Exercices et corrigés Mathématique générale · 2015-07-17 · Tout savoir d’une forme...
251
Université libre de Bruxelles Années académiques 2008-2050 Université catholique de Louvain Exercices et corrigés Mathématique générale Version β Laurent Claessens Nicolas Richard Dernière modification : 15 septembre 2011 http://student.ulb.ac.be/~lclaesse/ http://gitorious.org/math-gene-ulb
Transcript of Exercices et corrigés Mathématique générale · 2015-07-17 · Tout savoir d’une forme...

Université libre de Bruxelles Années académiques 2008-2050Université catholique de Louvain
Exercices et corrigésMathématique générale
Version β
Laurent Claessens
Nicolas Richard
Dernière modification : 15 septembre 2011http://student.ulb.ac.be/~lclaesse/
http://gitorious.org/math-gene-ulb

2
Copyright (c) 2009-2010 Laurent Claessens.Permission is granted to copy, distribute and/or modify this document under
the terms of the GNU Free Documentation License, Version 1.3 or any later versionpublished by the Free Software Foundation ; with no Invariant Sections, no Front-Cover Texts, and no Back-Cover Texts. A copy of the license is included in thesection entitled “GNU Free Documentation License”.
Si vous n’avez pas envie de lire toute la licence (ce que je comprends), en voiciun mini résumé :
– Si vous donnez un pdf du document ou d’une partie à quelqu’un, vous devezlui dire en même temps où il peut télécharger les sources LATEX. En pratique,le site sur lequel j’ai mit les sources actuelles est déjà indiqué sur la page degarde. Il n’y a donc rien à faire.
– Si vous modifiez le document, les nouvelles sources LATEX doivent être pub-liées sur internet à une adresse publiquement accessible 1, et le site où lessources se trouvent doit être indiqué dans le document.
– En cas de modification, vous pouvez ajouter votre nom à la liste des au-teurs des fichiers modifiés, mais vous ne pouvez pas retirer les noms déjàexistants, de plus les modifications elles-mêmes doivent être publiés sous lamême licence, et les sources LATEX des modifications doivent également êtrepubliquement accessibles.
Le but principal de ces conditions est d’éviter que le document deviennentinutilisable parce que les sources LATEX seront perdues dans 5 ans. Cela arrivetrop souvent. Il s’agit d’un échange : je donne gratuitement le droit de copier,modifier et redistribuer le document, mais en échange, vous devez prendre soin dessources, et transmettre ces droits aux personnes à qui vous distribuez des versionsmodifiées.
Vous n’êtes par contre absolument pas obligés de me tenir au courant desmodifications que vous apportez, bien que cela soit souhaitable pour que chacunpuisse profiter des améliorations de tous les autres.
1. Les sites protégés par un mot de passe ne sont pas valables ; la dropbox non plus.

Table des matières
Introduction 7
1 Corrigez vous vous-même 91.1 Propagande : utilisez un ordinateur ! . . . . . . . . . . . . . . . . . 91.2 Exemples de ce que Sage peut faire pour vous . . . . . . . . . . . . 10
2 Rappels théoriques 112.1 Techniques d’intégration . . . . . . . . . . . . . . . . . . . . . . . . 11
2.1.1 Reformer un carré au dénominateur . . . . . . . . . . . . . . 112.2 Primitives et surfaces . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.2.1 Longueur d’arc de courbe . . . . . . . . . . . . . . . . . . . 132.2.2 Aire de révolution . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3 Équations différentielles . . . . . . . . . . . . . . . . . . . . . . . . 142.3.1 Équations à variables séparées . . . . . . . . . . . . . . . . . 142.3.2 Équations homogènes . . . . . . . . . . . . . . . . . . . . . . 142.3.3 Équations linéaires . . . . . . . . . . . . . . . . . . . . . . . 15
2.4 Équations différentielles du second ordre . . . . . . . . . . . . . . . 162.4.1 Avec second membre . . . . . . . . . . . . . . . . . . . . . . 16
2.5 Fonctions réelles de deux variables réelles . . . . . . . . . . . . . . . 162.5.1 Limites de fonctions à deux variables . . . . . . . . . . . . . 162.5.2 Dérivées partielles . . . . . . . . . . . . . . . . . . . . . . . . 172.5.3 Différentielle et accroissement . . . . . . . . . . . . . . . . . 182.5.4 Recherche d’extrema locaux . . . . . . . . . . . . . . . . . . 19
2.6 Méthode de Gauss pour résoudre des systèmes d’équations linéaires 192.7 Matrices, applications linéaires et directions conservées . . . . . . . 21
2.7.1 Comment trouver la matrice d’une symétrie donnée ? . . . . 22Symétrie par rapport à un plan . . . . . . . . . . . . . . . . 22Symétrie par rapport à une droite . . . . . . . . . . . . . . . 24En résumé . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.8 Orthogonalité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3

4 TABLE DES MATIÈRES
3 Analyse 253.1 Limites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.2 Dérivées et optimisation . . . . . . . . . . . . . . . . . . . . . . . . 263.3 Primitives et intégration . . . . . . . . . . . . . . . . . . . . . . . . 27
3.3.1 Longueur d’un arc de courbe . . . . . . . . . . . . . . . . . . 293.3.2 Aire d’une surface de révolution . . . . . . . . . . . . . . . . 30
3.4 Équations différentielles . . . . . . . . . . . . . . . . . . . . . . . . 303.4.1 Équations à variables séparées . . . . . . . . . . . . . . . . . 303.4.2 Équations homogènes . . . . . . . . . . . . . . . . . . . . . . 303.4.3 Équations linéaires . . . . . . . . . . . . . . . . . . . . . . . 313.4.4 Problèmes divers . . . . . . . . . . . . . . . . . . . . . . . . 313.4.5 Équations différentielles du second ordre . . . . . . . . . . . 32
3.5 Fonctions de deux variables réelles . . . . . . . . . . . . . . . . . . . 343.5.1 Tracer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343.5.2 Limites à deux variables . . . . . . . . . . . . . . . . . . . . 343.5.3 Dérivées partielles, différentielles totales . . . . . . . . . . . 363.5.4 Différentiabilité, accroissements finis . . . . . . . . . . . . . 373.5.5 Plan tangent . . . . . . . . . . . . . . . . . . . . . . . . . . 393.5.6 Dérivées de fonctions composées . . . . . . . . . . . . . . . . 403.5.7 Dérivées de fonctions implicites . . . . . . . . . . . . . . . . 413.5.8 Extrema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423.5.9 Réserve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4 Algèbre linéaire, vecteur et matrices 454.1 Déterminants et systèmes d’équations . . . . . . . . . . . . . . . . . 454.2 Opérations sur les matrices . . . . . . . . . . . . . . . . . . . . . . . 494.3 Espaces vectoriels . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.3.1 Orthogonalité . . . . . . . . . . . . . . . . . . . . . . . . . . 544.4 Valeurs propres et vecteurs propres . . . . . . . . . . . . . . . . . . 554.5 Triangularisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 584.6 Formes quadratiques . . . . . . . . . . . . . . . . . . . . . . . . . . 59
4.6.1 Réserve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5 Interrogation de janvier 2009 (ULB) 63
6 Interrogation de mars 2010 (UCL) 67
7 Travaux personnels 2009 (ULB) 697.1 TP-1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 697.2 TP-2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 697.3 TP-3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69

TABLE DES MATIÈRES 5
7.4 TP-4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 707.4.1 Quelque fautes usuelles . . . . . . . . . . . . . . . . . . . . . 71
7.5 TP-5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
8 Autres exercices 738.1 Limites et continuité . . . . . . . . . . . . . . . . . . . . . . . . . . 768.2 Suites numériques . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
9 Des corrections pour les pharmaciens (ULB) 81
10 Corrections 85
11 GNU Free Documentation License 24111.1 Preamble . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24111.2 APPLICABILITY AND DEFINITIONS . . . . . . . . . . . . . . . 24211.3 VERBATIM COPYING . . . . . . . . . . . . . . . . . . . . . . . . 24311.4 COPYING IN QUANTITY . . . . . . . . . . . . . . . . . . . . . . 24411.5 MODIFICATIONS . . . . . . . . . . . . . . . . . . . . . . . . . . . 24411.6 COMBINING DOCUMENTS . . . . . . . . . . . . . . . . . . . . . 24611.7 COLLECTIONS OF DOCUMENTS . . . . . . . . . . . . . . . . . 24711.8 AGGREGATION WITH INDEPENDENT WORKS . . . . . . . . 24711.9 TRANSLATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24711.10TERMINATION . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24811.11FUTURE REVISIONS OF THIS LICENSE . . . . . . . . . . . . . 24811.12RELICENSING . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24911.13ADDENDUM : How to use this License for your documents . . . . 249
Bibliographie 251

6 TABLE DES MATIÈRES

Introduction
Ces notes proviennent des exercices tant du cours de mathématique généralepour les géographes de l’ULB que de celui pour les ingénieurs de l’UCL. Lesmatières sont similaires (algèbre linéaire et analyse de base), et il semble doncprofitable aux deux de proposer tous les exercices dans un unique document.
Ces notes sont les vôtres !
Ces notes sont en rédaction perpétuelle ; il y a encore certainement des erreurs,des fautes de frappe et des choses pas claires. Je compte sur vous (oui : toi !) pourme signaler toute imperfection.
Plus vous signalez de fautes, plus la qualité du texte augmentera, et plus lesétudiants de l’année prochaine vous seront reconnaissants.
Avouons les sources inavouables
Plusieurs corrections viennent presque mot à mot de feuilles que des étudi-ant(e)s m’ont données pour relecture.
Autres notes
Un certain nombre de pré requis qui auraient pu ou dû être vus en secondairesont disponibles 2, ou dans la section de sixième année du site enseignons.be.
2. http://student.ulb.ac.be/~lclaesse/echa.pdf
7

8 TABLE DES MATIÈRES

Chapitre 1
Corrigez vous vous-même
1.1 Propagande : utilisez un ordinateur !
Si vous faites des exercices supplémentaires et que vous voulez des corrections,n’oubliez pas que vous avez un ordinateur à disposition. De nos jours, les ordina-teurs sont capables de calculer à peu près tout ce qui se trouve dans vos cours demath.
D’ailleurs, je te rappelle qu’on est déjà largement dans le vingt et unième siècleet que tu te destines à une carrière professionnelle dans laquelle tu auras des calculsà faire ; si tu n’es pas encore capable d’utiliser un ordinateur pour faire ces calculs,il est temps de combler cette lacune.
Le logiciel que je vous propose est Sage[1]. Pour l’utiliser, il n’est même pasnécessaire de l’installer sur votre ordinateur : il tourne en ligne, directement dansvotre navigateur.
a. Aller sur http ://www.sagenb.org
b. Créer un compte
c. Créer des feuilles de calcul et amusez-vous ! !
Il y a beaucoup de documentation sur le site officiel 1.Si vous comptez utiliser régulièrement ce logiciel, je vous recommande chaude-
ment de l’installer sur votre ordinateur 2. Ce logiciel étant distribué sous licenceGPL, vous ne devez ni payer ni vous procurer de codes.
1. http ://www.sagemath.org2. Le paquet sagemath.deb fourni par Ubuntu est très bogué, ne l’utilisez pas.
9

10 CHAPITRE 1. CORRIGEZ VOUS VOUS-MÊME
1.2 Exemples de ce que Sage peut faire pourvous
Pour certaines choses complexes, j’ai tapé un module nommé outilsINGE. Pourl’obtenir, allez sur gitorious et téléchargez le fichier outilsINGE.py ainsi que tousles fichiers dont le nom termine par .sage. Ces derniers contiennent le code quifournit les réponses pour un certain nombre d’exercices.
Voici une liste absolument pas exhaustive de ce que Sage peut faire pour vous,avec des exemples.
a. Calculer des limites de fonctions, voir l’exercice janvier 2009, 18,
b. D’autres limites et tracer des fonctions, voir l’exercice janvier 2009, 21.
c. Calculer des dérivées, voir exercice 4.
d. Calculer des dérivées partielles de fonctions à plusieurs variables, voir exercice49.
e. Calculer des primitives, voir certains exercices 8
f. Résoudre des systèmes d’équations linéaires. Lire la documentation est ce quifait la différence entre l’être humain et le non scientifique. Voir les exercices93 et 95.
g. Tout savoir d’une forme quadratique, voir exercice 148.
h. Calculer la matrice Hessienne de fonctions à deux variables, déterminer lespoints critiques, déterminer le genre de la matrice Hessienne aux points cri-tiques et écrire extrema de la fonctions (sous réserve d’être capable de ré-soudre certaines équations), voir les exercices 76 et 77.
i. Lorsqu’il y a une infinité de solutions, Sage vous l’indique avec des paramètres(ne fonctionne hélas pas avec les fonctions trigonométriques), voir l’exercice78.

Chapitre 2
Rappels théoriques
2.1 Techniques d’intégration
2.1.1 Reformer un carré au dénominateur
Lorsqu’on a un second degré au dénominateur, le bon plan est de reformer uncarré parfait. Par exemple :
x2 + 2x + 2 = (x + 1)2 + 1. (2.1)
Ensuite, le changement de variable t = x + 1 est pratique parce que cela donnet2 + 1 au dénominateur.
Cherchons
I =∫ 1 − x
x2 + 2x + 2dx =
∫ 1 − x
(x + 1)2 + 1dx =
∫ 1 − (t − 1)t2 + 1
(2.2)
où nous avons fait le changement de variable t = x + 1, dt = dx. L’intégrale secoupe maintenant en deux parties :
I =∫ −t
t2 + 1+∫ 2
t2 + 1. (2.3)
La seconde est dans les formulaires et vaut
2 arctan(t) = 2 arctan(x + 1), (2.4)
tandis que la seconde est presque de la forme f ′/f :
∫ t
t2 + 1=
12
∫ 2t
t2 + 1=
12
ln(t1 + 1) =12
ln(u2 + 2u + 2). (2.5)
11

12 CHAPITRE 2. RAPPELS THÉORIQUES
2.2 Primitives et surfaces
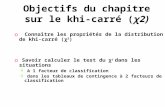
Soit f : R → R, une fonction continue, et x ∈ R. Pour chaque x ∈ R, nouspouvons considérer le nombre F (x) défini par
F (x) =∫ x
af(t)dt. (2.6)
La fonction F ainsi définie a deux importantes propriétés :
a x
f(x)
S = F (x) =∫ x
a f(t)dt
Figure 2.1 – La primitive décrit la surface
a. C’est une primitive de f ,
b. Elle donne la surface en dessous de f entre les points a et x, voir la figure2.1.
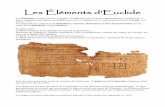
Notons que tant que f est positive, la surface est croissante.La manière de calculer la surface comprise entre deux fonctions est dessinée à
la figure 2.2. La surface entre les deux fonctions y1(x) et y2(x) se calcule commesuit.
a. On calcule les intersections entre y1 et y2. Notons a et b les ordonnéesobtenues.
b. La surface demandée est la différence entre la surface sous la fonction y1 (laplus grande) et la surface sous la fonction y2 (la plus petite), donc
S =∫ b
ay1 −
∫ b
ay1. (2.7)

2.2. PRIMITIVES ET SURFACES 13
b
ab
b(a) Nous voulons savoir la surface entre ces deux courbes.
b
ab
b(b) La plus grande surface
b
ab
b(c) La surface à soustraire
Figure 2.2 – Le calcul de la surface comprise entre deux fonctions.
2.2.1 Longueur d’arc de courbe
La longueur de l’arc de courbe de la fonction y = f(x) entre les abscisses x0 etx1 est donné par la formule
l(x0, x1) =∫ x1
x0
√
1 + y′(t)2dt. (2.8)
Lorsque la courbe est donnée sous forme paramétrique{
x = x(t) (2.9a)
y = y(t), (2.9b)
alors la formule devient
l(t1, t2) =∫ t2
t1
√
x(t)2 + y(t)2dt, (2.10)
où x(t) = x′(t).

14 CHAPITRE 2. RAPPELS THÉORIQUES
2.2.2 Aire de révolution
Pour savoir l’aire engendrée par la ligne y = f(x) entre a et b autour de l’axeOx, on utilise la formule
S = 2π∫ b
a
√
1 + f ′(x)2f(x)dx. (2.11)
2.3 Équations différentielles
2.3.1 Équations à variables séparées
Ce sont les équations pour lesquelles on peut mettre tous les y d’un côté. Ellesse présentent sous la forme
y′ = u(x)f(y). (2.12)
On peut évidement mettre tous les y et y′ d’un côté :
y′
f(y)= u(x). (2.13)
Une fois que cela est fait, on écrit y′ = dydx
, et on envoie le dx du côté des x :
dy
f(y)= u(x)dx. (2.14)
Maintenant il suffit de prendre l’intégrale des deux côtés : comme la position desdx et dy l’indiquent, il faut intégrer par rapport à y d’un côté et par rapport à dxde l’autre côté.
L’intégrale à gauche est facile : c’est ln(y). À droite, par contre, ça dépend toutà fait de u.
2.3.2 Équations homogènes
Une équation différentielle homogène se présente sous la forme
y′ =degré n en x, y
degré n en x, y, (2.15)
avec pas de y′ à droite : juste du y et du x.Pour traiter une équation différentielle homogène, le bon plan est de changer
de fonction inconnue et poser
u(x) =y(x)
x, (2.16)
ce qui fait y = ux et y′(x) = u(x) + xu′(x), à replacer dans l’équation de départ.

2.3. ÉQUATIONS DIFFÉRENTIELLES 15
2.3.3 Équations linéaires
Tant qu’il n’y a pas de second membre, c’est facile. Prenons l’exemple suivant :
y′ + 2xy = 0. (2.17)
Nous mettons tous les x d’un côté et tous les y et y′ de l’autre :
y′
y= −2x, (2.18)
et puis on intègre sans oublier la constante d’intégration :
ln(y) = −x2 + C, (2.19)
et donc y(x) = Ke−x2.
Lorsqu’il y a un second membre, il y a une astuce. Prenons par exemple
y′ + 2xy = 4x. (2.20)
L’astuce est de commencer par résoudre l’équation sans le second membre (l’équa-tion homogène associée). Nous notons yH la solution. Ici, la réponse est
yH(x) = Ke−x2
. (2.21)
Ensuite le truc est d’essayer de trouver la solution de l’équation (2.20) sous laforme
y(x) = K(x)ex2
. (2.22)
L’idée est de prendre la même que la solution de l’équation homogène (sans secondmembre), mais en disant que K est une fonction. Afin de trouver la fonction Kqui donne la solution, il suffit de remettre l’essai (2.22) dans l’équation (2.20) :
K ′e−x2 − 2xKe−x2
︸ ︷︷ ︸
y′(x)
+ 2xKe−x2
︸ ︷︷ ︸
2xy(x)
= 4x (2.23)
Les deux termes avec K se simplifient et il reste
K ′(x) = 4xex2
, (2.24)
ce qui signifie K(x) = 2ex2+C . Nous avons donc déterminé la fonction qui faitfonctionner l’essai, et la solution à l’équation est
y(x) =(
2ex2
+ C)
e−x2
= 2 + Ce−x2
. (2.25)

16 CHAPITRE 2. RAPPELS THÉORIQUES
2.4 Équations différentielles du second ordre
2.4.1 Avec second membre
Une équation différentielle du second ordre avec un second membre se présentesous la forme
ay′′(x) + by′(x) + cy(x) = v(x) (2.26)
où v(x) est une fonction donnée. Le truc est de commencer par résoudre l’équationdifférentielle sans second membre, c’est à dire trouver la fonction yH(x) telle que
ay′′H(x) + by′
H(x) + cyH(x) = 0. (2.27)
Cela se fait en utilisant la méthode du polynôme caractéristique.Ensuite, il faut trouver une solution particulière yP (x) de l’équation avec le sec-
ond membre. Une seule. Pour y parvenir, il faut du doigté et un peu de technique.Il faut faire des essais en fonction de ce à quoi ressemble le v(t) :
a. Si v(x) est un polynôme, alors il faut essayer un polynôme,
b. Si v(x) = cos(ωx) ou bien v(x) = sin(ωx), alors essayer yP (x) = A cos(x) +B sin(ωx),
c. Si v(x) = eωx, alors essayer yP (x) = Aeωx.
2.5 Fonctions réelles de deux variables réelles
Une fonction réelle de 2 variables réelles est une fonction f : A ⊂ R2 →R : (x, y) 7→ z = f(x, y).Le graphe de f , noté Gr f , est un sous-ensemble de R3 :
Gr f = {(x, y, z) ∈ R3 | (x, y) ∈ A et z = f(x, y)}
Les courbes de niveau de la fonction f sont obtenues en posant f(x, y) = λ.
2.5.1 Limites de fonctions à deux variables
À peu près tout ce qu’une personne de ton âge peut savoir sur les limites àdeux variables se trouve dans la référence [2]. Ici nous n’allons pas entrer dans tousles détails, mais simplement mentionner les quelque techniques les plus courantes.
Théorème 1.Soient deux fonctions f : Rn → Rp et g : Rp → Rq. Si a est un point adhérent au

2.5. FONCTIONS RÉELLES DE DEUX VARIABLES RÉELLES 17
domaine de g ◦ f et silimx→a
f(x) = b
limy→b
g(y) = c,(2.28)
alorslimx→a
(g ◦ f)(x) = c. (2.29)
Les techniques usuelles sont
a. La règle de l’étau. Cette technique demande un peu plus d’imagination parcequ’il faut penser à un «truc» différent pour chaque exercice. En revanche, lajustification est facile : il y a un théorème qui dit que ça marche.
b. Lorsqu’on applique la règle de l’étau, penser à
|x| =√
x2 ≤√
x2 + y2. (2.30)
Cela permet de majorer le numérateur. Attention : ce genre de majorationne fonctionnent qu’au numérateur : agrandir le dénominateur ferait diminuerla fraction.
c. Il n’est pas vrai que
|x| =√
x2 ≤√
x4 ≤√
x4 + 2y4. (2.31)
En effet, si x est petit, alors x2 > x4, et non le contraire.
Une technique très efficace pour les limites (x, y) → (0, 0) est le passage auxcoordonnées polaires. Il s’agit de poser
{
x = r cos(θ) (2.32a)
y = r sin(θ) (2.32b)
et puis de faire la limite r → 0.Si la limite obtenue ne dépend pas de θ, alors c’est la limite cherchée. Des
exemples sont donnés dans les corrections de l’exercice 41.
2.5.2 Dérivées partielles
La dérivée partielle par rapport à x au point (x, y) est notée
∂f
∂x(x, y) (2.33)
et se calcule en dérivant f par rapport à x en considérant que y est constante.

18 CHAPITRE 2. RAPPELS THÉORIQUES
De la même manière, la dérivée partielle par rapport à y au point (x, y) estnotée
∂f
∂y(x, y) (2.34)
et se calcule en dérivant f par rapport à y en considérant que x est constante.Pour les dérivées partielles secondes,– f ′′
xx(x, y) = (f ′x)′
x = ∂2f∂x2 (x, y) = ∂
∂x(∂f
∂x).
– f ′′yy(x, y) = (f ′
y)′y = ∂2f
∂y2 (x, y) = ∂∂y
(∂f∂y
).
– f ′′xy(x, y) = (f ′
x)′y = (f ′
y)′x = f ′′
yx(x, y) ou ∂2f∂x∂y
(x, y) = ∂∂x
(∂f∂y
) = ∂∂y
(∂f∂x
) =∂2f
∂y∂x(x, y).
2.5.3 Différentielle et accroissement
La différentielle totale de f au point (a, b) est donnée, quand elle existe ( !),par la formule
df(a, b) =∂f
∂x(a, b)dx +
∂f
∂y(a, b)dy. (2.35)
De la même façon que la formule des accroissements finis disait que f(x + a) ≃f(x) + af ′(x), en deux dimensions nous avons que l’accroissement approximatifde f au point (a, b) pour des accroissements ∆x et ∆y est
f(x + ∆x, y + ∆y) = f(x, y) + ∆x∂f
∂x(x, y) + ∆y
∂f
∂y(x, y). (2.36)
Le plan tangent au graphe de f au point(
a, b, f(a, b))
est
T(a,b)(x, y) = f(a, b) +∂f
∂x(a, b)(x − a) +
∂f
∂y(a, b)(y − b) (2.37)
Essayez d’écrire l’équation de la droite tangente au graphe de f(x) au point x = aen terme de la dérivée de f , et comparez votre résultat à cette formule.
Un des principaux théorèmes pour tester la différentiabilité d’une fonction estle suivant.
Théorème 2.Soit une fonction f : Rm → Rp. Si les dérivées partielles existent dans un voisinagede a et donc continues en a, alors f est différentiable en a.
Le plus souvent, nous prouvons qu’une fonction est différentiable en calculantles dérivées partielles et en montrant qu’elles sont continues.

2.6. MÉTHODE DE GAUSS POUR RÉSOUDRE DES SYSTÈMES D’ÉQUATIONS LINÉAIRES19
2.5.4 Recherche d’extrema locaux
(ULB : Théorème 13.8.3 p. 168)
a. Rechercher les points critiques, càd les (x, y) tels que
∂f∂x
(x, y) = 0∂f∂y
(x, y) = 0
En effet, si (x0, y0) est un extrémum local de f , alors ∂f∂x
(x0, y0) = 0 =∂f∂y
(x0, y0).
b. Déterminer la nature des points critiques : «test» des dérivées secondes :
On pose H(x0, y0) =∂2f
∂x2(x0, y0)
∂f 2
∂y2(x0, y0) −
(
∂2f
∂x∂y(x0, y0)
)2
(a) Si H(x0, y0) > 0 et ∂2f∂x2 (x0, y0) > 0 =⇒ (x0, y0) est un minimum local
de f .
(b) Si H(x0, y0) > 0 et ∂2f∂x2 (x0, y0) < 0 =⇒ (x0, y0) est un maximum local
de f .
(c) Si H(x0, y0) < 0 =⇒ f a un point de selle en (x0, y0).
(d) Si H(x0, y0) = 0 =⇒ on ne peut rien conclure.
Dérivation implicite : Soit F (x, f(x)) = 0 la représentation implicite d’unefonction y = f(x) alors
y′ = f ′(x) = −F ′x
F ′y
.
2.6 Méthode de Gauss pour résoudre des sys-tèmes d’équations linéaires
Pour résoudre un système d’équations linéaires, on procède comme suit :
a. Écrire le système sous forme matricielle.
p.ex.
2x + 3y = 5
x + 2y = 4⇔(
2 3 51 2 4
)
b. Se ramener à une matrice avec un maximum de 0 dans la partie de gaucheen utilisant les transformations admissibles :

20 CHAPITRE 2. RAPPELS THÉORIQUES
(a) Remplacer une ligne par elle-même + un multiple d’une autre ;
p.ex.
(
2 3 51 2 4
)
L1−2.L2 7→L′1=⇒(
0 −1 −31 2 4
)
(b) Remplacer une ligne par un multiple d’elle-même ;
p.ex.
(
0 −1 −31 2 4
)
−L1 7→L′1=⇒(
0 1 31 2 4
)
(c) Permuter des lignes.
p.ex.
(
0 1 31 0 −2
)
L1 7→L′2 et L2 7→L′
1=⇒(
1 0 −20 1 3
)
c. Retransformer la matrice obtenue en système d’équations.
p.ex.
(
1 0 −20 1 3
)
⇔
x = −2
y = 3
Remarques :– Si on obtient une ligne de zéros, on peut l’enlever :
p.ex.
3 4 −2 24 −1 3 00 0 0 0
⇔
(
3 4 −2 24 −1 3 0
)
– Si on obtient une ligne de zéros suivie d’un nombre non-nul, le systèmed’équations n’a pas de solution :
p.ex.
3 4 −2 24 −1 3 00 0 0 7
⇔
· · ·· · ·0x + 0y + 0z = 7
⇒ Impossible
– Si on moins d’équations que d’inconnues, alors il y a une infinité de solutionsqui dépendent d’un ou plusieurs paramètres :
p.ex.
(
1 0 −2 20 1 3 0
)
⇔
x − 2z = 2
y + 3z = 0⇔
x = 2 + 2λ
y = −3λ
z = λ

2.7. MATRICES, APPLICATIONS LINÉAIRES ET DIRECTIONS CONSERVÉES21
2.7 Matrices, applications linéaires et directionsconservées
Nous savons qu’une application linéaire A : R3 → R3 est complètement définiepar la donnée de son action sur les trois vecteurs de base, c’est à dire par la donnéede
Ae1, Ae2 et Ae3. (2.38)
Nous allons former la matrice de A en mettant simplement les vecteurs Ae1, Ae2
et Ae3 en colonne. Donc la matrice
A =
3 0 00 1 00 1 0
(2.39)
signifie que l’application linéaire A envoie le vecteur e1 sur
300
, le vecteur e2 sur
001
et le vecteur e3 sur
010
. Pour savoir comment A agit sur n’importe quel
vecteur, on applique la règle de produit vecteur×matrice :
1 2 34 5 67 8 9
xyz
=
x + 2y + 3z4x + 5y + 6z7x + 8y + 9z
. (2.40)
Une chose intéressante est de savoir quelles sont les directions invariantes dela transformation linéaire. Par exemple, on peut lire sur la matrice (2.39) que la
direction
100
est invariante : elle est simplement multipliée par 3. Dans cette
direction, la transformation est juste une dilatation. Affin de savoir si v est unvecteur d’une direction conservée, il faut voir si il existe un nombre λ tel queAv = λv, c’est à dire voir si v est simplement dilaté.
L’équation Av = λv se récrit (A − λ1)v = 0, c’est à dire qu’il faut résoudrel’équation
(A − λ1)
xyz
=
000
. (2.41)
Nous savons qu’une telle équation ne peut avoir de solutions que si det(A−λ1) = 0.La première étape est donc de trouver les λ qui vérifient cette condition.

22 CHAPITRE 2. RAPPELS THÉORIQUES
2.7.1 Comment trouver la matrice d’une symétrie donnée ?
Ceci est une FAQ (Faut Avoir Quompri).
Symétrie par rapport à un plan
Comment trouver par exemple la matrice A qui donne la symétrie autour duplan z = 0 ? La définition d’une telle symétrie est que les vecteurs du plan z = 0ne bougent pas, tandis que les vecteurs perpendiculaires changent de signe. Cesinformations vont permettre de trouver comment A agit sur une base de R3. Eneffet :
a. Le vecteur
100
est dans le plan z = 0, donc il ne bouge pas,
b. le vecteur
010
est également dans le plan, donc il ne bouge pas non plus,
c. et le vecteur
001
est perpendiculaire au plan z = 0, donc il va changer de
signe.
Cela nous donne directement les valeurs de A sur la base canonique et nous permetd’écrire
A =
1 0 00 1 00 0 −1
. (2.42)
Pour écrire cela, nous avons juste mit en colonne les images des vecteurs de base.Les deux premiers n’ont pas changé et le troisième a changé.
Et si maintenant on donne un plan moins facile que z = 0 ? Le principe restele même : il faudra trouver deux vecteurs qui sont dans le plan (et dire qu’ils nebougent pas), et puis un vecteur qui est perpendiculaire au plan 1, et dire qu’ilchange de signe.
Voyons ce qu’il en est pour le plan x = −z. Il faut trouver deux vecteurslinéairement indépendants dans ce plan. Prenons par exemple
f1 =
010
, f2 =
10
−1
. (2.43)
1. pour le trouver, penser au produit vectoriel

2.7. MATRICES, APPLICATIONS LINÉAIRES ET DIRECTIONS CONSERVÉES23
Nous avonsAf1 = f1
Af2 = f2.(2.44)
Afin de trouver un vecteur perpendiculaire au plan, calculons le produit vectoriel :
f3 = f1 × f2 =
∣∣∣∣∣∣∣
e1 e2 e3
0 1 01 0 −1
∣∣∣∣∣∣∣
= −e1 − e3 =
−10
−1
. (2.45)
Nous avonsAf3 = −f3. (2.46)
Afin de trouver la matrice A, il faut trouver Ae1, Ae2 et Ae3. Pour ce faire, ilfaut d’abord écrire {e1, e2, e3} en fonction de {f1, f2, f3}. La première des équation(2.43) dit que
f1 = e2. (2.47)
Ensuite, nous avonsf2 = e1 − e3
f3 = −e1 − e3.(2.48)
La somme de ces deux équations donne −2e3 = f2 + f3, c’est à dire
e3 = −f2 + f3
2(2.49)
Et enfin, nous avons
e1 =f2 − f3
2. (2.50)
Maintenant nous pouvons calculer les images de e1, e2 et e3 en faisant
Ae1 =Af2 − Af3
2=
12
00
−2
=
00
−1
,
Ae2 = Af1 = f1 =
010
,
Ae3 = −f2 − f3
2= −1
2
200
=
−100
.
(2.51)
La matrice A s’écrit maintenant en mettant les trois images trouvées en colonnes :
A =
0 0 −10 1 0
−1 0 0
. (2.52)

24 CHAPITRE 2. RAPPELS THÉORIQUES
Symétrie par rapport à une droite
Le principe est exactement le même : il faut trouver trois vecteurs f1, f2 et f3
sur lesquels on connaît l’action de la symétrie. Ensuite il faudra exprimer e1, e2 ete3 en termes de f1, f2 et f3.
Le seul problème est de trouver les trois vecteurs fi. Le premier est tout trouvé :c’est n’importe quel vecteur sur la droite. Pour les deux autres, il faut un peuruser parce qu’il faut impérativement qu’ils soient perpendiculaire à la droite.Pour trouver f2, on peut écrire
f2 =
10x
, (2.53)
et puis fixer le x pour que le produit scalaire de f2 avec f1 soit nul. Si il n’y a
pas moyen (genre si f1 a sa troisième composante nulle), essayer avec
x10
. Une
fois que f2 est trouvé (il y a des milliards de choix possibles), trouver f3 est superfacile : prendre le produit vectoriel entre f1 et f2.
En résumé
La marche à suivre est
a. Trouver trois vecteurs f1, f2 et f3 sur lesquels on connaît l’action de lasymétrie. Typiquement : des vecteurs qui sont sur l’axe ou le plan de symétrie,et puis des perpendiculaires. Pour la perpendiculaire, penser au produitscalaire et au produit vectoriel.
b. Exprimer la base canonique e1, e2 et e3 en termes de f1, f2, f3.
c. Trouver Ae1, Ae2 et Ae3 en utilisant leur expression en termes des fi, et lefait que l’on connaisse l’action de A sur les fi.
d. La matrice s’obtient en mettant les images des ei en colonnes.
2.8 Orthogonalité
Proposition 3.si v1, · · · , vk sont des vecteurs non nuls, orthogonaux deux à deux, alors ces vecteursforment une famille libre.

Chapitre 3
Analyse
3.1 Limites
Exercice 1.Calculer les limites suivantes (0
0, ∞
∞ , ∞ − ∞,0 · ∞).
a. limx→2x2+x−6
x2−4.
b. limx→ π4
1−tan(x)cos(2x)
.
c. limx→ π2
sec(x)tan(x)
.
d. limx→0x4−2x3
2x−sin(2x).
e. limx→±∞x√
1+x2 .
f. limx→0ax−bx
x.
g. limx→0ex−e−x
sin(x).
h. limx→1
(x
x−1− 1
ln(x)
)
.
i. limx→0ex−esin(x)
x−sin(x).
j. limx→0x+sin(2x)x−sin(2x)
.
k. limx→0
(1
sin(x)− cos(x)
sin(x)
)
.
l. limx→0
√x+9−3
x.
m. limx→0tan(x)
x.
n. limx→>0 xm ln(x).
o. limx→<π2
(
tan(3x) − tan(x))
.
p. limx→∞ x sin(a/x).
q. limx→ π2
ln
(
sin(x)
)
(π−2x)2 .
Ici, a et b sont des réels positifs, et m est un entier positif.Corrigé à la page 85.
Exercice 2.Calculer les limites suivantes (1∞, ∞0, 00).
a. limx→0 cos(x)cotg(x)
b. limx→1(2 − x)1/(x−1)
c. limx→>1
(1x
)tan(x)
d. limx→>0(2 cos(x) − ex)ln(x)
e. limx→>0 xsin(x)
f. limx→>0
(
sin(x))sin(x)
25

26 CHAPITRE 3. ANALYSE
g. limx→0(ex + x)1/x
h. limx→∞(x2 + x + 1)1/x
i. limx→>0 x2x
j. limx→∞(
2x
+ 1)x
k. limx→1 ln(x)(x−1)
l. limx→<π2(tan x)cos(x)
m. limx→>0 cotg(x) 1ln(x)
n. limx→∞(
cos(ax) + β sin(a
x))x
.
Corrigé à la page 86.
3.2 Dérivées et optimisation
Exercice 3.Déterminer les extréma des fonctions suivantes :
a. y = 2 sin(x) + cos(2x)
b. y = x2 + 250/x
c. y = ex/x.
Corrigé à la page 88.
Exercice 4.Que vaut la dérivée de la fonction y = 2 ln2
(
(2x)2)
?Corrigé à la page 88.
Exercice 5.La fonction xx avec x > 0 possède un minimum. Donner la position de ce minimum.
Corrigé à la page 89.
Exercice 6.Dans le plan euclidien, on considère le point c = (3, 5). Par ce point, on trace unedroite D qui coupe l’axe Ox en un point a d’abscisse positive et l’axe Oy en unpoint b d’ordonnée positive.
Comment doit être le droite D pour que le triangle Oab ait une aire minimum ?(interrogation de janvier 1973)
Corrigé à la page 89.
Exercice 7.Un bateau mouille l’ancre à 3 km du rivage. En face d’un point situé 4 km plus loinle long de la côte, un autre bateau est ancré à 9 km du rivage. Un canot du premierbateau doit conduire un passager au rivage et aller ensuite rejoindre l’autre bateau.Quel est le trajet minimum du canot ?
Corrigé à la page 89.

3.3. PRIMITIVES ET INTÉGRATION 27
3.3 Primitives et intégration
Exercice 8.Calculer les primitives suivantes (exercice 1, page 40)
1.∫
(x +√
x)dx
2.∫ ( 3√
x− x
√x
4
)
dx
3.∫ dx
4√
x
4.∫ 1
3x−7dx
5.∫
tan(2x)dx
6.∫ 1
cos2(7x)dx
7.∫
cotg(x/3)dx
8.∫
e− sin(x) cos(x)dx
9.∫
tan(x) sec2(x)dx
10.∫ x√
2x2+3dx
11.∫ arctg(x)
1+x2 dx
12.∫ cos(x)
16+sin2(x)dx
13.∫ 1
x ln(x)dx
14.∫ 1√
9−x2 dx
15.∫ 1
4−9x2 dx
16.∫ 1√
x2+9dx
17.∫ 1
x√
1−ln2(x)dx
18.∫ sin(2x)√
1+cos2(x)dx
19.∫ ex√
1−e2x dx
20.∫ arccos2(x)√
1−x2 dx
21.∫
2x2xdx
22.∫ x√
1−x4 dx
23.∫ ex
1+e2x dx
24.∫ 1
a2x2−b2 dx
25.∫ 1
cos2(x)√
tan(x)−1dx
26.∫ cos(ln(x))
xdx
27.∫ ex/2√
ex−1
28.∫ √ ex
1−ex dx
29.∫ 5x4+3
cos2(x5+3x)dx
30.∫
√1+ln(x)
xdx
31.∫ 1−arctg(x)
1+x2 dx
32.∫
cotg(x) ln(
sin(x))
dx
33.∫
x2(1 − x3)2dx
Corrigé à la page 90.
Exercice 9.Quelque fractions rationnelles à intégrer (exercice 2.1, page 41, numéros 1, 2 et10).
a.∫ dx
3x2−2x+4
b.∫ 1
x2+3x+1dx
c.∫ 3x+1
1−4x2 dx
d.∫ 7x+1
6x2+x−1dx
Corrigé à la page 95.
Exercice 10.Quelque intégrations par partie (exercice 3, page 42).
a.∫
xexdx
b.∫
x2 ln(x)dx
c.∫
arcsin(x)dx
d.∫
ex sin(x)dx

28 CHAPITRE 3. ANALYSE
Corrigé à la page 96.
Exercice 11.Exercice 5, page 47. Soit f(x), une fonction définie et dérivable sur [a, b]. Déter-miner
a.∫ b
a f ′(x)dx,
b. la dérivée au point t = b de la fonction
F (t) =∫ t
af ′(x)dx, (3.1)
c. la dérivée au point t = b de la fonction
F (t) =∫ t
af(x)dx. (3.2)
Corrigé à la page 97.
Exercice 12.Exercice 6, page 48. Soit F (x) =
∫ x−∞ e−t2
dt. Parmi les affirmations suivantes,lesquelles sont vraies ? Justifier.
a. F est croissanteb. F est décroissantec. F n’est ni croissante ni décrois-
santed. F ne s’annule jamaise. F est impaire
f. F est paire
g. F admet un maximum en x = 0
h. F admet un minimum en x = 0
i. F admet un point d’inflexion enx = 0.
Classer par ordre croissant les nombres suivants :
0, 1,∫ 3
2e−x2
dx,∫ 1
0e−x2
dx,∫ −2
−3e−x2
dx. (3.3)
Corrigé à la page 98.
Exercice 13.Exercice 1, page 49. Calculer l’aire de la surface comprise entre les deux parabolesy = 6x − x2 et y = x2 − 2x.
Corrigé à la page 98.
Exercice 14.Exercice 2, page 49. Calculer l’aire de la surface comprise entre les courbes xy = 12et x + y = 8.
Corrigé à la page 99.

3.3. PRIMITIVES ET INTÉGRATION 29
Exercice 15.Exercice 2, page 49. Calculer l’aire de la surface comprise entre les deux courbesx2 + y2 = 4 et x2 + y2 = 4x.
Corrigé à la page 99.
Exercice 16.Exercice 13, page 49. Calculer le volume du solide engendré par la rotation autourde Ox de la surface comprise entre la courbe y =
√xex, l’axe Ox et la droite x = 1.
Corrigé à la page 100.
Exercice 17.Exercice 14, page 50. Quel est le volume du solide engendré par la rotation autourde Ox de la surface située dans le premier quadrant entre le système d’axe et lacourbe y = 2−x. Pour quelle section perpendiculaire à l’axe Ox ce volume sera-t-ilpartagé en deux parties égales ?
Corrigé à la page 100.
Exercice 18.Exercice 17, page 50. La parabole d’équation y = x2/3 partage le disque d’équationx2 + y2 ≤ 4 en deux régions. Calculer le volume de révolution engendré par la pluspetite de ces régions
a. autour de l’axe Ox,
b. autour de l’axe Oy.
Corrigé à la page 101.
3.3.1 Longueur d’un arc de courbe
Exercice 19.Exercice 23, page 51. Calculer la longueur des arcs de courbe suivants.
a. y = ln(1 − x2) pour 0 ≤ x ≤ 12
b. y = x3/2 pour 0 ≤ x ≤ 5
c. y = ln(x) pour 1 ≤ x ≤ 2√
2.
Corrigé à la page 101.
Exercice 20.Exercice 27, page 51. Déterminer a pour que la longueur d’arc de la cycloïde
x = a(t − sin t)
y = a(1 − cos t)(3.4)
vaille 8. Astuce : penser aux petites formules de trigonométrie pour vous simplifierla vie.

30 CHAPITRE 3. ANALYSE
Corrigé à la page 102.
3.3.2 Aire d’une surface de révolution
Exercice 21.Exercice 36, page 52. Trouver l’aire du cône engendré par la rotation du segmentde droite y = 2x autour de Ox pour 0 ≤ x ≤ 2.
Corrigé à la page 103.
Exercice 22.Trouver l’aire des surfaces engendrées par la rotation des arcs de courbes suivants
a. 4y = x3 pour 0 ≤ x ≤ 1, autour de Ox
b. y2 + 4x = 2 ln(y) pour 1 ≤ y ≤ 3 autour de Oy.
Corrigé à la page 103.
Exercice 23.Soit y = 1/x avec x ≥ 1. Calculer l’aire sous la courbe et le volume de révolution ;en déduire que pour peindre la surface plane (infinie), il suffit de remplir le volume(fini) . . . et qu’on peut même récupérer une grande partie de la peinture après. Oùest l’erreur ?
Corrigé à la page 104.
3.4 Équations différentielles
3.4.1 Équations à variables séparées
Exercice 24.Résoudre les équations suivantes pour y(x).
a. y′√1 − x2 + xy = 0,
b. (1 − y2)dy − ydx = 0.
Corrigé à la page 105.
3.4.2 Équations homogènes
Exercice 25.Résoudre les équations suivantes.
a. 4ydy + xdy = 0.
b. (2x + 3y)dx + (x − y)dy = 0,
Corrigé à la page 106.

3.4. ÉQUATIONS DIFFÉRENTIELLES 31
3.4.3 Équations linéaires
Exercice 26.Résoudre les équations suivantes.
a. y′ + 2xy = 4x
b. (x − 2)y′ = y + 2(x − 2)2
c. y′ + y cotg(x) = 5ecos(x), avec la condition initiale x0 = π2, y0 = −4.
Corrigé à la page 107.
3.4.4 Problèmes divers
Exercice 27.Soit l’équation différentielle
dy
dx+ yf(x) = sin(x). (3.5)
a. Déterminer f(x) de telle manière à ce que cette équation accepte y = cos(x)comme solution particulière.
b. Quelle est la solution générale de l’équation différentielle obtenue en rem-plaçant f(x) par la fonction obtenue ?
c. Quelle est la solution particulière qui admet un extremum en un point d’ab-scisse π
4?
Corrigé à la page 108.
Exercice 28.Déterminer, sans résoudre l’équation, le lieu des minima et maxima des solutionsde
y′ = xy − 1. (3.6)
Montrer que toutes les courbes solutions coupent les axes sous un angle constant.Corrigé à la page 109.
Exercice 29.Dans quelle région du plan les fonctions solutions de l’équation différentielle
y′ = sin(x2 + y2) (3.7)
sont-elles croissantes, décroissantes ?Corrigé à la page 109.

32 CHAPITRE 3. ANALYSE
Exercice 30.Montrer que la substitution y = t/x réduit l’équation différentielle
y(1 − xy)dx − x(1 + xy)dy = 0 (3.8)
à une équation à variables séparables. Résoudre cette équation.Corrigé à la page 109.
Exercice 31.Chercher la solution de l’équation
y′ +y
1 + x= x (3.9)
telle que y′(0) = 1.Corrigé à la page 111.
Exercice 32.En tout point d’une courbe d’équation y = y(x), le carré de la pente de la tangenteest égal au produit de l’abscisse et de l’ordonnée du point. Trouver l’équation decette courbe, sachant qu’elle passe par le point (1, 1).
Corrigé à la page 112.
3.4.5 Équations différentielles du second ordre
Exercice 33.Exercice II.1, page 59. Déterminer la solution générale de chacune des équationsdifférentielles suivantes.
a. y′′ − 2y′ − 3y = 0
b. y′′ + 4y′ + 4y = 0
c. y′′ − 4y′ + 5y = 0
d. y′′ − 4y′ + 3y = 0
e. 2y′′ − y′ = 0
f. y′′ + 4y = 0
g. y′′ + y′ + y = 0
h. y′′ + 2y′ + y = 0
i. y′′ − 7y′ + 10y = 0
j. 4y′′ + 12y′ + 9y = 0
Corrigé à la page 112.
Exercice 34.Exercice II.2, page 59. Pour chacune des équations différentielles suivantes, déter-miner la solution particulière répondant aux conditions initiales indiquées.
a. y′′ + 10y′ + 16y = 0, CI : x0 = 0, y0 = 1, y′0 = −12
b. y′′ − 6y′ + 10y = 0, CI : x0 = 0, y0 = 1, y′0 = 4

3.4. ÉQUATIONS DIFFÉRENTIELLES 33
c. y′′ + 9y = 0, CI : x0 = π3, y0 = 0, y′
0 = 1
d. y′′ − 6y′ + 9y = 0, CI : x0 = 13, y0 = 0, y′
0 = e.
Corrigé à la page 114.
Exercice 35.Exercice II.3, page 59. Déterminer la solution générale de chacune des équationsdifférentielles suivantes :
a. y′′ − 5y′ + 4y = 3 − 2x
b. y′′ − 6y′ + 13y = 39
c. y′′ − 2y′ + y = 6ex
d. y′′ + 4y = cos(2x)
Corrigé à la page 115.
Exercice 36.Exercice 6, page 60. Déterminer la courbe solution de chacune des équations dif-férentielles suivantes, répondant aux conditions imposées.
a. y′′ − 2y′ = 2x. On demande que la tangente au point (0, 2) soit parallèle àl’axe des abscisses.
b. y′′ − 6y′ + 9y = x2e3x.
(a) la tangente au point (0, 1) a un coefficient angulaire nul,
(b) la tangente au point (1, 0) a une pente égale à e3/4.
Corrigé à la page 117.
Exercice 37.Quelle est la courbe passant par l’origine et admettant en chaque point une penteégale au triple de l’abscisse du point ?
Corrigé à la page 119.
Exercice 38.Déterminer les fonctions nulles à l’origine et telles que leur dérivée première soitégale à l’opposé de la dérivée seconde.
Corrigé à la page 119.
Exercice 39.En tout point d’une courbe, l’angle formé par la tangente en ce point et l’axedes abscisses est complémentaire de l’angle formé par la droite joignant le point àl’origine et l’axe des abscisses. Quelles sont ces courbes ?
Corrigé à la page 119.

34 CHAPITRE 3. ANALYSE
3.5 Fonctions de deux variables réelles
3.5.1 Tracer
Exercice 40.Représenter les courbes de niveaux des surfaces suivantes correspondant aux cotesz = 0, z = 1, z = −1, z = h.
a. z2 = x2 + y2
b. x + y + z = 5c. z = xy
d. z = x2 + y2
e. 4x2 + y2 = 4.
Corrigé à la page 120.
3.5.2 Limites à deux variables
Exercice 41.(INGE1121 8.1) Calculer les limites suivantes :
a. lim(x,y)→(0,0)x−yx+y
b. lim(x,y)→(0,0)(xy)2
(x+y)2+(x−y)2
c. lim(x,y)→(0,0)xy3
x2+y2
d. lim(x,y)→(0,0)x sin(y)√
x2+y2
Corrigé à la page 120.
Exercice 42.(INGE1121, 8.2) L’énoncé suivant est-il vrai ou faux ? Justifier.
Si la limite en (a, b) de f(x, y) existe sur une infinité de chemins différentspassant par (a, b) et vaut chaque fois le même nombre ℓ, alors lim(x,y)→(a,b) f(x, y)existe et vaut ℓ.
Corrigé à la page 121.
Exercice 43.(INGE1121 8.3) Étudier la continuité des fonctions suivantes :
a.
f(x, y) =
2xyx2+y2 si (x, y) 6= (0, 0)
0 si (x, y) = (0, 0)(3.10)
b.
f(x, y) =
y2−x2
y4+x2 si (x, y) 6= (0, 0)
0 si (x, y) = (0, 0)(3.11)

3.5. FONCTIONS DE DEUX VARIABLES RÉELLES 35
c.
f(x, y) =
y cos( 1y) si y 6= 0
0 si y = 0(3.12)
Corrigé à la page 122.
Exercice 44.(INGE 1121, 8.4) Dessiner les courbes de niveau de la fonction
f(x, y) =x2
y(3.13)
et calculer lim(x,y)→(0,0) f(x, y).Corrigé à la page 122.
Exercice 45.(INGE 1121, 8.5) Calculer
lim(x,y)→(0,0)
sin(x)xy
. (3.14)
Corrigé à la page 123.
Exercice 46.(INGE 1121, 8.6) Calculer
lim(x,y)→(0,0)
sin(√
x2 + y2)
ln(√
x2 + y2)
. (3.15)
Corrigé à la page 123.
Exercice 47.(INGE 1121 8.7) Soit la fonction
f(x, y) =x2 + y2
x + y. (3.16)
a. Donner le domaine de définition de f ,
b. montrer que les courbes de niveau sont des cercles et esquisser les graphesdes courbes de niveau de hauteur −2, −1, 1 et 2,
c. calculer la limite de f lorsque (x, y) tend vers (0, 0).
Corrigé à la page 124.
Exercice 48.(INGE1121, 8.8)Calculer les limites suivantes ou monter qu’elles n’existent pas.

36 CHAPITRE 3. ANALYSE
a.
lim(x,y)→(0,0)
2xy2
x4 + 2y4.
b.lim
(x,y)→(2,3)
x + y
2 − y
c.lim
(x,y,z)→(0,0,0)
2xy + yz
x2 + y2 + z2.
d.lim
(x,y)→( π2
,2)
xy + 12 + cos(x)
.
e.
lim(x,y,z)→(0,0,0)
2x2 + y2 − z2
x2 + y2 + z2
f.
lim(x,y)→(1,−1)
y2 + x
(x − 1)(y + 2)g.
lim(x,y,z)→(0,0,0)
x2 + y3 + 2z3
xyz2.
h.
lim(x,y)→(0,0)
x4 − y4
x2 + y2.
i.
lim(x,y)→(0,0)
xy2
x2 + 2y2.
j.
lim(x,y)→(0,0)
x3 − 2x2y + 3y2x − y3
x2 + y2.
k.
lim(x,y)→(0,0)
x2y3
y5 − x5.
l.
lim(x,y,z)→(0,0,0)
x2 − z2
x3 − z3.
m.lim
(x,y)→(1,−1)e−xy2
.
n.lim
(x,y)→(0,0)ln√
1 − x2 − y2
o.
lim(x,y)→(0,0)
x2 − 2xy + 2y2
x2 + 2y2.
p.
lim(x,y)→(2,−1)
ln1 + x + 3y
3y2 − x
q.
lim(x,y)→(0,0)
exy sin2(xy)xy
.
r.
lim(x,y)→(−2,1)
x2 − 4x + 4xy + 2y − x − 2
s.
lim(x,y)→(0,0)
exp
(
−1x2 + y2
)
Corrigé à la page 125.
3.5.3 Dérivées partielles, différentielles totales
Exercice 49.Calculer les dérivées partielles ∂xf , ∂yf , ∂2
xf , ∂2xyf , ∂2
yxf et ∂2yf des fonctions
suivantes.

3.5. FONCTIONS DE DEUX VARIABLES RÉELLES 37
a. 2x3 + 3x2y − 2y2
b. ln(xy2)
c. tan(x/y)
d. xy2
x+y
Corrigé à la page 129.
Exercice 50.Si z = x2y − 3y, calculer ∆z et dz.
Corrigé à la page 131.
3.5.4 Différentiabilité, accroissements finis
Exercice 51.(INGE1121, 9.1) Étudier la différentiabilité en (0, 0) des fonctions suivantes
a.
f(x, y) =
8x3y3
4x2+y2 si (x, y) 6= (0, 0)
0 si (x, y) = (0, 0)(3.17)
b.
f(x, y) =
x3−y3
x2+y2 si (x, y) 6= (0, 0)
0 si (x, y) = (0, 0)(3.18)
c.
f(x, y) =
x ln√
x2 + y2 si (x, y) 6= (0, 0)
0 si (x, y) = (0, 0)(3.19)
Corrigé à la page 131.
Exercice 52.Soit la fonction
f(x, y) =
x2ya
(x2+y2)2 si (x, y) 6= (0, 0)
0 sinon.(3.20)
Prouver que f admet des dérivées partielles seulement si a > 0.Corrigé à la page 131.
Exercice 53.(INGE1121, 9.2) Démontrer que les fonctions suivantes sont différentiables sur leurdomaine de définition.
a.f(x, y) =
xy
y2 − x2(3.21)

38 CHAPITRE 3. ANALYSE
b.f(x, y, z) =
xyz
x − y. (3.22)
Corrigé à la page 132.
Exercice 54.(INGE1121 9.3) Soit la fonction f de R2 dans R3 définie par
f(x, y) =(
y sin(x), exy2, x2y)
. (3.23)
a. Donner la matrice jacobienne de f .
b. Calculer f(0, 1) et utiliser la jacobienne pour approcher f(0.01, 1.02).
Corrigé à la page 132.
Exercice 55.(INGE1121, 9.4) Donner la jacobienne des fonctions suivantes
a.f(x, y) = xy sin(xy) (3.24)
b.f(x, y) = 4x − 5y (3.25)
c.f(x, y) =
x
2x + 5x(3.26)
d.f(x, y, z) =
xy
z(3.27)
Corrigé à la page 133.
Exercice 56.(INGE1121, 9.5) Pour la fonction
g(u, v, w) = uv − (cos u)v + u2w, (3.28)
donner une approximation de g(r, 1 + s, t) pour r, s et t petits.Corrigé à la page 133.
Exercice 57.(INGE1121, 9.6) Pour chacune des fonctions suivantes, déterminer la dérivée di-rectionnelle au point P dans la direction du vecteur u.
a. f(x, y) = 2x + y, P − (3, 1), v = (2, −3).
b.

3.5. FONCTIONS DE DEUX VARIABLES RÉELLES 39
c.
d. f(x, y) = x ln(y), P = (2, 2), (1, −1).
e. f(x, y, z) = sin(xyz), P = (π, 1, 1), v = (2, 1, 2).
Corrigé à la page 133.
Exercice 58.(INGE1121, 9.7) Soit f une fonction de classe C1 vérifiant f(x, y) = f(y, x) pourtout x, y ∈ R. Montrer au moyen d’un exemple que l’une des égalités suivantes estfausse, et démontrer l’autre :
∂f
∂x(a, b) =
∂f
∂x(b, a) (3.29a)
∂f
∂x(a, b) =
∂f
∂y(b, a) (3.29b)
(3.29c)
Corrigé à la page 134.
Exercice 59.(INGE1121, 9.8) La production d’une société est donnée par Q(K, L) = 60K1/2L1/3,où K représente le capital investi (une unité correspondant à 1000 euros) et oùL désigne le travail mesuré en heures de travail. On suppose que K = 900.000 etL = 1000. Estimer l’effet de l’addition de 1000 euros au capital.
Corrigé à la page 135.
3.5.5 Plan tangent
Exercice 60.(INGE1121, 9.10) Chercher les équations du plan tangent et de la droite normaleau point P aux graphes de la fonction f dans les cas suivants
a. f(x, y) = 4x2 + 9y2, avec P = (−2, −1, 25)
b. f(x, y) = 2e−x cos(y) avec P = (0, π3, 1)
c. f(x, y) = ln x+y2y
avec P = (0, 2, ln(1/2)).
Corrigé à la page 135.
Exercice 61.(INGE1121, 9.11) En quels points de la surface z = 4x2 + 9y2 la normale est-elleparallèle à la droite passant par les deux points P = (−2, 4, 3) et Q = (5, −1, 2) ?
Corrigé à la page 137.

40 CHAPITRE 3. ANALYSE
3.5.6 Dérivées de fonctions composées
Exercice 62.(INGE1121, 9.12) Calculer ∂w
∂xet ∂w
∂ydans les cas suivants :
a. w = u cos(v), u = x2 + y2, v = xy.
b. w = 2uv + 3v2, u = x sin(y), v = y sin(x).
Corrigé à la page 138.
Exercice 63.(INGE1121, 9.13) Calculer ∂w
∂ret ∂w
∂sdans les cas suivants :
a. w = u2 + uv, u = r2, v = 2r + s,
b. w = exy, y = r + s, x = rs.
Corrigé à la page 139.
Exercice 64.(INGE1121, 9.15) Calculer ∂r
∂u, ∂r
∂vet ∂r
∂tlorsque r = x ln(y), x = 3u+vt et y = uvt.
Corrigé à la page 139.
Exercice 65.(INGE1121, 9.16) Calculer dw/dt dans les cas suivants
a.
b. w = ln(u + v), u = e−t, v = t3 − t2.
c.
Corrigé à la page 139.
Exercice 66.(INGE1121, 9.17) Calculer dz/dt si z = 3x2 + xy + 2 avec x = 3t + sin(t) ety = t3 + t.
Corrigé à la page 140.
Exercice 67.(INGE1121, 9.18)Soit F : R2 → R définie par F (ρ, θ)éf
(
x(ρ, θ), y(ρ, θ))
avec
f(u, v) = ln(u − v)
x(ρ, θ) = ρ cos(θ)
y(ρ, θ) = ρ sin(θ).
(3.30)
a. Calculer ∂F∂ρ
et ∂F∂θ
à la fois par la formule de dérivation des fonctions com-posées, et en explicitant F (ρ, θ).
b. Calculer ∂F∂ρ
(1, 0).

3.5. FONCTIONS DE DEUX VARIABLES RÉELLES 41
Corrigé à la page 140.
Exercice 68.(INGE1121, 9.19) Calculer les dérivées partielles en (0, 0) de la fonction F (x, y) =f(
g(x, y), y)
sachant que
g(0, 0) = 1∂g
∂x(0, 0) = −1
∂g
∂y(0, 0) = 3
f(0, 0) = 2∂f
∂x(0, 0) = −1
∂f
∂y(0, 0) = 7
f(2, 0) = 3∂f
∂x(1, 0) = −2
∂f
∂y(1, 0) = 8
f(0, 2) = 4∂f
∂x(0, 1) = −4
∂f
∂y(0, 1) = 9.
(3.31)
Corrigé à la page 140.
Exercice 69.(INGE1121, 9.20) Si f(x, y) et y = g(x) sont des fonctions de classe C2, déterminerw′(x) = dw
dxet w′′(x) = d
dx
(dwdx
)
(x) sachant que w est la fonction définie par
w(x) = f(
x, g(x))
.Corrigé à la page 141.
3.5.7 Dérivées de fonctions implicites
Exercice 70.Dériver les fonctions implicites suivantes
a. y3 + 2y2 + xy − 4 = 0
Corrigé à la page 142.
Exercice 71.Les surfaces x2y2 +2x+z3 = 16 et 3x2 +y2 −2z = 9 ont le point (2, 1, 2) situé dansleur courbe d’intersection. Quelles sont les équations des plans tangents respectifsaux deux surfaces en ce point ? Quel est l’angle formé par les deux normales ?
Corrigé à la page 142.
Exercice 72.Soit la surface d’équation (x + 1)(y + 1) = z + 1. On demande
a. l’équation du plan tangent à l’origine
b. de décrire l’intersection du plan tangent et de la surface,

42 CHAPITRE 3. ANALYSE
c. la nature de cette surface.
Corrigé à la page 142.
Exercice 73.Écrire les équations de la droite tangente à la courbe
{
3x2y + y2z = 2 (3.32a)
2xz − x2y = 3 (3.32b)
au point (1, −1, 1).Corrigé à la page 142.
3.5.8 Extrema
Exercice 74.Rechercher les points de la surface z2 = x2 +y2 +xy +x+y +1 les plus rapprochésde l’origine.
Corrigé à la page 142.
Exercice 75.Partager le nombre positif a en trois parties telles que leur produit soit maximum.
Corrigé à la page 142.
Exercice 76.(IGNE1121, 10.1) Rechercher les extrema des fonctions suivantes
a. f(x, y) = 2 −√
x2 + y2
b. f(x, y) = x3 + 3xy2 − 15x − 12y
c. f(x, y) = x3
3+ 4y3
3− x2 − 3x − 4y − 3
Corrigé à la page 142.
Exercice 77.(INGE1121, 10.3) Déterminer les valeurs extrêmes et les points de selle des fonc-tions suivantes.
a. f(x, y) = x2 + 4x + y2 − 2y.
b.
c.
d.
e.
f.
g.
h. f(x, y) = ex2+xy.
i.
j.
k.
l.

3.5. FONCTIONS DE DEUX VARIABLES RÉELLES 43
m.
n.
o.
p.
q. f(x, y) = ex sin(y).
r.
s.
t.
Corrigé à la page 145.
Exercice 78.(INGE1121, 10.4) Considérons la fonction
f(x, y) = xy2e−(x2+y2)/4. (3.33)
a. Montrer qu’il y a une infinité de points critiques.
b. Déterminer leur nature.
Corrigé à la page 148.
Exercice 79.Soit la fonction
g(x, y) = (x4 + 1)(2 + cos(y)). (3.34)
Prouver que le point (0, 0) est un point de selle.Corrigé à la page 150.
Exercice 80.(INGE1121, 10.5) Partager le nombre 1000 en trois nombres dont le produit soitmaximum.
Corrigé à la page 150.
Exercice 81.(INGE1121, 10.6) Quelles sont les dimensions d’une boîte parallélépipédique rect-angulaire de volume fixé V dont la surface soit la plus petite possible.
Corrigé à la page 152.
Exercice 82.(INGE1121, 10.9) Notons f(x, y, z) le carré de la distance du point (0, 0, 2) à unpoint de la surface z = xy. Déterminer les extrema locaux.
Corrigé à la page 153.
Exercice 83.(INGE1121, 10.11) Soit f(x, y) = x3 − 3xy2.
a. Montrer que le seul point critique est (0, 0) et déterminer la nature de lamatrice Hessienne en ce point.

44 CHAPITRE 3. ANALYSE
b. Déterminer la nature du point critique en considérant le comportement dela fonction sur les droites passant par l’origine.
Corrigé à la page 155.
3.5.9 Réserve
Exercice 84.<++>
Corrigé à la page 157.
Exercice 85.<++>
Corrigé à la page 157.
Exercice 86.<++>
Corrigé à la page 157.

Chapitre 4
Algèbre linéaire, vecteur etmatrices
4.1 Déterminants et systèmes d’équations
Exercice 87.En n’utilisant que les propriétés des déterminants, démontrer l’égalité
det
1 a a2
1 b b2
1 c c2
. (4.1)
Ce déterminant est le déterminant de Vandermonde.Corrigé à la page 157.
Exercice 88.Calculer les déterminants des matrices suivantes
a =
(
4 53 7
)
b =
(
0 57 2
)
c =
5 3 21 2 36 7 9
d =
1 2 34 5 67 8 9
(4.2)
Corrigé à la page 157.
Exercice 89.
45

46 CHAPITRE 4. ALGÈBRE LINÉAIRE, VECTEUR ET MATRICES
Montrer, sans effectuer, que
det
bc a2 a2
b2 ac b2
c2 c2 ab
= det
bc ab caab ca bcca bc ab
det
a1 + b1 a2 + b2 a3 + b3
b1 + c1 b2 + c2 b3 + c3
c1 + a1 c2 + a2 c3 + a3
= 2 det
a1 a2 a3
b1 b2 b3
c1 c2 c3
.
(4.3)
Corrigé à la page 157.
Exercice 90.Calculer le plus simplement possible
det
a 1 1 1 · · · 1 11 a 1 1 · · · 1 11 1 a 1 · · · 1 1...
......
......
......
1 1 1 1 . . . a 11 1 1 . . . 1 a
(4.4)
Corrigé à la page 157.
Exercice 91.Calculer le déterminant des matrices suivantes.
a. C =
0 0 0 0 0 10 0 0 0 2 10 0 0 3 2 10 0 4 3 2 10 5 4 3 2 16 5 4 3 2 1
.
Corrigé à la page 157.
Exercice 92.Exercice 5, page 85. Résoudre les systèmes
a.
{
x + 2y = 42x + y = 5
b.
x1 + 2x2 + 3x3 = 02x1 + x2 + 3x3 = 03x1 + 2x2 + x3 = 0
c.
x + y + z − 3t = 2x − 2y + 2z + 15t = −3x + y − z − 9t = 0

4.1. DÉTERMINANTS ET SYSTÈMES D’ÉQUATIONS 47
d.
x + 4y + z = 12x + y − z = 02x + y = 4x + z = 4
e.
{
2x + y − 3z − t = 1x − 4y + 3z + 4t = −4
Corrigé à la page 158.
Exercice 93.(INGE1121, 1.1) Résoudre les systèmes d’équations suivants :
a.
x1 − 2x2 + 3x3 − 2x4 = 03x1 − 7x2 − 2x3 + 4x4 = 04x1 + 3x2 + 5x3 + 2x4 = 0
b.
2x1 + x2 − 2x3 + 3x4 = 03x1 + 2x2 − x3 + 3x4 = 43x1 + 3x2 + 3x3 − 3x4 = 9
c.
x1 + 2x2 − 3x3 = 02x1 + 5x2 + 2x3 = 03x1 − x2 − 4x3 = 0
d.
x1 + 2x2 − x3 = 02x1 + 5x2 + 2x3 = 0x1 + 4x2 + 7x3 = 0x1 + 3x2 + 3x3 = 0
e.
x1 + x2 + x3 + x4 = 0x1 + x2 + x3 − x4 = 4x1 + x2 − x3 + x4 = −4x1 − x2 + x3 + x4 = 2
f.
x1 + 3x2 + 3x3 = 1x1 + 3x2 + 4x3 = 0x1 + 4x2 + 3x3 = 3
g.
x1 − 3x2 + 2x3 = −6−3x1 + 3x2 − x3 = 172x1 − x2 = 3
h.
x1 − 2x2 + 3x3 − 2x4 = 03x1 − 7x2 − 2x3 + 4x4 = 04x1 + 3x2 + 5x3 + 2x4 = 0
i.
2x1 + x2 − 2x3 + 3x4 = 03x1 + 2x2 − x3 + 3x4 = 43x1 + 3x2 + 3x3 − 3x4 = 9
j.
x1 + 2x2 − 3x3 = 02x1 + 5x2 + 2x3 = 03x1 − x2 − 4x3 = 0
k.
x1 + 2x2 − x3 = 02x1 + 5x2 + 2x3 = 0x1 + 4x2 + 7x3 = 0x1 + 3x2 + 3x3 = 0
l.
x1 + x2 + x3 + x4 = 0x1 + x2 + x3 − x4 = 4x1 + x2 − x3 + x4 = −4x1 − x2 + x3 + x4 = 2
m.
x1 + 3x2 + 3x3 = 1x1 + 3x2 + 4x3 = 0x1 + 4x2 + 3x3 = 3
n.
x1 − 3x2 + 2x3 = −6−3x1 + 3x2 − x3 = 172x1 − x2 = 3
Corrigé à la page 160.
Exercice 94.Exercice 7, page 86. Discuter les systèmes suivants
a.
{
mx + y = 1x + my = 1

48 CHAPITRE 4. ALGÈBRE LINÉAIRE, VECTEUR ET MATRICES
b.
λx + y + m = 1x + λy + z = 1x + y + λz = 1
Corrigé à la page 162.
Exercice 95.Pour chacun des systèmes suivants A · X = B,
a. Résoudre le système par échelonnement,
b. Calculer A−1,
c. Vérifier votre réponse en calculant A−1B. Qu’êtes-vous censé obtenir ?
Les énoncés sont
a.
A =
2 1 −23 2 25 4 3
, B =
1014
(4.5)
Corrigé à la page 162.
Exercice 96.Discuter et résoudre le système
1 2 3 42 −1 1 −13 1 r 3
−2 6 4 s
x1
x2
x3
x4
=
y1
y2
y3
y4
. (4.6)
Corrigé à la page 163.
Un problème de Bachet (XVIIème siècle)
Exercice 97.Trois hommes ont chacun certaine somme d’écus. Le premier donne des siens auxdeux autres autant qu’ils en ont chacun ; en après le second en donne aux deuxautres autant qu’ils en ont chacun ; finalement le troisième en donne aux deuxautres autant qu’ils en ont chacun : cela fait, chacun se trouve 8 écus. On demandecombien chacun en avait du commencement.
Extrait des Problèmes plaisants et délectables qui se font par les nombres, publiéen 1612.
Corrigé à la page 165.

4.2. OPÉRATIONS SUR LES MATRICES 49
Un problème stupide (XXième siècle)
Exercice 98.Un père a 25 ans de plus que son fils. Dans 7 ans, il aura 5 fois l’âge de son fils.Que fait le père ?
Corrigé à la page 165.
4.2 Opérations sur les matrices
Exercice 99.On donne les matrices
A =
1 23 45 6
, B =
−3 −21 −54 3
. (4.7)
Déterminer la matrice D telle que A + B − D = 0.Corrigé à la page 166.
Exercice 100.
Si A =
(
1 −12 −1
)
et B =
(
1 14 −1
)
, montrer que (A + B)2 = A2 + B2.
Corrigé à la page 166.
Exercice 101.Montrer que les matrices
A =
0 1 −14 −3 43 −3 4
B =
−1 0 a0 −1 b0 0 1
, (4.8)
avec a, b ∈ R sont involutives, c’est à dire telles que X2 = 1.Corrigé à la page 166.
Exercice 102.Soit
A =
(
2 12 1
)
. (4.9)
Trouver toutes les matrices X telles que AX = A.Corrigé à la page 166.
Exercice 103.Démontrer que si les matrices A et B sont telles que AB = A et BA = B, alorsA2 = A et B2 = B.
Corrigé à la page 167.

50 CHAPITRE 4. ALGÈBRE LINÉAIRE, VECTEUR ET MATRICES
Exercice 104.Montrer que
(
λ λ0 λ
)n
=
(
λn nλn
0 λn
)
(4.10)
pour tout λ ∈ R et tout n ∈ N0.Corrigé à la page 167.
Exercice 105.À quelles conditions sur les matrices A et B peut-on écrire
a. (A − B)2 = A2 + B2
b. (A + B)(A − B) = A2 − B2.
Corrigé à la page 167.
Exercice 106.Trouve toutes les matrices B qui commutent avec la matrice
A =
0 1 0 00 0 1 00 0 0 10 0 0 0
(4.11)
Corrigé à la page 167.
Exercice 107.
Soit A =
(
1 10 1
)
. Montrer par récurrence que An =
(
1 n0 1
)
.
Corrigé à la page 168.
4.3 Espaces vectoriels
Exercice 108.Exercice 1, page 79. Quels sont parmi les ensembles suivants qui ont une structured’espace vectoriel réel ?
a. L’ensemble des polynômes à coefficients réels en une indéterminée, de degré≤ 3,
b. L’ensemble des polynômes à coefficients réels en une indéterminée, de degré3.
c. L’ensemble des triplets (a, b, c) de nombres réels tels que a + 2b − c = 0.
d. L’ensemble des triplets (a, b, c) de nombres réels tels que a2 + b2 + c2 = 1.
e. L’ensemble des triplets (a, b, c) de nombres réels tels que a − b = 1.

4.3. ESPACES VECTORIELS 51
f. L’ensemble des triplets (a, b, c) de nombres réels tels que a+b = 0 et a+c = 0.
g. L’ensemble des couples de nombres entiers.
h. L’ensemble des couples (a, b) de réels tels que a2 + b2 6= 0.
Corrigé à la page 168.
Exercice 109.Exercice 2, page 19. Dans R3, calculer la somme vectorielle 5(−3
√2, 1
10, 2) −
(2, −1, 35) + 7(
√2, 0, 2).
Corrigé à la page 169.
Exercice 110.Exercice 3, page 79. Le vecteur (1, 2, 3) de R3 est-il combinaison linéaire desvecteurs (1, 1, 1), (3, 5, 2) et (1, 3, 0) ? Même question pour le vecteur (0, −2, 1).
Corrigé à la page 169.
Exercice 111.Exercice 5, page 80. Trouver une condition nécessaire et suffisante sur les nombresréels a, b, et c pour que les vecteurs (0, 1, −1), (5, −2, 1) et (a, b, c) forment unepartie liée de R3.
Corrigé à la page 170.
Exercice 112.Exercice 6, page 80. Les parties suivantes de R3 sont-elles libres ?
a. {(1, 2, 1), (1, 1, 1)},
b. {(1, 0, 0), (0, 1, 0), (0, 0, 1)},
c. {(0, 0, 0), (3, 2, 1)},
d. {(2, 1, −3), (1, 4, 0), (4, 9, −3)},
e. {(1, 0, 0), (0, 1, 0), (0, 0, 1), (0, 1, 1), (1, 0, 1), (1, 1, 0)},
f. {(1, 0, 1), (0, −8, 0), (1, 7, −2)},
g. {(−1, 0, 1)}Corrigé à la page 171.
Exercice 113.Exercice 7, page 80. Dans l’espace vectoriel E0, déterminer l’ensemble des pointsqui sont combinaisons linéaire des points des parties suivantes de E0 :
a. Une sphère de centre 0.
b. Une droite ne passant pas par o.
c. Un point distinct de o.
d. Un plan passant par o.

52 CHAPITRE 4. ALGÈBRE LINÉAIRE, VECTEUR ET MATRICES
e. Un plan ne passant pas par o.
f. La réunion de deux droites, à discuter suivant les positions relatives de cesdeux droites.
Corrigé à la page 171.
Exercice 114.Exercice 8, page 80. Parmi les sous-ensembles suivants, lesquels sont des partiesgénératrices de R3 ? Lesquels sont des bases de R3 ?
a. {(1, 2, 1), (1, 1, 1)},
b. {(1, 0, 0), (0, 1, 0), (0, 0, 1)},
c. {(0, 0, 0), (3, 2, 1)},
d. {(2, 1, −3), (1, 4, 0), (4, 9, −3)},
e. {(1, 0, 0), (0, 1, 0), (0, 0, 1), (0, 1, 1), (1, 0, 1), (0, 0, 1)},
f. {(1, 0, 1), (0, −5, 0), (1, 7, −2)},
g. {(−1, 0, 1)}.
Corrigé à la page 172.
Exercice 115.Exercice 9, page 81. Quelles sont les composantes du vecteur (1, 2) ∈ R2 dans lesbases suivantes ?
a. {(1, 0), (0, 1)},
b. {(0, 1), (1, 0)},
c. {(1, 2), (1, 1)},
d. {(1, 1), (2, 1)},
e. {(−1, 3), (4, 0)}Corrigé à la page 172.
Exercice 116.Exercice 10, page 81. Quel est le vecteur de R3 qui a pour composante (1, 2, −1)dans la base e1 = (1, 1, 1), e2 = (0, 1, 2), e3 = (0, −1, 0) de R3 ?
Corrigé à la page 172.
Exercice 117.Exercice 11, page 81. Donner une base de R2 dans laquelle les composantes duvecteur (1, 2) sont (0, 1).
Corrigé à la page 172.

4.3. ESPACES VECTORIELS 53
Exercice 118.Décrire une base de R3 dans laquelle les composantes des vecteurs (7, −5, 2) et(√
3, 29, −8) sont aussi simples que possible.Corrigé à la page 173.
Exercice 119.Exercice 13, page 81. Dans R2, on donne les bases
E =
{
e1 = (1, 0)e2 = (0, 1)
F =
{
f1 = (1, 1)f2 = (1, 2)
G =
{
g1 = (1, 2)g2 = (2, 1).
(4.12)
a. Quelles sont les composantes du vecteur (a, b) dans les bases E, F et G ?
b. Quelles sont les composantes du vecteur 7e1 − 2e2 dans les bases F et G ?
c. Quelles sont les composantes du vecteur f1 + 3f2 dans les bases E et F ?
d. Quelles sont les composantes du vecteur g1 dans les bases E et F ?
Corrigé à la page 173.
Exercice 120.Dans l’espace vectoriel des polynômes à coefficients réels de degré ≤ 2, trouverune base du sous espace engendré par les polynômes 5x2 + 3x + 2, −5x2 + 9x + 8,−10x2 + 18x + 12 et x2 + 9x + 6.
Corrigé à la page 173.
Exercice 121.Exercice 15, page 82. Les fonctions ex, sin(x) et cos(x) sont-elles une partie librede l’espace vectoriel des fonctions continues de R vers R ? Même question pour lesfonctions sin2(x), cos2(x), sin(2x) et cos(2x).
Corrigé à la page 174.
Exercice 122.Dans l’espace vectoriel F des fonction de R dans R, on considère le sous-ensembleL des fonctions f de la forme
f(x) = A(x) cos(x) + B(x) sin(x) (4.13)
où A(x) et B(x) sont deux polynômes en x de degré ≤ 1.
a. Montrer que L est un sous-espace de F ,
b. Montrer que les fonctions f1(x) = cos(x), f2(x) = sin(x), f3(x) = x cos(x),f4(x) = x sin(x) est une base de L.
Corrigé à la page 174.

54 CHAPITRE 4. ALGÈBRE LINÉAIRE, VECTEUR ET MATRICES
4.3.1 Orthogonalité
Exercice 123.Exercice 17, page 82. On donne les vecteurs x = (1
3, 2
3, −2
3) et y = (2
3, 1
3, 2
3) de R3.
a. Montrer qu’ils sont orthogonaux,
b. Construire un vecteur z perpendiculaire à x et y.
c. Donner une base orthonormée de R3 qui contient le vecteur v = 1√6(1, 2, 1).
Corrigé à la page 174.
Exercice 124.Calculer une base orthonormée du sous-espace de R4 défini par
V = {(α, α + β, 2α + β − 2γ, β + 2γ) | α, β, γ ∈ R}. (4.14)
Corrigé à la page 174.
Exercice 125.Calculer une base orthonormée du sous-espace de R4 défini par les équations
x1 + x2 + x3 − x4 = 0
x1 − 2x2 + 2x3 = 0.(4.15)
Corrigé à la page 175.
Exercice 126.Soit E le sous-espace de R3 engendré par
{(1, 1, 0), (1, 2, −2), (−2, −3, 2), (−3, −4, 2)}. (4.16)
Donner une base orthonormée de E. Compléter le cas échéant cette base en unebase orthonormée de R3.
Corrigé à la page 176.
Exercice 127.En utilisant les propriétés de l’inverse et de la transposée d’un produit, démonterque
a. si A et B sont orthogonales, alors AB est orthogonale,
b. si A est orthogonale et si B = AT avec T inversible, alors TB−1 est orthog-onale.
Corrigé à la page 176.
Exercice 128.Soit W = {(x1, x2, x3, x4) | x1 + 2x2 + x3 + 3x4 = 0}.

4.4. VALEURS PROPRES ET VECTEURS PROPRES 55
a. Montrer que W est un sous espace de R4. Déterminer sa dimension et unebase.
b. Construire le sous espace vectoriel W ⊥ orthogonal à W . Déterminer sa di-mension et une base.
Corrigé à la page 176.
4.4 Valeurs propres et vecteurs propres
Exercice 129.Exercice 1, page 88. Déterminer les valeurs propres et vecteurs propres des matricessuivantes.
a. A =
(
1 20 3
)
b. B =
0 1 01 0 00 0 1
c. E =
1 3 50 1 02 0 10
.
Sont-elles diagonalisables ?Corrigé à la page 178.
Exercice 130.Exercice 5, page 89. Si λ1, λ2,. . . , λn sont les valeurs propres et v1, v2,. . . , vn sontdes vecteurs propres correspondants d’une matrice n×n A , quelles sont les valeurspropres et vecteurs propres des matrices
a. αA pour α ∈ R,
b. Ak pour k ∈ N0,
c. A−1 si elle existe.
Corrigé à la page 180.
Exercice 131.Exercice 6, page 89. Si y est un vecteur propre de B = R−1AR correspondant à lavaleur propre λ, démontrer que x = Ry est un vecteur propre de A.
Corrigé à la page 181.

56 CHAPITRE 4. ALGÈBRE LINÉAIRE, VECTEUR ET MATRICES
Exercice 132.Exercice 9, page 90. On donne 1 la matrice
M =
a 0 c2 a 3(b − 1)
−3b c a
. (4.17)
a. Déterminer les valeurs c pour que det M = 0 quand a = 1.
b. Pour ces valeurs de c, déterminer les valeurs propres et les vecteurs propresde M . Dans quel(s) cas existe-t-il une base formée de vecteurs propres ?
Corrigé à la page 181.
Exercice 133.Exercice 12, page 91. Les matrices complexes
A =
(
1 00 i
)
et B =
(
1 10 i
)
(4.18)
sont-elles diagonalisables ? Si oui, donner pour chacune d’entre elles une base (duvectoriel complexe C2) dans laquelle elle est diagonale.
Corrigé à la page 182.
Exercice 134.Exercice 14, page 91. Soit
A1 =
3 −1 1−1 5 −11 −1 3
A2 =
2 0 10 3 01 0 2
.
(4.19)
Trouver une matrice orthogonale P qui transforme A en une matrice diagonale.Corrigé à la page 183.
Exercice 135.Exercice 15, page 92. Quelque questions d’interprétation géométrique des matrices.
a. Écrire la matrice A de la symétrie par rapport au plan x = −z de R3.
b. Écrire la matrice B de la symétrie par rapport au plan x = −y de R3.
c. Faire le calcul de C = BA et décrire géométriquement la transformationreprésentée par la matrice C.
1. si si, on vous la donne, vous pouvez la garder.

4.4. VALEURS PROPRES ET VECTEURS PROPRES 57
d. Donner les valeurs propres réelles et les vecteurs propres correspondants deC.
Corrigé à la page 184.
Exercice 136.Exercice 16, page 92. On considère la matrice
M =
(
a 1 − b1 − a b
)
(4.20)
avec a, b ∈ R.
a. Calculer les valeurs propres et les vecteurs propres de M
b. Pour quelle(s) valeur(s) de a et de b la matrice M possède-t-elle deux direc-tions propres orthogonales ?
Corrigé à la page 186.
Exercice 137.Exercice 17, page 93. Dans R2, on considère les transformations suivantes :
a. La symétrie par rapport à la droite y = 2x,
b. la rotation d’angle α 6= 0 autour de l’origine,
c. la symétrie par rapport à l’origine.
Calculer les valeurs et les vecteurs propres de ces transformations et, si possible,donner pour chacune d’elles une base de R2 dans laquelle sa matrice est diagonale.
Corrigé à la page 186.
Exercice 138.Exercice 18, page 93. Sans calculer, déterminer les valeurs et vecteurs propres destransformations suivantes de R3.
a. La symétrie orthogonale par rapport au plan passant par les points (0, 0, 0),(0, 1, 1) et (1, 0, 1).
b. Le symétrie orthogonale par rapport à la droite d’équation x = −y3
= −z2.
Corrigé à la page 186.
Exercice 139.Exercice 19, page 93. On considère la transformation linéaire A de R3 dont lamatrice dans la base canonique est
1 1 −22 1 −23 1 −4
. (4.21)

58 CHAPITRE 4. ALGÈBRE LINÉAIRE, VECTEUR ET MATRICES
a. Chercher les valeurs propres et les vecteurs propres de A.
b. Cette matrice est-elle diagonalisable ? Si oui, donner la matrice d’un change-ment de base qui permet de la diagonaliser.
c. On donne le vecteur v1 = (1, 1, 2). Calculer v2 = Av1 et v3 = A2v1.
d. Montrer que les vecteurs v1, v2 et v3 forment une base de R3.
e. Donner les composantes du vecteur propre de A de norme 2√
6 correspondantà la plus grande valeur propre de A dans la base {v1, v2, v3}.
Corrigé à la page 187.
Exercice 140.Trouver les valeurs propres et les vecteurs propres de la matrice
2 0 α0 −1 00 0 2
(4.22)
où α est un paramètre réel. Discuter selon les valeurs de α.Corrigé à la page 187.
Exercice 141.Si la matrice A est d’ordre 3 et de rang 2, que pouvons nous dire des valeurspropres de A et de leur multiplicité.
Corrigé à la page 188.
4.5 Triangularisation
Exercice 142.Pour chacune des matrices A suivantes, expliquer s’il existe ou non une matriceinversible B telle que la matrice B−1AB soit diagonale.
Si une telle matrice existe, pouvez-vous la choisir orthogonale ?
a. A =
(
3 11 5
)
,
b. B =
(
1 −22 1
)
,
c. C =
(
1 01 1
)
,
d. D =
(
1 21 2
)
.
Corrigé à la page 189.

4.6. FORMES QUADRATIQUES 59
Exercice 143.Déterminer les valeurs propres des matrices suivantes :
a. A =
(
1 10 2
)
,
b. B =
(
1 00 0
)
,
c. R =
(
1 11 1
)
,
d. D =
1 2 11 2 10 1 2
.
Pour chacune des valeurs propres, rechercher l’ensemble des vecteurs proprescorrespondants et donner la dimension de l’espace vectoriel engendré par cesvecteurs propres.
Corrigé à la page 189.
4.6 Formes quadratiques
Exercice 144.(INGE1121, 6.1) Réduire les formes quadratiques suivantes en somme pondérée decarrés par la méthode des valeurs propres et des vecteurs propres. Donner le genredes formes quadratiques.
a. p(X) = 2x1x3 + 2x3x4.
b. p(X) = 2x21 − x2
2 + 2x23 + 4x1x2 + 8x1x3 + 4x2x3
c. p(X) = x1x2 + x1x3 + x2x3
d. p(X) = 2x21 − 2x1x2 + 2x2
2 + 2x23
e. p(X) = x21 + x1x2 + 2x2
2
Corrigé à la page 189.
Exercice 145.(INGE1121, 6.2)Donner le genre de la forme quadratique associée à la matrice
A =
3 −1 −1−1 3 1−1 1 3
. (4.23)
Corrigé à la page 193.

60 CHAPITRE 4. ALGÈBRE LINÉAIRE, VECTEUR ET MATRICES
Exercice 146.(INGE 1121, 6.3) Soit p la forme quadratique associée à la matrice
A =
2 0 −2 00 5 0 −1
−2 0 2 00 −1 0 5
. (4.24)
a. Calculer le range de A.
b. Sachant que (1, 1, −1, 1) est vecteur propre de A, diagonaliser A au moyend’une matrice orthogonale.
c. Écrire la forme quadratique X tAX comme somme pondérée de carrés enfonction des xi.
d. Déterminer le genre de la forme quadratique X 7→ X tAX.
e. Écrire p comme somme pondérée de carrés en fonction de x1, x2, x3 et x4.
Corrigé à la page 194.
Exercice 147.(INGE1121, 6.4) Soit la forme quadratique
p(X) = 2x1x2 − x1x3 + x1x4 − x2x3 + x2x4 − ”x3x4. (4.25)
a. Calculer le rang et le déterminant de la matrice symétrique associée A :
b. Qu’en déduire concernant les valeurs propres de A ?
c. −1 est une valeur propre de A. Calculer sa multiplicité dans le polynômecaractéristique de A.
d. Construire une matrice orthogonale B telle que BtAB soit diagonale.
Corrigé à la page 196.
Exercice 148.(INGE1121, 6.5) Sachant que (−1, 0, 1, 0) est un vecteur propre de la matrice
A =
2 1 −1 11 0 1 1
−1 1 2 11 1 1 0
(4.26)
a. Diagonaliser A au moyen d’une matrice orthogonale
b. Écrire la forme quadratique X tAX sous forme d’une somme pondérée decarrés.

4.6. FORMES QUADRATIQUES 61
Corrigé à la page 198.
Exercice 149.(INGE1121, 6.6)Donner le genre de la forme quadratique
p(X) = 9x21 + 17x2
2 + 10x23 − 6x1x2 + 12
√2x1x3 + 4
√2x2x3. (4.27)
Corrigé à la page 199.
Exercice 150.(INGE1121, 6.7) Déterminer le genre des formes quadratiques associées aux ma-trices suivantes en utilisant au maximum les propositions relatives aux mineurs,mineurs principaux primaires, . . .
a.
A =
−6 1 −21 −3 1
−2 1 −1
(4.28)
b.
A =
5 2 102 −7 310 3 0
. (4.29)
Corrigé à la page 199.
4.6.1 Réserve
Exercice 151.<+ExoexoMatrices-0002+>
Corrigé à la page 200.
Exercice 152.<+ExoexoMatrices-0003+>
Corrigé à la page 200.
Exercice 153.<+ExoexoMatrices-0004+>
Corrigé à la page 200.
Exercice 154.<+ExoexoMatrices-0005+>
Corrigé à la page 200.

62 CHAPITRE 4. ALGÈBRE LINÉAIRE, VECTEUR ET MATRICES

Chapitre 5
Interrogation de janvier 2009(ULB)
Exercice janvier 2009, 1.Esquisser dans le système d’axes le graphe de la fonction indiquée :
a. x2 + 1
b. x3
c. tan(x)
d. log2(x)
e. | ln(x)|f. ln |x|g. sin(x + 1)
h. sin(2πx)
i. e−x.
Corrigé à la page 200.
Exercice janvier 2009, 2.Calculer (1 +
√3i)39 et en donner l’expression la plus simple possible.
Corrigé à la page 200.
Exercice janvier 2009, 3.Soit n ∈ N0 et soient a0, a1,. . . , an ∈ R (an 6= 0). Vérifier que si z ∈ C est solutionde l’équation anxn + an−1x
n−1 + . . . + a1x + a0 = 0, alors z l’est également.Corrigé à la page 200.
Exercice janvier 2009, 4. a. Énoncer un critère de convergence (au choix)pour les séries et en donner le nom.
63

64 CHAPITRE 5. INTERROGATION DE JANVIER 2009 (ULB)
b. La série∑∞
k=21
(ln(k))k converge-t-elle ? Justifier brièvement.Corrigé à la page 201.
Exercice janvier 2009, 5.Montrer par l’absurde que
√2 /∈ Q.
Corrigé à la page 201.
Exercice janvier 2009, 6.Donner l’aire d’un hexagone régulier de côté a.
Corrigé à la page 201.
Exercice janvier 2009, 7.Charles-Édouard souhaite repeindre sa voiture. Pour ce faire, il dispose de potsde peinture verte, jaune, bleue, rouge et noire en suffisance. Il souhaite cependantrepeindre séparément le coffre, le capot, le pare-choc, le toit et chacune des quatreportières. De combien de façons différentes peut-il le faire sachant qu’il souhaitequ’au moins une des portières soit verte et que le pare-choc ne peut pas être bleu ?Justifier brièvement.
Corrigé à la page 202.
Exercice janvier 2009, 8.Soit f la fonction définie par f(x) = 1
2−xpour tout x ∈ R \ {2}. Montrer par
récurrence que
fn(x) =n − (n − 1)x(n + 1) − nx
(5.1)
pour tout n ∈ N0.Rappel : fn(x) = f ◦ . . . ◦ f
︸ ︷︷ ︸
n
(x).
Corrigé à la page 202.
Exercice janvier 2009, 9.Soit f : R → R, une fonction dérivable.
a. Donner la définition de f ′(x).
b. En utilisant la définition de f ′(x), en déduire que si f et g sont deux fonctionsde R dans R dérivables, alors
(fg)′ = f ′g + fg′. (5.2)
Corrigé à la page 202.
Exercice janvier 2009, 10.Énoncer le théorème des accroissements finis, et l’illustrer par un dessin.
Corrigé à la page 203.

65
Exercice janvier 2009, 11.Énoncer la règle de l’Hospital.
Corrigé à la page 203.
Exercice janvier 2009, 12.À une soirée avec n personnes, il y a au moins deux personnes ayant le mêmenombre d’amis présents à la soirée. Vrai ou faux ? Justifier brièvement.
Corrigé à la page 203.
Exercice janvier 2009, 13.Pour quelles valeurs du paramètre a, les courbes d’équations y = e2x+1 et y = 2aex
ont-elles des points d’intersection ? Pour quelle(s) valeur(s) de a n’ont-elles qu’unseul point d’intersection ? Vérifier qu’alors, elles possèdent la même tangente en cepoint.
Corrigé à la page 203.
Exercice janvier 2009, 14.On considère un fil (de fer, par exemple) de longueur 10 cm que l’on coupe enmorceaux. On utilise le premier morceau pour former un carré. Avec le second, onconstruit un cercle. Où faut il couper le fil pour que la somme des aires de cesdeux figures géométriques soit minimales ?
Corrigé à la page 204.

66 CHAPITRE 5. INTERROGATION DE JANVIER 2009 (ULB)

Chapitre 6
Interrogation de mars 2010(UCL)
Exercice mars 2010, 1.Donner un exemple de matrice de rang 2 dont le déterminant est nul.
Corrigé à la page 204.
Exercice mars 2010, 2.Résoudre le système suivant, en discutant selon les valeurs du paramètre k ∈ R.
2x − y + 4z = 1 (6.1a)
2y − 6z = 8 (6.1b)
−4x + 4y + (k − 11)z = 6 (6.1c)
Corrigé à la page 204.
Exercice mars 2010, 3.Soit A une matrice carré d’ordre 5. Montrer que si la somme des éléments dechaque ligne de A est le même réel α, alors α est une valeur propre de A.
Donner le vecteur propre de A associé à la valeur propre α.Corrigé à la page 205.
Exercice mars 2010, 4.Soit E le sous espace de R3 engendré par {(1, 3, 2), (0, 2, −1), (3, 7, 7), (2, 2, 6)}.
a. Donner une base orthonormée de E.
b. Déterminer la dimension de E.
Corrigé à la page 206.
67

68 CHAPITRE 6. INTERROGATION DE MARS 2010 (UCL)

Chapitre 7
Travaux personnels 2009 (ULB)
Lorsque nous demandons d’étudier une fonction, nous demandons les élémentssuivants : domaine de définition, croissance, extréma, points d’inflexion, asymptoteet dessiner le graphe.
7.1 TP-1
7.2 TP-2
7.3 TP-3
Exercice TP3.1.Calculer
a. f ′(2) si f(x) = ln(x2 + 1)
b. g′(e) si g(x) = xx
c. h′(π6) si h(x) = xesin(x)
d. ℓ′(π3) si ℓ(x) = x
5+cos(x).
Corrigé à la page 208.
Exercice TP3.2.Une population de bactéries croît selon la loi p(t) = a2bt. Au temps t = 2, onmesure p(2) = 640, et au temps t = 3, on mesure p(3) = 5120.
a. Calculer a et b.
b. En combien de temps la population est-elle doublée ?
Corrigé à la page 208.
69

70 CHAPITRE 7. TRAVAUX PERSONNELS 2009 (ULB)
Exercice TP3.3.On désire construire une boîte cylindrique, avec couvercle, de volume V donné.Quelles sont les dimensions de la boîte la plus économique (c’est à dire celle dontla surface totale est minimum) ?
Corrigé à la page 209.
Exercice TP3.4.Étudier la fonction définie par f(x) = ln(x2 + 5
9).
Corrigé à la page 209.
Exercice TP3.5.Étudier la fonction f(x) = e−x2
.Corrigé à la page 210.
7.4 TP-4
Exercice TP4.1.On fait tourner autour de l’axe Ox la région du plan comprise entre la courbey = ex
√2x + 1 et les deux axes. Que vaut le volume du solide obtenu ?
Corrigé à la page 210.
Exercice TP4.2.Déterminer la solution de l’équation différentielle
y′ + 2y tan(x) = cos(x) (7.1)
qui s’annule en x = π.Corrigé à la page 211.
Exercice TP4.3.Calculer la longueur d’arc de la courbe d’équations
{
x = et cos(t)y = et sin(t),
(7.2)
0 ≤ t ≤ 4π. Dessiner cet arc de courbe.Corrigé à la page 212.
Exercice TP4.4.Une équipe de biologistes et de géographes part en expédition vers une île lointaine.Leur navire devra parcourir d kilomètres. Parmi les coûts du voyage, il y a ceux ducarburant et ceux du personnel. Le coût par heure en carburant est directementproportionnel au carré de la vitesse, de la forme kv2. Quant au coût pas heure en

7.5. TP-5 71
personnel, il est évidemment indépendant de la vitesse, soit p le cout par heure enpersonnel.
Calculer, en fonction des constantes k et p, la vitesse v en km/h à laquelle ilfaut naviguer pour minimiser le coût total du voyage.
Corrigé à la page 212.
7.4.1 Quelque fautes usuelles
Pour l’exercice TP4.1, les fautes les plus souvent commises sont
a. f ′ = e2x implique f = 12ex. Cela n’est pas vrai. La dérivée de e2x est 2e2x. Le
2 reste dans l’exponentielle.
b. Lorsqu’on intègre par partie, il faut aussi mettre les bornes pour le morceauqui n’est pas dans la nouvelle intégrale :
∫ b
afg′ = [fg]ba −
∫ b
af ′g. (7.3)
Pour l’exercice TP4.2, les fautes les plus souvent commises sont
a. Lorsqu’on a trouvé la solution générale yk(x) qui dépend du paramètre k (ouC), il faut encore trouver la valeur du paramètre k telle que yk(π) = 0.
Pour l’exercice TP4.3, les fautes les plus souvent commises sont
a. Ne pas oublier que e0 = 1.
7.5 TP-5
Exercice TP5.1.Espace vectoriel de polynômes, bases et matrices.
a. Montrer que les vecteurs
B = {1, 1 − x, 1 + x − x2, 1 + x + x2 − x3} (7.4)
forment une base de l’espace vectoriel des polynômes de degré ≤ 3 en x.
b. Calculer les composantes du polynôme 1 + x + x2 + x3 dans la base B.
c. Chercher la matrice de l’application linéaire ϕ définie par
ϕ(
p(x))
= p′(x) (7.5)
pour tout polynôme p(x) dans cette base B.
Corrigé à la page 213.

72 CHAPITRE 7. TRAVAUX PERSONNELS 2009 (ULB)
Exercice TP5.2.Trouver toutes les solutions du système
x + 2y + z − t = 32x − y + t = 25y + 2z − 3t = 4
(7.6)
en utilisant la méthode de Gauss.Corrigé à la page 215.
Exercice TP5.3.Donner toutes les valeurs propres et vecteurs propres des applications linéairesE → E suivantes.
a. Une rotation de 180 degrés autour de{
x = yy = z
(7.7)
b. Une rotation de 90 degrés autour de l’axe Ox.
c. La symétrie par rapport à x + y + z = 0.
d. La symétrie par rapport à l’axe Oz composé avec l’homothétie de rapport 5.
Corrigé à la page 216.
Exercice TP5.4.On donne la matrice
M =
a 0 bb a 0b 0 a
(7.8)
avec a, b ∈ R.
a. La matrice M est-elle inversible ? Discuter suivant les valeurs de a et b sinécessaire.
b. Déterminer les valeurs propres et les vecteurs propres de M .
c. Pour quelles valeurs de a et de b la matrice M est-elle diagonalisable ?
Corrigé à la page 219.

Chapitre 8
Autres exercices
Ce chapitre contient une série d’exercices du type de ce qui est plus ou moinscensé être connu à l’entrée de l’université dans diverses sections scientifiques.
Exercice janvier 2009, 5.Déterminer l’ensemble des x qui satisfont
a. |x| ≤ 2
b.∣∣∣5 − 1
x
∣∣∣ < 1
c. 1|x+2| > 1
|x−1|d.
e. |x2 − 2| ≤ 1
f.
g. |3 − 2x| < 1.
h.
Corrigé à la page 220.
Exercice janvier 2009, 6.Trouver les supremum, infimum, maximum et minimum, si ils existent dans chacundes ensembles suivants.
a. { 1n
| n ∈ N∗}.
b. {0} ∪ { 1n
| n ∈ N∗}.
c.
d.
e. {x | 0 ≤ x ≤√
2, x ∈ R \Q}.
f. { 1n
+ (−1)n | n ∈ N∗}
73

74 CHAPITRE 8. AUTRES EXERCICES
g.
h.
i.
Corrigé à la page 222.
Exercice janvier 2009, 7.Montrer que si a et b sont des nombres réels, alors
sup{a, b} =12
(
a + b + |a − b|)
(8.1a)
inf{a, b} =12
(
a + b − |a − b|)
. (8.1b)
Corrigé à la page 223.
Exercice janvier 2009, 8.Soit A, un ensemble non vide tel que sup A = inf A. Que pouvez-vous dire de A ?
Corrigé à la page 223.
Exercice janvier 2009, 9.Soit A, un ensemble non vide minoré avec inf A > 0. Montrer que
sup{1x
| x ∈ A} =1
inf A. (8.2)
Corrigé à la page 223.
Exercice janvier 2009, 10.Montrer que si A et B sont des ensembles bornés tels que A ⊆ B, alors
inf B ≤ inf A ≤ sup A ≤ sup B. (8.3)
Corrigé à la page 224.
Exercice janvier 2009, 11.Montrer que
1 + 3 + 5 + . . . + (2n − 1) = n2. (8.4)
Corrigé à la page 224.
Exercice janvier 2009, 12.Montrer que
11 · 2
+1
2 · 3+ . . . +
1n(n + 1)
=n
n + 1. (8.5)
Corrigé à la page 224.

75
Exercice janvier 2009, 13.Montrer par récurrence que pour tout n ≥ 1 et pour tout x ≥ 0, on a (1 + x)n ≥1 + nx.
Corrigé à la page 225.
Exercice janvier 2009, 14.Trouver les réels x qui satisfont l’équation
e2x − 2e−2x = 1. (8.6)
Corrigé à la page 225.
Exercice janvier 2009, 15.Résoudre les équations et inéquations suivantes :
a. 2x = 8
b. 2x−1 − 2x−3 = 23−x − 21−x
c. ex + 5e−x = 6
d. 2x > 4x+1
e.(
94
)x − 827
= 0
f. 2 log2(x) + logx(2) = 3
g. log4(1 − x) < 0
h.(
13
)3x<(
13
)2x−9.
Corrigé à la page 226.
Exercice janvier 2009, 16.Résoudre les équations et inéquations suivantes :
a. cos(x) = 1
b. 2 sin x2
= 12
c. cos(π2
− x) =√
32
d. sin(x) = − cos(x)
e. −3 cos2(3x) + 52
cos(3x) − 1 = 0
f. tan(2x) = 3 tan(x)
g. sin(x − π3) > sin(x)
h. sin(2x) = 0
i. cos(40x) = 4
j. sin(x) = cos(x)

76 CHAPITRE 8. AUTRES EXERCICES
k. sin2(x) + cos2(x) = 12
l. | cos(2x)| < 12
m. arcsin(x) = −π4
Corrigé à la page 227.
Exercice janvier 2009, 17.Construire les fonctions inverses des fonctions suivantes sur leur domaine de défi-nition.
a. f(x) = 5√
x + 1
b. g(x) = 3x−1x+4
.
Corrigé à la page 228.
8.1 Limites et continuité
Exercice janvier 2009, 18.Calculer les limites suivantes ou prouver leur non-existence.
a.
limx→∞
sin(x) cos(x)x
(8.7)
b.
limx→∞
x + sin(x)x − sin(x)
(8.8)
c.
limx→∞
sin(x)x2 + 2x + 3
x. (8.9)
Comment résoudre cet exercice avec Sage ? Les lignes de code à rentrer pourrésoudre la première limite sont dans l’ordre
a. var(’x’)
b. f(x)=sin(x)*cos(x)/x
c. limit(f(x),x=oo)
La ligne a déclare que la lettre x désignera une variable. La ligne b définit lafonction f . Notez que la multiplication est notée par la petite étoile *. Pour laligne c, notez que l’infini est écrit par deux petits « o ».
La fonction f(x) = x2 + 2x + 3 s’encode avec f(x)=x**2+2*x+3. Le symbolepour faire l’exposant est la double étoile **.
Corrigé à la page 229.

8.1. LIMITES ET CONTINUITÉ 77
Exercice janvier 2009, 19.Une fonction périodique admet-elle une limite lorsque x tend vers l’infini ?
Corrigé à la page 230.
Exercice janvier 2009, 20.Calculer les limites suivantes en utilisant les règles de calcul.
a. limx→±∞√
x2 + 1 −√
x2 − 1
b. limx→0
√x+4−2
x.
Corrigé à la page 230.
Exercice janvier 2009, 21.Calculer les limites suivantes en utilisant les règles de calcul.
a. limx→0 x sin( 1x).
b. limx→∞(
xx+1
)x+2.
c. limx→0sin(αx)sin(βx)
.Pour effectuer cet exercice avec Sage, il faut taper les lignes suivantes :
(a) var(’x,a,b’)
(b) f(x)=sin(a*x)/sin(b*x)
(c) limit(f(x),x=0)
Noter qu’il faut déclarer les variables x, a et b.
d. limx→∞(
1 + ax
)x.
e. limx→±∞√
x2+1−xx−2
Les lignes pour résoudre par Sage sont :
(a) f(x)=(sqrt(x**2+1))/(x-2)
(b) limit(f(x),x=oo)
(c) limit(f(x),x=-oo)
Noter la commande pour la racine carré : sqrt. Étant donné que cette fonc-tion diverge en x = 2, si tu veux la tracer, il faut procéder en deux fois :
(a) plot(f,(-100,1.9))
(b) plot(f,(2.1,100))
La première ligne trace de −100 à 1.9 et la seconde de 2.1 à 100. Cesgraphiques vous permettent déjà de voir les limites. Attention : ils ne sontpas des preuves ! Mais ils sont de sérieux indices qui peuvent vous inspirerdans vos calculs.
f. limx→2
√x+2−2√x+7−3
.

78 CHAPITRE 8. AUTRES EXERCICES
g. limh→0(x+h)3−x2
h.
Corrigé à la page 230.
Exercice janvier 2009, 22.Étudier le domaine de définition et la continuité des fonctions définies ci-dessous.
a. f(x) =
sin(x)x
si x 6= 0
1 si x = 0.
b. f(x) =
x sin( 1x) si x 6= 0
0 si x = 0.
c. f(x) =
√x+1√
xsi x 6= 0
1 si x = 0.
d. f(x) =
x+1x
sin( xx+1
) si x 6= 0 et x 6= −1
0 si x = 0 ou x = −1.
e. f(x) = (1 + |x|)e|x|.
f. f(x) = ln(1 + |x|).Corrigé à la page 232.
8.2 Suites numériques
Exercice janvier 2009, 23.Calculer la limite des suites suivantes.
a. sn = 1n
b. sn = 2n−13n+2
c. sn = (−1)n
n
Corrigé à la page 233.
Exercice janvier 2009, 24.Prouver que la suite sn = 2n+7
3n+2est croissante et bornée, donc qu’elle admet une
limite. Calculer cette limite.Corrigé à la page 234.
Exercice janvier 2009, 25.La suite s = {sn}n∈N\{0} définie par s1 = 1 et sn =
√3sn−1 pour tout n > 1 est
croissante et bornée. Le prouver. Quelle en est la limite ?Corrigé à la page 235.

8.2. SUITES NUMÉRIQUES 79
Exercice janvier 2009, 26.Les suites suivantes sont-elles bornées, croissantes, décroissantes, convergentes ?Dans le cas où elles sont convergentes, calculer leur limite.
a. sn = 2 − n−110
b. sn = (−1)nn
c. sn = (−1)n−1
n+1.
Corrigé à la page 235.
Exercice janvier 2009, 27.Étudier la convergence des suites suivantes en écrivant une expression formellepour le terme général.
a.√
2,√
2√
2,√
2√
2√
2, . . .
b. 0.2, 0.23, 0.233, 0.2333,. . .
Corrigé à la page 236.

80 CHAPITRE 8. AUTRES EXERCICES

Chapitre 9
Des corrections pour lespharmaciens (ULB)
page 33, 2e quadri, séance 3
ex 23 D’après la page 16bis, une fonction sinusoïdale est une fonction de laforme f(x) = a sin(ωx + ϕ). Pour avoir f(0) = 0, on peut par exemple choisirϕ = 0. Par ailleurs, le maximum de la fonction sinus est 1, donc la maximum def(x) est a ; choisissons donc a = 2. Reste à déterminer ω pour qu’un maximum soitatteint en x = 1. Or on sait qu’un maximum de la fonction sinus est atteint en π
2
par exemple ; choisissons donc ω = π2, de sorte que si x = 1, on obtient 2 sin(π
2) = 2
qui est bien le maximum de f .La fonction choisie est donc f définie par f(x) = 2 sin(π
2x).
ex 25 Notons f la fonction définie par
f(x) =x2 + px + q2
x
et calculons
f ′(x) =x2 − q2
x2
de sorte que f ′(x) = 0 si et seulement si x = ±q (avec q 6= 0, pour que la dérivéeait un sens). On remarque également, par le signe de la dérivée, que l’extrémumobtenu en −|q| est un maximum, l’autre étant un minimum.
Dès lors nous aurons deux cas possibles : si on impose f(−q) = 0 et f(q) = 4,on obtient q = 1 et p = 2, et si on impose f(−q) = 4 et f(q) = 0, on obtientq = −1 et p = 2.
Dans les deux cas, les extrémas sont (−1, 0) (maximum) et (1, 4) (minimum).
81

82 CHAPITRE 9. DES CORRECTIONS POUR LES PHARMACIENS (ULB)
ex 29 Si le carton fait a de largeur et b de hauteur, alors la surface imprimable–tenant compte des marges– est (a − 3)(b − 2) et est fixée à 54. On veut doncminimiser la surface de carton, donnée par ab, sachant que a = 3 + 54
b−2.
Définissons f(b) = 3b + 54bb−2
, et trouvons-en le minimum. Sa dérivée est
f ′(b) = 3 +54(b − 2) − 54b
(b − 2)2=
3(b − 2)2 − 108(b − 2)2
et s’annule pour b = −4 (à rejeter, n’a pas de sens pour une longueur) ou b = 8.D’après le signe de la dérivée, b = 8 fournit bien un minimum.
En conclusion, b = 8 et a = 12.
ex 30 Soient a et b ces nombres. On sait a, b ≥ 0 et a+b = 12, donc b = 12−a.
a. On veut minimiser a2 + b2 = a2 + (12 − a)2 = f(a). La dérivée f ′(a) =2a − 2(12 − a) s’annule pour a = 6. La solution est donc a = b = 6.
b. On veut maximiser ab2 (ou ba2, mais il suffit d’échanger les nombres pourretomber sur le premier cas). On définit f(a) = a(12 − a)2, et la dérivée
f ′(a) = (12 − a)2 − 2a(12 − a)
s’annule lorsque a = 12 (mais alors b = 0, à rejeter, ceci n’est pas un maxi-mum) ou lorsque a = 4 ; les solutions sont donc (4, 8) et le symétrique (8, 4).
c. On veut maximiser ba3 (même remarque que ci-dessus), donc on définitf(a) = (12 − a)a3 dont la dérivée est
f ′(a) = −a3 + 3(12 − a)a2
et s’annule pour a = 0 (pas un maximum) ou 9 = a ; donc les solutions sont(9, 3) et (3, 9).
ex 32 On cherche (x, y) tel que y2 = 4ax et minimisant la distance
d = ‖(x, y) − (2a, a)‖ =√
(x − 2a)2 + (y − a)2 =
√(
y24a
− 2a)
2 + (y − a)2
Remarquons que minimiser d revient à minimiser d2, donc posons
fa(y) =(
y24a
− 2a)
2 + (y − a)2
et calculons la dérivée
f ′a(y) = 2
(y24a
− 2a)
y
a+ 2(y − a) =
y34a2
− 2a
qui s’annule lorsque y = 2a. Donc la solution est (x, y) = (a, 2a)

83
ex 33 Soit x la distance “sur le rivage” par rapport au premier bâteau oùsera débarqué le passager (x est entre 0 et 5). Alors il s’agit de minimiser
d(x) =√
9 + x2 +√
(5 − x)2 + 81
donc on calcule la dérivée
d′(x) =x√
9 + x2− 5 − x√
(5 − x)2 + 81=
x√
(5 − x)2 + 81 + (x − 5)√
9 + x2√
9 + x2√
(5 − x)2 + 81
qui s’annule lorsque 3|x| = |x − 5| càd lorsque 3x = 5 − x (car x ∈ [0, 5]), doncx = 5
4.
Le trajet minimal du bâteau est donc d(54) = 13.
Une autre de manière de voir le problème est de considérer le principe deréflexion : le trajet minimal est alors donné par
√52 + 122 = 13.

84 CHAPITRE 9. DES CORRECTIONS POUR LES PHARMACIENS (ULB)

Chapitre 10
Corrections
Correction de l’exercice 1
a. Le numérateur et le dénominateur s’annulent en x = 2, donc nous pouvonscertainement simplifier la fraction par (x − 2). En effet, une simple factori-sation du second degré nous montre que x2 + x − 6 = (x − 2)(x + 3), tandisque le dénominateur est un produit remarquable : x2 − 4 = (x + 2)(x − 2).Il reste donc
limx→2
(x − 2)(x + 3)(x − 2)(x + 2)
= limx→2
x + 3x + 2
=54
. (10.1)
b. En utilisant la règle de l’Hospital, nous trouvons
limx→ π
4
1 − tan(x)cos(2x)
= limx→ π
4
−1/ cos2(x)−2 sin(2x)
limx→ π
4
12 sin(2x) cos2(x)
= 1. (10.2)
c.
d.
e. Lorsqu’on voit la fonction x/√
1 + x2, il y a moyen de facilement deviner lasolution. En effet, lorsque x est très grand, le 1 à côté du x2 ne vaut pasgrand chose, et on peut remplacer 1 + x2 par x2. Le dénominateur devientdonc
√x2 = |x|, et la limite est ±1.
Affin de calculer plus précisément, utilisons la règle de l’Hospital :
l = limx→±∞
x√1 + x2
= limx→±∞
1x 1√
1+x2
= limx→±∞
√1 + x2
x. (10.3)
À ce moment, nous avons l’impression de tourner en rond : nous sommestombés exactement sur l’inverse de la fonction de départ. En réalité, ce que
85

86 CHAPITRE 10. CORRECTIONS
nous avons prouvé, c’est que l = 1/l, ce qui n’est possible qu’avec l = 1 oul = −1.Il faut encore déterminer si la limite est 1 ou −1 (en l’infini et en moinsl’infini). Rien qu’en regardant la fonction, nous voyons qu’elle est positivepour les x > 0, donc sa limite doit être +1 en +∞. De la même manière, lafonction est négative pour x < 0, donc sa limite en −∞ doit être −∞.
f. Pour rappel : (ax)′ = ax ln(x). En sachant cela, la règle de l’Hospital montreque
limx→0
ax − bx
sin(x)= lim
x→0
ax ln(a) − bx ln(b)cos(x)
= ln(a) − ln(b). (10.4)
g.h.i.j.k. Règle de l’Hospital immédiate :
limx→0
1 − cos(x)sin(x)
= limx→0
sin(x)cos(x)
= 0. (10.5)
l.m.n. On a un produit de type 0 × ∞. Affin d’utiliser la règle de l’Hospital, nous
la écrivons xm ln(x) = ln(x)/(x−m), et nous trouvons
limx→0
ln(x)x−m
= limx→0
1/x
−mx−m−1= lim
x→0
1−mx−m
= 0. (10.6)
o.p.q.r.s.
Correction de l’exercice 2En règle générale, pour calculer des limites de fonctions qui se présentent sous
la forme f(x)g(x), il faut faire la manipulation suivante :
f(x)g(x) = eln
(
f(x)g(x)
)
= eg(x) ln
(
f(x)
)
. (10.7)
À partir de là, nous devons calculer la limite de g(x) ln(
f(x))
, et puis prendrel’exponentielle en justifiant par le faire que l’exponentielle est une applicationcontinue (et donc commute avec la limite).

87
a.
b.
c.
d.
e. En vertu de la manipulation (10.7), nous devons calculer
limx→0
sin(x) ln(x) = limx→0
ln(x)1/ sin(x)
= limx→0
1/x
− cos(x)/ sin(x)2= − lim
x→0
1x
sin(x)2
cos(x).
(10.8)Nous éliminons un des sinus et le 1
xen utilisant la limite limx→0
sin(x)x
= 1.La limite (10.8) vaut en définitive zéro, de telle sorte que
limx→>0
xsin(x) = e0 = 1. (10.9)
f.
g.
h.
i.
j. Nous avons
limx→∞
(2x
+ 1)x
= limx→∞
exp(
x ln(2x
+ 1))
. (10.10)
La limite à calculer est donc la suivante qui se traite par l’Hospital :
limx→∞
x ln(2
x+ 1
)
= limx→∞
(−2/x2)/(
2x
+ 1)
−1/x2= 2. (10.11)
La limite recherchée est donc e2.
k. Après avoir fait le coup de l’exponentielle, nous devons calculer la limite
limx→1
(x−1) ln(
ln(x))
= limx→1
= limx→
ln(
ln(x))
1x−1
= − limx→
(x − 1)2
x ln(x)= lim
x→1
2(x − 1)1/x
= 0.
(10.12)La réponse attendue est donc e0 = 1.
l.
m.
n.
o.

88 CHAPITRE 10. CORRECTIONS
Correction de l’exercice 3La stratégie est toujours de dériver la fonction, et puis de chercher les zéros de
la dérivée.
a. y(x) = 2 sin(x) + cos(2x). Nous avons, en utilisant une petite formule detrigonométrie
y′(x) = 2 cos(x) − 2 sin(2x) = 2 cos(x) − 2 sin(x) cos(x) (10.13)
Cette dérivée s’annule si cos(x) = 0, ou bien si sin(x) = 12. Les valeurs, entre
π et 2π, qui le font sontπ
2,3π
2,π
6,2π
3. (10.14)
Les extrema globaux sont x = 3π/2 et x = π/6 où la fonction vaut respec-tivement −3 et 3/2.
b. y(x) = x2 + 250x
, la dérivée est
y′(x) = 2x − 250x
. (10.15)
Pour résoudre y′ = 0, nous commençons par multiplier l’équation par x2
pour trouver 2x3 − 250 = 0, dont la seule solution réelle est x = 5.
c. y(x) = ex/x, la dérivée est
y′(x) =(x − 1)ex
x2, (10.16)
qui s’annule pour x = 1. Rappelez vous que ex ne s’annule jamais.
Correction de l’exercice 4Exercice de dérivation de fonctions composées, en n’oubliant pas de se simplifier
la vie avec la formule ln(a2) = 2 ln(a). La réponse est
y′(x) =8 ln(4x2)
x. (10.17)
Cette fonction peut également être dérivée par Sage avec les commandes suiv-antes :
a. var(’x’)
b. f(x)=2*log( (2*x)**2 )**2
c. f.diff(x)

89
Sage donne la réponse sous forme d’une fonction de x.
Correction de l’exercice 5Affin de dériver xx, il faut écrire
xx = eln(xx) = ex ln(x), (10.18)
dont la dérivée vaut (
ln(x) + 1)
ex ln(x). (10.19)
Cela s’annule lorsque ln(x) = −1, c’est à dire en x = 1/e.
Correction de l’exercice 6La droite D passe par (3, 5), par (0, b) et par (a, 0). Étant donné que deux
point fixent la droite, la connaissance de b fixe a. Nous commençons par chercherla surface du triangle qui passe par (0, b) et par (3, 5).
La droite est
y =5 − b
3x + b, (10.20)
et elle coupe l’axe Ox en x = − 3b5−b
. Le triangle a donc une base de longueur−3b/(5 − b) et de hauteur b, donc la surface est
S(b) =−3b2
5 − b, (10.21)
qu’on va essayer de maximiser. La dérivée est
S ′(b) =3b2 − 30b
b2 − 10b + 25, (10.22)
et s’annule pour b = 10.
Correction de l’exercice 7La situation est représentée sur la figure 10.1.Cet exercice peut être résolu de façon simple en remarquant que le canot doit
aller de A vers I puis de I vers B. Ce trajet est le même que celui qui consiste àaller de A vers I puis de I vers B′, si B′ est le symétrique de B par rapport à lacôte. Ce qu’il faut faire est donc simplement fixer x pour que le trajet AIB′ soitune droite.
La réponse est x = 1.Sans cette astuce, la distance à parcourir, en fonction de x s’exprime avec
Pythagore :d(x) =
√x2 + 9 +
√
(4 − x)2 + 81, (10.23)

90 CHAPITRE 10. CORRECTIONS
dont la dérivée estd′(x) =
x√x2 + 9
− 4 − x√
(4 − x)2 + 81. (10.24)
Après mise au même dénominateur, nous voyons que cela s’annule en x = 1, commeprécédemment déduit.
3 km
9 kmb
A
bB
b B′
b
x
Figure 10.1 – Petit dessin pour l’exercice 7.
Correction de l’exercice 8Il y a deux types d’intégrales remarquables. Le premier est
∫ f ′
f= ln(f) (10.25)
pour toute fonction f .Le second est
∫
ff ′ =f 2
2(10.26)
pour toute fonction f . Cette formule se prouve simplement faisant le changementde variable u = f , donc du = f ′dx. Avec ce changement de variable, nous trouvons∫
ff ′dx =∫
udu = u2
2.

91
Affin de se ramener à une de ces deux, il faut soit faire un changement devariable, soit essayer de voir si une partie de la fonction à intégrer ne ressemblepas à une autre partie.
1. Utiliser la formule∫
xn = xn+1
n+1, et trouver
∫
(x +√
x)dx =x2
2+
23
x3/2. (10.27)
2.
3.
4. Faire le changement de variable u = 3x − 7, du = 2dx, ce qui amène∫
dx
3x − 7=
13
∫du
u=
ln(u)3
=13
ln(3x − 7). (10.28)
5. Après avoir effectué le changement de variable u = 2x, il nous reste à faire
I =∫
tan(2x) =12
∫ sin(u)cos(u)
du. (10.29)
La subtilité est de voir que le numérateur sin(u) est la dérivée (au signeprès) du dénominateur cos(u), donc nous sommes dans le cas de l’intégraleremarquable f ′/f avec f(x) = cos(x) :
I = −12
ln(
cos(u))
= −12
ln(
cos(2x))
. (10.30)
6. Nous savons que(
tan(x))′
= 1/ cos2(x), donc nous posons u = 7x, du =du/7 et nous trouvons
I =∫
dx
cos2(7x)=
17
∫du
cos2(u)=
17
tan(7x). (10.31)
7. Même idée que 5.
8. Ici, la bonne idée est de poser u(x) = − sin(x), de telle manière à avoirdx = −du/ cos(x). L’intégrale devient
∫
e− sin(x) cos(x)dx =∫
eu(−du) = −e− sin(x). (10.32)
9. Nous savons que(
tan(x))′
= sec2(x), donc nous sommes dans le cas remar-quable
∫
ff ′ avec f = tan(x). La réponse est donc
I =tan(x)2
2. (10.33)

92 CHAPITRE 10. CORRECTIONS
10. Le truc à voir, c’est que(√
2x2 + 3)′
= 2x√2x2+3
, donc
I =12
∫ 2x√2x2 + 3
=12
∫ (√2x2 + 3
)′=
√2x2 + 3
2. (10.34)
11. La formule à repérer est(
arctan(x))′
= 1/(1+x2), donc nous sommes encoredans le cas remarquable
∫
ff ′ avec f(x) = arctan(x). La réponse est donctout de suite
I =f(x)2
2=
12
arctan(x)2. (10.35)
12. Lorsque nous avons des combinaisons simples de fonctions trigonométriques,effectuer un changement de variable où u est une des fonctions. Ici, le change-ment u = sin(x) fait l’affaire :
∫ cos(x)1 + sin2(x)
=∫ du
16 + u2=
14
arctan(
u
4
)
=14
arctan
(
sin(x)4
)
. (10.36)
13. Cette intégrale est un cas remarquable∫
(f ′/f) avec f(x) = ln(x).
14. sage: var(’x’)
sage: f(x)=1/sqrt(9-x**2)
sage: f.integrate(x)
x |--> arcsin(1/3*x)
15. sage: f(x)=1/(4-9*x**2)
sage: f.integrate(x)
x |--> -1/12*log(3*x - 2) + 1/12*log(3*x + 2)
16. sage: f(x)=1/sqrt(x**2+9)
sage: f.integrate(x)
x |--> arcsinh(1/3*x)
Noter ici le sinus hyperbolique dû au signe différent par rapport au point 14.
17. Ici, c’est le changement de variable u = ln(x) qui fonctionne parce qu’ilamène gratuitement du = dx/x, c’est à dire le x du dénominateur :
∫dx
x√
1 − ln2(x)=∫
du√1 − u2
= arcsin(u) = arcsin(
ln(x))
. (10.37)
18. sage: f(x)=sin(2*x)/sqrt(1+cos(x)**2)
sage: f.integrate(x)
x |--> -2*sqrt(cos(x)^2 + 1)

93
19. Ici, affin de faire la même chose que dans le numéro 17, on peut être tentéde poser u = e2x parce que c’est ce qui arrive dans la racine. Hélas, çane fonctionne pas (essayez pour voir). Le bon changement est u = ex, etdu = exdx, de telle manière à obtenir
∫exdx√1 − e2x
=∫
du√1 − u2
= arcsin(ex). (10.38)
20. sage: f(x)=acos(x)**2/sqrt(1-x**2)
sage: f.integrate(x)
x |--> -1/3*arccos(x)^3
21. Affin de se simplifier la vie, nous passons en base e en faisant 2f = eln(2f ) =ef ln(2). Pour simplifier la notation, nous posons a = ln(2). Ce que nous devonsintégrer est
I =∫
eax2
xdx. (10.39)
Étant donné que(
eax2)′
= 2aeax2, nous trouvons
I =12a
∫
2axeax2
=12a
eax2
. (10.40)
22. Le dénominateur ressemble à la formule connue de l’intégrale∫ 1√
1−x2 . Hélas,nous avons x4 au lieu de x2. Du coup, nous allons essayer un changement devariable qui fait que u2 = x4, comme ça nous aurons
√1 − u2 au dénomina-
teur, comme dans la formule connue. Le changement est u = x2, du = 2xdx.Il vient :
∫xdx√1 − x4
=12
∫du√
1 − u2, (10.41)
que nous savons faire.
23.
24. Ici, il s’agit de trouver un changement de variable qui amène sur u2 −1, pourcela, nous commençons par récrire le dénominateur de la façon suivante :
a2x2 − b2 = b2(a2
b2x2 − 1), (10.42)
et puis nous faisons le changement de variable u = ax/b, qui donne
I =1b2
∫ (b/a)du
u2 − 1= − 1
ab
12
ln∣∣∣∣
1 + u
1 − u
∣∣∣∣ . (10.43)

94 CHAPITRE 10. CORRECTIONS
25. Ici, il faut voir que 1/ cos2(x) est la dérivée de tan(x), donc le changementde variable u = tan(x) amène l’intégrale
∫du√u − 1
(10.44)
26. Le x au dénominateur et la présence d’un logarithme indiquent le changementde variable u = ln(x), qui amène à
∫ cos(
ln(x))
dx
x=∫
cos(u)du = sin(u) = sin(
ln(x))
. (10.45)
27.
28. En écrivant l’intégrale sous la forme
∫ex/2dx√1 − ex
, (10.46)
le changement de variable u = ex/2 se propose tout seul. Nous avons dx =2e−x/2du et il reste à intégrer
∫ 2du√1 − u2
. (10.47)
29.
30. Encore une fois, la présence d’un x au dénominateur et d’un logarithmesuggère de poser u = ln(x). Il reste
I =∫√
1 + ln(x)
xdx =
∫ √1 + udu, (10.48)
cette dernière intégrale se règle par le changement de variable v = 1 + u, etnous trouvons
I =v3/2
3/2=
23
(1 + u)3/2 =23
(
1 + ln(x))3/2
. (10.49)
31.
32. Chose à remarquer :(
ln(
sin(x)))′
= cotg(x), donc on est dans le cas∫
(f ′f)
avec f = ln(
sin(x))
, et donc
I =f(x)2
2=
12
ln2(
sin(x))
. (10.50)

95
33. Le changement de variable u = 1 − x3 amène
13
∫
u2du =13
u3
3=
19
(1 − x3)3. (10.51)
Correction de l’exercice 9Le secret pour intégrer une fraction avec un second degré au dénominateur est
de faire apparaître une combinaison de la forme (αx2 + A) + B au dénominateur,à la place du binôme donné.
a. Nous cherchons A et B pour que 3x2 − 2x + 4 = (√
3x + A)2 + B. Pour cefaire, nous développons le carré (produit remarquable) et nous égalisons lestermes de degré égaux :
(√
3x + A)2 = 3x2 + 2A√
3x + A2, (10.52)
doit être égalé à 3x2−2x+4. Nous en déduisons que A = −1/√
3 et B = 11/3.L’intégrale à calculer se récrit donc
∫dx
3x2 − 2x + 4=∫
dx(√
3 − 1√3
)2+ 11
3
. (10.53)
Nous posons maintenant u =√
3x − 1/√
3 et nous avons
1√3
∫du
u2 +(√
113
)2 , (10.54)
qui se résous par la formule usuelle.
b.
c. Cette intégrale se coupe en deux :
I =∫ 3x
1 − 4x2+∫ 1
1 − 4x2. (10.55)
Le deuxième morceau est usuel : il se traite avec le changement de vari-able v = 2x. Pour le premier morceau, on a un x au numérateur, et undénominateur dont la dérivée contient juste un terme en x. Nous posonsdonc u = 1 − 4x2, du = −8xdx. Nous avons alors
I =∫ 3x
(
−du8x
)
u+∫
dv/21 − v2
= −38
ln(u) +14
ln∣∣∣∣
1 + v
1 − v
∣∣∣∣ . (10.56)

96 CHAPITRE 10. CORRECTIONS
d. Encore une fois, nous écrivons le dénominateur sous la forme (αx + A)2 + B.Nous trouvons que
6x2 + x − 1 =(√
6x +1
2√
6
)2 − 2524
. (10.57)
Le changement de variable u =√
6x + 12√
6amène du =
√6dx et
x =u − 1
2√
6√6
(10.58)
donc
I =∫
7u− 7
2√
6√6
1√6du
u2 −(√
2524
)2 (10.59)
Cette intégrale se coupe en deux. Une de la forme∫
u/(u2 − A2), et une dela forme
∫
1/(u2 − A2). Ces deux ont déjà été traitées.
Correction de l’exercice 10
a. Ceci est une intégrale par parie tout ce qu’il y a de plus traditionnel. Nousposons
u = x dv = exdx
du = dx v = ex,(10.60)
nous trouvons alors
I = xex −∫
exdx = (x − 1)ex. (10.61)
b. Étant donné qu’intégrer ln(x) ne nous ragoûte pas trop, mais que le dériverserait du meilleur effet en société, nous essayons par partie avec les choixsuivants :
u = ln(x) dv = x2
du =1x
v =x3
3.
(10.62)
Nous obtenons
I =x3 ln(x)
3−∫
x3
3=
x3 ln(x)3
− x3
9. (10.63)

97
c. Pour celui-ci, il se passe que l’on sait dériver arcsin(x), donc nous allons faire∫
arcsin(x)dx =∫
1 · arcsin(x)dx, et poser
u = arcsin(x) dv = dx
du =1√
1 − x2v = x,
(10.64)
ce qui amène à
I = x arcsin(x) −∫
xdx√1 − x2
= x arcsin(x) −√
1 − x2. (10.65)
d. Celle-ci est un exemple typique de ce qu’il se passe quand on a deux fonctions« cycliques », c’est à dire deux fonctions dont les dérivées bouclent. Posons
u = ex dv = sin(x)dx
du = exdx v = − cos(x),(10.66)
ce qui amène
I = −ex cos(x) =∫
cos(x)ex, (10.67)
dont l’intégrale n’a pas l’air plus sympathique que celle de départ. Si nousrefaisons par partie,
u = ex dv = cos(x)dx
du = exdx v = sin(x),(10.68)
nous tombons sur
I = ex(
sin(x) − cos(x))
−∫
sin(x)ex. (10.69)
L’intégrale qui reste est exactement celle que nous devons calculer. Donc
I = ex(
sin(x) − cos(x))
− I, (10.70)
ou encoreI =
12
ex(
sin(x) − cos(x))
. (10.71)
Correction de l’exercice 11
a. La fonction f est évidement une primitive de f ′, donc
∫ b
af ′(x)dx = f(b) − f(a). (10.72)

98 CHAPITRE 10. CORRECTIONS
b. Par construction, F (t) est une primitive de f ′, donc sa dérivée en t = b vautf ′(b).
c. Cette fois, F est une primitive de f , donc sa dérivée en b vaut f(b).
Correction de l’exercice 12
a. VRAI : sa dérivée est positive. On peut aussi justifier en disant que c’est lasurface sous une courbe toujours positive, donc plus on prend un domainelarge, plus la surface est grande.
b. FAUX
c. FAUX
d. VRAI parce que la fonction est strictement croissante avec limx→∞ f(x) = 0.
e. FAUX : une fonction croissante n’est ni impaire, ni paire
f. FAUX
g. FAUX : fonction croissante
h. FAUX
i. Calculons la dérivée seconde. D’abord, F ′(t) = e−t2, ensuite F ′′(t) = −2te−t2
.La dérivée seconde change effectivement de signe en t = 0, donc il y a unpoint d’inflexion.
Pour classer les nombres dans l’ordre, remarquons que la fonction est une sur-face sous une fonction positive, donc les nombres proposés sont toujours positifs(donc zéro est le plus petit). D’autre part, la fonction est toujours plus petite que1, donc les intégrales sur des domaines de taille 1 sont toujours plus petites que 1.Reste à classer les autres nombres.
Parce que la fonction est paire, la surface entre −3 et −2 est la même qu’entre2 et 3. De plus, la fonction est décroissante lorsqu’on s’éloigne de 0, donc la surfaceproche de zéro est plus grande que les deux autres.
Correction de l’exercice 13Les courbes s’intersectent en x = 0 et x = 4. La surface entre les deux est
S =∫ 4
0y1(x) −
∫ 4
0y2(x) =
∫ 4
0(8x − 2x2) =
[
8x2
2− 2
x3
3
]4
0
= 64 − 1283
=643
.
(10.73)Note : nous avons calculé
∫
(y1 − y2), mais en réalité, c’est un coup de bol. Si lafonction y2 avait été au-dessus de y1, nous aurions dû calculer
∫
(y2 −y1). Heureuse-ment, il y a un truc : il suffit de voir si le résultat final est positif ou négatif. Si nousavions eut un résultat négatif, alors c’est qu’il fallait calculer l’autre possibilité (çane change qu’un signe, donc il ne faut même pas refaire le calcul).

99
Correction de l’exercice 14Les courbes s’intersectent en x = 6 et x = 2. L’intégrale à calculer est
∫ 6
2
12x
− (8 − x) =
[
12 ln(x) +x2
2− 8x
]6
2
= 12 ln(3) − 16. (10.74)
Étant donné que c’est négatif, en fait nous savons qu’il fallait calculer le contraire :la surface est 16 − 12 ln(3).
Correction de l’exercice 15Trouver les intersections entre les deux courbes est aisé : il suffit de résoudre
le petit système{
x2 + y2 = 4 (10.75a)
x2 + y2 = 4x, (10.75b)
dont on déduit immédiatement que 4 = 4x, et donc que x = 1. Ensuite, y = ±√
3.Les deux courbes s’intersectent donc en (1, ±
√3). Nous allons calculer la surface
au-dessus de l’axe, et puis multiplier par deux. Avant que la courbe x2 + y2 = 4xne quitte le cercle, c’est à dire entre 0 et 1, la surface est donné par cette courbe.Après, entre 1 et 2, elle est donné par le cercle lui-même. Un dessin est donné à lafigure 10.2.
Figure 10.2 – L’aire à calculer pour l’exercice 15.
Nous décomposons la surface à calculer en plusieurs intégrales à effectuer :
S1 =∫ 1
0
√4x − x2dx, S2 =
∫ 2
1
√4 − x2dx, (10.76)
et la surface totale à faire vaut
S = 2(S1 + S2). (10.77)

100 CHAPITRE 10. CORRECTIONS
L’intégrale S2 se règle en posant u = x/2, ce qui amène à√
4 − 4u2 = 2√
1 − u2.L’intégrale de cette fonction se calcule en posant u = cos(v), et en utilisant le faitque
√
1 − cos2(v) = sin(v). Ce que nous avons est donc
∫ √1 − u2du =
∫ √
1 − cos2(v)(
− sin(v))
dv = −∫
sin2(v). (10.78)
La dernière intégrale s’effectue en utilisant la formule de trigonométrie 2 sin2 x2
=1 − cos(x).
L’intégrale S1 est plus problématique. Il faut faire apparaître quelque chose dela forme u2 + B. Cherchons donc A et B tels que
4x − x2 = −(x + A)2 + B. (10.79)
La solution est A = −2 et B = 4, de telle façon à ce que la première intégrale soit
S1 =∫ 1
0
√
−(x − 2)2 − 4 =∫ −1
−2
√−u2 + 4 = S2 (10.80)
en posant le changement de variable u = x − 2.Note : en remarquant que la seconde courbe est en réalité aussi un cercle de
même rayon, centré en (0, 2), on peut considérablement simplifier le calcul parceque les surfaces rouges et cyan sont en réalité les mêmes. Cela se voit dans le calcul :au final la difficulté est levée en faisant un changement de variable u = x − 2 (cequi est une translation), et on retombe sur la même intégrale que la simple.
Correction de l’exercice 16La fonction est y =
√xex, qui n’existe pas en dessous de x = 0, qui vaut 0 en
x = 0 et qui est croissante. En utilisant la formule générale du solide de révolution,
V = π∫ 1
0xe2xdx, (10.81)
qui est à intégrer par partie. Nous trouvons
V = π
[
(2x − 1)e2x
4
]1
0
= π
(
e2
4+
14
)
. (10.82)
Correction de l’exercice 17Comme d’habitude, nous écrivons 2−x = e−x ln(2) avant même de commencer à
réfléchir. L’intégrale est assez facile :
V = π∫ ∞
0e−2 ln(2)x =
[
−π
(
e−2 ln(2)x
2 ln(2)
)]∞
0
=π
a. (10.83)

101
Par contre, si nous n’intégrons que de 0 à d, nous trouvons
− π
[
e−2 ln(2)x
2 ln(2)
]d
0
= −πe−2 ln(2)d
a+
π
2 ln(2). (10.84)
Pour que l’un soit la moitié de l’autre, il faut
1 − e−2 ln(2) =12
, (10.85)
c’est à dire d = 12.
Correction de l’exercice 18La parabole « sort » du disque aux points (±
√3, 1). La partie plus petite est
celle qui est au dessus de l’axe Ox. En faisant tourner autour de Ox, nous calculons
V = 2π∫
√3
0
(
(4 − x2) − x2
9
)
=28
√3
5. (10.86)
Pour calculer la rotation dans l’autre sens, il faut regarder sa feuille dans l’autresens, c’est à dire inverser x et y dans les formules. De y = x2
3, nous tirons la nouvelle
fonction y =√
3x, et nous intégrons ça entre 1 et 0 :
V = π∫ 1
2(4 − x2) + π
∫ 0
13x =
19π
6. (10.87)
Correction de l’exercice 19À tous les coups, la formule à utiliser est la formule (2.8), la seule vraie difficulté
est de calculer l’intégrale.
a. Ici, y′(x) = −2x/(1 − x2), et nous devons calculer l’intégrale
l =∫ 1/2
0
√√√√1 +
4x2
(1 − x2)2
=∫ 1/2
0
√√√√
(x2 + 1)2
(1 − x2)2
=∫ 1/2
0
x2 + 11 − x2
.
(10.88)
La division euclidienne de x2 + 1 par −x2 + 1 donne que
x2 + 11 − x2
= −1 +2
1 − x2, (10.89)

102 CHAPITRE 10. CORRECTIONS
de telle sorte que la longueur demandée vaut
l =∫ 1/2
0−1 +
∫ 1/2
0
21 − x2
= [ln(1 + x) + 1 − x − ln(1 − x)]1/20
= ln(3) − 12
.
(10.90)
b. La longueur d’arc de y = x3/2 avec 0 ≤ x ≤ 5. L’intégrale à calculer est
l =∫ 5
0
√
1 +(3
2x1/2
)2
dx =∫ 5
0
√
1 +9x
4dx. (10.91)
Cette intégrale s’effectue en faisant le changement de variables t = 1 + 9x4
,dx = 4
9dx, ce qui amène à
∫ √t49
dt =49
t3/2
3/2=
827
(
1 +9x
4
)3/2
, (10.92)
et donc
l =827
[(
1 +9x
4
)3/2]5
0
=33527
. (10.93)
Correction de l’exercice 20La difficulté est de savoir entre quelle et quelle borne du paramètre t se situe
un « arc » de cycloïde. Manifestement, la fonction x(t) n’est pas périodique, etmême croissante. La fonction y(t), par contre, est périodique de période 2π. Notezque la vitesse de la courbe
v = (x(t), y(t)) = a(1 − cos(t), sin(t)) (10.94)
a pour norme‖v‖ = 2a2
(
1 − cos(t))
, (10.95)
s’annule précisément tous les 2π. Nous prenons donc cela comme un bras de cy-cloïde, et d’ailleurs, le graphe de la figure 10.3 nous montre bien comment ça sepasse. En utilisant la formule de trigonométrie 1 − cos(t) = 2 sin2 x
2, et la formule
de la longueur d’arc (2.10), nous avons la longueur donnée par
l = |a|√
2∫ 2π
0
√
1 − cos(t) = 2|a|∫ π
0| sin(u)|2du = 4|a|
∫ π
0sin(u)du (10.96)

103
Figure 10.3 – La cycloïde.
où nous avons utilisé le changement de variable u = x2, ainsi que supprimé la valeur
absolue parce que la fonction sinus est toujours positive entre 0 et π. La longueurde l’arc est donc
l = 4a [− cos(u)]π0 = 8a, (10.97)
et donc a = 1 répond à la question.
Correction de l’exercice 21La surface demandée est donnée par
S = 2π∫ 2
0
√1 + 4 2xdx = 2π2
√5
[
x2
2
]2
0
= 8π√
5. (10.98)
Correction de l’exercice 22
a. La courbe 4y = x3 s’écrit tout aussi bien y = x3
3, et la surface de révolution
correspondante est
S = 2π∫ 1
0
√√√√1 +
(
3x2
4
)2x3
4dx (10.99)
Le changement de variable miracle qu’il faut voir est u = 1 + 9x4
16, parce que
dx = 1627
1x3 du, ce qui fait que les x3 se simplifient et l’intégrale à calculer
devient
2π∫ √
udu =8π
27u3/2
3/2=
π
3 · 27
(
1 +9x4
16
)3/2
. (10.100)
Nous avons donc
S =4π
27
[(
1 +9x4
16
)]1
0
=61π
432. (10.101)
b. La courbe donnée est
x =2 ln(y) − y2
4. (10.102)
Il est important d’écrire x = x(y), et non y = y(x) comme d’habitude, parceque nous allons maintenant faire une rotation le long de l’axe Oy au lieu

104 CHAPITRE 10. CORRECTIONS
de Ox. Cela fait qu’il faut changer x ↔ y dans toutes les formules utiliséesd’habitude.
I(y) =∫
√√√√√1 +
2y
− 2y
4
22 ln(y) − y2
4du
=∫
y2 + 12y
(
2 ln(y) − y2
4
)
dy
=∫ y ln(y)
4dy +
∫ ln(y)4y
dy − y3
8− y
8.
(10.103)
La seconde intégrale est une intégrale remarquable : c’est∫
ff ′ avec f = ln,donc l’intégrale vaut ln(y)2
2. La seule difficulté qui reste est de calculer
J =∫
y ln(y)dy. (10.104)
Pour cela, nous faisons par partie :
u = ln(y) dv = y
du =1y
dy v =y2
2.
(10.105)
Alors, nous avons
J =y2 ln(y)
2− 1
2
∫
ydy =y2 ln(y)
2− y2
4. (10.106)
En remettant les bouts ensemble,
I(y) =y2 ln(y)
8− y2
8+
ln(y)2
8− y4
32, (10.107)
et la surface demandée vaut
S = 2π(
I(3) − I(1))
=π
4
(
ln(3)2 + 9 ln(3) − 28)
. (10.108)
Correction de l’exercice 23La surface générée par la révolution de la courbe y = 1/x autour de l’axe Ox
entre 1 et l’infini est donnée par
S = 2π∫ ∞
0
√
1 +(
− 1x2
)2 1x
dx = 2π∫ ∞
0
√x4 + 1x3
dx. (10.109)

105
Lorsque x est grand, x4 + 1 est à peu près comme x4, et donc le numérateur està peu près comme x2. Donc, lorsque x est grand, la fonction sous l’intégrale secomporte comme 1/x, dont l’intégrale diverge.
Nous concluons que la surface est infinie.En ce qui concerne le volume, le calcule est simple :
V = π∫ ∞
0
1x2
dx = π[
−1x
]∞
1= π, (10.110)
donc il y a un volume fini, entouré par une surface infinie.
Correction de l’exercice 24
a. En mettant tous les y à gauche et tous les x à droite, et en utilisant le faitque y′ = dy/dx, nous trouvons
y′
y= − x√
1 − x2
dydx
y= − x√
1 − x2
dy
y= − x√
1 − x2dx
(10.111)
En prenant l’intégrale des deux côtés, nous avons
ln(y) =√
1 − x2 + C, (10.112)
donc la solution s’écrit
y(x) = e√
1−x2+C = Ke√
1−x2, (10.113)
si K = eC .Remarque : étant donné que K = eC , on pourrait croire que la solution n’estvalable que pour K positif. En réalité il n’en est rien parce que l’équation(10.112) devrait contenir une valeur absolue de y.
b. L’équation (1 − y2)dy − ydx se récrit sous la forme
1 − y2
ydy = dx, (10.114)
qui peut être intégrée des deux côtés :
x =∫ 1 − y2
ydy = ln(y) − y2
2, (10.115)
donc la solution est 2 ln(y) − y2 = 2x + C.Note : nous n’avons pas la solution sous la forme y = y(x), mais sous laforme x = x(y). . . la vie ne peut pas être parfaite !

106 CHAPITRE 10. CORRECTIONS
Correction de l’exercice 25
a. L’équation est
y′ =−4y
x. (10.116)
En posant y = xz et y′ = z + xz′, nous trouvons
z + xz′ =−4xz
x= −4z
xz′ = −5z
z′
z= −5
x,
(10.117)
ce qui fait ln(z) = −5 ln(x) + C, que l’on remet dans la variable y :
y = Kx−4. (10.118)
b. En divisant par dx, l’équation devient (2x + 3y) + (y − x)y′ = 0, que l’onremet sous la forme
y′ =3y + 2x
x − y. (10.119)
Comme indiqué dans la méthode générale pour ce genre d’équations, il fautposer u = y/x, c’est à dire y = ux et y′ = u + xu′, ce qui donne
u + xu′ =3ux + 2x
x − ux=
3u + 21 − u
xu′ =3u + 21 − u
− u
xdu
dx=
u2 + 2u + 21 − u
.
(10.120)
Ici, la subtilité est de remettre tous les u d’un côté et tous les x de l’autre,y compris les du et dx. Ce que l’on obtient est
1 − u
u2 + 2u + 2du =
dx
x, (10.121)
qui peut être intégré 1 des deux côtés :
ln(x) + K = 2 arctan(u + 1) − 12
ln(u2 + 2u + 2). (10.122)
1. Voir le rappel 2.1.1.

107
Nous remettons maintenant les y au lieu des u et, en utilisant les propriétésdes logarithmes,
K = ln(y2 + 2xy + 2x2) − 4 arctan(
y + x
2
)
. (10.123)
Il est à remarquer qu’il n’est pas possible d’isoler y dans cette expression.Nous ne pouvons donc pas donner la solution sous le forme explicite y = y(x).Cela arrive souvent dans le cadre des équations différentielles.
Correction de l’exercice 26
a. L’équation y′ + 2xy = 4x est une équation linéaire, donc nous commençonspar trouver la solution générale de l’équation homogène :
y′H = −2xyH
y′H
yH= −2x,
(10.124)
et donc yH(x) = Ce−x2.
Affin de trouver maintenant la solution générale de l’équation non homogène,nous utilisons la méthode de variations des constantes, c’est à dire que nouscherchons la solution sous la forme y(x) = K(x)e−x2
.En remettant cette expression pour y dans l’équation originale, nous tombonssur une équation pour K. Notez que tous les termes contenant K non dérivés’annullent :
K ′ = 4xex2
, (10.125)
dont la solution est K(x) = 2ex2+ C, ce qui donne
y(x) =(
2ex2
+ C)
e−x2
= 2 + Ce−x2
. (10.126)
comme solution générale en y.
b. Nous commençons par résoudre l’équation homogène
y′H
yH=
1x − 2
(10.127)
dont la solution générale est
yH(x) = C(x − 2). (10.128)
Afin de résoudre l’équation non homogène, nous utilisons la méthode devariation des constantes, qui donne C ′ = 2(x − 2) comme équation pourC(x). La solution est C(x) = x2 − 4x + K et donc nous avons
y(x) = (x2 − 4x + K)(x − 2). (10.129)

108 CHAPITRE 10. CORRECTIONS
c. L’équation homogène, y′H + yH cotg(x) = 0, se résous en sachant qu’une
primitive de cotg(x) est ln(
sin(x))
. La solution de l’homogène est donc
yH(x) =K
sin(x). (10.130)
La méthode de variation des constantes demande donc de substituer
y(x) =K(x)sin(x)
y′(x) =K ′(x)sin(x)
− K(x) cos(x)sin2(x)
(10.131)
dans l’équation non homogène. Encore une fois, les termes en K non dérivésse simplifient et nous restons avec
K ′(x) = 5 sin(x)ecos(x), (10.132)
donc la solution est K(x) = −5ecos(x). La solution au problème posé est donc
y(x) =−5ecos(x)
sin(x). (10.133)
Correction de l’exercice 27
a. Nous substituons y(x) = cos(x) et y′(x) = − sin(x) dans l’équation, et noustrouvons
− sin(x) + cos(x)f(x) = sin(x), (10.134)
d’où nous déduisons f(x) = 2 tan(x).
b. Nous avons donc l’équation différentielle
y′ + 2y tan(x) = sin(x) (10.135)
à résoudre. C’est une équation linéaire, donc nous commençons par l’ho-mogène associée : y′
H + 2yH tan(x) = 0 qui se transforme en
y′H
yH= −2 tan(x), (10.136)
et dont la solution est
yH(x) = Ke−2 ln(1/ cos(x)) = K cos2(x). (10.137)

109
Nous trouvons la solution générale de l’équation non homogène par la méth-ode de variations des constantes. Nous posons dons
y(x) = K(x) cos2(x), y′(x) = K ′ cos2(x) − 2K cos(x) sin(x) (10.138)
et nous injectons cette fonction dans l’équation de départ. Après simplifica-tions, il ne reste qu’une équation pour K :
K ′(x) =sin(x)cos2(x)
, (10.139)
dont la solution est K(x) = 1cos(x)
+ C, ce qui donne la solution générale del’équation de départ :
y(x) =
(
1cos(x)
+ C
)
cos2(x) = cos(x)(
1 + C cos(x))
. (10.140)
c. Un tout petit peu de calcul montre que
y′(π/4) = − 1√2
− C, (10.141)
qui s’annule lorsque C = − 1√2. La solution demandée est donc
y(x) = cos(x)(
1 +cos(x)√
2
)
. (10.142)
Correction de l’exercice 28Les minima et maxima de y(x) sont là où y′(x) = 0, donc dans la partie du
plan où xy = 1. L’angle sous lequel y(x) coupe l’axe Oy est donné par la dérivéeen 0, c’est à dire par y′(0). Par l’équation, nous voyons que y′(0) = −1.
L’angle sous lequel la solution y(x) coupe l’axe Ox est donné par y′(x0) où x0
est tel que y(x0) = 0. Nous avons y′(x0) = x0y(x0) − 1 = −1.
Correction de l’exercice 29Les solutions passant par le point (x, y) seront croissantes en ce point si y′(x) >
0, c’est à dire si sin(x2 + y2) > 0. Petit dessin à la figure 10.4
Correction de l’exercice 30Le changement de fonction inconnue y(x) = t(x)
xinduit le changement suivant
pour la dérivée :
y′(x) =1x
(
t′ − t
x
)
, (10.143)

110 CHAPITRE 10. CORRECTIONS
|√π
|√2π
|√3π
Figure 10.4 – Les zones achurées sont là où les solutions sont croissantes.
que nous substituons dans l’équation proposée 2. Nous trouvons
t
x(1 − t) − x(1 + t)
1x
(
t′ − t
x
)
= 0
t − t2
x− (1 + t)(xt′ − t)
x= 0
−xt′(1 + t) + 2t = 0
(1 + t)2t
t′ =1x
.
(10.144)
où nous avons fait une simplification par x. La solution que nous allons obtenirn’est donc pas censée être valable en x = 0. Ici, et dans tout le chapitre sur leséquations différentielles, nous ne discutons pas le domaine de validité des solutions.
En passant le dx de l’autre côté, et en intégrant des deux côtés,
∫ (1 + t)2t
dt =∫ dx
x. (10.145)
Nous avons donc ln(x)+C = ln(t)2
+ t2. Ici, nous allons faire quelque chose de subtil.
La constante C peut valoir n’importe quoi, donc il n’y a pas de mal à changer deconstante et écrire C = ln(K) où K est une nouvelle constante. Alors, dans lemembre de gauche nous avons ln(x) + ln(K) = ln(Kx). Cette manipulation a fait« rentrer » la constante dans le logarithme.
Nous faisons de même avec le dénominateur 2 du membre de droite : nous lefaisons passer à gauche, et nous le rentrons dans le logarithme sous forme d’un
2. Le verbe « proposer » est évidement un euphémisme.

111
carré, nous avons doncln(Kx2) = ln(t) + t, (10.146)
donc, en prenant l’exponentielle des deux côtés,
Kx2 = eln(t)et = xyexy
Kx = yexy.(10.147)
Encore une fois, nous ne pouvons pas écrire la solution sous forme explicite y =y(x).
Correction de l’exercice 31L’équation donnée étant une équation linéaire nous résolvons d’abord l’équation
homogène associée :y′
H +yH
1 + x= 0. (10.148)
En remettant les yH d’un côté et les x de l’autre et en intégrant, nous trouvons lasolution générale de l’homogène sous la forme
yH(x) =C
1 + x. (10.149)
La méthode de variation des constantes demande d’introduire
y(x) =C(x)1 + x
y′(x) =C ′(x)1 + x
− C(x)(1 + x)2
(10.150)
dans l’équation de départ. Les termes en C non dérivés se simplifient, et nousrestons avec
C ′(x) = x(1 + x), (10.151)
que nous intégrons immédiatement : C(x) = x2
2+ x3
3+ K, et donc
y(x) =3x2 + 2x3 + K
6(1 + x). (10.152)
Nous pouvons résoudre les conditions initiales sans dériver (10.152). En effet,l’équation de départ dit que y′(0) + y(0)
1+0= 0. En demandant y′(0) = 1, cette
équation dit que y(0) = K/6. Nous posons maintenant x = 0 dans (10.152) etnous demandons que le résultat soit −1. Ce que nous trouvons est k = −6, et doncla solution
y(x) =3x2 + 2x3 − 6
6(1 + x). (10.153)

112 CHAPITRE 10. CORRECTIONS
Correction de l’exercice 32L’équation différentielle à résoudre est y′(x)2 = xy. Cela se résous en prenant
la racine carré des deux côtés, et en ramenant les y d’un côté et les x de l’autre :
dy√y
= ±√
xdx. (10.154)
Cette équation peut être intégrée des deux côtés. Cela donne
y(x) =
(
x3/2
3+ C
)2
. (10.155)
En particulier, y(1) =(
13
+ C)2
, donc pour que y(1) = 1, il faut C = 23
ou bienC = −4
3.
Correction de l’exercice 33
a. Le polynôme caractéristique est x2 − 2x − 3 = 0, et ses solutions sont
λ1 = 3
λ2 = −1,(10.156)
donc les solutions de l’équation sont données par
y(x) = Ae3x + Be−x (10.157)
avec A, B ∈ R.
b. Le polynôme caractéristique est x2 + 4x + 4 = 0, et sa racine est
λ1 = λ2 = −2. (10.158)
C’est une racine double. Dans le cas d’une racine double, les solutions « debase » de l’équation différentielle sont y1(x) = eλx et y2(x) = xeλx. Dansnotre cas,
y(x) = Ae−2x + Bxe−2x. (10.159)
c. Cette fois, les racines du polynôme caractéristique λ2 − 4λ + 5 = 0 sontcomplexes :
4 ±√
16 − 202
= 2 ± i. (10.160)
Les solutions de base de l’équation différentielle sont donc y1(x) = e(2+i)x ety2(x) = e(2−i)x. Ce sont des solutions complexes, et il existe une astuce pour

113
en extirper les solutions réelles. D’abord, nous séparons les parties réelles etimaginaires dans les exponentielles :
e(2+i)x = e2xeix, (10.161)
et ensuite, nous utilisons la formule d’Euler eiωx = cos(ωx) + i sin(ωx) :
y1(x) = e2x(
cos(x) + i sin(x))
y2(x) = e2x(
cos(x) − i sin(x))
.(10.162)
Nous savons que toutes les combinaisons de y1 et y2 sont des solutions del’équation différentielle. Les combinaisons qui nous intéressent sont les com-binaisons qui ne contiennent plus de nombres complexes. Il n’est pas trèsdifficile de les trouver :
y1(x) + y2(x) = 2e2x cos(x), (10.163)
eti(
y1(x) − y2(x))
= −2e2x sin(x). (10.164)
Les solutions réelles de l’équation sont donc
y(x) = Ae2x cos(x) + Be2x sin(x). (10.165)
d.y(x) = Ae3x + Bex (10.166)
e. Les racines du polynôme caractéristique sont λ1 = 1/2 et λ2 = 0. Pourrappel, e0 = 1, donc la seconde racine ne donne pas lieu à une exponentielledans la solution :
y(x) = Aex/2 + B (10.167)
f. Les solutions complexes sont
y1(x) = e−2i
y2(x) = e2i(10.168)
Nous en extirpons les solutions réelles en en prenant la somme et la différencemultipliée par i. Nous avons donc la solution réelle générale
y(x) = A cos(2x) + B sin(2x). (10.169)

114 CHAPITRE 10. CORRECTIONS
g. Cet exemple est justement traité dans une introduction à Maxima 3. Lessolutions complexes sont données par
y1(x) = exp(−1 +
√3i
2x)
y2(x) = exp(−1 −
√3i
2x)
(10.170)
Les solutions réelles sont
y1(x) = e−x/2 cos(
√3
2x)
y2(x) = e−x/2 sin(
√3
2x)
(10.171)
h. Le polynôme caractéristique admet la racine double λ = −1. La solutiongénérale est donc
y(x) = Ae−x + Bxe−x. (10.172)
i. Nous avons λ1 = 5 et λ2 = 2, donc
y(x) = Ae5x + Be2x. (10.173)
j. Racine double λ = −3/2, donc
y(x) = Ae−3x/2 + Bxe−3x/2. (10.174)
Correction de l’exercice 34
a. Le polynôme caractéristique est
λ2 + 10λ + 16 = 0, (10.175)
dont les racines sont λ1 = −8 et λ2 = −2. La solution générale s’écrit donc
y(x) = ae−8x + Be−2t. (10.176)
Il faut maintenant fixer les paramètres A et B pour que y(0) = 0 et y′(0) =12. Pour ce faire, nous calculons y(x) :
y′(x) = −8Ae−8x − 2Be−2x. (10.177)
3. http://michel.gosse.free.fr/documentation/introduction/node6.html

115
Nous avons donc les contraintes suivantes sur A et B : y(0) = A + B = 1 ety′(0) = −8A − 2B = 12. Cela est un petit système de deux équations à deuxinconnues que nous résolvons facilement :
A = −73
B =103
(10.178)
La solution répondant aux conditions posées est donc
563
e−8x − 203
e−2x. (10.179)
b. Les solutions du polynôme caractéristique sont λ1 = 3 + i et λ2 = 3 − i. Lapremière chose à faire est de trouver les solutions réelles qui en découlent.Elles sont
y(x) = Ae3x sin(x) + Be3x sin(x). (10.180)
Il faut maintenant fixer A et B pour que y(0) = 1 et y′(0) = 4. Le systèmed’équation à résoudre est
{
B = 1 (10.181a)
3B + A = 4. (10.181b)
La réponse est A = 1 et B = 1.
c. L’équation caractéristique est λ2 + 9 = 0, et les racines sont λ = ±3i. Lessolutions de l’équation différentielle sont donc les fonctions de la forme
y(x) = A cos(3x) + B sin(3x). (10.182)
Étant donné que y(π3) = 0, nous trouvons −A = 0 et la condition y′(π
3) = 1
donne −3B = 0, donc en réalité A = B = 0 et la solution à l’équationrépondant aux conditions posées est la fonction identiquement nulle :
y(x) = 0. (10.183)
Correction de l’exercice 35
a. La solution à l’équation sans second membre est yH(x) = Aex + Be4x. Nousdevons maintenant trouver une solution particulière à l’équation avec unsecond membre. Comme le second membre est un polynôme, nous essayonsun polynôme, soit yP (x) = ax + b. Nous calculons
y(x) = ax + b
y′(x) = a
y′′(x) = 0,
(10.184)

116 CHAPITRE 10. CORRECTIONS
et nous remettons dans l’équation de départ :
0 − 5a + 4(ax + b) = 3 − 2x. (10.185)
Cela est une équation pour a et b dont la solution est a = −1/2 et b = 1/8.La solution particulière que nous avons trouvée est
yP (x) = −x
2+
18
, (10.186)
d’où nous déduisons que la solution générale à l’équation donnée est
y(x) = Aex + Be4x − x
2+
18
. (10.187)
b. Le polynôme caractéristique de l’équation sans second membre est λ2 −6λ +13 = 0, et ses racines sont 3 ± 2i. La solution réelle générale de l’équationsans second membre est
yH(x) = e3x(
A cos(2x) + B sin(2x))
. (10.188)
Reste à trouver une solution particulière. Étant donné que le second membreest une constante, nous essayons une constante. Il est facile de voir que lafonction constante yP (x) = 3 fonctionne.
c. La solution générale de l’équation sans second membre est
yH(x) = Aex + Bxex (10.189)
Le second membre étant une exponentielle, nous sommes incités à essayer aex
comme solution particulière. Hélas, cela ne fonctionne pas parce que cela estune solution de l’équation sans second membre. Alors nous devons trouverquelque chose de plus complexe. L’essai que nous faisons est
yP (x) = (ax2 + bx + c)ex. (10.190)
Étant donné que ex et xex sont des solutions de l’équation sans second mem-bre, il est couru d’avance que les termes (bx + c)ex ne vont pas jouer. Nouspouvons donc déjà poser b = c = 0. Nous avons donc
yP (x) = ax2ex
y′P (x) = 2axex + ax2ex
y′P (x) = (2ax + 2a + ax2 + 2ax)ex.
(10.191)
En remettant tout ça dans l’équation de départ, nous trouvons une équationpour a que nous résolvons. La réponse est que une solution particulière estdonnée par yP (x) = 3x2ex.

117
d. L’équation sans second membre est y′′ + 4y = 0, dont l’équation caractéris-tique est λ2 + 4 = 0. Les solutions sont ±2i, et donc les solutions réellessont
yH(x) = A cos(2x) + B sin(2x). (10.192)
Il s’agit maintenant de trouver une solution particulière. Comme le secondmembre est cos(2x), nous voudrions essayer
yP (x) = a cos(2x) + b sin(2x), (10.193)
mais cela ne va pas fonctionner parce que sin(2x) et cos(2x) sont déjà dessolutions de l’équation sans second membre. Nous essayons alors
yP (x) = ax cos(2x) + bx sin(2x). (10.194)
Afin de fixer les constantes a et b, nous injectons cette fonction dans l’équa-tion. Pour cela nous commençons par en calculer les dérivées :
y′P (x) = sin(2x)(−2ax + b) + cos(2x)(2bx + a), (10.195)
ety′′
P (x) = sin(2x)(−4bx + −4a) + cos(2x)(−4ax + 4b). (10.196)
L’équation devient donc
y′′P (x) + 4y′
P (x) = −4(a sin(2x) − b cos(2x)) = cos(2x). (10.197)
Il faut donc choisir a = 0 et b = 1/4. La solution particulière que nous venonsde construire est donc
yP (x) =x
4cos(2x), (10.198)
et la solution générale à l’équation qui nous intéresse est
y(x) = A cos(2x) + B sin(2x) +x
4cos(2x). (10.199)
Correction de l’exercice 36
a. La solution générale de l’équation différentielle sans second membre est
yH(x) = A + Be2x. (10.200)
Pour trouver une solution particulière de l’équation avec second membre,nous essayons yP (x) = ax2 + bx. En injectant cet essai dans l’équation dif-férentielle, nous trouvons une équation pour a et b dont la solution donne
yP (x) = −x2
2− x
2. (10.201)

118 CHAPITRE 10. CORRECTIONS
La solution générale de l’équation différentielle avec second membre est donc
y(x) = A + Be2x − x2
2− x
2. (10.202)
La première condition à poser sur A et B est y(0) = B + A = 2. Pour laseconde, nous commençons par calculer y′(x) :
y′(x) = 2e2xB − t − 12
. (10.203)
La second condition à imposer est donc
y′(0) = 2B − 12
= 0. (10.204)
En résolvant ce petit système algébrique, nous trouvons les valeurs de A etB qui conviennent : A = 3/4 et B = 1/4.
b. La solution de l’équation différentielle sans second membre est yH(x) =Ae3x + Bxe3x. Pour trouver une solution particulière, il est certain que(ax + b)e3x ne va pas fonctionner parce que c’est solution de l’équation sanssecond membre. Il faut donc prendre un degré plus haut. On essaye doncyP (x) = ax4 + bx3. En remettant dans l’équation de départ, nous trouvonsles valeurs de a et b :
yP (x) =x4
12. (10.205)
La solution générale à l’équation donnée est donc
y(x) = Ae3x + Bxe3x +x4
12e3x. (10.206)
Nous devons maintenant trouver les bonnes constantes A et B dans les sit-uations demandées.
(a) Nous voulons une tangente au point (0, 1), donc en particulier il fautque la courbe passe par là. Donc nous posons la première contrainte :y(0) = 1. Ensuite, nous demandons que le coefficient angulaire de latangente en ce point soit nul, c’est à dire que y′(0) = 0. Cela pose laseconde contrainte :
y′(0) = 0 =112
(12B), (10.207)
donc B = 1. La solution demandée est donc
y(x) = e3x + xe3x +x4
12e3x. (10.208)

119
(b) Cette fois, il faut résoudre les contraintes
y(1) = 0
y′(1) =e3
4.
(10.209)
La réponse est que A = 0 et B = −1/12, et la solution demandée àl’équation différentielle est
xe3x
12(x3 − 1). (10.210)
Correction de l’exercice 37<++>
Correction de l’exercice 38<++>
Correction de l’exercice 39Un dessin se trouve à la figure 10.5. Considérons un point
(
x, y(x))
sur la
ba
βα
Figure 10.5 – La tengente et la droite qui lie à l’origine pour l’exercice 39.
courbe. Nous nommons β l’angle que fait la droite joignant ce point à l’origine,par définition,
tan(β) =y(x)
x. (10.211)
Si α est l’angle que fait la tangente avec l’axe Ox, alors
tan(α) = y′(x). (10.212)
La condition imposée est α + β = 90. Un peu de trigonométrie montre que
tan(β) = tan(90 − α) =1
tan(α), (10.213)

120 CHAPITRE 10. CORRECTIONS
et doncy′(x) =
x
f(x)(10.214)
est l’équation différentielle à résoudre. Nous la remettons sous la forme
dy
dx=
x
y, (10.215)
ou encore : ydy = xdx, d’où la solution
y2 = x2 + C. (10.216)
Correction de l’exercice 40<++>
Correction de l’exercice 41
a. Ici la méthode des chemins pour est particulièrement éclairante. Regardonsd’abord la fonction sur la droite x = y. Nous avons
f(x, y) =x − x
2x= 0. (10.217)
Donc la fonction est nulle sur toute la ligne.Si nous regardons maintenant la ligne verticale x = 0, nous avons
f(0, y) =−y
y= −1, (10.218)
donc la fonction vaut −1 sur toute la ligne verticale. Regardez la figure 10.6
b.
c. Regardons la technique des coordonnées polaires. Nous remplaçons x parr cos(θ) et y par r sin(θ) :
f(r, θ) =r4 cos(θ) sin3(θ)
r2= r2 cos(θ) sin3(θ). (10.219)
Cette fonction tend vers zéro quand r → 0. Nous avons donc
lim(x,y)→(0,0)
f(x, y) = 0. (10.220)
Pour cet exercice nous pouvons aussi utiliser la règle de l’étau en écrivantd’abord
0 ≤ |f(x, y)| ≤ |x||y3||x2 + y2| . (10.221)

121
Mais on a que |x| ≤√
x2 + y2, |y| ≤√
x2 + y2 et |x2 + y2| =(√
x2 + y2)2
,donc
0 ≤ |f(x, y)| ≤√
x2 + y2(√
x2 + y2)3
(√x2 + y2
)2 =(√
x2 + y2)2 → 0. (10.222)
d. En passant aux polaires, nous avons
f(r, θ) =r cos θ sin
(
r sin θ)
r= cos(θ) sin
(
r sin θ)
. (10.223)
La limite de cette dernière fonction lorsque r → 0 vaut zéro.Une autre façon de procéder consiste à multiplier et diviser par y de tellefaçon à faire apparaître sin(y)/y dont nous connaissons la limite :
f(x, y) =sin(y)
y·
xy√x2 + y2
. (10.224)
La limite du premier facteur est 1, tandis que le second peut être traité defaçon classique en prenant la valeur absolue et en majorant |x| par
√x2 + y2.
1
−1
1−1
Figure 10.6 – Sur toute la ligne rouge, la fonction vaut zéro, tandis que sur laligne bleue elle vaut −1. Au point (0, 0), les deux sont inconciliables. Donc la limiten’existe pas.
Correction de l’exercice 42L’énoncé est faux. Pensez à une fonction dont «tous les chemins sauf un» ont
la même limite. Par exemple
f(x, y) =
1 si y 6= 0
0 si y = 0.(10.225)

122 CHAPITRE 10. CORRECTIONS
Cette fonction vaut 1 partout sauf sur une droite. Il y a donc une infinité dechemins suivant lesquels on a une limite en (0, 0) qui vaut 1 (tous les chemins quine passent pas par y = 0). Mais on a un chemin pour lequel la limite est zéro (lechemin horizontal y = 0).
Donc cette fonction n’a pas de limite en (0, 0).Essayez de trouver d’autres exemples. Trouvez un exemple de fonction pour
lequel on a une infinité de chemins pour lesquels la limite est 1 et en même tempsune infinité de chemins pour lesquels la limite est
√2.
Correction de l’exercice 43L’énoncé «étudier la continuité de» revient à demander «vérifier si la limite est
égale à la valeur». Dans le cadre de cet exercice, nous devons simplement calculerles limites des fonctions et voir si ces limites sont égales à la valeur donnée.
a. Regardons la ligne x = y, c’est à dire le chemin (x, y) = (t, t). La limite def le long de ce chemin vaut
limt→0
2t2
t2 + t2= 1, (10.226)
tandis que le long du chemin x = 0 (c’est à dire (0, t)) nous avons
limt→0
0t2
= 0. (10.227)
Les deux limites n’étant pas égales, la limite de f pour (x, y) → (0, 0) n’existepas et a forciori la fonction n’est pas continue.
b. Elle n’est pas continue parce que la limite n’existe même pas. Prenez parexemple le chemin vertical x = 0. Le long de ce chemin, la fonction vautf(0, y) = 1
y2 qui n’a certainement pas de limites pour y → 0.
c. En valeur absolue, cos(1/y) est borné par 1, donc
0 ≤ |f(x, y)| ≤ |y| (10.228)
et donc elle tend vers zéro lorsque (x, y) → (0, 0). Cette fonction est donccontinue.
Correction de l’exercice 44Les courbes de niveau sont données par
y =x2
C, (10.229)

123
1
2
3
4
5
−1
−2
−3
−4
−5
1 2 3−1−2−3
C = −2
C = 2
C = −5
C = 5
Figure 10.7 – Quelque courbes de niveau pour la fonction f(x, y) = x2/y.
sauf la courbe de hauteur zéro qui est l’axe x = 0. Les points y = 0 ne font paspartie du domaine. Certaines courbes sont dessinées sur la figure 10.7.
Étant donné que toutes les courbes de niveau s’intersectent en (0, 0), la limiten’existe pas.
Correction de l’exercice 45La fonction proposée est le produit de sin(x)/x qui reste bornée (et ne tend
pas vers zéro 4) au abords de (0, 0) par la fonction 1y
qui n’est pas bornée, et quin’a pas de limite en (0, 0).
La limite de f n’existe donc pas.
Correction de l’exercice 46Lorsqu’un a un sinus de quelque chose qui tend vers zéro et qu’on ne sait pas
très bien quoi faire, une bonne idée est toujours de multiplier et diviser par ce qui
4. Vers quoi elle tend ?

124 CHAPITRE 10. CORRECTIONS
est dans le sinus. De cette façon, le sinus disparaît. Ici, nous avons
f(x, y) =sin
√x2 + y2
√x2 + y2
·√
x2 + y2 · ln√
x2 + y2. (10.230)
Lors de la limite, le premier morceau est la limite bien connue qui fait 1. Il resteà trouver la limite de la fonction
√
x2 + y2 ln√
x2 + y2. (10.231)
Cette fonction est la composée f(x, y) = (g ◦ r)(x, y) où
r(x, y) =√
x2 + y2
g(t) = t ln(t).(10.232)
Évidement, la limite de r lorsque on tend vers (0, 0) est zéro. Voyons la limite deg(t) lorsque t → 0. Cela se règle en utilisant la règle de l’Hopital :
limt→0
t ln(t) = limt→0
ln(t)1/t
= limt→0
1/r
−1/r2= lim
t→0−t = 0. (10.233)
Donclim
(x,y)→(0,0)f(x, y) = 0. (10.234)
Correction de l’exercice 47Le domaine de définition de f est manifestement l’ensemble de (x, y) tels que
x 6= −y. L’équation de la courbe de niveau de hauteur C est
x2 + y2
x + y= C, (10.235)
c’est à direx2 − Cx + y2 − Cy = 0. (10.236)
Afin de mettre cela sous une forme qui ressemble plus à un cercle, nous reformonsles carrés parfait à partir de x2 + Cx et y2 + Cy. Pour cela, nous cherchons a et btels que
x2 − Cx = (x + a)2 + b. (10.237)
Égalisant les termes de degrés égaux en x, nous trouvons a = −C/2 et b = −C2/4.L’équation de la courbe de niveau (10.237) se met donc sous la forme
(
x − C
2
)2 − C2
4+(
y − C
2
)2 − C2
4= 0 (10.238)

125
Cette dernière équation se récrit avantageusement sous la forme
(
x − C
2
)2
+(
y − C
2
)2
=C2
2, (10.239)
ce qui est le cercle de rayon |C|√2
et de centre (C2, C
2). Notez la valeur absolue dans
le rayon.
1
2
3
−1
−2
−3
1 2 3−1−2−3
Figure 10.8 – Quelque courbes de niveau pour l’exercice 47.
Quelque courbes de niveau sont tracées sur la figure 10.8. Notez qu’elles passenttoutes par (0, 0). En effet, le centre (C/2, C/2) est à une distance
√(
C
2
)2
+(
C
2
)2
=|C|√
2(10.240)
de l’origine. Il est donc hors de question que la limite existe quand (x, y) → (0, 0).
Correction de l’exercice 48
a. Le degré du dénominateur est plus grand que celui du numérateur. Nousnous attendons donc à avoir une limite qui n’existe pas. Prenons le chemin(t, t) par exemple :
f(t, t) =1t, (10.241)
et dont la limite le long de ce chemin n’existe pas.
b. Le point (2, 3) est à l’intérieur du domaine de continuité de la fonction, doncsa limite est égale à la valeur de la fonction au point donné, c’est à dire −5.En pratique, il s’agit juste de remplacer x et y par les valeurs 2 et 3.

126 CHAPITRE 10. CORRECTIONS
c. Un bon chemin à tenter est toujours (t, kt, kt). Nous avons
f(t, kt, kt) =k2 + 2k
1 + 2k2, (10.242)
et donc la limite dépend de k. Deux k différents correspondent donc à deuxchemins le long desquels la limite est différente.La limite n’existe donc pas.
d. Le domaine de continuité de cette fonction est R2 tout entier parce que c’estune fraction de fonctions continues dont le dénominateur ne s’annule pas. Iln’y a donc aucune indéterminations et la limite s’obtient en remplaçant parles valeurs : (π + 1)/2.
e. C’est une limite de polynômes dont le numérateur et le dénominateurs ontle même degré. Utiliser le chemin (t, kt, kt) est en général une bonne idée :le résultat a de bonnes chances de dépendre de k et donc la limite de ne pasexister. Ici nous avons
f(t, kt, kt) =2
1 + 2k2. (10.243)
Cette expression dépend effectivement de k et donc deux k différents corre-spondent à deux chemins le long desquels la limite de f est différente.
f. Le domaine de continuité de cette fonction est tous les points de R2 sauf lespoints avec x = 1 ou y = −2. Étant donné que la limite que l’on demanden’est pas vers un de ces points, nous la calculons en remplaçant les valeurs :
lim(x,y)→(−1,1)
y2 + x
(x − 1)(y + 2)=
0−6
= 0. (10.244)
J’insiste : 0/6 n’est pas une indétermination.
g. Si nous prenons le chemin (t, kt, kt), nous trouvons
limt→0
f(t, kt, kt) = limt→0
1 + 3k3t
k3t2= ∞. (10.245)
La limite de la fonction n’existant pas le long de ces chemins, la fonction n’apas de limite en (0, 0, 0).
h. Grâce au produit remarquable x4 − y4 = (x2 − y2)(x2 + y2), nous pouvonssimplifier la fraction et obtenir f(x, y) = x2 − y2, dont la limite vaut zéro.
i. Le degré du numérateur (3) est plus grand que celui du dénominateur, doncnous partons avec l’idée que la limite va exister et sera zéro. Prouvons cela.D’abord
0 ≤ |f(x, y)| =|x||y|2
x2 + 2y2. (10.246)

127
Ensuite nous utilisons les majorations quasi classiques (mais un peu adaptéesau 2y2) |x| ≤
√x2 + y2 et |y| ≤
√x2 + 2y2. Donc
0 ≤√
x2 + 2y2(√
x2 + 2y2)2
(√x2 + y2
)2 =√
x2 + 2y2, (10.247)
mais la limite de l’expression à droite vaut manifestement zéro. Donc la limitede la fonction est zéro.
j. Prouvons que la limite est nulle (parce que le degré du numérateur estplus grand que celui du dénominateur). Nous majorons la valeur absoluedu numérateur par
|x3 − 2x2y + 3y2x − y3| ≤ |x|3 + 2x2|y| + 3y2|x| + |y|3. (10.248)
Ensuite nous utilisons la majoration |x| ≤√
x2 + y2 (idem pour y) et aprèssimplification nous trouvons
0 ≤ |f(x, y)| ≤ 92
√
x2 + y2, (10.249)
dont la limite vaut zéro.
k. ATTENTION : il ne suffit pas de dire que sur le chemin (t, t) la limite n’existepas. En effet, dans la technique des chemins, on demande que les cheminssoient compris dans le domaine de définition de la fonction. Or aucun pointde la forme (t, t) n’est dans le domaine de définition de f .Pour cette fonction, les droites (t, kt) fonctionnent très bien (penser à rejeterk = 1). En effet,
f(t, kt) =k3t5
t5(k5 − 1)=
k3
k5 − 1, (10.250)
qui dépend de k. Nous avons donc tout plein de chemins qui ont des limitesdifférentes.
l. En utilisant une division euclidienne, nous factorisons le numérateur en
x3 − y3 = (x − z)(x2 + xz + z2), (10.251)
tandis que le numérateur se factorise en (x + z)(x − z). Après simplificationnous trouvons
f(x, y) =x + z
x2 + xz + z2, (10.252)
dont le domaine de continuité contient maintenant le point (1, 1, 1). La limitese trouve donc en remplaçant x, y et z par leurs valeurs. La réponse est 2/3.

128 CHAPITRE 10. CORRECTIONS
m. Nous voyons cette fonction comme composée f = h ◦ g avec
g(x, y) = −xy2
h(t) = et.(10.253)
Ce sont deux fonctions qui sont partout continues, donc la fonction f estpartout continue. De ce fait, la limite se calcule simplement en remplaçantles valeurs. Nous avons e−1.
n. Le domaine d’existence de la fonction est donné par x2 + y2 < 1. Le pointproposé est bien à l’intérieur de ce domaine, donc il suffit de remplacer parles valeurs, on obtient donc
ln√
1 = ln(1) = 0. (10.254)
o. Le chemin (t, 0) donne t2
t2 → 1. Mais le chemin (t, t) donne t2
3t2 → 13. La limite
de la fonction n’existe donc pas.
p. C’est la composée de g(x, y) = (1 + x + 3y)/(3y2 − x) et de h(t) = ln(t).Nous avons que lim(x,y)→(2,−1) g(x, y) = 0, et que la limite du logarithme pourt → 0 est moins l’infini. La limite n’existe donc pas.
q. Cette fonction est la composée f(x, y) = h(
g(x, y))
où g(x, y) = xy et
h(t) =et sin2(t)
t. (10.255)
Il faut donc calculer la limite
limt→0
et sin2(t)t
. (10.256)
Pour ce faire, nous faisons la manipulation suivante :
et sin2(t)t
=et sin2(t)
t
t
t= tet
(
sin(t)t
)2
. (10.257)
Lorsque nous faisons la limite t → 0, la grande parenthèse tend vers 1, tandisque tet → 0.Nous avons donc que la limite de f vaut zéro.Une autre façon de résoudre cet exercice est de multiplier et diviser par xy,de telle façon à faire apparaître le terme
(
sin(xy)xy
)2
(10.258)
dont la limite est 1.

129
r. En remplaçant les valeurs de x et y nous trouvons 16/0, ce qui n’existe pas.Afin de prouver que la limite n’existe effectivement pas, prenons un chemin.Le chemin (t − 2, 1 + t) fait l’affaire :
f(t − 2, 1 + t) =(t − 2)2 − 4(t − 2) + 4
(t − 2)(1 + t) + 2(1 + t) − (t − 2) − 2=
t2 − 8t + 16t2
,
(10.259)dont la limite t → 0 est ∞. La limite de cet exercice n’existe donc pas.
s. Nous pouvons voir la fonction comme composée f = h ◦ g avec
g(x, y) =1
x2 + y2h(t) = e−t. (10.260)
Dans ce cas, la limite de g vaut ∞ et ensuite, e−∞ = 0. Cela fournit la bonneréponse mais la théorème 1 sur lequel se base la méthode des composées nepermet pas de passer l’infini de g à h aussi facilement. La solution pour êtreplus rigoureux est de poser
g(x, y) = x2 + y2h(t) = e−1/t. (10.261)
D’ailleurs, lorsque x et y n’arrivent que dans la combinaison x2 + y2, c’esttoujours une bonne idée de faire une composée de cette façon.Maintenant, la limite de g est zéro et limx→0 e−1/t = 0.
Correction de l’exercice 49Le script Sage suivant (exoDV002.sage) résout l’exercice :
# -*- coding: utf8 -*-
def LesCalculs(f):
print "Pour la fonction %s"%str(f)
print "d_x",f.diff(x).simplify_full()
print "d_y",f.diff(y).simplify_full()
print "d^2_x",f.diff(x).diff(x).simplify_full()
print "d_xd_y",f.diff(x).diff(y).simplify_full()
print "d_yd_x",f.diff(y).diff(x).simplify_full()
print "d^2_y",f.diff(y).diff(y).simplify_full()
print ""
def exercise_DV002():
var(’x,y’)
fa(x,y)=2*x**3+3*x**2*y-2*y**2

130 CHAPITRE 10. CORRECTIONS
fb(x,y)=ln(x*y**2)
fc(x,y)=tan(x/y)
fd(x,y)=x*y**2/(x+y)
LesCalculs(fa)
LesCalculs(fb)
LesCalculs(fc)
LesCalculs(fd)
La sortie est :
Pour la fonction (x, y) |--> 2*x^3 + 3*x^2*y - 2*y^2
d_x (x, y) |--> 6*x^2 + 6*x*y
d_y (x, y) |--> 3*x^2 - 4*y
d^2_x (x, y) |--> 12*x + 6*y
d_xd_y (x, y) |--> 6*x
d_yd_x (x, y) |--> 6*x
d^2_y (x, y) |--> -4
Pour la fonction (x, y) |--> log(x*y^2)
d_x (x, y) |--> 1/x
d_y (x, y) |--> 2/y
d^2_x (x, y) |--> -1/x^2
d_xd_y (x, y) |--> 0
d_yd_x (x, y) |--> 0
d^2_y (x, y) |--> -2/y^2
Pour la fonction (x, y) |--> tan(x/y)
d_x (x, y) |--> 1/(y*cos(x/y)^2)
d_y (x, y) |--> -x/(y^2*cos(x/y)^2)
d^2_x (x, y) |--> 2*sin(x/y)/(y^2*cos(x/y)^3)
d_xd_y (x, y) |--> -(2*x*sin(x/y) + y*cos(x/y))/(y^3*cos(x/y)^3)
d_yd_x (x, y) |--> -(2*x*sin(x/y) + y*cos(x/y))/(y^3*cos(x/y)^3)
d^2_y (x, y) |--> 2*(x^2*sin(x/y) + x*y*cos(x/y))/(y^4*cos(x/y)^3)
Pour la fonction (x, y) |--> x*y^2/(x + y)
d_x (x, y) |--> y^3/(x^2 + 2*x*y + y^2)
d_y (x, y) |--> (2*x^2*y + x*y^2)/(x^2 + 2*x*y + y^2)
d^2_x (x, y) |--> -2*y^3/(x^3 + 3*x^2*y + 3*x*y^2 + y^3)
d_xd_y (x, y) |--> (3*x*y^2 + y^3)/(x^3 + 3*x^2*y + 3*x*y^2 + y^3)
d_yd_x (x, y) |--> (3*x*y^2 + y^3)/(x^3 + 3*x^2*y + 3*x*y^2 + y^3)
d^2_y (x, y) |--> 2*x^3/(x^3 + 3*x^2*y + 3*x*y^2 + y^3)

131
Correction de l’exercice 50<++>
Correction de l’exercice 51Pour prouver la différentiabilité, nous allons prouver que les dérivées partielles
∂xf et ∂yf sont continues. La fonction sera alors différentiable par le théorème 2.
a. Calculons∂f
∂x=
24x2y3(4x2 + y2) − 64x4y3
(4x2 + y3)2
=8x2y3(4x2 + 3y2)
(4x2 + y2).
(10.262)
Cette fonction est continue partout en dehors du point (0, 0) (parce que c’estune fraction de polynômes). Au point (0, 0), elle est également continue parcequ’elle a une limite qui vaut zéro.Attention : ce qui fait la continuité de la dérivée n’est pas le fait que la limitede ∂xf soit zéro, mais simplement le fait que cette limite existe. Le fait qu’icila dérivée vaille numériquement la même chose que la fonction elle-même estune coïncidence.En ce qui concerne l’autre dérivée partielle nous avons la même chose.Les dérivées partielles étant continues, la fonction est différentiable.
b. Pas différentiable.
c. La dérivée partielle dans la direction x est
∂f
∂x= ln
√
x2 + y2 +2x2
√x2 + y2
. (10.263)
La limite du premier terme a l’air problématique, et le second terme tendantsimplement vers zéro, il n’y a aucune chance qu’il compense. Pour en êtresûr, prenons le chemin (t, t) et calculons
limt→0
ln(|t|) +2√2
t. (10.264)
Cette limite n’existe pas.La fonction proposée n’est pas différentiable en (0, 0). Pas besoin de calculerla dérivée partielle par rapport à y.
Correction de l’exercice 52En ce qui concerne ∂yf , il n’y a aucun problème parce que
∂f
∂y(0, 0) = lim
t→0
f(0, t) − f(0, 0)t
= 0 (10.265)

132 CHAPITRE 10. CORRECTIONS
parce que f(0, t) = f(0, 0) = 0 pour tout t 6= 0.La dérivée par rapport à x est plus douteuse parce que f(t, 0) existe (et vaut
0) lorsque a > 0 du fait que ya = 0 se trouve au numérateur, mais f(t, 0) n’existepas lorsque a < 0 parce que ya = 0 se trouve au dénominateur. La limite ne peutdonc pas être calculée et la dérivée partielle ∂xf(0, 0) n’existe pas.
Correction de l’exercice 53
a.
b. Cette fonction n’existe pas sur la droite x = y. Ailleurs elle est un quotientde polynômes et est donc différentiable.
Correction de l’exercice 54(IGNE 1121, 9.3) La fonction f proposée est formée des trois fonctions
f1(x, y) = y sin(x)
f2(x, y) = exy2
f3(x, y) = x2y.
(10.266)
Il s’agit maintenant de calculer toutes les dérivées partielles au point (0, 1) et puisde les mettre en matrice. Nous avons les dérivées partielles
∂f1
∂x= y cos(x)
∂f1
∂y= sin(x)
∂f2
∂x= exy2 ∂f2
∂y= 2yex
∂f3
∂x= 2xy
∂f3
∂y= x2.
(10.267)
En évaluant tout ça au point (0, 1) la matrice jacobienne devient
Jf(0, 1) =
1 01 20 0
. (10.268)
Lorsqu’on calcule f(x + a, x + b) où l’on suppose que a et b sont petits, on a lanotation compacte
f(x + a, y + b) = f(x, y) + J(x, y) ·
(
ab
)
. (10.269)
Ici nous avons évidement x = 0, y = 1, a = 0.01 et b = 0.02 et donc
f(0 + 0.01, 1 + 0.02) ≃ f(0, 1) + (0.01, 0.05, 0) = (0.01, 1.05, 0). (10.270)

133
Correction de l’exercice 55Pour les fonctions à valeurs réelles, la jacobienne n’est autre que le vecteur
gradient, c’est à dire les différentes dérivées partielles mises les unes à côté desautres.
a. Ici nous avons∂f
∂x= y sin(xy) + xy2 cos(xy)
∂f
∂y= x2y cos(xy) + x sin(xy),
(10.271)
et la matrice jacobienne est la matrice ligne(
y sin(xy) + xy2 cos(xy) x2y cos(xy) + x sin(xy).)
(10.272)
b.
c.
Correction de l’exercice 56Nous partons du point (0, 1, 0) et nous faisons un pas (r, s, t). La nouvelle valeur
de la fonction sera approximée par
g(0, 1, 0) + r∂g
∂u(0, 1, 0) + s
∂g
∂v(0, 1, 0) + w
∂g
∂w(0, 1, 0). (10.273)
Nous avonsg(0, 1, 0) = −1
∂g
∂u= v + sin(u)v + 2uv = 1
∂g
∂v= u − cos(u) = −1
∂g
∂w= u2 = 0.
(10.274)
Au final,g(r, 1 + s, t) = −1 + r − s. (10.275)
Correction de l’exercice 57
a. Les dérivées partielles sont faciles :
∂f
∂x= 2
∂f
∂y= 1.
(10.276)

134 CHAPITRE 10. CORRECTIONS
Pour dériver dans une direction, il faut considérer le vecteur de norme 1 dansla direction donnée. Ici ‖v‖ =
√4 + 9 =
√13, et la dérivée demandée vaut
∂f
∂v=
2√13
∂f
∂x+
−3√13
∂f
∂y=
1√13
. (10.277)
b.
c.
d. Les dérivées partielles sont∂f
∂x= ln(y)
∂f
∂y=
x
y.
(10.278)
En y substituant le point x = 2, y = 2, nous avons ∂xf(P ) = ln(2) et∂yf(P ) = 1.Le vecteur normalisé dans la direction v est (1/
√2, −1/
√2). Donc nous avons
∂f
∂v(P ) =
1√2
ln(2) − 1√2
. (10.279)
e. Les dérivées partielles sont
∂f
∂x= yz cos(xyz)
∂f
∂x(P ) = −1
∂f
∂y= xz cos(xyz)
∂f
∂y(P ) = −π
∂f
∂z= xy cos(xyz)
∂f
∂z(P ) = −π
(10.280)
Le vecteur normé dans la direction donnée est v = (2/3, 1/3, 2/3), et ladérivée directionnelle est
∂f
∂v(P ) = −2
3− π. (10.281)
Correction de l’exercice 58La fonction f(x, y) = xy est un exemple qui fonctionne bien parce que
∂f
∂x(x, y) = y. (10.282)
Nous avons alors ∂xf(a, b) = b et ∂xf(b, a) = a qui ne sont pas égaux. Cela prouveque la relation (3.29a) n’est pas correcte.

135
Prouvons maintenant que la relation (3.29b) est vraie. En écrivant la définitionde la dérivée partielle, nous avons
∂f
∂x= lim
h→0
f(a + h, b) − f(a, b)h
= limh→0
f(b, a + h) − f(b, a)h
=∂f
∂y(b, a)
(10.283)
où nous avons utilisé le fait que f(a + h, b) = f(b, a + h).
Correction de l’exercice 59Nous voulons voir ce que ça donne sur f d’ajouter 1 à x pour la fonction
f(x, y) = 60x1/2y1/3 (10.284)
lorsque x = 900.000 et y = 1000. Nous utilisons la formule des accroissements finisavec les dérivées partielles :
f(900.000 + 1, 1000) = (900.000, 1000) + 1 ·∂f
∂x(900.000, 1000). (10.285)
La dérivée partielle vaut∂f
∂x=
602√
xy1/3. (10.286)
En remplaçant avec le nombres donnés, la formule (10.285) donne
f(x, y) = 60 · 300√
10 · 10 = 18.000√
10
(∂xf)(900.000, 1000) =60 · 10
2 · 300√
10=
1√10
.(10.287)
Donc en ajoutant 1000 euros au capital, on n’augmente que de 1/√
10 la produc-tivité.
Correction de l’exercice 60
a. Calculer les dérivées partielles au point (x, y) = (−2, −1) :
∂f
∂x= 8x = −16
∂f
∂y= 18y = −18.
(10.288)

136 CHAPITRE 10. CORRECTIONS
Le plan tangent est donné par
T(−2,−1)(x, y) = 25 + −16(x + 2) − 18(y + 1)
= −16x − 18y − 25.(10.289)
En guise de petite vérification, noter que T(−2,−1)(−2, −1) = 25 = f(−2, −1).Des vecteurs directeurs du plan peuvent être trouvés en prenant deux vecteursdans le plan translaté à l’origine :
U(x, y) = −16x − 18y. (10.290)
Deux points dans le plan U sont par exemple
P1 = (1, 0, −16)
P2 = (0, 1, −18).(10.291)
Pour trouver un vecteur perpendiculaire au plan U nous prenons le produitvectoriel de P1 et P2 :
v = P1 × P2 =
∣∣∣∣∣∣∣
ex ey ez
1 0 −160 1 −18
∣∣∣∣∣∣∣
=
16181
. (10.292)
Toute droite normale au plan est parallèle à ce vecteur.Afin de trouver la droite normale au plan T passant par le point (−2, −1, 25)nous faisons une translation :
r(λ) =
−2−125
+ λ
16181
=
16λ − 218λ − 1λ + 25
. (10.293)
b.
c. Nous commençons par calculer les dérivées partielles qui serviront de «coeffi-cients angulaires» pour le plan tangent. En l’occurrence les dérivées partiellessont
∂f
∂x=
1x + y
∂f
∂y=
−x
xy + y2.
(10.294)
Nous évaluons ces dérivées partielles en (x, y) = (0, 2) :
(∂xf)(0, 2) =12
(∂yf)(0, 1) = 0.(10.295)

137
L’équation du plan tangent est alors
TP (x, y) = f(P ) + x ·∂f
∂x(P ) + (y − 2)
∂f
∂y(P ). (10.296)
Le second terme est nul et il reste
T(0,2)(x, y) = ln(1
2
)
+x
2. (10.297)
Pour trouver la normale, nous allons trouver deux vecteurs dans le plan et enprendre le produit vectoriel. Attention cependant : il faut réellement prendredes vecteurs dans le plan, ce qui est délicat pour ce plan parce qu’il ne passepas par l’origine. Pour éviter tout problèmes, nous commençons par prendrele plan
U(x, y) =x
2. (10.298)
Deux vecteurs de ce plan sont par exemple
v = (1, 0,12
)
w = (0, 1, 0).(10.299)
Le vecteur perpendiculaire est alors donné par le produit vectoriel
u × w =
∣∣∣∣∣∣∣
ex ey ez
1 0 1/20 1 0
∣∣∣∣∣∣∣
=
−1/201
. (10.300)
La droite que nous recherchons est celle qui est parallèle à ce vecteur et quipasse par le point P = (0, 2, 1). L’équation paramétrique est donnée par
r(λ) =
021
+ λ
−1/201
=
−λ/22
1 + λ
. (10.301)
Correction de l’exercice 61Le vecteur directeur qu’on nous donne est
v = P − Q = (−7, 5, 1). (10.302)
Nous devons trouver un point du graphe où le vecteur normal est parallèle à v.Pour ce faire, nous calculons le vecteur normal au point
(
x, y, z(x, y))
pour un(x, y) quelconque, et puis nous fixerons x et y.

138 CHAPITRE 10. CORRECTIONS
Les dérivées partielles de z par rapport à x et y sont
∂z
∂x= 8x
∂z
∂y= 18y.
(10.303)
Au point (x, y) cela donne les deux vecteurs tangents
t1 = (1, 0, 8x)
t2 = (0, 1, 8y).(10.304)
Le vecteur normal est donné par
n = t1 × t2 =
∣∣∣∣∣∣∣
ex ey ez
1 0 8x0 1 18y
∣∣∣∣∣∣∣
=
−8x−18y
1
. (10.305)
Afin que n soit parallèle à v (c’est à dire soit un multiple) nous cherchons àrésoudre l’équation
−751
= λ
−8x−18y
1
. (10.306)
Il faut résoudre cela par rapport à λ, x et y. Il n’y a cependant que x et y qui nousintéressent.
La dernière ligne montre que λ = 1 ensuite les deux autres lignes fournissentles équation
{ −7 = −8x (10.307a)
5 = −18y, (10.307b)
et donc le point recherché est (78, − 5
18).
Correction de l’exercice 62
a. La formule de dérivation des fonctions composées, dans ce cas, devient
∂w
∂x=
∂w
∂u
(
u(x, y), v(x, y))∂u
∂x(x, y) +
∂w
∂v
(
u(x, y), v(x, y))∂v
∂x(x, y).
(10.308)Les calculs donnent
2x cos(v) − u sin(v) = 2x cos(x, y) − (x2 + y2) sin(xy). (10.309)
En ce qui concerne la dérivée dans le sens de y nous avons
∂w
∂y(x, y) = −(x2 + y2)x sin(xy) + 2y cos(xy) (10.310)

139
b. Ici c’est le même jeu, les réponses sont
∂w
∂x= 2xy sin(y) cos(x) + 6y2 sin(x) cos(x) + 2y sin(x) sin(y)
∂w
∂y= 2xy sin(x) cos(y) + 2x sin(x) sin(y) + 6y sin2(x)
(10.311)
Correction de l’exercice 63
a.
b. En ce qui concerne les dérivées de w nous avons
∂w
∂x= yexy
∂w
∂y= xexy
(10.312)
En utilisant la formule de dérivée de fonctions composées, nous trouvons
∂w
∂r= (2rs + s2)er2s+rs2
∂w
∂s= (r2 + 2rs)er2s+rs2
(10.313)
Correction de l’exercice 64La formule de dérivation des fonctions composées s’écrit
∂r
∂u=
∂r
∂x
(
x(u, v, t), y(u, v, t))∂x
∂u(u, v, t)
+∂r
∂y
(
x(u, v, t), y(u, v, t))∂y
∂u(u, v, t),
(10.314)
et le même genre de formules pour ∂r∂v
et ∂r∂t
.Les résultats sont
∂r
∂u= 3 ln(uvt) + 3 +
vt
u,
∂r
∂v= t ln(uvt) +
3u
v+ t,
∂r
∂t= v ln(uvt) +
3u
t+ v
(10.315)
Correction de l’exercice 65Nous utilisons la formule de dérivation des fonctions composées (ici c’est un cas
classique qui n’a même pas plusieurs variables). En utilisant la formule(
ln(f))′
=

140 CHAPITRE 10. CORRECTIONS
f ′/f , nous avons
(
ln(u + v))′
=u′ + v′
u + v=
−e−t + 3t2 + 2t
t3 + t2 + e−t. (10.316)
Correction de l’exercice 66Il s’agit d’une dérivation de fonctions composée. Par exemple la dérivée de x2
par rapport à t est 2xx′. Nous avons alors
d
dt(3x2 + xy) = 6xx′ + x′y + xy′ = 6x(3 + cos(t)) +
(
3 + cos(t))
(t3 + t) + x(3t2 + t).
(10.317)
Correction de l’exercice 67Si nous notons u et v les variables de f , nous écrivons la formule générale
∂F
∂ρ=
∂f
∂u
(
x(ρ, θ), y(ρ, θ))∂x
∂ρ(ρ, θ)+ = frac∂f∂v
(
x(ρ, θ), y(ρ, θ))∂y
∂ρ(ρ, θ)
(10.318)Nous avons
∂f
∂u(u, v) =
1u − v
∂f
∂v(u, v) =
−1u − v
∂x
∂ρ= cos(θ)
∂y
∂ρ= sin(θ),
(10.319)
et donc∂F
∂ρ(ρ, θ) =
1x − y
cos(θ) +−1
x − ysin(θ)
=cos(θ)
ρ(cos θ − sin θ)− sin(θ)
ρ(cos θ − sin θ)
=1ρ
.
(10.320)
Avec le même genre de calculs ;
∂F
∂θ=
sin(θ) + cos(θ)sin(θ) − cos(θ)
. (10.321)
En substituant ρ = 1 et θ = dans l’équation (10.320), nous avons
∂F
∂ρ(0, 1) =
11
= 1. (10.322)
Correction de l’exercice 68En notant u et v les variables de f nous avons
∂F
∂x(0, 0) =
∂f
∂u
(
g(0, 0), 0)∂g
∂x(0, 0) +
∂f
∂v
(
g(0, 0), 0)∂y
∂x. (10.323)

141
Le second terme disparaît parce que ∂xy = 0. En remplaçant chaque morceau parsa valeur, nous trouvons
∂f
∂u(1, 0)
∂g
∂x(0, 0) = −2 · (−1) = 2. (10.324)
Ici, il faut remarquer que les notations de l’énoncé sont faites pour induire enerreur : lorsqu’il est écrit ∂f
∂x, on veut dire «la dérivée de f par rapport à sa
première variable». Ce n’est donc pas le même x que les autres.En ce qui concerne la dérivée de F par rapport à y, il faut faire le même
raisonnement en tenant compte du fait que ∂yy = 1. Le résultat est
∂F
∂y(0, 0) = 2. (10.325)
Correction de l’exercice 69La première dérivée est standard :
w′(x) =∂f
∂u
(
x, g(x))
+∂f
∂v
(
x, g(x))
g′(x) (10.326)
où nous avons implicitement utilisé les faits que ∂x∂x
= 1 et ∂g∂x
= g′(x) parce que gest une authentique fonction de une seule variable.
Pour calculer w′′(x), nous devons calculer la dérivée de tout cela. Allons y petitbout par petit bout. D’abord
[
∂f
∂u
(
x, g(x))]′
=∂2f
∂u2
(
x, g(x))
+∂2f
∂v∂u
(
x, g(x))
g′(x). (10.327)
Ensuite, pour le second terme nous utilisons la règle de Leibnitz (càd (uv)′ =u′v + v′u) :
[
∂f
∂v
(
x, g(x))
g′(x)
]′=
[
∂f
∂v
(
x, g(x))]′
g′(x)
+∂f
∂v
(
x, g(x))
g′′(x).
(10.328)
Enfin,[
∂f
∂v
(
x, g(x))]′
=∂
∂u
(
∂f
∂v
)(
x, g(x))
+∂
∂v
(
∂f
∂v
)(
x, g(x))
g′(x)
=∂2f
∂u∂v
(
x, g(x))
+∂2f
∂v2
(
x, g(x))
g′(x).
(10.329)

142 CHAPITRE 10. CORRECTIONS
La réponse est obtenue en recollant tous les morceaux.
Correction de l’exercice 70<++>
Correction de l’exercice 71<++>
Correction de l’exercice 72<++>
Correction de l’exercice 73<++>
Correction de l’exercice 74<++>
Correction de l’exercice 75<++>
Correction de l’exercice 76Les corrigés sont créés par le script Sage exo101.sage
# -*- coding: utf8 -*-
import outilsINGE
def exercise_10_1_A():
var(’x,y’)
f(x,y)=2-sqrt(x**2+y**2)
print outilsINGE.Extrema(f)
def exercise_10_1_B():
var(’x,y’)
f(x,y)=x**3+3*x*y**2-15*x-12*y
print outilsINGE.Extrema(f)
def exercise_10_1_C():
var(’x,y’)
f(x,y)=x**3/3+4*y**3/3-x**2-3*x-4*y-3
print outilsINGE.Extrema(f)
Des réponses :

143
a. The function :
(x, y) |--> -sqrt(x^2 + y^2) + 2
Derivative x and y :
(x, y) |--> -x/sqrt(x^2 + y^2)
(x, y) |--> -y/sqrt(x^2 + y^2)
Hessian matrix :
[-sqrt(x^2 + y^2)*y^2/(x^4 + 2*x^2*y^2 + y^4) x*y/(x^2 + y^2)^(3/2)]
[ x*y/(x^2 + y^2)^(3/2) -sqrt(x^2 + y^2)*x^2/(x^4 + 2*x^2*y^2
Critical points :
(0, 0)
At (0,0), the Hessian is
power::eval(): division by zero
Ici nous voyons que Sage a du mal à calculer la matrice Hessienne en (0, 0).En effet, nous tombons sur une division par zéro. Pour résoudre l’exercice, ilfaut se rendre compte que la fonction (x, y) 7→
√x2 + y2 est toujours positive
et est nulle seulement au point (0, 0). Donc f est toujours plus petite ou égaleà deux tandis que f(0, 0) = 2. Le point est donc un maximum global.
b. The function :
(x, y) |--> x^3 + 3*x*y^2 - 15*x - 12*y
Derivative x and y :
(x, y) |--> 3*x^2 + 3*y^2 - 15
(x, y) |--> 6*x*y - 12
Hessian matrix :
[6*x 6*y]
[6*y 6*x]
Critical points :
(2, 1)
(1, 2)
(-1, -2)
(-2, -1)
At (2,1), the Hessian is
(12, 6)
(6, 12)
Primary principal minors are [108, 12]
Hessian positive defined
local minimum
At (1,2), the Hessian is
(6, 12)
(12, 6)
Primary principal minors are [-108, 6]

144 CHAPITRE 10. CORRECTIONS
Undefinite Hessian
«selle» point
At (-1,-2), the Hessian is
(-6, -12)
(-12, -6)
Primary principal minors are [-108, -6]
Undefinite Hessian
«selle» point
At (-2,-1), the Hessian is
(-12, -6)
(-6, -12)
Primary principal minors are [108, -12]
Hessian negative defined
local maximum
Petite note sur la façon dont on trouve les points critiques. Le système est{
3x2 + 3y2 − 15 = 0 (10.330a)
6xy − 12 = 0. (10.330b)
De la seconde équation, nous isolons x : x = 2/y. Précisons qu’il n’y a pasde solutions avec y = 0. En remettant le x trouvé en fonction de y dans lapremière équation nous trouvons
12y2
+ 3y2 − 15 = 0, (10.331)
ce qui revient à l’équation bicarrée
3y4 − 15y2 + 12 = 0. (10.332)
En posant u = y2 nous avons u = 4 ou u = 1 (résolution d’une équationdu second degré pour u). Nous avons alors les quatre possibilités y = ±2 ety = ±1. Pour chacune de ces possibilités, la formule x = 2/y fournit le xcorrespondant.
c. The function :
(x, y) |--> 1/3*x^3 - x^2 + 4/3*y^3 - 3*x - 4*y - 3
Derivative x and y :
(x, y) |--> x^2 - 2*x - 3
(x, y) |--> 4*y^2 - 4
Hessian matrix :
[2*x - 2 0]
[ 0 8*y]

145
Critical points :
(3, 1)
(-1, 1)
(3, -1)
(-1, -1)
At (3,1), the Hessian is
(4, 0)
(0, 8)
Primary principal minors are [32, 4]
Hessian positive defined
local minimum
At (-1,1), the Hessian is
(-4, 0)
(0, 8)
Primary principal minors are [-32, -4]
Undefinite Hessian
«selle» point
At (3,-1), the Hessian is
(4, 0)
(0, -8)
Primary principal minors are [-32, 4]
Undefinite Hessian
«selle» point
At (-1,-1), the Hessian is
(-4, 0)
(0, -8)
Primary principal minors are [32, -4]
Hessian negative defined
local maximum
Correction de l’exercice 77Certains corrigés de cet exercice ont étés réalisés par Sage. Le script utilisé est
exo103.sage
# -*- coding: utf8 -*-
import outilsINGE
def exercise_10_3_A():
var(’x,y’)
f(x,y)=x**2+4*x+y**2-2*y

146 CHAPITRE 10. CORRECTIONS
print outilsINGE.Extrema(f)
def exercise_10_3_H():
var(’x,y’)
f(x,y)=exp(x**2+x*y)
print outilsINGE.Extrema(f)
def exercise_10_3_Q():
var(’x,y’)
f(x,y)=exp(x)*sin(y)
print outilsINGE.Extrema(f)
Des réponses :
a. The function :
(x, y) |--> x^2 + y^2 + 4*x - 2*y
Derivative x and y :
(x, y) |--> 2*x + 4
(x, y) |--> 2*y - 2
Hessian matrix :
[2 0]
[0 2]
Critical points :
(-2, 1)
At (-2,1), the Hessian is
(2, 0)
(0, 2)
Primary principal minors are [4, 2]
Hessian positive defined
local minimum
b.
c.
d.
e.
f.
g.
h. The function :
(x, y) |--> e^(x^2 + x*y)
Derivative x and y :

147
(x, y) |--> (2*x*e^(x^2) + y*e^(x^2))*e^(x*y)
(x, y) |--> x*e^(x^2 + x*y)
Hessian matrix :
[(4*x*y*e^(x^2) + y^2*e^(x^2) + 2*(2*x^2 + 1)*e^(x^2))*e^(x*y) (x*y*e^(x^2)
[ (x*y*e^(x^2) + (2*x^2 + 1)*e^(x^2))*e^(x*y)
Critical points :
(0, 0)
At (0,0), the Hessian is
(2, 1)
(1, 0)
Primary principal minors are [-1, 2]
Undefinite Hessian
«selle» point
i.
j.
k.
l.
m.
n.
o.
p.
q. The function :
(x, y) |--> e^x*sin(y)
Derivative x and y :
(x, y) |--> e^x*sin(y)
(x, y) |--> e^x*cos(y)
Hessian matrix :
[ e^x*sin(y) e^x*cos(y)]
[ e^x*cos(y) -e^x*sin(y)]
Critical points :
I’m not able to solve these equations.
I’m not able to solve these equations.
At ( ,I), the Hessian is
I’m not able to solve these equations.
At ( ,I), the Hessian is
I’m not able to solve these equations.
Ici, Sage n’est pas capable de résoudre les équations qui annulent le jacobien.

148 CHAPITRE 10. CORRECTIONS
Les équations à résoudre sont pourtant faciles :{
ex cos(y) = 0 (10.333a)
ex sin(y) = 0 (10.333b)
Étant donné que l’exponentielle ne s’annule jamais, il faudrait avoir en mêmetemps cos(y) = 0 et sin(y) = 0, ce qui est impossible. La fonction n’a doncaucun extrema local.
r.
s.
t.
Correction de l’exercice 78Voici la fonction Sage qui fournit les informations :
# -*- coding: utf8 -*-
import outilsINGE
def exercise_10_4():
var(’x,y’)
f(x,y)=x*y**2*exp(-(x**2+y**2)/4)
print outilsINGE.Extrema(f)
La sortie est
The function :
(x, y) |--> x*y^2*e^(-1/4*x^2 - 1/4*y^2)
Derivative x and y :
(x, y) |--> -1/2*(x^2 - 2)*y^2*e^(-1/4*x^2 - 1/4*y^2)
(x, y) |--> -1/2*(x*y^3 - 4*x*y)*e^(-1/4*x^2 - 1/4*y^2)
Hessian matrix :
[ 1/4*(x^3 - 6*x)*y^2*e^(-1/4*x^2 - 1/4*y^2) 1/4*((x^2 - 2)*y^3 -
[1/4*((x^2 - 2)*y^3 - 4*(x^2 - 2)*y)*e^(-1/4*x^2 - 1/4*y^2) 1/4*(x*y^4 - 10*x*y^2
Critical points :
(r17, 0)
(-sqrt(2), -2)
(sqrt(2), -2)
(-sqrt(2), 2)
(sqrt(2), 2)

149
At (r17,0), the Hessian is
(0, 0)
(0, 2*r17*e^(-1/4*r17^2))
Primary principal minors are [0, 0]
Hessian positive semidéfinite
I don’t conclude
Hessian negative semidefinite
I don’t conclude
At (-sqrt(2),-2), the Hessian is
(4*sqrt(2)*e^(-3/2), 0)
(0, 4*sqrt(2)*e^(-3/2))
Primary principal minors are [32*e^(-3), 4*sqrt(2)*e^(-3/2)]
Hessian positive defined
local minimum
At (sqrt(2),-2), the Hessian is
(-4*sqrt(2)*e^(-3/2), 0)
(0, -4*sqrt(2)*e^(-3/2))
Primary principal minors are [32*e^(-3), -4*sqrt(2)*e^(-3/2)]
Hessian negative defined
local maximum
At (-sqrt(2),2), the Hessian is
(4*sqrt(2)*e^(-3/2), 0)
(0, 4*sqrt(2)*e^(-3/2))
Primary principal minors are [32*e^(-3), 4*sqrt(2)*e^(-3/2)]
Hessian positive defined
local minimum
At (sqrt(2),2), the Hessian is
(-4*sqrt(2)*e^(-3/2), 0)
(0, -4*sqrt(2)*e^(-3/2))
Primary principal minors are [32*e^(-3), -4*sqrt(2)*e^(-3/2)]
Hessian negative defined
local maximum
Notez la présence de r1 comme paramètres dans les solutions. Tous les pointsavec y = 0 sont des points critiques. Cependant, Sage 5 ne parvient pas à conclurela nature de ces points (x, 0).
Notons que le nombre f(x, y) a toujours le signe de x parce que y2 et l’expo-nentielle sont positives. Toujours ? En tout cas lorsque x 6= 0. Prenons un point(a, 0) avec a > 0. Dans un voisinage de ce point, nous avons f(x, y) > 0 parce que
5. ou, plus précisément, le programme que j’ai écrit avec Sage.

150 CHAPITRE 10. CORRECTIONS
si a > 0, alors x > 0 dans un voisinage de a. Le point (a, 0) est un minimum localparce que 0 = f(a, 0) ≤ f(x, y) pour tout (x, y) dans un voisinage de (a, 0).
De la même façon, les points (a, 0) avec a < 0 sont des maxima locaux parceque dans un voisinage, la fonction est négative.
Le point (0, 0) n’est ni maximum ni minimum local. C’est un point de selle.
Correction de l’exercice 79Le calcul de la matrice Hessienne donne
H(x, y) =
(
12x2(cos(y) + 2) −4x3 sin(y)−4x3 sin(y) −(x4 + 1) cos(y)
)
. (10.334)
En (0, 0), cette matrice est semi-définie positive, et nous ne pouvons rien conclure.Il faut donc trouver autre chose.
Afin de prouver qu’un point est un point de selle, la méthode la plus directeest de trouver, dans chaque voisinage, un point où la fonction est plus grande etun point où la fonction est plus petite.
Dans le cas qui nous occupe, g(0, 0) = 3. Est-ce qu’on peut trouver un point(x, y) très proche de (0, 0) tel que g(x, y) > 3 ? Et un autre tel que g(x, y) < 3 ?Supposons que ǫ est petit. Alors
g(ǫ, 0) = 3(ǫ4 + 1) > 3, (10.335)
tandis queg(0, ǫ) = 2 + cos(ǫ) < 3. (10.336)
Correction de l’exercice 80Juste pour rester général, nous allons noter 1000 = A. Ainsi nous verrons si le
résultat dépend du nombre à partager. Si x, y et z sont les nombres, nous avons
z = A − x − y (10.337)
et nous devons maximiser f(x, y) = xyz = xy(A − x − y).Cela se fait avec les méthodes habituelles et la fonction
# -*- coding: utf8 -*-
import outilsINGE
def exercise_10_5():
var(’x,y,A’)
assume(A>0)
f(x,y)=x*y*(A-x-y)
print outilsINGE.Extrema(f)

151
Notez la présence de la ligne
assume(A>0)
qui dit à Sage que A est un nombre positif (ici c’est 1000).La sortie est :
The function :
(x, y) |--> (A - x - y)*x*y
Derivative x and y :
(x, y) |--> A*y - 2*x*y - y^2
(x, y) |--> A*x - x^2 - 2*x*y
Hessian matrix :
[ -2*y A - 2*x - 2*y]
[A - 2*x - 2*y -2*x]
Critical points :
(0, 0)
(0, A)
(A, 0)
(1/3*A, 1/3*A)
At (0,0), the Hessian is
(0, A)
(A, 0)
Primary principal minors are [-A^2, 0]
Hessian negative semidefinite
I don’t conclude
At (0,A), the Hessian is
(-2*A, -A)
(-A, 0)
Primary principal minors are [-A^2, -2*A]
Undefinite Hessian
«selle» point
At (A,0), the Hessian is
(0, -A)
(-A, -2*A)
Primary principal minors are [-A^2, 0]
Hessian negative semidefinite
I don’t conclude
At (1/3*A,1/3*A), the Hessian is
(-2/3*A, -1/3*A)
(-1/3*A, -2/3*A)
Primary principal minors are [1/3*A^2, -2/3*A]

152 CHAPITRE 10. CORRECTIONS
Hessian negative defined
local maximum
Il faut faire un peu le ménage dans toutes les solutions trouvées. Les points avecx ou y qui sont nuls sont à rejeter parce qu’ils ne vont certainement pas maximiserle produit xyz. Reste la solution x = A/3, y = A/3, qui est un maximum local.
La solution du problème est donc (x, y, z) = (A3, A
3, A
3). Il faut couper en trois
parts égales, et cela ne dépend pas du nombre choisi.
Correction de l’exercice 81Si x, y et z sont les dimensions de la boite, la contrainte est xyz = V . La
surface est donnée par
S(x, y, z) = 2xy + 2xz + 2yz, (10.338)
et en posant z = V/xy, nous devons minimiser la fonction
f(x, y) = xy +V
y+
V
x. (10.339)
La maximisation de cette fonction se fait comme d’habitude. Le code Sage est
# -*- coding: utf8 -*-
import outilsINGE
def exercise_10_6():
var(’x,y,V’)
assume(V>0)
f(x,y)=x*y+V/y+V/x
print outilsINGE.Extrema(f)
La sortie est :
The function :
(x, y) |--> x*y + V/x + V/y
Derivative x and y :
(x, y) |--> (x^2*y - V)/x^2
(x, y) |--> (x*y^2 - V)/y^2
Hessian matrix :
[2*V/x^3 1]
[ 1 2*V/y^3]
Critical points :

153
(-2*V^(1/3)/(I*sqrt(3) + 1), 1/2*(I*sqrt(3) - 1)*V^(1/3))
(2*V^(1/3)/(I*sqrt(3) - 1), 1/2*(-I*sqrt(3) - 1)*V^(1/3))
(V^(1/3), V^(1/3))
At (-2*V^(1/3)/(I*sqrt(3) + 1),1/2*(I*sqrt(3) - 1)*V^(1/3)), the Hessian is
(-1/4*(I*sqrt(3) + 1)^3, 1)
(1, 16/(I*sqrt(3) - 1)^3)
Primary principal minors are [-4*(I*sqrt(3) + 1)^3/(I*sqrt(3) - 1)^3 - 1, -1/4*(I*sqrt(3)
Hessian positive defined
local minimum
Hessian negative defined
local maximum
At (2*V^(1/3)/(I*sqrt(3) - 1),1/2*(-I*sqrt(3) - 1)*V^(1/3)), the Hessian is
(1/4*(I*sqrt(3) - 1)^3, 1)
(1, 16/(-I*sqrt(3) - 1)^3)
Primary principal minors are [4*(I*sqrt(3) - 1)^3/(-I*sqrt(3) - 1)^3 - 1, 1/4*(I*sqrt(3)
Hessian positive defined
local minimum
Hessian negative defined
local maximum
At (V^(1/3),V^(1/3)), the Hessian is
(2, 1)
(1, 2)
Primary principal minors are [3, 2]
Hessian positive defined
local minimum
Notez la présence de I qui est la façon dont Sage note le nombre imagi-naire
√−1. Les solutions complexes étant à rejeter, nous ne devons garder que
la dernière : x = y = z = 3√
V
Correction de l’exercice 82En utilisant le théorème de Pythagore, la fonction f s’écrit
f(x, y, z) = x2 + y2 + (z − 2)2, (10.340)
mais comme nous ne nous intéressons qu’aux points tels que z = xy, nous regardonsla fonction
f(x, y) = x2 + y2 + (xy − 2)2. (10.341)
Nous devons étudier les extrema de cette fonction.Le code Sage qui fait les calculs est :

154 CHAPITRE 10. CORRECTIONS
# -*- coding: utf8 -*-
import outilsINGE
def exercise_10_9():
var(’x,y’)
f(x,y)=x**2+y**2+(x*y-2)**2
print outilsINGE.Extrema(f)
La sortie :
The function :
(x, y) |--> (x*y - 2)^2 + x^2 + y^2
Derivative x and y :
(x, y) |--> 2*x*y^2 + 2*x - 4*y
(x, y) |--> 2*(x^2 + 1)*y - 4*x
Hessian matrix :
[2*y^2 + 2 4*x*y - 4]
[4*x*y - 4 2*x^2 + 2]
Critical points :
(I*sqrt(3), -I*sqrt(3))
(-I*sqrt(3), I*sqrt(3))
(-1, -1)
(1, 1)
(0, 0)
At (I*sqrt(3),-I*sqrt(3)), the Hessian is
(-4, 8)
(8, -4)
Primary principal minors are [-48, -4]
Undefinite Hessian
«selle» point
At (-I*sqrt(3),I*sqrt(3)), the Hessian is
(-4, 8)
(8, -4)
Primary principal minors are [-48, -4]
Undefinite Hessian
«selle» point
At (-1,-1), the Hessian is
(4, 0)
(0, 4)
Primary principal minors are [16, 4]

155
Hessian positive defined
local minimum
At (1,1), the Hessian is
(4, 0)
(0, 4)
Primary principal minors are [16, 4]
Hessian positive defined
local minimum
At (0,0), the Hessian is
(2, -4)
(-4, 2)
Primary principal minors are [-12, 2]
Undefinite Hessian
«selle» point
Il faut rejeter les solutions qui contiennent le nombre imaginaire I. Pour lereste, la solution est là.
Le point délicat est de résoudre les équations{
(y2 + 1)x − 2y = 0 (10.342a)
(x2 + 1)y − 2x = 0. (10.342b)
Nous isolons x dans la première équation :
x =2y
(y2 + 1), (10.343)
et nous le remettons dans la seconde :(
4y2
(y2 + 1)2+ 1
)
y − 4y
y2 + 1= 0. (10.344)
La première solution qu’on voit est y = 0 qui implique x = 0. Le point (0, 0) estdonc un point critique.
Si y 6= 0 nous pouvons simplifier par y et mettre au même dénominateur(y2 + 1)2 :
4y2 + (y2 + 1)2 − 4(y2 + 1) = 0. (10.345)
En simplifiant nous trouvons une équation bicarrée : y4 +2y2 −3 = 0. Nous posonsu = y2 et nous trouvons l’équation u2 + 2u − 3 = 0. En ce qui concerne u nousavons les solutions u = 1 et u = −3. La solution u = −3 est à rejeter parce queu = y2 (c’est sans doute ici qu’arrivent les solutions complexes trouvées par Sage).Reste donc y = ±1.
Correction de l’exercice 83Cette fois, les calculs ne sont pas compliqués. Le code Sage est :

156 CHAPITRE 10. CORRECTIONS
# -*- coding: utf8 -*-
import outilsINGE
def exercise_10_11():
var(’x,y’)
f(x,y)=x**3-3*x*y**2
print outilsINGE.Extrema(f)
La sortie est :
The function :
(x, y) |--> x^3 - 3*x*y^2
Derivative x and y :
(x, y) |--> 3*x^2 - 3*y^2
(x, y) |--> -6*x*y
Hessian matrix :
[ 6*x -6*y]
[-6*y -6*x]
Critical points :
(0, 0)
At (0,0), the Hessian is
(0, 0)
(0, 0)
Primary principal minors are [0, 0]
Hessian positive semidéfinite
I don’t conclude
Hessian negative semidefinite
I don’t conclude
Il n’est pas capable de conclure, mais les informations sont intéressantes quandmême et répondent à la première question.
D’abord, notons que f(0, 0) = 0.Si nous prenons la droite 6 (t, kt) et calculons f dessus :
f(t, kt) = t3 − 3kt3 = t3(1 − 3k). (10.346)
Cela change de signe quand t change de signe. Dans tout voisinage de (0, 0), il y adonc des points avec f > 0 et des points avec f < 0. Nous concluons que le point(0, 0) est un point de selle.
6. Notez que ce chemin ne donne pas toutes les droites lorsque k varie : il manque la droiteverticale (0, t).

157
Correction de l’exercice 84<++>
Correction de l’exercice 85<++>
Correction de l’exercice 86<++>
Correction de l’exercice 87Pour calculer le déterminant, il faut échelonner la matrice de façon usuelle et
faire quelque mises en évidence en utilisant des produits remarquables :
det
1 a a2
1 b b2
1 c c2
= det
1 a a0 b − a a2 − b2
0 c − a c2 − a2
= (b − a)(c − a) det
1 a a2
0 1 −(a + b)0 1 −(c + b)
= (b − a)(c − a) det
1 a a2
0 1 −(a + b)0 0 −c + a
= (b − a)(c − a)(a − c) det
1 a a2
0 1 −(a + b)0 0 1
(10.347)
Le déterminant de la dernière matrice est 1 parce que le déterminant d’une matricetriangulaire supérieure est égale au produit de ses éléments diagonaux.
Correction de l’exercice 88<++>
Correction de l’exercice 89<++>
Correction de l’exercice 90<++>
Correction de l’exercice 91
a. La matrice C est triangulaire inférieure, donc son déterminant n’est pas leproduit des éléments diagonaux. Il y a une subtilité sur les signes. Si nous

158 CHAPITRE 10. CORRECTIONS
développons le déterminant selon la première ligne, seul le 1 reste, mais ilvient avec un signe :
det
0 0 0 0 0 10 0 0 0 2 10 0 0 3 2 10 0 4 3 2 10 5 4 3 2 16 5 4 3 21
= (−1) det
0 0 0 0 20 0 0 3 20 0 4 3 20 5 4 3 26 5 4 3 2
(10.348)
Nous développons ce déterminant en suivant sa première ligne, et il ne resteque le 2, qui vient avec un signe +. Notez que ce 2, dans la matrice originaleétait sur une case qui aurait eut un signe moins.En continuant de la sorte, le déterminant à calculer est
(−1) · 2 · (−3) · 4 · (−5) · 6 = −720. (10.349)
Correction de l’exercice 92
a. x = 2, y = 1.
b. Le système se met sous forme de matrice et puis se manipule de la façonsuivante.
1 2 3 02 1 3 03 2 1 0
∼
1 2 3 00 −3 −3 00 −4 −8 0
∼
1 2 3 00 1 1 00 2 4 0
∼
1 2 3 00 1 1 00 0 2 0
.
(10.350)En pratique, il n’est pas nécessaire de continuer, parce que maintenant lasolution se lit facilement. En effet, la dernière ligne dit z = 0. La secondeligne dit y + z = 0, (donc y = 0) et la première ligne dit x + 2y + 3z = 0,donc x = 0.
c. Ce système a 3 équations pour 4 inconnues. Nous ne nous attendons doncpas à pouvoir le résoudre complètement. La stratégie va donc être de toutexprimer en termes de la dernière variable. Nous n’allons donc pas essayerde mettre de zéros dans la dernière ligne.
1 1 1 −3 21 −2 2 15 −31 1 −1 −9 0
∼
1 1 1 −3 21 −2 2 15 −30 0 −2 −6 −2
∼
1 1 1 −3 20 −3 1 18 −50 0 −2 −6 −2
(10.351)À partir d’ici, nous pouvons exprimer toutes les variables en fonction de t.La dernière ligne dit que −2z − 6t = −2, ce qui donne
z = 1 − 3t. (10.352)

159
La seconde ligne dit que −3y + z + 18t = −5. En injectant dedans la valeurz = 1 − 3t, nous trouvons
y = 2 + 5t, (10.353)
Et enfin, la première ligne dit que x+ y + z −3t = 2. En injectant les valeursdéjà trouvées de y et z en fonction de t, nous trouvons
x = t − 1. (10.354)
Notons qu’il y a quand même moyen de se simplifier un peu la vie en ajoutantencore plus de zéros dans la matrice (tout en en cassant aucun !). En effet,on peut utiliser la troisième ligne pour mettre des zéros sur la colonne desz des premières et deuxièmes lignes, et puis utiliser la deuxième ligne pourmettre un zéro sur la colonne des y dans la première ligne :
1 1 0 −6 10 −3 0 15 −60 0 1 3 1
∼
1 0 0 −1 −10 −1 0 5 −20 0 1 3 1
. (10.355)
Sur cette dernière matrice, les solutions se lisent encore plus facilement.
d. Cette fois, il y a plus d’équations que d’inconnues. Nous nous attendons doncà ce qu’il n’y ait soit pas de solutions, soit qu’il y ait une ligne « en trop ».Nous pouvons commencer par mettre des zéros sur la colonne du z de lapremière et seconde ligne en utilisant la troisième.
1 4 1 121 1 −1 02 1 0 41 0 1 4
∼
0 4 0 82 1 0 42 1 0 41 9 1 4
. (10.356)
La deuxième et la troisième ligne sont identique. Nous pouvons donc sim-plement barrer une des deux et continuer comme si nous avions que troiséquations. Il est toujours bien de simplifier la première ligne par 4. Cettepremière ligne ne contient qu’un seul coefficient non nul. Elle donne donctout de suite y = 2. À partir de là, le système est simple à résoudre. Nousavons
y = 22x + y = 4x + z = 4.
(10.357)
Sachant que y = 2, la seconde équation donne x = 1, et sachant que x = 1,la troisième donne 1 + z = 4, c’est à dire z = 3.

160 CHAPITRE 10. CORRECTIONS
e. Il y a deux équations pour 4 inconnues, donc on va pouvoir laisser deuxvariables non résolues. Exprimons x et z en termes de y et t (tout autre choixest bon). La somme des deux équations donne tout de suite 3x+3y+3t = −3,et donc
x = −1 − y − t. (10.358)
En remettant cela dans la première équation, nous avons −2 − 2y − 2t + y −3z − t = 1, ce qui donne
z =3 + y + 3t
3. (10.359)
Correction de l’exercice 93Nous résolvons les systèmes en utilisant Sage avec le script suivant.
# -*- coding: utf8 -*-
"""
Ce script Sage résout un certain nombre
de systèmes d’équations linéaires du cours INGE1121
"""
import outilsINGE
def exercise_1_1_bcdefhi():
# Exercice 1.1.b (INGE1121)
A=matrix([ [1,-2,3,-2,0],[3,-7,-2,4,0],[4,3,5,2,0] ])
v=vector((0,0,0,0,0))
print outilsINGE.SolveLinearSystem(A,v)
# Exercice 1.1.c (INGE1121)
A=matrix([ [2,1,-2,3],[3,2,-1,3],[3,3,3,-3] ])
v=vector((0,4,9))
print outilsINGE.SolveLinearSystem(A,v)
# Exercice 1.1.d (INGE1121)
A=matrix([ [1,2,-3],[2,5,2],[3,-1,-4] ])
v=vector((0,0,0))
print outilsINGE.SolveLinearSystem(A,v)
# Exercice 1.1.e (INGE1121)
A=matrix([ [1,2,-1],[2,5,2],[1,4,7],[1,3,3] ])
v=vector((0,0,0,0))
print outilsINGE.SolveLinearSystem(A,v)
# Exercice 1.1.f (INGE1121)
A=matrix([ [1,1,1,1],[1,1,1,-1],[1,1,-1,1],[1,-1,1,1] ])
v=vector((0,4,-4,2))

161
print outilsINGE.SolveLinearSystem(A,v)
# Exercice 1.1.h (INGE1121)
A=matrix([ [1,3,3],[1,3,4],[1,4,3] ])
v=vector((1,0,3))
print outilsINGE.SolveLinearSystem(A,v)
# Exercice 1.1.i (INGE1121)
A=matrix([ [1,-3,2],[-3,3,-1],[2,-1,0] ])
v=vector((-6,17,3))
print outilsINGE.SolveLinearSystem(A,v)
Le résultat est le suivant :
The given matrix corresponds to the system
x1 - 2*x2 + 3*x3 - 2*x4 == 0
3*x1 - 7*x2 - 2*x3 + 4*x4 == 0
4*x1 + 3*x2 + 5*x3 + 2*x4 == 0
And the solutions are
[
[x1 == -23/16*r19, x2 == -5/16*r19, x3 == 15/16*r19, x4 == r19, x5 == r18]
]
The given matrix corresponds to the system
2*x1 + x2 - 2*x3 + 3*x4 == 0
3*x1 + 2*x2 - x3 + 3*x4 == 4
3*x1 + 3*x2 + 3*x3 - 3*x4 == 9
And the solutions are
[
[x1 == 3*r20 - 7, x2 == -4*r20 + 11, x3 == r20, x4 == 1]
]
The given matrix corresponds to the system
x1 + 2*x2 - 3*x3 == 0
2*x1 + 5*x2 + 2*x3 == 0
3*x1 - x2 - 4*x3 == 0
And the solutions are
[
[x1 == 0, x2 == 0, x3 == 0]
]
The given matrix corresponds to the system
x1 + 2*x2 - x3 == 0
2*x1 + 5*x2 + 2*x3 == 0
x1 + 4*x2 + 7*x3 == 0
x1 + 3*x2 + 3*x3 == 0

162 CHAPITRE 10. CORRECTIONS
And the solutions are
[
[x1 == 9*r21, x2 == -4*r21, x3 == r21]
]
The given matrix corresponds to the system
x1 + x2 + x3 + x4 == 0
x1 + x2 + x3 - x4 == 4
x1 + x2 - x3 + x4 == -4
x1 - x2 + x3 + x4 == 2
And the solutions are
[
[x1 == 1, x2 == -1, x3 == 2, x4 == -2]
]
The given matrix corresponds to the system
x1 + 3*x2 + 3*x3 == 1
x1 + 3*x2 + 4*x3 == 0
x1 + 4*x2 + 3*x3 == 3
And the solutions are
[
[x1 == -2, x2 == 2, x3 == -1]
]
The given matrix corresponds to the system
x1 - 3*x2 + 2*x3 == -6
-3*x1 + 3*x2 - x3 == 17
2*x1 - x2 == 3
And the solutions are
[
[x1 == 37, x2 == 71, x3 == 85]
]
Correction de l’exercice 94<++>
Correction de l’exercice 95Nous utilisons Sage pour fournir la réponse. Le code suivant résout le système
et donne l’inverse de la matrice :
# -*- coding: utf8 -*-
import outilsINGE

163
def exercise_1_3():
A=matrix([[2,1,-2],[3,2,2],[5,4,3]])
v=vector((10,1,4))
print outilsINGE.SolveLinearSystem(A,v)
print "Matrice inverse :"
print A.inverse()
La sortie est ici :
The given matrix corresponds to the system
2*x1 + x2 - 2*x3 == 10
3*x1 + 2*x2 + 2*x3 == 1
5*x1 + 4*x2 + 3*x3 == 4
And the solutions are
[
[x1 == 1, x2 == 2, x3 == -3]
]
Matrice inverse :
[ 2/7 11/7 -6/7]
[ -1/7 -16/7 10/7]
[ -2/7 3/7 -1/7]
Correction de l’exercice 96Nous échelonons la matrice de façon usuelle. Tellement usuelle que nous en
confions les calculs à Sage.
# -*- coding: utf8 -*-
def exercise_1_5():
var(’r,s,y1,y2,y3,y4’)
A=matrix([[1,2,3,4,y1],[2,-1,1,-1,y2],[3,1,r,3,y3],[-2,6,4,s,y4]])
A[3]=A[3]+A[1]
A[1]=A[1]-2*A[0]
A[2]=A[2]-3*A[0]
print A
A[2]=A[2]-A[1]
A[3]=A[3]+A[1]
print A
D’un point de vue technique, remarquez que la numérotation des lignes etcolonnes commence à zéro, et non à un ! C’est comme ça dans beaucoup de langagesde programmation.
La sortie est

164 CHAPITRE 10. CORRECTIONS
[ 1 2 3 4 y1]
[ 0 -5 -5 -9 -2*y1 + y2]
[ 0 -5 r - 9 -9 -3*y1 + y3]
[ 0 5 5 s - 1 y2 + y4]
[ 1 2 3 4
[ 0 -5 -5 -9 -2*y1
[ 0 0 r - 4 0 -y1
[ 0 0 0 s - 10 -2*y1 +
À partir d’ici, nous pouvons discuter un petit peu. D’abord, la dernière lignedonne deux cas
a. s = 10. Dans ce cas, il y a deux sous cas
(a) −2y1 + 2y2 + y4 = 0. Ici, on peut simplement barrer la dernière ligne,et continuer. Il y aura une infinité de solutions.En continuant, nous tombons sur la troisième ligne. Il y a une discussionà faire selon que r = 4 ou non.
(b) −2y1 +2y2 +y4 6= 0. Ici, la dernière ligne dit qu’il n’y a pas de solutions.
La troisième ligne donne une discussion similaire selon que r = 4 ou non enfonction de −y1 − y2 + y3. Les cas avec des solutions sont
a. s = 10, r = 4, −2y1 +2y2 +y4 = 0, −y1 −y2 +y3 = 0. Dans ce cas, le systèmedevient (
1 2 3 4 y1
0 −5 −5 −9 −2y1 + y2
)
. (10.360)
La solution de ce système comporte deux paramètres et est
x1 = −25
α − β + y1 +25
y2
x2 = −95
α − β +15
y2
x3 = β
x4 = α.
(10.361)
Notez que les y ne sont pas des paramètres. Ce sont des données du problème.
b. s = 10, r 6= 4, −2y1 + 2y2 + y4 = 0, −y1 − y2 + y3 6= 0. Dans ce cas, seule ladernière ligne doit être barrée dans le système. Il reste un système de troiséquations.
1 2 3 4 y1
0 −5 −5 −9 −2y1 + y2
0 0 r − 4 0 −y1 − y2 + y3
. (10.362)

165
Les solutions sont les mêmes que celles (10.361), mais x3 n’est plus unparamètre :
β = x3 =−y1 − y2 + y3
r − 4. (10.363)
c. s 6= 10, r = 4, −2y1 + 2y2 + y4 = 6=, −y1 − y2 + y3 = 0. Ce cas-ci est similaireau précédent.
d. s 6= 10, r 6= 4, −2y1 + 2y2 + y4 6= 0, −y1 − y2 + y3 6= 0. Ici, c’est un systèmecomplet de 4 équations à 4 inconnues à résoudre.
Correction de l’exercice 97Disons qu’au début, ils ont respectivement x, y et z écus. Lorsque le premier
donne, il en donne y au second et z au troisième. Leurs avoirs sont donc
x − y − z
2y
2z.
(10.364)
À ce moment, le second donne x−y −z au premier et 2z au troisième. Ils ont donc
2(x − y − z)
2y − (x − y − z) − 2z
4z.
(10.365)
En simplifiant :2(x − y − z)
3y − x − z
4z.
(10.366)
Maintenant, le troisième donne 2(x − y − z) au premier et 3y − x − z au second.Ils se retrouvent donc avec
4(x − y − z)
2(3y − x − z)
−x − y + 7z.
(10.367)
Petite vérification : la somme des trois vaut bien x + y + z. Il faut maintenantjuste maintenant résoudre le système donné en égalant ces trois quantités à 8. Lasolution est donnée par x = 13, y = 7 et z = 4.
Correction de l’exercice 98<++>

166 CHAPITRE 10. CORRECTIONS
Correction de l’exercice 99Si A + B − D = 0, alors D = A + B. Petit calcul :
D =
1 23 45 6
+
−3 −21 −54 3
=
−2 04 −19 9
. (10.368)
Correction de l’exercice 100En général, nous avons
(A + B)2 = (A + B)(A + B) = A2 + AB + BA + B2. (10.369)
Il n’est pas vrai de dire AB = BA, parce que ce n’est pas toujours le cas avec desmatrices. Ici, nous voulons que (A + B)2 = A2 + B2, c’est à dire AB + BA = 0.Calculons les produits AB et BA avec les matrices proposées :
AB =
(
1 −12 −1
)(
1 14 −1
)
=
(
−3 2−2 3
)
, (10.370)
tandis que
BA =
(
3 −22 −3
)
. (10.371)
Nous avons donc bien AB + BA = 0 dans ce cas ci.
Correction de l’exercice 101Il s’agit de calculer et de voir que
AA = BB =
1 0 00 1 00 0 1
. (10.372)
Correction de l’exercice 102Nous cherchons la matrice X sous la forme
X =
(
a bc d
)
. (10.373)
Le produit AX vaut(
2 12 1
)(
a bc d
)
=
(
2a + c 2b + d2a + c 2b + d
)
. (10.374)

167
Les équations pour a, b, c et d sont donc{
2a + c = 22b + d = 1.
(10.375)
La matrice X générale est donc de la forme
X =
(
a b2 − 2a 1 − 2b
)
. (10.376)
Correction de l’exercice 103Par définition, A2 = AA. En remplaçant le premier A par AB, nous avons
A2 = ABA. (10.377)
Maintenant, nous remplaçons BA par B, ce qui donne
A2 = AB, (10.378)
et nous savons par hypothèse que AB = A. Le même genre de petit jeu donneB2 = B.
Correction de l’exercice 104Cet exercice se fait par récurrence. Lorsque n = 1, c’est vrai. Supposons que
ce soit vrai pour n, et montrons que c’est vrai pour n + 1. Nous avons(
λ λ0 λ
)n+1
=
(
λ λ0 λ
)(
λ λ0 λ
)n
. (10.379)
En remplaçant la dernière matrice par l’hypothèse de récurrence, et en effectuantle produit, on trouve ce qu’il faut.
Correction de l’exercice 105
a. (A − B)2 = A2 − AB − BA + b2, cela vaut A2 + B2 lorsque AB = −BA.
b. (A+B)(A−B) = A2 −AB +BA−B2, cela vaut A2 −B2 lorsque AB = BA.
Correction de l’exercice 106Si nous posons
X =
a b c de f g hi j k lm n o p
, (10.380)

168 CHAPITRE 10. CORRECTIONS
nous trouvons
AX =
e f g hi j k lm n o p0 0 0 0
,
XA =
0 a b c0 e f g0 i j k0 m n o
.
(10.381)
En égalisant les deux, nous trouvons
j = e = i = m = n = o = 0, (10.382)
ainsi que f = a, b = g, h = c, j = e, k = f , l = g, n = i, o = j, p = k = f .Étant donné que e = i = 0, nous avons directement j = n = 0. Remarquez quecertaines variables arrivent dans plusieurs équations. Après avoir bien posé toutesles égalités, le résultat est
a b c d0 a b c0 0 a b0 0 0 a
. (10.383)
Correction de l’exercice 107Lorsque n = 1, la proposition est évidente. Supposons maintenant que la propo-
sition soit vraie pour un certain entier k, et prouvons qu’alors c’est vrai pour k +1.Nous devons calculer
Ak+1 = AkA =
(
1 k0 1
)(
1 10 1
)
. (10.384)
Pour écrire cela, nous avons utilisé l’hypothèse de récurrence
Ak =
(
1 k0 1
)
. (10.385)
En effectuant le produit matriciel dans (10.384), nous trouvons
Ak+1 =
(
1 k + 10 1
)
, (10.386)
ce qui est bien ce que nous voulions.
Correction de l’exercice 108

169
a. oui.
b. Non, et la différence avec le précédent est que la somme de deux polynômesde degré trois peut n’être que de degré deux : (x3 + x2) − (x3 + x) = x2 − xpar exemple.
c. Oui, c’est un plan. Si (a, b, c) et (a′, b′, c′) vérifient la condition, regardonsque (a + a′, b + b′, c + c′) vérifie la condition :
(a + a′) + 2(b + b′) − (c + c′) = 0. (10.387)
d. Non, par exemple (1, 0, 0) est dans l’ensemble, mais pas (2, 0, 0) qui est ledouble.
e. Non, c’est un plan affin. Par exemple (2, 1)+(5, 4) = (7, 5), mais (7−5) 6= 1,alors que (2, 1) et (5, 4) vérifient la condition.
f. Oui, c’est l’intersection de deux plans. Si (a, b, c) et (a′, b′, c′) vérifient lesdeux conditions, c’est facile de voir que (a + a′, b + b′, c + c′) vérifie les deuxconditions.
g. Non, si (n, m) ∈ N2, il suffit de le multiplier par√
2 et ce n’est plus dans N2.
h. Non, par exemple (a, b) − (a, b) = (0, 0) et évidement, (0, 0) n’est pas dansl’ensemble.
Correction de l’exercice 109On commence par calculer les produits à part :
5(−3√
2,110
, 2) = (−14√
2,22
, 10)
7(√
2, 0, 2) = (7√
2, 0, 14),(10.388)
et puis on fait la somme
(−14√
2,22
, 10) − (2, −1,35
)+ = (7√
2, 0, 14) = (−8√
2 − 2,32
,1175
). (10.389)
Correction de l’exercice 110En général, il faut trouver les coefficients λ1, λ2 et λ3 tels que
λ1
111
+ λ2
352
+ λ3
130
=
abc
. (10.390)
Cela revient à résoudre le système
λ1 + 3λ2 + λ3 = aλ1 + 5λ2 + 3λ3 = bλ1 + 2λ2 = c
(10.391)

170 CHAPITRE 10. CORRECTIONS
Nous résolvons cela en termes de matrices :
1 3 1 a1 5 3 b1 2 0 c
∼
0 1 1 a − c0 2 2 b − a1 2 0 c
(10.392)
Au niveau des coefficients, la seconde ligne est juste le double de la première, doncpour avoir une solution, il faut absolument que le terme indépendant de la secondesoit également la moitié : b − a = 2(a − c). Nous pouvons continuer et tomber surla matrice suivante :
0 0 0 3a − b − 2c0 2 2 b − a1 2 0 c
. (10.393)
Lorsqu’on regarde le vecteur
abc
=
123
, (10.394)
on a que la condition 3a − b − 2c = 3 − 2 − 6 6= 0, donc ce vecteur ne peut pasêtre écrit comme combinaison des trois vecteurs donnés. Avec l’autre, par contre,ça fonctionne mieux :
abc
=
0−21
, (10.395)
donne le système{
λ1 + 2λ2 = 12λ2 + 2λ3 = −2.
(10.396)
Comme ce sont deux équations avec 3 inconnues, il n’y a pas d’espoir de trouverune seule solution. Nous résolvons donc par rapport à λ1 et λ3 en laissant λ2 commeparamètre. Nous trouvons λ1 = 1 − 2λ2 et λ3 = −1 − λ2.
Pour chaque λ2, cela donne un triple (λ1, λ2, λ3) tel que
λ1
111
+ λ2
352
+ λ3
130
=
0−21
. (10.397)
Prenez par exemple, λ2 = 0, on trouve λ1 = 1 et λ3 = −1.
Correction de l’exercice 111Une condition très intéressante pour savoir si trois vecteurs forment une base
et de les mettre dans une matrice et de voir le déterminant. Si il est non nul, c’est

171
une base ; si il est nul, ce n’est pas une base. Ici, on a∣∣∣∣∣∣∣
0 5 a1 −2 b
−1 1 c
∣∣∣∣∣∣∣
= −5(c + b) + a(1 − 2). (10.398)
La condition pour que les trois soient non libres est que le déterminant soit nul,c’est à dire
a + 5(b + c) = 0. (10.399)
Correction de l’exercice 112
a. Oui parce que deux vecteurs dans R3, il devraient être multiples l’un del’autre pour ne pas être libres.
b. Oui, base canonique
c. Oui : tout les vecteurs sont libres avec (0, 0, 0).
d. On utilise la critère du déterminant (voir exercice 111). Ici nous avons∣∣∣∣∣∣∣
2 1 41 4 9
−3 0 −3
∣∣∣∣∣∣∣
= −3(1 · 9 − 4 · 4) = 0. (10.400)
Donc le système n’est pas libre.
e. Plus de 3 vecteur dans R3 ne peuvent pas être libres.
f. Le déterminant ∣∣∣∣∣∣∣
1 0 10 −5 71 0 −2
∣∣∣∣∣∣∣
(10.401)
est non nul, donc la partie est libre.
g. Un seul vecteur, c’est toujours libre.
Correction de l’exercice 113
a. Tous parce que, en particulier, la base canonique est contenue dans la sphère
b. Non parce qu’une droite est donné seulement par deux vecteurs. Tous lespoints de D sont de la forme
a + λ(b − a) (10.402)
si a, b ∈ D. En faisant des combinaisons de tels vecteurs, on ne peut pas faired’autre choses que des combinaisons des vecteurs a et (b − a).

172 CHAPITRE 10. CORRECTIONS
c. Avec un seul point, on ne génère qu’une seule droite
d. On ne génère que le plan (qui est, lui-même, un espace vectoriel).
e. oui
Correction de l’exercice 114<++>
Correction de l’exercice 115
a. C’est la base canonique, donc le vecteur a pour composantes (1, 2).
b. Il faut résoudre
λ1
(
01
)
+ λ2
(
10
)
=
(
12
)
. (10.403)
Facile, la réponse est que les coordonnées (λ1, λ2) = (2, 1).
c. À résoudre, le système{
a + b = 12a + b = 2
. (10.404)
La solution est a = 1 et b = 0, donc les coordonnées sont (1, 0).
d. À résoudre :
λ1
(
11
)
+ λ2
(
21
)
=
(
12
)
, (10.405)
la solution est (λ1, λ2) = (1, )1.
e. Le système est{
−a + 4b = 13a = 2
, (10.406)
donc (2/3, −5/12).
Correction de l’exercice 116Le vecteur qui a pour composante (λ1, λ2, λ3) dans la base e1, e2, e3 est le vecteur
λ1e1 + λ2e2 + λ3e3. Ici il s’agit de
1
111
+ 2
012
+ (−1)
0−10
=
145
. (10.407)
Correction de l’exercice 117
On demande une base dans lequel le second vecteur de base est
(
12
)
. Presque
n’importe quoi est bon comme premier vecteur (juste pas un multiple de celui

173
qu’on a déjà choisit). Par exemple
(
10
)
et
(
12
)
. (10.408)
Correction de l’exercice 118Dans la base
7−52
et
√3
29−8
, (10.409)
les deux vecteurs donnés ont évidement les coordonnées
(
10
)
et
(
01
)
.
Correction de l’exercice 119
a. La base E étant la base canonique, le vecteur
(
ab
)
a pour coordonnées (a, b).
Pour la base F , il faut résoudre le système(
ab
)
= λ1
(
11
)
+ λ2
(
12
)
. (10.410)
La résolution donne donc (2a − b, b − a). Pour trouver les coordonnées de cemême vecteur dans la base G, il faut résoudre
{
λ1 + 2λ2 = a2λ1 + λ2 = b.
(10.411)
Cela se résous facilement par substitution, et le résultat est λ1 = 2b−a3
etλ2 = 2a−b
3.
b. Nous avons d’abord 7e1 − 2e2 =
(
7−2
)
. Ensuite, nous devons résoudre
(
7−2
)
= λ1
(
12
)
+ λ2
(
21
)
. (10.412)
Cela donne (−11/3, 16/3).
Correction de l’exercice 120<++>

174 CHAPITRE 10. CORRECTIONS
Correction de l’exercice 121Il faut essayer de trouver des constantes a, b, c ∈ R telles que la fonction
bex + b sin(x) + c cos(x) (10.413)
soit nulle, c’est à dire telle que cette somme soit zéro pour tout x. Cela n’est paspossible (et donc la partie est libre). En effet, comme ex → ∞, de toutes façons,il faut a = 0. Maintenant, en x = 0, sin(x) = 0 et cos(x) = 1, nous devons doncavoir c = 0. De là, b = 0.
Correction de l’exercice 122<++>
Correction de l’exercice 123
a. Pour voir qu’ils sont orthogonaux : produit scalaire.
x · y =
1/32/3
−2/3
·
2/31/32/3
=
19
+29
− 49
= 0, (10.414)
donc ils sont orthogonaux.
b. Le produit vectoriel de x et y donne un vecteur perpendiculaire à la fois à xet à y :
x × y =
∣∣∣∣∣∣∣
e1 e2 e3
1/3 2/3 −2/32/3 1/3 2/3
∣∣∣∣∣∣∣
= 2e1 − 2e2 − e3. (10.415)
Correction de l’exercice 124Étant donné que l’espace V est donné avec 3 paramètre, il peut être au plus
de dimension 3. Nous trouvons 3 vecteurs de cet espace en posant successivementα = 1, β = 1 et γ = 1 en laissant à chaque fois les deux autres paramètres à zéro.Les trois vecteurs trouvés sont :
v1 = (1, 1, 2, 0)
v2 = (0, 1, 1, 1)
v3 = (0, 0, −2, 2)
(10.416)
Affin de vérifier que ces trois vecteurs sont linéairement indépendants, nous lesmettons dans une matrice et nous vérifions que le rang de la matrice est bien 3 :
A =
1 0 01 1 02 1 −20 1 2
. (10.417)

175
Le rang de cette matrice est bien 3 parce que par exemple le déterminant de lasous matrice
1 0 01 1 02 1 −2
(10.418)
est non nul.Les vecteurs vi trouvé forment donc une base de V . Nous trouvons une base
orthogonale en appliquant la méthode de Gram-Schmidt. Le résultat est
w1 = (1, 1, 2, 0)w2 = (−1/2, 1/2, 0, 1)w1 = (2/3, 2/3, −2/3, 2), (10.419)
dont les normes sont respectivement√
6,√
3/2 et 4/√
3. Une base orthonorméeest donnée par les vecteurs wi divisés par leurs normes.
Correction de l’exercice 125La première chose à faire est de trouver les vecteurs de l’espace V . Pour ce
faire, nous résolvons le système donné par la matrice(
1 1 1 −11 −2 2 0
)
. (10.420)
Le rang de cette matrice étant 2, nous savons que l’espace des solutions sera dedimension donnée par
dim V = dim(R4) − 2 = 2. (10.421)
Il est assez facile de trouver deux vecteurs linéairement indépendants dans V , parexemple en posant x3 = 1 et x4 = 0 et puis x3 = 0 et x4 = 1. Les vecteurs ainsitrouvés sont
v1 = (−43
,13
, 1, 0)
v2 = (23
,13
, 0, 1).(10.422)
Ces deux vecteurs sont linéairement indépendants parce que la matrice qu’ils for-ment est de rang deux.
La méthode de Gram-Schmidt appliqué à ces deux vecteurs fournit
w1 = (−43
,13
, 1, 0)
w2 = (413
,1126
,726
, 1),(10.423)
et leurs normes sont√
26/3 et√
35/26.

176 CHAPITRE 10. CORRECTIONS
Correction de l’exercice 126Ici, la tentation est d’appliquer la méthode de Gram-Schmidt. Cela n’est pas
directement possible parce qu’avant d’appliquer Gram-Schmidt, il nous faut unepartie libre. La matrice formée par les vecteurs donnés est de rang deux :
1 1 −2 −31 2 −3 −40 −2 2 2
. (10.424)
En substituant les lignes L2 → L2 − L1 et L3 → L3/2, nous trouvons que ladeuxième et la troisième ligne deviennent les mêmes, de telle sorte qu’il reste
(
1 1 −2 −30 1 −1 −1
)
, (10.425)
dont le rang est deux.Nous savons donc maintenant que dim(E) = 2. Prenons donc deux vecteurs
linéairement indépendants dans E et appliquons leur Gram-Schmidt. Un choixpossible est
v1 = (1, 1, 0)
v2 = (1, 2, −2)(10.426)
dont le Gram-Schmidt estw1 = (1, 1, 0)
w2 = (−12
,12
, −2)(10.427)
Correction de l’exercice 127Dans les deux cas, il faut utiliser le fait que (AB)−1 = B−1A−1 et (AB)t =
BtAt.
a. Calculons le produit (AB)t(AB) :
(AB)t(AB) = Bt AtA︸ ︷︷ ︸
1
B = BtB = 1 (10.428)
parce que AAt = BBt = 1 du fait que A et B soient orthogonales.
b. La matrice TB−1 est T (AT )−1 = TT −1A−1 = A−1. Mais on sait que si A estorthogonale, alors A−1 est également orthogonale.
Correction de l’exercice 128Afin de vérifier que W est un espace vectoriel, il faut faire trois choses
a. Prouver que (0, 0, 0, 0) ∈ W . La vérification est immédiate : 0 + 2 · 0 + 0 +3 · 0 = 0.

177
b. Si x et y sont dans W , il faut que x+y soient dans W . Testons donc l’équationde définition de W sur le vecteur
x + y = (x1 + y1, x2 + y2, x3 + y3, x4 + y4). (10.429)
Il faut vérifier que la combinaison suivante est nulle :
(x1 + y1) + 2(x2 + y2) + (x3 + y3) + 3(x4 + y4) (10.430)
En regroupant les termes en x et en y, on obtient
x1 + 2x2 + x3 + 3x4︸ ︷︷ ︸
x∈W ⇒=0
+ y1 + 2y2 + y3 + 3y4︸ ︷︷ ︸
y∈W ⇒=0
. (10.431)
c. Si x ∈ W , il faut que λx ∈ W pour tout λ ∈ R. La démonstration estsimilaire à la précédente. Il suffit d’écrire la condition pour le vecteur λx etde mettre λ en évidence pour obtenir zéro.
Les points du plan sont les points (x1, x2, x3, x4) ∈ R4 qui vérifient l’équation
x1 + 2x2 + x3 + 3x4 = 0. (10.432)
La matrice de cette équation est la toute bête matrice(
1 2 1 3)
, (10.433)
dont le rang est un. La dimension de l’espace de solutions d’un système de rangun dans R4 est 3. L’espace W est donc de dimension 3.
Supposons avoir trouvé une base orthogonale w1, w2, w3 de W . Les vecteurs deW ⊥ perpendiculaires à w1, w2 et w3. Ils sont donc linéairement indépendants deceux de W (par la proposition 3). Si w′
1, · · · , w′l sont une base orthonormale de
W ⊥, nous avons alors 3 + l vecteurs linéairement indépendants dans R4. Nous endéduisons que l = 1. Donc dim(W ⊥) = 1.
Trouvons une base de W . Par définition les vecteurs de W s’écrivent sous laforme
(−2x2 − x3 − 3x4, x2, x3, x4) (10.434)
où x2, x3 et x4 sont des paramètres. Pour trouver trois vecteurs de base de cetespace, posons successivement x2 = 1, x3 = 1 et x3 = 1. Les vecteurs trouvés sont
v1 = (−2, 1, 0, 0)
v2 = (−1, 0, 1, 0)
v3 = (−3, 0, 0, 1).
(10.435)

178 CHAPITRE 10. CORRECTIONS
Pour vérification que ces trois vecteurs sont bien linéairement indépendants, nouspouvons les mettre dans une matrice
−2 −1 −31 0 00 1 00 0 1
(10.436)
et puis vérifier que le rang de cette matrice est bien 3.Nous savons que W ⊥ est de dimension 1. En trouver une base revient à trouver
un vecteur perpendiculaire aux trois vecteurs v1 donnés en (10.435). Nous pouvonsbien entendu chercher ce vecteur sous la forme x = (x1, x2, x3, x4) et résoudre lesystème d’équation donné par
〈x, v1〉 = 0 (10.437a)
〈x, v2〉 = 0 (10.437b)
〈x, v3〉 = 0 (10.437c)
Heureusement, il y a un «truc» pour trouver. Il suffit de prendre l’équation de Wet de prendre comme vecteur x le vecteur dont les coordonnées sont les coefficientsdans l’équation de W . Ici, l’équation de W est
x1 + 2x2 + x3 + 3x4 = 0. (10.438)
Je prétends donc que le vecteur (1, 2, 1, 3) est perpendiculaire aux trois. La vérifi-cation est aisée.
Correction de l’exercice 129
a. Nous avons
A =
(
1 20 3
)
, (10.439)
et donc
A − λ1 =
(
1 − λ 20 4 − λ
)
, (10.440)
dont le déterminant est (1 − λ)(3 − λ). Les seules valeurs propres possiblessont donc
λ1 = 1
λ2 = 3.(10.441)
Il faut maintenant regarder, pour chacune de ces valeurs si il y a vraimentdes vecteurs qui correspondent. Pour λ1 = 1, nous devons résoudre
(
0 20 2
)(
xy
)
=
(
00
)
. (10.442)

179
La réponse est que tous les vecteurs de la forme
(
x0
)
sont des vecteurs propres
de la matrice A pour la valeur propre 1. Pour λ2, nous faisons le calcul
(A − 31)
(
xy
)
=
(
−2 20 0
)(
xy
)
=
(
00
)
, (10.443)
dont les solutions sont données par x = y, c’est à dire par tous les vecteurs
multiples de
(
11
)
. Vérifions, juste pour le fun que la matrice A multiplie bien
le vecteur
(
22
)
par 3. En effet,
(
1 20 3
)(
22
)
=
(
2 + 40 + 6
)
=
(
66
)
. (10.444)
Bien joué !
b. Passons à la matrice
B =
0 1 01 0 00 0 1
. (10.445)
Le déterminant de B − λ1 est donné par∣∣∣∣∣∣∣
−λ 1 01 −λ 00 0 1 − λ
∣∣∣∣∣∣∣
= (1 − λ)(λ2 − 1). (10.446)
Donc les valeurs propres sont données par λ = ±1.Commençons par λ = 1. Nous devons résoudre
−1 1 01 −1 00 0 0
xyz
=
000
. (10.447)
Donc −x + y = 0 et x − y = 0. La seule contrainte est x = y. Il y a deuxvecteurs linéairement indépendants qui vérifient cette contrainte :
111
,et
110
. (10.448)
Pour λ = −1, on doit résoudre
1 1 01 1 00 0 2
xyz
=
000
. (10.449)

180 CHAPITRE 10. CORRECTIONS
La résolution donne x + y = 0 et z = 0. L’espace des vecteurs qui vérifient
cette condition est engendré par le vecteur
1−10
.
Les matrices A et B sont diagonalisables parce qu’elles possèdent une basede vecteurs propres.
c. Passons à la matrice
E =
1 3 50 1 02 0 10
. (10.450)
Nous avons
det(E − λ1) = (1 − λ)2(10 − λ) − 10(1 − λ) = −λ(λ − 1)(λ − 11). (10.451)
Il faudra donc passer en revue les trois valeurs possibles λ = 0, λ = 1 etλ = 11. Pour λ = 0, nous avons à résoudre
1 3 50 1 02 0 10
xyz
=
000
, (10.452)
ce qui donne x + 5z = 0 et y = 0, donc on a l’espace engendré par le vecteur
10
−1/5
. Pour la valeur propre λ = 1, on trouve le vecteur
−9/2−5/3
1
, et enfin
pour λ = 11, il faut résoudre le système
x + 3y + 5z = 11x
y = 11y
2x + 10z = 11z
, (10.453)
ce qui donne immédiatement y = 0 et puis 2x − z = 0. L’espace propre
correspondant est engendré par le vecteur
1/201
. Vérification :
1 3 50 1 02 0 10
1/201
=
11/2011
. (10.454)
Correction de l’exercice 130Si v est une vecteur propre de valeur propre λ, c’est que l’équation suivante est
vérifiée :Av = λv. (10.455)

181
a. Calculons (αA)v = α(Av) = αλv, donc v est vecteur propre de αA pour lavaleur αλ.
b. Nous avonsA2v = AAv = Aλv = λAv = λλv = λ2v. (10.456)
Le vecteur v est donc vecteur propre de A2, de valeur propre λ.
c. Essayons de voir si nous avons une égalité A−1v = µv pour un certain µ. Enappliquant A des deux côtés, nous avons v = µAv = µλv, donc nous avonsµ = 1
λ.
Noter que λ = 0 n’est pas possible parce qu’on a supposé que A est inversible.
Correction de l’exercice 131Nous devons calculer A(Ry), en sachant que R−1ARy = λy. En appliquant R
des deux côtés, nous avonsA(Ry) = λ(Ry), (10.457)
ce qui prouve que le vecteur Ry est vecteur propre de A pour la valeur propre λ.
Correction de l’exercice 132En posant a = 1, le déterminant de la matrice est
∣∣∣∣∣∣∣
1 0 c2 1 3(b − 1)
−3b c 1
∣∣∣∣∣∣∣
= 2c2 + 3c + 1, (10.458)
qui s’annule lorsque c = −1/2 ou bien lorsque c = −1.Lorsque c = −1, les valeurs propres sont données par l’équation
∣∣∣∣∣∣∣
1 − λ 0 −12 1 − λ 3(b − 1)
−3b −1 1 − λ
∣∣∣∣∣∣∣
= −(λ − 3)λ2 = 0. (10.459)
Les valeurs propres sont λ1 = 0 et λ − 2 = 3. Noter que valeur λ1 est une racinedouble. Afin de trouver les vecteurs propres pour la valeur λ1 =, nous résolvonsmaintenant l’équation Mv = 0 :
1 0 −1 02 1 3(b − 1)
−3b −1 1
∼
1 0 −1 02 − 3b 0 3(b − 1) + 11 − 3b −1 0 0
. (10.460)
Nous voyons que la deuxième ligne est (2 − 3b) fois la première, donc elle saute. Ilreste z = x et y = (1 − 3b)x, et donc l’espace engendré par le vecteur
11
1 − 3b
. (10.461)

182 CHAPITRE 10. CORRECTIONS
Nous passons maintenant à λ2 = 3, c’est à dire à résoudre l’équation Mv = 3v.Sous forme matricielle nous avons
−2 0 −1 02 −2 3(b − 1) 0
−3b −1 −2 0
, (10.462)
dont la solution fournit le vecteur
−1/2(3b − 4)/2
1
. (10.463)
Le fait qu’il n’y ait que deux vecteurs propres linéairement indépendants fait qu’iln’y a pas de bases de vecteurs propres, et donc la matrice n’est pas diagonalisable.
Correction de l’exercice 133Nous avons
det
(
1 − λ 00 i − λ
)
= (1 − λ)(i − λ), (10.464)
et donc les deux valeurs propres sont 1 et i. Pour λ = 1, on résou(
0 00 i − 1
)(
xy
)
=
(
00
)
, (10.465)
donc x est libre et (i − 1)y = 0, c’est à dire que nous avons le vecteur(
10
)
. (10.466)
Pour la valeur propre λ = i, par contre, nous résolvons(
1 − i 00 0
)(
xy
)
, (10.467)
donc y est libre et (1 − u)x = 0, c’est à dire x = 0. Le vecteur propre associé estdonc (
01
)
. (10.468)
Il y a deux vecteurs linéairement indépendants, donc c’est une base et la matriceest diagonalisable.
Faisons maintenant la matrice
B =
(
1 10 i
)
. (10.469)

183
Ses valeurs propres sont encore λ1 = 1 et λ2 = i. Pour λ1 = 1, il faut résoudreAv = v, c’est à dire
(
1 10 i
)(
xy
)
=
(
xy
)
, (10.470)
et la solution est x + y = x et iy = y. Cela donne y = 0 et x libre, c’est à dire
qu’une base de cet espace propre est
(
10
)
. Pour λ2 = i, on doit résoudre Av = iv,
c’est à dire x + y = ix et iy = it. Pas de contraintes sur y, mais x = y/(1 − i).Nous avons donc le vecteur propre
(
1/(1 − i)1
)
=
(
i + 12
)
. (10.471)
Correction de l’exercice 134Comme ce sont des matrices symétriques, il existe une base dans laquelle elles
sont diagonales. Et de plus, cette base est elle-même orthonormale, de telle façonà ce que le changement de base soit donné par une matrice orthogonale.
Voyons les vecteurs propres de la matrice
A =
3 −1 1−1 5 −11 −1 3
, (10.472)
Nous avons det(1 − λ1) = −(λ − 6)(λ − 3)(λ − 2). Nous devons résoudre succes-sivement les systèmes Av = 6v, Av = 3v et Av = 2v. Les vecteurs trouvés sontrespectivement
1−21
,
111
,
10
−1
. (10.473)
En calculant les produits scalaires, il est vite vu que ces trois vecteurs sont deuxà deux orthogonaux. La matrice qui fait passer de la base canonique à la base deces trois vecteurs s’obtient en mettant simplement ces trois vecteurs en colonnes :
1 1 1−2 1 01 1 −1
. (10.474)
Hélas, cette matrice n’est pas orthogonale parce que les trois vecteurs obtenus nesont pas de norme 1. Il faut donc un peu les modifier. La norme du premier est√
12 + 4 = 1 =√
6, donc en divisant le vecteur par√
6, nous avons un vecteur de

184 CHAPITRE 10. CORRECTIONS
norme 1. La norme du second est√
3 et celle du troisième est√
2, donc la matriceorthogonale recherchée est
1/√
6 1/√
3 1√
2−2/
√6 1/
√3 0
1/√
6 1/√
3 −1/√
2
. (10.475)
Correction de l’exercice 135
a. La symétrie par rapport au plan x = −z doit laisser invariante les vecteursqui sont dans le plan, c’est à dire les vecteurs tels que x = −z :
010
, et
10
−1
. (10.476)
En même temps, la symétrie doit changer le signe du vecteur
101
qui est
perpendiculaire au plan donné. Afin d’écrire la matrice de l’application, ilfaut trouver l’image des vecteurs de bases e1, e2 et e3. Pour cela, il fautdécomposer ces vecteurs de la base canonique dans la base donnée par
010
,
10
−1
, et
101
. (10.477)
Nous trouvons
100
=
12
10
−1
+
12
101
, (10.478)
donc, en nous rappelant quel vecteur reste inchangé par A et quel doitchanger de signe,
Ae1 = A
100
=
12
A
10
−1
+
12
A
101
=
12
10
−1
− 1
2
101
=
00
−1
.
(10.479)Vu que nous avons dit que e2 ne changeait pas, nous avons tout de suite
Ae2 =
010
. (10.480)

185
Et enfin,
Ae3 = A
001
= −1
2A
10
−1
+
12
A
101
= −1
2
10
−1
+
12
−10
−1
=
−100
.
(10.481)Nous pouvons maintenant écrire la matrice de la symétrie en écrivant sim-plement les vecteurs Ae1, Ae2 et Ae3 en colonne :
A =
0 0 −10 1 0
−1 0 0
. (10.482)
b. La symétrie par rapport au plan x = −y laisse inchangés les vecteurs
f1 =
001
, etf2 =
1−10
, (10.483)
tandis qu’elle change le signe de
f3 =
110
. (10.484)
Pour écrire la matrice, il faut d’abord calculer Ae1, Ae2 et Ae3. Pour ce faire,nous décomposons e1, e2 et e3 dans la base {f1, f2, f3} :
e1 =12
(f3 + f3)
e2 =12
(f3 − f2)
e3 = f1,
(10.485)
donc
Ae1 =12
(f2 − f3) =
0−10
Ae2 =12
(−f3 − f2) =
−1
0
Ae3 = f1 =
001
.
(10.486)

186 CHAPITRE 10. CORRECTIONS
La matrice de la symétrie se note alors
0 −1 0−1 0 00 0 1
. (10.487)
c. La matrice produit est
AB =
0 0 −1−1 0 00 1 0
. (10.488)
Tout vecteur perpendiculaire à un des deux plans doit être retourné par cettematrice, et tout vecteur dans les deux plans en même temps doit être laisséinchangé. Il s’agit donc de la symétrie par rapport à la droite intersectiondes deux plans. Calculer les vecteurs propres et valeurs propres pour s’enconvaincre.
Correction de l’exercice 136<++>
Correction de l’exercice 137
a. I s’agit de la symétrie autour de l’axe vert de la figure 10.9. Le vecteur qui estsur cet axe ne bouge pas, tandis que celui qui est perpendiculaire change designe. Ces deux vecteurs sont donc des vecteurs propres, de valeurs propres1 et −1 respectivement.
b. Dans une rotation, aucune direction n’est conservée, sauf cas exceptionnelscomme α = 2π (où rien ne bouge) ou bien α = π qui renverse tout.
c. Tous les vecteurs sont renversés. En particulier Ae1 = −e1 et Ae2 = −e2.Donc la matrice est diagonale dans la base canonique, avec −1 comme valeurpropre double.
Correction de l’exercice 138
a. Les deux vecteurs directeurs du plan sont conservés, et le vecteur perpen-diculaire est retourné. Les conservés sont ceux qui sont vecteurs propres devaleur propre 1, et ce sont
011
et
101
. (10.489)

187
Figure 10.9 – Sous la symétrie par rapport à l’axe, le vecteur sur l’axe ne bougepas, et celui perpendiculaire change de signe.
Pour trouver un vecteur perpendiculaire au plan, il faut un vecteur perpen-diculaire aux deux vecteurs directeurs du plan. Pour ce faire, on calcule leproduit vectoriel. C’est
11
−1
. (10.490)
Ce dernier est un vecteur propre de valeur propre −1.
b. Les vecteurs sur la droite sont conservés. À multiple près, il y en a un seulet c’est
1−3−2
. (10.491)
Celui-là est de valeur propre 1. Tous ceux qui lui sont perpendiculaires (leplan perpendiculaire à cette droite) sont de valeur propre −1.
Correction de l’exercice 139Je n’ai pas corrigé cet exercice. Mais si tu as une correction à proposer, n’hésite
surtout pas à me l’envoyer.
Correction de l’exercice 140Pour les valeurs propres, nous calculons le polynôme caractéristique :
PA(λ) = det
2 − λ 0 α0 −1 − λ 00 0 2 − λ
= −(2 − λ)2(1 + λ). (10.492)

188 CHAPITRE 10. CORRECTIONS
Cela fournit les valeurs propres λ1 = 2 (de multiplicité 2) et λ2 = −1.Commençons par trouver les vecteur propres correspondants à la valeur propre
λ2 = −1 =. Pourquoi nous commençons par celle-là ? Parce qu’il n’y a pas dediscussion sur α pour lui. La matrice du système est
3 0 α0 0 00 0 3
. (10.493)
La troisième ligne dit tout de suite que z = 0m et donc la première ligne donnex = 0 (sans discussions). Ensuite, y est sans contraintes. L’espace propre de lavaleur propre −1 est donc toujours engendré par
v−1 =
010
. (10.494)
En ce qui concerne l’espace propre pour la valeur λ1 = 2, nous avons le systèmede matrice
0 0 α0 −3 00 0 0
. (10.495)
La seconde ligne dit que y = 0. La première dit que αz = 0. Il y a donc deuxpossibilités :
a. α 6= 0. Alors z = 0 est obligatoire et l’espace propre est engendré par
v2 =
100
. (10.496)
Dans ce cas, même si la valeur propre était de multiplicité deux, il n’y a queune seule dimension de vecteurs propres.
b. Si α = 0, alors on ne va pas discuter longtemps : la matrice est déjà diagonaledepuis le début. On lit tout de suite dessus que les vecteur propres sont lestrois vecteurs de la base canonique.
Correction de l’exercice 141D’abord le fait que le rang soit plus petit que l’ordre implique que le détermi-
nant est nul, et que nous avons une valeur propre nulle. La multiplicité de cettevaleur propre ne peut être que 1. Si elle était de multiplicité deux, le rang n’auraitété que de un.

189
En ce qui concerne les autres valeurs propres, on ne peut rien dire. En effetn’importe quelle matrice de la forme
0 0 00 a 00 0 b
(10.497)
avec a et b non nuls est dans les hypothèses de l’exercice.
Correction de l’exercice 142
a. La matrice A est symétrique. Il existe donc une matrice orthogonale qui ladiagonalise.
b.
c.
d. Le polynôme caractéristique est donné par
det
(
1 − λ 21 2 − λ
)
= (1 − λ)(2 − λ) − 2. (10.498)
Les solutions sont λ1 = 0 et λ2 = 3.Pour trouver le vecteur propre correspondant à la valeur zéro, on résous lesystème homogène de la matrice
(
1 21 2
)
. (10.499)
La réponse est donnée par le vecteur v1 =
(
−21
)
et tous ses multiples.
Pour trouver les vecteurs de la valeur 3, nous résolvons le système de(
−2 21 −1
)
, (10.500)
et la réponse est v2 =
(
11
)
.
Les deux vecteurs v1 et v2 n’étant pas orthogonaux, il n’est pas possible detrouver une matrice orthogonale qui diagonalise la matrice de départ.
Correction de l’exercice 143<++>
Correction de l’exercice 144

190 CHAPITRE 10. CORRECTIONS
a. Il s’agit d’abord de remplir la matrice A correspondante à la forme quadra-tique. Le terme en x1x3 correspond aux cases (1, 3) et (3, 1) de la matrice.Comme le coefficient est 2, nous mettons 1 dans chaque case. De la mêmemanière, le terme 2x3x4 fait venir un 1 dans les cases (3, 4) et (4, 3). Lamatrice est donc
A =
0 0 1 00 0 0 01 0 0 10 0 1 0
. (10.501)
Cette façon de construire la matrice fournit toujours une matrice symétrique.Cette dernière aura donc une base de vecteurs propres. Si nous avions mitsimplement 2 dans les cases (1, 3) et (2, 4), nous n’aurions pas eut la symétrie.Cela est l’intérêt de mettre la moitié dans chacune des deux cases.Nous pouvons maintenant nous lancer dans la recherche des valeurs propresde cette matrice :
det(A − λ1) = det
−λ 0 1 00 −λ 0 01 0 −λ 10 0 1 −λ
= −λ det
−λ 1 01 −λ 10 1 −λ
= −λ2 det
(
−λ 11 −λ
)
− λ det
(
1 01 −λ
)
= −λ2(λ2 − 2).
(10.502)
Les valeurs propres sont donc 0 (de multiplicité deux) et ±√
2. Nous savonsdonc qu’il existe des nouvelles variables yi telles que la forme quadratiques’écrive √
2(y21 − y2
2). (10.503)
Afin d’exprimer ces nouvelles coordonnées en fonction des xi, nous devonstrouver les vecteurs propres de la matrice.Pour la valeur propre
√2, nous devons résoudre le système donné par la
matrice
−√
2 0 1 00 −
√2 0 0
1 0 −√
2 10 0 1 −
√2
(10.504)

191
La deuxième ligne dit tout de suite que x2 = 0. En prenant x4 = µ commeparamètre, nous trouvons ensuite
x3 =√
2µ, (10.505)
et −√
2x1 + x3 = 0, ce qui donne√
2(µ − x1) = 0 et donc
x1 = µ. (10.506)
Une base de l’espace propre pour la valeur propre√
2 est alors donné par
10√2
1
. (10.507)
De la même manière, nous trouvons les espaces propres pour les valeurs −√
2et 0. Les réponses sont
√2 ;
10√2
1
, −√
2 ;
10
−√
21
0 ;
100
−1
,
0100
.
(10.508)
Notez que tous ces vecteurs sont deux à deux orthogonaux (était-ce prévisi-ble ?).Une erreur à ne pas faire est de croire que la matrice orthogonale qui diago-nalise A est la matrice obtenue en mettant ces quatre vecteurs en colonnes.En effet, ces vecteurs ne sont pas normés. Pour obtenir la bonne matrice, ilfaut les d’abord diviser chacun de ces vecteurs par leur norme. Ce que nousobtenons est
B =
1/2 1/2 1/√
2 00 0 0 1
−√
2/2√
2/2 0 01/2 1/2 −1/
√2 0
. (10.509)
La forme quadratique a la forme (10.503) dans les variables Y données parX = BY , c’est à dire
x1
x2
x3
x4
=
1/2 1/2 1/√
2 00 0 0 1
−√
2/2√
2/2 0 01/2 1/2 −1/
√2 0
y1
y2
y3
y4
. (10.510)

192 CHAPITRE 10. CORRECTIONS
Tu paries que si on substitue les valeurs
x1 =12
(y1 + y2) +y3√
2x2 = y4
x3 =1√2
(y2 − y1)
x4 =12
(y1 + y2) − y3√2
(10.511)
dans l’expression 2x1x3 + 2x3x4, on obtient bien√
2(y22 − y2
1) ?En ce qui concerne le genre de la forme quadratique, il est indéterminé parcequ’il y a une valeur propre strictement négative et une strictement positive.
b. La matrice associée est
A =
2 2 42 −1 24 2 2
. (10.512)
On trouve les valeurs propres en résolvant le polynôme caractéristique, lerésultat est que les valeurs propres sont −2 (de multiplicité 2) et 7.Affin de trouver les vecteurs propres correspondants à la valeur propre −2,nous devons résoudre le système correspondant à la matrice
A + 21 =
4 2 42 1 24 2 4
. (10.513)
Nous pouvons barrer directement les deux dernières lignes et nous nousretrouvons avec l’équation
2x1 + x2 + 2x3 = 0, (10.514)
dont deux solutions sont par exemple
v1 = (−1, 2, 0)
v2 = (−1, 0, 1)(10.515)
Notez que beaucoup d’autres solutions sont possibles : toutes les combi-naisons linéaires de ces deux sont bonnes. (pourquoi ?)Les vecteurs propres correspondants à la valeur propre 7 se trouvent enrésolvant le système de la matrice
A − 71 =
−5 2 42 −8 24 2 −5
, (10.516)

193
dont les solutions sont les multiples de
v3 = (2, 1, 2). (10.517)
L’étape suivante est d’avoir une base orthonormée pour les vecteurs propres.Cela se fait en utilisant le procédé de Gram-Schmidt. Le résultat est
w1 = (−1, −4/5, 2)
w2 = (2, −2/5, 1)
w3 = (0, 1, 2).
(10.518)
Les normes de ces vecteurs sont
‖w1‖ =√
134/5
‖w2‖ =√
129/5
‖w5‖ =√
5.
(10.519)
c. La matrice est
A =
0 1/2 1/21/2 0 1/21/2 1/2 0
. (10.520)
Ses valeurs et vecteurs propres sont
1 → v1 = (1, 1, 0)
−1/2 → v2 = (1, 0, 1)
−1/2 → v3 = (1, −1, −1).
(10.521)
La matrice suivante est formée des vecteurs d’une base orthonormale devecteurs propres :
B =
12
√2 1
2
√2 0
13
√32
−13
√32
23
√32
13
√3 −1
3
√3 −1
3
√3
(10.522)
Étant donné les valeurs propres, la matrice n’a aucun genre particulier.
Correction de l’exercice 145Nous pourrions évidement calculer les valeurs propres de la matrice et en re-
garder les signes. Hélas, la matrice étant de taille 3, le polynôme caractéristiquesera de degré trois, et il n’est pas certain que nous serons capables de le résoudre.

194 CHAPITRE 10. CORRECTIONS
Heureusement, en ce qui concerne la recherche du genre d’une applicationquadratique, les mineurs principaux font autant l’affaire que les valeurs propres.Ici les mineurs principaux sont
m1 = det
3 −1 −1−1 3 1−1 1 3
, m2 = det
(
3 −1−1 3
)
, m3 = det(3). (10.523)
Les calculs vite faits bien faits donnent m1 = 20, m2 = 10 et m3 = 3, de telle sortequ’ils sont tous strictement positifs. Le genre est donc défini positif.
Correction de l’exercice 146Pour trouver le rang, faisons un tout petit peu d’échelonnement :
L3 → L2 + L1
L4 → 5L4 + L2
(10.524)
donne
2 0 −2 00 5 0 −10 0 0 00 0 0 24
. (10.525)
Après avoir barré la troisième ligne, nous trouvons facilement une sous matrice detaille 3 × 3 qui a un déterminant non nul. Par conséquent, la rang de la matrice Aest 3.
Le polynôme caractéristique est de degré 4, mais nous savons que 0 est unevaleur propre, donc nous n’aurons en réalité que du degré 3 à résoudre. Maiscomme nous savons un vecteur propre (donné dans l’énoncé), nous allons savoirune seconde valeur propre et le degré du polynôme caractéristique sera seulementdeux.
Pour savoir la valeur propre du vecteur donné, il suffit de lui appliquer lamatrice, on trouve
2 0 −2 00 5 0 −1
−2 0 2 00 −1 0 5
.
11
−11
=
44
−44
, (10.526)
et donc 4 est une valeur propre de vecteur propre (1, 1, −1, 1).Après quelque laborieux calculs, le polynôme caractéristique se factorise en
PA(λ) = (λ − 4)(λ − 6)λ(λ − 4), (10.527)

195
donc les valeurs propres sont {4, 6, 0} et 4 est double.Pour les vecteurs propres, nous résolvons les systèmes d’équations correspon-
dants et les réponses sont6 → (0, 1, 0, −1)
0 → (1, 0, 1, 0)
4 → (1, 0, −1, 0)
4 → (0, 1, 0, 1)
(10.528)
Notez que l’espace propre pour la valeur 4 étant de dimension 2, il y a de nom-breuses autres possibilités : toute les combinaisons linéaires des deux vecteurs pro-posés ici 7 sont corrects. Pour les autres valeurs, seuls les multiples sont corrects.
La méthode de Gram-Schmidt (ne pas oublier de normaliser après) appliquéeaux vecteurs (10.528) fournit la base orthonormée
(0,√
22, 0, −√
2/2)
(√
2/2, 0,√
2/2, 0)
(√
2/2, 0, −√
2/2, 0)
(0,√
2/2, 0,√
2/2)
(10.529)
La matrice B qui diagonalise A est la matrice obtenue en mettant ces quatrevecteurs en colonne, et nous avons
B =
0√
2/2√
2/2 0√2/2 0 0
√2/2
0√
2/2 −√
2/2 0−
√2/2 0 0
√2/2
(10.530)
et puis
BT AB =
6 0 0 00 0 0 00 0 4 00 0 0 4
. (10.531)
Les coordonnées qui font que la forme quadratiques est belle sont données parX = BY , et donc par
x1 =√
2y2/2 +√
2y3/2
x2 =√
2y1/2 +√
2y4/2
x3 =√
2y2/2 −√
2y3/2
x4 = −√
2y11/2 +√
2y4/2
(10.532)
7. Ce sont ceux que me donne mon ordinateur. J’insiste : soyez capable de résoudre les exer-cices à l’ordinateur ; vous n’allez pas trainer toute votre vie à faire des calculs à la main.

196 CHAPITRE 10. CORRECTIONS
Dans ces coordonnées, la forme quadratique devient simplement une somme descarrés des yi avec les valeurs propres comme coefficients :
p(X) = 6y21 + 4y2
3 + 4y24. (10.533)
Notez que cela ne dépend pas de y2 ; cela correspond au fait qu’une des valeurspropres est nulle.
Le genre de la forme quadratique est semi-définie positive parce que toutes sesvaleurs propres sont positives ou nulles.
Correction de l’exercice 147La matrice correspondante est
A =
0 1 −1/2 1/21 0 −1/2 1/2
−1/2 −1/2 0 −11/2 1/2 −1 0
. (10.534)
Afin de trouver le rang de cette matrice, nous échelonnons un petit peu. Il ya plusieurs façons de procéder. On peut par exemple faire L2 → L2 − 2L4 etL3 → L3 + L4 :
A =
0 1 −1/2 1/20 −1 3/2 1/20 0 −1 −1
1/2 1/2 −1 0
, (10.535)
et ensuite L2 → L2 + L1 :
A =
0 1 −1/2 1/20 0 1 10 0 −1 −1
1/2 1/2 −1 0
. (10.536)
À partir de là, nous voyons que la deuxième et la troisième ligne sont égales ausigne près, donc le déterminant de la matrice est nul et le rang ne peut pas être 4.Pour prouver que le rang est 3, il suffit de prendre à peu près n’importe quelle sousmatrice de taille 3 et de calculer le déterminant. Par exemple la matrice obtenueen enlevant la troisième ligne et la troisième colonne :
det
0 1 1/20 0 1
1/2 1/2 0
= 1/2 6= 0. (10.537)
Le rang de la matrice est donc 3.

197
Le fait que le déterminant soit nul montre qu’il y aura une valeur propre nulle.Mais le fait que le rang soit 3 dit également que la valeur propre nulle sera seulementde multiplicité un. Il y aura donc 3 valeurs propres non nulles.
Pour les valeurs propres, il faut calculer et résoudre le polynôme caractéristique
PA(λ) = det
−λ 1 −1/2 1/21 −λ −1/2 1/2
−1/2 −1/2 −λ −11/2 1/2 −1 −λ
. (10.538)
Les solutions avec les multiplicités sont {−1, −1, 0, 2}, et les vecteurs propres cor-respondants sont
2 → (1, 1, −1, 1)
0 → (1, 1, 1, −1)
−1 → (1, −1, 0, 0)
−1 → (0, 0, 1, 1)
(10.539)
La forme quadratique n’a pas de genre particulier. Notre ami Gram-Schmidt, suivitd’une renormalisation,nous fournit la base orthonormale suivante :
(1/2, 1/2, −1/2, 1/2)
(1/2, 1/2, 1/2, −1/2)
(
√2
2, −
√2
2, 0, 0)
(0, 0,
√2
2,
√2
2)
(10.540)
En mettant ces vecteurs en colonne, on obtient la matrice de changement devariables
x1 =
√2
2y3 +
12
y1 +12
y2
x2 = −√
22
y3 +12
y1 +12
y2
x3 =1√2
y4 − 12
y1 +12
y2
x4 =
√2
2y4 +
12
y1 − 12
y2
(10.541)
En mettant ces valeurs dans p(X), nous trouvons bien
p(
X(Y ))
= 2y21 − y2
3 − y24, (10.542)
qui est bien la forme dont les valeurs propres de A sont les coefficients.Cette forme n’est pas d’un genre particulier 8.
8. À part d’être le genre qui peut arriver à l’examen.

198 CHAPITRE 10. CORRECTIONS
Correction de l’exercice 148Calculons Av afin de savoir la valeur propre associée au vecteur donné :
2 1 −1 11 0 1 1
−1 1 2 11 1 1 0
−1010
=
−3030
. (10.543)
La valeur propre est donc 3. Nous savons donc que (λ − 3) pourra être factorisédans le polynôme caractéristique.
Pour le reste de l’exercice c’est standard et c’est résolu de la façon suivante :
# -*- coding: utf8 -*-
import outilsINGE
def exercise_6_5():
A=matrix(QQ,4,4,[2,1,-1,1,1,0,1,1,-1,1,2,1,1,1,1,0])
x=outilsINGE.QuadraticForm(A)
print x
qui retourne
Hi guy; I’m the quadratic form associated with the matix
[ 2 1 -1 1]
[ 1 0 1 1]
[-1 1 2 1]
[ 1 1 1 0]
My eigenvalues and eigenvectors are :
3 -> (1, 0, -1, 0)
3 -> (0, 1, 2, 1)
-1 -> (1, 0, 1, -2)
-1 -> (0, 1, 0, -1)
I’ve the following orthonormal basis of eigenvectors :
(1/2*sqrt(2), 0, -1/2*sqrt(2), 0)
(1/2, 1/2, 1/2, 1/2)
(1/6*sqrt(6), 0, 1/6*sqrt(6), -1/3*sqrt(6))
(-1/2*sqrt(1/3), 3/2*sqrt(1/3), -1/2*sqrt(1/3), -1/2*sqrt(1/3))
A matrix B such that B^tAB is diagonal is
[ 1/2*sqrt(2) 1/2 1/6*sqrt(6) -1/2*sqrt(1/3)]
[ 0 1/2 0 3/2*sqrt(1/3)]
[ -1/2*sqrt(2) 1/2 1/6*sqrt(6) -1/2*sqrt(1/3)]

199
[ 0 1/2 -1/3*sqrt(6) -1/2*sqrt(1/3)]
I’m quite pretty in the following variables ...
x1 = -1/2*sqrt(1/3)*y4 + 1/2*sqrt(2)*y1 + 1/6*sqrt(6)*y3 + 1/2*y2
x2 = 3/2*sqrt(1/3)*y4 + 1/2*y2
x3 = -1/2*sqrt(1/3)*y4 - 1/2*sqrt(2)*y1 + 1/6*sqrt(6)*y3 + 1/2*y2
x4 = -1/2*sqrt(1/3)*y4 - 1/3*sqrt(6)*y3 + 1/2*y2
Look at me when I wear my cool variables
3*y1^2 + 3*y2^2 - y3^2 - y4^2
Un point délicat peut être la résolution du polynôme caractéristique. Noustrouvons
(1 + λ)λ3 − 5λ2 + 3λ + 9 = 0, (10.544)
mais nous savons que λ = 3 est une solution, donc nous pouvons diviser (Euclide)le membre de gauche de (10.544) par λ − 3 et trouver
(1 + λ)(λ − 3)(λ2 − 2λ − 3) = 0 (10.545)
dont les solutions sont 3 et −1, chacune étant de multiplicité deux.Conseil technique : on peut utiliser Gram-Schmidt séparément sur les deux
vecteurs de valeur propre −1 et sur les deux de valeur propre 3. En effet, ces deux«paquets» de vecteurs propres sont orthogonaux.
Correction de l’exercice 149Une façon économique de procéder est de calculer les mineurs principaux de la
matrice associée. Nous avons
m1 = det
9 −3 6√
2−3 17 2
√2
6√
2 2√
2 10
= det
9 −3 6√
20 48 12
√2
0 2√
2/2
= 0, (10.546)
puis
m2 = det
(
9 −3−3 17
)
= 9 · 17 − 9 = 144, (10.547)
et enfinm3 = det(9) = 9. (10.548)
Deux strictement positifs et un nul, cela fait semi définie positive.
Correction de l’exercice 150
a. Nous y allons avec la méthode des mineurs principaux primaires : det(A) =
−3, det
(
−6 11 −3
)
= 17 et det(−6) = 6.

200 CHAPITRE 10. CORRECTIONS
Nous sommes dans le cas où les mineurs principaux primaires d’ordre impairssont plus petits que zéros tandis que ceux d’ordre pair sont plus grands quezéro. La forme quadratique correspondante est dont définie négative.
b. Dans ce cas, les mineurs principaux primaires sont 775, −39 et 5. La formequadratique est de genre indéfinie.
Correction de l’exercice 151<+CorrexoMatrices-0002+>
Correction de l’exercice 152<+CorrexoMatrices-0003+>
Correction de l’exercice 153<+CorrexoMatrices-0004+>
Correction de l’exercice 154<+CorrexoMatrices-0005+>
Correction de l’exercice janvier 2009, 1Les différentes figures sont à la figure 10.10. L’échelle n’est pas écrite sur les
graphiques. Il est vivement conseillé d’essayer de la mettre, ainsi qu’être capa-ble de donner les coordonnées des points d’intersections avec les axes, des pointsd’inflexions, et tout le reste.
Correction de l’exercice janvier 2009, 2Commençons par mettre le nombre proposé sous forme trigonométrique ρeiθ.
La norme de 1 +√
3 est√
1 + (√
3)2 = 2. Affin de trouver l’angle θ, nous savonsque
1 +√
3i = 2(12
+
√3
2i), (10.549)
qui doit être égal à 2eiθ. L’angle θ est donc l’angle qu’il faut pour que cos(θ) = 12
et sin(θ) =√
32
, c’est à dire θ = π/3.
Nous devons donc calculer(
2eiπ/3)39
= 239e39iπ/3 = −239, parce que 39π3
= 12π,et que l’angle 12π est le même que l’angle π et que eiπ = −1.
Correction de l’exercice janvier 2009, 3On sait que z est solution, c’est-à-dire
anzn + . . . + a1z + a0 = 0

201
donc en prenant la conjugué des deux membres de l’équation, on obtient
anzn + . . . + a1z + a0 = 0
et, comme z1z2 = z1z2 et z1 + z2 = z1 + z2 pour tout z1, z2 ∈ C, on en déduit
anzn + . . . + a1z + a0 = 0
c’est-à-dire, comme a = a pour tout a ∈ R,
anzn + . . . + a1z + a0 = 0
ce qui montre que z est solution de l’équation.
Correction de l’exercice janvier 2009, 4
a. Nous pouvons par exemple donner le critère de la racine. Soit∑
k ak unesérie dont les termes sont positifs. Supposons que la limite
limk→∞
k√
ak
existe et vaut α, alors si α < 1, la série converge, et si α > 1 la série diverge.
b. Cette série converge par application du critère de la racine ; en effet, dans cecas ci ak = 1
ln(k)k et donc
limk→∞
k√
ak = limk→∞
1ln(k)
= 0 < 1.
Correction de l’exercice janvier 2009, 5Supposons
√2 soit un rationnel. Alors il existe p, q des entiers positifs tels que
√2 =
p
q
soit une fraction irréductible.On en déduit que 2q2 = p2 donc p2 est pair, et donc p est pair. En posant
p = 2r, on obtient alors 2q2 = 4r2, et par conséquent q2 = 2r2 est pair également,et de même pour q. On en déduit que la fraction p
qn’était pas irréductible puisque
p et q sont tous les deux divisibles par 2. Contradiction.
Correction de l’exercice janvier 2009, 6Un hexagone régulier de côté a est la réunion de 6 triangles équilatéraux de
côté a. Chacun de ces triangles a une base a et une hauteur√
a2 − a2
4=
√3a2
(parPythagore), donc l’aire de l’hexagone est :
3a
√3a
2=
3√
32
a2

202 CHAPITRE 10. CORRECTIONS
Correction de l’exercice janvier 2009, 7Charly a cinq couleurs a disposition, et a huit éléments à repeindre.En ce qui concerne les portières, sans tenir compte de la restriction, il a 54
possibilités différentes. Or il faut qu’au moins une des portières soit verte, ce quiexclut les 44 cas où cette couleur n’est pas utilisée. Soit 54 − 44 possibilités.
Pour le pare-chocs, il a 4 possibilités, et pour chacun des trois autres éléments,5 possibilités.
Au total, il y a donc 4 × 53 × (54 − 44) possibilités pour barioler la voiture deCharles-Edouard.
Correction de l’exercice janvier 2009, 8Pour n = 1, c’est évident. Supposons pour n fixé
fn(x) =n − (n − 1)x(n + 1) − nx
et calculons :
fn+1(x) = f(fn(x))
= f
(
n − (n − 1)x(n + 1) − nx
)
=1
2 − n−(n−1)x(n+1)−nx
=(n + 1) − nx
2((n + 1) − nx) − (n − (n − 1)x)
=(n + 1) − ((n + 1) − 1)x((n + 1) + 1) − (n + 1)x
ce qui est bien la formule pour fn+1(x).
Correction de l’exercice janvier 2009, 9
a. La dérivée de la fonction f est donnée par
f ′(x) = limh→0
f(x + h) − f(x)h
b. Soit x ∈ R, alors
(fg)′(x) = limh→0
(fg)(x + h) − (fg)(x)h
= limh→0
f(x + h)g(x + h) − f(x)g(x + h) + f(x)g(x + h) − f(x)g(x)h
= limh→0
(f(x + h) − f(x))g(x + h) + f(x)(g(x + h) − g(x))h
= f ′(x)g(x) + f(x)g′(x)

203
en ayant utilisé la règle « la limite du produit est le produit des limites lorsquecelles-ci existent ».
Correction de l’exercice janvier 2009, 10Soit f : [a, b] → R une fonction continue, et dérivable sur ]a, b[. Alors il existe
c ∈ ]a, b[ tel que
f ′(c) =f(b) − f(a)
b − a. (10.550)
Un dessin illustrant ce théorème est donné à la figure 10.11.
Correction de l’exercice janvier 2009, 11Si f et g sont deux fonctions dérivables en a et telles que f(a) = g(a) = 0, et
si de plus la limite
limx→a
f ′(x)g′(x)
(10.551)
existe. Alors
limx→a
f(x)g(x)
= limx→a
f ′(x)g′(x)
(10.552)
Correction de l’exercice janvier 2009, 12Soit f : P → {0, 1, . . . , n − 1} la fonction qui a chaque personne (les éléments
de P ) associe son nombre d’amis présents à la soirée.Supposons d’abord que tout le monde ait au moins un ami. Alors f est à valeurs
dans {1, . . . , n − 1} qui contient n − 1 éléments. Or il y a n personnes dans P ,donc f n’est pas injective (principe des tiroirs). Ceci montre qu’au moins deuxpersonnes ont le même nombre d’amis dans ce cas.
Si par contre un des convives n’a aucun ami présent à la soirée, alors soit iln’est pas seul dans ce cas (auquel cas il y a bien deux personnes qui ont le mêmenombre d’amis : zéro), soit il est seul dans ce cas, et les n − 1 personnes restantesont toutes au moins un ami, ce qui nous ramène au premier cas.
Correction de l’exercice janvier 2009, 13Les intersections se trouvent en résolvant e2x +1 = 2aex ce qui se fait en posant
par exemple t = ex, et donc il faut résoudre (pour t > 0) l’équation
t2 − 2at + 1 = 0
dont les solutions existent si |a| ≥ 1 (car le discriminant est 4(a2 −1)) et sont alorsdonnées par
t = a ±√
a2 − 1.

204 CHAPITRE 10. CORRECTIONS
Comme√
a2 − 1 < |a| dès que |a| > 1, on en déduit que t < 0 si a ≤ −1, et t > 0si a ≥ 1, ce qui montre qu’il n’y a d’intersections que pour a ≥ 1.
De plus, le calcul du discriminant et la discussion précédente montrent quel’intersection est unique si a = 1, et cette intersection a lieu en x = ln(1) = 0.
Il reste à voir que la dérivée de e2x + 1 (en x = 0) est égale à la dérivée de 2aex
(en x = 0). Or la première dérivée est 2e2x, et la deuxième est 2aex, ce qui donne2 dans les deux cas pour a = 1 et x = 0.
Correction de l’exercice janvier 2009, 14L’aire d’un carré de périmètre a est a2
16; l’aire d’un cercle de circonférence C
est C2
4π. On cherche à maximiser
f(a, C) =a2
16+
C2
4π
sous la contrainte a + C = 10.On définit
g(a) = 16πf(a, 10 − a) = πa2 + 4(10 − a)2
qu’on cherche à maximiser. Dès lors on résout g′(a) = 0 et on trouve a = 40π+4
, d’oùb = 10π
π+4. Il faut donc couper à a centimètres du bord (ou à b centimètres).
Correction de l’exercice mars 2010, 1Si on veut un rang égal à deux, il faut que la matrice contienne une sous matrice
2×2 de déterminant non nul (le plus simple est la matrice identité). Le plus simplepour obtenir un déterminant nul est d’avoir une ligne de zéros.
On peut donc considérer cette matrice :
1 0 00 1 00 0 0
. (10.553)
Il y a énormément d’autres exemples possibles. En tout cas, il faut une matricecarré (pour que le concept de déterminant ait un sens) de taille au moins égale àtrois.
Correction de l’exercice mars 2010, 2La matrice «augmentée» du système est
2 −1 4 10 2 −6 8
−4 4 (k − 11) 6
. (10.554)

205
Diviser la seconde ligne par deux est toujours une bonne idée pour y voir plusclair. Ensuite on commence à échelonner en faisant L3 → L3 + 2L1 :
2 −1 4 10 1 −3 40 2 k − 3 8
. (10.555)
Ensuite on fait L3 → L3 − 2L2 pour mettre un dernier bon zéro où il faut :
2 −1 4 10 1 −3 40 0 k + 3 0
. (10.556)
Sur cette matrice, on voit tout de suite que la discussion portera sur k = −3 ouk 6= −3. D’ailleurs, en calculant le déterminant de la matrice initiale, on auraitvu qu’il était un multiple de k + 3, donc le déterminant est nul si et seulement sik = −3.
Commençons par k = −3.Dans ce cas, la dernière ligne devient 0 = 0 et on peut la barrer. Il reste deux
équations pour trois inconnues. Posons z = λ, c’est à dire que nous prenons zcomme paramètre. Alors la seconde ligne devient y−3λ = 4, c’est à dire y = 4+3λ.La première ligne devient alors 2x − 4 − 3λ + 4λ = 1, c’est à dire x = (5 − λ)/2.Les solutions sont donc
5−λ2
4 + 3λλ
. (10.557)
Pour chaque λ ∈ R, il y a une solution. Il y a donc une infinité de solutions quicorrespondent au cas de déterminant nul.
Prenons maintenant k 6= −3.Dans ce cas, la dernière ligne devient (k+3)z = 0, c’est à dire z = 0. Les autres
lignes donnent alors y = 4 et x = 5/2. L’unique solution correspondant aux cas dedéterminant non nul est
5/240
. (10.558)
Correction de l’exercice mars 2010, 3Si on n’a aucune idée de la solution, le mieux est d’essayer sur un petit exemple
pour se donner une idée. Prenons par exemple cette petite matrice dont la sommedes éléments de chaque ligne est 4 :
(
1 32 2
)
. (10.559)

206 CHAPITRE 10. CORRECTIONS
Cherchons les vecteurs propres pour la valeur propre 4. Le système à résoudre est(
1 32 2
)(
xy
)
= 4
(
xy
)
, (10.560)
dont les solutions sont x = y, c’est à dire les multiples de
(
11
)
. Qu’est-ce qu’on
parie que dans le cas de l’exercice la réponse sera que le vecteur propre est
11111
? (10.561)
Regardons donc le produit
a11 a12 a13 a14 a15
a21 a22 a23 a24 a25
a31 a22 a33 a34 a35
a41 a42 a43 a44 a45
a51 a52 a53 a54 a55
11111
=
a11 + a12 + a13 + a14 + a15
a21 + a22 + a23 + a24 + a25
a31 + a32 + a33 + a34 + a35
a41 + a42 + a43 + a44 + a45
a51 + a52 + a53 + a54 + a55
. (10.562)
Par hypothèse, le vecteur du membre de droite vaut
ααααα
= α
11111
, (10.563)
donc on a bien un vecteur propre de valeur propre α.
Correction de l’exercice mars 2010, 4Vu qu’on est dans R3, l’espace E est au maximum de dimension 3. Il est
directement évident que les deux premiers sont linéairement indépendants. Doncdim(E) ≥ 2. La question est de savoir si il est de dimension 2 ou 3.
Nommons v1, v2, v3 et v4 les quatre vecteurs proposés.Il y a de nombreuses façons de procéder. Une façon est de considérer la matrice
formée par les 4 vecteurs proposés et de voir, en l’échelonnant, quelle est la matricecarré de taille maximum qu’on peut trouver dedans. En partant de
1 0 3 23 2 7 22 −1 7 6
, (10.564)

207
on peut arriver à
1 0 3 21 0 3 22 −1 7 6
. (10.565)
Dans cette matrice, c’est tout de suite visible qu’il n’y a aucune matrice de taille3 de déterminant non nul parce que toute la première ligne est égale à la seconde.
Une autre façon de procéder (plus piétonne) est de vérifier si les vecteurs v3
et/ou v4 sont des combinaisons de v1 et v2. Si ils sont de telles combinaisons, alorsles deux premiers génèrent tout E. Si en revanche v3 n’est pas une combinaison dev1 et v2, alors ce sont ces trois vecteurs v1, v2 et v3 qui généreront tout E.
Vérifier si trois vecteurs dans R3 sont linéairement indépendants revient à cal-culer le déterminant de la matrice formée par ces trois vecteurs. Dans notre cas,on doit vérifier les deux déterminants
det
1 0 33 2 72 −1 7
(10.566)
et
det
1 0 23 2 22 −1 6
. (10.567)
Le calcul montre que ces deux déterminants sont nuls, donc chacun des deuxvecteurs v3 et v4 n’est combinaison linéaire de v1 et v2.
Une base de E est donc donnée par {v1, v2}. La dimension est donc 2.Pour trouver une base orthogonale, on utilise Gram-Schmidt. Nous posons
f1 = v1, et puis
f2 = v2 − 〈v2, f1〉〈f1, f1〉f1 =
02
−1
− 4
14
132
=
17
−28
−11
. (10.568)
Une base orthogonale de E est donc donnée par
f1 =
132
, et f2 =
−28
−11
. (10.569)
Vérification : 〈f1, f2〉 = −2 + 24 − 22 = 0. Notez que j’ai «oublié» le 17
dans f2
parce que de toutes façons, il n’est pas encore normé.Une base orthonormale se trouve en divisant par la norme :
g1 =1√14
132
, et g2 =
13√
21
−28
−11
. (10.570)

208 CHAPITRE 10. CORRECTIONS
Correction de l’exercice TP3.1
a. f(x) = ln(x2 + 1), utiliser la formule (ln(u))′ = u′
u,
f ′(x) =2x
x2 + 1, (10.571)
f ′(2) = 45.
b. g(x) = xx, passer au logarithme :
xx = eln(xx) = ex ln(x). (10.572)
À partir de là, nous utilisons la formule (eu)′ = u′eu avec u(x) = x ln(x). Ceque nous trouvons est
g′(x) = xx(ln(x) + 1), (10.573)
g′(e) = 2ee.
c. h(x) = xesin(x), cela est un produit de x par esin(x). Chacun des deux facteursest relativement facile à dériver. Ce que nous trouvons à la fin est
h′(x) = x cos(x)esin(x) + esin(x), (10.574)
h′(π6) = π
√3
12
√e +
√e.
d. ℓ(x) = x5+cos(x)
, c’est une fraction sans surprises :
ℓ′(x) =x sin(x)
(
cos(x) + 5)2 +
1cos(x) + 5
, (10.575)
ℓ′(π3) = 2π
√3
363+ 2
11.
Correction de l’exercice TP3.2Nous avons p(t) = a2bt, et nous mesurons
p(2) = a22b = 640 et p(3) = a23b = 5120. (10.576)
Ce qu’il nous faut, c’est trouver les nombres a et b qui satisfont les équations{
a22b = 640 (10.577a)
a23b = 5120. (10.577b)
Affin de résoudre ce système, la subtilité est de prendre le rapport des deux équa-tions pour éliminer le a :
p(2)p(3)
=a22b
a23b=
6405120
=18
. (10.578)

209
Cela fait 22b−3b = 1/8, ou encore 2−b = 1/8, ce qui revient à 2b = 8. Nous trouvonsb = 3. L’équation a22b = 64 devient alors a26 = 640, et donc a = 10. L’équationpour p(t) est maintenant
p(t) = 10 · 23t, (10.579)
et en particulier,p(t + T ) = 23T p(t), (10.580)
et donc on résous l’équation 23T = 2 pour trouver le temps de doublement depopulation : T = 1
3.
Correction de l’exercice TP3.3Les paramètres de la boite sont le rayon R et la hauteur h qui sont contraints
par V = πR2h, et on veut minimiser
S(R, h) = 2πRh + 2πR2. (10.581)
Cela ressemble à une fonction à deux variables (R et h), mais ce n’en est pasune. En effet, dès que R est choisit, h est automatiquement choisit à cause de lacontrainte V = πR2h. Nous pouvons donc remplacer h par V/πR2 dans la fonctionS(R, h), et nous trouvons la surface en fonction de R tout seul :
S(R) =2V
R+ 2πR2. (10.582)
Pour minimiser, nous cherchons l’annulation de la dérivée
S ′(R) = −2V
R2+ 4πR. (10.583)
Nous trouvons S ′(R) = 0 pour
R =(
V
2π
)1/3
, (10.584)
qui est la seule solution réelle. Nous croyons que cela est un minimum et non unmaximum parce que S(R) → ∞ pour R → ±∞. Nous retrouvons la hauteur quel’on cherche en remettant cette valeur de R dans l’équation qui lie R et h :
h =V
πR2= 2−1/3
(V
π
)4/3
. (10.585)
Correction de l’exercice TP3.4La fonction ln(x2 + 5
9) est définie tant que x2 + 5
9> 0, c’est à dire toujours. La
dérivée estf ′(x) =
2x
x2 + 59
, (10.586)
qui a le signe de x. Donc

210 CHAPITRE 10. CORRECTIONS
a. f(x) est croissante pour x > 0,
b. f(x) est décroissante pour x < 0.
Nous calculons la dérivée seconde :
f ′′(x) = − 162x2 − 981x4 + 9x2 + 25
. (10.587)
Le dénominateur est toujours positif, donc cette dérivée a le signe de 9 − 162x2. Ily a un point d’inflexion en
x = ± 13√
2. (10.588)
Il y a un extrema en f ′(x) = 0, c’est à dire en x = 0, et c’est un minimum (regarderla croissance pour le voir).
Il n’y a aucune asymptote parce que f(x) → ∞ pour x → ±∞, et
limx→∞
f(x)x
= 0, (10.589)
voir page 65 du cours.La fonction est tracée à la figure 10.12 .
Correction de l’exercice TP3.5La fonction est g(x) = e−x2
, dont le domaine est R. La dérivée est
g′(x) = −2xe−x2
. (10.590)
Étant donné que l’exponentielle est toujours positive, cela a le signe opposé à x,donc
a. Croissante pour x < 0,
b. décroissante pour x > 0,
et maximum pour x = 0.La dérivée seconde est
g′′(x) = (4x2 − 2)e−x2
, (10.591)
qui s’annule quand x = ±√
12, ce sont les point d’inflexion. Il y a asymptote
horizontale y = 0 en ±∞.Voir la figure 10.13
Correction de l’exercice TP4.1La fonction est dessinée sur la figure 10.14 D’abord, la fonction ne commence

211
à exister qu’à partir de x = −1/2, donc il faut calculer le volume entre −1/2 et 0.En utilisant la formule V = π
∫ ba f(x)2dx, nous devons calculer
V =∫ 0
−1/2e2x(2x + 1)dx. (10.592)
Cela se fait par partie. Nous posons
u = 2x + 1 dv = e2x
du = 2 v =12
e2x.(10.593)
Donc l’intégrale à calculer est
I =∫
e2x(2x + 1) =12
e2x(2x + 1) −∫
e2x = xe2x, (10.594)
et le volume estV = π[xe2x]0−1/2 =
π
2e. (10.595)
Correction de l’exercice TP4.2L’équation homogène est
y′H + 2yH tan(x) = 0, (10.596)
qui donney′
H
yH
= −2 tan(x). (10.597)
En intégrant des deux côtés,
yH(x) = K cos2(x). (10.598)
Afin de trouver la solution générale de l’équation non homogène, nous posons
y(x) = K(x) cos2(x), (10.599)
dont la dérivée est
y′ = K ′ cos2(x) + −2K sin(x) cos(x). (10.600)
En remettant le tout dans l’équation de départ, nous trouvons l’équation suivantepour K :
K ′(x)1
cos(x). (10.601)

212 CHAPITRE 10. CORRECTIONS
Cette intégrale se règle en posant u = sin(x), donc cos(x) =√
1 − u2, donc
∫ 1√1 − u2
du
cos(x)=∫ du√
1 − u2√
1 − u2. (10.602)
Nous avons donc
K(x) =12
ln
(
sin(x) + 1sin(x) − 1
)
+ C. (10.603)
Au final, la solution générale de l’équation différentielle est
y(x) =cos2(x)
2ln
∣∣∣∣∣
sin(x) + 1sin(x) − 1
∣∣∣∣∣+ C cos2(x). (10.604)
I s’agit maintenant de trouver la solution qui vaut zéro lorsque x = π. Pourcela, nous calculons y(π). Ce sont les valeurs absolues du logarithme qui noussauvent la vie, et on trouve qu’avec C = 0, le tout vaut zéro.
Correction de l’exercice TP4.3Nous avons les fonctions
x(t) = et cos(t)
y(t) = et sin(t),(10.605)
et donc les dérivéesx′(t) = et cos(t) − et sin(t)
y′(t) = et sin(t) + et cos(t).(10.606)
Maintenant nous allons utiliser la formule L =∫ t1
t0
√
x′(t)2 + y′(t)2dt. En dévelop-pant les carrés et en regroupant, nous trouvons
L =√
2∫ 4π
0et =
√2(e4π − 1). (10.607)
Reste le délicat point de dessiner la fonction.
Correction de l’exercice TP4.4Le coût total de l’expédition est le coût du personnel plus celui du carburant.
Afin d’exprimer le tout en fonction de v, il faut se rendre compte que la durée del’expédition est la distance à parcourir divisée par la vitesse : d/v. À partir de là,la prix du carburant est
kv2
(
d
v
)
= kdv, (10.608)
et le prix du personnel est
p
(
d
v
)
, (10.609)

213
ce qui donne le coût total en fonction de la vitesse sous la forme
C(v) = kdv +pd
v. (10.610)
Pour en trouver le maximum, il faut trouver la valeur de v où la dérivée de cettefonction s’annule. La dérivée vaut
C ′(v) = kd − pd
v2, (10.611)
et cela vaut zéro pour
v = ±√
p
k. (10.612)
La solution négative est évidement à rejeter. La vitesse optimale est donc
v =√
p/k. (10.613)
Il est intéressant de noter que cette vitesse ne dépend pas de la distance à parcourir.
Correction de l’exercice TP5.1
a. Montrons que la partie est génératrice, c’est à dire que tout polynôme de laforme
ax3 + bx2 + cx + d (10.614)
peut être écrit sous la forme
λ1(1)
+ λ2(1 − x)
+ λ3(1 + x − x2)
+ λ4(1 + x + x2 − x3).
(10.615)
Pour ce faire, nous égalisons les coefficients des termes en chaque puissancede x entre le polynôme (10.614) et (10.615). Nous trouvons
x3; a = −λ4
x2; b = λ4 − λ3
x ; c = λ4 + λ3 − λ2
terme indépendant ; d = λ4 + λ3 + λ3 + λ1,
(10.616)
d’où nous déduisons que
λ4 = −a
λ3 = −b − a
λ2 = −c − b − 2a
λ3 = d + c + 2b + 4a.
(10.617)

214 CHAPITRE 10. CORRECTIONS
Cela montre que chaque vecteur de l’espace considéré s’écrit de façon uniquecomme combinaison des vecteurs de la partie B. Ceci est exactement direque B est une base.
b. Trouver les coefficients de 1 + x + x2 + x3 est facile : il suffit de reprendrela solution (10.617) avec a = b = c = d = 1. Cela fait λ4 = −1, λ3 = −2,λ2 = −4, λ1 = 8.
c. C’est ici que les choses compliquées commencent. Il s’agit d’abord de voirles polynômes de base comme des vecteurs. Cela se fait par l’identificationsuivante :
1 =
1000
, 1 − x =
0111
, 1 + x − x2 =
0010
, 1 + x + x2 − x3 =
0001
.
(10.618)Maintenant nous devons voir comment la dérivation transforme ces vecteursles uns en combinaisons des autres. En effet, dans la matrice de ϕ, la premièrecolonne sera les composantes de l’image du premier vecteur, et ainsi de suite

215
pour les autres colonnes. Nous avons
ϕ
1000
= (1)′ = 0 =
0000
,
ϕ
0100
= (1 − x)′ = −1 =
−1000
,
ϕ
0010
= (1 + x − x2)′ = −2x + 1 = 2(1 − x) − 1
= 2
0100
−
1000
=
−1200
,
ϕ
0001
= (1 + x + x2 − x3)′ = 3(1 + x − x2) + (1 − x) − 3
= 3
0010
+
0100
− 3
1000
=
−3130
.
(10.619)
La matrice de ϕ consiste à mettre les images de ϕ en colonnes, c’est à dire
0 −1 −1 −30 0 2 10 0 0 30 0 0 0
. (10.620)
Correction de l’exercice TP5.2Étant donné que nous avons seulement 3 équations pour 4 inconnues, nous
savons que nous allons pouvoir résoudre en laissant (au moins) une variable dansla solution. Étant donné qu’il n’y a pas de zéros dans la colonne du t, je proposede choisir celle-là : c’est la colonne la moins appétissante, donc autant la choisir.

216 CHAPITRE 10. CORRECTIONS
Au départ, le système s’écrit sous la forme
1 2 1 −1 32 −1 0 1 20 5 2 −3 4
. (10.621)
Nous allons essayer de ne pas casser les zéros déjà présents. La première chose àfaire est d’annuler la première case de la première ligne en utilisant la seconde :L1 → L1 − L2/2. Nous trouvons
0 5/2 1 −3/2 22 −1 0 1 20 5 2 −3 4
. (10.622)
Ensuite, nous pouvons annuler la case du z dans la première ligne en utilisant latroisième : L1 → L1 − L3/2. Nous avons alors
0 0 0 0 02 −1 0 1 20 5 2 −3 4
. (10.623)
La première ligne est maintenant complètement nulle, on peut la barrer. Il ne restedonc que deux équations pour quatre inconnues, et nous pouvons donc choisir uneseconde variable par rapport à laquelle nous ne voulons pas résoudre le système(une variable qui va être reléguée au rang de simple paramètre dans la solution).Étant donné que la colonne des y est sans zéros, nous choisissons celle-là. Lesystème est donc
{
2x − y + t = 2 (10.624a)
5y + 2z − 3t = 4. (10.624b)
Comme nous avons décidé de laisser y et t, ce système est résolu. La premièreéquation donne directement
x =12
(y − t + 2) (10.625)
et la seconde donne
z =12
(3t − 5y + 4). (10.626)
Correction de l’exercice TP5.3Une bonne idée est de lire le point 2.7.1 avant de se lancer dans cet exercice.

217
a. Nous savons que le vecteur
f1 =
111
(10.627)
est sur la droite, et donc ne va pas bouger. Ce vecteur est donc un vecteurpropre de valeur propre 1. Les vecteurs perpendiculaires à la droite vontchanger de signe. Il n’est pas très difficile d’en trouver deux linéairementindépendants. Un premier qui est perpendiculaire à f1 est par exemple
f2 =
10
−1
. (10.628)
Pour vérifier qu’il est perpendiculaire, penser au produit scalaire. Pour entrouver f3 qui est à la fois perpendiculaire à la droite et à f2, prenons leproduit vectoriel :
f3 = f1 × f2 =
∣∣∣∣∣∣∣
e1 e2 e3
1 1 11 0 −1
∣∣∣∣∣∣∣
= −e1 + 2e2 − e3 =
−12
−1
. (10.629)
Par définition, si A est la rotation demandée, nous avons
Af1 = f1
Af2 = −f2
Af3 = −f3
(10.630)
Ce sont donc tous les trois des vecteurs propres, de valeurs propres respec-tivement 1, −1 et −1.Au cas où vous voudriez savoir la matrice de la rotation, il faut d’abordexprimer e1, e2 et e3 en termes de f1, f2 et f3 :
e1 =13
f1 +12
f2 − 16
f3
e2 =13
f1 +13
f3
e3 =13
f1 − 12
f2 − 16
f3
(10.631)
Maintenant, trouver Ae1, Ae2 et Ae3 revient à changer quelque signes dansces équation, et nous trouvons
A =13
−1 2 22 −1 22 2 −1
. (10.632)

218 CHAPITRE 10. CORRECTIONS
Vous pouvez même vous amuser à trouver les valeurs propres et vecteurspropres de cette matrice (vous les savez déjà !).
b. La rotation de 90 degrés autour de Ox laisse ex invariant, puis fait ey → ez
et ez → −ey (ne pas oublier ce signe, faire un dessin !). Nous avons donc
A
100
=
100
,
A
010
=
001
,
A
001
=
0−10
,
(10.633)
et donc la matrice est
A =
1 0 00 0 −10 1 0
. (10.634)
C’est certain que e1 est vecteur propre de valeur propre 1. Pour les autres,voyons l’équation caractéristique :
∣∣∣∣∣∣∣
1 − λ 0 00 −λ −10 1 −λ
∣∣∣∣∣∣∣
= (1 − λ)(λ2 + 1) = 0. (10.635)
Seul λ = 1 est solution, et comme cette racine est une racine simple, il n’ya que un seul vecteur propre correspondant. Nous concluons que e1 (et sesmultiples) est l’unique vecteur propre. Nous pouvons cependant le vérifier enrésolvant l’équation
1 0 00 0 −10 1 0
xyz
=
xyz
. (10.636)
Le système correspondant est
x = x
−z = y
y = z.
(10.637)
Les deux dernières équations imposent y = z = 0, tandis que la premièrelaisse x libre. Nous avons donc bien que les multiples de e1.

219
c. Trouvons d’abord deux vecteurs linéairement indépendants dans le plan x +y + z = 0. Prenons par exemple
f1 =
1−10
(10.638)
et
f2 =
10
−1
. (10.639)
Noter qu’ils ne sont pas perpendiculaires, mais ce n’est pas important. L’im-portant est que ces deux vecteurs soient linéairement indépendants et qu’ilsrestent inchangés par la symétrie considérée. Ils sont donc vecteurs propres devaleur propre 1. Pour trouver un vecteur perpendiculaire au plan (et qui seradonc vecteur propre de valeur propre −1), nous prenons le produit vectoriel :
f3 = f1 × f2 =
∣∣∣∣∣∣∣
e1 e2 e3
1 −1 01 0 −1
∣∣∣∣∣∣∣
= e1 + e2 + e3 =
111
. (10.640)
Cela est un troisième vecteur propre. Sa valeur propre est −1.
d. La symétrie autour de l’axe Oz fait en sorte que ez ne change pas, et que lesdeux autres changent de signe. Ensuite, la dilatation de facteur 5 multiplietout par 5. Nous avons donc au final
001
→
005
010
→
O−50
100
→
−500
.
(10.641)
Ce sont les trois vecteur propres, de valeurs propres 5, −5 et −5.
Correction de l’exercice TP5.4Une matrice est inversible si et seulement si son déterminant est non nul. Ici,
le déterminant vautdet(M) = a(a2 − b2). (10.642)

220 CHAPITRE 10. CORRECTIONS
La matrice M sera donc non inversible si a = 0 ou bien si a = ±b. Dans tous lesautres cas, elle est inversible.
Pour les vecteurs et valeurs propres, nous regardons l’équation caractéristique∣∣∣∣∣∣∣
a − λ 0 bb a − λ 0b 0 a − λ
∣∣∣∣∣∣∣
= (a − λ)(
(a − λ)2 − b2)
= 0. (10.643)
La première valeur propre évidente est λ1 = a. Les deux autres sont les solutionsde (a − λ)2 − b2, qui est une équation usuelle du second degré. Les solutions sonta + b et a − b. Au final :
λ2 = a
λ2 = a + b
λ3 = a − b.
(10.644)
La proposition 14.8 de la page 202 du cours dit que si une matrice a trois valeurspropres distinctes, alors elle est diagonalisable. Ici, c’est le cas tant que b 6= 0. Sib = 0, alors les choses sont moins claires. Lorsque a = 0, l’équation caractéristiquedevient
(a − λ)3 = 0, (10.645)
dont la solution λ = a est une racine triple. Il y a donc de fortes chances qu’il yait trois vecteur propres correspondants. En effet, dans le cas b = 0, la matrice Mse réduit à
Mb=0 =
a 0 00 a 00 0 a
. (10.646)
Là, c’est bien clair que les trois vecteurs de base e1, e2 et e3 sont vecteurs propresde valeur propre a (sauf si a = 0). En résumé, la matrice M est diagonalisabletout le temps sauf si a = 0 et b = 0 en même temps.
Correction de l’exercice janvier 2009, 5Une technique de base dans ces exercices est de savoir que
|truc| < machin (10.647)
implique la double inégalité
− machin < truc < machin, (10.648)
lorsque machin > 0.
a. x ∈ [−2, 2].

221
b. Ici, nous appliquons la règle (10.648) :
− 1 < 5 − 1x
< 1, (10.649)
et nous résolvons les deux inégalités séparément. Les solutions du problèmeseront l’intersection des solutions.La première donne −5 < −1/x, et donc 6 > 1/x. Cette inégalité est certaine-ment vraie pour les x négatifs. Pour les x > 0, elle est vraie quand x > 1/6.Les solutions de cette première inégalité sont donc ]−∞, 0[ ∪ ]1
6, ∞[.
La seconde inégalité donne 1x
> 4. Cette inégalité n’est valable pour aucunnégatif. Pour les positifs, les solutions sont x ∈ ]0, 1
4[.
La solution de l’exercice est donc donnée par(
]−∞, 0[ ∪ ]16
, ∞[)
∩ ]0,14
[. (10.650)
C’est à dire x ∈ ]16, 1
4[.
c. Étant donné que les valeurs absolues sont positives, nous pouvons inverserles fractions (en changeant le sens de l’inégalité) et nous avons
|x + 2| < |x − 1|. (10.651)
Nous décomposons cette inégalité en quatre possibilités selon que x + 2 etx − 1 soient positifs ou négatifs :
(a) x + 2 ≥ 0 et x − 1 ≥ 0, conditions remplie lorsque x ≥ 1
(b) x + 2 ≥ 0 et x − 1 ≤ 0, conditions remplie lorsque x ∈ [−2, 1]
(c) x + 2 ≤ 0 et x − 1 ≥ 0, conditions jamais remplie.
(d) x + 2 ≤ 0 et x − 1 ≤ 0, conditions remplie lorsque x ≤ −2
Résolvons l’inéquation dans les quatre cas. Le premier cas donne |x + 2| =x + 2 et |x − 1| = x − 1, et donc
x + 2 < x − 1 (10.652)
Cette inéquation n’est jamais satisfaite et ne fournit donc aucune solutions.Le second cas donne |x + 2| = x + 2 et |x − 1| = −x + 1, et donc
x + 2 < −x + 1, (10.653)
ce qui donne x < −1/2. Ces solutions ne sont des vraies solutions de l’exerciceque lorsque x ∈ [−2, 1]. Ce second cas fournit donc les solutions x ∈ [−2, −1
2[.

222 CHAPITRE 10. CORRECTIONS
Le troisième cas n’est pas à traiter.Le quatrième cas donne
− x − 2 < −x + 1, (10.654)
qui est toujours satisfaite. Les solutions fournies par ce cas sont donc x ∈]−∞, −2].Au final, les solutions de l’exercice sont
x ∈ ]−∞, −12
[ \ {−2}. (10.655)
Pourquoi retirer −2 ? Simplement parce que −2 est exclu dès le départ parles conditions d’existence.
d.
e. Nous traduisons le problème en
− 1 ≤ x2 − 2 ≤ 1. (10.656)
La première inégalité est x2 − 1 ≥ 0. (un petit tableau de signe pour cebinôme ?). Les solutions sont x ∈ ]−∞, −1] ∪ [1, ∞[.Les solutions de la seconde sont x ∈ [−
√3,
√3].
L’intersection des solutions des deux inégalités est
x ∈ [−√
3, −1] ∪ [1,√
3]. (10.657)
f.
g. Ici encore, on coupe en deux inégalités
− 1 < 3 − 2x < 1. (10.658)
Les solutions sont respectivement 2 > x et x > 1 et donc x ∈ ]1, 2[.
Correction de l’exercice janvier 2009, 6
a. sup E = 1 et 1 ∈ E, donc max E = 1. Par contre, inf E = 0 et 0 /∈ E, doncil n’y a pas de minimum.
b. Ici, 0 est dans l’ensemble, donc la différence avec le précédent est que min E =0.
c.
d.
e. Pour rappel, 0 ∈ Q et√
2 /∈ Q. Il n’y a donc pas de minimum (parce que 0n’est pas dans l’ensemble), mais inf E = 0 et max E = sup E =
√2.

223
f. Dans la suite des 1n
+ (−1)n, un terme sur deux s’approche de 1 et l’autreterme sur deux s’approche de −1 (dessiner sur un graphe les cinq ou sixpremiers termes pour s’en persuader). Nous avons donc inf E = −1 etmax E = sup E = 1
2+ 1 = 3
2. Il n’y a pas de minimum.
Correction de l’exercice janvier 2009, 7Prouvons l’égalité (8.1b). Il n’y a que deux possibilités. Soit a > b, soit a < b.
Si a > b, alors |a − b| > 0 et nous pouvons supprimer les valeurs absolues. Ce quenous avons est alors
12
(a + b + a − b) = a, (10.659)
et effectivement, quand a > b, nous avons sup{a, b} = a. Par contre, si noussupposons que a < b, nous savons que |a − b| = −(a − b) et donc
12
(a + b + |a − b|) =12
(a + b − a + b) = b. (10.660)
Correction de l’exercice janvier 2009, 8L’ensemble A est alors un singleton. En effet, si A possédait deux éléments
différentsx et y, il y aurait forcément un des deux qui est plus grand que l’autre.Supposons que x > y. Dans ce cas,
inf A ≤ y < x ≤ sup A, (10.661)
ce qui serait contraire à l’hypothèse.
Correction de l’exercice janvier 2009, 9Nommons B = { 1
x| x ∈ A}. Nous allons procéder en plusieurs étapes. D’abord,
nous montrons que 1/ inf A est un majorant de B, et ensuite, nous montrerons que1/ inf A est plus petit que tous les majorants.
Pour tout x dans a, nous avons inf A ≤ x, et donc
1inf A
≥ 1x
. (10.662)
Étant donné que inf A > 0, nous pouvons inverser les deux membres en retournantle sens de l’inégalité :
1inf A
≥ y (10.663)
pour tout y ∈ B, ce qui signifie que 1/ inf A est un majorant de B.

224 CHAPITRE 10. CORRECTIONS
Soit maintenant m, un majorant de B. Nous voulons prouver que m ≥ 1/ inf A,ou encore que 1/m ≤ inf A. Étant donné que m est un majorant de B, nous avonsque pour tout x ∈ A,
m ≥ 1x
1m
≤ x
1m
≤ inf A.
(10.664)
Correction de l’exercice janvier 2009, 10Remarquons pour commencer que inf et inf B existent parce que A et B sont
bornés. Prouvons que inf B ≤ inf A. Par définition, inf B ≤ x pour tout x ∈ B.Étant donné que A ⊆ B, nous avons en particulier que inf B ≤ x pour tout x ∈ A.Cela prouve que inf B est un minorant de A, et donc que inf B ≤ inf A.
Correction de l’exercice janvier 2009, 11Vérifions avec n = 2 :
1 + 3 = 4 = 22, (10.665)
c’est bon.Supposons maintenant avoir prouvé la thèse pour un certain n. Nous allons
montrer qu’alors la thèse est encore vraie pour n + 1. En écrivant la formule pourn + 1, nous avons
1 + 3 + 5 + . . . + (2n − 1)︸ ︷︷ ︸
= n2 par hyp. de réccurence
+2(n + 1) − 1 = n2 + 2n + 2 − 1 = (n + 1)2, (10.666)
ce qu’il fallait.
Correction de l’exercice janvier 2009, 12Supposons avoir réussi pour n, et regardons ce que devient la formule proposée
avec n + 1 :1
1 · 2+ . . . +
1n(n + 1)
︸ ︷︷ ︸
= n/(n + 1) par hyp. de récurence
+1
(n + 1)(n + 2). (10.667)
En mettant au même dénominateur, nous trouvons
n(n + 2) + 1(n + 1)(n + 2)
=n2 + 2n + 1
(n + 1)(n + 2)=
n + 1n + 2
, (10.668)
comme il le fallait.

225
Correction de l’exercice janvier 2009, 13Pour n = 1, on a 1 + x ≥ 1 + n, ce qui est manifestement vrai. Pour n + 1,
nous avons
(1 + x)n+1 = (1 + x)(1 + x)n ≥ (1 + x)(1 + nx)
= 1 + nx + x + nx2︸︷︷︸
≥0
≥ 1 + x(n + 1),
(10.669)
ce qui est bien la thèse avec n + 1.
Correction de l’exercice janvier 2009, 14Étant donné que l’inconnue x apparaît seulement dans la combinaison e2x, il
est naturel de poser y = e2x. Nous avons alors e−2x = 1y
et l’équation à résoudredevient
y − 2y
− 1 = 0 (10.670)
où nous savons que y 6= 0 parce qu’une exponentielle ne s’annule jamais. Enmultipliant par y, nous trouvons une équation du second degré y2 − y − 2 = 0,dont les solutions sont
y =1 ± 3
2, (10.671)
c’est à dire y = 2 ou y = −1. La seconde possibilité doit être rejetée parce qu’elle necorrespond à aucune solution en x : e2x = −1 est impossible. La seconde solution,y = 2, donne
e2x = 2
2x = ln(2)
x =ln(2)
2.
(10.672)
La solution de l’exercice est donc x = ln(2)/2. Cette solution peut aussi êtreexprimée sous la forme ln(
√2).
Remarque 4.Une erreur classique est de prendre le logarithme des deux membres de l’équationet d’écrire
ln(e2x) − 2 ln(e−2x) = ln(1). (10.673)
La fonction logarithme n’est pas une fonction linéaire. Il n’est donc pas vrai queln(a + 2b) = ln(a) + 2 ln(b).
Parmi les variantes de cette erreur, notons l’oubli de prendre le logarithmedu second membre : laisser le 1 inchangé est une circonstance aggravante. Si onprend le logarithme du membre de gauche, il faut aussi prendre celui du membre

226 CHAPITRE 10. CORRECTIONS
de droite. Il est également faux de croire que ln(1) = 1 ou que ln(1) = e. Que vautle logarithme de 1 ?
Correction de l’exercice janvier 2009, 15
a. x = 3.
b. On peut poser y = 2x−1 et alors 2x−3 = y/4, 23−x = 4/y et 21−x = 1/y. Ainsi,on a l’équation suivante pour y :
y − y
4=
4y
− 1y
. (10.674)
Étant donné que y = 0 n’est pas possible, on peut multiplier tout par y etobtenir une équation du second degré en y :
3y2
4− 3 = 0, (10.675)
ou encore y2 − 4 = 0, ce qui donne les solutions y = 2 et y = −2. La solutiony = 2 donne 2x−1 = 2, et donc x = 2. La solution y = −2 donne 2x−1 = −2qui est impossible. La solution de l’exercice est donc x = 2.Noter qu’on peut également poser y = 2x ou bien y = 2x−3. Ces substitutionsmènent à des calculs un peu différents, mais c’est tout aussi bien.
c. En posant y = ex, nous tombons sur l’équation
y2 − 6y + 5 = 0, (10.676)
dont les solutions sont y = 1 et y = 5. Les solutions en x sont donc x =ln(1) = 0 et x = ln(5).
d.
e.
f. Le problème de cet exercice est le logarithme en base x. Notez déjà les con-ditions d’existence : x ne peut pas être négatif, ni nul, ni égal à un. Ensuite,nous utilisons la formule de changement de base des logarithmes pour trans-former logx en log2 :
logx(2) =log2(2)log2(x)
. (10.677)
La fraction se simplifie du fait que log2(2) = 1. L’équation que nous devonsregarder devient donc :
2 log2(x) +1
log2(x)= 3. (10.678)

227
La bonne idée est de poser y = log2(x) et de trouver l’équation
2y2 − 3y + 1 = 0, (10.679)
dont les solutions sont y = 1 et y = 1/2. La solution log2(x) = 1 donne x = 2et la solution log2(x) = 1
2donne x =
√2.
g. Avant de commencer, notez les conditions d’existence 1−x > 0 qui demandex < 1. Nous savons que log4(A) < 0 lorsque A < 1. Cela est valable pourtoute expression A, tant que la base du logarithme est plus grande que 1.Donc les solutions de l’équation sont données par x > 0. En tenant comptedes conditions d’existence
x ∈ ]0, 1[. (10.680)
h. La fonction
x 7→(1
3
)x
(10.681)
étant décroissante, l’équation est vraie quand
3x > 2x − 9, (10.682)
c’est à dire pour x > −9.
Correction de l’exercice janvier 2009, 16
a. Dans le cercle trigonométrique, nous avons cos(x) = 1 lorsque x = 0. Lessolutions sont donc
x ∈ {. . . , −4π, −2π, 0, 2π, 4π, . . .} = {2kπ}k∈Z. (10.683)
b.
c.
d.
e. Comme à chaque fois que l’inconnue se trouve dans une fonction spéciale(cosinus, logarithme, exponentielle), un petit changement de variable est toutindiqué. Dans ce cas ci nous posons y = cos(3x), et nous trouvons l’équation
− y2 +52
y − 1 = 0, (10.684)
dont les solutions sont y = 2 et y = 1/2.

228 CHAPITRE 10. CORRECTIONS
La solution y = 2 correspond à cos(3x) = 2, qui n’a aucune solution. Lasolution y = 1/2 par contre corresponds à cos(3x) = 1
2. Cela donne les
solutions suivantes pour x :
x =π
6+
2kπ
3(10.685a)
x =π
2+
2kπ
3(10.685b)
f.
g.
h. Nous savons que sin(2x) = 0 lorsque 2x = kπ, c’est à dire
x =kπ
2. (10.686)
Ici, comme partout nous sous-entendons k ∈ Z.
i. La fonction cosinus ne passe jamais par la valeur 4.
j. Sur le cercle trigonométrique, nous avons sin(x) = cos(x) lorsque x = π4,
mais aussi lorsque x = 5π4
. Les solutions sont donc
x =π
4+ k
π
2. (10.687)
k. La somme cos2(x) + sin2(x) fait toujours 1, il n’y a donc pas de solutions.
l. Nous savons que cos(y) = 12
lorsque y = π/3 et −π/3. Pour toutes les valeursintermédiaires, cos(y) < 1
2. Étant donné que nous regardons la valeur absolue,
les valeurs de y entre 2π/3 et 4π/3 sont également à prendre. Au final,
2x ∈ ]−π
3,π
3[ + 2kπ ∪ ]
2π
3,4π
3[ + 2kπ
= ]−π
3,π
3[ + kπ.
(10.688)
m. Prenons le sinus des deux membres de arcsin(x) = −π4. Le premier membre
devient x, tandis que le second membre devient sin(−π/4) = −1/√
2. Lasolution est donc
x = − 1√2
. (10.689)
Correction de l’exercice janvier 2009, 17Pour rappel, l’inverse de la fonction f est donnée par
f−1(y) = {x | f(x) = y}. (10.690)
Cela est une fonction pour les valeurs de y où l’ensemble se réduit à un singleton.

229
a. L’équation à résoudre est5√
x + 1 = y. (10.691)
Donc nous avons f−1(y) = y5−1. Notez que cette fonction est définie partout,mais la fonction de départ f ne prend que des valeurs positives. Par con-séquent, la fonction f−1 ne doit être vue que entre 0 et ∞.
b. Cette fonction a une asymptote verticale en x = −4 et prend toutes lesvaleurs réelles sauf 3. Son inverse va donc a priori être définie sur R \ {3}.Résolvons l’équation qui donne g−1(y) :
y =3x − 1x + 4
(10.692)
par rapport à x. La réponse est que
g−1(y) =1 + 4y
3 − y. (10.693)
Notez la condition d’existence y 6= 3. La fonction de départ ne prenant jamaisla valeur 3, cette condition d’existence n’en est pas vraiment une parce quef−1 n’était déjà définie que sur R \ {3}.
Correction de l’exercice janvier 2009, 18
a. Cette fonction est une très bonne candidate à l’utilisation de l’étau. En effet,nous avons une fonction trigonométrique (sin(x) cos(x)) multipliée par unefonction qu’on connait bien (1/x). Pour tout x > 0, nous avons les inégalités
− 1x
≤ sin(x) cos(x)x
≤ 1x
(10.694)
Les deux fonctions ± 1x
tendent vers zéro lorsque x va vers l’infini ; par con-séquent la fonction au milieu tend vers zéro. Note que l’on a utilisé le faitque −1 ≤ sin(x) cos(x) ≤ 1.
b. La fonction est tracée sur la figure 10.15 Nous commençons par faire lesmanipulations suivantes :
x + sin(x)x − sin(x)
=x(
1 + sin(x)x
)
x(
1 − sin(x)x
) =1 + sin(x)
x
1 − sin(x)x
. (10.695)
En utilisant la règle de l’étau, nous savons que limx→∞sin(x)
x= 0. Par con-
séquent nous avons
limx→∞
x + sin(x)x − sin(x)
= 1. (10.696)
Remarque que, à côté de fonctions qui tendent vers l’infini, le sinus peut êtreconsidéré comme une constante.

230 CHAPITRE 10. CORRECTIONS
Correction de l’exercice janvier 2009, 19Non, sauf si elle est constante.
Correction de l’exercice janvier 2009, 20
a. Ici, il faut multiplier et diviser par la binôme conjugué et d’appliquer leproduit remarquable pour faire disparaître les racines du numérateur.
√x2 + 1 −
√x2 − 1 =
(√x2 + 1 −
√x2 − 1
) (√x2 + 1 +
√x2 − 1
)
(√x2 + 1 +
√x2 − 1
)
=x2 + 1 − (x2 − 1)
(√x2 + 1 +
√x2 − 1
)
=2
(√x2 + 1 +
√x2 − 1
) .
(10.697)À partir de cette dernière expression, il est clair que
limx→±∞
= 0. (10.698)
b. Ici, l’astuce est de multiplier et diviser par le binôme conjugué de ce qui setrouve au numérateur :
√x + 4 − 2
x=
(√x + 4 − 2
) (√x + 4 + 2
)
x(√
x + 4 + 2) . (10.699)
L’avantage de cette façon de faire est qu’on peut maintenant utiliser le pro-duit remarquable (A + B)(A − B) = A2 − B2 au numérateur pour fairedisparaître la racine. Après simplifications, nous nous retrouvons avec
1√x + 4 + 2
, (10.700)
dont la limite pour x → 0 est 14.
Correction de l’exercice janvier 2009, 21
a. Cet exercice, comme beaucoup qui contiennent un cosinus ou un sinus enfacteur, se traite avec la règle de l’étau. En effet, étant donné que sin( 1
x) est
coincé entre −1 et 1, nous avons toujours les inéquations
− x ≤ x sin(1x
) ≤ x. (10.701)
Or, nous savons que −x et x tendent tous les deux vers zéro lorsque x tendvers zéro. Nous concluons que ce qui se trouve au milieu tend également verszéro lorsque x → 0.

231
b. Ce genre d’exercices avec un x dans l’exposant d’une fraction doit faire penserà la limite qui définit le nombre e. Commençons par inverser la fraction enmettant un signe dans l’exposant, et séparons en deux facteurs :
(x
x + 1
)x+2
=(
x + 1x
)−x−2
=(
x + 1x
)−x (x + 1x
)−2
(10.702)
Le second facteur tend vers 1 lorsque x tend vers l’infini. Pour le second,
(x + 1
x
)−x
=(
1 +1x
)−x
=((
1 +1x
)x)−1
. (10.703)
La limite du tout fait donc e−1.
c. La subtilité de cet exercice est de faire apparaître la limite limx→0 sin(x)/x =1 que l’on connaît. Pour ce faire, on commence par multiplier et diviser parx :
sin(αx)sin(βx)
=x
x
sin(αx)sin(βx)
(10.704)
À ce niveau, nous avons les combinaisons sin(αx)/x et x/ sin(βx) qui appa-raissent. Ce n’est pas encore tout à fait ce que l’on veut. Nous multiplionset divisons par αβ pour mettre tout comme il faut :
sin(αx)sin(βx)
=x
x
αβ
αβ
sin(αx)sin(βx)
(10.705)
La limite de cette expression se décompose en trois morceaux. D’abord laconstante α/β, et ensuite les deux limites
limx→0
βx
sin(βx)→ 1 (10.706a)
limx→0
sin(αx)αx
→ 1. (10.706b)
La réponse est donc que
limx→0
sin(αx)sin(βx)
=α
β. (10.707)
d. Pour cet exercice et les autres avec les exponentielles, allez voir le très completrecueil d’exercices de première année en physique et math de l’ULB 9 dansla section « calcul de limites ».
9. http ://student.ulb.ac.be/ lclaesse/CdI1.pdf

232 CHAPITRE 10. CORRECTIONS
e. Pour cet exercice, on peut mettre le plus haut degré de x en évidence ensortant le x2 de la racine. Ce dernier sort sous la forme de la valeur absolue :√
x2 = |x|. De plus, lors de la simplification par x, la valeur absolue setransforme en ±x suivant que x est positif ou négatif. Nous avons
√x2 + 1 − x
x − 2=
|x|√
1 + 1x
− x
x(1 − 2x)
=±√
1 + 1x2 − 1
1 − 2x
. (10.708)
Lorsqu’on fait la limite x → ±∞, le dénominateur tend de toutes façons versun. Le numérateur tend, lui, vers zéro si le signe est positif et vers −2 si lesigne est négatif. Donc
limx→∞ = 0 (10.709a)
limx→−∞
= −2 (10.709b)
f. Il s’agit d’utiliser l’astuce du binôme conjugué tant pour le numérateur quepour le dénominateur. Il faut donc multiplier et diviser par
√x + 2j + 2 et
par√
x + 7 + 3 en même temps. En utilisant les produits remarquables, eten simplifiant par (x − 2), on trouve
√x + 7 + 3√x + 2 + 2
, (10.710)
dont la limite vautlimx→2
=32
. (10.711)
g. Si on développe le (x + h)3, nous trouvons au numérateur
x3 + 3hx2 + 3xh2 + h3 − x3. (10.712)
Les x3 se simplifient et il ne reste plus que des termes qui contiennent h.En écrivant la fraction complète, les h se simplifient avec le dénominateur etnous tombons sur
limh→0
2x2 + x2 = 3x2 (10.713)
qui ne dépend plus de h.
Correction de l’exercice janvier 2009, 22Pour la continuité, ces exercices se réduisent à calculer la limite des fonctions
en le point à problème, et vérifier si cette limite est égale ou non à la valeur de lafonction en ce point, en vertu du théorème qui lie la limite et la continuité.

233
a. Cette fonction est définie partout, et vu que sin(x)/x → 1, elle est continuepartout.
b. Elle est définie partout, et elle est continue parce que
limx→0
x sin(1x
) = 0. (10.714)
Cette limite a été calculée à l’exercice janvier 2009, 21a.
c. La fonction n’est définie que pour x ≥ 0. De plus, Nous avons que
limx→0
√x + 1x
= ∞, (10.715)
donc cette fonction n’est pas continue en 0.
d. La fonction est définie sur toutR. Il faut maintenant regarder les deux pointsde discontinuité possibles. Le premier revient à calculer la limite
limx→0
x + 1x
sin(
x
x + 1
)
, (10.716)
qui est un cas du type sin(A)A
avec A qui tend vers zéro. Nous savons quecette limite vaut 1. Nous avons donc que limx→0 f(x) = 1, mais f(0) = 0. Lafonction n’est donc pas continue en 0.Pour le second point, nous devons calculer
limx→−1
x + 1x
sin(
x
x + 1
)
. (10.717)
Pour cette limite, nous utilisons la règle de l’étau. Le sinus reste bornéentre −1 et 1, tandis que le facteur x+1
xtend vers zéro. Nous avons donc
limx→−1 f(x) = 0 et donc la fonction est continue en −1.
e. Cette fonction est définie et continue sur tout R parce qu’elle est une com-posée de fonctions continues : la valeur absolue et l’exponentielle.
f. Cette fonction est définie tant que 1 + |x| > 0, ce qui est toujours le cas. Elleest également continue partout.
Correction de l’exercice janvier 2009, 23
a. Cette suite est la suite type qui tend vers zéro. En effet, prenons n’importequel ǫ > 0, et trouvons à partir de quel moment dans la suite, sn < ǫ.Nous cherchons dons les n pour lesquels 1
n< ǫ. Cette inéquation est facile à
résoudre : la réponse est
n >1ǫ. (10.718)
Prenons par exemple ǫ = 0.1. Effectivement, dès que n > 10, nous avonssn = 1
n< 0.1.

234 CHAPITRE 10. CORRECTIONS
b. Cette suite ressemble à une fonction, donc nous allons appliquer à peu prèsles mêmes recettes. D’abord nous mettons n en évidence au numérateur etau dénominateur et nous simplifions :
sn =2
3 − 2n
− 1/n
3 − 2n
. (10.719)
À ce moment nous appliquons le théorème qui dit que lim(an − bn) =lim(an) − lim(bn) (quand les limites existent). Ici,
an =2
3 − 2n
bn =1/n
3 − 2n
. (10.720)
En décomposant encore une fois chacun des deux termes en utilisant lethéorème qui dit que lim(an/bn) = lim an
lim bn, et en utilisant le fait que 1
n→ 0,
nous avons que le limite du tout vaut 23, comme nous nous y attendions
depuis le début.
c. Nous pouvons utiliser la technique de l’étau en écrivant que pour tout n,
− 1n
≤ (−1)n
n≤ 1
n. (10.721)
Les deux suites extrêmes tendent vers 0, donc celle du milieu tend vers zéro.
Correction de l’exercice janvier 2009, 24Affin de prouver la croissance, nous calculons sn+1 − sn, et nous prouvons que
cette différence est toujours positive. En mettant au même dénominateur et ensimplifiant, nous trouvons
sn+1 − sn =2(n + 1) − 73(n + 1) + 2
− 2n − 73n + 2
=25
9n2 + 21n + 1, (10.722)
qui est toujours positif quand n est positif. Note qu’ici, on ne considère que lesn > 0. Nous travaillons avec des suites, pas avec des fonctions ! Nous pouvonsprouver que cette suite est majorée de la façon suivante :
sn =2n − 73n + 2
<2n
3n + 2<
2n
3n=
23
. (10.723)
Les inégalités sont vraies parce que on ajoute 7 au numérateur et on enlève 2 audénominateur. La suite est donc majorée par 2
3.
Maintenant que nous savons que la suite est majorée et croissante, nous savonsqu’elle est convergente. Le calcul de la limite se fait de façon usuelle, et le résultatest 2
3.

235
Correction de l’exercice janvier 2009, 25Pour prouver que la suite est croissante, nous calculons sn
sn−1, et nous prouvons
que cette fraction est plus grande que 1 pour tout n. Nous avons
sn
sn−1=
√3sn−1
sn−1=
√3
√sn−1
. (10.724)
Pour que cela soit plus grand que 1, il faut d’abord s’assurer que sn−1 < 3. Celase fait par récurrence. En effet, si sk < 3, alors
sk+1 =√
3sk <√
3 · 3 = 3. (10.725)
Nous avons donc bien que tous les éléments de la suite sont plus petits que 3, etdonc que la suite est croissante et bornée.
La borne se trouve en utilisant l’astuce suivante. Nous savons que pour tout n,
sn+1 =√
3sn. (10.726)
Si nous notons l = lim sn, et si nous prenons la limite des deux côtés de (10.726),nous trouvons
l =√
3l, (10.727)
dont la solution est l = 3.
Correction de l’exercice janvier 2009, 26
a. Étant donner que multiplier une suite par un nombre constant ou l’addition-ner à un nombre constant ne change par le fait qu’elle soit bornée ou non,la suite sn = 2 − n−1
10sera bornée si et seulement si n−1
10est bornée, ce qui
arrivera si et seulement si n − 1 est bornée. Or on sait bien que la suite n − 1n’est pas bornée.Comme la suite n’est pas bornée, elle ne peut pas être convergente. Étudionsla (dé)croissance en calculant la différence entre deux termes consécutifs :
sn+1 − sn = 2 − (n + 1) − 110
−(
2 − n − 110
)
= − 110
. (10.728)
La différence étant négative, la suite est décroissante.
b. La convergence de cette suite se règle par l’étau :
− 1n + 1
<(−1)n−1
n + 1<
1n + 1
. (10.729)
La suite proposée converge donc vers zéro.

236 CHAPITRE 10. CORRECTIONS
c. Cette suite n’est ni croissante ni décroissante (parce qu’elle est positive etnégative un élément sur deux). Elle ne converge pas non plus parce qu’ellen’est pas bornée.
Correction de l’exercice janvier 2009, 27
a. Cette suite a pour formule de récurrence s1 =√
2 et sn+1 =√
2sn. Saconvergence se traite exactement comme ce qui a été fait pour l’exercicejanvier 2009, 25.
b. La formule qui donne la suite est s1 = 0.2 et sn+1 = sn + 310n .

237
(a) x 7→ x2 + 1 (b) x 7→ x3 (c) x 7→ tan x (d) x 7→ log2
x
(e) x 7→ |ln x| (f) x 7→ ln |x| (g) x 7→ sin x + 1
(h) x 7→ sin 2πx (i) x 7→ exp −x
Figure 10.10 – Correction figures. Attention : tous les graphes ne sont pas à lamême échelle.

238 CHAPITRE 10. CORRECTIONS
bc
ba
b
b
Figure 10.11 – Illustration du théorème des acroissements finis.
1
2
3
4
1 2 3 4 5 6 7−1−2−3−4−5−6−7
Figure 10.12 – La fonction de l’exercice TP3.4

239
1
1 2 3 4−1−2−3−4
Figure 10.13 – La fonction de l’exercice TP3.5.
Figure 10.14 – La fonction de l’exercice TP4.1
5
10
10 20 30 40 50
Figure 10.15 – Tracé de la fonction pour l’exercie janvier 2009, 18b.

240 CHAPITRE 10. CORRECTIONS

Chapitre 11
GNU Free DocumentationLicense
Version 1.3, 3 November 2008Copyright © 2000, 2001, 2002, 2007, 2008 Free Software Foundation, Inc.
http ://fsf.org/
Everyone is permitted to copy and distribute verbatim copies of this licensedocument, but changing it is not allowed.
11.1 Preamble
The purpose of this License is to make a manual, textbook, or other functionaland useful document “free” in the sense of freedom : to assure everyone the ef-fective freedom to copy and redistribute it, with or without modifying it, eithercommercially or noncommercially. Secondarily, this License preserves for the au-thor and publisher a way to get credit for their work, while not being consideredresponsible for modifications made by others.
This License is a kind of “copyleft”, which means that derivative works of thedocument must themselves be free in the same sense. It complements the GNUGeneral Public License, which is a copyleft license designed for free software.
We have designed this License in order to use it for manuals for free software,because free software needs free documentation : a free program should come withmanuals providing the same freedoms that the software does. But this License isnot limited to software manuals ; it can be used for any textual work, regardless ofsubject matter or whether it is published as a printed book. We recommend thisLicense principally for works whose purpose is instruction or reference.
241

242 CHAPITRE 11. GNU FREE DOCUMENTATION LICENSE
11.2 APPLICABILITY AND DEFINITIONS
This License applies to any manual or other work, in any medium, that containsa notice placed by the copyright holder saying it can be distributed under the termsof this License. Such a notice grants a world-wide, royalty-free license, unlimited induration, to use that work under the conditions stated herein. The “Document”,below, refers to any such manual or work. Any member of the public is a licensee,and is addressed as “you”. You accept the license if you copy, modify or distributethe work in a way requiring permission under copyright law.
A “Modified Version” of the Document means any work containing the Doc-ument or a portion of it, either copied verbatim, or with modifications and/ortranslated into another language.
A “Secondary Section” is a named appendix or a front-matter section of theDocument that deals exclusively with the relationship of the publishers or authorsof the Document to the Document’s overall subject (or to related matters) andcontains nothing that could fall directly within that overall subject. (Thus, if theDocument is in part a textbook of mathematics, a Secondary Section may not ex-plain any mathematics.) The relationship could be a matter of historical connectionwith the subject or with related matters, or of legal, commercial, philosophical,ethical or political position regarding them.
The “Invariant Sections” are certain Secondary Sections whose titles aredesignated, as being those of Invariant Sections, in the notice that says that theDocument is released under this License. If a section does not fit the above def-inition of Secondary then it is not allowed to be designated as Invariant. TheDocument may contain zero Invariant Sections. If the Document does not identifyany Invariant Sections then there are none.
The “Cover Texts” are certain short passages of text that are listed, as Front-Cover Texts or Back-Cover Texts, in the notice that says that the Document isreleased under this License. A Front-Cover Text may be at most 5 words, and aBack-Cover Text may be at most 25 words.
A “Transparent” copy of the Document means a machine-readable copy, rep-resented in a format whose specification is available to the general public, thatis suitable for revising the document straightforwardly with generic text editorsor (for images composed of pixels) generic paint programs or (for drawings) somewidely available drawing editor, and that is suitable for input to text formattersor for automatic translation to a variety of formats suitable for input to text for-matters. A copy made in an otherwise Transparent file format whose markup, orabsence of markup, has been arranged to thwart or discourage subsequent modifi-cation by readers is not Transparent. An image format is not Transparent if usedfor any substantial amount of text. A copy that is not “Transparent” is called“Opaque”.

11.3. VERBATIM COPYING 243
Examples of suitable formats for Transparent copies include plain ASCII with-out markup, Texinfo input format, LaTeX input format, SGML or XML usinga publicly available DTD, and standard-conforming simple HTML, PostScript orPDF designed for human modification. Examples of transparent image formats in-clude PNG, XCF and JPG. Opaque formats include proprietary formats that canbe read and edited only by proprietary word processors, SGML or XML for whichthe DTD and/or processing tools are not generally available, and the machine-generated HTML, PostScript or PDF produced by some word processors for outputpurposes only.
The “Title Page” means, for a printed book, the title page itself, plus suchfollowing pages as are needed to hold, legibly, the material this License requiresto appear in the title page. For works in formats which do not have any title pageas such, “Title Page” means the text near the most prominent appearance of thework’s title, preceding the beginning of the body of the text.
The “publisher” means any person or entity that distributes copies of theDocument to the public.
A section “Entitled XYZ” means a named subunit of the Document whose ti-tle either is precisely XYZ or contains XYZ in parentheses following text that trans-lates XYZ in another language. (Here XYZ stands for a specific section name men-tioned below, such as “Acknowledgements”, “Dedications”, “Endorsements”,or “History”.) To “Preserve the Title” of such a section when you modify theDocument means that it remains a section “Entitled XYZ” according to this defi-nition.
The Document may include Warranty Disclaimers next to the notice whichstates that this License applies to the Document. These Warranty Disclaimersare considered to be included by reference in this License, but only as regardsdisclaiming warranties : any other implication that these Warranty Disclaimersmay have is void and has no effect on the meaning of this License.
11.3 VERBATIM COPYING
You may copy and distribute the Document in any medium, either commer-cially or noncommercially, provided that this License, the copyright notices, andthe license notice saying this License applies to the Document are reproduced inall copies, and that you add no other conditions whatsoever to those of this Li-cense. You may not use technical measures to obstruct or control the reading orfurther copying of the copies you make or distribute. However, you may acceptcompensation in exchange for copies. If you distribute a large enough number ofcopies you must also follow the conditions in section 3.
You may also lend copies, under the same conditions stated above, and you

244 CHAPITRE 11. GNU FREE DOCUMENTATION LICENSE
may publicly display copies.
11.4 COPYING IN QUANTITY
If you publish printed copies (or copies in media that commonly have printedcovers) of the Document, numbering more than 100, and the Document’s licensenotice requires Cover Texts, you must enclose the copies in covers that carry,clearly and legibly, all these Cover Texts : Front-Cover Texts on the front cover,and Back-Cover Texts on the back cover. Both covers must also clearly and legiblyidentify you as the publisher of these copies. The front cover must present the fulltitle with all words of the title equally prominent and visible. You may add othermaterial on the covers in addition. Copying with changes limited to the covers, aslong as they preserve the title of the Document and satisfy these conditions, canbe treated as verbatim copying in other respects.
If the required texts for either cover are too voluminous to fit legibly, youshould put the first ones listed (as many as fit reasonably) on the actual cover,and continue the rest onto adjacent pages.
If you publish or distribute Opaque copies of the Document numbering morethan 100, you must either include a machine-readable Transparent copy alongwith each Opaque copy, or state in or with each Opaque copy a computer-networklocation from which the general network-using public has access to download usingpublic-standard network protocols a complete Transparent copy of the Document,free of added material. If you use the latter option, you must take reasonablyprudent steps, when you begin distribution of Opaque copies in quantity, to ensurethat this Transparent copy will remain thus accessible at the stated location untilat least one year after the last time you distribute an Opaque copy (directly orthrough your agents or retailers) of that edition to the public.
It is requested, but not required, that you contact the authors of the Documentwell before redistributing any large number of copies, to give them a chance toprovide you with an updated version of the Document.
11.5 MODIFICATIONS
You may copy and distribute a Modified Version of the Document under theconditions of sections 2 and 3 above, provided that you release the Modified Ver-sion under precisely this License, with the Modified Version filling the role of theDocument, thus licensing distribution and modification of the Modified Versionto whoever possesses a copy of it. In addition, you must do these things in theModified Version :

11.5. MODIFICATIONS 245
A. Use in the Title Page (and on the covers, if any) a title distinct from thatof the Document, and from those of previous versions (which should, if therewere any, be listed in the History section of the Document). You may usethe same title as a previous version if the original publisher of that versiongives permission.
B. List on the Title Page, as authors, one or more persons or entities respon-sible for authorship of the modifications in the Modified Version, togetherwith at least five of the principal authors of the Document (all of its prin-cipal authors, if it has fewer than five), unless they release you from thisrequirement.
C. State on the Title page the name of the publisher of the Modified Version,as the publisher.
D. Preserve all the copyright notices of the Document.E. Add an appropriate copyright notice for your modifications adjacent to the
other copyright notices.F. Include, immediately after the copyright notices, a license notice giving the
public permission to use the Modified Version under the terms of this License,in the form shown in the Addendum below.
G. Preserve in that license notice the full lists of Invariant Sections and requiredCover Texts given in the Document’s license notice.
H. Include an unaltered copy of this License.I. Preserve the section Entitled “History”, Preserve its Title, and add to it
an item stating at least the title, year, new authors, and publisher of theModified Version as given on the Title Page. If there is no section Entitled“History” in the Document, create one stating the title, year, authors, andpublisher of the Document as given on its Title Page, then add an itemdescribing the Modified Version as stated in the previous sentence.
J. Preserve the network location, if any, given in the Document for publicaccess to a Transparent copy of the Document, and likewise the networklocations given in the Document for previous versions it was based on. Thesemay be placed in the “History” section. You may omit a network locationfor a work that was published at least four years before the Document itself,or if the original publisher of the version it refers to gives permission.
K. For any section Entitled “Acknowledgements” or “Dedications”, Preservethe Title of the section, and preserve in the section all the substance andtone of each of the contributor acknowledgements and/or dedications giventherein.
L. Preserve all the Invariant Sections of the Document, unaltered in their textand in their titles. Section numbers or the equivalent are not considered partof the section titles.

246 CHAPITRE 11. GNU FREE DOCUMENTATION LICENSE
M. Delete any section Entitled “Endorsements”. Such a section may not beincluded in the Modified Version.
N. Do not retitle any existing section to be Entitled “Endorsements” or toconflict in title with any Invariant Section.
O. Preserve any Warranty Disclaimers.If the Modified Version includes new front-matter sections or appendices that
qualify as Secondary Sections and contain no material copied from the Document,you may at your option designate some or all of these sections as invariant. Todo this, add their titles to the list of Invariant Sections in the Modified Version’slicense notice. These titles must be distinct from any other section titles.
You may add a section Entitled “Endorsements”, provided it contains nothingbut endorsements of your Modified Version by various parties—for example, state-ments of peer review or that the text has been approved by an organization as theauthoritative definition of a standard.
You may add a passage of up to five words as a Front-Cover Text, and a passageof up to 25 words as a Back-Cover Text, to the end of the list of Cover Texts in theModified Version. Only one passage of Front-Cover Text and one of Back-CoverText may be added by (or through arrangements made by) any one entity. If theDocument already includes a cover text for the same cover, previously added byyou or by arrangement made by the same entity you are acting on behalf of, youmay not add another ; but you may replace the old one, on explicit permissionfrom the previous publisher that added the old one.
The author(s) and publisher(s) of the Document do not by this License givepermission to use their names for publicity for or to assert or imply endorsementof any Modified Version.
11.6 COMBINING DOCUMENTS
You may combine the Document with other documents released under thisLicense, under the terms defined in section 4 above for modified versions, providedthat you include in the combination all of the Invariant Sections of all of the originaldocuments, unmodified, and list them all as Invariant Sections of your combinedwork in its license notice, and that you preserve all their Warranty Disclaimers.
The combined work need only contain one copy of this License, and multipleidentical Invariant Sections may be replaced with a single copy. If there are multipleInvariant Sections with the same name but different contents, make the title ofeach such section unique by adding at the end of it, in parentheses, the name ofthe original author or publisher of that section if known, or else a unique number.Make the same adjustment to the section titles in the list of Invariant Sections inthe license notice of the combined work.

11.7. COLLECTIONS OF DOCUMENTS 247
In the combination, you must combine any sections Entitled “History” in thevarious original documents, forming one section Entitled “History” ; likewise com-bine any sections Entitled “Acknowledgements”, and any sections Entitled “Dedi-cations”. You must delete all sections Entitled “Endorsements”.
11.7 COLLECTIONS OF DOCUMENTS
You may make a collection consisting of the Document and other documentsreleased under this License, and replace the individual copies of this License inthe various documents with a single copy that is included in the collection, pro-vided that you follow the rules of this License for verbatim copying of each of thedocuments in all other respects.
You may extract a single document from such a collection, and distribute itindividually under this License, provided you insert a copy of this License intothe extracted document, and follow this License in all other respects regardingverbatim copying of that document.
11.8 AGGREGATION WITH INDEPENDENTWORKS
A compilation of the Document or its derivatives with other separate and in-dependent documents or works, in or on a volume of a storage or distributionmedium, is called an “aggregate” if the copyright resulting from the compilationis not used to limit the legal rights of the compilation’s users beyond what theindividual works permit. When the Document is included in an aggregate, this Li-cense does not apply to the other works in the aggregate which are not themselvesderivative works of the Document.
If the Cover Text requirement of section 3 is applicable to these copies of theDocument, then if the Document is less than one half of the entire aggregate,the Document’s Cover Texts may be placed on covers that bracket the Documentwithin the aggregate, or the electronic equivalent of covers if the Document is inelectronic form. Otherwise they must appear on printed covers that bracket thewhole aggregate.
11.9 TRANSLATION
Translation is considered a kind of modification, so you may distribute trans-lations of the Document under the terms of section 4. Replacing Invariant Sec-

248 CHAPITRE 11. GNU FREE DOCUMENTATION LICENSE
tions with translations requires special permission from their copyright holders,but you may include translations of some or all Invariant Sections in addition tothe original versions of these Invariant Sections. You may include a translationof this License, and all the license notices in the Document, and any WarrantyDisclaimers, provided that you also include the original English version of thisLicense and the original versions of those notices and disclaimers. In case of adisagreement between the translation and the original version of this License or anotice or disclaimer, the original version will prevail.
If a section in the Document is Entitled “Acknowledgements”, “Dedications”,or “History”, the requirement (section 4) to Preserve its Title (section 1) willtypically require changing the actual title.
11.10 TERMINATION
You may not copy, modify, sublicense, or distribute the Document except asexpressly provided under this License. Any attempt otherwise to copy, modify,sublicense, or distribute it is void, and will automatically terminate your rightsunder this License.
However, if you cease all violation of this License, then your license from a par-ticular copyright holder is reinstated (a) provisionally, unless and until the copy-right holder explicitly and finally terminates your license, and (b) permanently, ifthe copyright holder fails to notify you of the violation by some reasonable meansprior to 60 days after the cessation.
Moreover, your license from a particular copyright holder is reinstated per-manently if the copyright holder notifies you of the violation by some reasonablemeans, this is the first time you have received notice of violation of this License(for any work) from that copyright holder, and you cure the violation prior to 30days after your receipt of the notice.
Termination of your rights under this section does not terminate the licensesof parties who have received copies or rights from you under this License. If yourrights have been terminated and not permanently reinstated, receipt of a copy ofsome or all of the same material does not give you any rights to use it.
11.11 FUTURE REVISIONS OF THIS LICENSE
The Free Software Foundation may publish new, revised versions of the GNUFree Documentation License from time to time. Such new versions will be similarin spirit to the present version, but may differ in detail to address new problemsor concerns. See http ://www.gnu.org/copyleft/ .

11.12. RELICENSING 249
Each version of the License is given a distinguishing version number. If theDocument specifies that a particular numbered version of this License “or any laterversion” applies to it, you have the option of following the terms and conditionseither of that specified version or of any later version that has been published (notas a draft) by the Free Software Foundation. If the Document does not specify aversion number of this License, you may choose any version ever published (not asa draft) by the Free Software Foundation. If the Document specifies that a proxycan decide which future versions of this License can be used, that proxy’s publicstatement of acceptance of a version permanently authorizes you to choose thatversion for the Document.
11.12 RELICENSING
“Massive Multiauthor Collaboration Site” (or “MMC Site”) means any WorldWide Web server that publishes copyrightable works and also provides prominentfacilities for anybody to edit those works. A public wiki that anybody can edit isan example of such a server. A “Massive Multiauthor Collaboration” (or “MMC”)contained in the site means any set of copyrightable works thus published on theMMC site.
“CC-BY-SA” means the Creative Commons Attribution-Share Alike 3.0 licensepublished by Creative Commons Corporation, a not-for-profit corporation with aprincipal place of business in San Francisco, California, as well as future copyleftversions of that license published by that same organization.
“Incorporate” means to publish or republish a Document, in whole or in part,as part of another Document.
An MMC is “eligible for relicensing” if it is licensed under this License, andif all works that were first published under this License somewhere other thanthis MMC, and subsequently incorporated in whole or in part into the MMC, (1)had no cover texts or invariant sections, and (2) were thus incorporated prior toNovember 1, 2008.
The operator of an MMC Site may republish an MMC contained in the siteunder CC-BY-SA on the same site at any time before August 1, 2009, providedthe MMC is eligible for relicensing.
11.13 ADDENDUM : How to use this Licensefor your documents
To use this License in a document you have written, include a copy of theLicense in the document and put the following copyright and license notices just

250 CHAPITRE 11. GNU FREE DOCUMENTATION LICENSE
after the title page :
Copyright © YEAR YOUR NAME. Permission is granted to copy,distribute and/or modify this document under the terms of the GNUFree Documentation License, Version 1.3 or any later version publishedby the Free Software Foundation ; with no Invariant Sections, no Front-Cover Texts, and no Back-Cover Texts. A copy of the license is includedin the section entitled “GNU Free Documentation License”.
If you have Invariant Sections, Front-Cover Texts and Back-Cover Texts, re-place the “with . . . Texts.” line with this :
with the Invariant Sections being LIST THEIR TITLES, with theFront-Cover Texts being LIST, and with the Back-Cover Texts beingLIST.
If you have Invariant Sections without Cover Texts, or some other combinationof the three, merge those two alternatives to suit the situation.
If your document contains nontrivial examples of program code, we recommendreleasing these examples in parallel under your choice of free software license, suchas the GNU General Public License, to permit their use in free software.

Bibliographie
[1] W. A. Stein et al. Sage Mathematics Software (Version 4.3.3). The SageDevelopment Team, 2009.http://www.sagemath.org.
[2] Laurent Claessens, Nicolas Richard, and Yvik Swan. Exercices et corrigés decalcul différentiel et intégral 1. 2009. Pour l’université libre de Bruxelles.http://student.ulb.ac.be/~lclaesse/CdI1.pdf.
251