(1) Valeurs propres réelles et distinctes négatives...
23
MODÉLISATION ET SIMULATION TP 6 : DESSIN QUALITATIF DES PORTRAITS DE PHASE (III/IV) 1. Récapitulatif des différents cas (1) Valeurs propres réelles et distinctes négatives : noeud stable -1 -0.5 0 0.5 1 -1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 λ 1 =-3, λ 2 =-1 1
Transcript of (1) Valeurs propres réelles et distinctes négatives...

MODÉLISATION ET SIMULATIONTP 6 : DESSIN QUALITATIF DES PORTRAITS DE
PHASE (III/IV)
1. Récapitulatif des différents cas
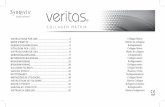
(1) Valeurs propres réelles et distinctes négatives : noeud
stable
−1 −0.5 0 0.5 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
λ1=−3, λ
2=−1
1

MODÉLISATION ET SIMULATIONTP 6 : DESSIN QUALITATIF DES PORTRAITS DE PHASE (III/IV)2
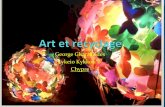
(2) Valeurs propres réelles et distinctes positives : noeud
instable
−1 −0.5 0 0.5 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
λ1=1, λ
2=4

MODÉLISATION ET SIMULATIONTP 6 : DESSIN QUALITATIF DES PORTRAITS DE PHASE (III/IV)3
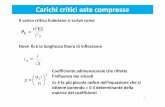
(3) Valeurs propres réelles et distinctes positive et néga-
tive : selle
−1 −0.5 0 0.5 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
λ1=11, λ
2=−4

MODÉLISATION ET SIMULATIONTP 6 : DESSIN QUALITATIF DES PORTRAITS DE PHASE (III/IV)4
(4) Une valeur propre nulle et une réelle négative : système
non-simple stable
−1 −0.5 0 0.5 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
λ1=0, λ
2=−1

MODÉLISATION ET SIMULATIONTP 6 : DESSIN QUALITATIF DES PORTRAITS DE PHASE (III/IV)5
(5) Une valeur propre nulle et une réelle positive : système
non-simple instable
−1 −0.5 0 0.5 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
λ1=0, λ
2=1

MODÉLISATION ET SIMULATIONTP 6 : DESSIN QUALITATIF DES PORTRAITS DE PHASE (III/IV)6
(6) Valeurs propres réelles et non-distinctes avec matrice
A diagonalisable : noeud singulier
−1 −0.5 0 0.5 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
λ1=−1, λ
2=−1

MODÉLISATION ET SIMULATIONTP 6 : DESSIN QUALITATIF DES PORTRAITS DE PHASE (III/IV)7
(7) Valeurs propres réelles et non-distinctes avec matrice
A non diagonalisable (un seul vecteur propre et une
valeur propre négative) : noeud dégénéré stable
2v

MODÉLISATION ET SIMULATIONTP 6 : DESSIN QUALITATIF DES PORTRAITS DE PHASE (III/IV)8
(8) Valeurs propres réelles et non-distinctes avec matrice
A non diagonalisable (un seul vecteur propre et une
valeur propre positive) : noeud dégénéré instable
−1 −0.5 0 0.5 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
λ1=1, λ
2=1

MODÉLISATION ET SIMULATIONTP 6 : DESSIN QUALITATIF DES PORTRAITS DE PHASE (III/IV)9
(9) Valeurs propres complexes conjuguées avec partie réelle
nulle : centre
−1 −0.5 0 0.5 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
λ1=5.5511e−017+2.2361i, λ
2=5.5511e−017−2.2361i

MODÉLISATION ET SIMULATIONTP 6 : DESSIN QUALITATIF DES PORTRAITS DE PHASE (III/IV)10
(10) Valeurs propres complexes conjuguées avec partie réelle
négative : foyer stable
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1

MODÉLISATION ET SIMULATIONTP 6 : DESSIN QUALITATIF DES PORTRAITS DE PHASE (III/IV)11
(11) Valeurs propres complexes conjuguées avec partie réelle
positive : foyer instable
−1 −0.5 0 0.5 1
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
λ1=2+2i, λ
2=2−2i

MODÉLISATION ET SIMULATIONTP 6 : DESSIN QUALITATIF DES PORTRAITS DE PHASE (III/IV)12
2. Rappel : Règles heuristiques pour dessiner un
portrait de phases qualitatif
(1) Calculer les valeurs propres. En déduire le type de sys-
tème et la nature de l’équilibre.
(2) Calculer, s’il y a lieu, les vecteurs propres, et en déduire
les droites invariantes.
(3) Calculer les isoclines et associer les signes des dérivées
aux portions du plan délimitées par ces isoclines.
(4) Dessiner les vecteurs vitesse pour certains points bien
choisis.
(5) Tracer des trajectoires qualitativement :
(a) Par chaque point passe une et une seule trajectoire.
Aucun croisement n’est donc possible.
(b) Utiliser les signes associées aux portions du plan
par les isoclines.
(c) Utiliser les vecteurs propres pour déterminer la di-
rection asymptotique de la trajectoire.

MODÉLISATION ET SIMULATIONTP 6 : DESSIN QUALITATIF DES PORTRAITS DE PHASE (III/IV)13
3. Exercice 1 : dessin qualitatif
Soit le système
A =
2 1
1 2
– Calculer les valeurs propres et en déduire le type du sys-
tème
– Calculer les isoclines et dessiner des vecteurs vitesse sur
ces isoclines
– Associer les signes des portions du plan délimitées par
les isoclines.
– Tracer des trajectoires qualitativement

MODÉLISATION ET SIMULATIONTP 6 : DESSIN QUALITATIF DES PORTRAITS DE PHASE (III/IV)14
4. Exercice 1 : dessin qualitatif
Soit le système
A =
2 1
1 2
– Calculer les valeurs propres et en déduire le type du sys-
tème
λ2 − 4λ + 3 = 0
λ1,2 =4 ±
√4
2= {1, 3}
Les deux valeurs sont réelles, distinctes et positives, nous
avons donc un noeud instable.

MODÉLISATION ET SIMULATIONTP 6 : DESSIN QUALITATIF DES PORTRAITS DE PHASE (III/IV)15
– Calculer les vecteurs propres et en déduire les droites
invariantes :
(A − λ1I)v1 = 0
⇐⇒
1 1
1 1
x
y
=
0
0
⇐⇒
x
y
= k ·
1
−1
∀k
=⇒ v1 =
1
−1
(A − λ2I)v2 = 0
⇐⇒
−1 1
1 −1
x
y
=
0
0
⇐⇒
x
y
= k ·
1
1
∀k
=⇒ v2 =
1
1
Les droites invariantes ont donc pour équations x2 = x1
et x2 = −x1.

MODÉLISATION ET SIMULATIONTP 6 : DESSIN QUALITATIF DES PORTRAITS DE PHASE (III/IV)16
– Calculer les isoclines :
2x1 + x2 = 0 ⇐⇒ x2 = −2x1
x1 + 2x2 = 0 ⇐⇒ x2 = −x1/2
– Tracer des trajectoires qualitativement
– Solution :
−+ 1
dx /dt=01
dx /dt=02
dx /dt=02
++
++
+−
−−
dx /dt=0

MODÉLISATION ET SIMULATIONTP 6 : DESSIN QUALITATIF DES PORTRAITS DE PHASE (III/IV)17
5. Exercice 2 : dessin qualitatif
Soit le système
A =
−1 −1
1 −1
– Calculer les valeurs propres et en déduire le type du sys-
tème
– Calculer les isoclines et dessiner des vecteurs vitesse sur
ces isoclines
– Associer les signes des portions du plan délimitées par
les isoclines.
– Tracer des trajectoires qualitativement

MODÉLISATION ET SIMULATIONTP 6 : DESSIN QUALITATIF DES PORTRAITS DE PHASE (III/IV)18
6. Exercice 2 : dessin qualitatif
Soit le système
A =
−1 −1
1 −1
– Calculer les valeurs propres et en déduire le type du sys-
tème
λ2 + 2λ + 2 = 0
λ1,2 =−2 ±
√−4
2= −1 ± i
Nous avons deux complexes conjugués avec partie réelle
négative, l’origine est donc un foyer stable. (Dans ce cas,
les droites invariantes n’existent pas.)
– Calculer les isoclines et dessiner des vecteurs vitesse sur
ces isoclines :
−x1 − x2 = 0 ⇐⇒ x2 = −x1
x1 − x2 = 0 ⇐⇒ x2 = x1
– Associer les signes des portions du plan délimitées par
les isoclines.
– Tracer des trajectoires qualitativement

MODÉLISATION ET SIMULATIONTP 6 : DESSIN QUALITATIF DES PORTRAITS DE PHASE (III/IV)19
– Solution :
−+
1
dx /dt=01
2dx /dt=0
2dx /dt=0
−+
−−−−
+−
+−
++++
dx /dt=0

MODÉLISATION ET SIMULATIONTP 6 : DESSIN QUALITATIF DES PORTRAITS DE PHASE (III/IV)20
7. Exercice 3 : dessin qualitatif
Soit le système
A =
−2 0
−4 −2
– Calculer les valeurs propres et en déduire le type du sys-
tème
– Calculer les isoclines et dessiner des vecteurs vitesse sur
ces isoclines
– Associer les signes des portions du plan délimitées par
les isoclines.
– Tracer des trajectoires qualitativement

MODÉLISATION ET SIMULATIONTP 6 : DESSIN QUALITATIF DES PORTRAITS DE PHASE (III/IV)21
8. Exercice 3 : dessin qualitatif
Soit le système
A =
−2 0
−4 −2
– Calculer les valeurs propres et en déduire le type du sys-
tème
λ2 + 4λ + 4 = 0
λ1,2 =−4
2= −2
– Calculer les vecteurs propres et en déduire les droites
invariantes :
(A − λ1I)v1 = 0
⇐⇒
0 0
−4 0
x
y
=
0
0
⇐⇒
x
y
= k ·
0
1
∀k
=⇒ v1 =
0
1

MODÉLISATION ET SIMULATIONTP 6 : DESSIN QUALITATIF DES PORTRAITS DE PHASE (III/IV)22
L’unique vecteur propre est [0, 1]. La droite invariante
est donc l’axe x2.
– Nous avons deux valeurs propres réelles confondues né-
gatives et un seul vecteur popre, l’origine est donc un
noeud dégénéré stable.
– Calculer les isoclines :
−2x1 = 0 ⇐⇒ x1 = 0
−4x1 − 2x2 = 0 ⇐⇒ x2 = −2x1
– Tracer des trajectoires qualitativement

MODÉLISATION ET SIMULATIONTP 6 : DESSIN QUALITATIF DES PORTRAITS DE PHASE (III/IV)23
– Solution :
−+ dx /dt=0
2dx /dt=0 dx /dt=01
−−+−
++
++−−
2
![Lezione 1 Elettrostatica - unina.it · Matrice p: matrice dei nodi della mesh [2*Np] (Np è il numero di nodi della mesh). La prima riga contiene le ascisse dei nodi, la seconda contiene](https://static.fdocument.org/doc/165x107/5f03f0267e708231d40b8315/lezione-1-elettrostatica-uninait-matrice-p-matrice-dei-nodi-della-mesh-2np.jpg)