Kinematics of Rotation of Rigid Bodies
13
Kinematics of Rotation of Rigid Bodie Angle of rotatio lar displacement Δθ = θ – θ 0 0 if rotation is counterclockwise 0 if rotation is clockwise z ngle of rotation θ is dimensionless quantity, ut it is a vector z i r s R adius length Arc radians in ) ( If θ is in radians, then s=rθ and s’=r’θ with the same r s r’ s’ 0 0 0 3 . 57 2 360 1 360 2 2 1 rad rad r r revolution
description
Kinematics of Rotation of Rigid Bodies. Angular displacement Δθ = θ – θ 0 Δθ > 0 if rotation is counterclockwise Δθ < 0 if rotation is clockwise. z. Angle of rotation. s. s’. Angle of rotation θ is a dimensionless quantity, but it is a vector. r’. r. - PowerPoint PPT Presentation
Transcript of Kinematics of Rotation of Rigid Bodies

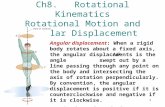
Kinematics of Rotation of Rigid Bodies
Angle of rotationAngular displacement Δθ = θ – θ0
Δθ > 0 if rotation is counterclockwiseΔθ < 0 if rotation is clockwise
z
Angle of rotation θ is a dimensionless quantity, but it is a vector
zi
rs
RadiuslengthArcradiansin )( If θ is in radians, then
s=rθ and s’=r’θ with the same θ.
r
s
r’s’
00
0 3.5723601360221
radrad
rrrevolution

Example:A total eclipseof the sun

Average angular velocityAngular Velocity and Acceleration
rpmrevors
radttt zz
min
,0
0
Instantaneous angular velocity
zz idtd
t
,lim0t
z z
ωz>0 ωz<0
Average angular acceleration
20
0 ,srad
ttt zzzz
z
Instantaneous angular acceleration
zzzz
z idtd
dtd
t
,lim 2
2
0t
Instantaneous angular speed is a scalar .||

Kinematic Equations of Linear and Angular Motionwith Constant Acceleration
(1)
(3)
(4)
(2)
Rotational motion Quantity Linear motionθ Displacement x
ω0z Initial velocity v0x
ωz Final velocity vx
αz Acceleration ax
t Time t


Relations between Angular and Tangential Kinematic Quantities
Ice-skating stunt“crack-the-whip”
dtdr
dtdv
dtdr
dtds
rs

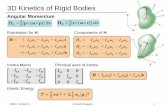
Centripetal and Tangential Accelerations in Rotational Kinematics

Exam Example 22: Throwing a Discus (example 9.4)

Rotational Kinetic Energy and Moment of InertiaKinetic energy of one particle 222
21
21 mrmvK T
Rotational kinetic energy is the kinetic energy of the entire rigid body rotating with the angular speed ω
222
21
21 IKrmK R
iiiR
Definition of the moment of inertia i V
ii dVrrmI 22
Total mechanical energy
UIMvE cmcm 22
21
21
Translationalkinetic energy
Rotational kinetic energy cmr
r
'rcmv
0cm
Parallel-Axis Theorem 2cmcm MrII
Proof:
i
iicmi i
cmii
iicmi rmrrmrmrrmI '2)(')'( 222 =0
Potentialenergy
ω
vh

Rotation about an Axis Shifted from a Center of Mass Position

Exam Example 23: Blocks descending over a massive pulley (problem 9.75)
Rm1
m2
gm
2
gm1
1NF
2T
1T
2T
1T
x
y
F
ay
ω
0
Δy
Data: m1, m2, μk, I, R, Δy, v0y=0Find: (a) vy; (b) t, ay; (c) ω,α; (d) T1, T2
kf
Solution: (a) Work-energy theoremWnc= ΔK + ΔU, ΔU = - m2gΔy,Wnc = - μk m1g Δy , since FN1 = m1g,ΔK=K=(m1+m2)vy
2/2 + Iω2/2 = (m1+m2+I/R2)vy2/2 since vy = Rω
221
1212
2221 /
)(2)(21
RImmmmygvmmygv
RImm k
yky
(b) Kinematics with constant acceleration: t = 2Δy/vy , ay = vy2/(2Δy)
(c) ω = vy/R , α = ay/R = vy2/(2ΔyR)
(d) Newton’s second law for each block: T1x + fkx = m1ay → T1x= m1 (ay + μk g) ,
T2y + m2g = m2ay → T2y = - m2 (g – ay)

Moments of Inertia of Various BodiesScaling law and order of magnitude I ~ ML2
22
2
31
2121 MLLMMLI

Moment of Inertia CalculationsCylinder rotating about axis of symmetry
2122
21
22
41
42
32
242
2)2(2
1
2
1
RRRRLRRL
drrLrLdrrIR
R
R
R
The total mass of the cylinder is
)( 21
22 RRLVM
Result: )(21 2
221 RRMI