ANÁLISE DINÂMICA DE TRANSMISSÕES POR CORRENTE …
29
LISBOA | 18 JUNHO 2014 ANÁLISE DINÂMICA DE TRANSMISSÕES POR CORRENTE UTILIZANDO UMA ABORDAGEM MULTICORPO CÂNDIDA PEREIRA MALÇA ISEC/INSTITUTO POLITÉCNICO DE COIMBRA [email protected]
Transcript of ANÁLISE DINÂMICA DE TRANSMISSÕES POR CORRENTE …

LISBOA | 18 JUNHO 2014
ANÁLISE DINÂMICA DE TRANSMISSÕES POR CORRENTE
UTILIZANDO UMA ABORDAGEM MULTICORPO
CÂNDIDA PEREIRA MALÇA
ISEC/INSTITUTO POLITÉCNICO DE COIMBRA

LISBOA | 18 JUNHO 2014
TRANSMISSÕES MECÂNICAS
TRANSMISSÕES POR CORRENTE
FORMULAÇÃO MULTICORPO
ANÁLISE DINÂMICA
ANÁLISE DINÂMICA DE TRANSMISSÕES POR CORRENTE
UTILIZANDO UMA ABORDAGEM MULTICORPO
CONTRIBUIÇÕES

LISBOA | 18 JUNHO 2014
TRANSMISSÕES MECÂNICAS
CATERPILLAR D9H

LISBOA | 18 JUNHO 2014
TRANSMISSÕES POR CORRENTE
AUDI V6

LISBOA | 18 JUNHO 2014
TRANSMISSÕES POR CORRENTE
WARTSILA ENGINE

LISBOA | 18 JUNHO 2014
TRANSMISSÕES POR CORRENTE
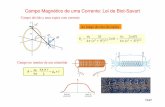
Zoom1
Zoom2

LISBOA | 18 JUNHO 2014
Pitch
Inner Link
Outer Link
Pin
Zoom1:
Bushing
Roller
Clearance Pin/Bushing
Clearance Bushing/Roller
TRANSMISSÕES POR CORRENTE

LISBOA | 18 JUNHO 2014
Pitch
ηsr
ηi
θi
·
Rs
ξsr
ξi
θi
θs
α
X
Y
ri
r
rcr
r
scr
r
Pitch
ηsr
ηi
θi
·θi
·
Rs
ξsr
ξi
θi
θs
α
X
Y
ri
rri
r
rcr
rrcr
r
scr
rscr
r
TRANSMISSÕES POR CORRENTE
Zoom 2:

LISBOA | 18 JUNHO 2014
DINÂMICA DE SISTEMAS DE CORPOS MÚLTIPLOS
Body 1Body 1
Revolute joint
Body 2
Body i
Body 3
Multi-revolute jointwith clearance
Actuator
Spherical joint
Spring/DamperApplied forces
Flexible body Translational joint
Contact bodies
Body n
Gravitationalacceleration field
Spring
Body j
Lubricated joint
Ground body
Applied Torque
Revolute jointwith clearance
Body K

LISBOA | 18 JUNHO 2014
MECANISMO BIELA - MANIVELA
DINÂMICA DE SISTEMAS DE CORPOS MÚLTIPLOS
Clearance
1η
1ξ
4η
3η2η2ξ
3ξ
4ξX
Y
1
2
3
4
Clearance
1η
1ξ
4η
3η2η2ξ
3ξ
4ξX
Y
1
2
3
4

LISBOA | 18 JUNHO 2014
Pankoke et al, 1998 Silva et al, 1997
MODELAÇÃO DO MOVIMENTO HUMANO
DINÂMICA DE SISTEMAS DE CORPOS MÚLTIPLOS

LISBOA | 18 JUNHO 2014
III
XII
5
V
VI
X
VII
II IV
IX
XII
VIII
XI
XIV
1
8
2
4
7
11
9
3
6
12
10
13
I
Body no. 50% Human Male
Li [m]
50% Human Male
Mass [Kg] *
I 0.260 14.2
II 0.250 24.9
III 0.230 4.24
IV 0.320 1.99
V 0.260 1.84
VI 0.320 1.99
VII 0.260 1.84
VIII 0.410 9.84
IX 0.385 4.81
X 0.410 9.84
XI 0.385 4.81
XII 0.160 1.06
XIII 0.053 1.62**
XIV 0.053 1.62 **
L3-5 (a) 0.375 -
L6-7 (a) 0.188 -
L1-2 (b) 0.199 -
L1-3 (b) 0.155 -
MODELO
BIOMECÂNICO
MASSAS E DIMENSÕES DOS
CORPOS RÍGIDOS
Source: Silva et al. (1997)
DINÂMICA DE SISTEMAS DE CORPOS MÚLTIPLOS

LISBOA | 18 JUNHO 2014
DINÂMICA DE SISTEMAS DE CORPOS MÚLTIPLOS
−−−−−−−−====
ΦΦγ
g
λ
q
0Φ
ΦM
q
q
2
T
2 βα &
&&
CLEARANCE REVOLUTE JOINTS
PERFECT KINEMATIC JOINTS

LISBOA | 18 JUNHO 2014
Read input data
Is t >tend ?
ttt ∆++++====
Yes
No
STOP
START
Evaluate
gGeneralized forces,
Φq
Jacobian matrix,
MSystem mass matrix,
γΦConstraint functions, ,
0qq ====
t
0==== tt
==== &&0
qqt
Solve linear equations ofmotion for andq&& λ
T =
q
q
M Φ q g
Φ 0 λ γ
&&
Form the auxiliary vector
TTT][qy && ====
tq&&
Integrate the auxiliary vector
∆y ====
++++ tt
TTT][q q&
DINÂMICA DE SISTEMAS DE CORPOS MÚLTIPLOS

LISBOA | 18 JUNHO 2014
DINÂMICA DE SISTEMAS DE CORPOS MÚLTIPLOS

LISBOA | 18 JUNHO 2014
DINÂMICA DE SISTEMAS DE CORPOS MÚLTIPLOS
X
Y
ηηηηi
ξξξξi
(i)
Oi
(j)
ηηηηj
ξξξξjOj
PiPj
Qj
Qi
rP
is
rP
js
re
rP
irrP
jrrir
rjr
δr
rn
rt
1. ECCENTRICITY VECTOR
P P
j i= −e r r
2. ECCENTRICITY
Te = e e
3. PENETRATION (C - CLEARANCE)
δ e c= −
4. NORMAL AND TANGENT VECTORS
e=n eT
y xn n = − t
5 . CONTACT FORCE
( ) ( )*
234 ( )
0.49∆R + 0.1 E1 1
∆R −
= + −
f n
&
&144424443
n
n r
lc
K
δδ
δ
( )1
t f d n T Tc c f v
−= −f v

LISBOA | 18 JUNHO 2014
DINÂMICA DE SISTEMAS DE CORPOS MÚLTIPLOS
1
26
7
4
53
a*
b*
c* c
b
a
d* dcc
bc*
cc*
bc
oc
RIGHT SIDELEFT SIDE
TOOTH CENTER LINE

LISBOA | 18 JUNHO 2014
DINÂMICA DE SISTEMAS DE CORPOS MÚLTIPLOS
IF AND
THERE IS CONTACT WITH THE SEATING CURVE
1 12 2θ θ θ− ≤ ≤
o e o( ) 0e t r
R Rδ = − − >eIF
THERE IS NO CONTACT AT
ALL
( ) 0e t rR Rδ = − − ≤e
����
����
����
���� ����
����
����
����
2Rr
θe
Rt
cc*cc ηηηηst
θo
oc
ξξξξst
����
δr
e
crsr
er
ocsr
Qt
Qr

LISBOA | 18 JUNHO 2014
DINÂMICA DE SISTEMAS DE CORPOS MÚLTIPLOS
Strand A
Strand B
(K)
Strand C
(i)(j)
Pi
Strand A
Strand B
(K)
Strand C
(i)(j)
Pi

LISBOA | 18 JUNHO 2014
DINÂMICA DE SISTEMAS DE CORPOS MÚLTIPLOS
( )1a 1b
1a 1b1
× ϕ ≥ ϕ=
+ × ϕ < ϕstrand
n Pitch ifL
n Pitch if
1a 1b
_ _
1a 1b
1
2
+ ϕ ≥ ϕ=
+ ϕ < ϕPins in strand
n ifN
n if
i jP - P = ×n Pitchpd
=
n integerPitch
X
(n+1)×Pitch
Y
n×Pitch
rj
riP- rj
φ1a φ1b
Pj*(position1b)
r
Pi
Rj
(i)(j)
r
r
riPr
Pj*(position1a)
X
(n+1)×Pitch
Y
n×Pitch
rj
riP- rj
φ1a φ1b
Pj*(position1b)
r
PiPi
Rj
(i)(j)
r
r
riPr
Pj*(position1a)

LISBOA | 18 JUNHO 2014
DINÂMICA DE SISTEMAS DE CORPOS MÚLTIPLOS
δ1a
δ1b
Pk (position1b)
X
αj
n×αj
(n+1)×αj
(j)
ψ
Pj
Strand BStrand A
Y
δ1a
δ1b
Pk (position1a)
rj
rrjP
r
ujP
r
rjk
r
sk
rsP
r
δ1a
δ1b
Pk (position1b)
X
αj
n×αj
(n+1)×αj
(j)
ψ
Pj
Strand BStrand A
Y
δ1a
δ1b
Pk (position1a)
rj
rrjP
r
ujP
r
rjk
r
sk
rsP
r
j
n integer ψ
= α
T
p k
2
j
cosR
ψ =s s
( ) ( )
( ) ( )
( ) ( )
( ) ( )
( ) ( )
( ) ( )
( ) ( )
/ 4
3 / 4
2 5 / 4
2
2
arccos cos if cos αnd sin
arcsin sin if
arccos cos if cos αnd sin
arcsin sin if
arcsin sin if cos αnd sin
arccos cos if
arccos cos if cos αnd sin
arcsin sin
ψ = ψ ψ ≥ 0 ψ ≥ 0
ψ = ψ ψ < π
ψ = ψ ψ < 0 ψ ≥ 0
ψ = π − ψ ψ > π
ψ = π − ψ ψ ≤ 0 ψ < 0
ψ = π − ψ ψ > π
ψ = π − ψ ψ > 0 ψ < 0
ψ = π + ( ) ( )7 / 4ifψ ψ > π
x y y xp k p k
2
j
sinR
ψ =s s - s s
k
k j j=s r - rP
P j j=s r - r

LISBOA | 18 JUNHO 2014
DINÂMICA DE SISTEMAS DE CORPOS MÚLTIPLOS
Rc
ββ
ββ β
(K)
Strand C
Pi
X
Y
c
ψ
r
Pm (position 1a)
Pm (position 1b)
(i)
rc
r
uk
Pn (position 1a)
Pn (position 1b)
rm
r
rn
r
Rc
ββ
ββ β
(K)
Strand C
PiPi
X
Y
c
ψ
r
Pm (position 1a)
Pm (position 1b)
(i)
rc
r
uk
Pn (position 1a)
Pn (position 1b)
rm
r
rn
r
( ) ( )
( ) ( )
T2
c m c m
T2
c n c n
c
c
R
R
=
=
r - r r - r
r - r r - r
sec =
Ln integer
Pitch
sec m n= r r-L
arcL n Pitch= ×arc c
L R= ψ ×
PRÉ-TENSION

LISBOA | 18 JUNHO 2014
ANÁLISE DINÂMICA
WITHOUT PRETENSION WITH A PRETENSION OF 25 N

LISBOA | 18 JUNHO 2014
ANÁLISE DINÂMICA

LISBOA | 18 JUNHO 2014
ANÁLISE DINÂMICA

LISBOA | 18 JUNHO 2014
ANÁLISE DINÂMICA

LISBOA | 18 JUNHO 2014
ANÁLISE DINÂMICA

LISBOA | 18 JUNHO 2014
CONTRIBUIÇÕES
COMPORTAMENTO CINEMÁTICO E DINÂMICOGEOMETRIAMATERIAISDESGASTE
…
CONCEPÇÃO E OTIMIZAÇÃO DE MECANISMOS (E OUTRO TIPO DE SISTEMAS)
FOLGASATRITO
DISSIPAÇÃO DE ENERGIALUBRIFICAÇÃO
VIDA ÚTIL…

LISBOA | 18 JUNHO 2014
ANÁLISE DINÂMICA DE TRANSMISSÕES POR CORRENTE
UTILIZANDO UMA ABORDAGEM MULTICORPO
CÂNDIDA PEREIRA MALÇA
ISEC/INSTITUTO POLITÉCNICO DE COIMBRA