EE 2352 — SOLID STATE DRIVES - ELECTRICAL...
15
Click here to load reader
Transcript of EE 2352 — SOLID STATE DRIVES - ELECTRICAL...

EE 2352 — SOLID STATE DRIVES
UNIT-I
PART - A
1. Write the fundamental torque equation of motor load system.
T−T l=dωmdt
=Jdωmdt
+ωmdJdt
where,
J - Moment of Inertiaω - Instantaneous angular velocityT - Developed motor torqueTL - Load (resisting) torque
2. List out the factors to be considered to select a motor to drive the load.
The factors to be considered to select a motor to drive the load are,
i) Steady state operation requirementsii) Transient operation requirements
iii) Requirements related to the sourceiv) Capital and running cost, maintenance needs, lifev) Space and weight restriction
vi) Environment and locationvii) Reliability
3. What are the disadvantages of DC motors?
The disadvantages of DC motors are,
i) Complex in construction, maintenance, since there is presence of commutator and brushes
ii) Higher cost, volume and inertia iii) Unsuitable for explosive and contaminated environmentiv) Restriction on speed and power rating, etc

4. What are the types of load torques?
Active load torque - Load torque which retains its sign though the direction of the drive rotation is changed. Eg. gravitational force, compression and torsion undergone by elastic body.
Passive load torque - Load torque which always oppose the motion and change their sign on the reversal of motion. Eg. friction windage and cutting
5. What is meant by dynamic torque?
The motor torque can be given as the sum of the load torque and the dynamic torque. Mathematically, it is expressed as
T=TL+Jdωmdt
In which Jdωmdt
termed as the dynamic torque, which can be defined as the
torque which will vary with respect to the angular speed (ω) and the moment of inertia (J).
6. When does an equilibrium point be stable in speed-torque plane of motor-load system?
An equilibrium point will be stable when an increase in speed causes load torque to exceed the motor torque, i.e. TL>T
7. Define – Steady State Stability in drive characteristics
Steady state stability is defined as the stability of an equilibrium point from steady state speed curves of the motor and load, in order to avoid the solution of the differential equations valid for transient operation of the drives.
8. What are the three modes of operation for electrical drive?
The three modes of operation for electrical derives are,i) Steady – state mode
ii) Acceleration mode including startingiii) Deceleration mode including stopping
9. What is meant by regenerative braking?
Regenerative braking is a braking of motor on which the energy stored as inertia (after supply is cut-off) will fed towards the source as electrical energy. When the condition below satisfies,
E > V and negative Iawhere,

E - induced emf on stator.(from the inertia)V – Voltage source from supply.
10. What are all the conditions to be satisfied for the regenerative braking operation to take place?
E > V and negative Ia Where,
E - induced emf on stator.(from the inertia)V – Voltage source from supply or armature voltage.
It is possible only when there are load connected to the line and they are in need of power more or equal to the regenerated power.
UNIT II
PART-A
1. Why does the armature voltage control is not preferred for the speeds above the rated value in dc motors?
In the armature voltage control the speed is depend on the voltage applied to the armature and since the voltage cannot be provided above the rated value, the speed is restricted up to base value only and above the base value this type of control is not valid.
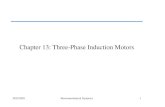
2. Draw the characteristics of torque and power limitations of DC drives operating with combined armature of field control.
3. What is meant by continuous and discontinuous operations?
Continuous conduction operation is called so because of the continuous flow of armature current that i.e., it does not become zero for a finite time interval and the dis-

continuous conduction is called so because the armature current flow is not continuous i.e. armature current reaches zero at certain time intervals.
4. What is the difference between continuous and discontinuous conduction modes?
In Continuous conduction operation flow of armature current is continuous, never attains zero finite time interval here the Vs > E + IaRa should be maintain to pro-vide continuous conduction and in addition if La is small and/or Ia is low and/or α is large then the inductance cannot able to sustain the armature current in positive rather it will fall to zero leads to the discontinuous conduction mode.
5. Write the conditions under which the DC motor operates under continuous current mode.
DC motor will operate in conduction current mode when Vs > E + IaRa is main-tained in addition La should large and/or Ia should large and/or α should small enough to make the inductance to sustain the armature current in conduction mode.
6. What is CLC in chopper fed DC drives?
CLC is termed as the current limit control also known as point by point control. Here the duty ratio of a chopper is controlled indirectly by controlling the load current between certain specific maximum and minimum values i.e. when load current reaches a specific maximum value, the switch disconnect the load from the source from the source and reconnect when it reaches its specified minimum value.
7. What is meant by TRC?
TRC is termed as time ratio control also known as pulse width control. Here the ratio of ON time to chopper period is controlled and it can be classified as constant frequency TRC and variable frequency TRC. In constant frequency TRC the chopper period is kept constant and on time is varied to control the duty ratio and in case of variable frequency TRC duty ratio is varied either by varying chopper period alone or with on time also.
8. What are the applications of chopper fed DC drives?
The applications of chopper fed DC drives are,
i) Speed control of Dc motor in traction and industrial applications
ii) In servos of battery operated vehicles (trolley, fork lift)
iii) In traction unit with separately excited Dc machine replacing the conventional series motor which has several drawback on control aspects and regenerative braking capability
9. What are the merits of four quadrant operation of a converter?

The merits of four quadrant operation of a converter are,
i) It is possible to drive the motor in motoring as well as in generating mode
ii) It is possible to drive the motor in effective regenerative braking mode
iii) It is possible to maintain the motor in stability state during variable loads
iv) Efficient control of motor in both forward and reverse direction.
10. List out the drawbacks of AC-DC converter fed DC drive. The drawbacks of AC-DC converter fed DC drive are,
Low Power factor Ripples in motor current Harmonics in Line Current High Copper loss Distortion is more with discontinuous load current.
UNIT III
DESIGN OF CONTROLLERS FOR DRIVES
PART A
1. What is mechanical time constant of DC machine?
τm =JB
where, τm mechanical time constant
J moment of inertia
B damping coefficient
2. Write the transfer function of converter.
Gc(s) = KC
1+sT C
where, Kc converter gain
Tc converter time delay
S laplace operator

3. What is the role of current limiter in the closed loop control of DC drives?
Current limiter sets current reference for inner current control loop at a value corresponding to the maximum allowable current.
4. What is speed feedback?
The motor speed can be sensed by any one speed sensor and this signal is compared with reference speed. This error signal is given to speed controller. The speed controller produce control signal to the power converter in order to attain the reference speed.
5. What are the advantages of closed loop speed control?The advantages of closed loop speed control are,
System protection Greater accuracy Improved dynamic response Reduced effect of disturbances such as loading
6. What is meant by field weakening mode control?
The DC motor speed can be varied by varying the field current and armature voltage is kept constant. The field current can be controlled by using power converter. By using this method the motor field flux decreases i.e., field weakening mode this method only applicable for above base speed because speed is inversely proportional to flux.
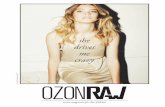
7. Draw the characteristics of maximum torque and power limitations of DC drives operat-ing with combined armature voltage and field control.

8. How is speed feedback achieved in speed controller design?
Speed feedback achieved from speed sensor e.g DC tacho-generator which is
attached to motor shaft.
9. What is the function of inner current control loop closed loop speed control system?
Inner current control loop is provided to limit the converter and motor current or motor torque below a safe limit
10. List out the simulation software packages that can be used for electrical drives. MATLAB/SIMULINK PSIM PSPICE EMTP
UNIT-IVINDUCTION MOTOR DRIVE
PART A
1. List out the merits and demerits of stator voltage control.
Merits
Simple control circuit Compact design Quick response time
Demerits

Efficiency is low since resistance losses are high Poor performance in low speed Efficiency of the system affected by harmonics due to distorted
input voltage
2. What are the drawbacks of stator voltage control method?
At low speed motor current are excessive and special arrangements needed t limit the excessive current
Voltage and current waveforms are highly distorted due to harmonics, which affects the efficiency of the motor
Performances are poor under running condition at low speeds Operating efficiency is low as resistance losses are high
3. What are the various applications of stator voltage control scheme?
The stator voltage control method is suitable for applications where torque demand reduces with speed, which points towards its suitability for
Fan Pump drives
4. What is constant volt/frequency control? When the frequency is reduced, the input voltage must be reduced
proportionally so as to maintain constant flux. Otherwise the core will get saturated resulting in excessive iron loss and magnetizing current. The maximum torque also remains constant under this condition. This type of control is known as constant volt/frequency control. The v/f ratio should be constant. This method ids used for speed control below base frequency
5. Why is the speed control of a 3 phase induction motor with constant supply voltage and reduced supply frequency not preferred?
T α V/f
So if we change only the frequency then it will produce the pulsating torque.
6. Write down the consequences of increasing the frequency of induction motor without a change in the terminal voltage. (MAY/JUNE 2009)
No load speed increases The maximum torque decreases Starting torque decreases Starting current decreases
7. What are the three regions in the speed-torque characteristics of the induction motor?(NOV/DEC 2009)
Motoring region(0≤S≤1)
Generating region(S<0)
Plugging region (1≤S≤2)

8. Compare CSI fed drives and VSI fed drives. (NOV/DEC – 2012, 2011)
SI NO
VOLTAGE SOURCE INVERTER CURRET SOURCE INVERTER
1 Input voltage is maintained constant Input current is maintained constant
2 It requires feedback diodes It does not require feedback diodes
3 VSI is suitable for multi motor drives CSI is not suitable for multi motor drives
4 Low cost High cost
5 Weight and volume is low Weight and volume is high
6 Fast dynamic response Slower dynamic response
9. Define vector control. (NOV/DEC 2011)
Vector control is a control technique applied in AC machines to give DC motor
like performance. In this control technique, stator current is divided into direct
axis current and quadrature axis current. By controlling these currents
individually we can get fast response and increased torque.
10. Write any two advantages of vector control technique. (MAY/JUNE 2012 ,2011)
High torque Precise control
11. What is slip power recovery scheme? (MAY/JUNE 2013)(NOV/DEC 2009, 2010)
In chopper method of speed control for slip ring induction motor, the slip power is wasted in the external resistance and the efficiency also reduced. However, instead of wasting the slip power can be recovered by various schemes for the speed control of slip ring induction motor. This system is called as slip power recovery scheme.
12. What is meant by super synchronous operation? (MAY/JUNE 2013)Super synchronous speed operation means, the no load speed of the motor will be greater than the synchronous speed. In this case injected voltages Vr are reversed. In super synchronous speed mode there are two operations are possible. They are super synchronous motoring and super synchronous regenerative braking.
UNIT 5

Part-A1. When is a synchronous motor said to be self-controlled? (MAY/JUNE 2013)
The synchronous motor is said to be self controlled when the stator supply frequency is changed or controlled so that the synchronous speed is same as rotor speed.
2. Why self controlled synchronous motor is free from hunting operations? (NOV/DEC 2012) (APR/MAY 2010)
When the motor is controlled by variable frequency mode of control the pull out torque will decrease with respect to the increase in the frequency but in self controlled motor the stator frequency is controlled with respect to the rotor frequency which en-sures the synchronous speed for all operating point so rotor cannot pull-out of step hence free from hunting operation
3. Define self-control technique of synchronous motor. (MAY/JUNE 2012). (APR/MAY 2011) (NOV/DEC 2010) (MAY/JUNE 2009)
In self control mode, the stator supply frequency is changed in proportion to the rotor speed so that the rotating field produced by the stator always moves at the speed as that of the rotor
4. Which type of control can be used for constant torque operation in synchronous motor? How? (NOV/DEC 2011)
Open loop V/F control can be used for constant torque application. The ratio be-tween the voltage and the frequency gives the flux in the motor which is responsible for the torque production. Here in this control the ratio between the voltage and frequency is maintained constant for all operating point hence leads constant torque operation.
5. What are the different types of controls used in Synchronous motor drives? (NOV/DEC 2011)
Open loop Volts/Hertz control Self control model Vector control
6. What are the characteristics of self controlled mode operated synchronous motor? (NOV/DEC 2009)
It is designed for power ratings of megawatts and speed approaching 6000 rpm.
It is operated like dc motor (commutator less motor) Better stability behavior No oscillatory behavior
7. What are the different modes of control that exist in a synchronous motor on a variable frequency supply? (NOV/DEC 2009)

True synchronous mode Self-controlled modes(self-synchronous mode)
8. What is meant by margin angle of commutation in the control of synchronous motors? (APR/MAY 2010) (NOV/DEC 2010)
In self controlled synchronous motor drive, the load side converter is operated as an inverter and maximize motor power factor. This control is called constant margin angle control
9. What are the advantages of PMSM? (MAY/JUNE 2013) . (MAY/JUNE 2012) (MAY/JUNE 2009)
Elimination of field copper loss Higher power density Low rotor inertia Robust construction
10. Mention the different types of Permanent Magnet Synchronous Motor. (NOV/DEC – 2012)
According to the construction
Surface mounted PMSM Interior mounted PMSM
According to the nature of voltage induced
Sinusoidally excited Trapezoidally excited