![Apostila - Comandos El_tricos - Exercicios[1]](https://static.fdocument.org/doc/165x107/5571fcdb49795991699810b6/apostila-comandos-eltricos-exercicios1.jpg)







γλώσσες
Σελίδες
Νομικός

5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 1/37
Controle de Sistemas Mecânicos
Efeito dos ControladoresEfeito dos Controladores
Efeito do controlador P Efeito do controlador PI
Efeito do controlador PD
Exercícios
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 2/37
Controle de Sistemas Mecânicos
Exemplo 1: Controlador P e SPOExemplo 1: Controlador P e SPO
Dado um sistema de primeira ordem P(s) com ganho estático k
e constante de tempoτ
, obter a função de transferência demalha fechada T(s) para uma realimentação unitária e com a
introdução de um controlador proporcional Kp.
a) Analisar a influência nos pólos, zeros e no ganho estático
do sistema de malha fechada.
b) Obter a resposta ao degrau e analisar a influência na
velocidade da resposta e no erro estacionário para (Kp=2 e
Kp=20), com ganho estático k = 1 e constante de tempo τ =2.
c) Obter a resposta em freqüência e analisar a influência na
faixa de resposta em freqüência
( )
1)(
)(
+τ
==
s
k
sU
sY s P
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 3/37
Controle de Sistemas Mecânicos
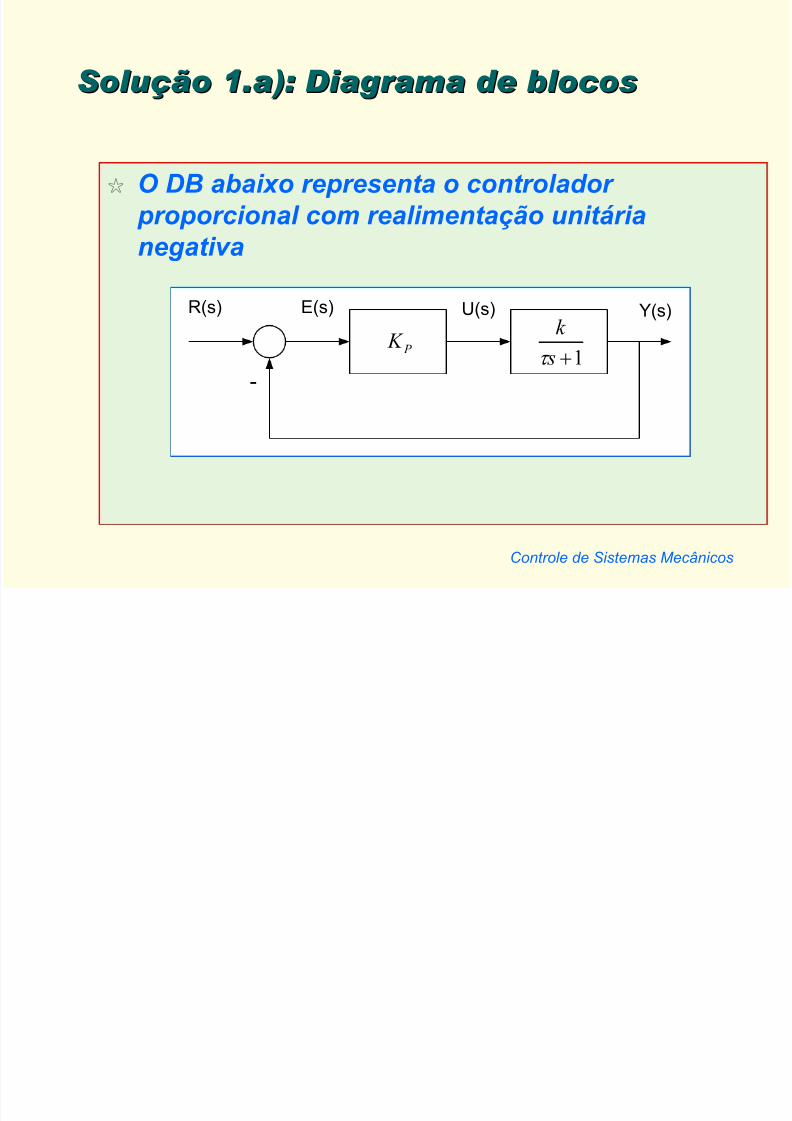
Solução 1.a): Diagrama de blocosSolução 1.a): Diagrama de blocos
R(s) E(s) U(s) Y(s)
-
P K
1+ s
k
τ
O DB abaixo representa o controlador
proporcional com realimentação unitárianegativa
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 4/37
Controle de Sistemas Mecânicos
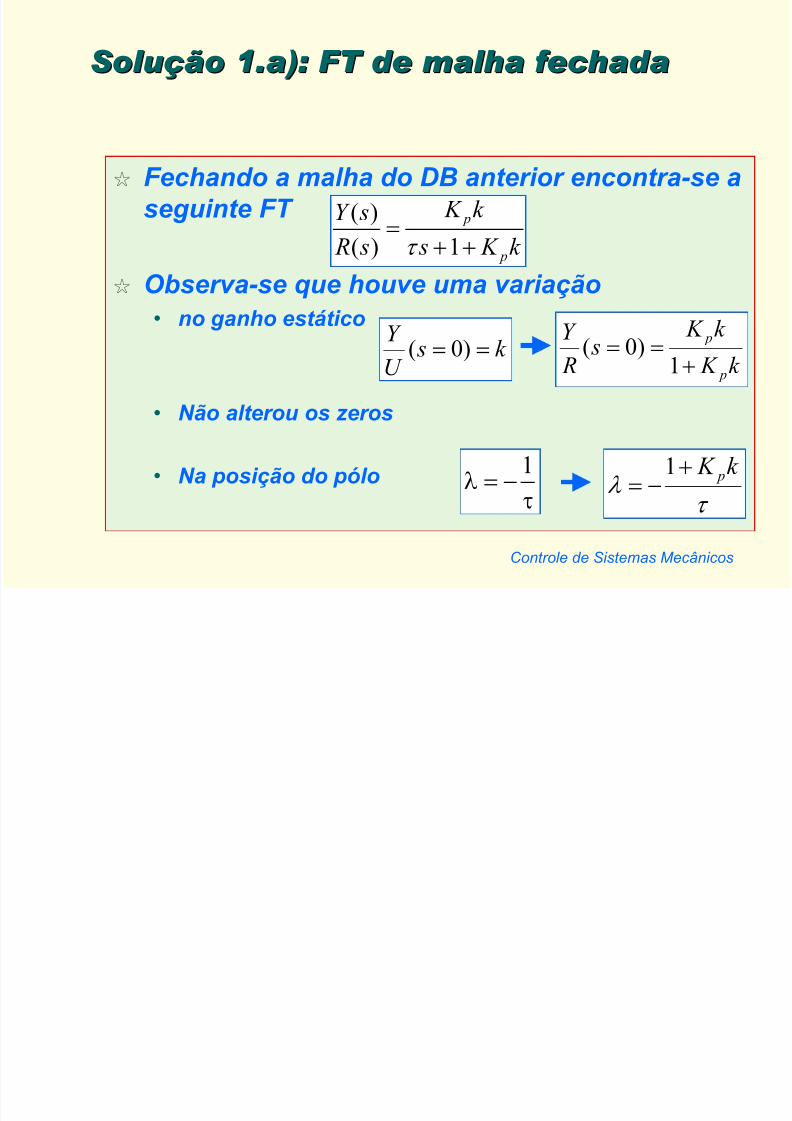
Solução 1.a): FT de malha fechadaSolução 1.a): FT de malha fechada
Fechando a malha do DB anterior encontra-se a
seguinte FT
Observa-se que houve uma variação
• no ganho estático
• Não alterou os zeros
• Na posição do pólo
( )
( ) 1
p
p
K k Y s
R s s K k τ =
+ +
k K
k K s
R
Y
p
p
+==
1)0(
τ
λ k K p+
−=1
k sU
Y == )0(
τ−=λ
1
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 5/37
Controle de Sistemas Mecânicos
Solução 1.b): Resposta ao degrau Solução 1.b): Resposta ao degrau
unitáriounitário
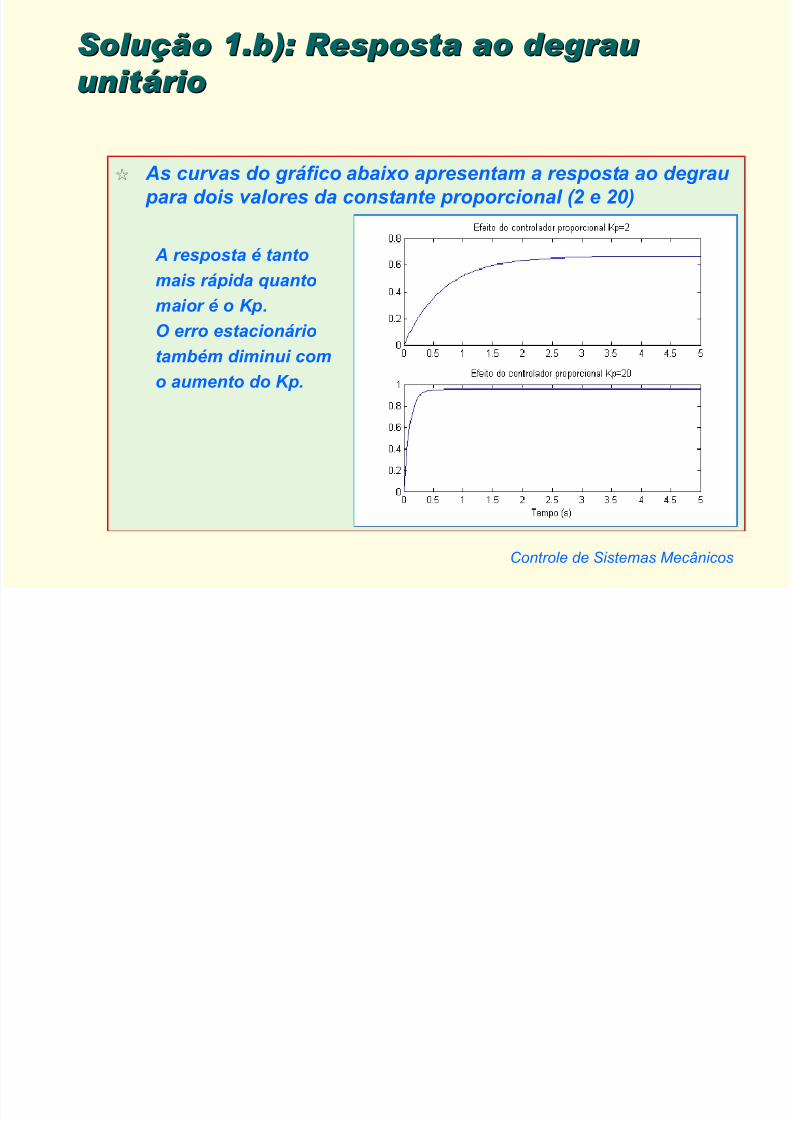
As curvas do gráfico abaixo apresentam a resposta ao degrau
para dois valores da constante proporcional (2 e 20)
A resposta é tanto
mais rápida quanto
maior é o Kp.O erro estacionário
também diminui com
o aumento do Kp.
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 6/37
Controle de Sistemas Mecânicos
Solução 1.b): Programa no MATLABSolução 1.b): Programa no MATLAB
clear all, close all
tau=2; k=1; Kp=2;
w=linspace(0,50,400); NT=[Kp*k];
DT=[tau 1+Kp*k];
t=0:0.05:5;
T=tf(NT,DT);
y=step(T,t);
subplot(211), plot(t,y)
title('Efeito do controlador proporcional
kp=2')
Kp=20;
NT=[Kp*k]; DT=[tau 1+Kp*k];
T=tf(NT,DT);
figure(1)
y=step(T,t);
subplot(212), plot(t,y)
title('Efeito do controlador proporcional
kp=20')
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 7/37
Controle de Sistemas Mecânicos
Solução 1.c): Resposta em freqüênciaSolução 1.c): Resposta em freqüência
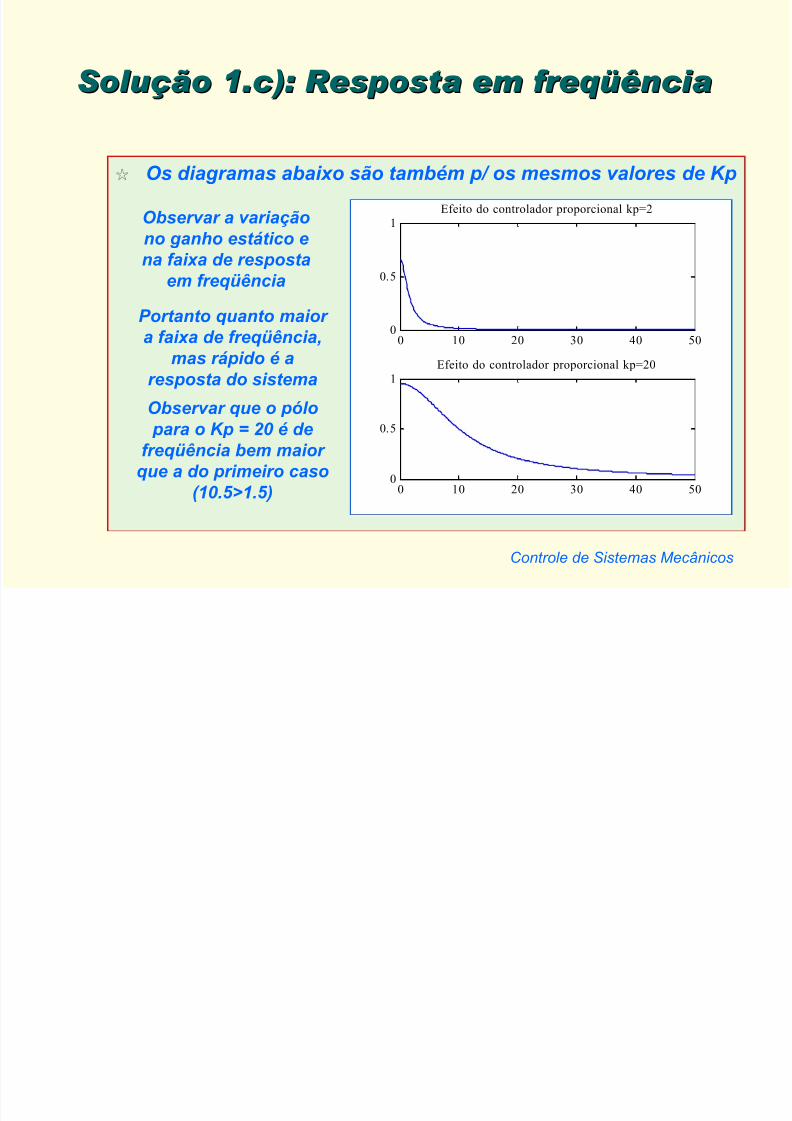
Os diagramas abaixo são também p/ os mesmos valores de Kp
0 10 20 30 40 500
0.5
1Efeito do controlador proporcional kp=2
0 10 20 30 40 500
0.5
1
Efeito do controlador proporcional kp=20
Observar a variação
no ganho estático e
na faixa de resposta
em freqüência
Observar que o pólo para o Kp = 20 é de
freqüência bem maior
que a do primeiro caso
(10.5>1.5)
Portanto quanto maior a faixa de freqüência,
mas rápido é a
resposta do sistema
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 8/37
Controle de Sistemas Mecânicos
Solução 1.c): Programa no MATLABSolução 1.c): Programa no MATLAB
clear all, close all
tau=2; k=1; Kp=2;
w=linspace(0,50,400); NT=[Kp*k];
DT=[tau 1+Kp*k];
t=0:0.05:5;
T=tf(NT,DT);
resp=freqresp(T,w);
y1=squeeze(resp);
figure(1), subplot(211), plot(w,abs(y1))
xlabel('') axis([0 50 0 1])
title('Efeito do controlador proporcionalkp=2')
Kp=20;
NT=[Kp*k];
DT=[tau 1+Kp*k]; T=tf(NT,DT);
resp=freqresp(T,w);
y2=squeeze(resp);
figure(1), subplot(212), plot(w,abs(y2))
xlabel('')
axis([0 50 0 1])
title('Efeito do
controlador proporcionalkp=20')
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 9/37
Controle de Sistemas Mecânicos
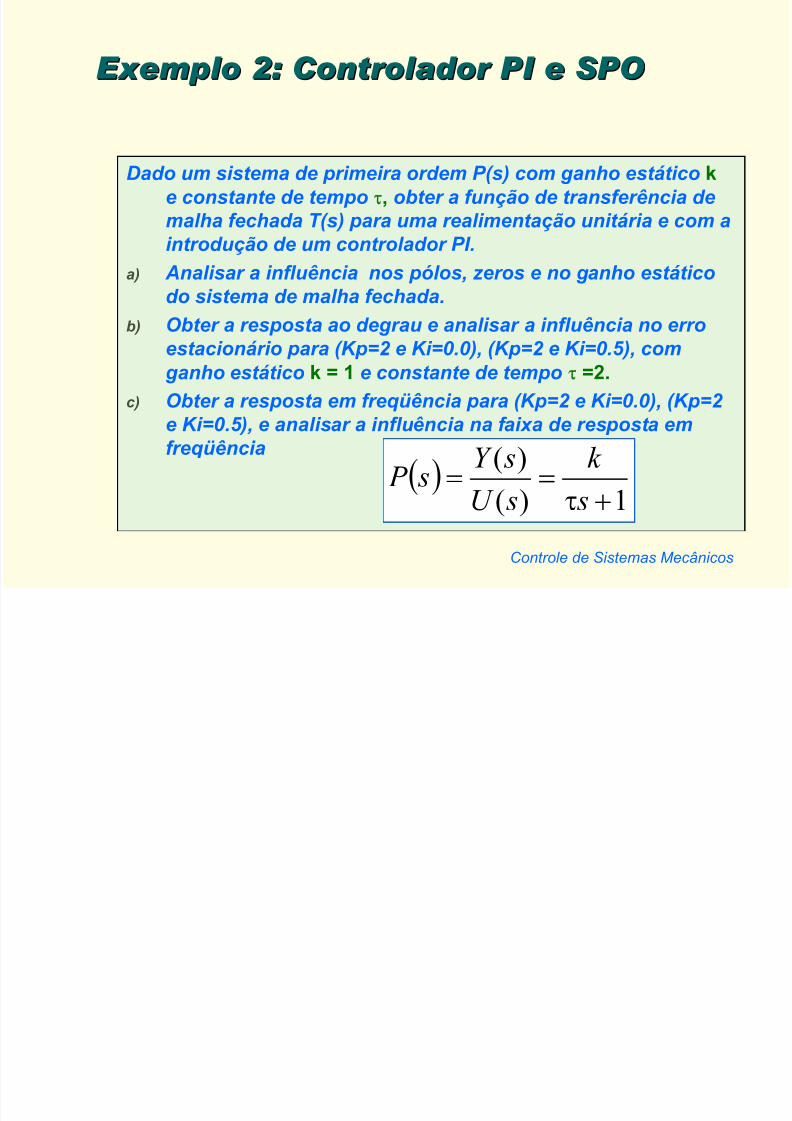
Exemplo 2: Controlador PI e SPOExemplo 2: Controlador PI e SPO
Dado um sistema de primeira ordem P(s) com ganho estático k
e constante de tempo τ, obter a função de transferência de
malha fechada T(s) para uma realimentação unitária e com a
introdução de um controlador PI.
a) Analisar a influência nos pólos, zeros e no ganho estático
do sistema de malha fechada.
b) Obter a resposta ao degrau e analisar a influência no erro
estacionário para (Kp=2 e Ki=0.0), (Kp=2 e Ki=0.5), com
ganho estático k = 1 e constante de tempo τ =2.
c) Obter a resposta em freqüência para (Kp=2 e Ki=0.0), (Kp=2
e Ki=0.5), e analisar a influência na faixa de resposta em
freqüência
( )1)(
)(
+τ==
s
k
sU
sY s P
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 10/37
Controle de Sistemas Mecânicos
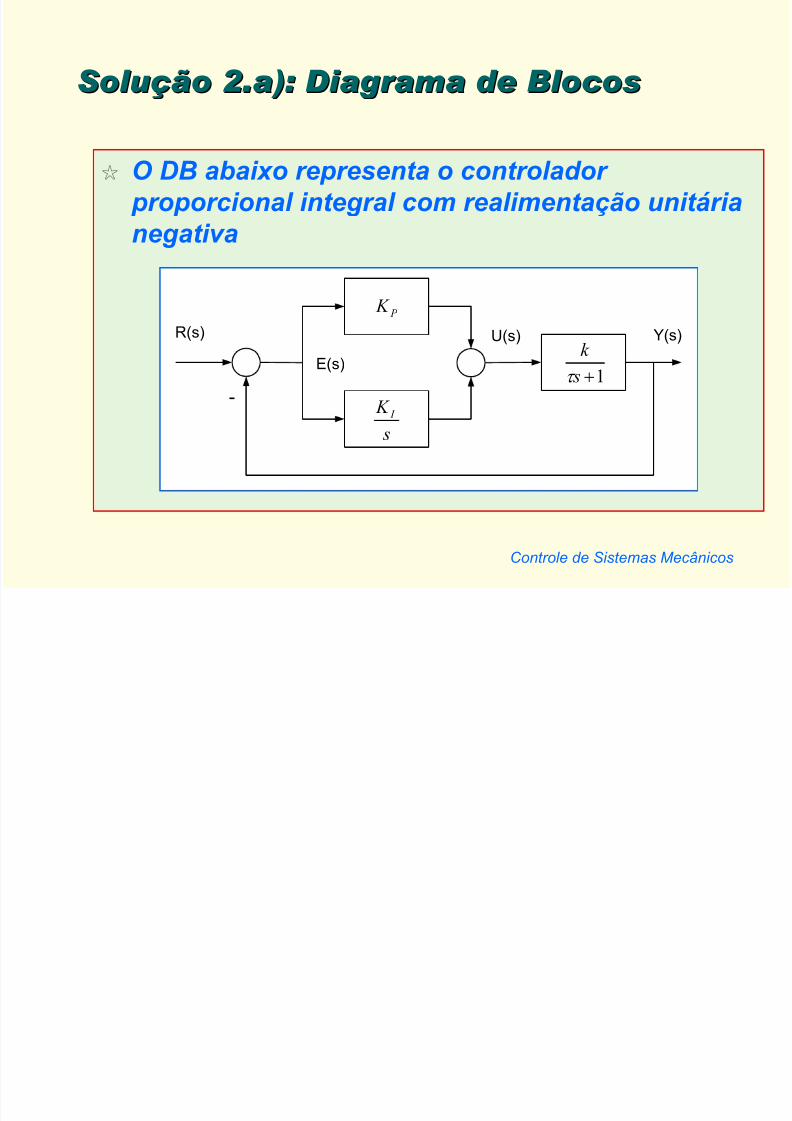
Solução 2.a): Diagrama de BlocosSolução 2.a): Diagrama de Blocos
R(s)
E(s)
U(s) Y(s)
-
P K
1+ s
k
τ
s
K I
O DB abaixo representa o controlador
proporcional integral com realimentação unitárianegativa

5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 11/37
Controle de Sistemas Mecânicos
Solução 2.a): FT de malha fechadaSolução 2.a): FT de malha fechada
Fechando a malha, obtém-se
Observe que
• ganho estático unitário
• surgiu um zero
• aumentou a ordem do sistema em malha fechada
(surgiu uma nova raiz)
( )( ) k K sk K s
k K ks K
s R
sY
I P
I P
++++=
)1(2τ
1)0( == s R
Y k sU
Y
== )0(
p
i
K
K z −=
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 12/37
Controle de Sistemas Mecânicos
Solução 2.b): Efeito no erro estacionárioSolução 2.b): Efeito no erro estacionário
A ação proporcional não altera o tipo do
sistema de malha direta. A ação integral altera o tipo do sistema de
malha direta, se o ganho de malha direta é do
tipo 0 ele passa a ser do tipo 1, se é do tipo 1, passa a ser do tipo 2, e assim por diante.
Logo para entrada degrau e controlador PI o
erro sempre será nulo.
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 13/37
Controle de Sistemas Mecânicos
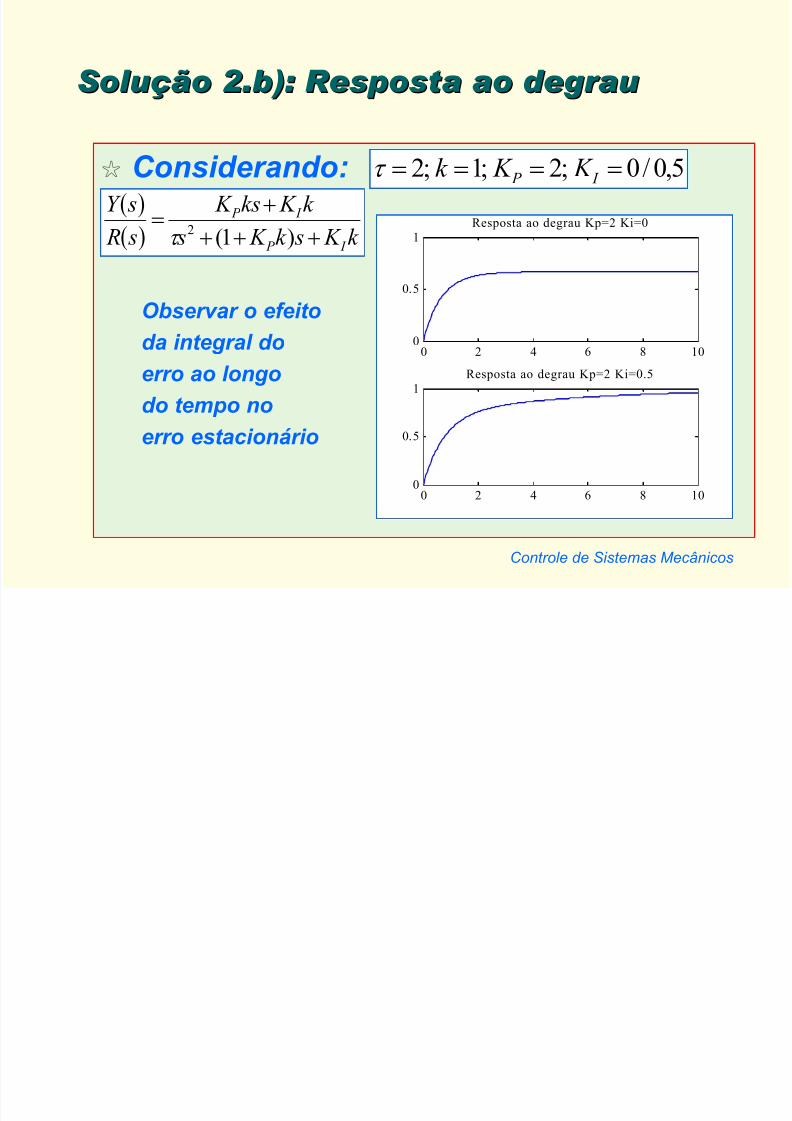
Solução 2.b): Resposta ao degrau Solução 2.b): Resposta ao degrau
Considerando:
Observar o efeitoda integral do
erro ao longo
do tempo noerro estacionário
5,0/0;2;1;2 ==== I P K K k τ
0 2 4 6 8 100
0.5
1Resposta ao degrau Kp=2 Ki=0
0 2 4 6 8 100
0.5
1
Resposta ao degrau Kp=2 Ki=0.5
( )( ) k K sk K s
k K ks K s R sY
I P
I P
++++=
)1(2τ
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 14/37
Controle de Sistemas Mecânicos
Solução 2.b): Programa MATLABSolução 2.b): Programa MATLAB
tau=2; k=1; Kp=2; Ki=0;
w=linspace(0,50,400);
NT=[Kp*k Ki*k]; DT=[tau 1+Kp*k Ki*k];
t=0:0.05:10;
T=tf(NT,DT);
y=step(T,t);
subplot(211), plot(t,y)
axis([0 10 0 1])
title('Resposta ao degrau Kp=2 Ki=0')
Ki=0.5;
NT=[Kp*k Ki*k];
DT=[tau 1+Kp*k Ki*k]; T=tf(NT,DT);
t=0:0.05:10;
figure(1)
y=step(T,t);
subplot(212), plot(t,y)
axis([0 10 0 1])
title('Resposta ao degrau Kp=2 Ki=0.5')
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 15/37
Controle de Sistemas Mecânicos
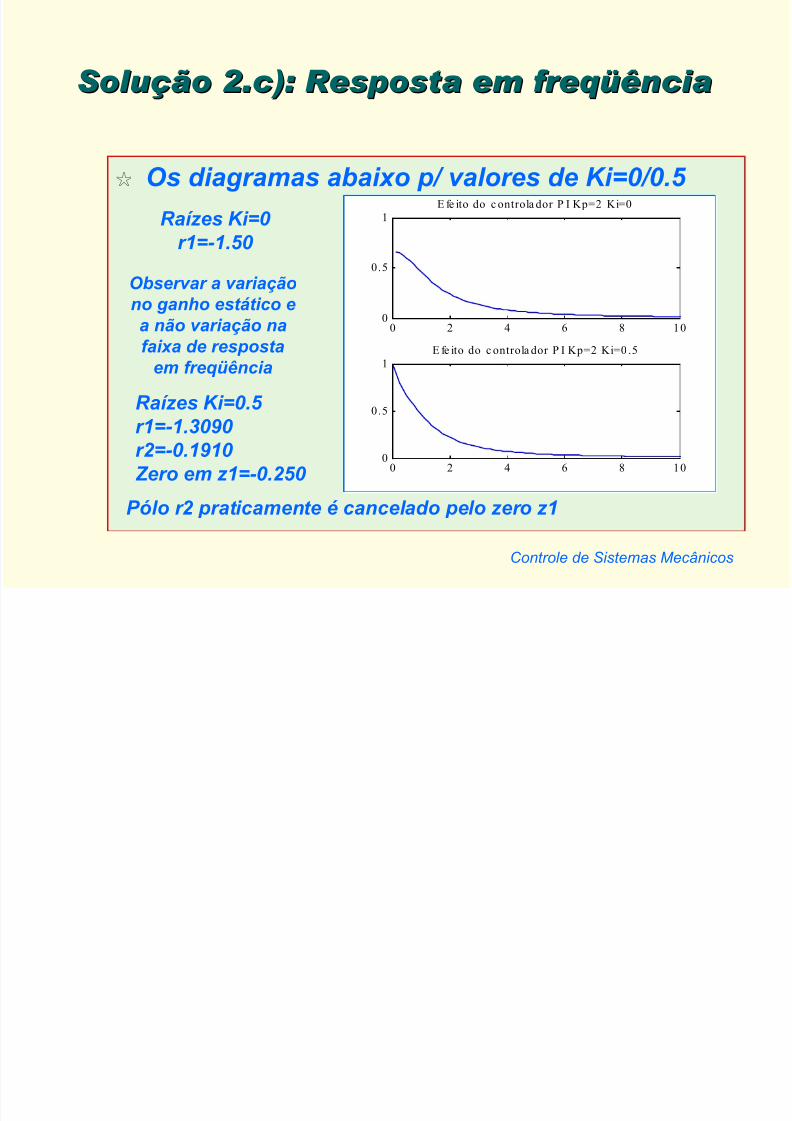
Solução 2.c): Resposta em freqüênciaSolução 2.c): Resposta em freqüência
Os diagramas abaixo p/ valores de Ki=0/0.5
0 2 4 6 8 100
0.5
1 E fe ito do c ontrola dor P I Kp=2 Ki=0
0 2 4 6 8 100
0.5
1
E fe ito do c ontrola dor P I Kp=2 Ki=0 .5
Observar a variação
no ganho estático ea não variação na
faixa de resposta
em freqüência
Raízes Ki=0.5
r1=-1.3090
r2=-0.1910
Zero em z1=-0.250
Raízes Ki=0
r1=-1.50
Pólo r2 praticamente é cancelado pelo zero z1
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 16/37
Controle de Sistemas Mecânicos
Solução 2.c): Programa MATLABSolução 2.c): Programa MATLAB
tau=2; k=1; Kp=2; Ki=0;
w=linspace(0,50,400);
NT=[Kp*k Ki*k]; DT=[tau 1+Kp*k Ki*k];
t=0:0.05:10;
T=tf(NT,DT);
resp=freqresp(T,w); y1=squeeze(resp);
figure(2), subplot(211), plot(w,abs(y1)),xlabel('')
axis([0 10 0 1])
title('Efeito do controlador PI Kp=2 Ki=0')
Ki=0.5;
NT=[Kp*k Ki*k];
DT=[tau 1+Kp*k Ki*k]; T=tf(NT,DT);
resp=freqresp(T,w);
y2=squeeze(resp);
figure(2), subplot(212),
plot(w,abs(y2)),
xlabel('')
axis([0 10 0 1])
title('Efeito do
controlador PI Kp=2
Ki=0.5')
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 17/37
Controle de Sistemas Mecânicos
Exemplo 3: Controlador PD e SPOExemplo 3: Controlador PD e SPO
Dado um sistema de primeira ordem P(s) com ganho estático k
e constante de tempo τ, obter a função de transferência de
malha fechada T(s) para uma realimentação unitária e com a
introdução de um controlador PD.
a) Analisar a influência nos pólos, zeros e no ganho estático
do sistema de malha fechada.
b) Obter a resposta ao degrau e analisar a influência no erro
estacionário para (Kp=2 e Kd=0.0), (Kp=2 e Kd=0.5), com
ganho estático k = 1 e constante de tempo τ =2.
c) Obter a resposta em freqüência para (Kp=2 e Kd=0.0), (Kp=2
e Kd=0.5), e analisar a influência na faixa de resposta em
freqüência
( )1)(
)(
+τ==
s
k
sU
sY s P
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 18/37
Controle de Sistemas Mecânicos
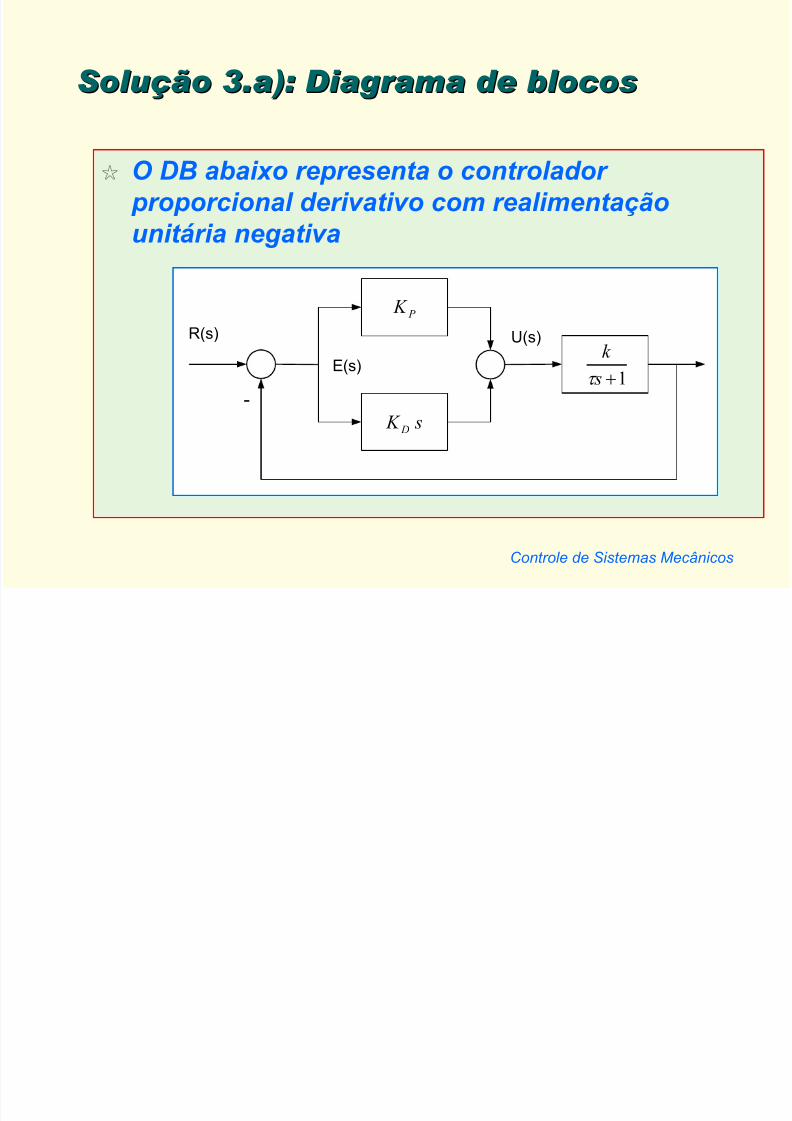
Solução 3.a): Diagrama de blocosSolução 3.a): Diagrama de blocos
R(s)
E(s)
U(s)
-
P K
1+ s
k
τ
s K D
O DB abaixo representa o controlador
proporcional derivativo com realimentaçãounitária negativa

5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 19/37
Controle de Sistemas Mecânicos
Solução 3.a): FT de malha fechadaSolução 3.a): FT de malha fechada
Fechando a malha, obtém-se (FTMF)
Observe que
– Variou o Ganho estático
– surgiu um zero
– variou a posição do pólo
( ) k K sk K
k K s K
s R
sY
p D
p D
++++=
1
)(
)(
)(
τ
k K
k K
s R
Y
p
p
+== 1)0(k sU
Y
== )0(
D
P
K
K z −=
k K
k K
D
p
+
+−=τ
λ 1
τ−=λ
1
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 20/37
Controle de Sistemas Mecânicos
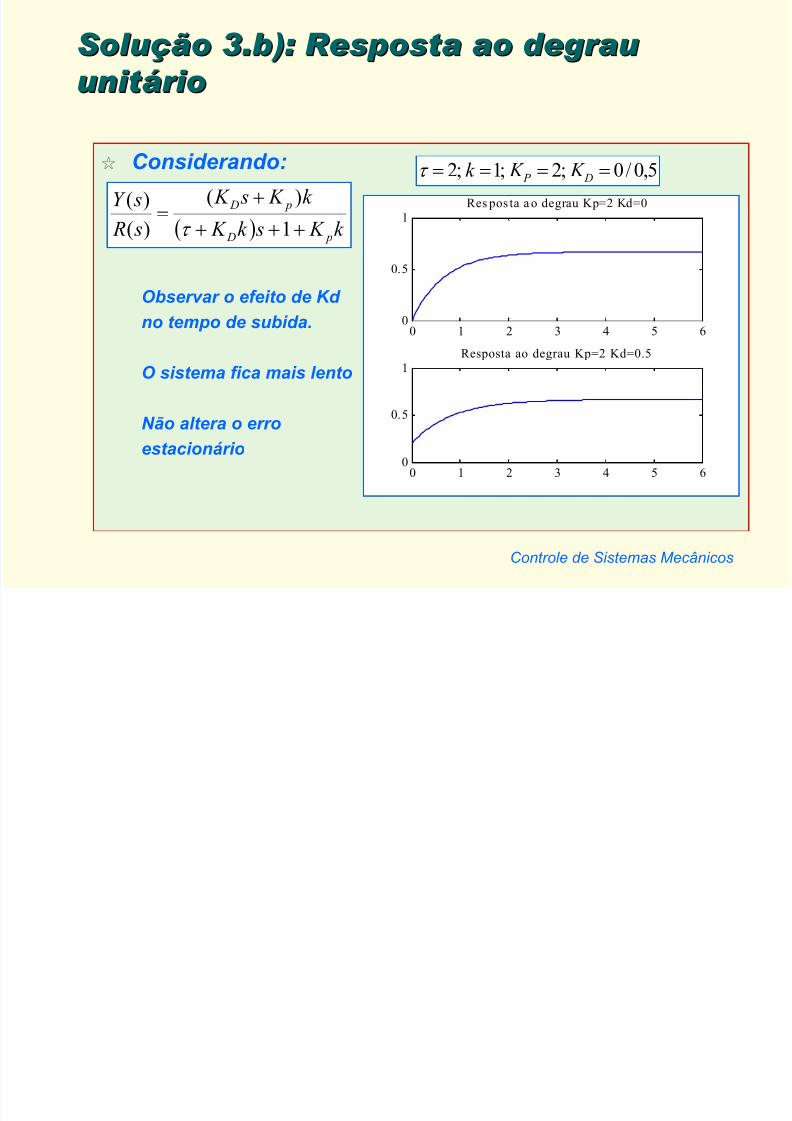
Solução 3.b): Resposta ao degrau Solução 3.b): Resposta ao degrau
unitáriounitário
Considerando:
Observar o efeito de Kd
no tempo de subida.
O sistema fica mais lento
Não altera o erro
estacionário
5,0/0;2;1;2 ==== D P K K k τ
0 1 2 3 4 5 60
0.5
1Res pos ta a o degrau Kp=2 Kd=0
0 1 2 3 4 5 60
0.5
1Resposta ao degrau Kp=2 Kd=0.5
( ) k K sk K
k K s K
s R
sY
p D
p D
+++
+= 1
)(
)(
)(
τ
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 21/37
Controle de Sistemas Mecânicos
Solução 3.b): Programa MATLABSolução 3.b): Programa MATLAB
clear all, close all
tau=2; k=1; Kp=2; Kd=0;
w=linspace(0,20,400);
NT=[Kd*k Kp*k];
DT=[(tau+Kd*k) 1+Kp*k];
t=0:0.05:6;
T=tf(NT,DT);
y=step(T,t);
subplot(211), plot(t,y)
axis([0 6 0 1]) title('Resposta ao
degrau Kp=2 Kd=0')
Kd=0.5;
NT=[Kd*k Kp*k];
DT=[(tau+Kd*k) 1+Kp*k];
T=tf(NT,DT);
t=0:0.05:6;
figure(1)
y=step(T,t);
subplot(212), plot(t,y)
axis([0 6 0 1])
title('Resposta ao degrau Kp=2 Kd=0.5')
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 22/37
Controle de Sistemas Mecânicos
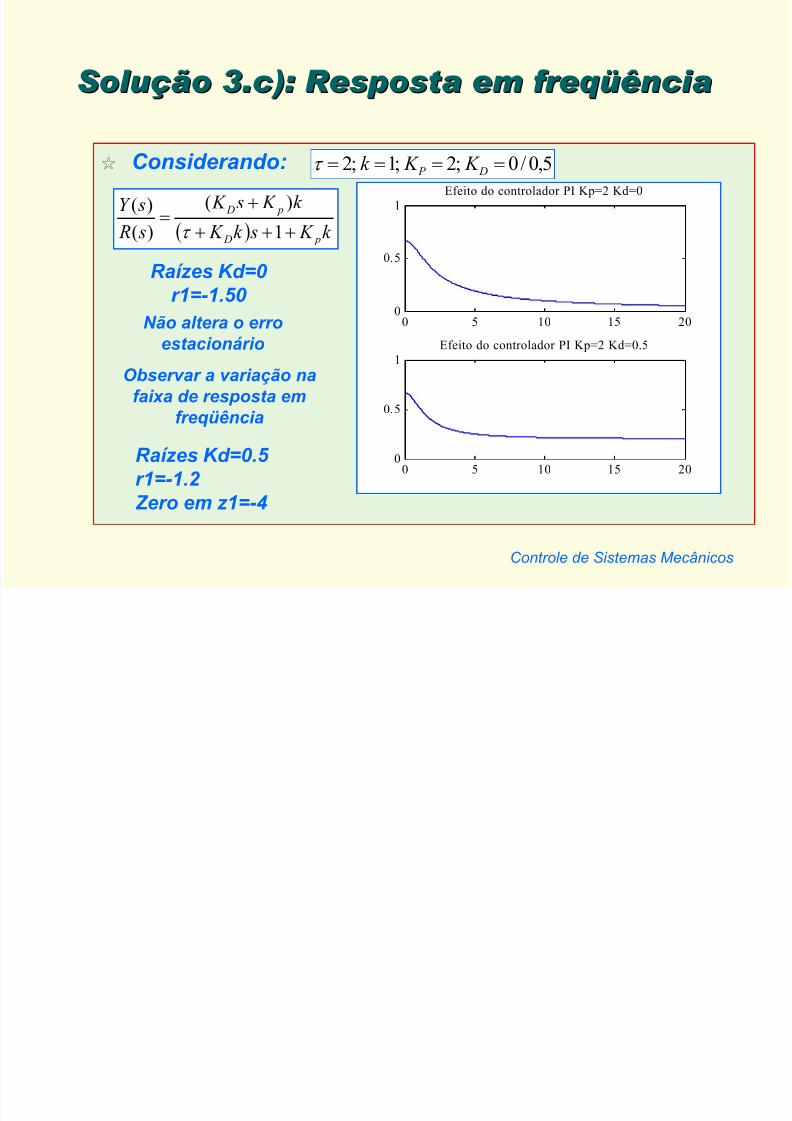
Solução 3.c): Resposta em freqüênciaSolução 3.c): Resposta em freqüência
Considerando: 5,0/0;2;1;2 ==== D P K K k τ
0 5 10 15 200
0.5
1
Efeito do controlador PI Kp=2 Kd=0
0 5 10 15 200
0.5
1
Efeito do controlador PI Kp=2 Kd=0.5
Observar a variação na
faixa de resposta em
freqüência
Raízes Kd=0.5
r1=-1.2
Zero em z1=-4
Raízes Kd=0
r1=-1.50
( ) k K sk K k K s K
s R sY
p D
p D
+++ += 1)(
)()(
τ
Não altera o erro
estacionário
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 23/37
Controle de Sistemas Mecânicos
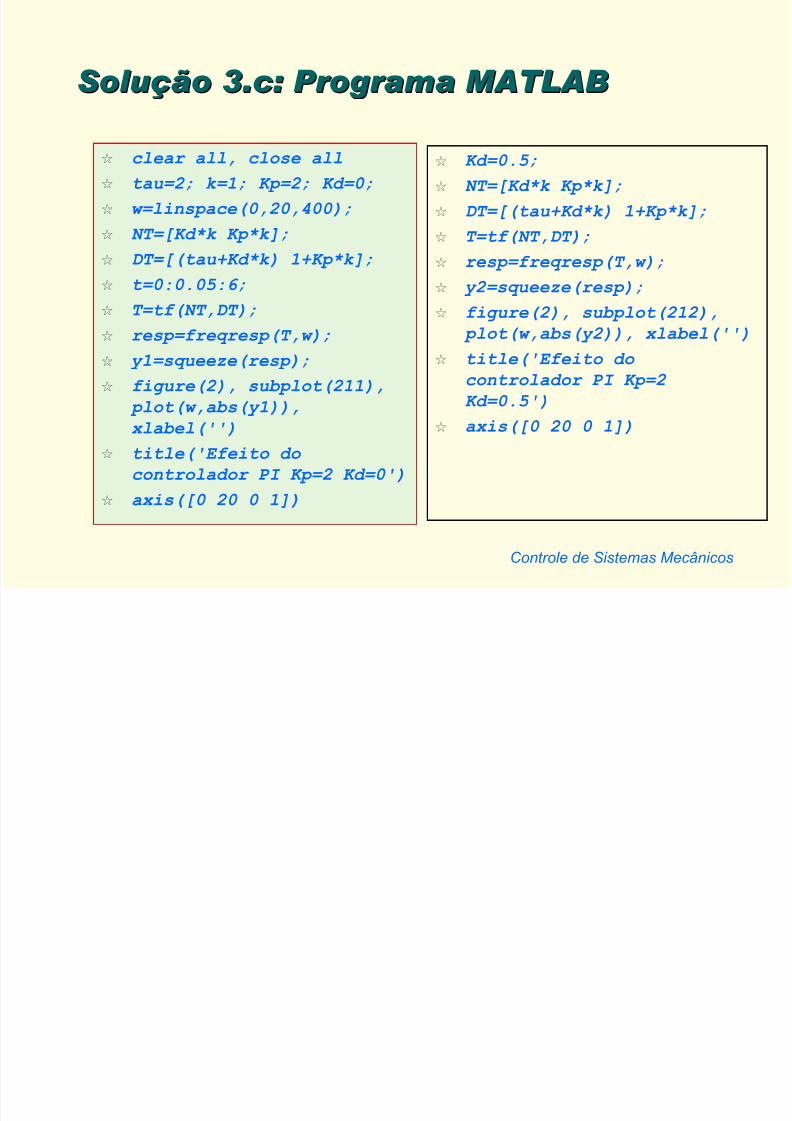
Solução 3.c: Programa MATLABSolução 3.c: Programa MATLAB
clear all, close all
tau=2; k=1; Kp=2; Kd=0;
w=linspace(0,20,400); NT=[Kd*k Kp*k];
DT=[(tau+Kd*k) 1+Kp*k];
t=0:0.05:6;
T=tf(NT,DT);
resp=freqresp(T,w);
y1=squeeze(resp);
figure(2), subplot(211),
plot(w,abs(y1)),
xlabel('')
title('Efeito do
controlador PI Kp=2 Kd=0')
axis([0 20 0 1])
Kd=0.5;
NT=[Kd*k Kp*k];
DT=[(tau+Kd*k) 1+Kp*k]; T=tf(NT,DT);
resp=freqresp(T,w);
y2=squeeze(resp);
figure(2), subplot(212), plot(w,abs(y2)), xlabel('')
title('Efeito do
controlador PI Kp=2
Kd=0.5')
axis([0 20 0 1])
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 24/37
Controle de Sistemas Mecânicos
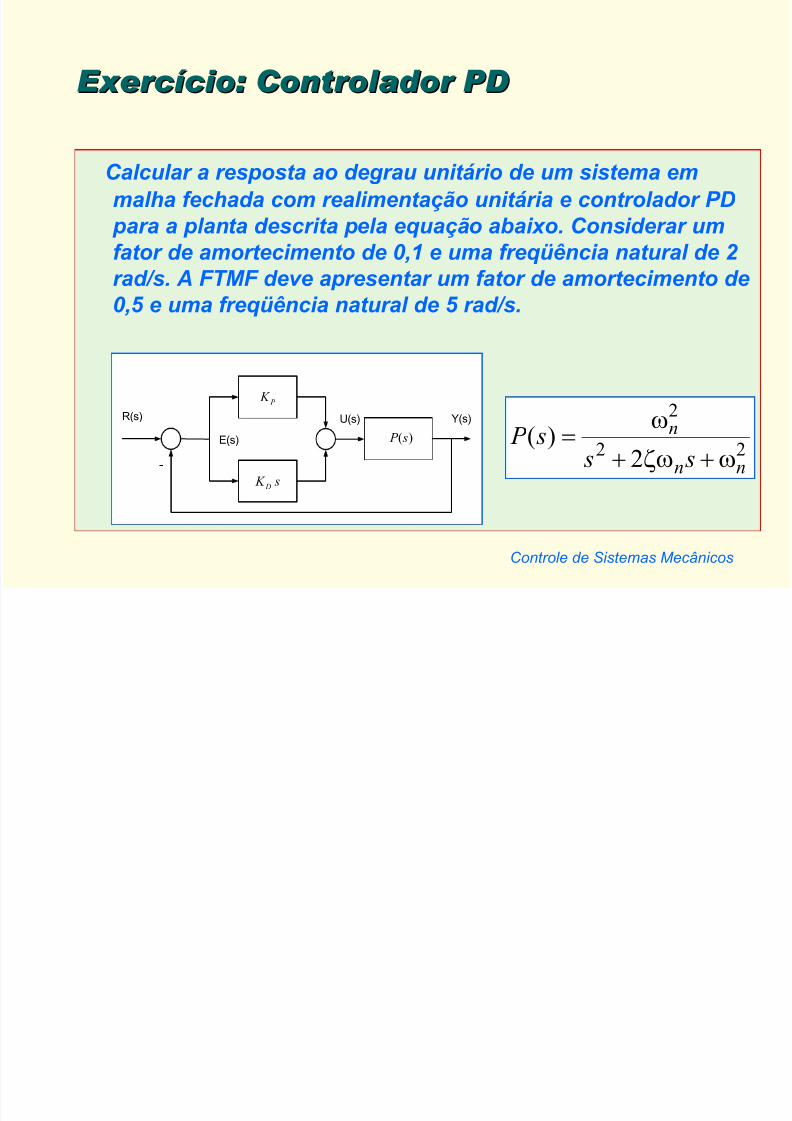
Exercício: Exercício: Controlador Controlador PD PD
Calcular a resposta ao degrau unitário de um sistema em
malha fechada com realimentação unitária e controlador PD
para a planta descrita pela equação abaixo. Considerar um
fator de amortecimento de 0,1 e uma freqüência natural de 2
rad/s. A FTMF deve apresentar um fator de amortecimento de
0,5 e uma freqüência natural de 5 rad/s.
Y(s)R(s)
E(s)
U(s)
-
P K
( ) P s
s K D
22
2
2)(
nn
n
s s s P
ω+ζω+ω=
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 25/37
Controle de Sistemas Mecânicos
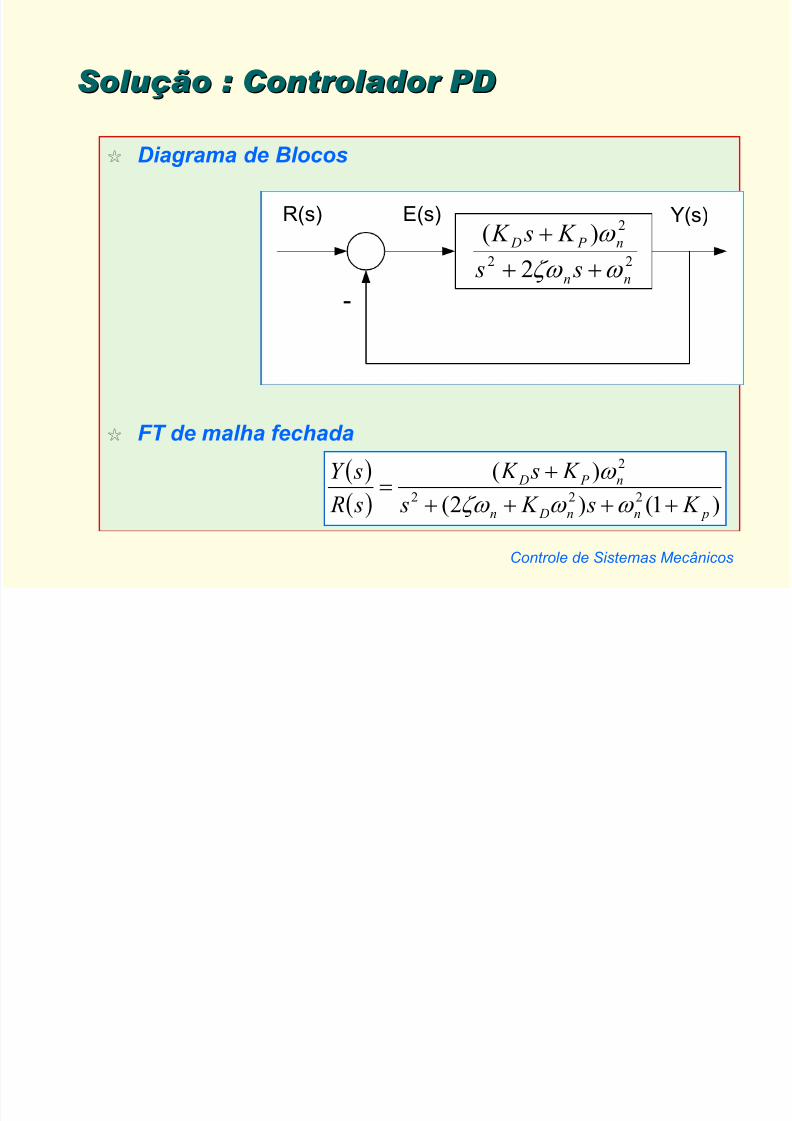
Solução : Solução : Controlador Controlador PD PD
R(s) E(s) Y(s)
-
22
2
2
)(
nn
n P D
s s
K s K
ω ζω
ω
++
+
Diagrama de Blocos
FT de malha fechada
( )
( ) )1()2(
)(222
2
pnn Dn
n P D
K s K s
K s K
s R
sY
+++++
=ω ω ζω
ω

5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 26/37
Controle de Sistemas Mecânicos
Solução : Solução : Controlador Controlador PD PD
55.022*2
5)1(*
2
222
=ω××=ωζ=ω+ζω
=ω=+ω
ef ef ef n Dn
ef P n
K
K
15,1
25,5
=
=
D
P
K
K
Considerando a FT
e os valores desejados, obtém-se o seguinte sistema:
( )( ) )1()2(
)(222
2
P nn Dn
n P D
K s K s K s K
s R sY
+ω+ω+ζω+ω+=
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 27/37
Controle de Sistemas Mecânicos
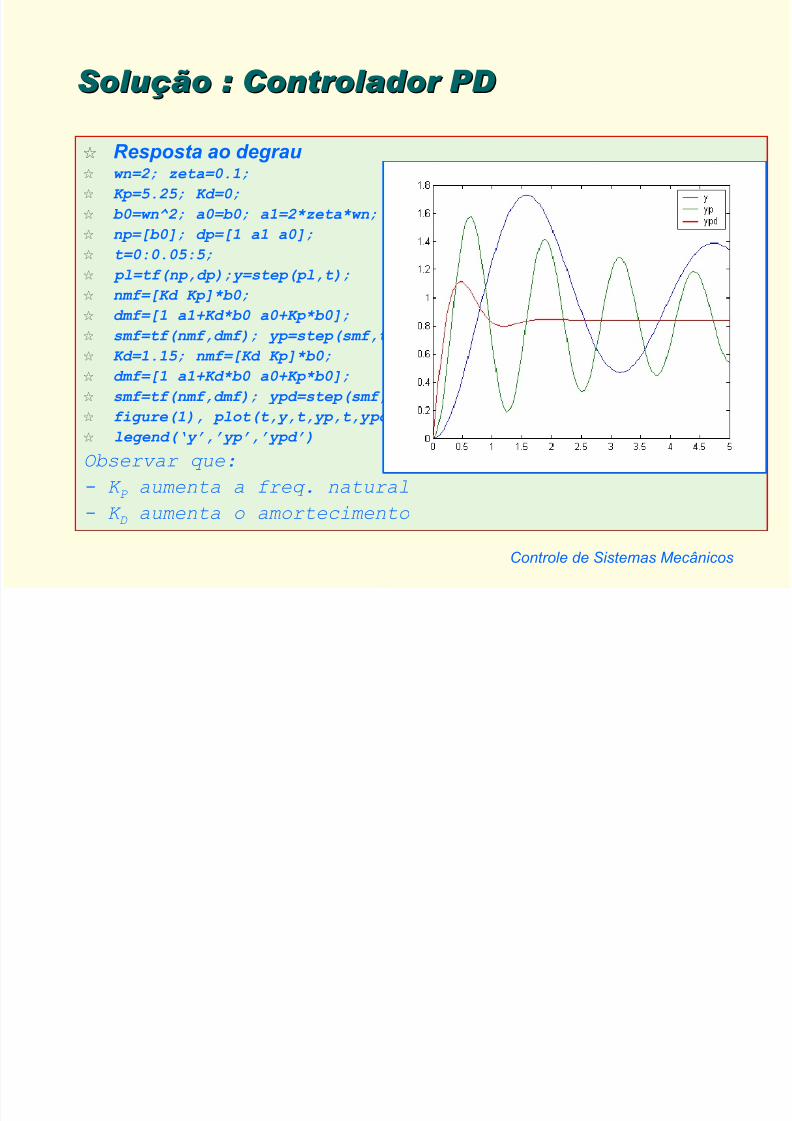
Solução : Solução : Controlador Controlador PD PD
Resposta ao degrau wn=2; zeta=0.1;
Kp=5.25; Kd=0;
b0=wn^2; a0=b0; a1=2*zeta*wn; np=[b0]; dp=[1 a1 a0];
t=0:0.05:5;
pl=tf(np,dp);y=step(pl,t);
nmf=[Kd Kp]*b0;
dmf=[1 a1+Kd*b0 a0+Kp*b0]; smf=tf(nmf,dmf); yp=step(smf,t);
Kd=1.15; nmf=[Kd Kp]*b0;
dmf=[1 a1+Kd*b0 a0+Kp*b0];
smf=tf(nmf,dmf); ypd=step(smf,t);
figure(1), plot(t,y,t,yp,t,ypd) legend(‘y’,’yp’,’ypd’)
Observar que:
- K P aumenta a freq. natural
- K D aumenta o amortecimento
E í i C t l d i ã dE í i C t l d i ã d

5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 28/37
Controle de Sistemas Mecânicos
Exercício: Controle de posição de umaExercício: Controle de posição de uma
inérciainércia
Calcular a resposta ao degrau unitário de um sistema
em malha fechada com realimentação unitária parauma planta com uma inércia de J.
a) controladores proporcional (kp=2 e kp=20)
b) proporcional derivativo (kp=2) (kd=2 e kd=10)
θ= && J T
( )2
1
)(
)(
Js sU
sY s P ==
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 29/37
Controle de Sistemas Mecânicos
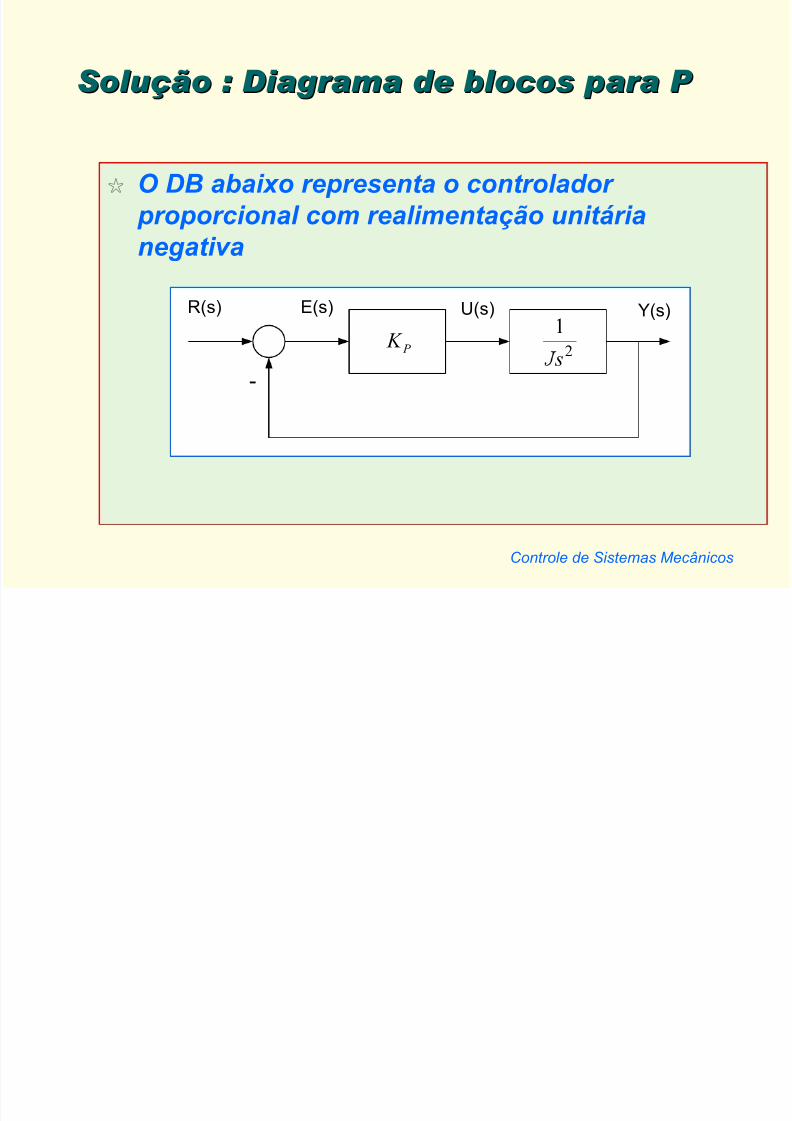
Solução : Diagrama de blocos para P Solução : Diagrama de blocos para P
R(s) E(s)U(s) Y(s)
-
P K 2
1
s
O DB abaixo representa o controlador
proporcional com realimentação unitárianegativa
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 30/37
Controle de Sistemas Mecânicos
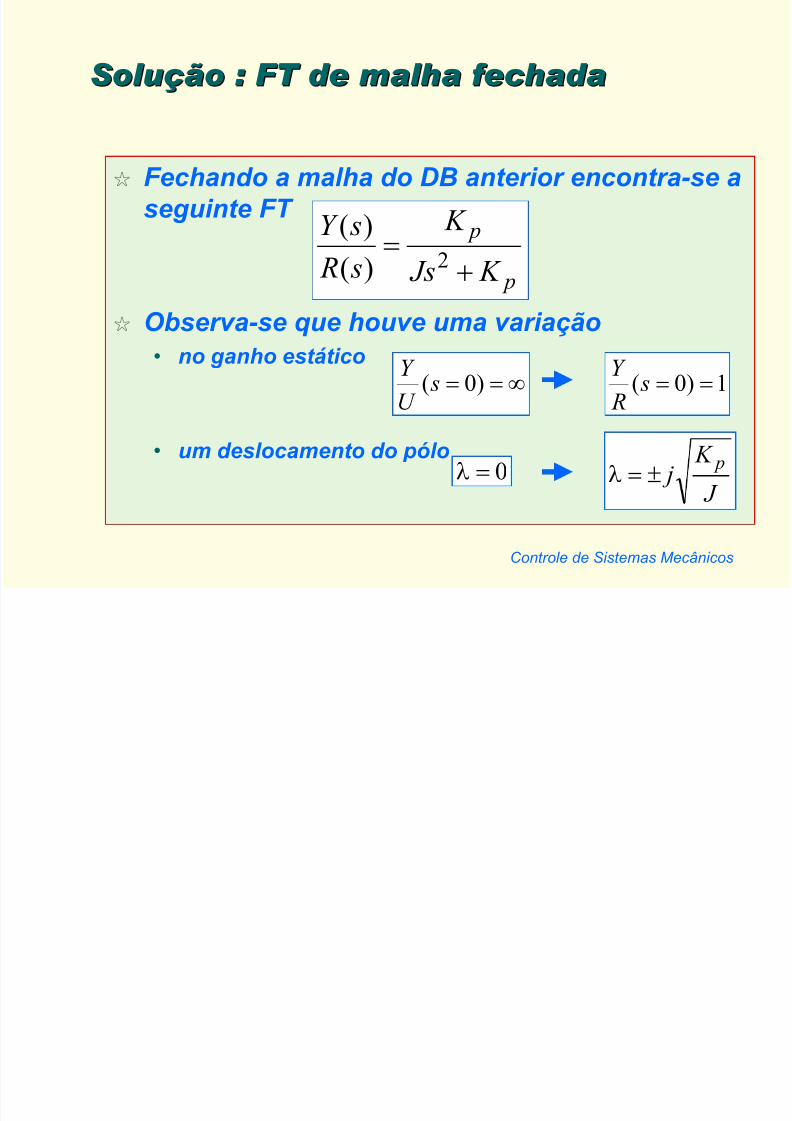
Solução : FT de malha fechadaSolução : FT de malha fechada
Fechando a malha do DB anterior encontra-se a
seguinte FT
Observa-se que houve uma variação• no ganho estático
• um deslocamento do pólo
1)0( == s R
Y
J
K j
p±=λ
∞== )0( sU
Y
0=λ
p
p
K Js
K
s R
sY
+=
2)(
)(
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 31/37
Controle de Sistemas Mecânicos
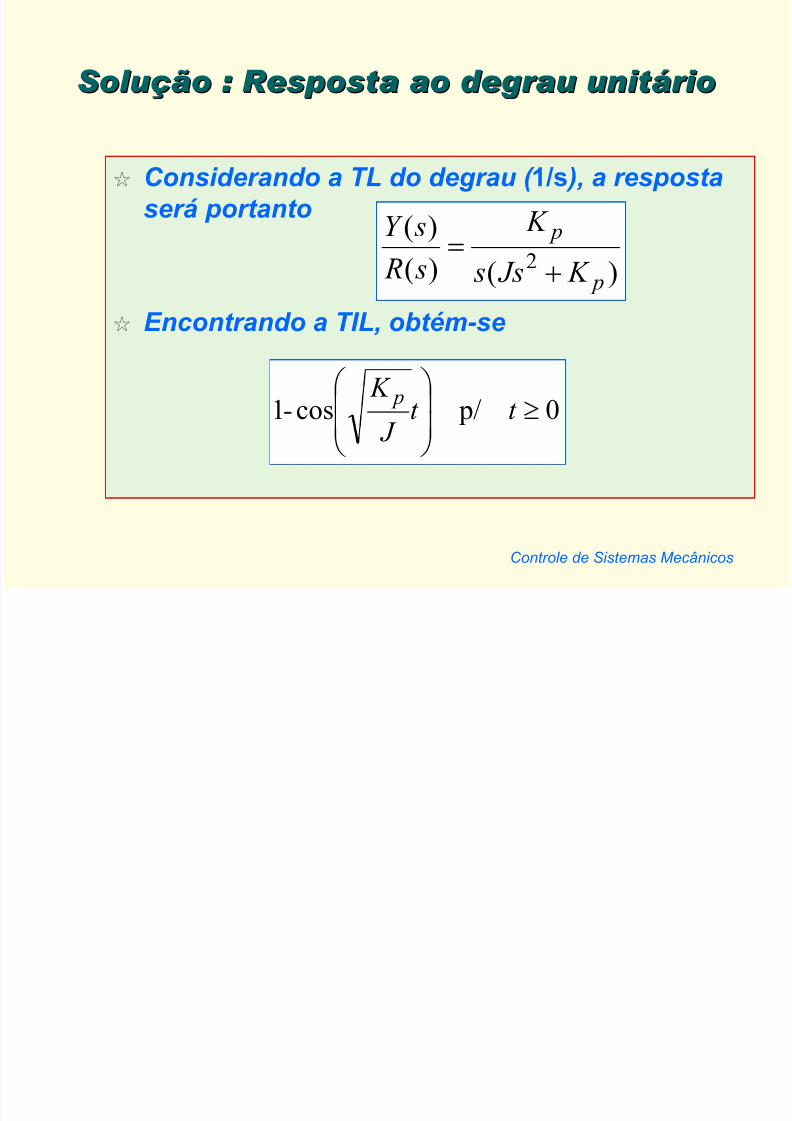
Solução : Resposta ao degrau unitárioSolução : Resposta ao degrau unitário
Considerando a TL do degrau ( 1/s ), a resposta
será portanto
Encontrando a TIL, obtém-se
0 p/cos1 ≥
t t J
K
-
p
)()(
)(2
p
p
K Js s
K
s R
sY
+=
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 32/37
Controle de Sistemas Mecânicos
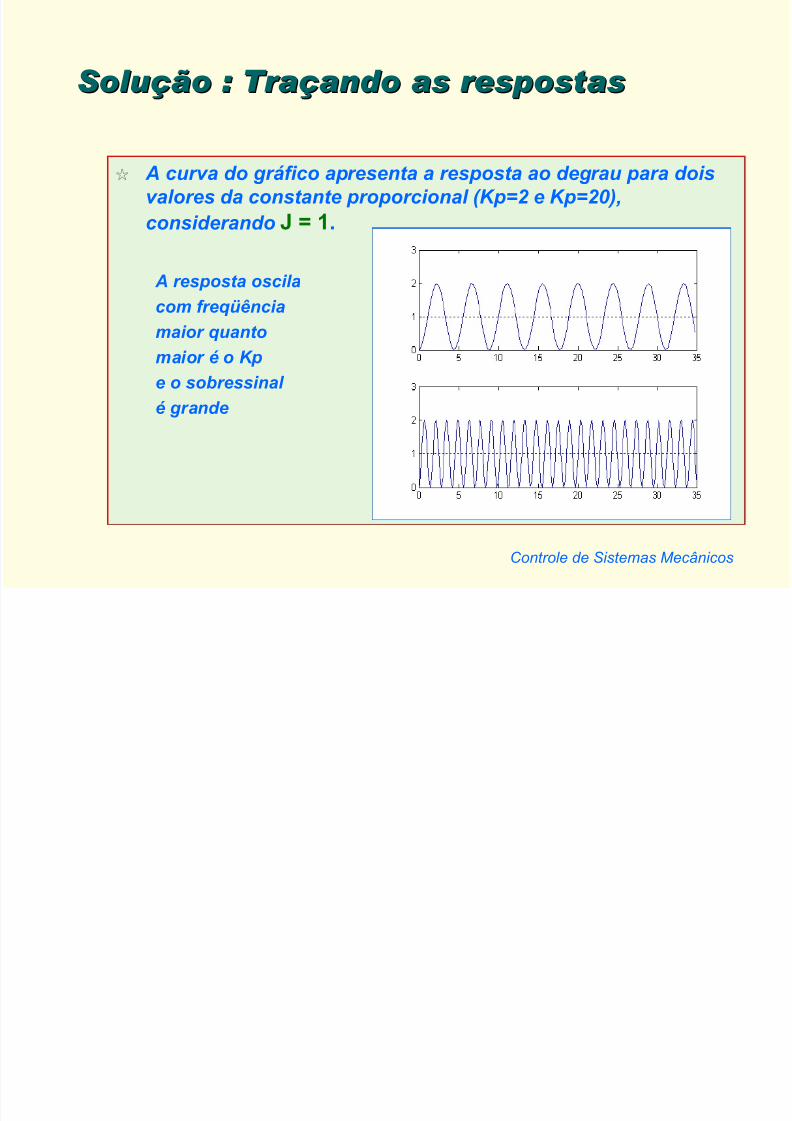
Solução : Traçando as respostasSolução : Traçando as respostas
A curva do gráfico apresenta a resposta ao degrau para dois
valores da constante proporcional (Kp=2 e Kp=20),
considerando J = 1.
A resposta oscila
com freqüência
maior quanto
maior é o Kp
e o sobressinal
é grande
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 33/37
Controle de Sistemas Mecânicos
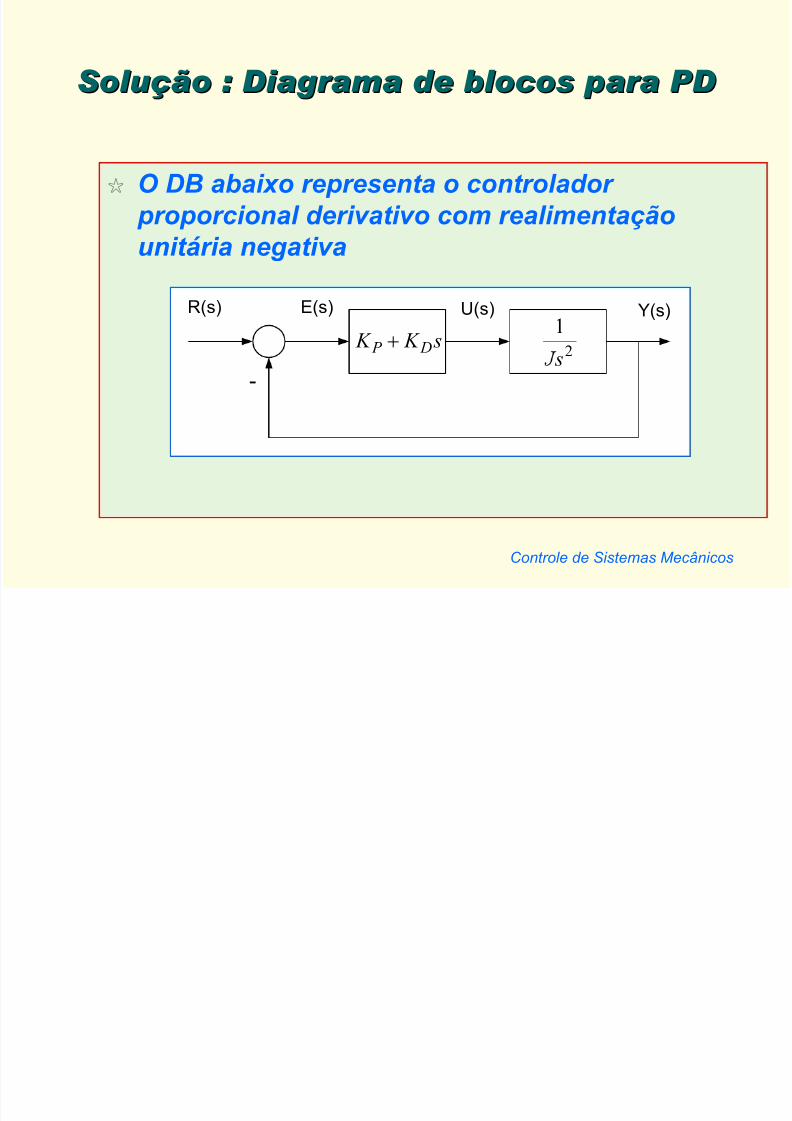
Solução : Diagrama de blocos para PD Solução : Diagrama de blocos para PD
R(s) E(s)U(s) Y(s)
-
s K K D P + 2
1
s
O DB abaixo representa o controlador
proporcional derivativo com realimentaçãounitária negativa
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 34/37
Controle de Sistemas Mecânicos
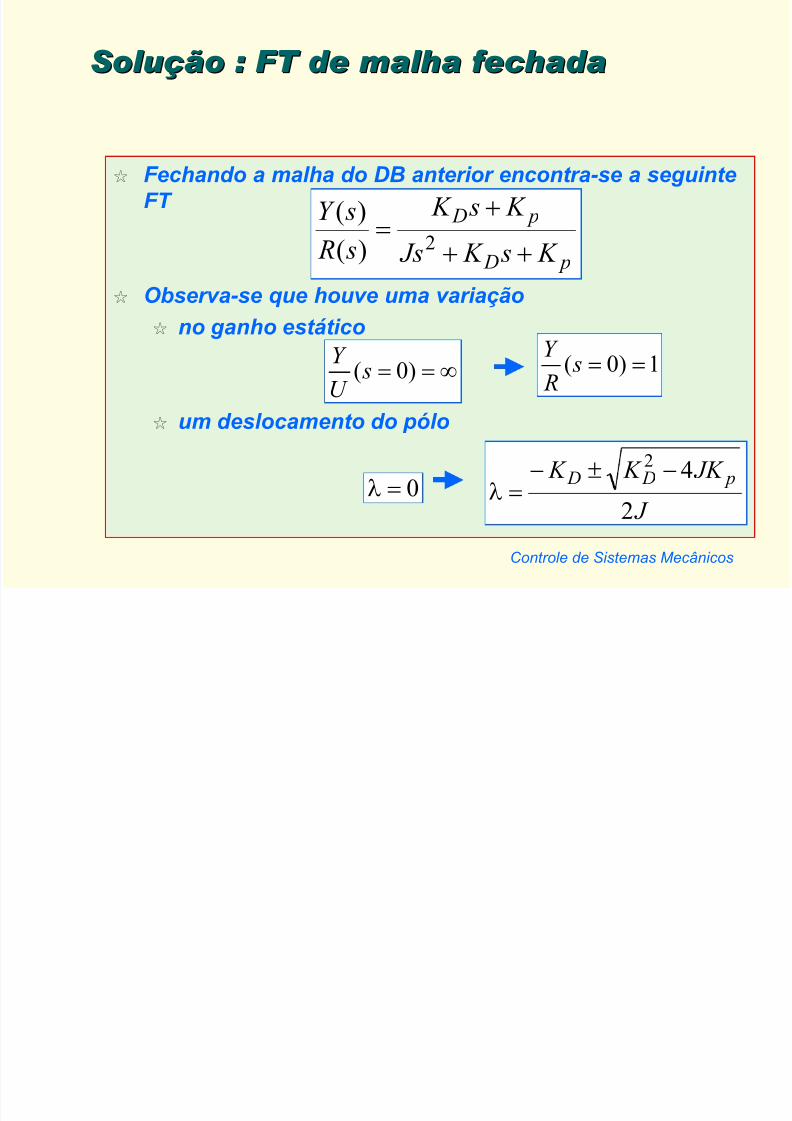
Solução : FT de malha fechadaSolução : FT de malha fechada
Fechando a malha do DB anterior encontra-se a seguinte
FT
Observa-se que houve uma variação
no ganho estático
um deslocamento do pólo
1)0( == s R
Y
J
JK K K p D D
2
42 −±−=λ
∞== )0( sU
Y
0=λ
p D
p D
K s K Js K s K
s R sY
+++= 2)(
)(

5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 35/37
Controle de Sistemas Mecânicos
Solução : Resposta ao degrau unitárioSolução : Resposta ao degrau unitário
)()(
)(
2 p D
p D
K s K Js s
K s K
s R
sY
++
+=
Considerando a TL do degrau ( 1/s ), a resposta
será portanto
Traçando a resposta ao degrau com o comando
step
Exercício: fazer o mesmo com o Simulink
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 36/37
Controle de Sistemas Mecânicos
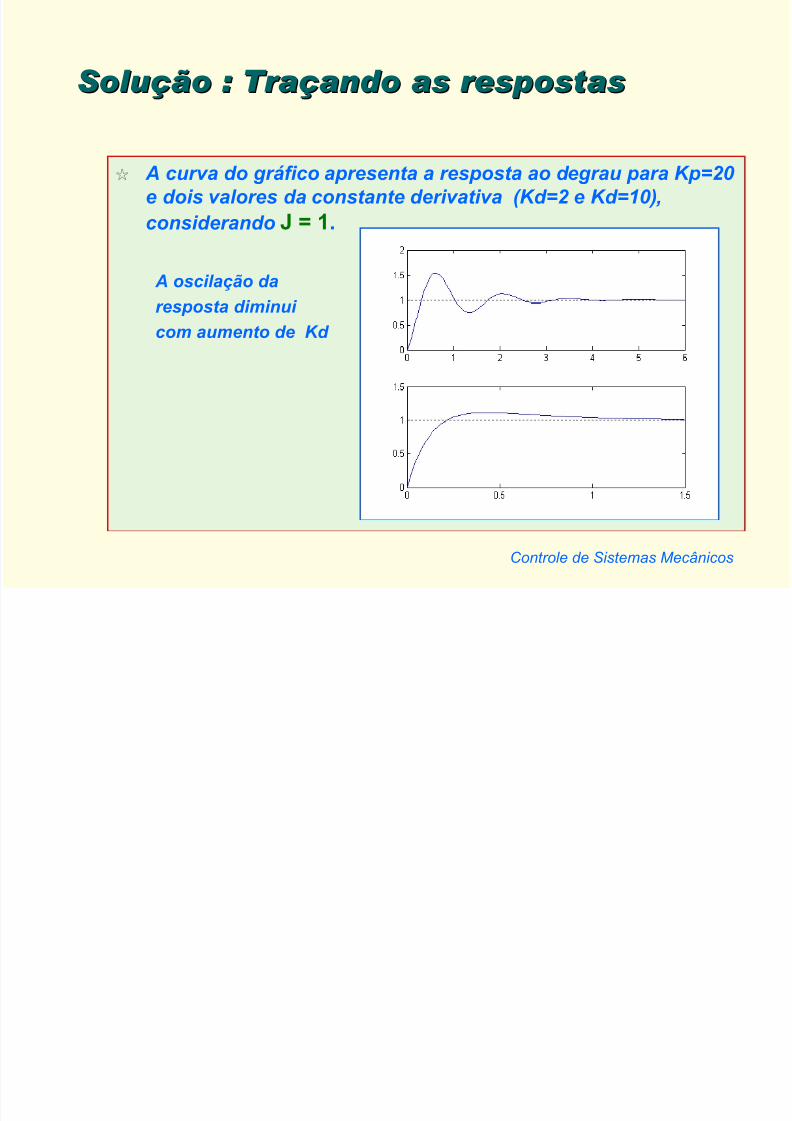
Solução : Traçando as respostasSolução : Traçando as respostas
A curva do gráfico apresenta a resposta ao degrau para Kp=20
e dois valores da constante derivativa (Kd=2 e Kd=10),
considerando J = 1.
A oscilação da
resposta diminui
com aumento de Kd
5/7/2018 Apostila Controle - 11 - Efeito dos Controladores - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-11-efeito-dos-controladores 37/37
Controle de Sistemas Mecânicos
ReferênciaReferência
Constantes de Erro
Ogata pg 400-402
Erro Estacionário
Ogata pg 227-233
Tipo do sistema
Ogata pg 227 Controlador Integral
Ogata pg 180