Corrigé d'un exercice sur la matrice de rotation dans le plan · Où l’on découvre et prouve...
60
Corrigé d’un exercice sur la matrice de rotation dans le plan Denis Bitouzé IUT Génie Thermique et Énergie de Dunkerque 7 mai 2020
Transcript of Corrigé d'un exercice sur la matrice de rotation dans le plan · Où l’on découvre et prouve...

Corrigé d’un exercice sur la matrice derotation dans le plan
Denis Bitouzé
IUT Génie Thermique et Énergie de Dunkerque
7 mai 2020

Plan
Énoncé de l’exercice
Où l’on découvre en quoi la matrice de rotation est unematrice de rotation
Où l’on découvre et prouve que faire subir à un vecteur n foisune rotation d’angle α revient à lui faire subir une rotationd’angle nα

Plan
Énoncé de l’exercice
Où l’on découvre en quoi la matrice de rotation est unematrice de rotation
Où l’on découvre et prouve que faire subir à un vecteur n foisune rotation d’angle α revient à lui faire subir une rotationd’angle nα

Énoncé de l’exercice
Soit α un réel et Rα la matrice rotation définie par :
Rα =
(cosα −sinαsinα cosα
)
1. Calculer R2α et R3
α .
2. En déduire une formule pour Rnα (n ∈N∗) à démontrer par
récurrence.

Énoncé de l’exercice
Soit α un réel et Rα la matrice rotation définie par :
Rα =
(cosα −sinαsinα cosα
)
1. Calculer R2α et R3
α .
2. En déduire une formule pour Rnα (n ∈N∗) à démontrer par
récurrence.

Plan
Énoncé de l’exercice
Où l’on découvre en quoi la matrice de rotation est unematrice de rotation
Où l’on découvre et prouve que faire subir à un vecteur n foisune rotation d’angle α revient à lui faire subir une rotationd’angle nα

Matrice de rotation
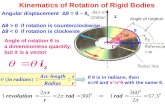
#»v ′ =# »
OM ′ vecteur obtenu par rotation de centre O et d’angle α du vecteur# »OM
x
y
O
a
b M
#»v
a ′
b ′ M ′
α
#»v ′
γ
β
#»v =# »OM =
(ab
)#»v ′ =
# »
OM ′ =(a′b ′
)=
(OM ′ cosγOM ′ sinγ
)=OM ′
(cosγsinγ
)=OM ′
(cos(α+ β)sin(α+ β)
)=OM ′
(cosα cosβ − sinα sinβsinα cosβ+cosα sinβ
)=OM ′
(cosα −sinαsinα cosα
)(cosβsinβ
)=OM
(cosα −sinαsinα cosα
)(cosβsinβ
)=
(cosα −sinαsinα cosα
)(OM cosβOM sinβ
)=
(cosα −sinαsinα cosα
)(ab
)=
(cosα −sinαsinα cosα
)#»v
= Rα#»v

Matrice de rotation
#»v ′ =# »
OM ′ vecteur obtenu par rotation de centre O et d’angle α du vecteur# »OM
x
y
O a
b M
#»v
a ′
b ′ M ′
α
#»v ′
γ
β
#»v =# »OM =
(ab
)
#»v ′ =# »
OM ′ =(a′b ′
)=
(OM ′ cosγOM ′ sinγ
)=OM ′
(cosγsinγ
)=OM ′
(cos(α+ β)sin(α+ β)
)=OM ′
(cosα cosβ − sinα sinβsinα cosβ+cosα sinβ
)=OM ′
(cosα −sinαsinα cosα
)(cosβsinβ
)=OM
(cosα −sinαsinα cosα
)(cosβsinβ
)=
(cosα −sinαsinα cosα
)(OM cosβOM sinβ
)=
(cosα −sinαsinα cosα
)(ab
)=
(cosα −sinαsinα cosα
)#»v
= Rα#»v

Matrice de rotation#»v ′ =
# »
OM ′ vecteur obtenu par rotation de centre O et d’angle α du vecteur# »OM
x
y
O a
b M
#»v
a ′
b ′ M ′
α
#»v ′
γ
β
#»v =# »OM =
(ab
)#»v ′ =
# »
OM ′ =(a′b ′
)
=
(OM ′ cosγOM ′ sinγ
)=OM ′
(cosγsinγ
)=OM ′
(cos(α+ β)sin(α+ β)
)=OM ′
(cosα cosβ − sinα sinβsinα cosβ+cosα sinβ
)=OM ′
(cosα −sinαsinα cosα
)(cosβsinβ
)=OM
(cosα −sinαsinα cosα
)(cosβsinβ
)=
(cosα −sinαsinα cosα
)(OM cosβOM sinβ
)=
(cosα −sinαsinα cosα
)(ab
)=
(cosα −sinαsinα cosα
)#»v
= Rα#»v

Matrice de rotation#»v ′ =
# »
OM ′ vecteur obtenu par rotation de centre O et d’angle α du vecteur# »OM
x
y
O a
b M
#»v
a ′
b ′ M ′
α
#»v ′
γ
β
#»v =# »OM =
(ab
)#»v ′ =
# »
OM ′ =(a′b ′
)=
(OM ′ cosγOM ′ sinγ
)
=OM ′(cosγsinγ
)=OM ′
(cos(α+ β)sin(α+ β)
)=OM ′
(cosα cosβ − sinα sinβsinα cosβ+cosα sinβ
)=OM ′
(cosα −sinαsinα cosα
)(cosβsinβ
)=OM
(cosα −sinαsinα cosα
)(cosβsinβ
)=
(cosα −sinαsinα cosα
)(OM cosβOM sinβ
)=
(cosα −sinαsinα cosα
)(ab
)=
(cosα −sinαsinα cosα
)#»v
= Rα#»v

Matrice de rotation#»v ′ =
# »
OM ′ vecteur obtenu par rotation de centre O et d’angle α du vecteur# »OM
x
y
O a
b M
#»v
a ′
b ′ M ′
α
#»v ′
γ
β
#»v =# »OM =
(ab
)#»v ′ =
# »
OM ′ =(a′b ′
)=
(OM ′ cosγOM ′ sinγ
)=OM ′
(cosγsinγ
)
=OM ′(cos(α+ β)sin(α+ β)
)=OM ′
(cosα cosβ − sinα sinβsinα cosβ+cosα sinβ
)=OM ′
(cosα −sinαsinα cosα
)(cosβsinβ
)=OM
(cosα −sinαsinα cosα
)(cosβsinβ
)=
(cosα −sinαsinα cosα
)(OM cosβOM sinβ
)=
(cosα −sinαsinα cosα
)(ab
)=
(cosα −sinαsinα cosα
)#»v
= Rα#»v

Matrice de rotation#»v ′ =
# »
OM ′ vecteur obtenu par rotation de centre O et d’angle α du vecteur# »OM
x
y
O a
b M
#»v
a ′
b ′ M ′
α
#»v ′
γ
β
#»v =# »OM =
(ab
)#»v ′ =
# »
OM ′ =(a′b ′
)=
(OM ′ cosγOM ′ sinγ
)=OM ′
(cosγsinγ
)=OM ′
(cos(α+ β)sin(α+ β)
)
=OM ′(cosα cosβ − sinα sinβsinα cosβ+cosα sinβ
)=OM ′
(cosα −sinαsinα cosα
)(cosβsinβ
)=OM
(cosα −sinαsinα cosα
)(cosβsinβ
)=
(cosα −sinαsinα cosα
)(OM cosβOM sinβ
)=
(cosα −sinαsinα cosα
)(ab
)=
(cosα −sinαsinα cosα
)#»v
= Rα#»v

Matrice de rotation#»v ′ =
# »
OM ′ vecteur obtenu par rotation de centre O et d’angle α du vecteur# »OM
x
y
O a
b M
#»v
a ′
b ′ M ′
α
#»v ′
γ
β
#»v =# »OM =
(ab
)#»v ′ =
# »
OM ′ =(a′b ′
)=
(OM ′ cosγOM ′ sinγ
)=OM ′
(cosγsinγ
)=OM ′
(cos(α+ β)sin(α+ β)
)=OM ′
(cosα cosβ − sinα sinβsinα cosβ+cosα sinβ
)
=OM ′(cosα −sinαsinα cosα
)(cosβsinβ
)=OM
(cosα −sinαsinα cosα
)(cosβsinβ
)=
(cosα −sinαsinα cosα
)(OM cosβOM sinβ
)=
(cosα −sinαsinα cosα
)(ab
)=
(cosα −sinαsinα cosα
)#»v
= Rα#»v

Matrice de rotation#»v ′ =
# »
OM ′ vecteur obtenu par rotation de centre O et d’angle α du vecteur# »OM
x
y
O a
b M
#»v
a ′
b ′ M ′
α
#»v ′
γ
β
#»v =# »OM =
(ab
)#»v ′ =
# »
OM ′ =(a′b ′
)=
(OM ′ cosγOM ′ sinγ
)=OM ′
(cosγsinγ
)=OM ′
(cos(α+ β)sin(α+ β)
)=OM ′
(cosα cosβ − sinα sinβsinα cosβ+cosα sinβ
)=OM ′
(cosα −sinαsinα cosα
)(cosβsinβ
)
=OM
(cosα −sinαsinα cosα
)(cosβsinβ
)=
(cosα −sinαsinα cosα
)(OM cosβOM sinβ
)=
(cosα −sinαsinα cosα
)(ab
)=
(cosα −sinαsinα cosα
)#»v
= Rα#»v

Matrice de rotation#»v ′ =
# »
OM ′ vecteur obtenu par rotation de centre O et d’angle α du vecteur# »OM
x
y
O a
b M
#»v
a ′
b ′ M ′
α
#»v ′
γ
β
#»v =# »OM =
(ab
)#»v ′ =
# »
OM ′ =(a′b ′
)=
(OM ′ cosγOM ′ sinγ
)=OM ′
(cosγsinγ
)=OM ′
(cos(α+ β)sin(α+ β)
)=OM ′
(cosα cosβ − sinα sinβsinα cosβ+cosα sinβ
)=OM ′
(cosα −sinαsinα cosα
)(cosβsinβ
)=OM
(cosα −sinαsinα cosα
)(cosβsinβ
)
=
(cosα −sinαsinα cosα
)(OM cosβOM sinβ
)=
(cosα −sinαsinα cosα
)(ab
)=
(cosα −sinαsinα cosα
)#»v
= Rα#»v

Matrice de rotation#»v ′ =
# »
OM ′ vecteur obtenu par rotation de centre O et d’angle α du vecteur# »OM
x
y
O a
b M
#»v
a ′
b ′ M ′
α
#»v ′
γ
β
#»v =# »OM =
(ab
)#»v ′ =
# »
OM ′ =(a′b ′
)=
(OM ′ cosγOM ′ sinγ
)=OM ′
(cosγsinγ
)=OM ′
(cos(α+ β)sin(α+ β)
)=OM ′
(cosα cosβ − sinα sinβsinα cosβ+cosα sinβ
)=OM ′
(cosα −sinαsinα cosα
)(cosβsinβ
)=OM
(cosα −sinαsinα cosα
)(cosβsinβ
)=
(cosα −sinαsinα cosα
)(OM cosβOM sinβ
)
=
(cosα −sinαsinα cosα
)(ab
)=
(cosα −sinαsinα cosα
)#»v
= Rα#»v

Matrice de rotation#»v ′ =
# »
OM ′ vecteur obtenu par rotation de centre O et d’angle α du vecteur# »OM
x
y
O a
b M
#»v
a ′
b ′ M ′
α
#»v ′
γ
β
#»v =# »OM =
(ab
)#»v ′ =
# »
OM ′ =(a′b ′
)=
(OM ′ cosγOM ′ sinγ
)=OM ′
(cosγsinγ
)=OM ′
(cos(α+ β)sin(α+ β)
)=OM ′
(cosα cosβ − sinα sinβsinα cosβ+cosα sinβ
)=OM ′
(cosα −sinαsinα cosα
)(cosβsinβ
)=OM
(cosα −sinαsinα cosα
)(cosβsinβ
)=
(cosα −sinαsinα cosα
)(OM cosβOM sinβ
)=
(cosα −sinαsinα cosα
)(ab
)
=
(cosα −sinαsinα cosα
)#»v
= Rα#»v

Matrice de rotation#»v ′ =
# »
OM ′ vecteur obtenu par rotation de centre O et d’angle α du vecteur# »OM
x
y
O a
b M
#»v
a ′
b ′ M ′
α
#»v ′
γ
β
#»v =# »OM =
(ab
)#»v ′ =
# »
OM ′ =(a′b ′
)=
(OM ′ cosγOM ′ sinγ
)=OM ′
(cosγsinγ
)=OM ′
(cos(α+ β)sin(α+ β)
)=OM ′
(cosα cosβ − sinα sinβsinα cosβ+cosα sinβ
)=OM ′
(cosα −sinαsinα cosα
)(cosβsinβ
)=OM
(cosα −sinαsinα cosα
)(cosβsinβ
)=
(cosα −sinαsinα cosα
)(OM cosβOM sinβ
)=
(cosα −sinαsinα cosα
)(ab
)=
(cosα −sinαsinα cosα
)#»v
= Rα#»v

Matrice de rotation#»v ′ =
# »
OM ′ vecteur obtenu par rotation de centre O et d’angle α du vecteur# »OM
x
y
O a
b M
#»v
a ′
b ′ M ′
α
#»v ′
γ
β
#»v =# »OM =
(ab
)#»v ′ =
# »
OM ′ =(a′b ′
)=
(OM ′ cosγOM ′ sinγ
)=OM ′
(cosγsinγ
)=OM ′
(cos(α+ β)sin(α+ β)
)=OM ′
(cosα cosβ − sinα sinβsinα cosβ+cosα sinβ
)=OM ′
(cosα −sinαsinα cosα
)(cosβsinβ
)=OM
(cosα −sinαsinα cosα
)(cosβsinβ
)=
(cosα −sinαsinα cosα
)(OM cosβOM sinβ
)=
(cosα −sinαsinα cosα
)(ab
)=
(cosα −sinαsinα cosα
)#»v
= Rα#»v

Plan
Énoncé de l’exercice
Où l’on découvre en quoi la matrice de rotation est unematrice de rotation
Où l’on découvre et prouve que faire subir à un vecteur n foisune rotation d’angle α revient à lui faire subir une rotationd’angle nα

Calcul de R2α
R2α = RαRα
=
(cosα −sinαsinα cosα
)(cosα −sinαsinα cosα
)=
(cos2α − sin2α −2cosα sinα
2cosα sinα cos2α − sin2α
)=
(cos2α −sin2αsin2α cos2α
)= R2α

Calcul de R2α
R2α = RαRα
=
(cosα −sinαsinα cosα
)(cosα −sinαsinα cosα
)
=
(cos2α − sin2α −2cosα sinα
2cosα sinα cos2α − sin2α
)=
(cos2α −sin2αsin2α cos2α
)= R2α

Calcul de R2α
R2α = RαRα
=
(cosα −sinαsinα cosα
)(cosα −sinαsinα cosα
)=
(cos2α − sin2α −2cosα sinα
2cosα sinα cos2α − sin2α
)
=
(cos2α −sin2αsin2α cos2α
)= R2α

Calcul de R2α
R2α = RαRα
=
(cosα −sinαsinα cosα
)(cosα −sinαsinα cosα
)=
(cos2α − sin2α −2cosα sinα
2cosα sinα cos2α − sin2α
)=
(cos2α −sin2αsin2α cos2α
)
= R2α

Calcul de R2α
R2α = RαRα
=
(cosα −sinαsinα cosα
)(cosα −sinαsinα cosα
)=
(cos2α − sin2α −2cosα sinα
2cosα sinα cos2α − sin2α
)=
(cos2α −sin2αsin2α cos2α
)= R2α

Calcul de R2α (remarque)
Faire subir à un vecteur #»v 2 fois une rotation d’angle α revientà Rα (Rα
#»v ).
Or :
Rα (Rα#»v ) = (RαRα)
#»v (associativité du produit matriciel)
= R2α
#»v
= R2α#»v (d’après le calcul précédent)
Autrement dit, faire subir à un vecteur 2 fois une rotationd’angle α revient à lui faire subir une rotation d’angle 2α.

Calcul de R2α (remarque)
Faire subir à un vecteur #»v 2 fois une rotation d’angle α revientà Rα (Rα
#»v ). Or :
Rα (Rα#»v ) = (RαRα)
#»v (associativité du produit matriciel)
= R2α
#»v
= R2α#»v (d’après le calcul précédent)
Autrement dit, faire subir à un vecteur 2 fois une rotationd’angle α revient à lui faire subir une rotation d’angle 2α.

Calcul de R2α (remarque)
Faire subir à un vecteur #»v 2 fois une rotation d’angle α revientà Rα (Rα
#»v ). Or :
Rα (Rα#»v ) = (RαRα)
#»v (associativité du produit matriciel)
= R2α
#»v
= R2α#»v (d’après le calcul précédent)
Autrement dit, faire subir à un vecteur 2 fois une rotationd’angle α revient à lui faire subir une rotation d’angle 2α.

Calcul de R2α (remarque)
Faire subir à un vecteur #»v 2 fois une rotation d’angle α revientà Rα (Rα
#»v ). Or :
Rα (Rα#»v ) = (RαRα)
#»v (associativité du produit matriciel)
= R2α
#»v
= R2α#»v (d’après le calcul précédent)
Autrement dit, faire subir à un vecteur 2 fois une rotationd’angle α revient à lui faire subir une rotation d’angle 2α.

Calcul de R2α (remarque)
Faire subir à un vecteur #»v 2 fois une rotation d’angle α revientà Rα (Rα
#»v ). Or :
Rα (Rα#»v ) = (RαRα)
#»v (associativité du produit matriciel)
= R2α
#»v
= R2α#»v (d’après le calcul précédent)
Autrement dit, faire subir à un vecteur 2 fois une rotationd’angle α revient à lui faire subir une rotation d’angle 2α.

Calcul de R3α
R3α = R2
αRα
= R2αRα d’après le transparent précédent
=
(cos2α −sin2αsin2α cos2α
)(cosα −sinαsinα cosα
)=
(cos2α cosα − sin2α sinα −cos2α sinα − cosα sin2αsin2α cosα+cos2α sinα −sin2α sinα+cos2α cosα
)=
(cos3α −sin3αsin3α cos3α
)= R3α
Donc, de même, faire subir à un vecteur 3 fois une rotationd’angle α revient à lui faire subir une rotation d’angle 3α.

Calcul de R3α
R3α = R2
αRα= R2αRα d’après le transparent précédent
=
(cos2α −sin2αsin2α cos2α
)(cosα −sinαsinα cosα
)=
(cos2α cosα − sin2α sinα −cos2α sinα − cosα sin2αsin2α cosα+cos2α sinα −sin2α sinα+cos2α cosα
)=
(cos3α −sin3αsin3α cos3α
)= R3α
Donc, de même, faire subir à un vecteur 3 fois une rotationd’angle α revient à lui faire subir une rotation d’angle 3α.

Calcul de R3α
R3α = R2
αRα= R2αRα d’après le transparent précédent
=
(cos2α −sin2αsin2α cos2α
)(cosα −sinαsinα cosα
)
=
(cos2α cosα − sin2α sinα −cos2α sinα − cosα sin2αsin2α cosα+cos2α sinα −sin2α sinα+cos2α cosα
)=
(cos3α −sin3αsin3α cos3α
)= R3α
Donc, de même, faire subir à un vecteur 3 fois une rotationd’angle α revient à lui faire subir une rotation d’angle 3α.

Calcul de R3α
R3α = R2
αRα= R2αRα d’après le transparent précédent
=
(cos2α −sin2αsin2α cos2α
)(cosα −sinαsinα cosα
)=
(cos2α cosα − sin2α sinα −cos2α sinα − cosα sin2αsin2α cosα+cos2α sinα −sin2α sinα+cos2α cosα
)
=
(cos3α −sin3αsin3α cos3α
)= R3α
Donc, de même, faire subir à un vecteur 3 fois une rotationd’angle α revient à lui faire subir une rotation d’angle 3α.

Calcul de R3α
R3α = R2
αRα= R2αRα d’après le transparent précédent
=
(cos2α −sin2αsin2α cos2α
)(cosα −sinαsinα cosα
)=
(cos2α cosα − sin2α sinα −cos2α sinα − cosα sin2αsin2α cosα+cos2α sinα −sin2α sinα+cos2α cosα
)=
(cos3α −sin3αsin3α cos3α
)
= R3α
Donc, de même, faire subir à un vecteur 3 fois une rotationd’angle α revient à lui faire subir une rotation d’angle 3α.

Calcul de R3α
R3α = R2
αRα= R2αRα d’après le transparent précédent
=
(cos2α −sin2αsin2α cos2α
)(cosα −sinαsinα cosα
)=
(cos2α cosα − sin2α sinα −cos2α sinα − cosα sin2αsin2α cosα+cos2α sinα −sin2α sinα+cos2α cosα
)=
(cos3α −sin3αsin3α cos3α
)= R3α
Donc, de même, faire subir à un vecteur 3 fois une rotationd’angle α revient à lui faire subir une rotation d’angle 3α.

Calcul de R3α
R3α = R2
αRα= R2αRα d’après le transparent précédent
=
(cos2α −sin2αsin2α cos2α
)(cosα −sinαsinα cosα
)=
(cos2α cosα − sin2α sinα −cos2α sinα − cosα sin2αsin2α cosα+cos2α sinα −sin2α sinα+cos2α cosα
)=
(cos3α −sin3αsin3α cos3α
)= R3α
Donc, de même, faire subir à un vecteur 3 fois une rotationd’angle α revient à lui faire subir une rotation d’angle 3α.

Conjecture
I On conjecture que, pour tout n > 1, on a Rnα = Rnα .
I Prouvons-le par récurrence.

Conjecture
I On conjecture que, pour tout n > 1, on a Rnα = Rnα .
I Prouvons-le par récurrence.

RécurrencePremière étape : initialisation
La relation Rnα = Rnα est bien vraie au rang n = 1. En effet :
R1α = Rα par définition de la puissance d’une matrice
= R1α

RécurrencePremière étape : initialisation
La relation Rnα = Rnα est bien vraie au rang n = 1.
En effet :
R1α = Rα par définition de la puissance d’une matrice
= R1α

RécurrencePremière étape : initialisation
La relation Rnα = Rnα est bien vraie au rang n = 1. En effet :
R1α = Rα par définition de la puissance d’une matrice
= R1α

RécurrencePremière étape : initialisation
La relation Rnα = Rnα est bien vraie au rang n = 1. En effet :
R1α = Rα par définition de la puissance d’une matrice
= R1α

RécurrenceDeuxième étape : hérédité (programme)
1. On suppose la relation vraie au rang n :
Rnα = Rnα (hypothèse de récurrence)
2. On prouve que, alors, la relation est vraie au rang n +1 :
Rn+1α = R(n+1)α

RécurrenceDeuxième étape : hérédité (programme)
1. On suppose la relation vraie au rang n :
Rnα = Rnα (hypothèse de récurrence)
2. On prouve que, alors, la relation est vraie au rang n +1
:
Rn+1α = R(n+1)α

RécurrenceDeuxième étape : hérédité (programme)
1. On suppose la relation vraie au rang n :
Rnα = Rnα (hypothèse de récurrence)
2. On prouve que, alors, la relation est vraie au rang n +1
:
Rn+1α = R(n+1)α

RécurrenceDeuxième étape : hérédité (programme)
1. On suppose la relation vraie au rang n :
Rnα = Rnα (hypothèse de récurrence)
2. On prouve que, alors, la relation est vraie au rang n +1 :
Rn+1α = R(n+1)α

RécurrenceDeuxième étape : hérédité (preuve que la relation est vraie au rang n +1)
On a :
Rn+1α = RαR
nα
= RαRnα par hypothèse de récurrence
=
(cosα −sinαsinα cosα
)(cosnα −sinnαsinnα cosnα
)=
(cosα cosnα − sinα sinnα −cosα sinnα − sinα cosnαsinα cosnα+cosα sinnα −sinα sinnα+cosα cosnα
)=
(cos(n +1)α −sin(n +1)αsin(n +1)α cos(n +1)α
)= R(n+1)α
La relation est bien vraie au rang n +1.

RécurrenceDeuxième étape : hérédité (preuve que la relation est vraie au rang n +1)
On a :
Rn+1α = RαR
nα
= RαRnα par hypothèse de récurrence
=
(cosα −sinαsinα cosα
)(cosnα −sinnαsinnα cosnα
)=
(cosα cosnα − sinα sinnα −cosα sinnα − sinα cosnαsinα cosnα+cosα sinnα −sinα sinnα+cosα cosnα
)=
(cos(n +1)α −sin(n +1)αsin(n +1)α cos(n +1)α
)= R(n+1)α
La relation est bien vraie au rang n +1.

RécurrenceDeuxième étape : hérédité (preuve que la relation est vraie au rang n +1)
On a :
Rn+1α = RαR
nα
= RαRnα par hypothèse de récurrence
=
(cosα −sinαsinα cosα
)(cosnα −sinnαsinnα cosnα
)=
(cosα cosnα − sinα sinnα −cosα sinnα − sinα cosnαsinα cosnα+cosα sinnα −sinα sinnα+cosα cosnα
)=
(cos(n +1)α −sin(n +1)αsin(n +1)α cos(n +1)α
)= R(n+1)α
La relation est bien vraie au rang n +1.

RécurrenceDeuxième étape : hérédité (preuve que la relation est vraie au rang n +1)
On a :
Rn+1α = RαR
nα
= RαRnα par hypothèse de récurrence
=
(cosα −sinαsinα cosα
)(cosnα −sinnαsinnα cosnα
)
=
(cosα cosnα − sinα sinnα −cosα sinnα − sinα cosnαsinα cosnα+cosα sinnα −sinα sinnα+cosα cosnα
)=
(cos(n +1)α −sin(n +1)αsin(n +1)α cos(n +1)α
)= R(n+1)α
La relation est bien vraie au rang n +1.

RécurrenceDeuxième étape : hérédité (preuve que la relation est vraie au rang n +1)
On a :
Rn+1α = RαR
nα
= RαRnα par hypothèse de récurrence
=
(cosα −sinαsinα cosα
)(cosnα −sinnαsinnα cosnα
)=
(cosα cosnα − sinα sinnα −cosα sinnα − sinα cosnαsinα cosnα+cosα sinnα −sinα sinnα+cosα cosnα
)
=
(cos(n +1)α −sin(n +1)αsin(n +1)α cos(n +1)α
)= R(n+1)α
La relation est bien vraie au rang n +1.

RécurrenceDeuxième étape : hérédité (preuve que la relation est vraie au rang n +1)
On a :
Rn+1α = RαR
nα
= RαRnα par hypothèse de récurrence
=
(cosα −sinαsinα cosα
)(cosnα −sinnαsinnα cosnα
)=
(cosα cosnα − sinα sinnα −cosα sinnα − sinα cosnαsinα cosnα+cosα sinnα −sinα sinnα+cosα cosnα
)=
(cos(n +1)α −sin(n +1)αsin(n +1)α cos(n +1)α
)
= R(n+1)α
La relation est bien vraie au rang n +1.

RécurrenceDeuxième étape : hérédité (preuve que la relation est vraie au rang n +1)
On a :
Rn+1α = RαR
nα
= RαRnα par hypothèse de récurrence
=
(cosα −sinαsinα cosα
)(cosnα −sinnαsinnα cosnα
)=
(cosα cosnα − sinα sinnα −cosα sinnα − sinα cosnαsinα cosnα+cosα sinnα −sinα sinnα+cosα cosnα
)=
(cos(n +1)α −sin(n +1)αsin(n +1)α cos(n +1)α
)= R(n+1)α
La relation est bien vraie au rang n +1.

RécurrenceDeuxième étape : hérédité (preuve que la relation est vraie au rang n +1)
On a :
Rn+1α = RαR
nα
= RαRnα par hypothèse de récurrence
=
(cosα −sinαsinα cosα
)(cosnα −sinnαsinnα cosnα
)=
(cosα cosnα − sinα sinnα −cosα sinnα − sinα cosnαsinα cosnα+cosα sinnα −sinα sinnα+cosα cosnα
)=
(cos(n +1)α −sin(n +1)αsin(n +1)α cos(n +1)α
)= R(n+1)α
La relation est bien vraie au rang n +1.

RécurrenceTroisième étape : conclusion
I On a prouvé par récurrence que, pour tout n > 1, Rnα = Rnα .
I Donc, faire subir à un vecteur n fois une rotation d’angle αrevient à lui faire subir une rotation d’angle nα.

RécurrenceTroisième étape : conclusion
I On a prouvé par récurrence que, pour tout n > 1, Rnα = Rnα .
I Donc, faire subir à un vecteur n fois une rotation d’angle αrevient à lui faire subir une rotation d’angle nα.

RécurrenceTroisième étape : conclusion
I On a prouvé par récurrence que, pour tout n > 1, Rnα = Rnα .
I Donc, faire subir à un vecteur n fois une rotation d’angle αrevient à lui faire subir une rotation d’angle nα.

RécurrenceRemarque
On aurait même pu prouver
1
que, pour tout n > 0, Rnα = Rnα .
1. Preuve laissée en exercice.

RécurrenceRemarque
On aurait même pu prouver 1 que, pour tout n > 0, Rnα = Rnα .
1. Preuve laissée en exercice.