A SPD auf KerB ist und KerB� = {0} ist.Zeigen Sie: KerB� = {0}, falls B vollen Rang hat.
�
7.3.2 abstrakte Existenztheorie fur Sattelpunktprobleme
Die Losbarkeit des Sattelpunktproblems (7.19) ist nicht offensichtlich und erfordert Bedingungen an dieBilinearformen a und b. Eine Moglichkeit ist, die beiden Gleichungen in (7.19) in ein auf X×M gestelltesVariationsproblem zusammenzufassen:
Ubung 7.15 Zeigen Sie: (u, λ) ∈ X ×M ist Losung des Sattelpunktproblems (7.19) genau dann, wennes Losung des folgende Variationsproblems ist:
Finde (u, λ) ∈ X ×M s.d. B((u, λ), (v, μ)) := a(u, v)+b(v, λ)+b(u, μ) = l((v, μ)) := l(v)+g(μ) ∀(v, μ) ∈ X×M.
�
Ubung 7.15 zeigt, daß wir Existenz und Eindeutigkeit von Losungen des Sattelpunktproblems (7.19) mitSatz 7.1 beantworten konnten. Die spezielle Struktur von (7.19) erlaubt uns jedoch, Losungtheorie fur(7.19) direkt anzugehen:
Satz 7.16 Seien X, M Hilbertraume, a : X ×X → R, b : X ×M → R stetige Bilinearformen. Es gebeα, γ > 0, so daß
a(u, u) ≥ α‖u‖2X ∀u ∈ KerB = {u ∈ X | b(u, μ) = 0 ∀μ ∈M}, (7.22)
inf0�=μ∈M
sup0�=u∈X
|b(u, μ)|‖u‖X‖μ‖M
≥ γ > 0. (7.23)
Dann existiert fur jedes l ∈ X ′ und g ∈ M ′ eine eindeutige Losung (u, λ) ∈ X ×M von (7.19), und esgilt
‖u‖X ≤ 1α‖l‖X′ +
1γ
(1 +
‖a‖α
)‖g‖M ′
‖λ‖M ≤ 1γ
(1 +
‖a‖α
) (‖l‖X′ +
‖a‖γ
‖g‖M ′
).
87

Beweis: Wir werden in Schritten 1–3 die Existenz einer Losung zeigen sowie die Abschatzungen. InSchritt 4 zeigen wir dann die Eindeutigkeit.1. Schritt: Wir erinnern daran, daß wir das Sattelpunktproblem in der Form (7.21) schreiben konnen.Aufgrund der inf-sup-Bedingung (7.23) liefert Satz 7.7, daß der Operator B� injektiv ist, daß B surjektivist und daß es ein u0 ∈ (KerB)⊥ gibt, so daß
Bu0 = g und γ‖u0‖X ≤ ‖Bu0‖M ′ = ‖g‖M ′.
2. Schritt: Wir machen nun fur die gesuchte Losung u den Ansatz u = u+ u0. Das Sattelpunktproblem(7.19) ist dann aquivalent zum Auffinden der Losung (u, λ) ∈ X ×M von
a(u, v) + b(v, λ) = l(v) − a(u0, v) ∀v ∈ X (7.24a)b(u, μ) = 0 ∀μ ∈M. (7.24b)
Wir definieren nun u ∈ KerB ⊂ X als Losung von
Finde u ∈ KerB s.d. a(u, v) = l(v) − a(u0, v) ∀v ∈ KerB. (7.25)
Diese Losung existiert (und ist eindeutig), denn a ist nach (7.22) koerziv auf dem abgeschlossenenUnterraum KerB, so daß der Satz von Lax-Milgram (Satz 2.17) anwendbar ist. Zudem erhalten wir
‖u‖X ≤ 1α
[‖l‖X′ + ‖a‖‖u0‖X ] ≤ 1α
[‖l‖X′ +
‖a‖γ
‖g‖M ′
].
3. Schritt: Wir bemerken, daß die obige Wahl von u automatisch die Nebenbedingung (7.24b) erfullt.Wir konstruieren nun λ ∈M so, daß auch (7.24a) gilt. Offensichtlich muß λ folgendes Problem losen:
Finde λ ∈M s.d. b(v, λ) = l(v) − a(u0, v) − a(u, v)︸ ︷︷ ︸=:l′(v)
∀v ∈ X (7.26)
In Operatorschreibweise ist dies B�λ = l′. Diese Gleichung ist nach Satz 7.7, (i) losbar, falls l′ ∈(KerB�)◦. Nun ist nach (7.25) l′(v) = 0 fur alle v ∈ KerB�, d.h. l′ ∈ (KerB�)◦. Nach Satz 7.7 ist (7.26)
also losbar, und es gilt
γ‖λ‖M ≤ ‖l′‖M ′ ≤ ‖l‖X′ + ‖a‖ ‖u0‖X + ‖a‖ ‖u‖X (7.27)
Insgesamt haben wir mit (u, λ) = (u0 + u, λ) eine Losung von (7.19) konstruiert. Zusammenstellen derAbschatzungen liefert die behaupteten Abschatzungen fur u und λ.4. Schritt: Wir zeigen nun die Eindeutigkeit der Losung von (7.19). Sei (u, λ) ∈ X ×M Losung von
a(u, v) + b(v, λ) = 0 ∀v ∈ X
b(u, μ) = 0 ∀μ ∈M.
Aus der zweiten Gleichung folgt u ∈ KerB. Die Wahl v = u in der ersten Gleichung liefert damit
a(u, u) + b(u, λ)︸ ︷︷ ︸=0 wegen u ∈ KerB
= 0.
Also a(u, u) = 0 und u ∈ KerB. Die geforderte Koerzivitat von a auf KerB in (7.22) erzwingt damitu = 0. Damit ergibt sich B�λ = 0. Dies impliziert λ = 0, weil (wie oben gesehen) die inf-sup-Bedingung(7.23) die Injektivitat von B� impliziert. �
Ubung 7.17 Sei A ∈ Rn×n und B ∈ Rm×n. Sei A positiv definit auf KerB. Definiere
B :=(
A B�
B 0
)
Zeigen Sie: Die Matrix B ist regular genau dann wenn B� die folgende inf-sup-Bedingung erfullt:
inf‖v‖2=1
sup‖u‖2=1
v�Bu > 0
88

7.3.3 FEM fur Sattelpunktprobleme (gemischte Methoden)
Um eine FEM-Diskretisierung von (7.19) zu erhalten, wahlt man Teilraume XN ⊂ X und MN ⊂M undbetrachtet das Problem: Finde (uN , λN ) ∈ XN ×MN , so daß
a(uN , v) + b(v, λN ) = l(v) ∀v ∈ XN (7.28a)b(uN , μ) = g(μ) ∀μ ∈MN (7.28b)
Durch Wahl von Basen der Raume XN und MN ist (7.28) aquivalent zu einem LGS der Form(A B�
B
) (up
)=
(lg
)(7.29)
wobei A ∈ Rdim XN×dim XN , B ∈ Rdim MN×dim XN etc. Losbarkeit dieses LGS ist unter geeigneten An-nahmen an die Bilinearformen a, b und die Teilraume XN , MN gegeben:
Satz 7.18 Seien a : X ×X → R und b : X ×M → R stetige Bilinearformen auf den Hilbertraumen Xund M . Seien XN ⊂ X und MN ⊂M abgeschlossene Teilraume. Definiere
KerBN := {x ∈ XN | b(x, μ) = 0 ∀μ ∈MN}.
Gelte fur αN , γN > 0 die Abschatzungen
a(u, u) ≥ αN‖u‖2X ∀u ∈ KerBN (7.30)
inf0�=λ∈MN
sup0�=u∈XN
b(u, λ)‖u‖X‖λ‖M
≥ γN > 0 (7.31)
Dann gilt: fur jedes l ∈ X ′ und g ∈M ′ hat (7.28) eine eindeutige Losung (uN , λN ) ∈ XN ×MN und esgelten die Abschatzungen
‖uN‖X ≤ 1αN
‖l‖X′ +1γN
(1 +
‖a‖αN
)‖g‖M ′
‖λN‖M ≤ 1γN
(1 +
‖a‖αN
) (‖l‖X′ +
‖a‖γN
‖g‖M ′
).
Beweis: Wende Satz 7.16 mit den beiden Hilbertraumen (XN , ‖ · ‖X), (MN , ‖ · ‖M ) an. �
Wir wenden uns nun dem Approximationsfehler (u − uN , λ− λN ) zu:
Satz 7.19 Es gelten die Voraussetzungen von Satz 7.18. Sei (uN , λN ) ∈ XN ×MN Losung von (7.28)und (u, λ) ∈ X ×M Losung von (7.19). Dann gilt:
‖u− uN‖X ≤(
1 +‖a‖αN
) (1 +
‖b‖γN
)inf
v∈XN
‖u− v‖X +‖b‖αN
infμ∈MN
‖λ− μ‖M
‖λ− λN‖M ≤(
1 +‖b‖γN
)inf
μ∈MN
‖λ− μ‖M +‖a‖γN
‖u− uN‖X
Beweis: 1. Schritt: Aus den Gleichungen fur (u, λ) und (uN , λN ) erhalten wir die folgenden Orthogona-litatsbeziehungen:
a(u− uN , vN ) + b(vN , λ− λN ) = 0 ∀vN ∈ XN (7.32a)b(u− uN , μN ) = 0 ∀μN ∈MN . (7.32b)
2. Schritt: (Abschatzung fur λ − λN ): Sei μN ∈ MN beliebig. Dann gilt wegen der diskreten inf-sup-Bedingung (7.31)
γN‖λN − μN‖M ≤ sup0�=vN∈XN
|b(vN , λN − μN )|‖vN‖X
(7.32a)= sup
0�=vN∈XN
|b(vN , λ− μN ) + a(u− uN , vN )|‖vN‖X
≤ ‖b‖ ‖λ− μN‖M + ‖a‖ ‖u− uN‖X .
89

Also erhalten wir mit der Dreiecksungleichung ‖λ− λN‖M ≤ ‖λ− μN‖M + ‖λM − μN‖M , daß
‖λ− λN‖M ≤ ‖a‖γN
‖u− uN‖X +(
1 +‖b‖γN
)inf
μN∈MN
‖λ− μN‖M .
3. Schritt: (Abschatzung von ‖u− uN‖X :) Wir definieren den affinen Raum
ZN (g) := {v ∈ XN | b(v, μ) = g(μ) ∀μ ∈MN}
und behaupten:
‖u− uN‖X ≤(
1 +‖a‖αN
)inf
vN∈ZN (g)‖u− vN‖X +
‖g‖γN
infμN∈MN
‖λ− μN‖M .
Um dies einzusehen, sei vN ∈ ZN (g) beliebig. Dann ist uN − vN ∈ KerBN . Wegen der diskreten Koerzi-vitat (7.30) gilt dann
αN‖uN − vN‖2X ≤ a(uN − vN , uN − vN ) = a(uN − u, uN − vN ) + a(u− vN , uN − vN )
Nun folgt aus der Orthogonalitat (7.32a) fur beliebiges μN ∈MN
a(uN − u, uN − vN )(7.32a)
= b(uN − vN , λ− λN ) = b(uN − vN , λ− μN ) + b(uN − vN , μN − λN )︸ ︷︷ ︸=0wg. uN − vN ∈ KerBN
= b(uN − vN , λ− μN ),
und wir erhalten
αN‖uN − vN‖2X ≤ b(uN − vN , λ− μN ) + a(u− vN , uN − vN )
≤ ‖b‖ ‖uN − vN‖X‖λ− μN‖M + ‖a‖ ‖u− vN‖X ‖uN − vN‖X ,
woraus sich
‖u− uN‖X ≤ ‖u− vN‖X + ‖vN − uN‖X ≤(
1 +‖a‖αN
)‖u− vN‖X +
‖b‖αN
‖λ− μN‖M
ergibt. Weil vN ∈ ZN (g) und μN ∈MN beliebig waren, ergibt sich die Behauptung.4. Schritt: Wir schatzen nun infvN∈ZN (g) ‖u− vN‖X ab und behaupten
infwN∈ZN (g)
‖u− wN‖X ≤(
1 +‖b‖γN
)inf
vN∈XN
‖u− vN‖X .
Hierzu sei vN ∈ XN beliebig. Wir betrachten das Problem:
Finde rN ∈ XN s.d. b(rN , μN ) = b(u− vN , μN ) ∀μN ∈MN .
Wie im Beweis des 1. Schrittes von Satz 7.16 sehen wir, daß dieses Problem eine Losung hat, und es gilt
γN‖rN‖X ≤ supμ∈MN
|b(u− vN , μ)|‖μ‖M
≤ ‖b‖ ‖u− vN‖X .
Weiter ist b(rN + vN , μ) = b(u, μ) = g(μ) fur alle μ ∈MN . Also ist rN + vN ∈ ZN (g). Damit ergibt sich
infw∈ZN (g)
‖u− w‖X ≤ ‖u− (rN + vN )‖X ≤ ‖u− vN‖X +‖b‖γN
‖u− vN‖X ≤(
1 +‖b‖γN
)‖u− vN‖X .
Da vN ∈ XN beliebig war, folgt die gewunschte Behauptung. �
90

Bemerkung 7.20 Die diskrete inf-sup-Konstante γN hangt von der Wahl der Raume XN und MN ab(wir diskutieren das unten genauer). In der Praxis kann es deshalb passieren, daß γN klein ist (odersogar limN→∞ γN = 0). Die Fehlerabschatzung aus Satz 7.19 zeigt, daß der Fehler λ−λN davon starkerbetroffen ist als der Fehler u−uN , denn der ‖u−uN‖X ist nur ein Faktor 1γN von einem Bestapproximati-onsfehler entfernt, wahrend ‖λ−λN‖M durch einen Faktor (1/γN )2 von einem Bestapproximationsfehlerentfernt ist.
Bei vielen Problemen ist die (diskrete) Koerzivitat von a, (7.30) nicht so schwer zu beweisen—es istdie diskrete inf-sup-Bedingung (7.31), die großere Anforderungen an die Raume XN und MN stellt. Diefolgenden zwei Lemmata stellen allgemeine Hilfsmittel zu Verfugung, um zu prufen, ob ein gegebenesPaar (XN ,MN ) von Raumen die diskrete inf-sup-Bedingung (7.31) erfullt.
Lemma 7.21 (Kriterium von M. Fortin) Sei b : X ×M → R stetige Bilinearform, die die kontinu-ierliche inf-sup-Bedingung
inf0�=λ∈M
sup0∈∈X
b(u, λ)‖u‖X‖λ‖M
≥ γ > 0 (7.33)
erfullt. Seien XN ⊂ X und MN ⊂M abgeschlossene Teilraume. Sei Π : X → XN eine lineare Abbildungmit
b(u− Πu, λ) = 0 ∀λ ∈MN (7.34)‖Πu‖X ≤ CΠ‖u‖X ∀u ∈ X. (7.35)
Dann gilt:
inf0�=λ∈MN
sup0�=u∈XN
b(u, λ)‖u‖X‖λ‖M
≥ γN :=γ
CΠ> 0.
Beweis: Sei λ ∈MN beliebig. Dann gilt:
γ‖λ‖M
(7.33)
≤ sup0�=v∈X
b(v, λ)‖v‖X
(7.34)= sup
0�=v∈X
b(Πv, λ)‖v‖X
(7.35)
≤ sup0�=v∈X
b(Πv, λ)‖Πv‖X
= sup0�=v∈ImΠ
b(v, λ)‖v‖X
≤ sup0�=v∈XN
b(v, λ)‖v‖X
�
Eine oft eingesetzte Technik, den Projektor Π zu erzeugen wird im folgenden Lemma gemacht:
Lemma 7.22 Seien Πi : X → XN , i = 1, 2, lineare Abbildungen mit
‖Π1u‖X ≤ C1‖u‖X ∀u ∈ X
‖Π2(Id − Π1)u‖X ≤ C2‖u‖X ∀u ∈ X
b(u− Π2u, λ) = 0 ∀λ ∈MN .
Gelte zudem die kontinuierliche inf-sup-Bedingung (7.33). Dann gilt:
inf0�=λ∈MN
sup0�=u∈XN
b(u, λ)‖u‖X‖λ‖M
≥ γ
C1 + C2.
Beweis: Sei λ ∈MN . Definiere Π : X → XN durch Πu := Π2(Id − Π1)u+ Π1u. Dann ist
b(Πu, λ) = b(Π2(u − Π1u), λ) + b(Π1u, λ) = b(u− Π1u, λ) + b(Π1u, λ) = b(u, λ).
Weiter ist‖Πu‖X ≤ ‖Π2(Id − Π1)u‖X + ‖Π1u‖X ≤ (C1 + C2)‖u‖X .
�
91

7.4 Stokesproblem
7.4.1 setting
Wir wenden die allgemeine Theorie fur Sattelpunktproblem auf das folgende Problem: Sei Ω ⊂ R2 einLipschitzgebiet und betrachte das Problem: Finde u = (u1, u2) ∈ H1
0 (Ω)×H10 (Ω) und p ∈ L2(Ω), so daß
−Δu+ ∇p = f in Ω (7.36a)∇ · u = 0 in Ω (7.36b)
fur gegebenes f = (f1, f2)� ∈ L2(Ω)×L2(Ω). Hier ist der Operator −Δ komponentenweise anzuwenden,d.h. Δu = (Δu1,Δu2)�.
Bemerkung 7.23 Physikalisch beschreibt u das Geschwindigkeitsfeld und p den Druck in einer (stati-onaren) Stromung. Die Inkompressibilitatsbedingung ∇ · u = 0 druckt aus, daß ein inkompressibles Fluidbetrachtet wird. Die Gleichung −Δu+∇p = f stellt den Impulserhaltungssatz dar. Die Stokesschen Glei-chungen (7.36) entstehen durch (starke) Vereinfachungen der Navier-Stokesschen Gleichungen und sindnur angemessen fur die Beschreibung von z.B. viskosen, langsam fließenden Stromungen (z.B. Honig).
Eine schwache Formulierung ergibt sich wie folgt:∫Ω
∇u : ∇v +∫
Ω
p∇ · v =∫
Ω
fv ∀v ∈ (H10 (Ω))2 (7.37a)∫
Ω
q∇ · u = 0 ∀q ∈ L2(Ω). (7.37b)
Offensichtlich kann der Druck nur bis auf eine Konstante festgelegt sein—diese wird uberlicherweise sogewahlt, daß die Normalisierung
∫Ω p = 0 erreicht wird. Es ist deshalb zweckmaßig, den Raum
L20(Ω) := {p ∈ L2(Ω) |
∫Ω
p = 0} (7.38)
einzufuhren. Unter der Nebenbedingung (7.38) ist (7.37) dann aquivalent zum Problem: Finde (u, p) ∈(H1
0 (Ω))2 × L20(Ω), so daß
a(u, v) + b(p, v) = l(v) ∀v ∈ (H10 (Ω))2 (7.39a)
b(q, u) = 0 ∀q ∈ L20(Ω), (7.39b)
wobei
a(u, v) =∫
Ω
∇u : ∇v (7.40a)
b(p, v) =∫
Ω
p∇ · v (7.40b)
Existenz und Eindeutigkeit fur das Stokesproblem ergibt sich aus dem folgenden Resultat (in Zusam-menhang mit Satz 7.16):
Satz 7.24 (deRham) Sei Ω Lipschitzgebiet und die Bilinearformen a, b durch (7.40) gegeben. Dannexistiert ein γ > 0, so daß
inf0�=p∈L2
0(Ω)sup
0�=u∈(H10 (Ω))2
|b(p, v)|‖p‖L2(Ω)‖v‖H1(Ω)
≥ γ > 0.
Bemerkung 7.25 Der Druck ubernimmt die Rolle des Lagrangemultiplikators. Im Prinzip liegt einMinimierungsproblem fur das Geschwindigkeitsfeld u vor, wobei u die Inkompressibilitatsnebenbedingung∇ · u = 0 erfullen muß.
92
Kij
xi,j xi+1,j
xi+1,j+1xi,j+1
++
+ +
+++
+ + +
+++
−−
−−−
−−−−−
−−
Abbildung 7.1: “Checkerboard mode” als Beispiel eines Drucks p ∈ S0,0(T) mit b(v, p) = 0 fur alleu ∈ (S1,1
0 (T ))2
7.4.2 FEM
Die FEM fur (7.39) lautet: Zu XN ⊂ (H10 (Ω))2 und MN ⊂ L2
0(Ω) ist (uN , pN) ∈ XM ×MN gegeben alsLosung des Problems: Finde (uN , pN ) ∈ XN ×MN , so daß
a(uN , v) + b(v, pN ) = l(v) ∀v ∈ XN (7.41a)b(uN , q) = 0 ∀q ∈MN . (7.41b)
Aus der allgemeinen Theorie aus Abschnitt 7.3.3 (vgl. insb. Satze, 7.18, 7.19) wissen wir, daß die RaumeXN und MN so gewahlt werden mussen, daß die diskrete inf-sup-Bedingung
inf0�=p∈MN
sup0�=v∈XN
b(v, p)‖p‖L2(Ω)‖v‖H1(Ω)
≥ γN > 0 (7.42)
erfullt sein muß. Aus Satz 7.19 sehen wir, daß, falls die diskrete inf-sup-Bedingung (7.42) gilt, wirQuasioptimalitat haben. Es bietet sich deshalb an, die Raume XN und MN so zu wahlen, daß Bestap-proximationsfehler
infv∈XN
‖u− v‖H1(Ω), infq∈MN
‖p− q‖H1(Ω),
auf die gleiche Konvergenzrate fuhren. Dies motiviert z.B. XN = (S1,10 (T ))2 und MN = S0,0(T )∩L2
0(Ω)zu wahlen. Dies Wahl verletzt jedoch die diskrete inf-sup-Bedingung (7.42), wie das folgende Beispielzeigt.
Beispiel 7.26 (Instabiles P1-P0 bzw. Q1-Q0-Element) Sei Ω = (0, 1)2 und T das uniforme Gitterbestehend aus n2 Vierecken der Seitenlange h = 1/n. Sei n gerade. Die Knoten des Gitters seien xij =(ih, jh), i, j = 0, . . . , n. Die Elemente seien mit Kij , i,j = 0, . . . , n− 1 bezeichnet, wobei die Eckpunktevon Kij die Punkte xij , xi+1,j , xi,j+1, xi+1,j+1 sind. Betrachte den Druck p∗ ∈ S0,0(T )∩L2
0(Ω) gegebendurch (cf. Fig. 7.1)
p∗|Kij = (−1)i+j
Wir behaupten: ∫Ω
p∗∇ · u = 0 ∀u ∈ (S1,10 (T ))2;
Somit kann die diskrete inf-sup Bedingung nicht gelten. Um dies einzusehen, schreiben wir u = (v, w)und vkl = v(xkl) und wkl = w(xkl). Dann ist:∫
Kij
p∗ ∇ · u︸ ︷︷ ︸linear auf Kij
= h2p∗|Kij (∇ · u)((i+ 1/2)h, (j + 1/2)h)
=h
2(−1)i+j [vi+1,j+1 + vi+1,j − vi,j+1 − vij + wi+1,j+1 + wi,j+1 − wi+1,j − wij ] ,
93

Wegen u|∂Ω = 0 folgt vij = wij = 0 fur i ∈ {0, n} oder j ∈ {0, n}. Elementare Rechnungen zeigen dann:
∫Ω
p∗∇ · u =n−1∑i,j=0
∫Kij
p∗∇ · u
=n−1∑i,j=0
h
2(−1)i+j [vi+1,j+1 + vi+1,j − vi,j+1 − vij + wi+1,j+1 + wi,j+1 − wi+1,j − wij ] = · · · = 0.
Bemerkung 7.27 Beispiel 7.26 ist “kunstlich” im folgenden Sinn: verschiebt man nur einen Knoten einbißchen, so ist
inf0�=p∈S0,0∩L2
0(Ω)sup
0�=v∈(S1,10 )2
b(v, p)‖p‖L2(Ω)‖v‖H1(Ω)
=: γN > 0.
Jedoch ist typischerweise γN = O(h), so daß man nicht mit Konvergenz des Verfahrens rechnen kann(vergleiche Satz 7.19!).
Es gibt zahlreiche Kombinationen von Raumen XN zur Approximation des Geschwindigkeitsfeldes undMN zur Approximation des Druckes, die die diskrete inf-sup-Bedingung (7.42) erfullen. Wir stellen nun2 solche Kombinationen vor.
Satz 7.28 (Taylor-Hood-artiges Element) Sei T regulare, γ-formregulare, affines Triangulierungvon Ω. Sei
XN :=(S2,1
0 (T ))2
, MN := S0,0(T ) ∩ L20(Ω).
Dann gilt: Es existiert eine Konstante γ > 0, welche nur von der Formregularitatskonstante γ und demGebiet Ω abhangt, so daß
inf0�=p∈MN
sup0�=u∈XM
b(u, p)‖p‖L2(Ω)‖u‖H1(Ω)
≥ γ > 0.
Beweis: Wir verwenden Lemma 7.22. Hierzu wahlen Π1 : (H10 (Ω))2 → XN = (S1,1
0 (T ))2 als denkomponentenweisen Clementinterpolanten aus Satz 6.3. Insbesondere gilt dann:
‖u− Π1u‖L2(K) ≤ ChK‖u‖H1(ωK) ∀K ∈ T ,‖Π1u‖H1(Ω) ≤ C‖u‖H1(Ω).
Den Operator Π2 definieren wir elementweise durch folgende Bedingungen:
Π2u ∈ (S2,10 (T ))2 (7.43a)
(Π2u)(V ) = 0 ∀V ∈ N (T ) (7.43b)∫e
Π2u− u = 0 ∀e ∈ E(T ). (7.43c)
Man uberlegt sich leicht, daß Π2 existiert und ein linearer Operator ist. Weiter rechnen wir nun nach:
‖Π2u‖2L2(K) ≤ Ch2
K‖Π2u‖2L2(K) ≤ Ch2
K‖u‖2L2(∂ bK)
≤ Ch2K‖u‖2
H1( bK)= Ch2
K
[‖u‖2
L2( bK)+ |u|2
H1( bK)
]≤ C‖u‖2
L2(K) + Ch2K |u|2H1(K)
|Π2u|2H1(K) ≤ C|Π2u|2H1( bK)≤ C‖Π2u‖2
L2( bK)≤ · · · ≤ C
[h−2
K ‖u‖2L2(K) + |u|2H1(K)
].
Zusammenfassend erhalten wir
‖Π2u‖H1(K) ≤ C[h−1
K ‖u‖L2(K) + |u|H1(K)
]∀u ∈ (H1(K))2.
Somit ergibt sich
‖Π2(Id − Π1)u‖H1(K) ≤ Ch−1K ‖u− Π1u‖L2(K) + C‖u− Π1u‖H1(K) ≤ C‖u‖H1(ωK).
94

Durch Summation uber alle Elemente ergibt sich damit ‖Π2(Id − Π1)u‖H1(Ω) ≤ C‖u‖H1(Ω).Sei nun p ∈MN ⊂ S0,0(T ) und u ∈ (H1
0 (Ω))2. Dann gilt:
b(u− Π2u, p) =∑K
∫K
p∇ · (u− Π2u) =∑K
∫∂K
p(u− Π2u) · nK︸ ︷︷ ︸=0nach Konstr. von Π2
−∫
K
∇p︸︷︷︸=0
(u − Π2u) = 0.
�
Ubung 7.29 Falls die exakte Losung (u, p) ∈ (H10 (Ω))2 × L2
0(Ω) hinreichend glatt ist, welche Konver-genzrate erwarten Sie fur die Fehler ‖u− uN‖H1(Ω) und ‖p− pN‖L2(Ω)? �
Satz 7.30 (MINI-Element) Sei T regulare, γ-formregulare, affines Triangulierung von Ω. Sei B3 :={u ∈ H1(Ω) |u|K ◦ FK ∈ span{b3}}, wobei b3 die kubische “Blasenfunktion” b3(ξ, η) := ξη(1− ξ − η) aufdem Referenzdreieck K ist. Sei
XN :=(S1,1
0 (T ) +B3
)2
, MN := S1,1(T ) ∩ L20(Ω).
Dann gilt: Es existiert eine Konstante γ > 0, welche nur von der Formregularitatskonstante γ und demGebiet Ω abhangt, so daß
inf0�=p∈MN
sup0�=u∈XM
b(u, p)‖p‖L2(Ω)‖u‖H1(Ω)
≥ γ > 0.
Beweis: Wir verwenden wiederum Lemma 7.22. Sei Π1 wiederum der Clementinterpolationsoperator ausSatz 6.3. Den Operator Π2 definieren wir elementweise wie folgt: Die Blasenfunktionen bK := b3 ◦ F−1
K
erfullen supp bK ⊂ K und B3 = span{bK |K ∈ T }. Wir setzen
Π2u|K :=1∫
KbK
bK
( ∫K u1∫Ku2
),
wobei u = (u1, u2). Dann gilt:
Π2 : (H10 (Ω))2 → B2
3 ist ein linearer Operator‖Π2u‖L2(K) ≤ C‖u‖L2(K) ∀K ∈ T‖Π2u‖H1(K) ≤ Ch−1
K ‖u‖L2(K) ∀K ∈ T .
Somit folgt genau wie im Beweis von Satz 7.28, daß ‖Π2(Id − Π1)u‖H1(Ω) ≤ C‖u‖H1(Ω). Weiter ist furp ∈ S1,1(T ):
b(u− Π2u, p) =∫
Ω
p∇ · (u− Π2u) =∫
∂Ω
p(u− Π2u)︸ ︷︷ ︸=0 wg. Randbed.
−∫
Ω
∇p(u − Π2u)
=∑K∈T
∫K
∇p|K︸ ︷︷ ︸=konst.
·(u− Π2u) Konstr. von Π2= 0
�
Ubung 7.31 Welche Konvergenzraten erwarten Sie fur das MINI-Element? �
Bemerkung 7.32 Dem Taylor-Hood-artigen Element und dem MINI-Element ist gemeinsam, daß ein“Standardraum” fur den Druck gewahlt wird (stuckweise konstante Funktionen oder stetige, stuckweiselineare Funktionen). Der Raum XN fur das Geschwindigkeitsfeld wird dann hinreichend groß gewahlt,um die diskrete inf-sup-Bedingung zu gewahrleisten. Daß dies im Prinzip geht, folgt aus der Tatsache,daß XN ⊂ X und MN ⊂M und daß die kontinuierliche inf-sup-Bedingung gilt:
inf0�=p∈MN
sup0�=u∈X
b(u, p)‖p‖M‖u‖X
≥ inf0�=p∈M
sup0�=u∈X
b(u, p)‖p‖M‖u‖X
> 0.
95

Satz 7.33 (Taylor-Hood) Sei T regulare, γ-formregulare, affines Triangulierung von Ω. Sei weiterhinfur jedes Element hochstens eine Kante auf ∂Ω. Sei
XN :=(S2,1
0 (T ))2
, MN := S1,1(T ) ∩ L20(Ω).
Dann gilt: Es existiert eine Konstante γ > 0, welche nur von der Formregularitatskonstante γ und demGebiet Ω abhangt, so daß
inf0�=p∈MN
sup0�=u∈XM
b(u, p)‖p‖L2(Ω)‖u‖H1(Ω)
≥ γ > 0.
Beweis: Unser Ziel: zu gegebenem p ∈MN ein u ∈ XN zu finden, so daß
b(u, p) ≥ γ1‖p‖2L2(Ω), ‖u‖H1(Ω) ≤ γ2‖p‖L2(Ω). (7.44)
Hierzu spalten wir p = p∗ +(p−p∗) auf, wobei p∗ ∈ S0,0(T )∩L20(Ω) durch den elementweisen Mittelwert
von p gegeben ist.1. Schritt: Nach Satz 7.28 existiert eine Konstante γ∗ > 0 und ein u∗ ∈ XN , so daß
b(u∗, p∗) = ‖p∗‖2L2(Ω), ‖u∗‖H1(Ω) ≤
1γ1
‖p∗‖L2(Ω). (7.45)
2. Schritt: Wir betrachten nun das Hilfsproblem, ein u ∈ XN zu finden, so daß
b(u, p) ≥ C‖p− p∗‖2L2(Ω), ‖u‖H1(Ω) ≤
1γ‖p− p∗‖L2(Ω), (7.46)
fur Konstanten, C, γ > 0, die nur von der Formregularitat von T abhangen. Wir werden diese Abschatzungim 3. Schritt beweisen. Unter der Annahme, daß (7.45), (7.46) gelten, konnen wir die inf-sup-Bedingungbeweisen: Zu gegebenem p ∈ MN machen wir nun den Ansatz u = u∗ + δu fur das gesuchte u, welches(7.44) erfullen soll; hier ist δ > 0 ein Parameter, den wir spater noch festlegen werden. Wir berechnenmittels (7.45), (7.46)
‖u‖H1(Ω) ≤ ‖u∗‖H1(Ω) + δ‖u‖H1(Ω) ≤ C[‖p∗‖L2(Ω) + δ‖p− p∗‖L2(Ω)
]≤ C(1 + δ)‖p‖L2(Ω),
b(u, p) = b(u∗ + δu, p) = b(u∗, p∗) + b(u∗, p− p∗) + δb(u, p)
≥ ‖p∗‖2L2(Ω) − ‖u∗‖H1(Ω)‖p− p∗‖L2(Ω) + δC‖p− p∗‖2
L2(Ω)
≥ ‖p∗‖2L2(Ω) −
1γ1
‖p∗‖H1(Ω)‖p− p∗‖L2(Ω)︸ ︷︷ ︸≤ 1
2 ‖p∗‖2L2(Ω)
+ 12
1γ21‖p−p∗‖2
L2(Ω)
+δC‖p− p∗‖2L2(Ω)
≥ 12‖p∗‖2
L2(Ω) + ‖p− p∗‖2L2(Ω)
(−1
21γ21
+ δC
).
Wahlt man nun δ > 0 so, daß δC = 1γ21, so ergibt sich
b(u, p) ≥ C[‖p∗‖2
L2(Ω) + ‖p− p∗‖2L2(Ω)
]= C‖p‖2
L2(Ω).
3. Schritt: Wir beweisen nun (7.46). Hierzu nutzen wir p ∈ H1(Ω) aus:
b(u, p) =∑K∈T
∫K
p∇ · u = −∑K∈T
∫K
u∇p
Wir definieren nun u ∈ S2,10 (T ). Seien hierzu ϕV ∈ S1,1(T ) die Hutfunktionen und fur jede Kante
e ∈ E(T ) die Funktion ϕe ∈ S2,1(T ) die zur Kante e gehorige Kantenfunktion; wir normalisieren ϕe so,daß ϕe(me) = 1 ist, wobei me der Mittelpunkt der Kante e ist. Wir schreiben
u =∑
V ∈N (T )
uV ϕV +∑
e∈E(T )
ueϕe.
Fur die Vektoren uV , ue ∈ R2 fordern wir nun:
96

1. uV = 0 fur alle V ∈ N (T ), d.h. u(V ) = 0 fur alle Knoten V ∈ N (T ).
2. fur jede Kante e wahlten wir eine Orientierung und bezeichnen mit te den Richtungsvektor (Lange1) dieser Kanten. Wir setzen dann ue := −h2
e(te · ∇p(me))te fur jede innere Kante e und ue :=0 fur jede Kante e ⊂ ∂Ω. Wir bemerken, daß diese Definition sinnvoll ist, da te · ∇p(me) dieTangentialableitung von p darstellt, welche aufgrund der Stetigkeit von p (p ∈ H1(Ω)!) wohldefiniertist.
Damit ist ue elementweise gegeben durch
u|K =∑
e∈E(K):e�⊂∂Ω
−h2e(te · ∇p(me))teϕe|K
und wir konnen mittels einer inverse Ungleichung wegen (p− p∗)|K ∈ P1 die Norm von u|K abschatzen:
‖u‖H1(K) ≤ C‖u‖H1( bK) ≤ C∑
e∈E(K)
h2e|∇p(me)| ≤ ChK‖∇p‖L2(K) ≤ C‖p− p∗‖L2(K). (7.47)
Um einzusehen, warum u so gewahlt wurde, bemerken wir, daß eine einfache Rechnung zeigt:∫K
ϕe(x) dx =13|K| ∀e ∈ E(K).
Damit ergibt sich, weil ∇p|K konstant ist:
−∫
K
u · ∇p = −13|K|
∑e∈E(K):e�⊂∂Ω
−h2e(te · ∇p(me))te · ∇p(me)
=13|K|
∑e∈E(K):e�⊂∂Ω
h2e|te · ∇p(me)|2
Nach Voraussetzung hat K mindestens zwei innere Kanten. Weil die zugehorigen Tangentenvektorenlinear unabhangig sind, schließen wir
−∫
K
u · ∇p =13|K|
∑e∈E(K):e�⊂∂Ω
h2e|te · ∇p(me)|2 ≥ h2
e|K| |∇p|2 ≥ Ch2K‖∇p‖2
L2(K).
Wiederum weil ∇p|K konstant ist, schließen wir weiter mit der 2. Poincareungleichung ‖p− p∗‖L2(K) ≤ChK‖∇p‖L2(K). Somit ergibt sich
−∫
K
u · ∇p ≥ C‖p− p∗‖2L2(K).
Insgesamt erhalten wir also durch Summation uber alle Elemente:
b(u, p) ≥ C‖p− p∗‖2L2(Ω), ‖u‖H1(Ω) ≤ C‖p− p∗‖L2(Ω). (7.48)
�
7.5 weitere Bemerkungen zu gemischten Methoden
Gemischte Methoden konnen auch dann sinnvoll sein, wenn eine Diskretisierung es schwer macht, kon-forme Elemente zu erzeugen. Wir fuhren das am Beispiel der biharmonischen Gleichung vor:
−Δ2u = = f auf Ω, (7.49a)u = 0 auf ∂Ω (7.49b)
∂nu = 0 auf ∂Ω (7.49c)
97
Die “klassische” Variationsformulierung ist:
Finde u ∈ H20 (Ω), s.d.
∫Ω
ΔuΔv =∫
Ω
fv ∀v ∈ H20 (Ω). (7.50)
Will man eine FEM auf (7.50) basieren, so muß man Ansatzraume XN ⊂ H20 (Ω) konstruieren. Man
uberlegt sich jedoch recht einfach, daß, falls XN ein Raum von stuckweise glatten Funktionen ist (z.B.stuckweise Polynome), dann XN ⊂ C1(Ω) sein muß3. Obwohl es moglich ist, H2
0 (Ω)-konforme Raumezu konstruieren4, ist die Konstruktion kompliziert und ihr Einsatz unbeliebt. Einfacher ist es, die Varia-tionsformulierung zu andern. Hierzu fuhren wir die Zusatzvariable σ = Δu ein. Damit ergibt sich: finde(u, σ) ∈ H1
0 (Ω) ×H1(Ω), so daß∫
Ω
∇σ · ∇w =∫
Ω
fw ∀w ∈ H10 (Ω), (7.51a)∫
Ω
∇u · ∇v −∫
Ω
σv = 0 ∀v ∈ H1(Ω) (7.51b)
Ohne auf die FEM-Losungstheorie (und Stabilitat) fur dieses gemischte Problem einzugehen, bemerkenwir, daß hier (u, σ) ∈ H1
0 (Ω) × H1(Ω) gesucht wird, so daß fur die Diskretisierung nur Teilraume vonH1
0 (Ω) ×H1(Ω) benotigt werden.
3xN ∈ XN ⊂ H2(Ω) impliziert, daß ∇xN ∈ H1(Ω)—falls ∇xN stuckweise glatt ist, hatten wir bereits gesehen, daß dies∇xN ∈ C(Ω) impliziert.
4z.B. das Argyris-Element oder das Hsieh-Clough-Tocher-Element
98