DEES_Antonio Arede_Capitulos 11 a 16
65
António Arêde 101 11.1 DETERMINAÇÃO DE MATRIZES DE AMORTECIMENTO 11.1.1 Formulação Proporcional de Rayleigh A matriz de amortecimento de Rayleigh assume a seguinte hipótese de proporcionalidade à massa e à rigidez: K M C β α = Aplicando o duplo produto pelo modo de vibração genérico n, vem: mas ao nível do modo n, também se escreve: ( ( n n n n T n n T n n T n n K M C K M C C β α φ φ β φ φ α φ φ + = ⇒ + = = n n n cr w M C 2 , = n cr n n C C , = ξ + = + = ⇒ n n n n n n n n n n n w M K w w M K w M M β α β α ξ 2 1 2 2 + = ∴ n n n w w β α ξ 2 1 Casos particulares: • Se β = 0, a matriz C é apenas proporcional à massa logo ξ decresce com a frequência ou com a ordem do modo, o que não tem contrapartida real directa. • Se α = 0, a matriz C é apenas proporcional à rigidez logo ξ cresce com a frequência ou com a ordem do modo, também não é muito realista. 0 1 2 3 4 5 6 7 8 9 10 0 20 40 60 80 100 w (rad/s) % 0 1 2 3 4 5 6 7 8 9 10 0 20 40 60 80 100 w (rad/s) % w α ξ 2 1 = w β ξ 2 1 = 11. ANÁLISE DINÂMICA POR INTEGRAÇÃO DIRECTA NO DOMÍNIO DO TEMPO 11. ANÁLISE DINÂMICA POR INTEGRAÇÃO DIRECTA NO DOMÍNIO DO TEMPO FEUP - 2010
-
Upload
ricardo-goncalves -
Category
Documents
-
view
215 -
download
1
description
dinamica de estruturas
Transcript of DEES_Antonio Arede_Capitulos 11 a 16

António Arêde 101
11.1 DETERMINAÇÃO DE MATRIZES DE AMORTECIMENTO
11.1.1 Formulação Proporcional de Rayleigh
A matriz de amortecimento de Rayleigh assume a segui nte hipótese de proporcionalidade à massa e à rigidez:
KMC βα +=
Aplicando o duplo produto pelo modo de vibração gen érico n, vem:
mas ao nível do modo n, também se escreve:
( ) ( )nnn
n
T
nn
T
nn
T
nn
KMC
KMCC
βαφφβφφαφφ
+=⇒
+==
nnncr wMC 2, =ncr
nn C
C
,
=ξ
+=+=⇒
nn
n
nnn
n
nn
nn wM
K
wwM
K
wM
M βαβαξ2
1
22
+=∴ n
nn w
wβαξ
2
1
Casos particulares:
• Se β = 0, a matriz C é apenas
proporcional à massa logo ξ decresce
com a frequência ou com a ordem domodo, o que não tem contrapartida realdirecta.
• Se α = 0, a matriz C é apenas
proporcional à rigidez logo ξ cresce
com a frequência ou com a ordem domodo, também não é muito realista.
0123456789
10
0 20 40 60 80 100
w (rad/s)
%
0123456789
10
0 20 40 60 80 100
w (rad/s)
%
w
αξ2
1=
wβξ2
1=
11. ANÁLISE DINÂMICA POR INTEGRAÇÃO DIRECTA NO DOMÍNIO DO TEMPO
11. ANÁLISE DINÂMICA POR INTEGRAÇÃO DIRECTA NO DOMÍNIO DO TEMPO
FEUP - 2010

António Arêde 102
No caso geral em que α e β não sejam nulos, o ξ , tem uma variação mista
traduzida pela figura que apresenta um mínimo.
Os coeficientes α e β estabelecem-se então impondo os factores de
amortecimento ξ para dois modos com frequências wi e wj devidamente
escolhidas (frequentemente são as primeiras, não se ndo forçoso que assim seja). Se for então:
mm
nn
wwpara
wwpara
==
ξξ
Resulta o seguinte sistema, do qual se pode calcula r os valores de α e β :
==
⇒
=
⋅
K
K
m
n
m
n
mm
nn
ww
ww
ξξ
ξξ
βα
1
1
2
1
Se o factor de amortecimento for o mesmo ξ para os valores da frequências
escolhidas, vem então as expressões de α e β :
⇒
=
⋅
m
n
mm
nn
ww
ww
ξξ
βα
1
1
2
1
Conforme se observa na figura, fica garantido que o amortecimento está limitado por ξi e ξi, entre as frequências escolhidas.
Fora desse intervalo de frequências o factor ξ cresce amortecendo mais os correspondentes modos.
( )( )
+=+=
mn
mnmn
ww
wwww
ξβξα
2
2
0123456789
10
0 20 40 60 80 100
w (rad/s)
%
wn wm
ξ mξ n
ξ
+= ww
βαξ2
1
FEUP - 2010

António Arêde 103
11.1.2 Formulação Proporcional por Sobreposição de M atrizes Modais
Conforme se definiu: nnnn
T
nn KMCC ξφφ 2==
se se trabalhar com a matriz dos modos Φ [ ]KK
nφ=Φ
vem então a matriz diagonal ΦΦ= CC T* , onde
( )Nn CCCdiagC KK1* =
( ) 1*1 −−ΦΦ= CC TResolvendo em ordem a C , obtém-se
o que requer a inversão da matriz . ΦEste processo pode no entanto ser simplificado, com o seguinte raciocínio. Procedendo de igual modo para a massa modal e defin indo a correspondente matriz diagonal das massas modais:
ΦΦ= MM T* , onde ( )Nn MMMdiagM KK1* =
vem:
( ) MMMMM TT Φ=Φ⇒Φ=ΦΦΦ=Φ−−−− 1*111*
( ) ( ) ( ) ( ) 1*11*1 −−−−Φ=Φ⇒Φ=ΦΦΦ=Φ MMMMM TTTT
e igualmente:
Por substituição na expressão de C , resulta
( ) ( ) MMCMMC ΦΦ=−− 1**1*
expressão que se obtém muito facilmente porque a in versa de M* (matriz
diagonal) é imediata, podendo então escrever-se a s eguinte expressão que resulta da expansão da anterior e que permite espec ificar o amortecimento desejado nos diversos modos, mantendo a sua ortogon alidade em relação à
matriz C :
MM
wMC
N
n
T
nnn
nn
= ∑
=1
2 φφξ
FEUP - 2010

António Arêde 104
11.2 MÉTODOS DE INTEGRAÇÃO DIRECTA NO TEMPO
11.2.1 Fundamentos
As equações de equilíbrio dinâmico são )(tpuKuCuM =++ &&& )(tpuKuCuM =++ &&&
Processos de integração numérica das equações diferenciais
Métodos de integração directa
Sobreposição modal e integração numérica de cada equação de equilíbrio modal desligada
Implícitos – obrigam à inversão da matriz de rigidez
Métodos de integração directa ���� baseiam-se na subdivisão do intervalo tF em intervalos ∆∆∆∆t nos quais se impôem certas aproximações às acelerações ou velocidades
• Conhecendodetermina-se
nn uu &, enu&& (em )nt 11, ++ nn uu & e
1+nu&& (em )tnt ∆+
Explícitos – não requerem inversão da matriz de rigidez
• Conforme o método, assim se estabelece a equação de equilíbrio no passo n
ou n+1 (ou outro), a fim de obter a resposta no passo n+1.
FEUP - 2010

António Arêde 105
11.2.2 Método das diferenças centrais
O equilíbrio é expresso por equações diferenciais q ue podem ser resolvidas pelo método das diferenças finitas, que se baseia na apr oximação das derivadas por meio de diferenças correspondentes a intervalos de tempo discretos.
[ ]ttttt uut
u ∆−∆+ −∆
=2
1& [ ]ttttt uu
tu ∆−∆+ −
∆=
2
1&
E escrevendo a equação de equilíbrio no instante t, obtém-se:
u t∆t- uttu ∆t+
∆t+ tttt-∆
u ∆t- t2
∆ tut+ 2
t-∆ t t ∆t+t
[ ]
[ ]
−∆
=
−∆
=
∆+∆+
∆−∆−
ttttt
ttttt
uut
u
uut
u
1
1
2
2
&
&
[ ]tttttt uuut
u ∆−∆+ +−∆
= 21
2&& [ ]tttttt uuu
tu ∆−∆+ +−
∆= 2
12
&&
tt
tttt
uCt
Mt
uMt
KpuCt
Mt
∆−
∆+
∆−
∆−
−
∆−−=
∆+
∆
2
11
2
2
11
2
22
tt
tttt
uCt
Mt
uMt
KpuCt
Mt
∆−
∆+
∆−
∆−
−
∆−−=
∆+
∆
2
11
2
2
11
2
22
Para iniciar o processo ( t=0) é necessário conhecertu ∆−
Considerando primeiro a aproximação da 1ª derivada:
- no instante t - antes e após t
[ ]22
1ttttt uu
tu ∆−∆+ −
∆= &&&&
Exprimindo a aceleração no instante t :
vem
FEUP - 2010

António Arêde 106
Conjugando as expressões de diferenças finitas de e obtém-se
0
2
00 2u
tutuu t &&&
∆+∆−=∆− 0
2
00 2u
tutuu t &&&
∆+∆−=∆−
Também usa a técnica das diferenças centrais para aproximar as velocidades eacelerações, usando dois valores anteriores, t-∆t e t-2∆t, e um posterior t+∆t,donde se pode obter as expressões:
~ tu&~ tu&&
Neste método é muito útil quando e são diagonais já que pode ser
obtido sem inversão de matrizes – Método Explícito.
Nessas condições, também não é necessário agrupar a s matrizes de rigidez dos vários elementos porque a sua contribuição no 2º me mbro pode ser obtida elemento a elemento.
Principal inconveniente: ⇒⇒⇒⇒ Método de estabilidade condicionada
M C ttu ∆+
critt ∆∆ <
11.2.3 Método de Houbolt
−+−∆
= ∆−∆−∆+ ttttttt uuut
u 22918116
1&
−+−∆
= ∆−∆−∆+ ttttttt uuut
u 22918116
1&
−+−∆
= ∆−∆−∆+∆+ ttttttttt uuuut
u 22452
1&&
−+−∆
= ∆−∆−∆+∆+ ttttttttt uuuut
u 22452
1&&
tttt
ttttt
uCt
Mt
uCt
Mt
uCt
Mt
puKCt
Mt
∆−∆−
∆+∆+
∆+
∆+
∆+
∆−
−
∆+
∆+=
+∆
+∆
222
22
3
11
2
34
35
6
112
tttt
ttttt
uCt
Mt
uCt
Mt
uCt
Mt
puKCt
Mt
∆−∆−
∆+∆+
∆+
∆+
∆+
∆−
−
∆+
∆+=
+∆
+∆
222
22
3
11
2
34
35
6
112
• Para o arranque pode usar-se outro algoritmo (ex.: diferenças centrais);
• É necessário inverter a matriz – Método implíci to
• ∆∆∆∆t pode ser qualquer ���� método incondicionalmente estável
• Fazendo nula a massa e amortecimento pode-se resolve r problemas estáticos
K
Exprime-se o equilíbrio no intante t+∆∆∆∆t para determinar resultando em:ttu ∆+
FEUP - 2010

António Arêde 107
11.2.4 Método de Wilson- θθθθ
Hipótese: Variação linear de acelerações entre t e t+θ∆θ∆θ∆θ∆t com θθθθ > 1.0.
u ∆t+ t θ∆ut+ t
ut
t+∆ tt t+θ∆tτ
Integrando, obtém-se
( )ttttt uut
uu &&&&&&&& −∆
+= ∆++ θτ θτ
Fazendo ττττ = θ∆θ∆θ∆θ∆t
( )tttttt uut
uuu &&&&&&&& −∆
++= ∆++ θτ θττ
2
2
( )ttttttt uut
uuuu &&&&&&& −∆
+++= ∆++ θτ θτττ
62
1 32
( )tttttt uut
uu &&&&&& +∆+= ∆+∆+ θθθ2
( )ttttttt uut
utuu &&&&& 26
22
+∆+∆+= ∆+∆+ θθθθ
(1)
(2)
(3)
(4)
(5)
Pode determinar-se ttu ∆+θ& e em função dettu ∆+θ&& ttu ∆+θ
O equilíbrio é estabelecido no instante t + θ∆θ∆θ∆θ∆t, o que requer projectar
para esse instante.t
p
( ) ( ) ( ) ( )[ ]tpttptpttpptt
−∆++=∆+=∆+
θθθ
(6)
FEUP - 2010

António Arêde 108
• É necessário inverter a matriz K ���� Método implícito
• Não necessita de procedimento especial para o arranque
• Fazendo nula a massa e amortecimento pode-se resolve r problemas estáticos
• O procedimento é incondicionalmente estável quando θθθθ > 1.37 (de um modogeral faz-se θθθθ = 1.4)
Este método é análogo ao Método de Wilson- θθθθ, admitindo também umahipótese de variação linear das acelerações condicionada p or doisparâmetros, de tal forma que após integração corresponde às duasseguintes expressões para as velocidades e deslocamentos:
( ) tuuuu tttttt ∆
+−+= ∆+∆+ &&&&&& δδ1
( ) 25.0 tuutuuu ttttttt ∆
+−+∆+= ∆+∆+ &&&&& αα
11.2.5 Método de Newmark
⇒⇒⇒⇒ substituindo em (1), (2) e (3) para obtém-se
Substitui-setttttt puu
∆+∆+∆+ θθθ ,, &&& na equação de equilíbrio para t + θ∆θ∆θ∆θ∆t
⇒⇒⇒⇒ determina-se ttu ∆+θ , que, substituído em (5), permite obter
t∆τ =
ttu ∆+θ&&
ttu ∆+θ&& tttttt uuu ∆+∆+∆+ &&& e,
δ e α são parâmetros que podem ser determinados de modo a obter-seprecisão e estabilidade no processo de integração.
Newmark propôs:4
1;
2
1 == αδ
Exprime-se em função de e, impondo o equilíbrio noinstante t+∆t, e determina-se que permite conhecer toda a respostanesse instante e avançar para o seguinte.
tttt uu ∆+∆+ &&& e ttu ∆+
ttu ∆+
FEUP - 2010

António Arêde 109
– Leitura valores iniciais
– Leitura das características da solicitação
– Cálculo de matrizes M, C e K
– Definição da lei de variação das forças exteriores ou de ace lerograma
– Cálculo do valor das forças nodais em t0
– Cálculo da matriz de rigidez efectiva
Duas partes:
1 – Cálculos iniciais
( ) tAtAt
AA
At
At
At
A
∆δδ∆αδ∆
αδ
α∆α∆αδ
∆α
=−=
−=−=
−====
7654
32120
;1;22
;1
12
1;
1;;
1
CAMAKK eff 10 ++=
11.2.6 Algoritmo típico para Integração pelo Método de Newmark
000 , uuu &&& e
2 – Em cada intervalo de tempo
( ) ( )tttttttttteffuAuAuACuAuAuAMff &&&&&& 541~320,
++++++=∆+∆+
– Preparação do vector de solicitação efectiva
– Cálculo de , necessários para o passo seguinte
– Cálculo das tensões e esforços nos pontos que interessam
– Agrupamento das matrizes de rigidez (só no primeiro interva lo detempo) e resolução do sistema de equações.
ttefftteff fuM∆+∆+ =
,
1 – Cálculos iniciais
2 – Em cada intervalo de tempo determinam-se e prepara-se o vector solicitação para o instante t+2∆t
ttu ∆+
tttt uu ∆+∆+ &&& e
FEUP - 2010

FEUP - 2010 António Arêde 110
12.1 ASPECTOS BÁSICOS PARA SISTEMAS LINEARES
12.1.1 Relação excitação-resposta. Matriz das funções de transferência
Em sistemas de 1 g.l. foi obtida a seguinte relação no domínio da frequência:
)()()( wPwHwU ⋅= (1)
onde:
( ) dtetpwP twi
t
−∞
−∞=∫=)(
���� transformada directa de Fourier da solicitação p(t)
(2)
( ) dtetuwU twi
t
−∞
−∞=∫=)(
���� transformada directa de Fourier da resposta u(t)
(3)
wcimwkwwiww
kwH
+−=
+−= 22
12)(1
/1)(
ξ
���� função de transferência
(4)
que, uma vez calculadas as funções complexas do 2º membro, pe rmite obter afunção resposta do deslocamento no domínio do tempo através datransformada inversa de Fourier, dada por:
( ) ( )wde
wUtu twi
w∫∞
−∞==
π2(5)
A amplitude e ângulo de fase podem ser calculadas a través das expressões:
[ ] ( )
−−=
+−=
2222 )(1
2)(,
2)(1
/1)(
ww
wwatanw
wwww
kwH
ξϕξ
(6)
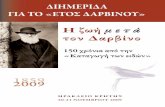
cujo traçado se ilustra na Figura 1 para vários nív eis de amortecimento:
12. ANÁLISE DINÂMICA COMPLEXA NO DOMÍNIO DA FREQUÊNCIA
12. ANÁLISE DINÂMICA COMPLEXA NO DOMÍNIO DA FREQUÊNCIA

António Arêde 111
Os mesmos conceitos e relações similares podem ser estabelecidas para sistemas de N graus de liberdade, mas em termos mat riciais (ver Caetano, E., 1992, Tese de Mestrado em Estruturas de Eng.ª Civil , FEUP):
(7)
onde:
���� é um vector de N componentes, funções complexas que definem a resposta de deslocamentos no domínio da frequência, cada uma consistindo na transformada di recta de Fourier da resposta u i(t);
(8)
Porém, a obtenção desta matriz com recurso a esta ex pressão é muito pouco eficiente, devido à necessidade de inverter uma mat riz para cada frequência.
)()()(~~~
wPwHwU ⋅=
{ })()(~
wUwU i=
{ })()(~
wPwP j= ���� é um vector de N componentes, funções complexas que definem solicitação no domínio da frequência, cada uma das quais consistindo na transformada directa de Fourie r da solicitação p j(t);
)(~
wH���� é a matriz de NxN componentes, cada uma das quais ,
consistindo na função de transferência entre a soli citação no grau de liberdade j e a resposta (deslocamento) no grau de liberdade i.
( ))(wH ij
Formalmente, a matriz pode ser obtida por uma expressão análoga a (4): )(~
wH
( ) 1
~~
2
~~)(
−+−= CwiMwKwH
O pico do espectro de amplitude fornece a frequênci a natural da estrutura.
Este ângulo de fase ( φ) é o mesmo ( α) da resposta a solicitações harmónicas, amenos do sinal negativo que no caso de α não aparecia por ser no sentidooposto ao ângulo directo wt .
Figura 1 – Espectros de Fourier em amplitude (a) e fase (b) de u m sistemade 1 g.l. em função da frequência normalizada ( ) (extraído deCaetano, E., 1992, Tese de Mestrado em Estruturas de Eng.ª Ci vil, FEUP).
rfwfw →→ ;
FEUP - 2010

António Arêde 112
A matriz das funções de transferência pode ser obtida recorr endo ao métodode sobreposição modal que fornece um meio mais simples de det erminar cadaum dos termos daquela matriz.
De facto, considerando cada uma das N equações de e quilíbrio desligadas no espaço modal dadas por:
pode definir-se a função de transferência entre a s olicitação modal Fk(t) e a
resposta modal yk(t) por aplicação da expressão (4), substituindo cada u m dos
termos nela envolvidos pelos correspondentes ao mod o k. Ou seja, fazendo:
(9)( )tFyKyCyM kkkkkkk =++ &&&
22;;//; kkkkkkk wMKwmkwwrwwrww =→=ξ→ξ=→=→
a expressão (4), que também pode ser escrita do mod o seguinte:
wwiww
m
wwiww
kwH
ξξ 2/1
2)(1/1
)( 222 +−=
+−=
assume o aspecto que se segue para a resposta moda l yk(t) :
wwiww
M
wwiww
KwH
kkk
k
kkk
kyk
ξξ 2
/1
2)(1
/1)(
222 +−=
+−=
e representa a função de transferência associada ao modo k.
(10)
(11)
12.1.2 Obtenção da Matriz das funções de transferênc ia por sobreposição modal
A passagem desta função do espaço modal para o espa ço físico, é feita com recurso aos modos de vibração através da seguinte o peração matricial:
(12)~~~~
)()( TywHwH Φ⋅⋅Φ=
FEUP - 2010

António Arêde 113
que, graficamente, para um sistema de 2 g.l. aprese ntam o aspecto seguinte:
em que é uma matriz diagonal (NxN) com os N termos (complexas) na diagonal principal e a matriz consiste na matriz dos modos de vibração (cada coluna é um modo).
A expansão da forma matricial expressa por (11), dá então origem a cada uma das N2 funções de transferência em termos de quantidades modais, expressa da seguinte forma:
)(~
wHy
)(wHyk
~Φ
)(wH ij
(13)),,1(,),,1(2
)(1
22 NjNiwwiww
wHN
k kkk
jkikij KK ==
+−⋅
=∑= ξ
φφ
Tal como nos sistemas de 1 g.l., cada uma das funçõ es complexas fica caracterizada pela sua amplitude e ângulo de fa se dados por
)(wH ij
[ ] ( )
−−=
+−
⋅=
2222 )(1
2)(,
2)(1)(
k
kkij
kkk
jkikij
ww
wwatanw
wwwwwH
ξϕξ
φφ
Figura 2 – Espectros de Fourier em amplitude e fase de um siste ma de 2 g.l.em função da frequência ( ) (adaptado de Caetano, E., 1992, Te se deMestrado em Estruturas de Eng.ª Civil, FEUP).
fw →
FEUP - 2010

António Arêde 114
Os picos revelam as frequências associadas aos dois modos de vibração daestrutura (correspondem às ressonâncias) e a fase varia mai s ou menosabruptamente de 180º (conforme o valor do amortecimento), p assando por 90ºexactamente para a ressonância com cada uma das frequências estruturais.Este par de figuras designa-se habitualmente por gráficos d e Bode. O espectrode amplitudes também pode ser expresso em termos de coordena daslogarítmicas assumindo o aspecto:
Figura 3 – Espectros logarítmicos de Fourier em amplitude de um sistemade 2 g.l. em função da frequência ( ) (adaptado de Caetano, E., 1992,Tese de Mestrado em Estruturas de Engenharia Civil, FEUP).
fw →
A determinação de frequências próprias de vibração de cada u m dos modospode então ser feita com recurso ao traçado das funções de tra nsferência dosistema (as várias componentes da matriz ).
A obtenção experimental destas pode ser feita por diversos m étodos quevariam consoante se conhece apenas a solicitação (input-on ly methods) ouapenas a resposta (output-only methods) ou ambas (input-ou tput methods).
)(~
wH
FEUP - 2010

António Arêde 115
Há diversos métodos para fazer a identificação das caracterí sticas dinâmicasde sistemas de N g.l. (Caetano, E. 1992, Tese de Mestrado), de signadamente osmétodos de 1 g.l. e os métodos de N g.l., mas aborda-se aqui ape nas um dosmétodos do 1º grupo, o método da amplitude de pico (Peak-pick ing) porventurao de mais simples compreensão e mais divulgado, que tem apres enta bonsresultados quando as diversas frequências estão suficient emente afastadas.
12.2 APLICAÇÃO À IDENTIFICAÇÃO DE CARACTERÍSTICAS D INÂMICAS DE SISTEMAS DE VÁRIOS GRAUS DE LIBERDADE
O método da amplitude de pico baseia-se na premissa de que na v izinhança deum modo, a resposta é predominantemente dominada por esse me smo modo(designado o modo ressonante).
Nesse caso, a Função de Resposta em Frequência (FRF), ou funç ão detransferência, pode ser aproximada por uma outra de um siste ma equivalentede 1 g.l. apenas com a mesma frequência e amortecimento do mod oressonante.
Na prática, isso significa dizer que, na vizinhança d e um modo de vibração k,
se admite a seguinte aproximação (Caetano, E. 1992, Tese de Mestrado):
(14)
que, para factores de amortecimento pequenos como os que exi stem emestruturas de engenharia civil, fornece uma via de estimar f requências,amortecimentos e componentes de deslocamento modais (ou se ja, os modosde vibração).
De acordo com (Caetano, E. 1992, Tese de Mestrado), esse processo envolve então as seguintes tarefas:
wwiwwwwiwwwH
kkk
jkikN
k kkk
jkikij
ξφφ
ξφφ
22)( 22
122 +−
⋅≅
+−⋅
=∑=
a) Determinar abcissas correspondentes aos picos de amplit ude das FRF,para estimar as frequências wk do sistema e registar os correspondentesvalores de amplitude.
b) Uma vez conhecidos os valores de w k e correspondentes amplitudes,adoptar o método da ½ potência (half-power bandwidth method ) já vistona resposta de um sistema de 1 g.l. a solicitações harmónicas para obtero amortecimento. O método consiste então em estimar as frequ ências w 1k
e w2k, em torno de w k, para as quais a respectiva amplitude é igual à depico dividida por .2
FEUP - 2010

António Arêde 116
(15)
da qual se pode tirar a amplitude máxima
O factor de amortecimento pode então ser estimado p or:
k
kkk w
ww
212 −≅ξ
c) Com base nos valores de wk e de ξk, pode-se estimar os valores das amplitudes e da configuração deformada relativa ao modo k. De facto, tirando partido de na ressonância com cada m odo se ter , a expressão (14) resulta em
ikφ jkφ
kww ≅
(16)22)(
kk
jkikkij
wiwH
ξφφ ⋅
≅
Os mesmos conceitos e relações similares podem ser estabelecidas para sistemas de N graus de liberdade, mas em termos mat riciais:
(17)
que é o valor que se mede no pico do gráfico da FRF em termos dedeslocamentos.
Pretendendo-se uma FRF em termos de acelerações, como é mais habitualobter a partir de análise experimental, aquela resposta com plexa pode serderivada duas vezes o que corresponde a multiplicá-la por ( iw )2; em termos deamplitude (em valor absoluto) corresponde a multiplicar ex pressão (17) por w2,obtendo-se então:
2max,max 2)(
kk
jkik
kijkij
wHwH
ξφφ ⋅
≅=
(18)
k
jkik
kk
jkikkacel
kij
w
wH
ξφφ
ξφφ
22 2
2
max,
⋅=
⋅≅
FEUP - 2010

António Arêde 117
ou seja, as diversas componentes i e j de um dado modo de vibração k,relacionam-se com o factor de amortecimento modal ξk e com as amplitudesmáximas da FRF que relacionam essas mesmas componentes ( i e j) através de:
(19)
Este procedimento sucessivo para as várias funções de trans ferência permiteobter as amplitudes das componentes modais.
O correspondente sinal, obtém-se observando o ângulo de fas e. Valores de α
próximos de 0º significam sinal positivo, enquanto que valo res próximos de180º significam valor negativo (ou o contrário no caso de se e star a utilizar aconvenção do ângulo ).
(21)
acel
kijkjkik H
max,2ξφφ ≅⋅
Tratando- se da FRF dum dado g.l. i nele próprio ( i = j), resulta:
(20)acel
kiikik H
max,2ξφ ≅
que pode ser obtida por leitura do pico no gráfico de correspondente à frequência wk.
Os restantes valores , podem ser obt idos da leitura na correspondente função de transferência , por leitur a do pico associado à frequência wk, e recorrendo a (19) e (20) calcular:
acel
ii wH )(
)( ijjk ≠φacel
ij wH )(
ik
acel
kijk
jk
H
φ
ξφ max,
2≅
ϕ
FEUP - 2010

António Arêde 118
13. RESPOSTA A ACÇÕES SÍSMICAS DE SISTEMAS COM N GRAUS DE LIBERDADE
13. RESPOSTA A ACÇÕES SÍSMICAS DE SISTEMAS COM N GRAUS DE LIBERDADE
13.1 EQUAÇÃO DE EQUILÍBRIO DINÂMICO
A generalização da equação de equilíbrio dinâmico de sistem as de 1 g.l.sob solicitação sísmica, agora para sistemas de N g.l. (por e xemplo de umpórtico com massa concentrada nos pisos) conduz a
0=++ uKuCuM t&&& 0=++ uKuCuM t&&&
e atendendo a que
gt uuu &&&&&& 1+=
effpuKuCuM =++ &&&Resulta:
e 1 representa uma matriz coluna de valores
unitários (influência pseudo-estática).
gt uuu 1+=
e que
Se além da componente horizontal o movimento da base tiver co mponentevertical simultânea, há que considerar também graus de libe rdade verticaisna estrutura onde se desenvolvem acelerações e forças de iné rcia verticais.
Nesse caso, o vector dos deslocamentos e acelerações totais escrevem-se:
ZX gZgXt uuuu 11 ++=
ZX gZgXt uuuu &&&&&&&& 11 ++=
onde a componente horizontal é considerada na direcção X e a vertical nadirecção Z, surgindo então as matrizes coluna seguintes:
� 1X com valores unitários nos g.l. horizontais ( X) e nulos nos restantes
� 1Z com valores unitários nos g.l. verticais ( Z) e nulos nos restantes
ZX gZgX uMuMuKuCuM &&&&&&& 11 −−=++
Resulta então a seguinte equação, apenas modificada no 2º me mbro:
onde as matrizes e vectores incluem agora novos termos para os g.l. X e Z.
geffuMp &&1−=em que
FEUP - 2010

António Arêde 119
13.2 ANÁLISE MODAL
em que, conforme se tem uma ou duas componentes de acção sísmi ca, seobtém
efnnnnnnn FyKyCyM =++ &&&
efnnnnnnn FyKyCyM =++ &&&
De acordo com o que foi visto no método de sobreposição modal, a
equação de equilíbrio dinâmico associada ao modo de vibraçã o n é
gT
n
efn u
nL
MF &&
3211φ=
sendo Ln o Factor Modal de Excitação Sísmica para o modo n (com os
respectivos sub-índices X e/ou Z conforme as componentes da acção.
gngn
nnnnnn uu
M
Lywywy
n&&&&&&& ΓΓΓΓ==++ 22ξ
Z
Z
X
X
gZT
ngXT
n
efn uMuMF
nLnL
&&43421
&&43421
11 φφ +=ou
Dividindo pela massa modal, obtém-se
n
nn M
L=ΓΓΓΓcom
onde Γn representa o Factor de Participação Modal da acção sísmica no
modo n.
Novamente, no caso de duas componentes da acção, virá:
gngnnnnnn uuywywyZXn&&&&&&& ΓΓΓΓΓΓΓΓ +=++ 22ξ
nnn MLXX
=ΓΓΓΓ
com
nnn MLZZ
=ΓΓΓΓ
Factor de participação modal da acção
sísmica X no modo n
Factor de participação modal da acção
sísmica Z no modo n
Estes factores de participação modal (adimensionais) fornecem já umaindicação da contribuição de cada modo na resposta sísmica, pelo que,uma análise do valor relativo entre eles (no conjunto de todo s os modos)permite fazer uma selecção prévia de quais podem ser desprezáv eis.
13.2.1 Resposta e parâmetros modais básicos
FEUP - 2010

António Arêde 120
A resolução do sistema de um grau de liberdade sujeito a uma ac eleraçãosísmica na base
guuwuwu &&&&& =+ξ+ 22
conduziu a Sd(w,ξ), que representa o deslocamento relativo máximo que
pode ser obtido no espectro de resposta.
Assim, a equação para o modo de vibração n conduzirá ao valor máximo
da correspondente coordenada modal dado por
que permite então obter o vector dos deslocamentos modais má ximos, bemcomo o das correspondentes pseudo-acelerações totais dada s por
( ) ( )nnan
nndnn wSw
wSyn
ξξ ,,2max,
ΓΓΓΓΓΓΓΓ ==
O processo mais corrente para obter a máxima resposta total a partir dosvalores espectrais é calcular a raiz quadrada da soma dos qua drados dasrespostas modais, designado de CQS (Combinação Quadrática Simples) oude SRSS (em inglês). A aplicação a uma dada componente j do vector dosdeslocamentos conduz à seguinte expressão do seu valor máxi mo absoluto:
∑=
=++=N
njnjNj2j1j uuuuu
1
2max,
2max,
2max,
2max,max, K
max,max, nnn yu φ= ( )nnannnnnt wSywun
ξφφ ,max,2
max,ΓΓΓΓ==&&
O mesmo processo deve ser adoptado para toda e qualquer quant idade Q
cujo valor máximo Qn,max no modo n, se pode obter a partir do vector de
deslocamentos (ou acelerações) máximos do mesmo modo.
Tal quantidade Q pode ser uma reacção, um esforço, um deslocamento
relativo, uma rotação, etc., e o correspondente valor máxim o Qmax é obtido
segundo a mesma regra adoptada para os deslocamentos, i.e.:
∑=
=++=N
nnN21 QQQQQ
1
2max,
2max,
2max,
2max,max K
13.2.2 Combinação de respostas modais
FEUP - 2010

António Arêde 121
Alternativamente, quando as frequências dos modos não estã o bemafastadas pode ser usado o Método da Combinação Quadrática C ompleta,(CQC) válido para qualquer relação de frequências.
Para a quantidade genérica Q cujos valores máximos nos modos n eeee m, são
Qn,max e Qm,max , respectivamente, o valor máximo final vem então dado por
Este método é aplicável sempre que as frequências próprias d os modos devibração que contribuem de forma significativa para a respo sta estiverembem separadas (i.e., se a relação entre duas quaisquer frequ ências estiverfora do intervalo 0.67 a 1.5).
Caso não seja aplicável aquele método, deve-se adicionar as respostasmodais correspondentes às frequências que não estão bem sep aradas, e oresultado ser sobreposto quadraticamente às restantes com ponentes modaispara depois se obter o valor máximo de novo pela raiz quadrada .
Se, por exemplo f2 e f3 não estão bem separadas, virá então para a
componente j dos deslocamentos:
maxmax1 1
max,max,max QQQQQ TN
n
N
mmnmn ρρ == ∑∑
= =
onde Qmax é o vector de todos os valores máximos modais Qn,max e em que o
coeficiente de correlação ρnm (termo genérico da matriz de correlação ρ ), no
caso geral de amortecimentos diferentes ξn e ξm nos modos n eeee m, é dado por
( )( ) ( ) ( ) m
nnm
mnnmnmmnmnnm
nmmnmnmnnm w
wr
rrrr
rr=
++++−
+= ;
4141
8222222
23
ξξξξξξξξ
ρ
( ) 2max,
2max,4
2max,3max,
2max,max, jNjjj2j1j uuuuuu K++++=
e o mesmo para a quantidade genérica Q cujo valor máximo final Qmax:
( ) 2max,
2max,4
2max,3max,
2max,max N21 QQQQQQ K++++=
Quando se considera igual ξ em todos os modos o termo ρnm vem então:
( )( ) ( ) mn
nmnmnm
nmnmnm
rrr
rr ρξ
ξρ =++−
+=2222
232
141
18
FEUP - 2010

António Arêde 122
EXEMPLO: Continuação do problema do capítulo anterior
e) Determinação das massas generalizadas
f) Determinação dos factores modais de excitação sísmi ca
g) Valores do espectro de resposta (seg. RSA)
Seja ξ = 5% ; Terreno tipo 2 ; Acção Sísmica tipo I; Zona Sísmica D
{ } 57.22618.0
1
33.160
033.16618.01
111 =
=φφ= MM T
{ } 57.221
618.0
33.160
033.161618.0
222 =
−
−=φφ= MM T
{ } { } 42.261
1
33.160
033.16618.011
11 =
=φ= ML T
{ } { } 24.61
1
33.160
033.161618.01
22 =
−=φ= ML T
22
21
/4000.7
/3107.2
2
1
scmSHzf
scmSHzf
a
a
=→=
=→=
h) Coordenadas modais
my 00388.03.0757.16
1.3
57.22
42.2621 =××=
my 00017.03.086.43
0.4
57.22
24.622 =××=
coef. de sismicidade da zona (0.3)
FEUP - 2010

António Arêde 123
i) Deslocamentos modais
=φ=00240.0
00388.0111 yu
1º Modo 2º Modo
−
=φ=00017.0
000106.0222 yu
i) Deslocamentos modais
j) Deslocamentos máximos
mu 00388.0000106.000388.0 22max1 =+=
mu 00241.000017.00024.0 22max2 =+=
l) Forças modais por andar
kNuKfs
=
−−
==04.11
78.17
00241.0
00388.0
2400012000
12000120001
1
kN
SM
LM
w
S
M
LwMywMf
aS
aa
s
=×××
=
φ=φ=φ=
99.10
78.173.01.3
57.22
42.26
618.0
1
33.160
033.16
1
111
112
11
11
2111
21
43421
ou, recorrendo às forças de inércia
Operando de forma análoga para o 2º modo, vem kNfs
−
=4.5
336.32
kNR 89.28064.282.28 22max =+=Corte Basal Máximo:
1º MODO 2º MODO
FEUP - 2010

António Arêde 124
13.3.1 Decomposição modal da solicitação
13.3 FACTORES DE CONTRIBUIÇÃO MODAL
é um padrão de forças (invariável no tempo)
O vector de forças é um vector do tipogeffuMtp &&1)( −= )()( tfstp =
s
)()( tutf g&&= é a variação no tempo das forças efectivas
Tal como se fez para os deslocamentos decompostos em numa sér ie devectores expressos na base dos modos de vibração através de:
)(tu
∑∑==
==N
nnn
N
nn tytutu
11
)()()( φ
Também se pode decompor as forças p(t), ou melhor, a distribuição s, em
termos das distribuições de forças de inércia de cada modo.
Para cada modo, já se viu que as forças de inércia são proporci onais a Mφn
,portanto o que se pretende é então escrever:
∑∑==
==N
mmm
N
mm Mss
11
φα
onde os coeficientes de proporcionalidade α se obtêm multiplicando a
expressão acima por φn e aplicando a propriedade da ortogonalidade.
Resulta então:
n
T
n
n
T
n
nn
T
n
nnnM
MsM
M
sMs
φφφφ
φφ
φα ===
m
T
nnn
T
nn
N
mm
T
nmT
n M
sMMs
φαφφαφφαφ =⇒==∑
=1
e assim, a componente (projecção) sn do vector de forças s no modo n (i.e.,
com o mesmo padrão de distribuição das forças de inércia do mo do n), vem
dado por:
expressão que é independente da forma de normalização dos mo dos (porque
qualquer factor de escala que afecte o modo φn cancela-se entre o numerador
e o denominador), o mesmo já não acontecendo com o factor αn ....
onde
e
FEUP - 2010

António Arêde 125
nn
T
nn M
MΓ==
1φα
Particularizando agora o vector de forças s para o caso da acção sísmica (e
abstraindo do sinal - ), então o factor αn vem dado por:
o que significa que a componente modal do vector das forças ef ectivas seobtém por:
= factor de participação modal
)()(,
tuMtpMs gnneffnnnn &&φφ ΓΓ =⇒=
gnnnnnn uywywyn
&&&&& ΓΓΓΓ=++ 22ξ
tal que ∑∑==
==N
ngnn
N
neffneff
tuMtptp11
,)()()( &&φΓ
Também já se viu que a equação de equilíbrio desligada no modo n é:
pelo que, se for d(t) a resposta de um oscilador de 1 g.l. com frequência
w=wn e amortecimento ξ= ξ n, quando solicitado por na base, a sua
equação de equilíbrio dinâmico é dada por:)(tug&&
)()()()()(2)( 2 tdtytutdwtdwtd nng Γ=⇒=++ &&&&& ξ
Note-se a semelhança com o que se fez com os deslocamentos em q uetambém:
∑=
=⇒=N
nnnn tututytu
1
)()()()( φ
e portanto a resposta modal em deslocamentos no modo n escrev e-se:
)()()(2
taw
tdtun
n
n
nnn φφ ΓΓ ==
em que )()( 2 tdwta n= é a pseudo-aceleração.
As correspondentes forças estáticas equivalentes no modo n são dadas por:
)()()()()()( 22 tastdwMtdMwtdKtuKtf nnnnnnnnnnn===== φφφ ΓΓΓ
FEUP - 2010

António Arêde 126
Se a análise for feita em termos com recurso a espectros de res posta, resultaentão (conforme já obtido) a seguinte resposta máxima no mod o n:
e as correspondentes forças estáticas equivalente máximas são
( )nndnnn wSu ξφ ,max, Γ=
( ) ( )nnannndnnnnwSswSwMf ξξφ ,,2
max,==Γ
Para os casos em que seja legítimo a aproximação de massas concentradasnos nós (ou em correspondência com os g.l considerados) de mo do a obteruma matriz de massa diagonal , mas com particular interesse para asestruturas porticadas em que a massa está concentrada nos pi sos, adecomposição modal apresentada é particularmente útil.
No caso dos pórticos planos analisados apenas com 1 g.l. por p iso (paraacção sísmica horizontal) as distribuições modais de forças estáticas
equivalentes (proporcionais a sn ) e dos deslocamentos de piso permite obter
directamente parâmetros de resposta modais importantes.
Nestes casos (pórticos planos) tem-se: hnnn
hX LLLe
X=≡=≡ 111
E de acordo com a figura seguinte (adaptada de Fig.13.2.2, Ch opra)
é possível definir os seguintes valores modais estáticos eq uivalentes:
FEUP - 2010

António Arêde 127
Corte basal ( Vb)
Momento derrubador na base ( Mb)
hnnn
Tnn
TN
jnj
stnb LMssV ΓΓ ====∑
=
φ111
,,
θnnn
TN
jnjj
stnb LshshM Γ===∑
=1,,
em que: { } hMLehh T
nnNjj φθ === ,,1K
���� factor modal de excitaçãosísmica para momentosderrubadores
Corte sob o piso i (Vi)
Momento derrubador sob o piso i (Mi)
∑=
=N
ijnj
stni sV ,,
( )∑=
−=N
ijnjij
stni shhM ,,
Deslocamento de piso i (ui) nin
nstni w
u ,2, φΓ=
Deslocamento relativo entre pisos i (∆i) )( 1,,2, −−=∆ ninin
nstni w
φφΓ
Todas estas grandezas são designadas por modais estáticas e quivalentes,de tal forma que multiplicadas pela pseudo-aceleração a(t) no tempo oupelo valor espectral Sa, conduzem ao valor dinâmico pretendido.
De forma idêntica podem ser definidos os deslocamentos está ticos modaisde piso e os correspondentes deslocamentos relativos entre pisos (drift)que constituem uma medida importante da resposta cinemátic a e dospossíveis danos introduzidos na estrutura.
Identicamente devem ser multiplicadas pela pseudo-aceler ação a(t) notempo ou pelo valor espectral Sa, para obter o valor dinâmico pretendido.
FEUP - 2010

António Arêde 128
13.3.2 Massa e altura modais efectivas
O valor estático equivalente do corte basal ( Vn,b) no modo tem um significado
particular
( ) *
2
, nn
hnh
nn
hnh
nnstnb M
M
LL
M
LLV ====Γ
Tem unidades de massa, razão por que se denota por , e designa-s e demassa modal efectiva por ser a massa do sistema que realmente é mobilizadano modo n.
Tem a particularidade de ser independente da normalização a doptada para osmodos, atendendo a que se pode exprimir da forma seguinte ond e qualquerfactor de escala no modo não afecta o resultado:
*nM
n
T
n
T
n
T
nn
M
MMM
φφφφ 11
* =
Além disso, tratando-se de massas concentradas em correspo ndência comcada g.l. j (o piso j neste caso), a soma das massas modais efectivas dá amassa total do sistema, conforme se comprova a seguir.
De facto partindo novamente da expressão: ∑=
Γ==N
nnn MMs
1
1 φ
e atendendo a que, sendo diagonal a a matriz de massa, o produt o M1corresponde a um vector com as massas dos pisos, a pré-multip licação daquela
expressão por 1T resulta na massa total da estrutura. Vem então:
∑∑∑===
====N
n
hnn
N
n
T
nn
N
nn
Tn
Tt LMMMM
111
1111 ΓΓΓ φφ
Ou seja: ∑∑∑===
=⇔=N
nn
N
n t
nN
nnt m
M
MMM
1
*
1
*
1
* 1
onde representa a fracção (relativa, e portanto adimension al) da massa totalque efectivamente se mobiliza no modo n.
*nm
Percebe-se assim a importância da massa modal efectiva (abs oluta ou relativa)de cada modo, que dá uma medida eficaz para determinar o nº de m odos aincluir na análise de forma a garantir que toda a massa (e port anto as forças deinércia mobilizadas) do sistema é incluída a menos de uma tole rância (ex. 5%)
FEUP - 2010

António Arêde 129
Assim, o nº de modos (J) a incluir de forma a que o corte basal venha
traduzido correctamente a menos de e=5%, será o que satisfaz a condição:
hn
nhnn
nn
n
nnnnn
stnbnn L
L
L
L
M
LhLMhM
θθθθ ===⇒==
Γ
ΓΓΓ
**
,**
95.011
* =−≥∑=
emJ
nn
*nM
Tal como a massa modal efectiva, a altura modal efectiva tamb ém éindependente da forma de normalização dos modos, já que se pod e escreverna forma expandida:
1*
M
hM
L
Lh
T
n
T
nhn
nn φ
φθ
==
Na prática, e , correspondem à massa e à altura do oscilador de 1 g.l.
que tem a mesma frequência e amortecimento do modo n e que gera a mesma
resposta modal:
*nM *
nh
*nM
);(
);(**
,
*,
nnannnb
nnannb
wShMM
wSMV
ξ
ξ
=
=
nbM ,
);( nna wS ξ
nbV ,
*nh
Outro conceito interessante relaciona-se com o valor estát ico equivalente domomento derrubador modal na base.
Um vez que representa uma medida da massa (e das forças de inér cia)
envolvidos no modo n, a altura efectiva a que deve ser considerada aquela
massa efectiva é a que originar o mesmo momento derrubador mo dal.
Ou seja:
*nh
*nM
FEUP - 2010

António Arêde 130
13.4 MÉTODO DE RAYLEIGH
Considere-se na análise apenas o 1º modo e admita-se que pode ser obtidopelo seguinte processo:
gmF ii =
Solicitação gravítica na horizontal
=→=
Nd
d
d
dFdK...
2
1
Resulta então em que1
121 M
Kw = dMdMdKdK TT == 11 e
Mas: { } ∑=
==N
iii
N
NT dF
F
F
F
dddFdK1
2
1
211 ......
{ } ∑=
=
⋅=
==N
iii
NN
N
NN
TT dF
dF
dF
dF
ddd
d
d
d
m
m
m
gddMgdMg1
222
11
212
1
2
1
1 ...,,,MMO
( )ξπ
,2
1
1
2
1
1
2
1 wSSdF
dFgf
dF
dFgw aaN
i ii
N
i ii
N
i ii
N
i ii =→=⇒=∑∑
∑∑
=
=
=
=
A aceleração modal máxima vem então
g
dFM
g
dFMdLS
M
Ly
N
i ii
N
i iiTa
∑∑ == ==== 1
2
11
11
1max,1 1 comcom&&
g
w
dF
dFSy N
i ii
N
i iia
T2
1
2
111max,1 ===⇒∑∑
=
=ΓΓΓΓΓΓΓΓ com&&
F1
F2
F3
F4
d
4d
d3
2
d1
Donde:
e:
(Espectro de Resposta)
FEUP - 2010

António Arêde 131
Donde a componente j do vector aceleração devida ao 1º modo vem
E as correspondentes forças de inércia vêm dadas po r:
jja
ja
jTjjj dFw
g
Sdw
g
SmumF 2
22
max,1max,1 === &&
Estas forças (depois de divididas pelo coeficiente de compo rtamento) sãoaplicadas na estrutura para obter a sua resposta aproximada à acçãosísmica, verificando-se que este método conduz a resultado s que comparambem com os obtidos pela análise modal, sobretudo para estrut uras quesejam essencialmente dominadas pelo 1º modo de vibração.
Resolução do problema em estudo pelo método de Rayl eigh
=0266.0
0399.0d
160 kNd1
160 kN
= 0.0399
= 0.02662d
918.2822
==∑∑
∑∑
i
i
ii
ii
d
d
dF
dF 2scm/310Hz7.2918.288.92
1 =→=×= aSfπ
rad/s83.16=w kN68.11
52.17
0266.0
0399.0
8.9
16083.16
8.9
3.01.3 2
=
×××=F
A resposta da estrutura à acção sísmica obtém-se determinando os deslocamentos e esforços devidos a esta acção.
11.68 kN
17.52 kN
jaT
jjajTT
j dg
SwudSdyu
2
max,11max,1max,1 === &&&&&& ouΓΓΓΓ
Trata-se de um método muito prático, facilmente pro gramável numa simples folha de cálculo e que só requer um programa de aná lise estática para obter os deslocamentos na direcção em que são aplicadas a s forças gravíticas.
FEUP - 2010

António Arêde 132
13.5 MÉTODO SIMPLIFICADO DE ANÁLISE ESTÁTICA
Tal como o método de Rayleigh considera-se na análise apenas o 1º modo,mas assumido com uma configuração linear (triangular inver tida) que éuma aproximação aceitável apenas para estruturas regulare s em altura.
Partindo desta hipótese e admitindo que o corte basal, que eq uilibra aresultante de todas as forças de inércia em altura, é imposto como umafracção β do peso total da estrutura, é possível então estabelecer oseguinte raciocínio:
h1
ih
hn
mi
mnnu
n-1u
ui
u
F1
Fi
2F
Fn-1
nF
Vb
⇒= nn
ii u
h
hu &&&&
==
n
niiiii h
uhmumF
&&&&
∑∑∑===
=
==
n
iii
n
nn
i n
nii
n
iib hm
h
u
h
uhmFV
111
&&&&
∑∑==
=⇒n
ii
n
iii
n
n mghmh
u
11
β&& ( )∑
∑
=
==
∴
n
iii
n
ii
n
n
hm
mg
h
u
1
1β&&
declive da deformada
∑
∑
∑
∑
=
=
=
= == n
iii
n
ii
iin
iii
n
ii
iii
hG
GhG
hm
mghmF
1
1
1
1 ββ
∑=
⋅=n
iib mgV
1
β
em que o corte basal Vb se escreve:
Resulta então:
Como se admite que o corte basal é uma fracção do peso total:
Distribuição de forças proporcionais
ao peso Gi do piso e
à respectiva altura hi.
FEUP - 2010

António Arêde 133
14.1.1 MÉTODO PADRÃO
Estrutura Tridimensional, Análise Dinâmica e Não-Li near
Há diversos métodos com diferentes graus de rigor, generali dade e decomplexidade.
Método Simplificadode Análise Estática
Métodos Gerais e“Exactos”
14.1 METODOLOGIAS CONTEMPLADAS
Pouco prático, ficando reservado a estudos mais específico s,estruturas menos correntes, calibração de parâmetros e mét odos
gu&&
uF
u
40%
60%
Redução para 60%
Redução para 40%
Elástico
Fe,máx.
Desde que a estrutura tenha DUCTILIDADE adequada, podem obter-semenores esforços, ou melhor: podem ser adoptadas menores forças sísmicasde dimensionamento.
14. DETERMINAÇÃO DOS EFEITOS DA ACÇÃO SÍSMICA SEGUNDO O RSAEEP
14. DETERMINAÇÃO DOS EFEITOS DA ACÇÃO SÍSMICA SEGUNDO O RSAEEP
FEUP - 2010

António Arêde 134
Metodologia adequada para projecto, correntemente implem entadaem programas de cálculo automático comerciais.
Metodologia também adequada para projecto, mas mais simpli ficadae prática quando não se pretende fazer uma modelação 3D que é d emais difícil interpretação e sistematização para o dimensio namento.
Reservado para estruturas regulares em altura, claramentedominadas pelo 1º modo de vibração..
Muito limitado, fortemente penalizador do dimensionamento e a usarapenas em casos complexos mas cuja análise sísmica não seja u mfactor de grande importância.
Em qualquer dos métodos existem um limites para o efeito da acção dossismos, de modo a garantir resistências adequadas a forças h orizontais.
Vb (θ) – máxima força de reacção horizontal na direcção θ (ex: X ou Y)
P – peso da estrutura; Vb – mínimo de Vb (θ)
αδ 04.0≥=P
Vb
δαα<δ 04.004.0 por resultados rmultiplicaSe
Limite Inferior
α<δ 16.0
αδα>δ 16.016.0 por resultados os se-dividir podeSe
desde que a estrutura apresente uma certa ductilidade.
Limite Superior
As massas a considerar na análise correspondem ao valor médio das cargaspermanentes + valor quase-permanente das cargas variáveis .
As características de rigidez e amortecimento devem corres ponder a valoresmédios das propriedades dos materiais.
14.1.2 Estrutura Tridimensional, Análise Dinâmica , Comportamento Linear e Coeficientes de Comportamento
14.1.3 Estruturas Planas, Análise Dinâmica, Comporta mento Linear, Coeficientes de Comportamento e Correcção de Efeito s de Torção
14.1.4 Método Simplificado de Análise Estática
14.1.5 Método de Recurso 0.22α Fi
14.2 ASPECTOS GERAIS COMUNS
FEUP - 2010

António Arêde 135
i) A distribuição de massa e de rigidez em planta deve ser propor cionada
Condições de Aplicação
Cg
RC
< 0,15a
a
< 0,15b b
ii) Distribuição vertical de massa e de rigidez sem grandes vari ações
Centro de Rigidez de um piso (C r)Ponto no qual a aplicação de umaforça horizontal, origina apenastranslação na direcção da força(não provoca rotação).
iii) Malha ortogonal e pouco deformável
pisos de nº ou )(8
5.0 =>> nHzn
fHzf %5.11,
1 <−
−
−
ii
ii
h
dd
iv) Pisos indeformáveis no seu plano (para boa repartição da acç ão peloselementos resistentes verticais – pórticos e7ou paredes)
A acção do sismo é quantificada através do corte basal impost o:
ηβα=β 0
Coeficiente Sísmico
Coeficiente Sísmico de Referência
Coeficiente de Comportamento
F xI~
yR
~ I yF
xR
RC
1 2 3 4 5 6 7 f(Hz)
0.04 α < β < 0.16 α
A S1
S2A
β0
200
400
β0a
S ,ξ = 5 %
A distância entre os centros de rigidez e demassa (onde actuam as forças de inércia),deve ser limitada a 15% da dimensão dodesenvolvimento da estrutura.
Espectro Envolvente
PVb β=
14.3 ASPECTOS PARTICULARES do Método Simplificado de Análise Estática
FEUP - 2010

António Arêde 136
Valores e Distribuição das Forças Estáticas
Estimativa (grosseira) da Frequência:
Hzh
bf
Hzn
f
nHzn
f
6
16
)(12
=
=
==
Parede Tipo Estrutura
Parede-Pórtico Tipo Estrutura
pisos de nº Pórtico Tipo Estrutura
∑
∑
=
== n
jjj
n
jj
iik
Ph
P
PhFi
1
1β
Estas forças são aplicadas, em cada piso i, com as seguintes excentricidadesrelativas ao centro de massa:
Quando há simetria e distribuição uniforme de rigidez em pla nta pode afectar-seos resultados do seguinte factor de correcção dos efeitos de torção
a
x6.01+=ξ
ae
abe
i
ii
05.0
05.05.0
2
1
=
+=
a
b i
CRie2i 1ie
Cgi
iF
onde x é a distância do elemento em estudo ao centro de massa (ou de ri gidez,
uma vez que ambos coincidem).
As forças F ki nos pisos devem ser consideradas todas com as excentricidad es e1i
ou todas com e 2i, conforme o que for mais gravoso para o elemento em estudo.
� Proporcionais ao peso Pi de cada piso
� Proporcionais à altura hi de cada piso
FEUP - 2010

António Arêde 137
Significado das Excentricidades Adicionais das forças sís micas (RSA)
0.05 a – Parcela que se destina a atender à componente da rotação do sismo(ou melhor à diferente intensidade com que actua nos diverso selementos verticais da base do edifício ao longo da direcção normalà da acção sísmica), e ainda ao facto de, havendo comportamentonão linear , se gerarem assimetrias de rigidez porque um dos ladospode entrar primeiro em regime não-linear do que o seu simétr ico,ficando portanto com menor rigidez.
No caso de haver simetria estrutural e de massa, Cr = Cg , asexcentricidades coincidem em valor (mas não em sentido, pel o quehá que considerar ambos)
aeabe iii 05.0//05.05.0 21 =+=
2ie 1iegicric
ib
O factor de correcção para efeitos de torção em estruturas si métricas comrigidez uniformemente distribuída ( ξ = 1+0.6 x/a) pode ser deduzido a partir dacondição de que |e 1i| = |e2i| = 0.05a e da distribuição uniforme de rigidez (ouseja, da distribuição uniforme de forças resistentes ao nív el do piso).
0.5 bi – Parcela para atender à incerteza na determinação da posiçã o docentro de rigidez devido à natureza dinâmica do problema que n arealidade inclui diferentes modos na resposta, aos quais es tãoassociadas forças distintas, tornando muito difícil (porv enturaimpossível mesmo) de nos casos correntes definir uma posiçã oúnica do centro de rigidez.
No método simplificado estático e no de Rayleigh isto é possí velporque só há uma distribuição de forças assumida, mas a incer tezana posição “real” do centro de rigidez permanece, razão pela q ualnestes dois métodos que envolvam apenas análise plana (sem u mmodelo 3D da estrutura onde a distribuição de rigidez e massa jáentra automaticamente) se torna necessário esta “margem desegurança” na posição do centro de rigidez.
FEUP - 2010

António Arêde 138
14.4 EXEMPLO DE APLICAÇÃO DO MÉTODO DE RAYLEIGH E DO MÉTODO SIMPLIFICADO DE ANÁLISE ESTÁTICA
Dimensões:
Coeficientes de comportamento:
Terreno tipo I
Local: Porto ( α = 0.3)
Vigas: b = 0,2m; h = 0,5m
Pilares: b = 0,35m; h = 0,35m
(até ao 3º piso)
b = 0,25m; h = 0,25m
(restantes pisos)
E = 21.0 GPa
Cargas
G = 5,5 kN/m 2 ; Q = 2,0 kN/m 2
Peso próprio de vigas e pilares:
1.0 kN/m 2
Cargas permanentes por piso:
(8x15,0)x(5,5+1,0) = 780 kN
Sobrecargas por piso:
8,0 x 15,0 x 2,0 = 240 kN
Gi = 780 + ψ2 x 240 =
= 780 + 0,2 x 240 = 828 kN
5.0m5.0m5.0m
4.0
m4
.0m
3.0
m3
.0m
3.0
m3
.0m
4.0
m
Esforços: η = 2,5
Deslocamentos: η = 1,0
Estrutura Porticada Simples – Análise Sísmica na maior dire cção (simétrica)
FEUP - 2010

António Arêde 139
Na zona D, em geral, a maior força sísmica não ultrapassa 10% da scargas gravíticas.
7.92
24.24
12.74
16.34
21.56
Máximo deslocamento horizontal = 0.71 x 2.5 = 1.775 cm
Momento nos pilares extremos = 44.46 kN.m
Momento nos pilares interiores = 49.77 kN.m
Soma das reacções horizontais = 82.8 kN
24.24 / 828 = 0.03 ; 21.56 / 828 = 0.026 ; 16.34 / 828 = 0.020
12.74 / 828 = 0.015 ; 7.92 / 828 = 0.010
RAZÃO ENTRE AS CARGAS GRAVÍTICAS E ACÇÕES HORIZONTAIS
Hz04.164.422
1
2
12
===∑∑
ππ ii
ii
dF
dFgf
14.4.1 Análise Dinâmica (Método de Rayleigh)
2m/s48.1=ISa 2m/s84.1=IISa
098.02
2
=ηg
wSa
828
828
828
828
828828
828
828
828
828
.0975
.1569
.2013
.2987
.2656
80.74
129.92
166.7
219.9
243.3
844.6 194.1
7.88
20.38
33.56
58.4
73.88
7.92
12.74
16.34
21.56
24.24
iia dFg
wS
η2
2
ii dF 2ii dFiF id
22 m/s55.03.0m/s84.1 =×=α×= IIa SaS
0.71 cm
49.7744.46
αα 16.0)5*828/(8.8204.0 <<Verificação de corte basal mínimo e máximo:
FEUP - 2010

António Arêde 140
Hz4.25
1212 ===n
f
14.4.2 Análise Estática (método simplificado)
14.4.2.1 Usando a estimativa do R.S.A. para a frequência
26.017.00 == fβ 031.05.2
3.026.00 =×==
ηαββ
048.016.0031.0012.004.0 =<<= αα
( )( ) ii
ii
iiiki hh
Gh
GGhF 567.2
16131074
11111828031.0 =
++++++++==
∑∑β
Máximo deslocamento horizontal = 1.14 x 2.5 = 2.85 cm (+ 61%)
Momento nos pilares extremos = 68.96 kN.m (+ 55%)
Momento nos pilares interiores = 77.27 kN.m (+ 55%)
Soma das reacções horizontais = 128.35 kN (+55%)
COMPARAÇÃO COM A ANÁLISE DINÂMICA (método de Rayleigh)
14.4.2.2 Usando a frequência calculada pelo método de Raylei gh
Máximo deslocamento horizontal: 2.85 x (.173/.26) = 285 x .67 = 1.9cm (+ 7.0%)
Momento nos pilares extremos = 68.96 x .67 = 45.88 kN.m (+ 3.0% )
Momento nos pilares interiores = 77.27 x .67 = 51.4 kN.m (+ 3.3 %)
Soma das reacções horizontais = 128.35 x .67 = 85.4 kN (+3.1%)
10.268
17.969
25.67
33.371
41.072
1.14 cm
77.2768.96
173.004.117.00 ==β
FEUP - 2010

António Arêde 141
Vigas e pilares ���� Elementos de barra com 6 g.l. por nó
Lajes e paredes ���� Elementos finitos de laje e casca
• Modelo Espacial (3D) da Estrutura (Método “exacto” – p adrão)
• Elevado nº de g.l. e dificuldade de analisar e sistematizar re sultados
SIM
PLI
FIC
AÇ
ÃO
Associação de sub-estruturas planas de contraventamento ( pórticose/ou paredes) em qualquer direcção
Compatibilização pelo piso rígido, segundo 3 deslocamentoshorizontais (X, Y e rotação)
• Modelo de 3 g.l. por piso
• Nº razoável (baixo) de g.l. (3 x Nº de pisos)
• Consideração de comportamento 3D
• Análise e sistematização de resultados mais fácil (por pórti co)
Associação de sub-estruturas planas de contraventamento ( pórticose/ou paredes) numa só direcção
Compatibilização pelo piso rígido, apenas segundo um desloc amentohorizontal por piso nessa direcção
• Associação plana (estrutura comboio)
• Facilidade de utilização com um programa de pórticos planos
• Consideração de comportamento numa só direcção
• Facilidade de análise e sistematização de resultados (por pó rtico)
15.1 MODELOS DE ANÁLISE
15. ANÁLISE DE ESTRUTURAS DE EDIFÍCIOS SOB ACÇÕES HORIZONTAIS
15. ANÁLISE DE ESTRUTURAS DE EDIFÍCIOS SOB ACÇÕES HORIZONTAIS
FEUP - 2010

António Arêde 142
15.2 ESTRUTURAS PLANAS RESISTENTES A ACÇÕES HORIZONTAIS:
PÓRTICOS, PAREDES E MISTAS
15.2.1 Estrutura tipo PÓRTICO
• Em cada piso i o deslocamento entre pisos ∆i depende essencialmente da
força de corte sob esse piso, uma vez que as rotações dos nós sã oparcialmente restringidas pelas vigas. Se estas forem de gr ande rigidez de
flexão (“infinita”, por comparação com a dos pilares), então o drift ∆i
depende mesmo exclusivamente da força de corte Vi sob o piso, sendo
dado pelo quociente dessa força pela rigidez de corte do piso .
• Como a força de corte aumenta de cima para baixo (por acumulaç ão das
forças de piso), também o drift ∆i aumenta de cima para baixo. Sendo o
deslocamento de cada piso a acumulação dos drifts desde a base até aotopo, a curvatura típica da deformada média de um pórtico ten de a reduzirem altura, apresentando o aspecto ilustrado na Figura.
Figuras adaptadas de “Sismos e Edifícios”, ed. Orion, Cap.6
15.2.2 Estrutura tipo PAREDE
• Em cada piso i o drift ∆i depende não só da
flexão entre pisos, mas também dasrotações da parede ao nível inferior.
• Como as rotações estão sempre a
aumentar em altura, então o drift ∆i tem
uma taxa de crescimento em altura semprepositiva, donde a deformada final típica deconsola tem sempre o sentido da carga.
FEUP - 2010

António Arêde 143
15.2.3 Estrutura MISTA tipo PÓRTICO-PAREDE
• Se a parede e o pórtico estivessem separados e sujeitos a uma i dênticadistribuição de forças em altura as configurações deformad as seriam bemdiferentes conforme indicado na figura a).
• As lajes de cada piso i, se forem rígidas, impõem igual deslocamento depiso na parede e no pórtico, gerando forças de interacção ent re ambos.
• Nos pisos inferiores, os deslocamentos da parede seriam men ores do queos do pórtico se fossem independentes; como tal a parede tend e a travaro pórtico (“puxando-o”) e este a forçar mais a parede (“empurran do-a”);nos pisos superiores dá-se o contrário, originado o diagram a de forças deinteracção indicado em b).
• A distribuição final de forças (c) altera-se; em particular no pórtico, emque as forças finais mudam sempre de sentido, os esforços de c orte nospilares já não serão máximos na base mas algures acima.
Figuras adaptadas de “Sismos e Edifícios”, ed. Orion, Cap.6
FEUP - 2010

António Arêde 144
F3
iFV i
2F
1F
3FV3 =
V2 = F3+ 2F
2+ F1 3F=V F1+
SOB O PISO
ALÇADO
PLANTA
NO PISO
1
2
+
NO PISO SOB O PISO
f 3
=3V
p
pf
pf
p pf 3
3f ppV =2
pf 2
2f p1 =Vp pf 3 + + pf 1
0xF xTii
ALÇADO
SOB O PISONO PISO
bV bVp
15.3 ANÁLISE PLANA DE ESTRUTURAS PÓRTICO-PAREDE SOB ACÇÕES ESTÁTICAS HORIZONTAIS
15.3.1 Notação de forças globais e locais
= força de corte sob o piso i (ou na base), no pórtico p,devido apenas ao movimento de translação.
piI
GLOBAL (Estrutura) LOCAL (Pórtico p)
Piso i
= força de corte sob o piso i (ou na base, i=0), no pórtico p,devido aos movimentos de translação e rotação.
piV
∑=
=N
il
pl
pi fV∑
=
=N
illi FV
i
F
N
ill
V V
xFx
l
i
∑==
pN
pN
Nip
ip
ip
i
Vf
VVf
=
−= −=+ 1,,11 ; K
= forças de corte sob o piso i (ou na base), no grupo de Npt
pórticos iguais de tipo pt, devido apenas ao movimento detranslação (igual ao somatório das forças nos pórticos pt).
ptiR
piI
FEUP - 2010

António Arêde 145
F5
3F
1F
4xPT1 2xPT2
• Associação em comboio (ligação de pórticos/paredes por bie las rígidas)
• Distribuição de forças e esforços proporcional à rigidez do s pórticos
• Não há torção global
• Pisos rígidos no próprio plano
Deslocamentos horizontais iguaisnos pórticos e nas paredes,obrigando à compatibilização dedeformadas de diferentes tipos
• Modelação
4 pórticos “simples” tipo PT1 (1,2,5,6)
2 pórticos “mistos” tipo PT2 (3,4)
BIELAS AXIALMENTE
RÍGIDAS
EA ≅≅≅≅ ∞∞∞∞
EI ≅≅≅≅ 0
Exemplo:EA = 1000 EAvig
EI = EIvig / 1000
Cuidados particulares :
A deformabilidade axial das vigas pode introduzir erros, pelo que, para os evitar deve-se artificialmente incrementá-la , condicionando as dimensões das secções.
A modelação da parede com um elemento de barra (com dimensões de iguais à da secção transversal da parede) deve ser complemen tada com troços rígidosnas extremidades das vigas adjacentes
15.3.2 Estruturas simétricas com solicitação simétrica
F
1
2
3
4
5
6
PLANTA
CORTEPISOS
5
4
3
2
1
0
FEUP - 2010

António Arêde 146
pN
pN
pN
Nip
ip
ip
ip
ip
i
IVf
IIVVf
==
−=−= −=++ 1,,111 ; K
• Para cada pórtico p, as forças de corte sob o piso i, obtêm-se dosanteriores dividindo pelo número de pórticos do grupo em que aquele seinsere.
piI
• Para cada pórtico p, as forças no piso obtêm-se das anteriores porequilíbrio, subtraindo as forças de corte de entre-pisos su cessivos, i.e.:
pif
Claro que também pode ser feito logo ao nível das forças (e ) edepois dividido pelo número de pórticos do grupo ( Npt):
ptiR pt
iR 1+
==→
====→
2/2PT
4/1PT
243
16521
iii
iiiii
RII
RIIII
• Como só há translação, as forças de corte finais do pórtico co incidemcom as de corte só devidas á translação .
piV
piI
i
pip
i V
Ir =
pt
ptNp
NNi
pt
pti
ptip
i N
Rf
N
RRf =−= −=
+;1,,1
1 ; K
fornece uma medida da rigidez relativa entre pórticos que po de ser usadapara repartir as forças de corte sob aquele piso.
• Por serem obtidos por imposição de igual deslocamento (de pi so erelativo entre pisos) nos vários pórticos, essas forças dão uma medida darigidez de corte de cada pórtico p sob o piso i.
• Assim, o quociente de cada uma dessas forças para a força de co rte totalsob o piso i , dado por:)( iV
F1
F3
F5
4F
2F
R11
2R1
1R3
1R4
1R5
RT1
2
3
4
5R2
R2
R2
2R
1R2
T2R
• A modelação adoptada permite obter directamente as forças d e corte ,para cada grupo de pórticos pt sob o piso i, através da soma dos esforçostransversos dos correspondentes pilares/paredes que supo rtam esse piso.
ptiR
FEUP - 2010

António Arêde 147
• Associação em comboio (ligação de pórticos/paredes por bie las rígidas)
• Distribuição de forças e esforços proporcional à rigidez do s pórticos
• Correcção de efeitos devido à torção global resultante da ex centricidadeentre a força actuante (por piso) e o centro de rigidez (no eix o de simetria)
• Modelação (“em comboio”)
i) Só translação ( e = 0)
a) obtenção de esforços de corteentre pisos e na base, para cadagrupo de pórticos tipo:
b) Repartição pelos pórticos de cada grupo
=
=⇒
basalcorte
pisodoabaixocorte1PT
1
1
T
i
R
iR
=
=⇒
basalcorte
pisoosobcorte2PT
2
2
T
i
R
iR
==→
====→
2/2PT
4/1PT
243
16521
iii
iiiii
RII
RIIII
15.3.3 Estruturas simétricas com solicitação qualquer (simétrica ou não)
4
5
6
F
PLANTA
1
2
3
CR
eF
CORTEPISOS
5
4
3
2
1
0
F5
3F
1F
4xPT1 2xPT2
4 pórticos “simples” tipo PT1 (1,2,5,6)
2 pórticos “mistos” tipo PT2 (3,4)
• Cálculo de rigidez relativa
FEUP - 2010

António Arêde 148
ii) Correcção com efeito da torção (F.e)
• A figura reporta-se ao piso genérico i (ou à base i=0), pelo que seconsidera a seguinte notação simplificada:
pi
ppi
ppi
p
iiVVi
IIIIdd
uueeVVi
∆=∆==
====
;;
;;; θθ
• A excentricidade refere-se ao centro de rigidez do piso CRi
• As forças obtidas para cada pórtico p abaixo do piso i (devidas só àtranslação) dão uma medida da rigidez desse pórtico ao nível desse piso(porque foram obtidos por imposição de iguais deslocamento s de piso),que totalizam a força de corte global Vi sob o mesmo piso.
• Podem assim ser usadas como “rigidez” para quantificar o efeit o darotação!!
piI
onde
1==⇒= ∑∑∑p
p
p
p
p
p rV
IIV
4
6
5
RC
3
2
1
4I
5I
3
2
1I
I
I
6I 6
5
∆I1
2
3
4
∆I
∆I
∆I
∆I
∆I
5
1d
d6
d2
d4
3d
V d
e
CRu
θ
Pd
θ
Pδ =u+ θ dP
Pk ~ PI
u = TRANSLACÇÃO ROTAÇÃO = θ
V
FEUP - 2010

António Arêde 149
Só devido à rotação (θ) provocada pelo momento ( V.e), i.e. para translaçãonula ( u = 0), vem, em cada pórtico p:
( ) ppppppp dIdIKI ⋅⋅=⋅=⋅=∆ θαθαδ
pp IK ~pp dθδ += 0
pp IK α=⇔
Por equilíbrio tem-se:
( )
( )∑
∑ ∑
⋅=
=⋅=⋅∆=⋅
p
pp
p p
ppppV
dI
dIdIeV
2
2
θα
θα
2p
p
p
V
dI
eV
⋅⋅=∴
∑θα
donde:pp
p
pp
Vp dIdI
eVI ⋅⋅
⋅⋅=∆
∑2
A força de corte total em cada pórtico vem então
pp
p
pp
Vpppp dIdI
eVIIIV ⋅⋅⋅+=∆+=
∑2
pp
p
pp
pVpp
p
pp
p
pV
pp Idr
deId
dI
Ie
IV ξ⋅=
⋅+⋅=
⋅
⋅+⋅=⇔
∑∑
∑22 11
ou seja, atendendo a que ∑=p
pIV
onde
∑∑
∑⋅+=
⋅
+=
p
pp
pV
p
pp
p
ppV
p
dr
de
dI
Ide
22 11ξ
representa o factor de correcção devida aos efeitos de torçã o, que permiteobter a força de corte final sob um dado piso i do pórtico p a partir da forçade corte devida só à translação .
As forças por piso obtêm-se como anteriormente, por diferença das de corte .
FEUP - 2010

António Arêde 150
• Associação em comboio (ligação de pórticos/paredes por bie las rígidas)
• Distribuição de forças e esforços proporcional à rigidez do s pórticos
• Determinação da posição do centro de rigidez por piso
• Correcção de efeitos devido à torção global resultante da ex centricidadeentre a força actuante (por piso) e o centro de rigidez
3 pórticos tipo PT1 (1,4,5)
2 pórticos tipo PT2 (2,3)
Obtenção de esforços de corte entrepisos e na base, nos pórticos tipo erepartição pelos pórticos de cadagrupo como no caso das estruturassimétricas
==→===→
2/
3/232
1541
iii
iiii
RIIPT2
RIIIPT1
15.3.4 Estruturas não-simétricas com solicitação qualquer (simétrica ou não)
• Modelação (“em comboio”)
i) Só translação ( e = 0)
3
0
1
2
3
4
5
PISOS
F
x
4
5
CORTE
0
1
2
PT1
F
PT2
PT2
PT1
PT1
x+
5F
4F
3F
2F
1F
3xPT1
R1T
2xPT2TR2
• Cálculo de rigidez relativa
FEUP - 2010

António Arêde 151
ii) Obtenção da posição do centro de rigidez de cada piso i
• Com base nas forças que são uma medida da rigidez do pórtico p
sob o piso i.
• O centro de rigidez encontra-se na linha de acção da resultan tedessas forças.
RCpp xxd −=
piI
iii) Correcção com efeito de torção
Redefinição prévia de coordenadas, agora em relação ao cent ro derigidez (CR):
• De cada pórtico
• Dos pontos de aplicação das forçastotais de piso ( F) e de corte ( V): RCFF xxe −=
Aplicação directa da expressão já atrás obtida:
⋅
⋅+×=∑
∑p
p
pp
p
pT
pp ddI
Ie
IV 21
p/ piso
força de corte sob o piso i ou na base
(excentricidades eF e eV)
∑∑ ⋅=⋅p
pp
p
pC xIIx
R
∑∑
∑⋅=
⋅=
p
pp
p
p
p
pp
C xrI
xI
xR
e obtenção das forças de piso por subtracção das de corte.pif
RCVV xxe −=
4(+)d
PT15
PT1
PT2
PT2
PT1
0
2
1
3
RC
+x
p
x5
x4
x3
1x
2x
Cx
I 5
4I
I 3
I 2
I 1
R
FEUP - 2010

António Arêde 152
Baseada no Método de Rayleigh ouno Método Simplificado de Análise Estática (Forças E státicas Equivalentes)
i) Modelação “em comboio” e cálculo para a totalidade das cargasgravíticas Gi em cada piso. Obtém-se os deslocamentos de piso di.
ii) Cálculo da frequência e das acelerações espectrais regulam entares
),(max2
12 III aaaii
ii SSSdG
dGgf =→=∑∑
π ... ASR
iii) Determinação das forças sísmicasii
ai dG
g
wSF
η22
=
iv) Cálculo da associação de pórticos para as forças sísmicas Fi :
- os esforços obtidos são os devidos à acção sísmica e
- os deslocamentos devem ser multiplicados por η.
v) Os esforços e deslocamentos finais obtêm-se multiplicandoos anteriores pelo factor correctivo de torção:
Este coeficiente é válido se a rigidez for uniformementedistribuída em planta, caso em que se pode considerar:
a
x6.01+=ξ
15.4 ANÁLISE SÍSMICA PLANA DE ESTRUTURAS PÓRTICO, P AREDE ou MISTAS
15.4.1 Estruturas simétricas (em termos de rigidez e massa)
1)(1
.)().(
2/
2/=⋅=→=
==→=
∫∑ −ardxxrr
constrxrcomdxxrT
Ir
a
ap
p
pp
aee FT 05.0=≡
a
x
dxxr
xa
dr
dea
ap
pp
pTp 6.01
05.011 2/
2/
22 +=⋅
⋅+→⋅+=∴∫∑
−
ξ
xd p →
FEUP - 2010

António Arêde 153
i) Modelação “em comboio” e cálculo para a totalidade das cargasgravíticas Gi em cada piso. Obtém-se os deslocamentos de piso di.
ii) Cálculo da frequência (estando-se aqui a desprezar o efeito de torção nadeterminação da frequência) e da aceleração espectral regu lamentar Sa .
iii) Determinação das forças sísmicas globais Fi
iv) Cálculo da associação de pórticos para as forças sísmicas gl obais Fi
1ª Fase: Como nas estruturas simétricas – só transla ção
2ª Fase: Correcção com o efeito de torção
v) Cálculo da rigidez relativa dos pórticos e do centro de rigidez , combase nos resultados da análise para as forças sísmicas globa is Fi
vi) Correcção da excentricidade relativa ao centro de rigidez c om asexcentricidades definidas no Art.º 32.2 do RSA
ae
abe
i
ii
05.0
05.05.0
2
1
=+=
a
bi
CRie2i 1ie
Cgi
iF
iCRG bxdii
=−=
pi
p
pi
pi
Vi
pi
p
pi
pi
p
piVi
pi
ddr
e
ddI
Ie
∑
∑
∑
+=
⋅+=
2
2
.1
.1ξ
15.4.2 Estruturas não-simétricas (em termos de rigidez e/ou massa)
v) Agravamentos das forças de corte nos pórticospelo factor , sendo a excentricidade eVi calculadapara eF1i ou eF2i conforme o que for mais gravosopara o elemento considerado, mas considerando
em todos os pisos simultaneamente.
iGiFiGiF edeedeii 2211 −=+= ou
ii ee 21 ou
piξ
vi) Obtenção das forças por piso a partir da diferença das forças de corte
FEUP - 2010

António Arêde 154
• Matriz de rigidez
15.5.1 ANÁLISE ESTÁTICA.
DESLOCAMENTOS, FORÇAS E EQUAÇÕES DE EQUILÍBRIO
−−−− Deslocamento do andar i na direcção xiu
−−−− Deslocamento do andar i na direcção yiv
−−−− Rotação do andar iiθ
[ ]NNNT vuvuvua θθθ ...222111=
[ ]NyNxNyxyxT MFFMFFMFFF θθθ ...222111=
K ( )NN 33 ×
FaK =
vi
ui
iθ
yz
x
RIGIDEZ INFINITA NO PLANO
3 graus de liberdade / piso
15.5 ANÁLISE TRIDIMENSIONAL DE EDIFÍCIOS
- MODELO DE 3 GRAUS DE LIBERDADE POR PISO
sendo N o nº de andares
FEUP - 2010

António Arêde 155
A matriz de rigidez da estrutura global é devida:
- aos pórticos e paredes que só têm rigidez no seu pl ano e
- às caixas de escadas e de elevadores, que têm rigi dez nas 2 direcções horizontais e rigidez à torção
i) Contribuição da rigidez dos pórticos e paredes nos seus plan os
−−−− Pela via Directa
(impondo deslocamentos unitários num dos andares e zero nos outros)
−−−− Através da matriz de flexibilidade
(impondo forças unitárias sucessivamente em cada andar)
ppp fdK =
A matriz de rigidez do pórtico pode ser obtida:
pK
pp
if αcos força na direcção x
força na direcção y
momento em relação a 0
15.5.1.1 Matriz de Rigidez e Vector Solicitação Glo bal
Oxyé o referencial global da estrutura.
e corresponde ao sub-vector:
pp
i
p
p
p
p
pi
pi t
t
ffF =
=
43421ρ
αα
sen
cos
dif ipp
y
x
α
ρ0
f. ρ
f sen α
f
f cos α
i
i
i
i
pp
p
p
p
p
p
p
p
pp
i senf α
pp
if ρ
Uma força na direcção do pórtico é equivalente a:pif
tal que:
=
pN
p
p
F
F
F
,
,1
M
=pN
p
p
d
d
d M
1
=p
N
p
p
f
f
f M
1
FEUP - 2010

António Arêde 156
pipipip
i vud ρθαα ++= sencos
=
i
i
i
i v
u
a
θ
iTp
pi atd ⋅=
aTd Tpp =
=
Na
a
a
aM
2
1
pGp FaK =
Contribuição da rigidez
do pórtico p para a
matriz de rigidez global
Solicitação no pórtico p expressa
no referencial global.
=Tp
Tp
Tp
Tp
t
t
t
T
~
~
0
0
Relativamente à rigidez de translação, as paredes dos núcle os de caixade escadas e/ou elevadores também podem (geralmente, devem ) entrardeste modo, especialmente quando se encontram ligadas a out roselementos verticais através de vigas com rigidez à flexão si gnificativa.
Também ao nível dos deslocamentos se tem:
e definindo o seguinte sub-vector:
vem
Ou seja, em termos dos vectores relativos a todos o s pisos:
Pelo que a relação de rigidez local se pode transfor mar do seguinte modo
ppTppp fTaTKT =aT
fdK
Tp
ppp =↑
⋅⋅ pp TT} ⇔
ecom
y
x
α
θ i
ui
iv
dip
p
e assim obter a equação de equilíbrio global sobrep ondo as contribuições de todos os pórticos e paredes ( pp):
ppGppG FaK ,, = onde ∑=p
GpppG KK , = matriz de rigidez global
devida a pórticos e paredes
FEUP - 2010

António Arêde 157
++⋅
=
cN
N
GA
l
I
IhIl
EI
lhG
ls
22
12
2
( )vEGGIM ttt +== 12//ϕ
Se forem núcleos abertos, essa rigidez é praticament e desprezável.
Se forem núcleos fechados ou ligados por padieiras com rigidez elevadapode usar-se a teoria de Saint-Venant que relaciona o momento e curvatura de torção através da rigidez torsional GIt :
−−−− Vão da viga padieiral
−−−− Distância entre meios pisos vizinhosh
−−−− Área reduzida de corte da viga padieiracA
−−−− Momento de inércia da parcela da parede vertical do núcleoque condiciona a rotação de extremidade da à padieira (sãoos troços de parede adjacentes)
NI
ii) Contribuição da rigidez à torção dos núcleos
Procura-se substituir a zona das aberturas por uma parede mai s delgadacom uma espessura devidamente calibrada que garanta ao conj untouma rigidez equivalente à do núcleo com as aberturas.
A espessura da parede fictícia pode ser estimada por
o que permite calcular o momento de inércia de torção It do núcleofechado equivalente como um tubo de paredes delgadas de espe ssuravariável, e daí a respectiva rigidez torsional sob o piso i de pé-direito l i:
−−−− Momento de inércia da viga padieiraI
O núcleo dá origem a uma matriz de rigidez local referida apen as àsrotações em torno do eixo vertical em cada piso, cujos termos sãodepois directamente adicionados nas posições corresponde ntes damatriz de rigidez global da estrutura (tal como se faz para as bielas).
sl
AI
c
IN
onde:
iti lGIK /, =θ
FEUP - 2010

António Arêde 158
x
y
0
G
−
−=
pGG
G
G
i
Imxmy
mxm
mym
M 0
0
Estas forças, aplicadas em cada pórtico plano, permitem a su a resolução emconjunto com outras acções e assim obter resultados combina dos.
15.5.2 ANÁLISE DINÂMICA
15.5.2.1 Matriz de massa
15.5.2.2 Determinação de frequências, modos de vibr ação, etc.
Obtêm-se da forma habitual usando a matriz de rigidez e de mas sacom 3 g.l. por piso.
Os modos de vibração correspondem agora a movimentos puros o umistos nas direcções X e Y, envolvendo simultaneamente ou nã o,rotações globais de piso.
As frequências têm agora valores mais próximos entre si nos m odoscom a mesma ordem, mas em direcções distintas (ex.: modo 1X e 1 Y).
15.5.1.2 Resposta Global e Repartição pelos Element os Estruturais
onde Ip é o momento polar de inércia do piso i
referido ao eixo vertical que passa pelo centro decoordenadas geral O.
As várias sub-matrizes de cada piso são espalhadas na matriz d emassa global ao longo da diagonal principal de blocos de 3x3.
aTd Tpp = ppp
dKf =
A resolução do sistema de equações global ,FaK =onde a matriz K recebe a contribuição dos pórticos e paredes bem como
a dos núcleos e o vector F contém a solicitação exterior, permite obter
os deslocamentos globais a .
A partir destes últimos pode-se calcular os vectores dos des locamentoslocais de cada pórtico ou parede e das correspondentes força s dados por:
NucGK ,
ppGK ,
Admitindo massa concentrada ao nível dos pisos, pode-se def inir
a seguinte sub-matriz para o piso i:
FEUP - 2010

António Arêde 159
gnYgynXg
xnnnnnnn ΓuΓuΓywywy θξ θ &&&&&&&&& ++=++ 22
15.5.2.3 Análise modal - equações de equilíbrio desl igadas
15.5.2.4 Resposta máxima recorrendo a espectros reg ulamentares
Máxima coordenada modal n relativa à direcção de vibração j ( j = x,y, θθθθ):
Para cada modo de vibração
[ ]~~~~~
/....001001 nTn
TTn
xn MMΓ φφφ=
[ ]~~~~~
/....010010 nTn
TTn
yn MMΓ φφφ=
[ ]~~~~~
/....100100 nTn
TTnn MMΓ φφφθ =
jn
jd
jn ΓSy
n⋅=
( )∑∑ ⋅⋅=n j
jn
jdn LSqQ
n
2
max
ou usando uma combinação quadrática completa (CQC) nos modos seguidade uma combinação quadrática simples (CQS) nas direcções :
onde o coeficiente de correlação dos modos foi já atrás defin ido.mnρ
222 ;; nadnYa
Ydn
Xa
Xd wSSwSSwSS
nnnnnn
θθ ===
deslocamento espectral para o modo n e devido à direcção j
Recorrendo à combinação quadrática simples (CQS) , a respostamáxima para um parâmetro genérico Q da resposta vem
valor da quantidade genérica Q para a configuração do modo n
−−−− valores regulamentares de aceleração espectral (modo n)
cw
SS
n
aa
n
n 2
2=θ
c −−−− velocidade de propagação do movimento sísmico
nnn aYa
Xa SSS ==
−−−− aceleração espectral de rotação (modo n)
( ) ( )∑∑= =
⋅=N
n
N
m
jnnmn
jmm
j yqyqQ1 1
maxρ
( ) ( ) ( )2max
2
max
2
maxmaxθQQQQ YX ++=
θ,,YXj =
Máximo por direcção da acção
!! SINAIS !!
} Factores de participação modal jnΓ
e correspondentes massas modaisefectivas ( ) n
jn
jn MLM
2* =
FEUP - 2010

FEUP - 2011 António Arêde 160
Para projecto, o EC8 fornece explicitamente o desig nado ESPECTRO DE PROJECTO PARA ANÁLISE ELÁSTICA , que resulta do Espectro de Resposta
Elástico atrás apresentado, dividido pelo coeficien te de comportamento q,
calibrado para 5% de amortecimento.
Para os diversos ramos, as expressões do valor de cálculo Sd da aceleração
espectral assim obtida são as seguintes:
16.1 ASPECTOS GERAIS DE EDIFÍCIOS SISMO-RESISTENTES
A concepção deste tipo de estruturas deve atender o mais poss ível aosseguintes requisitos (a tentar impor logo na definição arqu itectónica):
� Simplicidade da estrutura
� Uniformidade, simetria e redundância estrutural
� Resistência e rigidez adequadas em duas direcções principa is de translação
� Resistência e rigidez de torção global
� Comportamento de diafragma rígido
� Fundações adequadas
:0 BTT ≤≤ ( )
−⋅+⋅⋅=
3
25.2
3
2
qT
TSaTS
Bgd
:DC TTT ≤≤ ( ) gC
gd aT
T
qSaTS ⋅≥
⋅⋅⋅= β5.2
:TTD ≤ ( ) gDC
gd aT
TT
qSaTS ⋅≥
⋅⋅⋅= β2
5.2
( )q
SaTS gd
5.2⋅⋅=:CB TTT ≤≤
onde β=0.2, é a fracção mínima de aceleração espectral de proje cto para
análise elástica, e o coeficiente de comportamento q é dado para cada tipo
de material, em função da tipologia estrutural e da classe de ductilidade adoptada para a estrutura (baixa, média ou alta).
16. DETERMINAÇÃO DOS EFEITOS DA ACÇÃO SÍSMICA DE ACORDO COM O EC8
16. DETERMINAÇÃO DOS EFEITOS DA ACÇÃO SÍSMICA DE ACORDO COM O EC8
16.2 ESPECTRO DE PROJECTO PARA ANÁLISE ELÁSTICA

António Arêde 161
Introduz-se a noção de elementos PRIMÁRIOS e elementos SECUNDÁRIOS, nosistema resistente à acção sísmica.
Embora não formalmente incluída no RSA, a prática corrente j á atendia a isto,por exemplo desprezando pilares e/ou vigas claramente secun dários e dealgum modo isolados e dispersos, que não se incluíam em nenhu m pórticoembora na verdade contribuíssem para a resistência lateral .
� Elementos secundários : não precisam de se incluídos no modelo estruturalde análise, mas no seu detalhe de projecto deve-se atender a q ue estãotambém submetidos aos deslocamentos impostos na estrutura global,embora não estejam obrigados ao requisitos de projecto e det alhe previstosno EC8. A totalidade da sua contribuição para a rigidez estru tural não deveexceder 15% da que é conferida pelos elementos primários.
� Elementos primários : todos os restantes que não são consideradossecundários (i.e. que formam sistemas porticados simples o u mistos) e queobviamente constituem o modelo estrutural de análise e estã o sujeitos àsregras de projecto e detalhe previstas no EC8
A classificação de estruturas quanto à sua regularidade em planta e em altura émais detalhada e consistente do que a do RSA, baseando-se em característicasessencialmente geométricas de relativamente simples apli cação (pontos 4.2.3.2e 4.2.3.3 do EC8 - EN 1998-1:2004) e muito bem explicados em Sismos eEdifícios (secções 12.4.3.1 e 12.4.3.2, da 1ª edição, 2008).
Esta classificação tem influência nos seguintes aspectos i mportantes:
� Tipo de modelo estrutural a adoptar, simplificado plano ou espacial .
� Método de análise , que pode ser simplificada com espectros de resposta(aplicação de forças laterais equivalentes) ou análise modal .
� Valor do coeficiente de comportamento , que é mais reduzido no caso deestruturas irregulares em altura .
16.3 ELEMENTOS ESTRUTURAIS SISMO-RESISTENTES
16.4 REGULARIDADE E IRREGULARIDADE ESTRUTURAL
FEUP - 2011

António Arêde 162
Esta influência é sistematizada no Quadro 4.1 do EC8:
A classificação mais consistente da regularidade em planta reflecte-se ainda naconsideração dos efeitos de torção que requer excentricidades acidentais no
centro de massa de cada piso i de apenas eai = ±0,05Li, sendo Li a dimensão do
piso i na direcção normal à da acção sísmica em estudo.
No contexto de análises planas com método simplificado de fo rças lateraisestáticas equivalentes, isto traduz-se por afectar os resul tados em cadasubestrutura resistente vertical por um factor idêntico ao do RSA ( ξ = 1+0.6 x/a),onde se prevê um agravamento do coeficiente 0.6 para 1.2 em ce rtos casos.
No âmbito de análises espaciais , a alteração da posição de centro de massa émuito complexa de materializar no processo de cálculo, pelo q ue é sugerida a
consideração de momentos de torção adicionais por piso Mai = eai Fi, sendo Fi
a força horizontal actuante no piso i na direcção em estudo, calculada com
base no método simplificado de análise estática.
FEUP - 2011

António Arêde 163
A acção sísmica, pelas suas particularidades de recorrênci a, é combinadaapenas como acção fundamental, acompanhada dos valores car acterísticos dasacções permanentes e dos valores quase-permanentes das acç ões variáveis,
este último definido através do coeficiente 2i tal como definido no EC0 – EN
1990:2002, Anexo A1.
A combinação para EXIGÊNCIA DE NÃO COLAPSO (NCR), correspondente àverificação em Estado Limite Último, é então dada por:
onde é de notar que a acção sísmica (AEd), conforme já obtida do espectro deprojecto, é já um valor de cálculo (não devendo portanto ser majorada porquetal já está contemplado no novo espectro de resposta). Isto é uma diferençaimportante relativa ao RSA .
A combinação para EXIGÊNCIA DE LIMITAÇÃO DE DANOS (DLR), para averificação em Estado Limite de Serviço, é dada pela mesma ex pressão, masdepois os deslocamentos horizontais relativos entre pisos ( dr = drift) assim
obtidos são afectados do coeficiente de redução ν, que vale 0,4 ou 0,55,
conforme a Acção Sísmica é do Tipo 1 ou 2, respectivamente.
Para a quantificação dos efeitos sísmicos, a massa mobilizada é calculada com
os novos coeficientes ψEi=φ.ψ2i em vez dos ψ2i como no RSA. O coeficiente φ,
designado de coeficiente de ocupação, está tabelado no EC8 ( Quadro 4.2).
� O método de referência é o método de análise modal por espectros deresposta , usando um modelo linear-elástico da estrutura e o espectro deprojecto já apresentado.
� No domínio das análises lineares elásticas, podem ser usado s os métodos:
a) de forças laterais estáticas equivalentes (só em certos c asos)
b) de análise modal por espectros de resposta, válido para to dos oscasos.
� Alternativamente à análise linear elástica, podem ser usad os os métodos:
c) de análise estática não linear sob dois padrões possíveis de distribuição em altura de forças horizontais nos pis os (pushover)
d) de análise não linear dinâmica no domínio do tem po, usando um conjunto adequado de acelerogramas na base.
16.5 COEFICIENTES DE COMBINAÇÃO PARA ACÇÕES VARIÁVEIS
16.6 MÉTODOS DE ANÁLISE (secção 4.3.3 do EC8)
FEUP - 2011

António Arêde 164
� O EC8 admite como processo de referência, a combinação quadr áticasimples (CQS) das respostas a cada uma das componentes da acç ãosísmica (tal como já analisado anteriormente).
� Como alternativa, admite também a conhecido regra do 1-1/3, impondo ocálculo e análise das duas seguintes combinações:
onde “+” significa “a combinar com”, EEdx e EEdy representa os efeitosresultantes da aplicação da acção sísmica, respectivament e, nas direcções X eY da estrutura.
� Condição de resistência em ELU: Ed ≤ Rd
� Efeitos de 2ª ordem podem ser desprezados se for cumprida a co ndiçãoseguinte:
onde θ, é o designado coeficiente de sensibilidade ao deslocament o relativo ( dr)
entre pisos cujo pé-direito é h, Ptot é a carga gravítica vertical total até ao piso
em estudo e Vtot é a força de corte sísmica sob esse piso. Na prática aquela
relação impõe que o momento global de 2ª ordem no piso devido a o drift nãoseja superior a 10% do momento derrubador provocado por aque la força decorte em relação ao piso inferior.
� Verificações globais e locais de ductilidade, que podem inc luir:
i) requisitos de dimensionamento por capacidade resistente , de forma a
obter uma hierarquia de resistência dos elementos que assegure a formaçãode zonas dissipativas ( rótulas plásticas ) em locais devidamente escolhidos(nas extremidades da vigas e não dos pilares) e evite modos de roturafrágeis (corte) ���� capacity design
ii) garantia de não formação de pisos fracos (soft-storey)
iii) imposição de sobre-resistência
dos pilares face às vigas nos nós
16.7 COMBINAÇÃO DE EFEITOS DAS COMPONENTES DA ACÇÃO SÍSMICA
16.8 VERIFICAÇÕES DE SEGURANÇA (secção 4.4 do EC8)
16.8.1 Estado limite último (NCR) - lista não exaust iva
FEUP - 2011

António Arêde 165
O EC8 impõe limites máximos ao drift entre pisos, consoante o tipo deelementos não-estruturais que podem ser afectados por drif ts excessivos,admitindo três situações distintas:
� Elementos frágeis não estruturais ligados à estrutura:
� Elementos dúcteis não estruturais ligados à estrutura:
onde o significado de todos os símbolos já foi antes apresent ado.
� Baixa (L = Low), a utilizar apenas em zonas de baixa sismicidade , onde a
aceleração espectral na base agSnão exceda 0.98m/s 2 (≈0.1g).
� Média (M = Medium), a utilizar nas zonas de média e alta sismicid ade,incluindo já requisitos de capacity deisgn (controle de for mação de rótulasplásticas e de prevenir roturas por corte)
� Alta (H = High), a utilizar nas mesmas zonas, com requisitos ain da maisexigentes de capacity design (tratamento detalhado dos nós , imposição derestrições de armadura longitudinal máxima, maior quantid ade e maisestribos, etc.
� Elementos não estruturais inexistentes ou ligados àestrutura de modo a não interferir com asdeformações desta (isolados, portanto):
� Baixa (L = Low): q max = 1.5
� Média e Alta (M e H): secção 5.2.2.2 EC8, Quadro 5.1
16.9 CLASSES DE DUCTILIDADE E COEFICIENTES DE COMPORTAMENT OEM EDIFÍCIOS DE BETÃO ARMADO
16.8.2 Estado limite de serviço (DLR)
16.9.1 Classes de ductilidade
16.9.2 Coeficientes de comportamento
FEUP - 2011