5 Control por realimentación del estado - OCW...
24
1 U.P.M.-DISAM P. Campoy Electrónica y Regulación 1 Control por realimentación del estado • Introducción • Realimentación del estado • Control de sistemas monovariables • Control de sistemas multivariables U.P.M.-DISAM P. Campoy Electrónica y Regulación 2 Introducción: ejemplo (1/2) 1 Ts k + s 1 ω α ref motor ) (s G C + - 1 Ts k + s 1 control clásico α α ref α ω 1 Ts k + + s 1 + 1 K 2 K + + control por realimentación del estado ω α
Transcript of 5 Control por realimentación del estado - OCW...
1
U.P.M.-DISAM P. Campoy Electrónica y Regulación 1
Control por realimentacióndel estado
• Introducción• Realimentación del estado• Control de sistemas monovariables• Control de sistemas multivariables
U.P.M.-DISAM P. Campoy Electrónica y Regulación 2
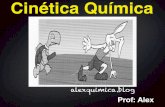
Introducción: ejemplo (1/2)
1Ts
k
+ s
1
ωαref
motor
)(sGC
+-
1Ts
k
+ s
1
control clásico
α αref αω1Ts
k
+
+s
1
+1K
2K
+
+
control por realimentación del estado
ω α
2
U.P.M.-DISAM P. Campoy Electrónica y Regulación 3
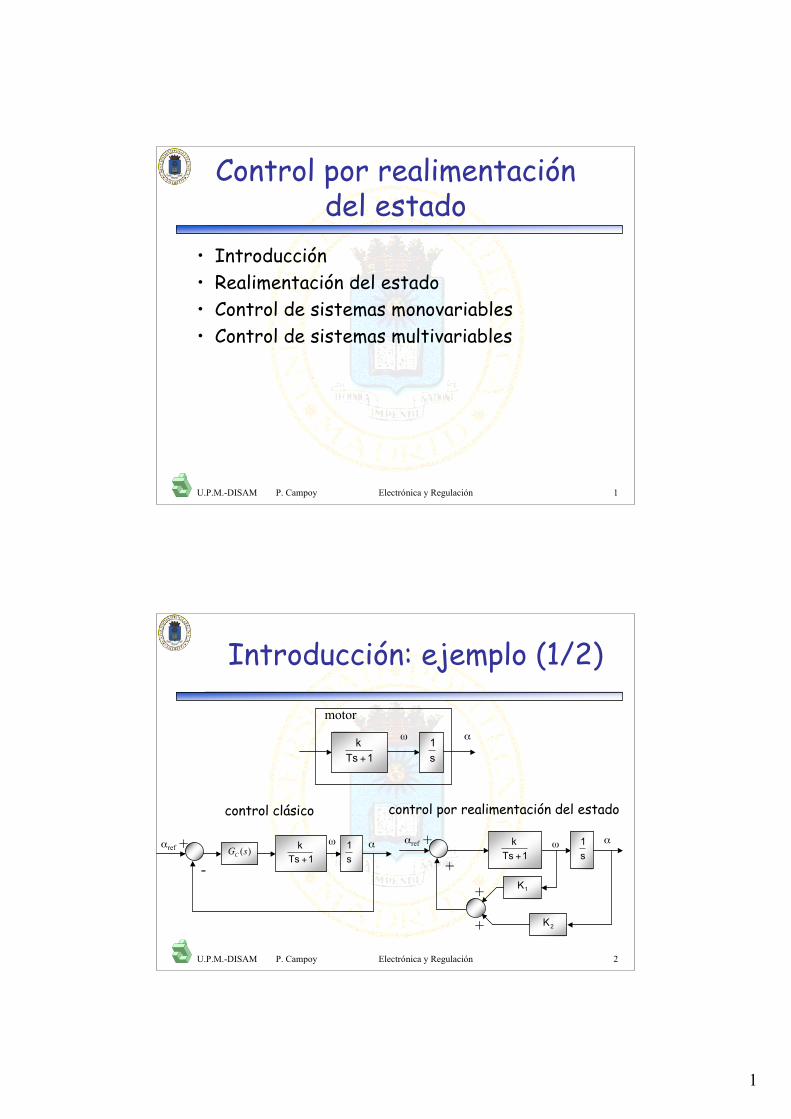
Introducción: ejemplo (2/2)
• Ventajas de la realimentación del estado:– se usa toda la información del sistema para
calcular la entrada manipulada– no se usan derivadores de difícil realización
física, sino elementos proporcionales
1Ts
k
+
+s
1
+1K
2K
+
+
+
+21KsK
1
+21KsK +
1Ts
k
+ s
1
=
U.P.M.-DISAM P. Campoy Electrónica y Regulación 4
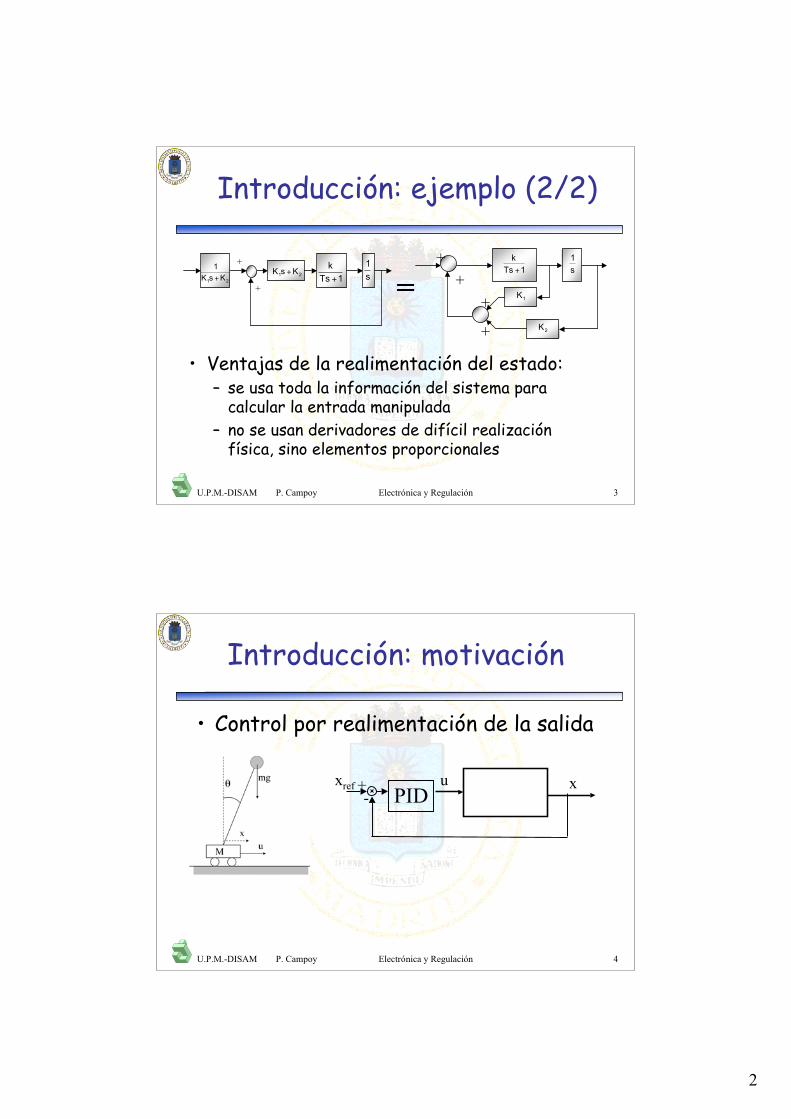
Introducción: motivación
• Control por realimentación de la salida
u xPID-
+xref
3
U.P.M.-DISAM P. Campoy Electrónica y Regulación 6
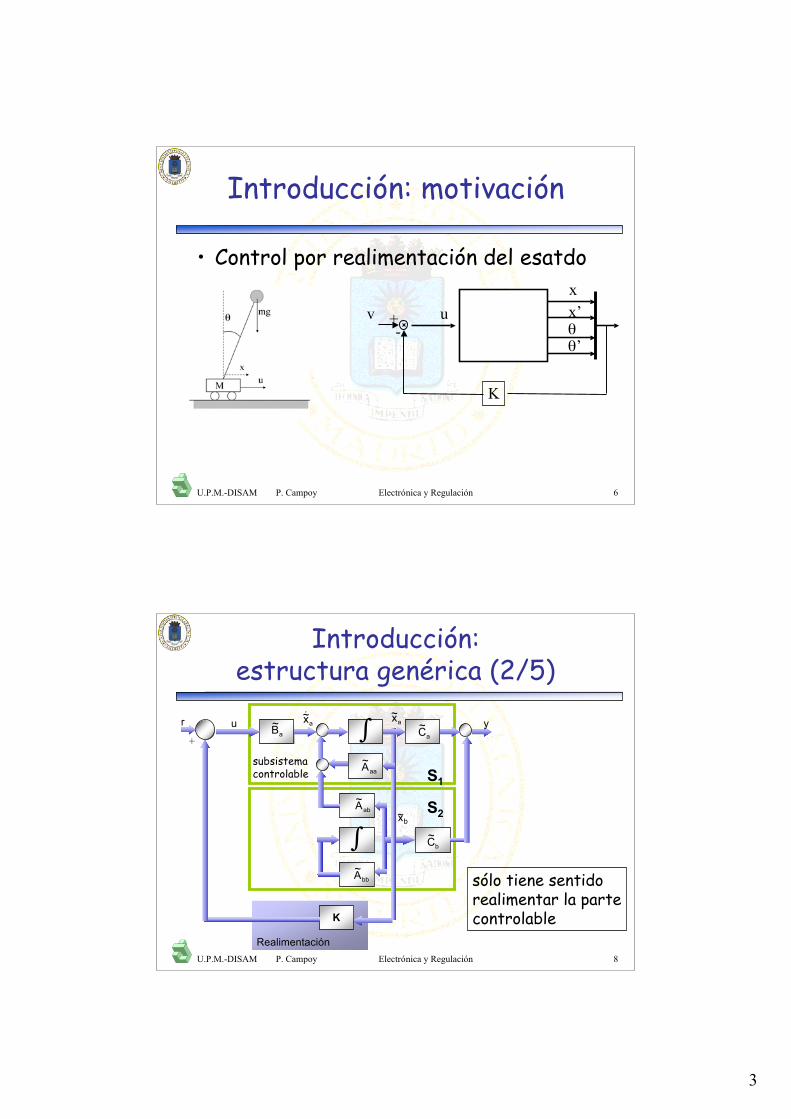
Introducción: motivación
• Control por realimentación del esatdo
θu
xx’
θ’-
+v
K
U.P.M.-DISAM P. Campoy Electrónica y Regulación 8
Introducción:estructura genérica (2/5)
aB~
aaA~
∫u
bC~∫
abA~
bbA~
aC~
S1
S2
ax~&
ax~
y
bx~
K
+
r
Realimentación
subsistemacontrolable
sólo tiene sentidorealimentar la partecontrolable
4
U.P.M.-DISAM P. Campoy Electrónica y Regulación 9
Control por realimentacióndel estado
• Introducción• Realimentación del estado• Control de sistemas monovariables• Control de sistemas multivariables
U.P.M.-DISAM P. Campoy Electrónica y Regulación 10
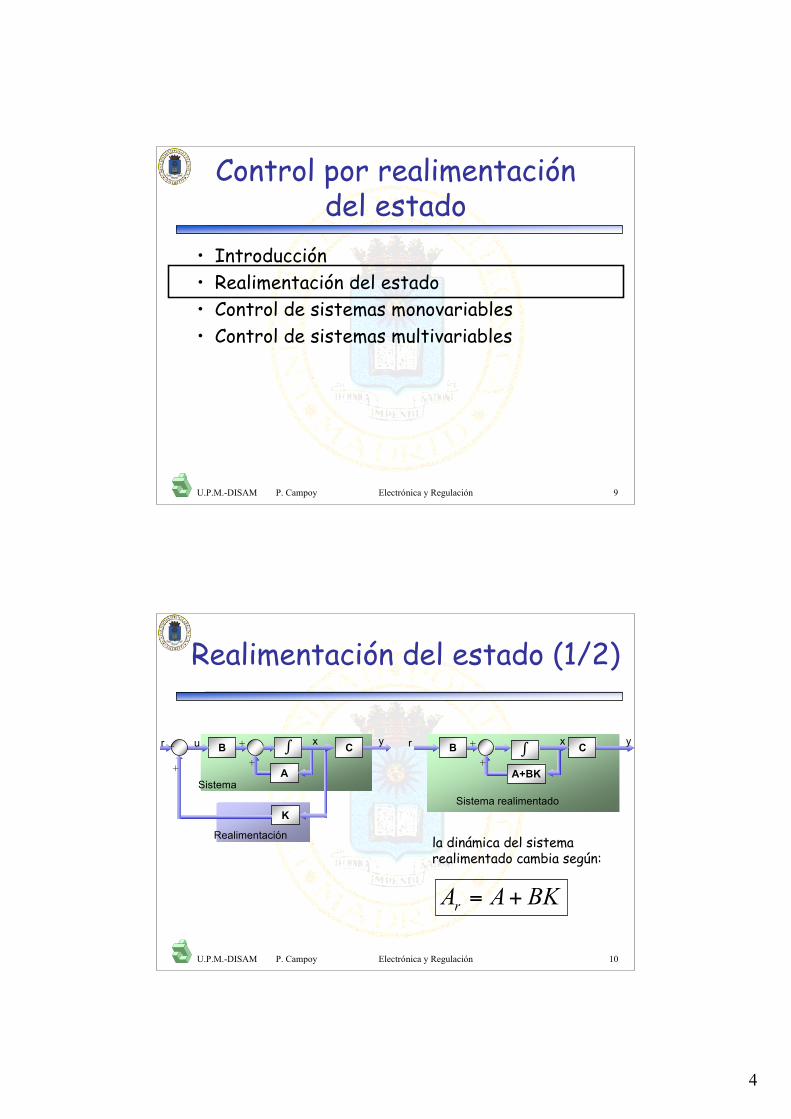
Realimentación del estado (1/2)
∫ CB
A
+
+
K
+
+
x yur
Sistema
Realimentación
∫ CB
A+BK
+
+
x yr
Sistema realimentado
BKAAr
+=
la dinámica del sistemarealimentado cambia según:
5
U.P.M.-DISAM P. Campoy Electrónica y Regulación 11
Realimentación del estado(2/2)
• Objetivo:cálculo de K para conseguir la dinámica dada por Ar
• Características:– sistema con nxn ecuaciones y nxm incógnitas
BKAAr
+=
• Conclusiones:– no todas las matrices Ar son posibles– se debe usar una base del espacio de estado en la que
las ecuaciones sean compatibles y sencillas de resolver
U.P.M.-DISAM P. Campoy Electrónica y Regulación 12
Control por realimentacióndel estado
• Introducción• Realimentación del estado• Control de sistemas monovariables• Control de sistemas multivariables
6
U.P.M.-DISAM P. Campoy Electrónica y Regulación 13
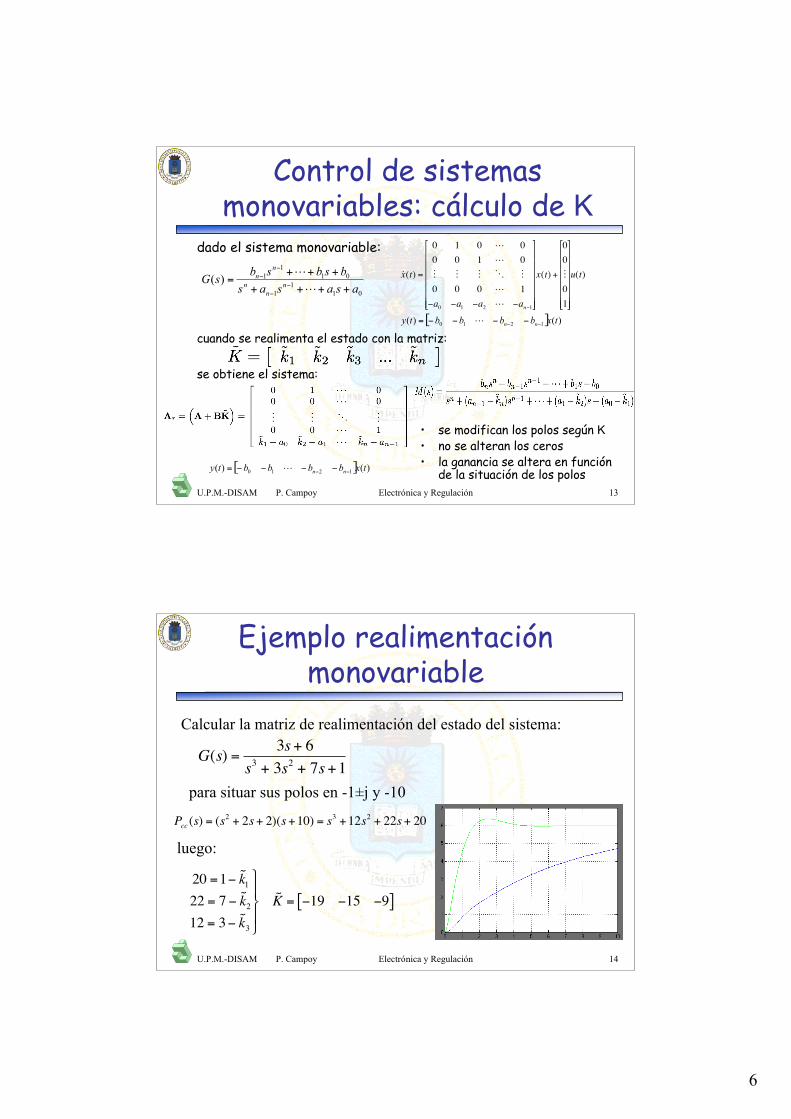
Control de sistemasmonovariables: cálculo de K
dado el sistema monovariable:
01
1
1
01
1
1)(asasas
bsbsbsG
n
n
n
n
n
++++
+++=
!
!
!
!
L
L
!
˙ x (t) =
0 1 0 L 0
0 0 1 L 0
M M M O M
0 0 0 L 1
"a0
"a1
"a2
L "an"1
#
$
% % % % % %
&
'
( ( ( ( ( (
x(t) +
0
0
M
0
1
#
$
% % % % % %
&
'
( ( ( ( ( (
u(t)
[ ] )()( 1210 txbbbbty nn !! !!!!= L
cuando se realimenta el estado con la matriz:
• se modifican los polos según K• no se alteran los ceros• la ganancia se altera en función
de la situación de los polos
se obtiene el sistema:
[ ] )()( 1210 txbbbbty nn !! !!!!= L
U.P.M.-DISAM P. Campoy Electrónica y Regulación 14
Ejemplo realimentaciónmonovariable
Calcular la matriz de realimentación del estado del sistema:
para situar sus polos en -1±j y -10
!
G(s) =3s+ 6
s3
+ 3s2
+ 7s+1
!
Pcc(s) = (s
2+ 2s+ 2)(s+10) = s
3+12s
2+ 22s+ 20
luego:
!
20 =1" ˜ k 1
22 = 7 " ˜ k 2
12 = 3" ˜ k 3
#
$ %
& %
˜ K = "19 "15 "9[ ]
7
U.P.M.-DISAM P. Campoy Electrónica y Regulación 15
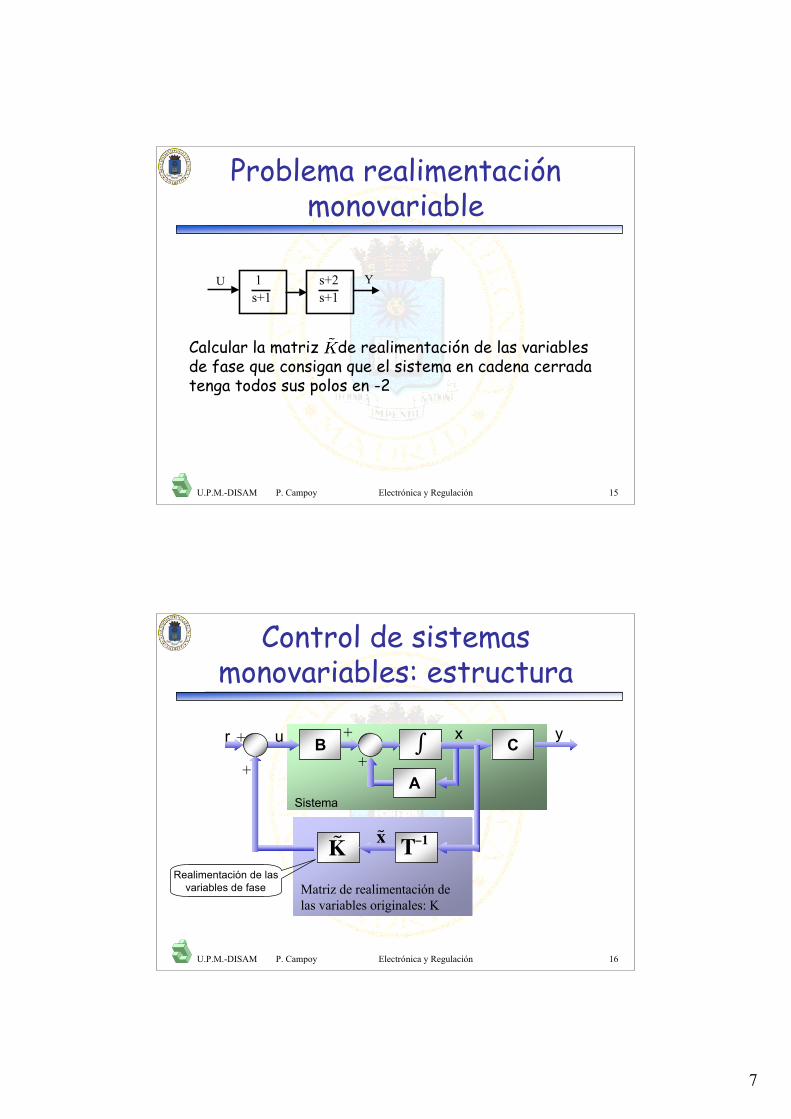
Problema realimentaciónmonovariable
U s+2s+1
1s+1
Y
Calcular la matriz de realimentación de las variablesde fase que consigan que el sistema en cadena cerradatenga todos sus polos en -2
U.P.M.-DISAM P. Campoy Electrónica y Regulación 16
Matriz de realimentación delas variables originales: K
Control de sistemasmonovariables: estructura
∫ CB
A
+
++
+
x yur
Sistema
!
˜ K
!
˜ x
Realimentación de lasvariables de fase
!
T"1
8
U.P.M.-DISAM P. Campoy Electrónica y Regulación 17
Control de sistemasmonovariables: calculo de T
• Cálculo de la matriz de cambio de base T tal que:
!
Q = B AB L An"1B[ ]
!!!!!
"
#
$$$$$
%
&
='
T
n
T
T
e
e
e
QM
2
1
1
!!!!!
"
#
$$$$$
%
&
=
'
'
1
1
nT
n
T
n
T
n
Ae
Ae
e
TM
!
x = T˜ x
donde x son las variables originales y son las variables de fase
!
˜ x
U.P.M.-DISAM P. Campoy Electrónica y Regulación 18
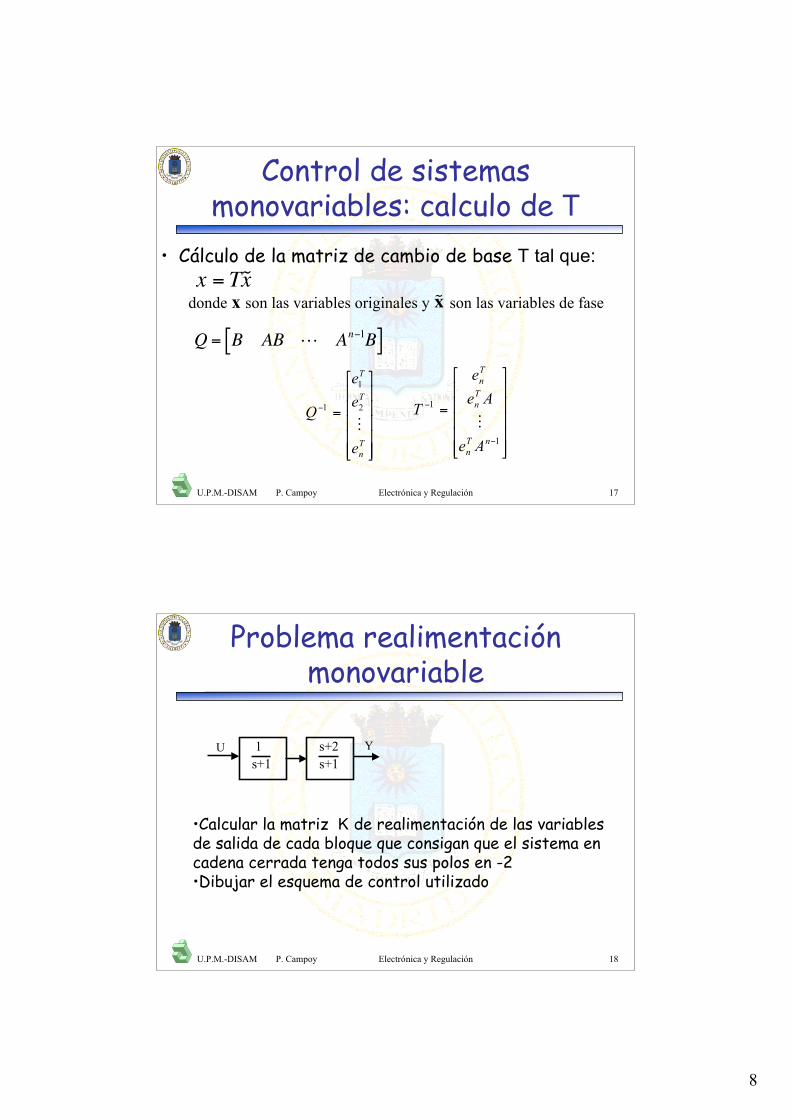
Problema realimentaciónmonovariable
U s+2s+1
1s+1
Y
•Calcular la matriz K de realimentación de las variablesde salida de cada bloque que consigan que el sistema encadena cerrada tenga todos sus polos en -2•Dibujar el esquema de control utilizado
9
U.P.M.-DISAM P. Campoy Electrónica y Regulación 19
Resolución
cálculo de matriz de realimentación variables de fase:
cálculo de la matriz de cambio de base:
cálculo de la matriz de realimentación de las variables originales:
U.P.M.-DISAM P. Campoy Electrónica y Regulación 20
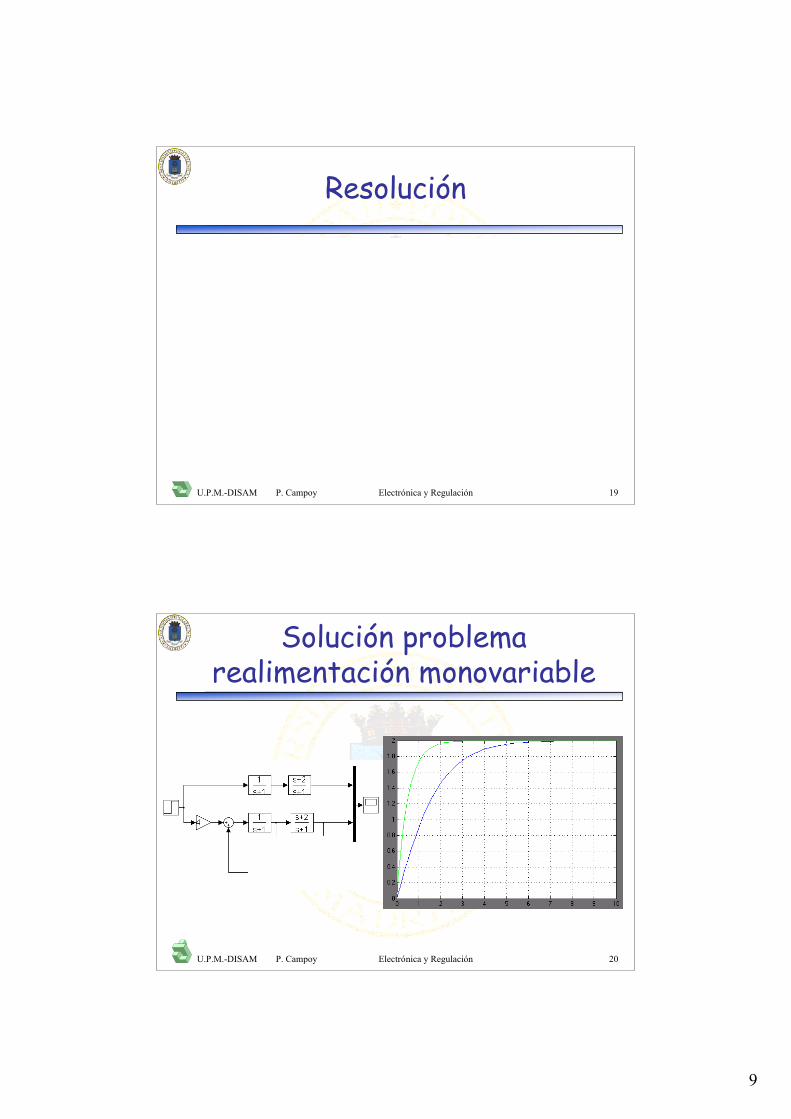
Solución problemarealimentación monovariable
10
U.P.M.-DISAM P. Campoy Electrónica y Regulación 21
Control por realimentacióndel estado
• Introducción• Realimentación del estado• Control de sistemas monovariables
– Control con error de posición nulo• Control de sistemas multivariables
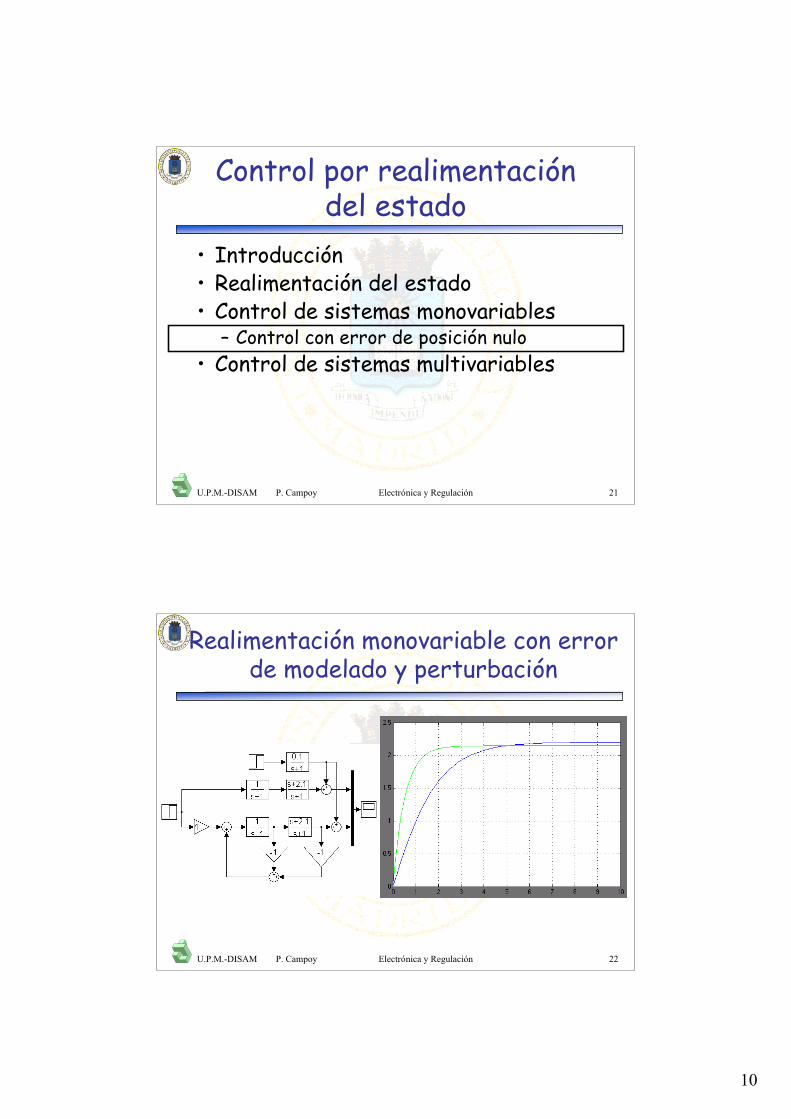
U.P.M.-DISAM P. Campoy Electrónica y Regulación 22
Realimentación monovariable con errorde modelado y perturbación
11
U.P.M.-DISAM P. Campoy Electrónica y Regulación 23
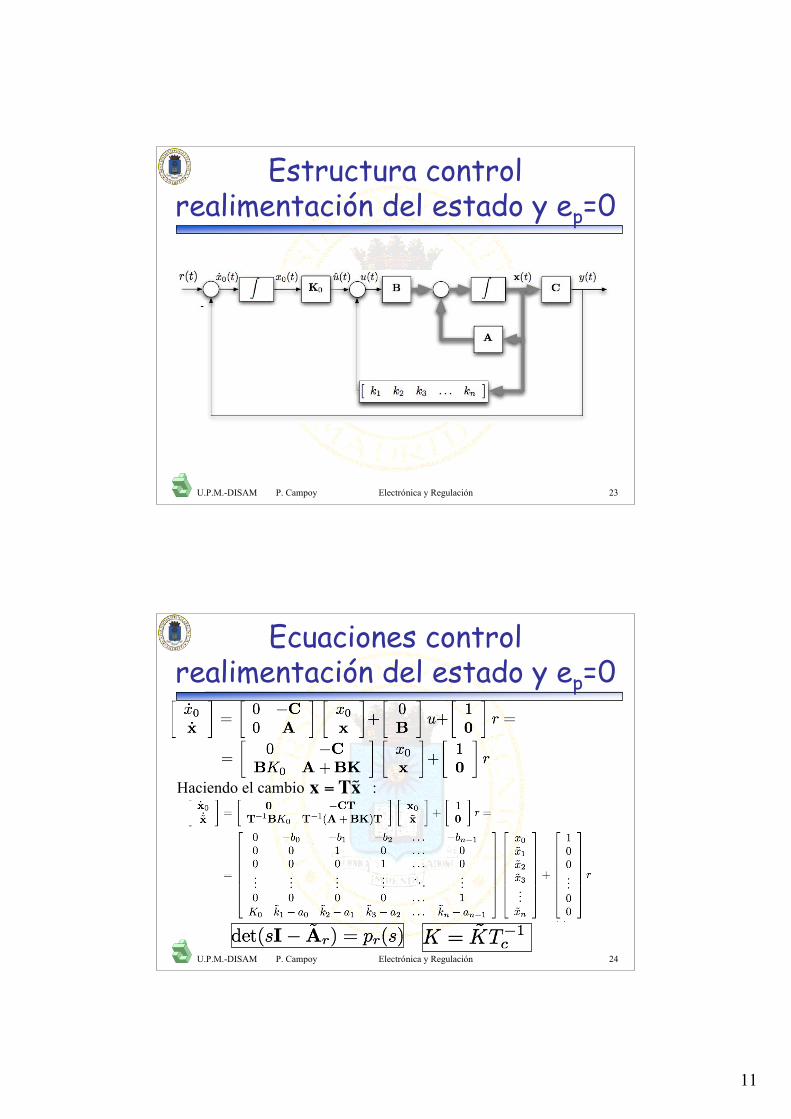
Estructura controlrealimentación del estado y ep=0
U.P.M.-DISAM P. Campoy Electrónica y Regulación 24
Ecuaciones controlrealimentación del estado y ep=0
Haciendo el cambio :
!
x = T˜ x
12
U.P.M.-DISAM P. Campoy Electrónica y Regulación 25
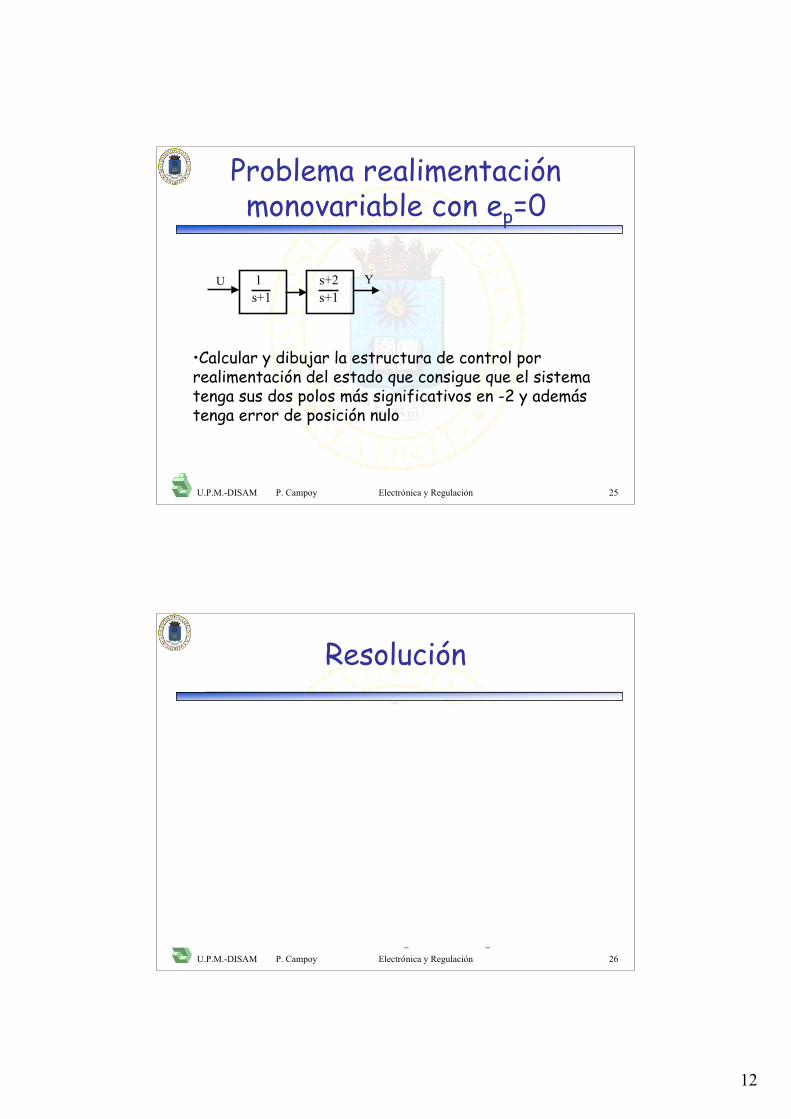
Problema realimentaciónmonovariable con ep=0
U s+2s+1
1s+1
Y
•Calcular y dibujar la estructura de control porrealimentación del estado que consigue que el sistematenga sus dos polos más significativos en -2 y ademástenga error de posición nulo
U.P.M.-DISAM P. Campoy Electrónica y Regulación 26
Resolución
cálculo de matriz de realimentación variables de fase:
cálculo de matriz de realimentación variables originales:
13
U.P.M.-DISAM P. Campoy Electrónica y Regulación 27
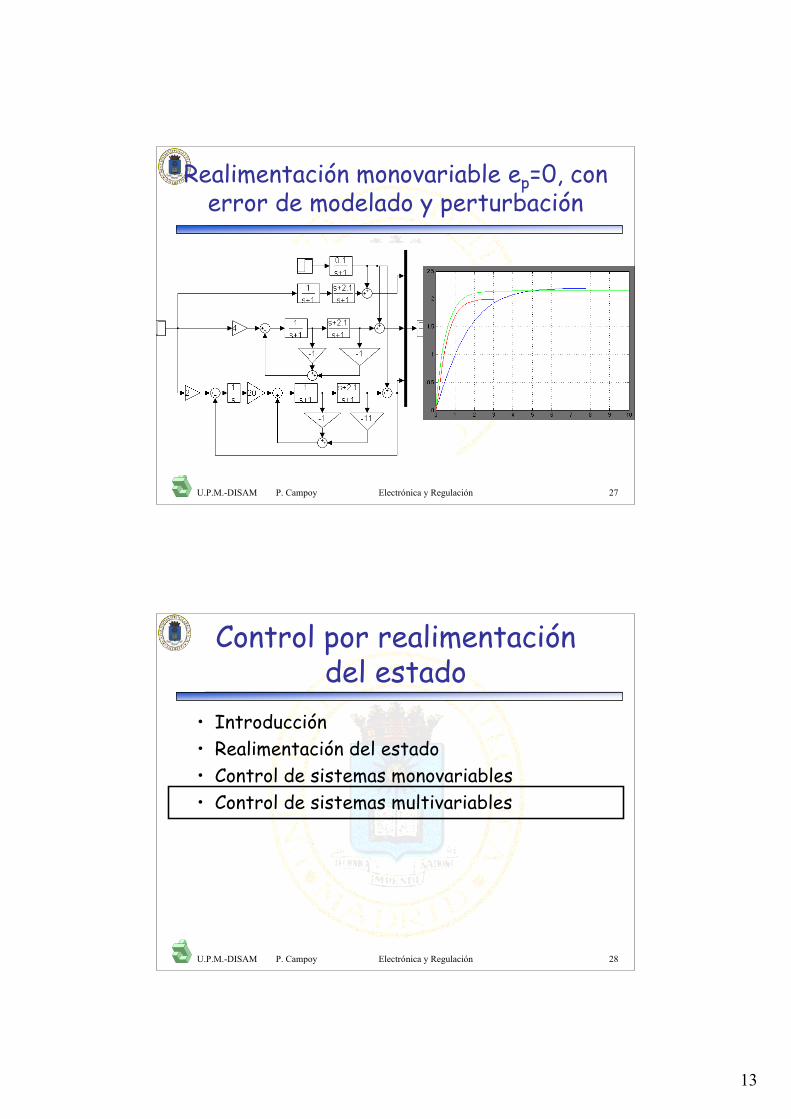
Realimentación monovariable ep=0, conerror de modelado y perturbación
U.P.M.-DISAM P. Campoy Electrónica y Regulación 28
Control por realimentacióndel estado
• Introducción• Realimentación del estado• Control de sistemas monovariables• Control de sistemas multivariables
14
U.P.M.-DISAM P. Campoy Electrónica y Regulación 29
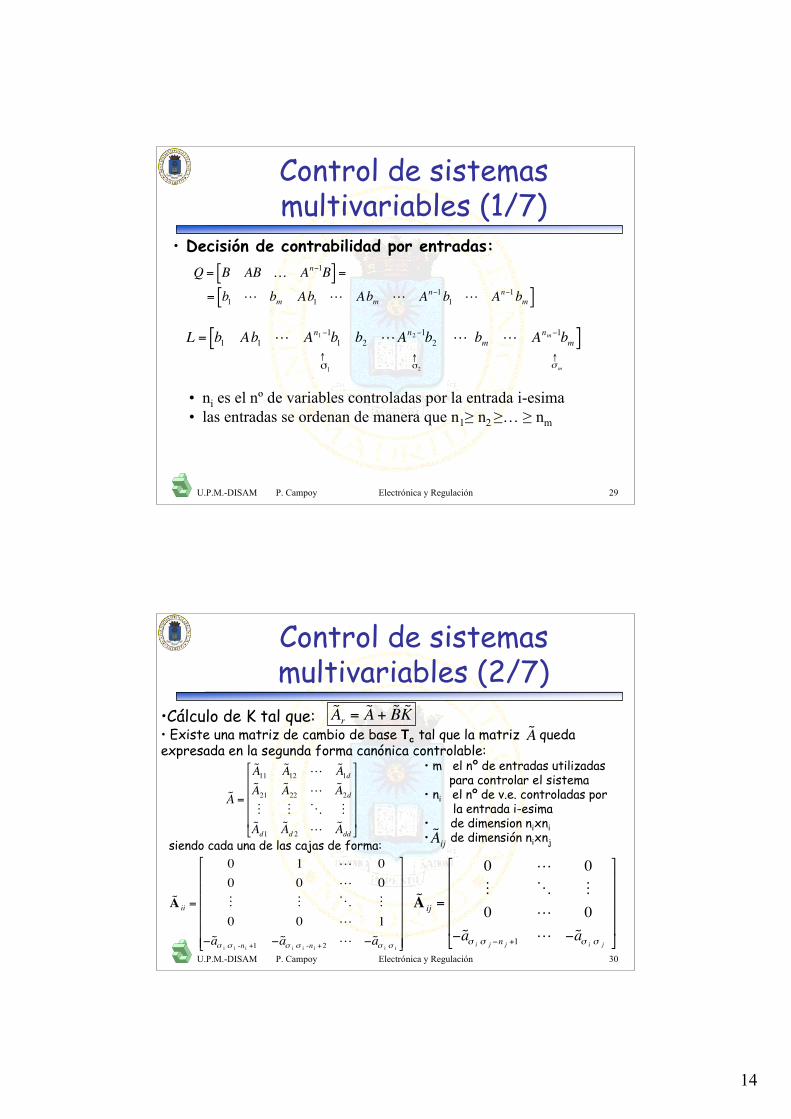
Control de sistemasmultivariables (1/7)
• Decisión de contrabilidad por entradas:
!
Q = B AB K An"1B[ ] = b
1L bm Ab
1L Abm L A
n"1b1
L An"1bm[ ]
!
L = b1
Ab1
L An1"1b1
b2
LAn2"1b2
L bm
L Anm"1bm[ ]
!
1! 2
!!
m!!
• ni es el nº de variables controladas por la entrada i-esima• las entradas se ordenan de manera que n1≥ n2 ≥… ≥ nm
!
Q = B AB K An"1B[ ] = b
1L bm Ab
1L Abm L A
n"1b1
L An"1bm[ ]
U.P.M.-DISAM P. Campoy Electrónica y Regulación 30
Control de sistemasmultivariables (2/7)
!
˜ A r
= ˜ A + ˜ B ˜ K
!
˜ A =
˜ A 11
˜ A 12
L ˜ A 1d
˜ A 21
˜ A 22
L ˜ A 2d
M M O M
˜ A d1
˜ A d 2
L ˜ A dd
"
#
$ $ $ $
%
&
' ' ' '
!
˜ A ij =
0 L 0
M O M
0 L 0
" ˜ a # i # j "n j +1L " ˜ a # i # j
$
%
& & & &
'
(
) ) ) )
!
˜ A ii
=
0 1 L 0
0 0 L 0
M M O M
0 0 L 1
" ˜ a #i#
i-n
i+1
" ˜ a #i#
i-n
i+2
L " ˜ a #i#
i
$
%
& & & & & &
'
(
) ) ) ) ) )
siendo cada una de las cajas de forma:
•Cálculo de K tal que:
• m el nº de entradas utilizadas para controlar el sistema• ni el nº de v.e. controladas por la entrada i-esima• de dimension nixni• de dimensión nixnj
• Existe una matriz de cambio de base Tc tal que la matriz quedaexpresada en la segunda forma canónica controlable:
!
˜ A
!
˜ A ij
15
U.P.M.-DISAM P. Campoy Electrónica y Regulación 31
Control de sistemasmultivariables (3/7)
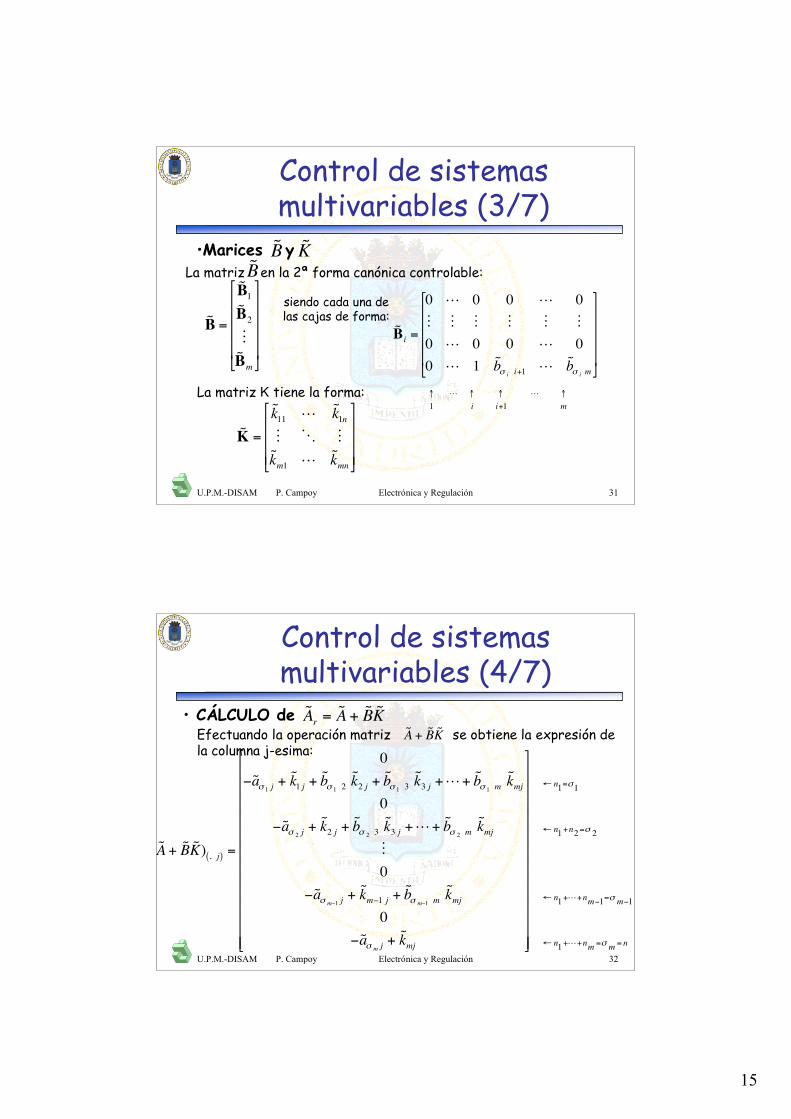
La matriz en la 2ª forma canónica controlable:
siendo cada una delas cajas de forma:
•Marices y
!
˜ B =
˜ B 1
˜ B 2
M
˜ B m
"
#
$ $ $ $
%
&
' ' ' '
!
˜ B i=
0 L 0 0 L 0
M M M M M M
0 L 0 0 L 0
0 L 1 ˜ b "i
i+1L ˜ b "
im
#
$
% % % %
&
'
( ( ( (
) L ) ) L )
1 i i+1 m
La matriz K tiene la forma:
!
˜ K =
˜ k 11
L ˜ k 1n
M O M
˜ k m1
L ˜ k mn
"
#
$ $ $
%
&
' ' '
!
˜ B
!
˜ K
!
˜ B
U.P.M.-DISAM P. Campoy Electrónica y Regulación 32
Control de sistemasmultivariables (4/7)
Efectuando la operación matriz se obtiene la expresión dela columna j-esima:
• CÁLCULO de
!
( ˜ A + ˜ B ˜ K ), j( ) =
0
" ˜ a # 1 j + ˜ k 1 j + ˜ b # 1 2
˜ k 2 j + ˜ b # 1 3
˜ k 3 j +L+ ˜ b # 1 m
˜ k mj
0
" ˜ a # 2 j + ˜ k 2 j + ˜ b # 2 3
˜ k 3 j +L+ ˜ b # 2 m
˜ k mj
M
0
" ˜ a # m"1 j + ˜ k m"1 j + ˜ b # m"1 m˜ k mj
0
" ˜ a # m j + ˜ k mj
$
%
& & & & & & & & & & & &
'
(
) ) ) ) ) ) ) ) ) ) ) )
* n1
=#1
* n1
+n2
=#2
* n1
+L+nm"1
=#m"1
* n1
+L+nm
=#m
= n
!
˜ A r
= ˜ A + ˜ B ˜ K
!
˜ A + ˜ B ˜ K
16
U.P.M.-DISAM P. Campoy Electrónica y Regulación 33
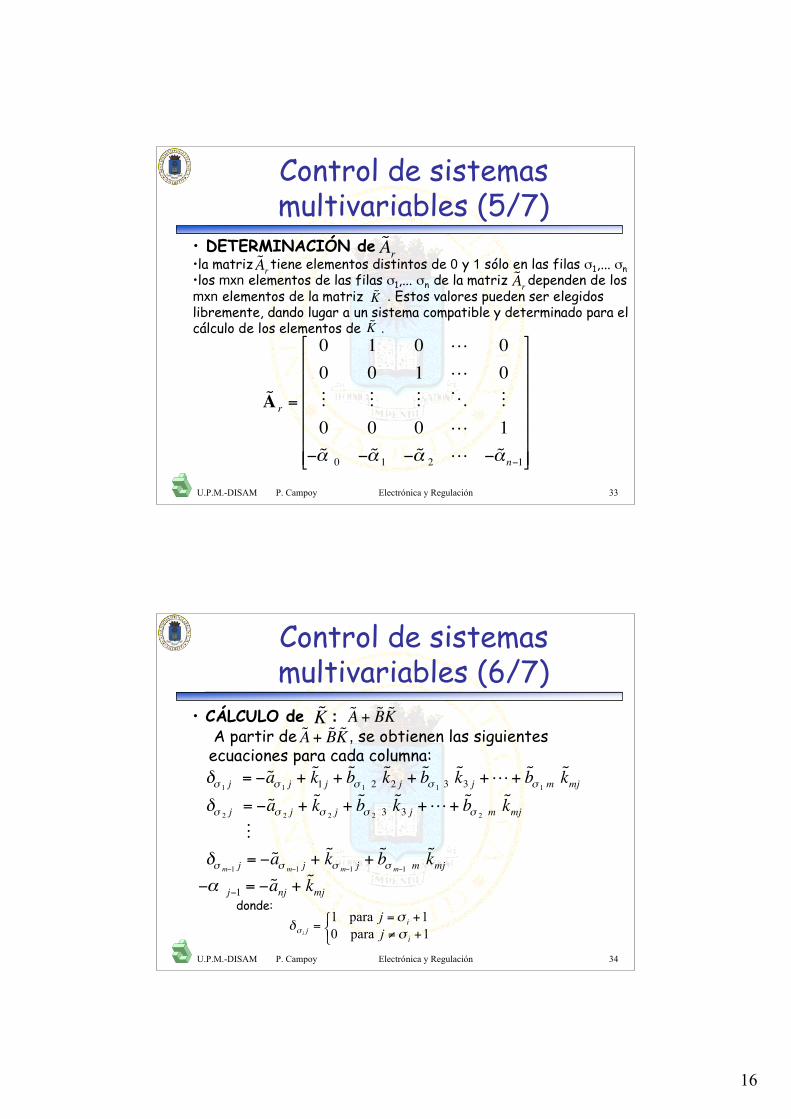
Control de sistemasmultivariables (5/7)
• DETERMINACIÓN de •la matriz tiene elementos distintos de 0 y 1 sólo en las filas σ1,... σn•los mxn elementos de las filas σ1,... σn de la matriz dependen de losmxn elementos de la matriz . Estos valores pueden ser elegidoslibremente, dando lugar a un sistema compatible y determinado para elcálculo de los elementos de .
!
˜ A r
=
0 1 0 L 0
0 0 1 L 0
M M M O M
0 0 0 L 1
" ˜ # 0
" ˜ # 1
" ˜ # 2
L " ˜ # n"1
$
%
& & & & & &
'
(
) ) ) ) ) )
!
˜ A r
!
˜ A r
!
˜ A r
!
˜ K
!
˜ K
U.P.M.-DISAM P. Campoy Electrónica y Regulación 34
Control de sistemasmultivariables (6/7)
• CÁLCULO de : A partir de , se obtienen las siguientesecuaciones para cada columna:
!
"#1
j = $ ˜ a #1
j + ˜ k 1 j + ˜ b #
12
˜ k 2 j + ˜ b #
13
˜ k 3 j +L+ ˜ b #
1m
˜ k mj
"#2
j = $ ˜ a #2
j + ˜ k #2
j + ˜ b #2
3
˜ k 3 j +L+ ˜ b #
2m
˜ k mj
M
"# m$1j = $ ˜ a # m$1
j + ˜ k # m$1j + ˜ b # m$1
m˜ k mj
$% j$1= $ ˜ a nj + ˜ k mj
donde:
!"#
+$+=
=1para0
1para1
i
ij j
ji %
%&%
!
˜ K
!
˜ A + ˜ B ˜ K
!
˜ A + ˜ B ˜ K
17
U.P.M.-DISAM P. Campoy Electrónica y Regulación 35
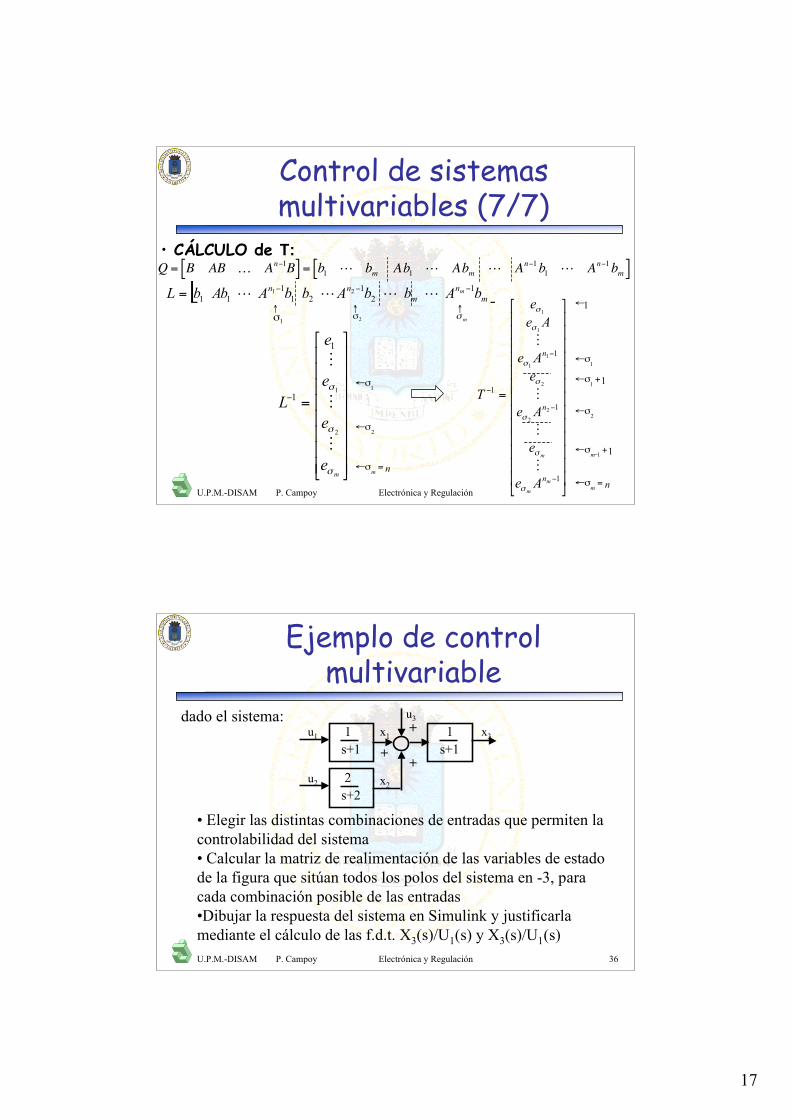
Control de sistemasmultivariables (7/7)
• CÁLCULO de T:
!
Q = B AB K An"1B[ ] = b
1L bm Ab
1L Abm L A
n"1b1
L An"1bm[ ]
[ ]m
n
m
nnbAbbAbbAbAbL m 1
2
1
21
1
11
21!!!= LLLL
!!!!!!!!
"
#
$$$$$$$$
%
&
='
m
e
e
e
e
L
(
(
(
M
M
M
2
1
1
1
!!!!!!!!!!!!!
"
#
$$$$$$$$$$$$$
%
&
=
'
'
'
'
1
1
1
1
2
2
2
1
1
1
1
m
m
m
n
n
n
Ae
e
Ae
e
Ae
Ae
e
T
(
(
(
(
(
(
(
M
M
M
M
!
1! 2
!!
m!!
nm=σ←
←1
m+σ← − 11
σ←2
+σ← 11
σ←1
σ←1
σ←2
nm=σ←
U.P.M.-DISAM P. Campoy Electrónica y Regulación 36
Ejemplo de controlmultivariable
u1 1s+1
1s+1
x3
++
u2 2s+2
x1
x2
u3+
• Elegir las distintas combinaciones de entradas que permiten lacontrolabilidad del sistema• Calcular la matriz de realimentación de las variables de estadode la figura que sitúan todos los polos del sistema en -3, paracada combinación posible de las entradas•Dibujar la respuesta del sistema en Simulink y justificarlamediante el cálculo de las f.d.t. X3(s)/U1(s) y X3(s)/U1(s)
dado el sistema:
18
U.P.M.-DISAM P. Campoy Electrónica y Regulación 37
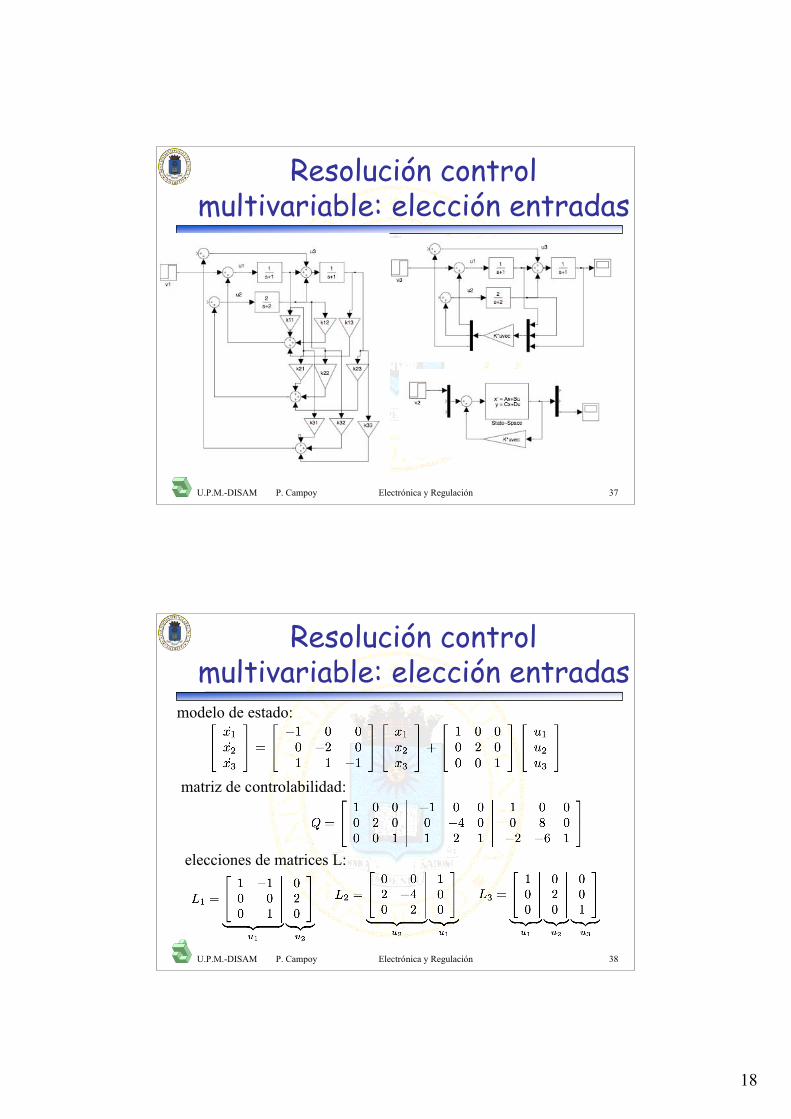
Resolución controlmultivariable: elección entradas
U.P.M.-DISAM P. Campoy Electrónica y Regulación 38
Resolución controlmultivariable: elección entradas
modelo de estado:
matriz de controlabilidad:
elecciones de matrices L:
19
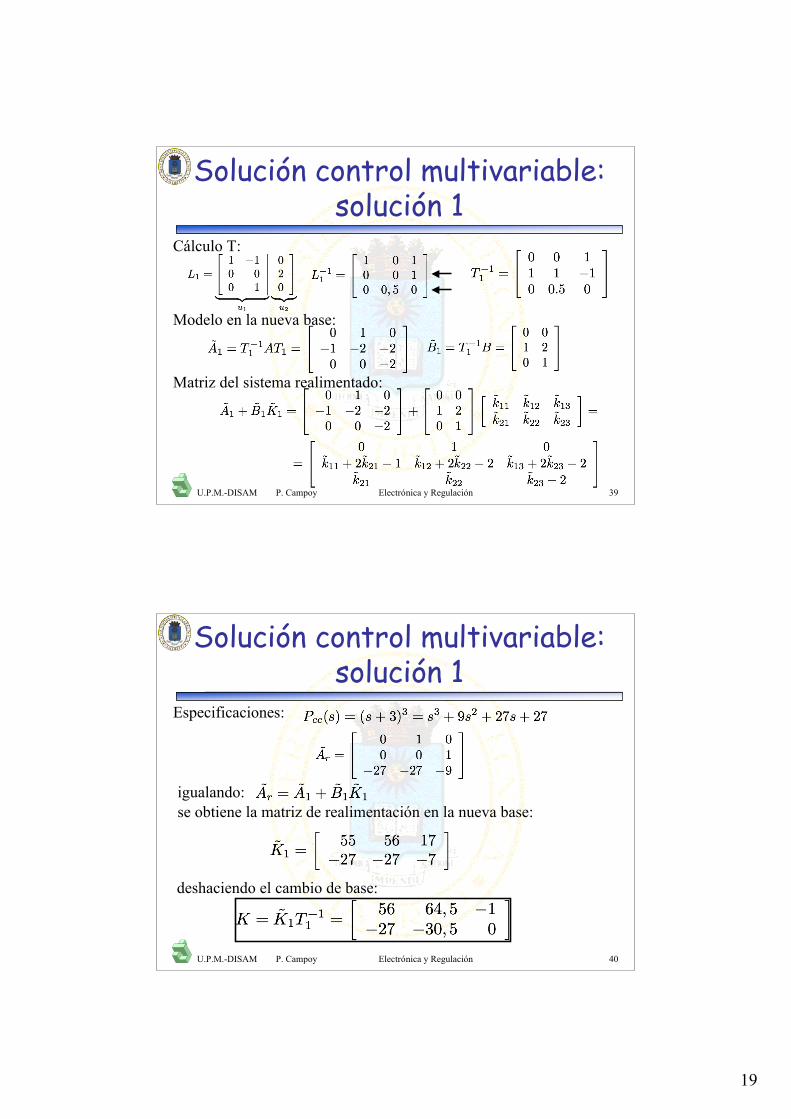
U.P.M.-DISAM P. Campoy Electrónica y Regulación 39
Solución control multivariable:solución 1
Cálculo T:
Matriz del sistema realimentado:
Modelo en la nueva base:
U.P.M.-DISAM P. Campoy Electrónica y Regulación 40
Solución control multivariable:solución 1
Especificaciones:
igualando:se obtiene la matriz de realimentación en la nueva base:
deshaciendo el cambio de base:
20
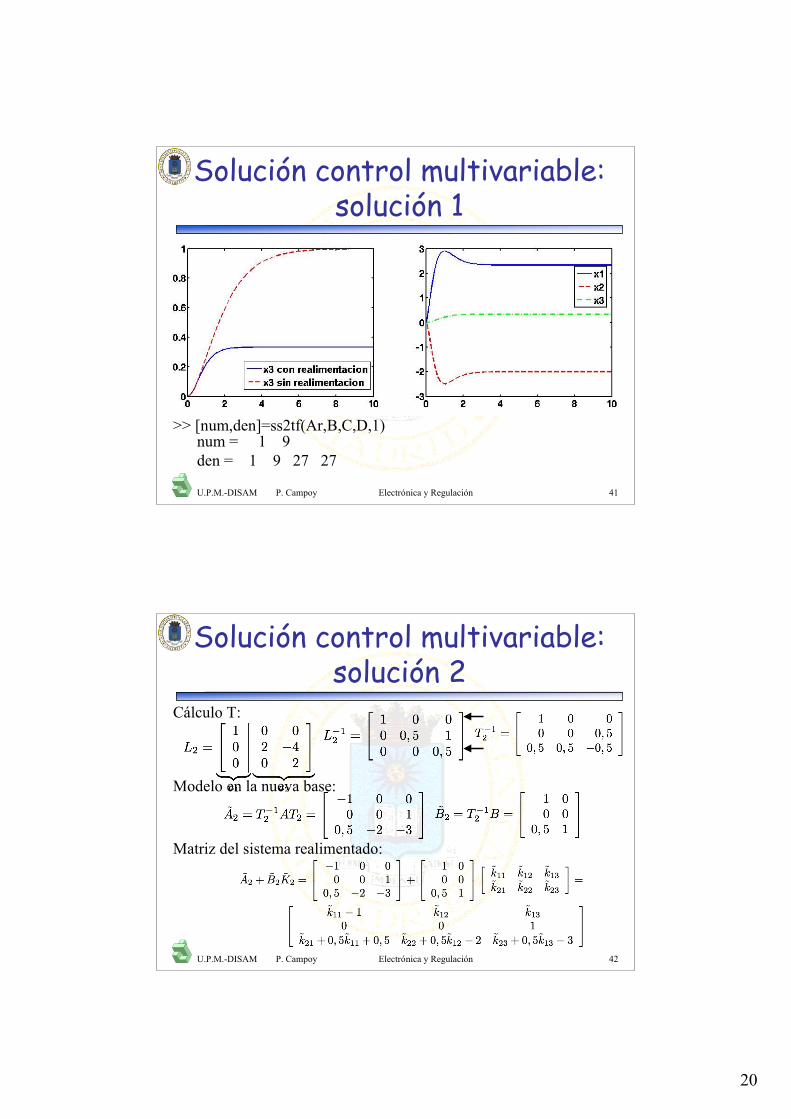
U.P.M.-DISAM P. Campoy Electrónica y Regulación 41
Solución control multivariable:solución 1
>> [num,den]=ss2tf(Ar,B,C,D,1)num = 1 9den = 1 9 27 27
U.P.M.-DISAM P. Campoy Electrónica y Regulación 42
Solución control multivariable:solución 2
Cálculo T:
Modelo en la nueva base:
Matriz del sistema realimentado:
21
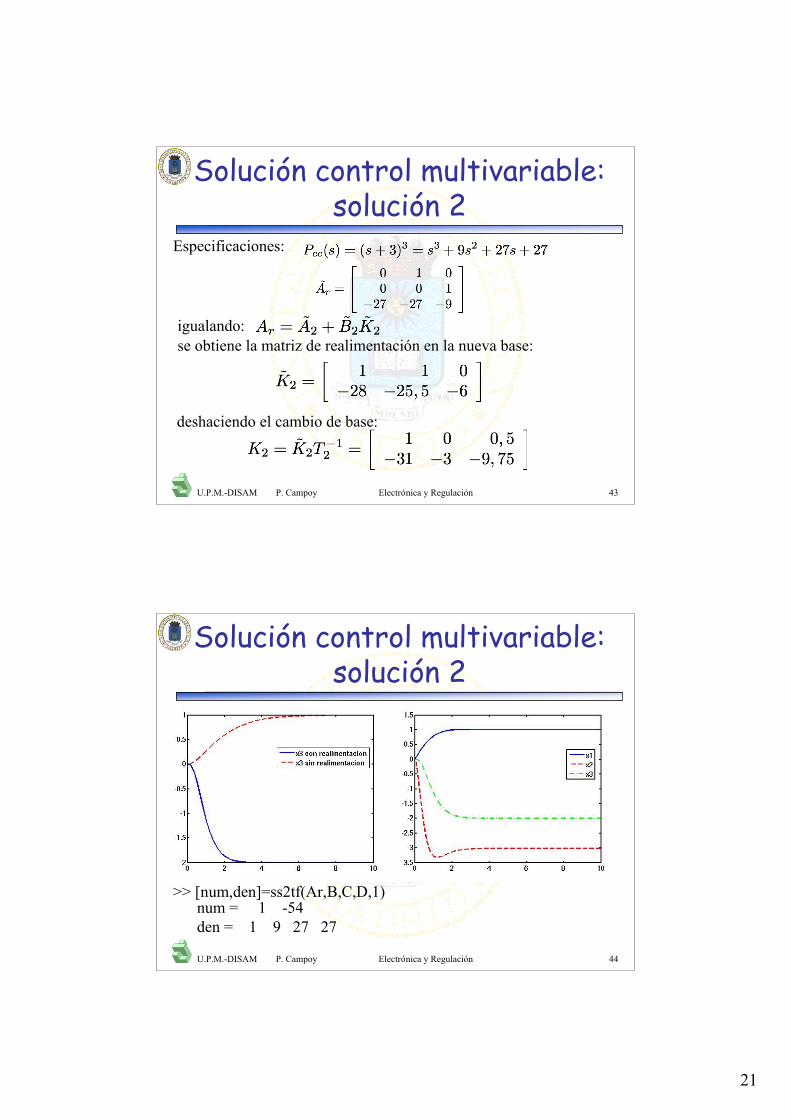
U.P.M.-DISAM P. Campoy Electrónica y Regulación 43
Solución control multivariable:solución 2
Especificaciones:
deshaciendo el cambio de base:
igualando:se obtiene la matriz de realimentación en la nueva base:
U.P.M.-DISAM P. Campoy Electrónica y Regulación 44
Solución control multivariable:solución 2
>> [num,den]=ss2tf(Ar,B,C,D,1)num = 1 -54den = 1 9 27 27
22
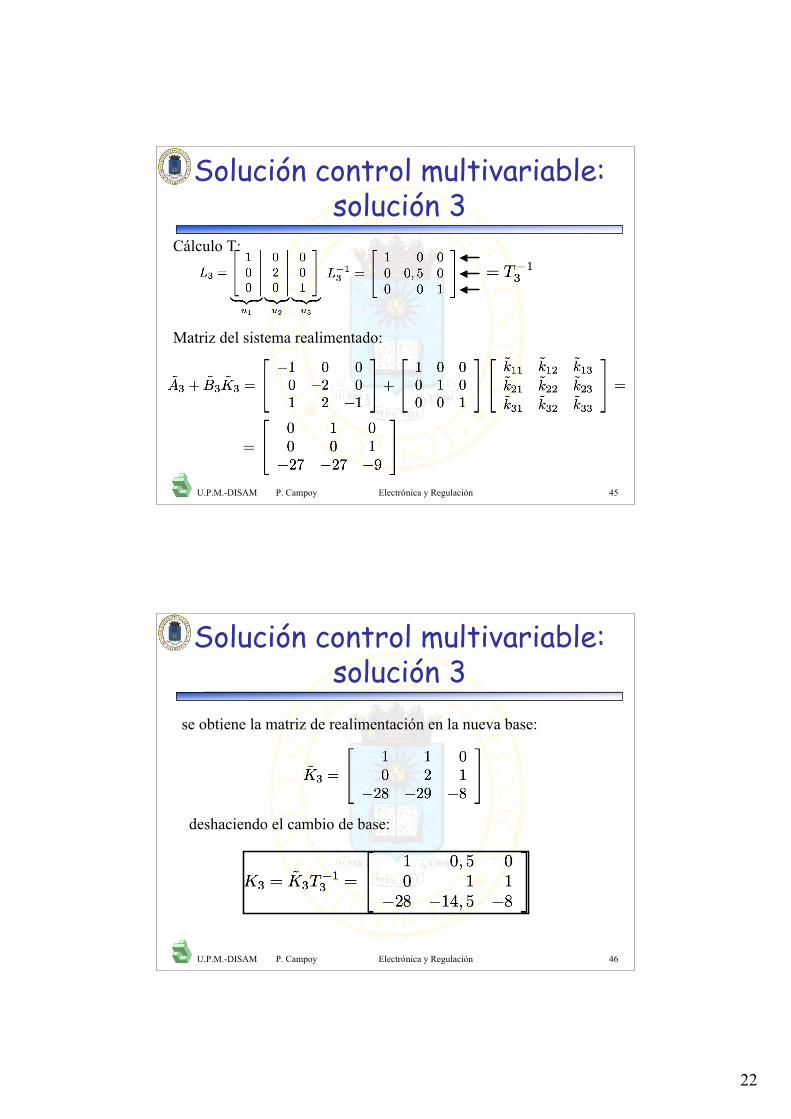
U.P.M.-DISAM P. Campoy Electrónica y Regulación 45
Solución control multivariable:solución 3
Cálculo T:
Matriz del sistema realimentado:
U.P.M.-DISAM P. Campoy Electrónica y Regulación 46
Solución control multivariable:solución 3
se obtiene la matriz de realimentación en la nueva base:
deshaciendo el cambio de base:
23
U.P.M.-DISAM P. Campoy Electrónica y Regulación 47
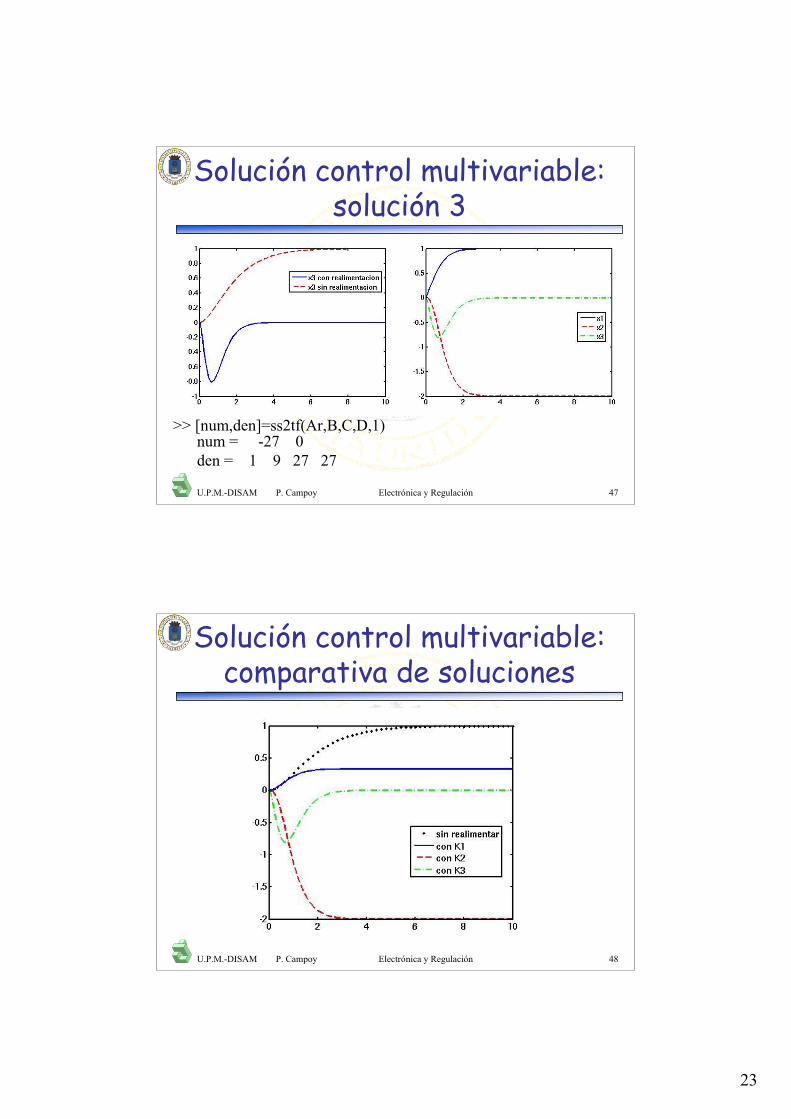
Solución control multivariable:solución 3
>> [num,den]=ss2tf(Ar,B,C,D,1)num = -27 0den = 1 9 27 27
U.P.M.-DISAM P. Campoy Electrónica y Regulación 48
Solución control multivariable:comparativa de soluciones
24
U.P.M.-DISAM P. Campoy Electrónica y Regulación 49
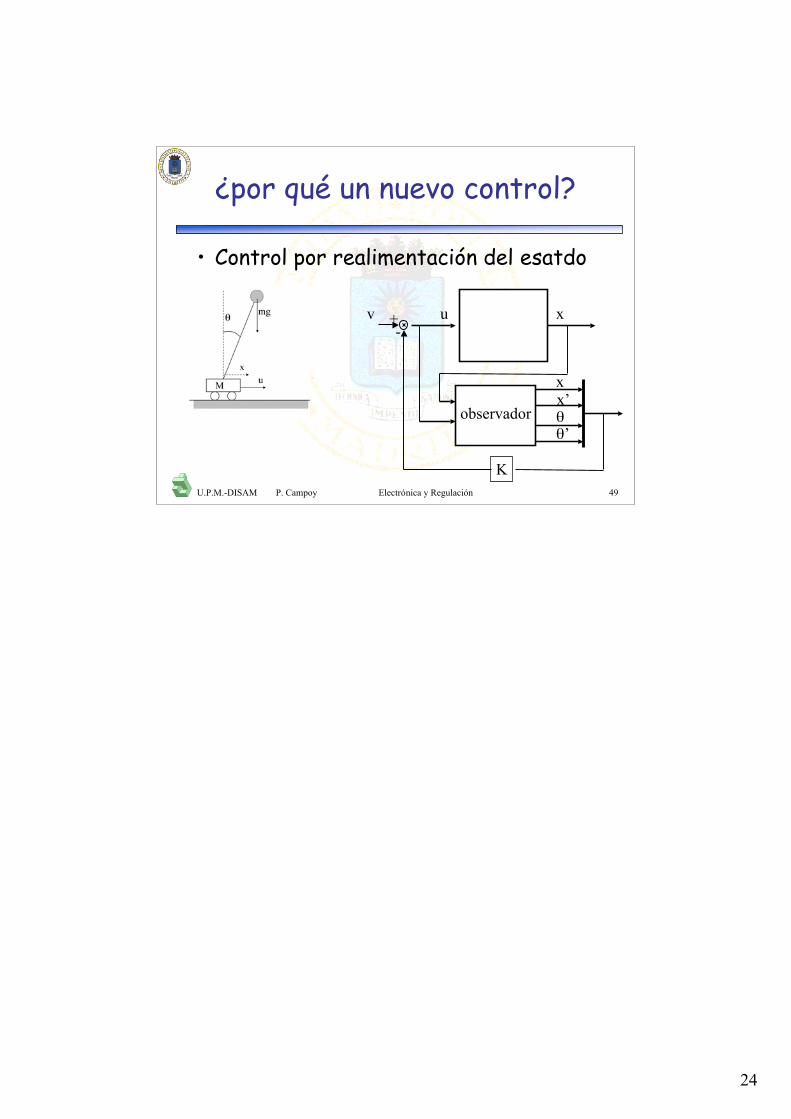
¿por qué un nuevo control?
• Control por realimentación del esatdo
θ
u x
x’
θ’
-+v
K
x
observador