2. Das Differenzenverfahren - uni-magdeburg.de 2.pdf · Simpsonsche Regel verwendet (quadratische...
26
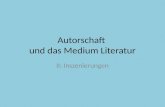
2.1. Einführung 13 2. Das Differenzenverfahren 2.1. Einführung Mit dem Differenzenverfahren lassen sich Probleme lösen, die durch Differenti- algleichungen beschrieben werden. Dazu wird das Lösungsgebiet diskretisiert (siehe Bild 2.1-1), d.h. das Gebiet wird mit einem Gitternetz überzogen, das häufig eine kon- stante Maschenweite aufweist. 1 An jedem Punkt, der durch die Diskretisierung ent- standen ist (Stützstellen), werden die Ableitungen durch Differenzenquotienten ersetzt. a) b) Bild 2. 1-1: Diskretisierung eines Gebietes D, a) eindimensionales Gebiet, b) zweidimensionales Gebiet Das kontinuierliche Problem – Lösung einer Differentialgleichung – wird durch das Differenzenverfahren in ein diskretes Problem – z.B. die Lösung eines Glei- chungssystems – überführt. Das Gleichungssystem ist linear, wenn die Randwertauf- gabe linear ist. Auf solche linearen Randwertaufgaben wollen wir uns im Folgenden beschränken. Auf der Basis des Differenzenverfahrens lassen sich für eine gegebene Aufgabe häufig schnell und mit geringem Aufwand Näherungslösungen ermitteln, die oft auch bei grober Diskretisierung noch ausreichend genaue Ergebnisse liefern. Auf die Vor- und Nachteile des Differenzenverfahrens im Vergleich zu anderen numerischen Verfahren, wie z.B. der Finite-Elemente-Methode, wird zu einem späte- ren Zeitpunkt genauer eingegangen. Die nachfolgenden Argumente sind daher ledig- lich als eine erste Orientierung zu verstehen. 1 Es gibt natürlich sehr viele Varianten von Gitternetzen (siehe dazu beispielsweise: Panow, D.J.: Formelsamm- lung zur numerischen Behandlung partieller Differentialgleichungen nach dem Differenzenverfahren. Akadenie Verlag, Berlin 1955. D D
Transcript of 2. Das Differenzenverfahren - uni-magdeburg.de 2.pdf · Simpsonsche Regel verwendet (quadratische...

2.1. Einführung 13
2. Das Differenzenverfahren 2.1. Einführung
Mit dem Differenzenverfahren lassen sich Probleme lösen, die durch Differenti-algleichungen beschrieben werden. Dazu wird das Lösungsgebiet diskretisiert (siehe Bild 2.1-1), d.h. das Gebiet wird mit einem Gitternetz überzogen, das häufig eine kon-stante Maschenweite aufweist.1 An jedem Punkt, der durch die Diskretisierung ent-standen ist (Stützstellen), werden die Ableitungen durch Differenzenquotienten ersetzt.
a) b)
Bild 2. 1-1: Diskretisierung eines Gebietes D, a) eindimensionales Gebiet, b) zweidimensionales Gebiet
Das kontinuierliche Problem – Lösung einer Differentialgleichung – wird durch
das Differenzenverfahren in ein diskretes Problem – z.B. die Lösung eines Glei-chungssystems – überführt. Das Gleichungssystem ist linear, wenn die Randwertauf-gabe linear ist. Auf solche linearen Randwertaufgaben wollen wir uns im Folgenden beschränken.
Auf der Basis des Differenzenverfahrens lassen sich für eine gegebene Aufgabe häufig schnell und mit geringem Aufwand Näherungslösungen ermitteln, die oft auch bei grober Diskretisierung noch ausreichend genaue Ergebnisse liefern.
Auf die Vor- und Nachteile des Differenzenverfahrens im Vergleich zu anderen numerischen Verfahren, wie z.B. der Finite-Elemente-Methode, wird zu einem späte-ren Zeitpunkt genauer eingegangen. Die nachfolgenden Argumente sind daher ledig-lich als eine erste Orientierung zu verstehen.
1 Es gibt natürlich sehr viele Varianten von Gitternetzen (siehe dazu beispielsweise: Panow, D.J.: Formelsamm-lung zur numerischen Behandlung partieller Differentialgleichungen nach dem Differenzenverfahren. Akadenie Verlag, Berlin 1955.
D
D

14 2. Das Differenzenverfahren
Vorteile: • Die Differenzengleichungen lassen sich in der Regel und bei nicht zu hohen Anforde-
rungen an die Qualität der Lösung) einfach aufstellen; es ist kein großer Programmier-aufwand erforderlich; der Gesamtaufwand ist gering.
• Das Differenzenverfahren ist historisch wesentlich älter als beispielsweise die Finite-Element-Methode, so dass für nahezu alle Probleme ausreichend mathematische Litera-tur zur Verfügung steht.
• Für viele physikalische Probleme, z.B. auf dem Gebiet der Strömungsmechanik, hat sich das Differenzenverfahren bewährt, und es gibt eine Reihe kommerzieller Pro-gramme, die auf dieser Methode und seinen Erweiterungen basieren.
Nachteile: • Es gibt Schwierigkeiten bei der Behandlung komplizierter Randwertaufgaben, die z.B.
durch irreguläre geometrische Ränder, zeit- und räumlich veränderliche Parameter u.ä. charakterisiert sind.
• Die entstehenden Gleichungssysteme sind oft schlecht konditioniert, so dass die Lösung großer Systeme auf Schwierigkeiten stößt.
• Die Entwicklung universeller Programmsysteme, mit denen große Klassen von Proble-men gelöst werden können, stößt auf vielfältige Schwierigkeiten, die die Methoden- und Softwareentwicklung erschweren.
2.2. Ableitung einfacher Differenzenformeln Zur Vorbereitung auf die Lösung einer Vielzahl von praktischen Problemen mit dem Differenzenverfahren werden nachfolgend die benötigten Differenzenformeln abgelei-tet und übersichtlich zusammengestellt. Eindimensionale Probleme Das Lösungsgebiet wird äquidistant aufgeteilt, die Stützstellenabstände betragen h.
Bild 2.2-1: Diskretisierung eines eindimensionalen Gebietes
x
h h h h
ψ
ψ i−1 ψ i ψ i+1
( )ψ x
ψ i−2 ψ i+2

2.2. Ableitung wichtiger Differenzenformeln 15 Die zu berechnende Funktion wird der Allgemeingültigkeit wegen mit ( )xψ bezeich-net. Die Funktion ( )xψ kann beispielsweise die Verschiebung (Biegelinie) eines Bal-kens, die Temperatur in einem Körper oder eine beliebige andere physikalische Feld-größe sein. Mit der mathematischen Definition der ersten Ableitung
( ) ( )
hxhx
xx xx
ψ−+ψ=
∆ψ∆
=ψ′=∂∂ψ
→∆→∆ 00limlim (2.2-1)
lässt sich die erste Ableitung unter Verwendung der Funktionswerte an den Gitter-punkten (siehe Bild 2.2-1) ausdrücken. Dazu gibt es mehrere Möglichkeiten. Für die erste Ableitung unterscheiden wir zwischen Vorwärts- und Rückwärtsdifferenzenfor-meln sowie der zentralen Differenzenformel.
Vorwärtsdifferenzen: hx
ii
ii
ψ−ψ=
∆ψ∆
=ψ′ +1 (2.2-2a)
Rückwärtdifferenzen: hx
ii
ii
1−ψ−ψ=
∆ψ∆
=ψ′ (2.2-2b)
Zentrale Differenzen: hx
ii
ii 2
11 −+ ψ−ψ=
∆ψ∆
=ψ′ (2.2-2c)
Die zentrale Differenzenformel hat einen symmetrischen Aufbau bezüglich des Punk-tes i, woraus sich Vorteile bei der Anwendung ergeben.2 Durch mehrfache Anwen-dung einer Differenzenformel für die erste Ableitung lassen sich Differenzenformeln für höhere Ableitungen gewinnen. Die Anwendung der zentralen Differenzenformel ergibt beispielsweise für die zweite Ableitung das folgende Ergebnis:
∆
ψ∆−
∆
ψ∆=
ψ−ψ
∆∆
=
∆ψ∆
∆∆
=
∆
ψ∆=ψ ′′=
∂
ψ∂
−+
−+
xxh
hxxxxx
ii
ii
ii
i
i
21
21
21
21
1
2
2
2
2
Wendet man auf die Ableitungen xi
∆
ψ∆+
21
und xi
∆
ψ∆−
21
wiederum die zentrale Differen-
zenformel an, so ergibt sich
( )112 21
+− ψ+ψ−ψ=ψ ′′ iiii h (2.2.-3)
Auf die gleiche Art und Weise lassen sich zentrale Differenzenformeln mit einem symmetrischen Aufbau bezüglich des Bezugspunktes i für höhere Ableitungen ge-winnen. So ergibt sich für die dritte Ableitung:
2 Außerdem kann man zeigen, dass der Fehler der zentralen Differenzenformel die Größenordnung )( 2hO hat, während der Fehler der Vorwärts- und der Rückwärtsdiffenrenzenformeln nur die Größenordnung )(hO hat.

16 2. Das Differenzenverfahren
( )2112322
21
++−− ψ+ψ−ψ+ψ−=ψ ′′′ iiiii h (2.2.-4)
Für die vierte Ableitung erhält man analog
( )21124 4641
++−− +−+−=′′′′ iiiiii hψψψψψψ (2.2-5)
Häufig wird zur Ermittlung bestimmter physikalischer Größen der Wert des bestimm-ten Integrals ∫ψ
)(D
dx über ein Lösungsgebiet D benötigt. Wenn man unter Nutzung der
drei Stützstellen 1+i1 und, ψψψ ii− in dem Intervall ],[ 11 +− ii xx (vergleiche Bild 2.2.-1) die Simpsonsche Regel verwendet (quadratische Approximation der Funktion), ergibt sich für das Integral das folgende Ergebnis:
( )11 43
1
1
+− ψ+ψ+ψ=ψ∫+
−
iii
x
x
hdx
i
i
(2.2-6)
Natürlich lassen sich analog auch Integrationsformeln höherer (oder niedrigerer) Ord-nung, in die mehr (oder weniger) Stützstellen eingehen, ableiten. Für die einfache Anwendung der Differenzenformel wird gern die nachfolgend ange-gebene symbolische Schreibweise benutzt.
ix
∂∂ψ
h21
=
1 0 1
i-1 i i+1
( )20 h+ψ
ix
∂
ψ∂2
2
2
1h
=
1 -2 1
i-1 i i+1
( )20 h+ψ
ix
∂
ψ∂3
3
321h
=
-1 +2 0 -2 1
i-2 i-1 i i+1 i+2
( )20 h+ψ
ix
∂
ψ∂4
4
4
1h
=
1 -4 6 -4 1
i-2 i-1 i i+1 i+2
( )20 h+ψ
∫+
−
ψ1
1
i
i
x
x
dx
=h3
1 4 1
i-1 i i+1
( )50 h+ψ

2.2. Ableitung wichtiger Differenzenformeln 17 Zweidimensionale Probleme Für die Ableitungen nehmen wir an, dass das Gebiet mit einem Rechteckgitter überzo-gen ist (siehe Bild 2.2-2).
Bild 2.2-2: Diskretisierung eines zweidimensionalen Gebietes Die Stützweite in x-Richtung ist h und in y-Richtung k. Für χ = 1, d.h. h=k vereinfa-chen sich die Differenzenformeln. Für die Ableitungen
...,,, 2
2
2
2
yxyx ∂ψ∂
∂ψ∂
∂∂ψ
∂∂ψ
können die oben angegebenen eindimensionalen Formeln verwendet werden. Für eini-ge häufig in partiellen Differentialgleichungen auftretende gemischte Ableitungen werden nachfolgend Differenzenformeln abgeleitet.
( )
( )1,11,11,11,12
1,11,11,11,11,1,
,
2
4
41
2
−−+++−++
−−+++−++−+
+−−=
+−−=
−
∆∆
=
jijijiji
jijijijijiji
ji
h
hkkxyx
ψψψψχ
ψψψψψψ
∂∂ψ∂
(2.2-7)
( )
( )1,11,1,1,1,,11,11,1,12
2
1,11,1,1,1,,11,11,1,122
21,,1,
2
2
,22
4
22422
224221
2
++++−+−−+−−−
++++−+−−+−−−
+−
+−+−+−+=
+−+−+−+=
+−∆∆
=
jijijijijijijijiji
jijijijijijijijiji
jijiji
ji
h
kh
kxyx
ψψψψψψψψψχ
ψψψψψψψψψ
ψψψ∂∂ψ∂
(2.2-8)
h h h h h h h
k
k
k Pi-2,j Pi-1,j Pi,
Pi,j+
Pi+1,j
Pi,j-1
x
y
kh
=χ

18 2. Das Differenzenverfahren
( )1,11,1,1,11,11,13
2
21,,1,
,2
3
222
2
+−++−+−−−+
+−
−++−−=
+−
∆∆
=
jijijijijiji
jijiji
ji
h
kxyx
ψψψψψψχ
ψψψ
∂∂ψ∂
(2.2-9)
( )
∂ ψ∂ ∂
ψ ψ
χψ ψ ψ ψ ψ ψ
3
2
2
21 1
3 1 1 1 1 1 1 1 1 1 1
2
22 2
x y x k
h
i j
i j i j
i j i j i j i j i j i j
=
−
= − + − + −
+ −
− + + + + − − + − +
,
, ,
, , , , , ,
∆∆
(2.2.-10)
Damit lassen sich alle nachfolgend auftretenden Differentialoperatoren in Differenzen-operatoren überführen. Aus Gründen der Anschaulichkeit ist es auch hier zweckmäßig, eine symbolische Darstellung der Differenzenformeln zu benutzen.
Bild 2.2-3: Rechtecknetz mit unterschiedlicher Stützweite
( )20 h+ψ ( )22
2
2
2
,2 1
hyxji =
+=∇
∂ψ∂
∂ψ∂
ψ
2,
2
4hyxji
χ∂∂ψ∂
==
( )44
4
22
4
4
4
,4 1
2hyyxxji =
++=∇
∂ψ∂
∂∂ψ∂
∂ψ∂
ψ
h
k
x
y
κ =hk
-1 1 0
1 -1
0 0
0
0 ( )ψ + 0 2h
( )20 h+ψ1 1
κ4
κ4
2κ2 2κ2
2κ2
2κ2
−4κ2(1+κ2)
−4κ2(i+κ2)
−4(1+κ2) −4(1+κ2)
(6+8κ2+6κ4)
1 1
κ2
κ2
−2(1+κ2)

2.2. Ableitung wichtiger Differenzenformeln 19
4
2
,22
4
hyxji
χ∂∂ψ∂
=
∫∫ =χ
ψ9
2hdxdy
3
2
,2
3
2hyxji
χ∂∂ψ∂
=
3,
2
3
2hyx ji
χ∂∂ψ∂
=
ψ
1 1
-2
-1
-1
2
ψ
1 1
-2
1
1
-2
-2
-4
( )ψ + 0 2h
1
1
1
1
4
4
4
4
16
ψ
-1
-1
1
1
2
-2

20 2. Das Differenzenverfahren
2.3. Dgl. der Biegelinie und Randbedingungen des geraden Balkens Differentialgleichung der Biegelinie
Bild 2.3-1: Positive Schnittgrößendefinition
1. ( ) ( )xqdx
vdxEI
dxd
=
2
2
2
2
(2.3-1)
2. ( ) vx ′=ϕ (2.3-2)
3. ( ) 2
2
dxvd
EIxM −= (3.3-3)
4. ( ) ( )
−= 2
2
dxvd
xEIdxd
xFQ (2.3-4)
Randbedingungen
5. EIM
v
v
−=′′
= 0 (2.3-5)
6. 00
=′=
vv
(2.3-6)
7. ( )
EIM
v
FvEI
−=′′
−=′′′ (2.3-7)
8. ( )
vEIc
v
vEIc
v
T
′′=′
′′′−=
1
1
(2.3-8)
M M
FQ FQ
q
x
y, v
M
M
F
cT
c

2.4. Differenzenformeln für Dgl. der Biegelinie 21 Übergangsbedingungen
9. ( ) ( )00
=′−′′++′′−=′′′−−+′′′
++−−
++−−
vcvEIMvEIvEIcvFvEI
T
(2.3-9)
10. 0=′′v (siehe Fußnote 3 ) (2.3-10) Mit Hilfe der im Abschnitt 1 abgeleiteten Differenzenformeln lassen sich alle Bezie-hungen durch Differenzenausdrücke ersetzen. 2.4. Differenzenformeln für die Dgl. der Biegelienie Für konstant EI kann die unter Gleichung (2.2-5) angegebene Formel benutzt werden. Für veränderliches Trägheitsmoment wird nachfolgend eine Differenzenformel herge-leitet.
( )
( ) ( ) ( ){ }
( ) ( ) ( ){ } iiiiiiiiiiiiiii
iiiiiiiiiiii
iii
qvIvIIvIIIvIIvIhE
vvvEIvvvEIvvvEIh
vvvhEI
xxv
EIx
=++−++++−=
+−++−−+−=
+−
∆∆
=
∆∆
∆∆
+++++−−−−−
+−++−−−−
+−
21111111214
111111214
1122
2
2
2
2
2
242
22221
2
1. ( ) ( ) ( )I v I I v I I I v I I v I vq h
Ei i i i i i i i i i i i i ii
− − − − − + + + + +− + + + + − + + =1 2 1 1 1 1 1 1 1 2
4
2 4 2 (2.4-1)
2. Biegewinkel ϕ ii iv v
h=
−+ −1 1
2 (2.4-2)
3. Moment ( )MEIh
v v vii
i i i= − − +− +2 1 12 (2.4-3)
4. Querkraft ( )[ ]FEh
I v I v I I v I v I vQ i i i i i i i i i i i i= − + − + −− − − − − + + + + +22 23 1 2 1 1 1 1 1 1 1 2 (2.4-4)
3 Als Alternative kann das Trägheitsmoment in einem Abschnitt um das Gelenk Null gesetzt werden.
c
cT M
F
- +

22 2. Das Differenzenverfahren
Beachte: In die Differentialgleichungen für Randpunkte gehen Trägheitsmomente I für Punkte außerhalb des eigentlichen Lösungsgebietes ein. In diesem Fall kann man den Verlauf des Tragheitsmomentes I(x) über den Rand hinaus fortsetzen und den sich da-durch ergebenden fiktiven Wert für I an dem entsprechenden Außenpunkt einsetzen. 2.5. Differenzenformeln für Rand- und Übergangsbedingungen Randbedingungen Für alle Rand- und Übergangsbedingungen müssen jeweils gesonderte Differenze-napproximationen hergeleitet werden. Im Folgenden wird ein allgemeiner Fall behan-delt (siehe Bild 2.3-1), der das prinzipielle Vorgehen verdeutlichen soll.
Bild 2.5-1: Randbedingungen am linken Rand eines Balkens Es ergeben sich zwei Gleichungen für die Elimination der Außenpunkte -2 und -1: Momentenbedingung:
02
122
12
10
010
=−
−−+
+− − EI
Mhv
EIhc
vvEI
hc TT (2.5-1)
Querkraftbedingung:
022
220
3
0
3
20
11
0
10
0
111
0
12
0
1 =+−−+−
+− +−−
−−
−
EIFh
EIch
vII
vII
vI
IIv
II
vII ii
( )
02
22
20
3
20
11
0
10
0
311
10
12
0
1 =−+−
−−−+− +−
−−
−−
EIFh
vII
vII
vEI
chIIEv
II
vII ii (2.5-2)
Mit diesem Ergebnis ergibt sich beispielsweise für die Randbedingungen nach Glei-chung (2.3-5) mit konstant ,0,0, 0 ====∞= IIFcc kT aus der Formeln (2.5-2)
v0 0= , und aus (2.5-1) folgt dann v vMhEI1 1
2
= − −− . Analog lassen sich auch andere
Fälle herleiten.
x -2 -1 1 2
y, v
M
F
cT
c

2.5. Differenzenformeln für Rand- und Übergangsbedingungen 23 Übergangsbedingungen Wir betrachten zunächst den Fall, dass die Lasten und Lagerungsbedingungen zwi-schen den Punkten i und i+1 liegen (siehe Bild 2.5-2)
Bild 2.5-2: Schnittgrößen an der Übergangsstelle zwischen den Punkten i und i+1 Es wird zur Vereinfachung der Betrachtung eine konstante Biegesteifigkeit I=konstant angenommen. Der Träger wird zwischen den Punkten i und i+1 zerschnitten. Die sich ergebenden beiden Teile sind im Bild 2.5-3 dargestellt.
Bild 2.5-3: Die beiden Trägerhälften (Schnittpunkt ist durch × gekennzeichnet) Auf beide Trägerseiten wird auf die Punkte i-1, i, i+1 und i+2 der Differenzenoperator Gleichung . (2.4-1) angewendet (beachte I=konstant). Es ergibt sich folgende Tabelle:
i-1 i i+1 i+2 1 2 -1 -2 6 -4 0 0 1 0 0 0 -4 6 0 0 -4 1 0 0 0 0 6 -4 0 0 -4 1 0 0 -4 6 0 0 -1 0
i-1 i i+1 i+2
F
M cT
c
M
Mr Ml
FQl FQr
cv
F
cTv’
i-1 i 1 2
-2 -1 i+1 i+2
linker Teil des Trägers
rechter Teil des Trägers

24 2. Das Differenzenverfahren
Die vier Außenpunkte 1, 2, -1, -2 lassen sich durch insgesamt vier Übergangsbedin-gungen eliminiert. Wir fordern zunächst die Gleichheit der Verschiebungen und der ersten Ableitung links und rechts vom Schnittpunkt und erhalten:
+=+→−
=−
→′
=′
+−=−→+
=+
→=
+−−+
+−−+
111111**
111111**
22
iiii
rl
iiii
rl
vvvvh
vvh
vvvv
vvvvvvvv
vv
i
i
vvvv
==
−
+
1
11 (2.5-3)
Die beiden übrigen Unbekannten (Verschiebungen an den Stellen 2 und –2) lassen sich unter Nutzung des Momentengleichgewichts und des Kraftgleichgewichts ermitteln. Es ergibt sich (vergleiche Bild 2.5-2): 0=−−+ frl MMMM (2.5-4) Die Momente ersetzen wir Hilfe der Dgl. der Biegelinie 2. Ordnung durch die zweiten
Ableitungen der Verschiebungen, d.h. ″−= *
ll EIvM und ″−= *
rr EIvM . Die zweiten Ab-leitungen ersetzen wir wie folgt durch Differenzenquotienten:
2212
221
21211*
2112
211
221*
222
222
hvvvv
hvv
hvv
hvv
xv
hvvvv
hvv
hvv
hvv
xv
iiiiiir
iiiiiil
−++−+−+−+
−+−
+−−=
−−
−=
−
∆∆
=″
+−−=
−−
−=
−∆∆
=″
Damit lassen sich die Schnittmomente in der Momentengleichgewichtsbeziehungen
ersetzen. Führen wir noch für des Federmoment )( 11*
iihTTf vvcvcM −=′
= + ergibt sich schließlich
02
12
2122 =−
−+
−+−
− ++−−
hvv
cMh
vvvvEI ii
Tii
( ) 211
2
22
22+−+− +−−−=− iiii
T vvvvEI
hcEIMh
vv (2.5-5)
Aus den Gleichgewicht der Kräfte folgt: F F cv FQ l Q r
− + − =* 0 (2.5-6) Auch hier ersetzen wir die Querkräfte durch die dritten Ableitungen und diese wieder-um durch die entsprechenden Differenzenquotienten (2.2-10)

2.5. Differenzenformeln für Rand- und Übergangsbedingungen 25
( ) ( )
( ) ( )212321123
21132113
331
331
331
331
++−++−−
+−−
+−+−=+−+−=′′′
+−+−=+−+−=′′′
iiiiir
iiiiil
vvvvh
vvvvh
v
vvvvh
vvvvh
v
Einsetzen in die Kraftgleichgewichtsbedingung liefert schließlich die noch fehlende Gleichung
( ) 02
121223
=+
−−−−+− ++−−
iiii
vvcFvvvv
hEI
( ) 211
33
22 2 +−+− ++++−=+ iiii vvvvEI
chEI
Fhvv (2.5-7)
Aus den beiden Gleichungen (2.5-5) und (2.5-7) können die Verschiebungen an den Punkten 2 und –2 ermittelt werden. Die Auflösung der beiden Gleichungen liefert
v vMhEI
c hEI
vc hEI
vFh
EIchEI
vchEI
viT
iT
i i i2 2
2
1
3 3 3
12 4 4= + + − − + ++ + + (2.5-8)
v vMhEI
c hEI
vc hEI
vFhEI
chEI
vchEI
viT
iT
i i i− − + += − − + − + +2 1
2
1
3 3 3
12 4 4 (2.5-9)
Eliminiert man mit diesen Gleichungen die Außenpunkte, erhält man die folgenden Gleichungen, die die Übergangsbedingungen enthalten.
6 4 1 04 6 4 1
1 4 6 40 1 4 6
0
0
3 3
3 3
2 3
2 34 4
4 4
1
1
2
2
2
−− + + − − +
− − + + + −−
=− +
+
−
+
+
c hEI
chEI
c hEI
chEI
c hEI
chEI
c hEI
chEI
i
i
i
i
MhEI
FhEI
MhEI
FhEI
T T
T T
vv
vv
(2.5-10)
Auf diese Weise ist die Berücksichtigung der genannten Größen möglich. Natürlich lassen sich auf analogem Wege auch Gleichungen für den Fall ermitteln, dass die Größen (Kraft, Moment, Feder und Drehfeder) direkt an dem Punkt i wirken. Diese Ableitung überlassen wir dem Leser und geben nachfolgend nur das Ergebnis an.
6 4 1
4 6 41 4 6
4 4
4
4 4
1
1
2
2
2
3
2
+ − −− + −− − +
=−
−
+
c hEI
c hEI
c hEI
c hEI
c hEI
i
i
i
MhEI
FhEI
MhEI
T T
T
T T
vv
v (2.5-11)

26 2. Das Differenzenverfahren
Berücksichtigung eines Gelenkes Nachfolgend soll noch gezeigt werden, wie sich ein Gelenk im Träger berücksichtigen lässt (Bild 2.5-4).
Bild 2.5-4: Träger mit Gelenk Es wird hier die gleiche Betrachtung angestellt wie bei der Berücksichtigung von Übergangsbedingungen, wobei hier zu fordern ist, dass das Moment am Punkt i ver-schwindet. Wir zerschneiden den träger wieder und betrachten den linken und den rechten teil des Trägers (Bild 2.5-5).
Bild 2.5-5: Linker und rechter Trägerabschnitt Aus der Forderung, dass das Moment verschwinden soll, ergibt sich
1111
1111
202:0202:0
+−+−
−−
−=→=+−=−=→=+−=
iiiir
iiiil
vvvvvvMvvvvvvM
(2.5-12)
Die Größe v2 ergibt sich aus der Bedingung, dass die Querkraft links und rechts vom unbelasteten Lager gleich ist. Mit der Differenzenformel für die Querkraft4, die einmal auf den linken und einmal auf den rechten Trägerteil angewandt wird, ergibt sich
( ) ( )11123111232222 +−++− −+−+−−=−+−+−− iiiiiiii vvvvvv
hEI
vvvvvvhEI
Daraus folgt: 2112 242 ++− +−+−= iiii vvvvv (2.5-13) Damit ergeben sich folgende Gleichungen:
=
−−−−
−
+
−
000
452012220025
1
1
i
i
i
vv
v (2.5-14)
4 Für den linken Trägerteil ergibt sich beispielsweise
( )[ ]
( )[ ]112131
2
2
111231
2
2
22
22
+−+++
−
+−−+−−=
−
∆
∆−=′′′−=
=+−−+−−=
−
∆
∆−=′′′−
iiiiiii
r
iiii
l
vvvvvvh
EIh
vv
xEIvEI
vvvvvvh
EIh
vv
xEIvEI
i-2 i-1 i 1 2
i-2 i-1 i 1 2
-1 i i+1 i+2
linker Trägerabschnitt (Index l)
rechter Trägerabschnitt (Index r)

2.6. Übungsaufgaben 27 2.6. Übungsaufgaben Beispiel 1 Im ersten Beispiel soll der Verformungs- und Schnittgrößenverlauf für einen Träger unter der Wirkung einer Einzellast ermittelt werden (Bild 2.6-1).
Bild 2.6-1: Träger mit Einzellast gegeben: EI, l, F gesucht: v(x), M(x), FQ(x)
Aus Symmetriegründen braucht nur der halbe Träger betrachtet zu werden. Wir wäh-len die in Bild 2.6-2 angegebene Diskretisierung des halben Trägers. Dabei ergeben sich vier Außenpunkte.
Bild 2.6-2: Diskretisierung des halben Trägers mit einer Schrittweite von l6
1 Die Differentialgleichung für diesen fall lautet ( )v 4 0= . Die Außenpunkte müssen mit Hilfe der Randbedingungen eliminiert werde. Die Randbedingungen lauten: 1) ( )v x = =0 0 2) ( )M x v= = → ′′ =0 0 0 3) ( )′ = =v x l
2 0
4) ( ) ( )F x F v xQl l F
EI= = ′′′ < = −2 2 22 Die Differenzenformel der Differentialgleichung lautet in symbolischer Schreibweise:
F
x
v l/2 l/2
EI
-2 -1 0 1 2 3 4 5
F21
h
x
v = 0

28 2. Das Differenzenverfahren
Mit den Randbedingungen 1 und 2 lassen sich die linken Außenpunkte eliminieren. Es ergibt sich: 1) v0 0=
2) ∆∆
2
20
1 0 1 1 10 2 0v
xv v v v v
= → − + = → = −− −
Daraus kann ein für den linken Rand modifizierter Differenzenoperator ermittelt wer-den (siehe Bild 2.6-3) Bild 2.6-3: Modifizierter Differenzenoperator für ein gelenkiges Lager Mit Hilfe der Randbedingungen 3 und 4 lässt sich auch ein modifizierter Operator für den rechten Rand gewinnen. Die Randbedingungen in Differenzenschreibweise erge-ben
3) 243
0 vvxv
=→=
∆∆
4) EIhF
vvvvEIF
xv
22
222
3
5421
33
3
−=+−+−→−=
∆∆
Damit ergibt sich der modifizierte Differenzenoperator für den rechten Rand (siehe Bild 2.6-4).
Bild 2.6-4: Modifizierter Differenzenoperator für einen Symmetrieschnitt mit Einzellast Die Anwendung der Differenzenoperatoren auf die drei Punkte 1, 2 und 3 liefert schließlich das folgende Gleichungssystem:
5 4 14 7 4
2 8 6
00
1
2
33
−− −
−
=
vvv Fh EI
(2.6-1)
Mit lh 6
1= lautet die Lösung dieses Gleichungssystems
v = 0
0
v = 0
vFhEI
=3

2.6. Übungsaufgaben 29
EIFl
v
EIFl
v
EIFl
v
3
3
3
2
3
1
02199074,0~
018518517,0~
010416665,0~
=
=
=
Zum Vergleich wird nachfolgend noch die exakter Lösung angegeben.
−= 2
22
34
116 l
xlx
EIFl
vex
Die exakte Lösung an den drei Punkten 1, 2 und 3 sowie der absolute Fehler der Nähe-rungslösung lauten:
%5,5020833330,0
%3,4017746913,0
%8,3010030863,0
3
3
3
2
3
2
1
3
1
−=→=
−=→=
−=→=
ε
ε
ε
EIFl
v
EIFl
v
EIFl
v
ex
ex
ex
Den Momentenverlauf kann man punktweise mit Hilfe der Differenzenformel für die Dgl. der Biegelinie zweiter Ordnung ermitteln, und man erhält die in Bild 2.6-5 ange-gebene symbolische Darstellung. Bild 2.6-5: Differenzenoperator für die Ermittlung des Momentenverlaufes Anwenden des Operators auf die Punkte 3, 2 und 1 liefert die folgenden Lösungen (zum Vergleich ist jeweils auch die exakte Lösung angegeben):
{ }
{ })25,0(;25045,0
~020833,00177469,072
~
2236~
33
3
3223
FlMFlM
FlM
vvlEI
M
ex ==
+−+=
+−+=
{ }
)166,0(;6~
166,0~
236~
22
32122
FlMFlM
vvvlEI
M
ex ==
−+−=
{ }
FlMFlM
vvlEI
M
ex 0833,0;0833,0~
236~
11
2121
==
−=
M EIv
EIh
= − ′′ = 2 v

30 2. Das Differenzenverfahren
Man erkennt, dass der Momentenverlauf bei diesem Beispiel exakt berechnet wird. Für den Querkraftverlauf ergibt sich die in Bild (2.6-6) angegebene symbolische Dar-stellung. Bild 2.6-6: Symbolische Darstellung zur Ermittlung des Querkraftverlaufes Wir wenden diese Formel auf den Punkt 2 an und erhalten:
{ }
)5,0(;5,0~
22108~
2
23132
FFFF
vvvl
EIF
exQ
Q
==
−+−−=
Auch der Querkraftverlauf wird hier durch das Differenzenverfahren exakt berechnet. Beispiel 2 Als zweites Beispiel betrachten wir die Berechnung eines Kragarms mit einem Ein-zelmoment am Ende (siehe Bild 2.6-7).
Bild 2.6-7: Kragbalken mit Einzelmoment; gegeben: M, l, EI; gesucht: v(x), M(x), FQ(x) Wir wählen wiederum eine grobe Diskretisierung mit drei Abschnitten im Intervall (siehe Bild 2.6-8).
Bild 2.6-8: Diskretisierung des Balkens Anwenden des Differenzenoperators für die Dgl. und Einarbeiten der Randbedingun-gen führt auf das folgende Gleichungssystem.
7 4 14 5 2
2 4 2
01
2
1
2
3
2−
− −−
= −
vvv
MhEI
(2.6-2)
F EIvEIhQ = − ′′′ = −
2 3 v
l
M EI
x
v(x)
-2 -1 0 1 2 3 4 5
M

2.6. Übungsaufgaben 31
Mit der Schrittweite 3l
h = lautet die Lösung des Gleichungssystems
vMl
EI
vMlEI
vMl
EI
1
2
2
2
3
2
1829
2
=
=
=
Dies entspricht der exakten Lösung; auch für die Momente und Querkräfte ergeben sich an den Gitterpunkten die exakten Lösungen.
Beispiel 3 Im Unterschied zum Beispiel 2 ist der Kragträger jetzt mit einer Linienlast belastet Bild 2.6-9).
Bild 2.6-9: Kragbalken mit Linienlast; gegeben: q, l, EI; gesucht: v(x), M(x), FQ(x)
Zur Lösung wird die gleiche Diskretisierung wie im Beispiel 2 benutzt (siehe Bild 2.6-10).
Bild 2.6-10: Diskretisierung des Kragbalkens Anwenden des Differenzenoperators für die Dgl. der Biegelinie 4. Ordnung auf die Punkte 1, 2 und 3 liefert:
Punkt 1: v v v v− + − +1 1 2 36 4 =qhEI
4
Punkt 2: − + − +4 6 41 2 3 4v v v v =qhEI
4
Punkt 3: v v v v v1 2 3 4 54 6 4− + − + =qhEI
4
-2 -1 0 1 2 3 4 5
l
q
EI x
v

32 2. Das Differenzenverfahren
Dabei wurde die Randbedingung 1) v0 0=
bereits ausgenutzt. Nach Einarbeitung der übrigen Randbedingungen 2) ′ =v0 0 v v− =1 1 3) M3 0= v v v4 3 22= − 4) FQ3 0= v v v v5 4 2 12 2= − + v v v v5 1 2 34 4= − + ergibt sich das folgende Gleichungssystems (2.6-3).
7 4 14 5 2
2 4 2
111
1
2
3
4−
− −−
=
vvv
qhEI
(2.6-3)
Mit hl
=3
lautet die Lösung von (2.6-3)
~ , ~
~ ,
~ ,
vqlEI
vqlEI
vqlEI
3
4
2
4
1
4
0 13888
0 080247
0 026017
=
=
=
)02212,0(
)06996,0(
)125,0(
4
1
4
2
4
3
EIql
v
EIql
v
EIql
v
ex
ex
ex
=
=
=
Das Moment an der Einspannung (Punkt Null) ergibt sich mit der Differenzenappro-ximation der zweiten Ableitung zu:
( )~ ,MEIh
v ql0 2 122 0 468= − = − ( M qlex0
20 5= − , ) Die Ermittlung der Querkraft genau am Punkt 0 ist problematisch, weil dabei der Au-ßenpunkt -2 mit eingeht. Es wird deshalb FQ bei x=h/2 ermittelt.
( )FEIh
v v qlQ 1
23 1 24 0 023809 27= − = ⋅,
F qlQ 1
20 6428= , ( F ql
Q ex12
0 833= , ~ )
Man erkennt, dass die Berücksichtigung von verteilten Lasten (bei einer groben Dis-kretisierung) problematisch ist und zu größeren Fehlern führen kann.

2.7. Eigenschaften von Diskretisierungsverfahren 33 2.7. Eigenschaften von Diskretisierungsverfahren Wir nehmen an, dass die gesuchte Funktion ( )xψ sein. Die unabhängige Variable x kann dabei sowohl Raumkoordinaten als auch die Zeit umfassen. Wir wollen für einen Punkt px die folgenden Lösungen unterscheiden: a) die exakte Lösung ( )pxψ der Dgl., b) die exakte Lösung pψ der diskretisierten Dgl., wobei h den Diskretisierungspara-
meter kennzeichnen soll und c) die tatsächlich berechnet Lösung p
~ψ . Wenn wir den Modellfehler außer Acht lassen, gibt es zwei wesentliche Fehlerquellen, den Diskretisierungsfehler und den Lösungsfehler. Der Diskretisierungsfehler charakterisiert die Differenz zwischen der exakten Lösung
)( pxψ der Dgl. und der exakten Lösung pψ der diskreten Gleichung, d.h.
( ) ppx ψψ − (2.4-1)
Der Lösungsfehler ist die Differenz zwischen der Näherungslösung der diskreten Gleichung und der exakten Lösung der diskreten Gleichung, d.h.
pp~ ψψ − (2.4-2)
Der für die praktische Anwendung wichtige Fehler ist der Gesamtfehler, der sich aus ( ) ppp xe ψψ ~−= (2.4-3) ergibt. Für die Beziehungen zwischen den verschiedenen Lösungen und Fehlern spie-len die Begriffe
• Konsistenz, • Stabilität und • Konvergenz
eine wichtige Rolle, die nachfolgend erläutert werden sollen. Konsistenz Eine Diskretisierungsmethode ist konsistent, wenn die diskretisierte Gleichung für
0→h in die ursprüngliche Differentialgleichung übergeht. Die Konsistenz stellt also einen Zusammenhang her zwischen der exakten Lösung der Dgl. und der exakten Lö-sung der diskretisierten Gleichung. Zum Nachweis der Konsistenz wird untersucht, ob der Fehler für 0→h gegen Null geht. An einem einfachen Beispiel wollen wir nach-folgend die Konsistenz eines Diskretisierungsverfahrens nachweisen und betrachten dazu eine Dgl. zweiter Ordnung.

34 2. Das Differenzenverfahren
Beispiel zum Nachweis der Konsistenz Wir betrachten die Dgl.
02
2
=∂∂
xψ . (2.7-4)
Und ersetzen die Ableitung an einem Punkt P durch den Differenzenquotienten
)21
112 ++−=′′ pp-pp (h
ψψψψ (2.7-5) Den Konsistenzfehler am Punkt P bezeichnen wir mit τP. Er ergibt sich aus der Diffe-renz der exakten Lösung der Dgl. am Punkt P und der Näherungslösung.
)2(1
)( 11-2 ++−−′′= ppppp hx ψψψψτ (2.7-6)
Zur Abschätzung des Fehlers entwickeln wir ψp-1 und ψp+1 in Taylor-Reihen5 an der Stelle xp ( hxx pp ±=±1 ) und erhalten für ψp-1
( )( )
( ) ( ) ( ) ( )
...241
61
21
...!4
1!3
1!2
1
)(!
432
432
p1
01
−′′′′+′′′−′′+′−=
′′′′−+′′′−+′′−+′−+=
−−= ∑−
=−
ppppp
ppppp
pp
n
p
hhhh
hhhh
xhxx
ψψψψψ
ψψψψψ
ν
ψψ ν
ν
ν
(2.7-7)
Analog ergibt sich für ψp+1
...241
61
21 432
1 +′′′′+′′′+′′+′+=+ pppppp hhhh ψψψψψψ (2.7-8)
Daraus folgt
...
121
2121
422
42
4211
+′′′′+′′=
−+′′′′+′′+=+− +−
pp
ppppppp
hh
hh
ψψ
ψψψψψψ K
Einsetzen in (2.7-6) liefert für den Konsistenzfehler
( ) ( ) ( )
...121
121
21
2
2112
+′′′′−=
+′′′′−′′−′′=+−−′′= +−
p
pppppppp
h
hxh
x
ψ
ψψψψψψψτ K (2.7-9)
Man erkennt, dass 0→pτ gilt für 0→h gilt. Das Verfahren ist also konsistent mit der Konsistenzordnung 2. Die Konsistenzordnung sagt aus, wie schnell der Fehler ab- 5 Taylorsche Formel:
( )( ) ( )( ) ( ) ( ) ( ) K3
002
000000
0 )(!3
1)(
!21
)()(!
xxxfxxxfxxxfxfxxxf
xf o −′′′+−′′+−′+=−= ∑∞
=
ν
ν
ν
ν

2.7. Eigenschaften von Diskretisierungsverfahren 35 klingt, wenn das Gitter verfeinert wird. Allerdings kann über die absolute Größe des Fehlers nichts ausgesagt werden! Stabilität Die Stabilität stellt einen Zusammenhang her zwischen der tatsächlich berechneten Lösung und der exakten Lösung der diskretisierten Gleichung! Eine Diskretisierungs-methode ist stabil, falls der Lösungsfehler pp ψψ −~ im ganzen Lösungsgebiet für alle Gitterpunkte begrenzt bleibt. Wir wollen nachfol-gend auch hierzu ein Beispiel angeben. Beispiel zur Ermittlung der Stabilität Als Beispiel betrachten wir die Differentialgleichung (Anfangswertproblem): 0=′+ ψψ ck (2.7-10) Wir diskretisieren diese Differentialgleichung an einem beliebigen Punkt x=xp+Θh, der im Intervall [xp+1, xp] liegt, wobei mit Θ=[0,1] ein Ort innerhalb dieses Intervalls spezifiziert werden kann. Aus einer linearen Interpolation ergibt sich für den Funkti-onswert an diesem Ort ( ) ppp ψψψ Θ−+Θ= +Θ+ 11 (2.7-11) Die erste Ableitung von (2.7-11) wird mittel des einfachen Differenzenquotienten ap-proximiert6
( )ppp hψψψ −=′ +Θ+ 1
1 (2.7-12) Damit lautet die bei x=xp+Θh diskretisierte Differentialgleichung
( )[ ] ( ) 01 11 =−+Θ−+Θ ++ pppp hc
k ψψψψ (2.7-13) Wir formen diese Gleichung um und erhalten die neue Lösung an der Stelle p+1 aus der bekannten Lösung an der Stelle p zu
( ) p1p 1 ψψ
+Θ−−=
+Θ + h
ck
hc
k (2-7-14) Mit der Abkürzung
c
hk=α (2.7-15)
6 Aus
dxd
d
d
dx
d ppp
ΘΘ
==′ Θ+Θ+Θ+
ψψψ folgt mit ( ) ppp ψψψ Θ−+Θ= +Θ+ 11 und x=xp+θh das Ergebnis
hppp1
)( 1 ψψψ −=′ +Θ+

36 2. Das Differenzenverfahren
lautet die Gleichung (2.7-14)
( )ppp Aψψ
αα
ψ =Θ+
Θ−−=+ 1
111 . (2.7-16)
mit
( )α
αΘ+
Θ−−=
111
A (2.7-17) Welche Bedingungen müssen nun Θ und α erfüllen, damit das Lösungsschema stabil ist? Es ist offensichtlich, dass sich die Lösung mit zunehmender Anzahl von Schritten nicht aufschaukeln darf. Es muss also gelten 11 ≤≤− A (2.7-18) Unter Beachtung der Tatsache, dass in unserem Fall stets α>0 und Θ>0 gilt, liefert ei-ne Untersuchung der beiden Fälle (i) A≤−1 und (ii) 1≤A folgendes Ergebnis. (i) A≤−1
Daraus folgt
( )[ ]α
αΘ+
Θ−−≤−
111
1 , was schließlich wegen α>0 und Θ>0 zu 2)21( ≤Θ−α führt. Wir nehmen jetzt an, dass (1-2Θ)>0 ist. Dann ergibt sich
Θ−
≤212
α
Ersetzt man die Abkürzung c
hk=α und stellt nach h um, erhält man schließlich als
Bedingung für h
kc
hΘ−
≤212 )
21
0für( <Θ≤ (2.7-19)
Die Schrittweite h muß also für den Fall 210 <Θ≤ die obige Bedingung erfüllen.
Das Lösungsverfahren wir in diesem Fall als bedingt stabil bezeichnet. Für den Fall, dass d.h. 2
1≥Θ ist, ergibt sich ( ) 212 ≤−Θ−α , woraus
( )122−Θ
−≥α
folgt. Da der Nenner positiv ist, ist diese Bedingung für jedes beliebige α und da-mit auch für jedes beliebige h erfüllt . Ein Verfahren mit 2
1≥Θ ist also unbedingt stabil, d.h. es gibt keine Bedingung, die die Schrittweite h erfüllen muss, um die Stabilität des Verfahrens zu sichern.

2.7. Eigenschaften von Diskretisierungsverfahren 37 (ii) 1≤A
Daraus folgt
( )1
111
≤Θ+
Θ−−α
α
woraus durch Umformen schließlich die stets erfüllte Lösung
01 ≤−
folgt, die keine neuen Erkenntnisse bringt. Konvergenz Die numerisch berechnete Lösung muss bei immer feiner werdender Gitterweite im-mer besser mit der exakten Lösung der Differentialgleichung übereinstimmen. Diese Eigenschaft wird als Konvergenz bezeichnet. Satz (Äquivalenztheorem von LAX)7 Für ein konsistentes Diskretisierungsschema ist die Stabilität eine notwendige und hin-reichende Bedingung für dessen Konvergenz. Zur Überprüfung der Konvergenz muss also zunächst die Konsistenz eines Verfahrens überprüft werden. Wenn dann die Stabilität der Lösung gezeigt werden kann, ist si-chergestellt, dass das Lösungsverfahren konvergiert. Abschließend sei in diesem Zusammenhang noch erwähnt, dass es neben der Siche-rung der Konsistenz, der Stabilität und der Konvergenz bei der Anwendung von Dis-kretisierungsmethoden weiterhin sehr wichtig ist, dass sogenannte Erhaltungseigen-schaften der Differentialgleichung (bzw. der damit beschriebenen physikalischen Vor-gänge) unabhängig von der Wahl des Gitters auch von den diskretisierten Gleichungen erfüllt werden. So kann es beispielsweise passieren, dass durch den Lösungsprozess dem physikalischen System laufend Energie zugeführt wird, wodurch sich ein physi-kalisch unbrauchbare Lösung ergeben kann.
7 Anmerkung: Der obige Satz gilt strenggenommen nur für lineare Systeme.

38 2. Das Differenzenverfahren



![Glossar Deutsch- Griechisch - praxis.gr · 7a Jägerschnitzel, das, - σνίτσελ του κυνηγού [με μανιτάρια] 7a Kalbfleisch, das μοσχαρίσιο κρέας](https://static.fdocument.org/doc/165x107/5e06fe20a88f4c06457803b9/glossar-deutsch-griechisch-7a-jgerschnitzel-das-ff-.jpg)