Ulrich Pinkall David Chubelaschwili
26
Elastic strips Ulrich Pinkall David Chubelaschwili DFG Research Center MATHEON Mathematics for key technologies May 1, 2010
Transcript of Ulrich Pinkall David Chubelaschwili
Elastic strips
Ulrich PinkallDavid Chubelaschwili
DFG Research Center MATHEON
Mathematics for key technologies
May 1, 2010
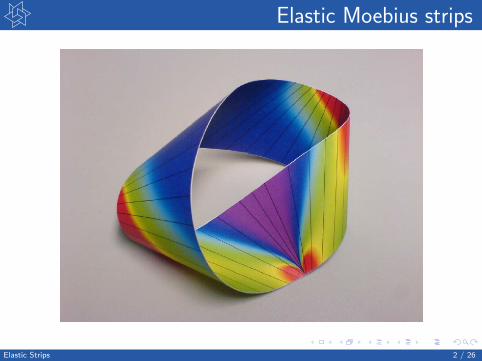
Elastic Moebius strips
Elastic Strips 2 / 26
Developpable strips
. Let γ : [0, L]→ R3 be an arclength parametrized curve with Frenetframe T ,N ,B . Assume that there is a smooth functionλ : [0, L]→ R such that the curvature and torsion of γ satisfy
τ = λκ.
. Then f : [0, L]× [−ε, ε]→ R3 defined by
f (s, t) = γ(s) + t(B(s) + λT (s))
parametrizes a developpable strip of width 2ε.
Elastic Strips 3 / 26
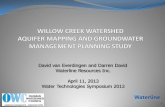
Developpable strips
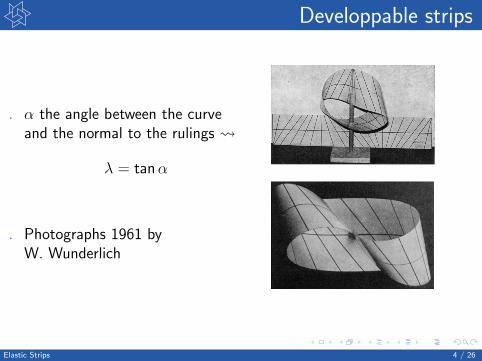
. α the angle between the curveand the normal to the rulings
λ = tanα
. Photographs 1961 byW. Wunderlich
Elastic Strips 4 / 26
Bending energy
. The bending energy
E =
∫H2dA
can be expressed as
E =
∫ L
0
κ2(1 + λ2)2log(1 + ελ′)− log(1− ελ′)
λ′ds.
. Wunderlich 1961
Elastic Strips 5 / 26
Elastic Moebius bands
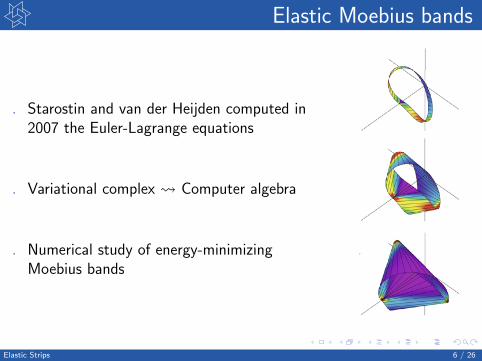
. Starostin and van der Heijden computed in2007 the Euler-Lagrange equations
. Variational complex Computer algebra
. Numerical study of energy-minimizingMoebius bands
Elastic Strips 6 / 26
Infinitesimally thin bands
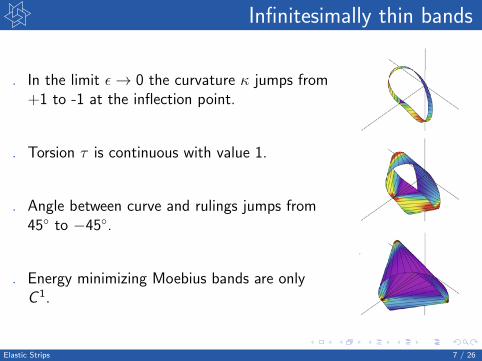
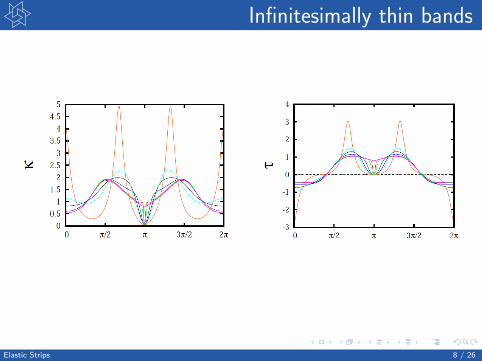
. In the limit ε→ 0 the curvature κ jumps from+1 to -1 at the inflection point.
. Torsion τ is continuous with value 1.
. Angle between curve and rulings jumps from45◦ to −45◦.
. Energy minimizing Moebius bands are onlyC 1.
Elastic Strips 7 / 26
Infinitesimally thin bands
Elastic Strips 8 / 26

Infinitesimally thin bands
. In the limit ε→ 0 the curvature κ jumps from+1 to -1 at the inflection point.
. Torsion τ is continuous with value 1.
. Angle between curve and rulings jumps from45◦ to −45◦.
. Energy minimizing Moebius bands are onlyC 1.
Elastic Strips 9 / 26
Sadowski functional
. In the limit ε→ 0 the energy becomes
E =
∫ L
0
κ2(1 + λ2)2ds.
. Introduced by Sadowski in 1930 as
E =
∫ L
0
(κ2 + τ 2)2
κ2ds.
. E has to be minimized among strips with fixed length Langrange multiplier µ in Euler-Lagrange equations.
Elastic Strips 10 / 26
Euler-Lagrange equations
Computed in 2005 by Hagan, subsequently corrected by Romingerand Chubelaschwili
0 = (κ′(1 + λ2)2 + 2κ(1 + λ2)λλ′)′
+κ
2(κ2(1 + λ2)2 − µ)
+ λκ(κ2(1 + λ2)2λ + (κ′
κ(1 + λ2)2λ))′ + (1 + λ2)2λ)′′)
0 = (κ2(1 + λ2)2λ + (κ′
κ(1 + λ2)2λ)′ + ((1 + λ2)2λ)′′)′
+ κλ(κ′(1 + λ2)2 + 2κ(1 + λ2)λλ′)
Elastic Strips 11 / 26
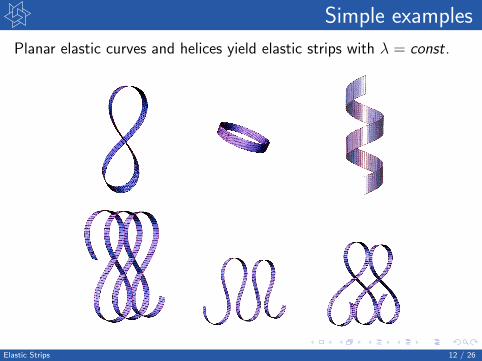
Simple examples
Planar elastic curves and helices yield elastic strips with λ = const.
Elastic Strips 12 / 26
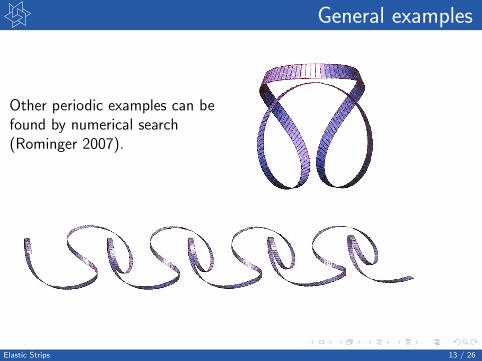
General examples
Other periodic examples can befound by numerical search(Rominger 2007).
Elastic Strips 13 / 26
Conservation laws
Theorem (Chubelaschwili 2009): A strip is elastic ⇔
the force vector
b =1
2(κ2(1 + λ2)2 + µ) T
+ (κ′(1 + λ2)2 + 2κ(1 + λ2)λλ′) N
− (κ2(1 + λ2)2λ + (κ′
κ(1 + λ2)2λ)′ + ((1 + λ2)2λ)′′) B
is constant.
Elastic Strips 14 / 26
Conservation laws
Theorem (Chubelaschwili 2009): For an elastic strip
the torque vector
a = 2κλ (1 + λ2) T
+1
κ(2κλ (1 + λ2))′N
+ κ (1 + λ2) (1− λ2) B
− b× γ
is constant.
Elastic Strips 15 / 26
Force-free elastic strips
. The force b and the torque a have to be applied to the end pointof the strip to keep it in equilibrium.
. They come from the boundary terms of the first variation formulaused to derive the Euler-Lagrange equations.
Definition: An elastic strip is called force-free if the force vector bvanishes.
. For force-free elastic strips the bending energy is critical even if theend point of γ is allowed to move, only the frame at the end pointis held fixed.
Elastic Strips 16 / 26
Force-free elastic strips
. No condition on end point of γ variational problem for the tangent image T
. For a force-free elastic strip the Lagrange multiplier µ is positive normalize to 1 by scaling.
. We are looking for critical points of
E = 1/2
∫ L
0
(κ2(1 + λ2)2 + 1)ds.
Elastic Strips 17 / 26
Tangent image of a strip
. For a force-free elastic strip κ does not vanish tangent image T is a regular curve in S2 of curvature λ:
T′ = +κN
N′ = −κT + κλB
T′ = −κλN
. ds = κ ds γ can be reconstructed from an arclengthparametrization of T as
γ(s) =
∫ s
0
1
κT ds.
Elastic Strips 18 / 26
Variational problem for tangent image
Theorem: Let T: [0, L]→ S2 be an arclength parametrized curvewith curvature λ. Then among all strips γ : [0, L]→ R3 with tangentimage T the one given by
γ(s) =
∫ s
0
(1 + λ2) T ds
has minimal Sadowski functional E and
E =
∫ L
0
(1 + λ2) ds.
γ has curvatureκ = 1/(1 + λ)2.
Elastic Strips 19 / 26
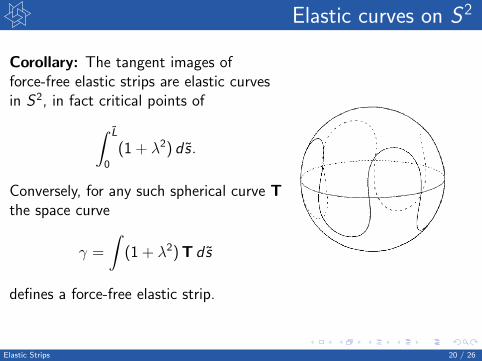
Elastic curves on S2
Corollary: The tangent images offorce-free elastic strips are elastic curvesin S2, in fact critical points of∫ L
0
(1 + λ2) ds.
Conversely, for any such spherical curve Tthe space curve
γ =
∫(1 + λ2) T ds
defines a force-free elastic strip.
Elastic Strips 20 / 26
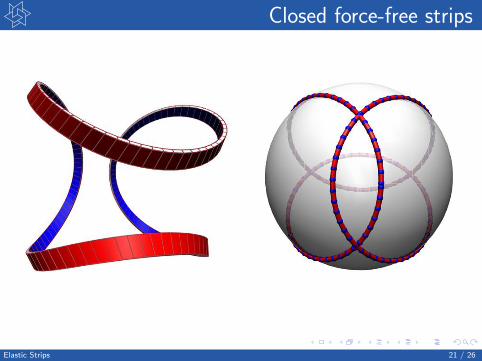
Closed force-free strips
Elastic Strips 21 / 26
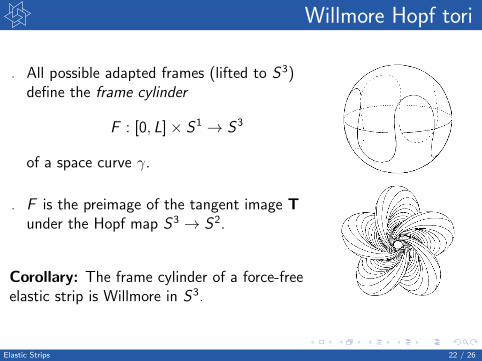
Willmore Hopf tori
. All possible adapted frames (lifted to S3)define the frame cylinder
F : [0, L]× S1 → S3
of a space curve γ.
. F is the preimage of the tangent image Tunder the Hopf map S3 → S2.
Corollary: The frame cylinder of a force-freeelastic strip is Willmore in S3.
Elastic Strips 22 / 26
Momentum strips
Given
. any arclength-parametrized spherical elastic curve B : [0, L]→ S2
without inflection points
. its unit normal T = B × B ′
. its curvature λ.
Then
γ : [0, L]→ R3
γ =
∫(1 +
1
λ2)T
defines an elastic strip.
Elastic Strips 23 / 26
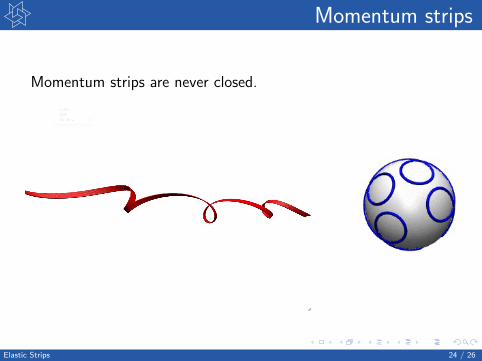
Momentum strips
Momentum strips are never closed.
Elastic Strips 24 / 26
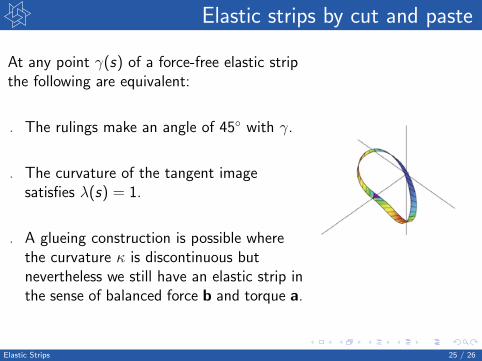
Elastic strips by cut and paste
At any point γ(s) of a force-free elastic stripthe following are equivalent:
. The rulings make an angle of 45◦ with γ.
. The curvature of the tangent imagesatisfies λ(s) = 1.
. A glueing construction is possible wherethe curvature κ is discontinuous butnevertheless we still have an elastic strip inthe sense of balanced force b and torque a.
Elastic Strips 25 / 26
Open questions
. Closed solutions by cut and paste?
. Stable ones?
. Moebius band?
. Other integrable classes of elastic strips?
. Maybe all elastic strips come from an integrable system?
. . .
Elastic Strips 26 / 26