%5BSolutions Manual%5D Fourier and Laplace Transform - Antwo
Upload
kis-zsomborCategory
view
266download
3
1
1
Prelucrarea semnalelor
Facultatea de Electronica si Telecomunicatii, martie 2007
2
Transformarea Laplace1. Raspunsul unui sistem liniar si invariant in timp la o exponentiala cu exponent complex
Trasformata Laplace generalizeaza ideea transformatei Fourier in tot planul complex.Pentru variabila complexa se utilizeaza notatia:
ω+σ= js (1.1)
Pentru σ=0 transformata Laplace este spectrul semnalului adica transformata Fourier.
ℜ∈ωℜ∈σ ,

2
3
Semnalul exponentiala complexa, cu exponent complex:
( ) ,000 tjtts eeetx ωσ ⋅== (1.2)
se aplica la intrarea unui SLIT caracterizat prin raspunsul la impuls h(t). La iesirea sistemului se obtine semnalul:
( ) ( ) ( )txthty ∗=
In ipoteza ca este convergenta, se noteaza cu H(s) integrala:
( ) ( ) ( ) ( ) ( )( )
( ) ( ) ( ) ( )0
00000
00
ss
stsjtj
tj
dehedehe
dehdtxhty
=
τ−∞
∞−
τω+σ−∞
∞−
ω+σ
τ−ω+σ∞
∞−
∞
∞−
τ⋅∫ τ⋅=τ⋅∫ τ⋅=
=τ⋅∫ τ=ττ−∫ τ=
( ) ( ) ( ) τ⋅⋅∫ τ=τ⋅∫ τ= ωτ−στ−∞
∞−
τ−∞
∞−deehdehsH js
(1.3)
-depinde numai de h(τ), -in anumite conditii caracterizeaza complet SLIT.
4
Raspunsul y(t) al SLIT :
( ) ( ) ( ) ( )00 0
s ty t e H s x t H s= ⋅ = ⋅ (1.4)
care ne arata ca :- este o functie proprie a SLIT,- H(s0) este valoarea proprie asociata ei.
Daca semnalul de intrare este o combinatie liniara de forma:
( ) ,∑=k
tsk
kectx (1.5)
Rezulta : ( ) ( ) ,∑=k
tskk
kesHcty
operatorul S care modeleaza sistemul fiind liniar.
Se poate vedea ca o functie H(s) definita prin expresia (1.3) permite calculul raspunsului unui SLIT la care semnalul de intrare poate fi pus sub forma (1.5).
(1.6)
tse 0

3
5
(1.7)
2. Transformarea Laplace bilateralaPrin definitie transformata Laplace bilaterala a unui semnal x(t) este:
( ){ }( ) ( ) ( ) ℜ∈ωσω+σ∫ ===∞
∞−
− , ;s ; jdtetxsstx stXL
Este o legatura usor de stabilit intre transformarea definita prin relatia (1.7) si transformarea Fourier:
( ){ }( ) ( )[ ] ( ){ }( )ω∫ ==ω+σ∞
∞−
σ−ω−σ− ttjt etxdteetxjtx FL (1.8)
Transformata Laplace bilaterala a unui semnal x(t) este transformata Fourier a semnalului x(t)e-σt .Daca σ=0, se obtine:
( ){ }( ) ( ) ( ){ }( ) ( )ω=ω=ω=ω Xtxjjtx FXL (1.9)
6
In loc de a scrie , se scrie (din ratiuni tipografice)( ){ } ( )stx XL =( ){ } ( )sXtx =L si prin urmare:
In continuare, vom nota cu X(s) transformata Laplace bilaterala, tolerand doua notatii pentru transformata Fourier sianume X(ω) cand este definita direct si X(jω) cand rezulta prin particularizarea transformatei Laplace bilaterale. Este, deci, evidenta echivalenta:
( ) ( ) ( )ω≡ω=ω= XjXsX js (1.10)
( ){ }( ) ( ) ( ){ }txjXjtx FL =ω=ω .
Notatii:

4
7
Exemple:1.) Consideram semnalul cauzal ( ) ( ).0 tetx tσ= ω− Transformatasa Fourier exista si este: ( ){ }( ) .1
0 ω+ω=ω
jtxF
Transformata Laplace bilaterala a semnalului x(t) este:
( ){ }( ) ( ) ( ) .0
00 ∫=∫ σ=∞ ω−σ+ω−−∞
∞−
ω− dteedtetestx tjtsttL
Integrala este convergenta numai pentru ω0+σ>0, deci σ> -ω0,care se mai scrie si Re{s}>- ω0. Avem deci:
( ){ }( ) { } .sRe ;110
00ω−>=σ
+ω=
ω+ω+σ=
sjstxL (1.11)
Se poate constata ca, daca -ωo < 0 atunci dreapta σ = 0, axa imaginara, este în domeniul de convergenta al transformatei Laplace bilaterale si:
( ){ }( ) ( ){ }( ) .0 ,10
0<ωω=
ω+ω=ω tx
jjtx FL
8
2.) Se considera semnalul anticauzal din Fig.1.1, avand expresia:( ) ( ) 0 , 0
0 >ω−σ−= ω− tety t
Fig.1.1 Semnal anticauzal, ce nu are transformata Fourier dar are transformata Laplace.
( ){ }( ) ( )
( ) . 0
0
0
dtee
dtetesty
tjt
stt
ω−
∞−
σ+ω−
−∞
∞−
ω−
∫−=
=∫ −σ−=L
Pentru ca integrala sa fie convergenta este necesar si suficient sa avem ω0+σ<0 sau σ < -ω0 . In aceste conditii:
( ){ }( ) ( ) ( )
sjeedteesty
tjttjt
+ω=
ω+σ+ω=∫−=
∞−
ω−σ+ω−ω−
∞−
σ+ω−
0
00 1
0
00L (1.12)

5
9
2.1 Proprietatile domeniului de convergenta (DC) al transformatei Laplace bilaterale
I. DC al transformatei Laplace bilaterale, daca exista, este format din benzi ale planului s paralele cu axa imaginara jω.II. DC al transformatei Laplace bilaterale nu poate contine nici un pol al acesteia.III. Daca x(t) are durata finita si daca exista cel putin o valoare s0din planul variabilei complexe pentru care transformata Laplace bilaterala converge, atunci domeniul de convergenta este intreg planul complex.IV. Daca x(t) este un semnal cu intindere spre dreapta (Fig.1.2) si daca dreapta de ecuatie Re{s}=σ0 este in domeniul de convergenta, atunci toate punctele s din planul complex ce satisfac Re{s}≥σ0 sunt in domeniul de convergenta. Semnalele cu intindere spre dreapta au domeniul de convergenta al transformatei Laplace bilaterale cu intindere spre dreapta.
10
x(t) x(t)
Fig.1.2 Semnal de durata infinita cu suportul nemarginit la dreapta.
Fig.1.3 Semnal de durata infinita cu suportul nemarginit la stanga.
V. Daca x(t) este un semnal cu intindere spre stanga (Fig.1.3) si daca dreapta de ecuatie Re{s}=σ0 este in domeniul de convergenta, atunci toate punctele s din planul complex ce satisfac Re{s}≤σ0sunt in domeniul de convergenta al transformatei Laplace bilaterale cu intindere spre stanga.
VI. Daca suportul semnalului x(t) este toata axa reala si daca dreapta de ecuatie Re{s}=σ0 este in domeniul de convergenta al transformatei Laplace bilaterale, atunci DC al acesteia este o banda paralela cu axa imaginara, continand dreapta Re{s}=σ0.

6
11
Exemple:1.) Semnalul de durata finita ( ) ( ) ( )[ ]Tttetx t −σ−σ= ω− 0 areTransformata Laplace bilaterala:
( ) ( )( )
00
00
1ω+
−=∫=ω+−
ω+−
sedtesH
TsT ts
Zerourile transformatei sunt ( ) .k,/20 ZTkjszk ∈π+ω−=Transformata are un singur pol sp=-ω0, compensat de zeroul k=0, sz0=-ω0. Asadar, X(s) are ca DC tot planul complex.
2.) Semnalul de durata infinita, cu suportul confundat cu axa reala , se poate scrie sub forma:( ) 0 , 0
0 >ω= ω− tetx( ) ( ) ( ),00 tetetx tt −σ+σ= ωω− egalitatea fiind valabila aproape
peste tot (cu exceptia punctului t=0).
12
Semnalul cu intindere spre dreapta are transformata Laplace:
( ){ } { } 00
sRe ,10 ω−>ω+
=σω−
ste tL
Semnalul cu intindere spre stanga are transformata Laplace:
( ){ } { } 00
sRe ,10 ω<ω−
−=−σω
ste tL
In consecinta:{ } { } 002
02
0
00sRe- ,2110 ω<<ω
ω−ω−=
ω−−
ω+=ω−
ssse tL
σω0-ω0
jω
Fig.1.4 DC pentru transformata semnalului exp(-ω0|t|).
Daca σ=0, rezulta:
{ }( )
.2220
20
20
200
ω+ωω=
ω−ωω−=ω−
je tF

7
13
2.2 Transformarea Laplace inversa
Transformarea Laplace bilaterala directa este o transformare Fourier directa aplicata semnalului x(t)e-σt, σ fixat, deci pe o paralela la axa jω.
Semnalul x(t)e-σt, σ fixat, poate fi recuperat prin transformarea Fourier inversa:
( ){ }( ) ( )[ ] ( ){ }( )ω∫ ==ω+σ∞
∞−
σ−ω−σ− ttjt etxdteetxjtx FL (1.8)
(1.13)
Integrala (1.13) se efectueaza pe o paralela dusa in planul s la axa jω (σ=cst in raport cu ω, ds=d(σ+jω)=jdω ),
( ) ( ){ } ( )1 12
t j tx t e X j X j e d∞
−σ − ω
−∞
= σ + ω = σ + ω ωπ ∫F
14
sau:(1.14)
Integrala se efectueaza pe o paralela la axa imaginara continuta in DC.
(1.7)( ){ }( ) ( ) ( ) ℜ∈ωσω+σ∫ ===∞
∞−
− , ;s ; jdtetxsstx stXL
Relatiile (1.7) si (1.14) definesc o pereche Laplace (bilaterala):( ) ( )sXtx ⎯→←L
(1.15)
Pentru determinarea transformarii inverse mai des se foloseste metoda descompunerii in fractii simple si se cauta functiile temporale in tabele.
( ) ( )∫π=
∞+σ
∞−σ
ωσ−j
j
tjt dsesXj
etx21
( ) ( ) ( ){ }( ) DC ,21 1 ∈σ=∫π
= −∞+σ
∞−σtsXdsesX
jtx
j
j
st L

8
15
Exemple:1.) Se cere sa se inverseze functia X(s)=1/[(s+2)(s+3)]. Daca DC nu este precizat problema este nedeterminata, avand 3 solutii posibile. In DC nu poate intra nici un pol. Se exclud asa cum se arata in Fig.1.5 dreptele σ=-2 si σ=-3. Se descompune X(s) in fractii simple:
(1.16)( ) .3
12
1+
−+
=ss
sXjω
Fig.1.5 Cele 3 DC posibile pentru X(s)=1/[(s+2)(s+3)].
i) Daca DC este 1, σ>-2, atunci fiecare termen al relatie (1.16) va fi inversat intr-un semnal cauzal:
( ) ( )tete tt σ→+
>σσ→+
−>σ −− 323s
1 : -3 ;2s
1 : 2
Rezulta: ( ) ( ).3s
12s
1 : 2 32 tee tt σ−→+
−+
−>σ −−(1.17)
16
jω
Fig.1.5
ii) Daca DC este 2, σ<-3, atunci fiecare termen al relatie (1.16) se inverseaza prin cate un semnal anticauzal:
( ) ( )tete tt −σ−→+
<σ−σ−→+
−<σ −− 323s
1 : -3 ;2s
1 : 2
Rezulta:( ) ( ).
3s1
2s1 : -3 32 tee tt −σ+−→
+−
+<σ −− (1.18)
iii) Daca DC este 3, -3<σ<-2 atunci rezulta:
semnal anticauzal: ( );2s
1 : -2 2 te t −σ−→+
<σ −
semnal cauzal: ( );3s
1 : -3 3 te tσ→+
>σ −
-3<σ<-2 : ( ) ( ).3s
12s
1 32 tete tt σ−−σ−→+
−+
−− (1.19)

9
17
-Aceiasi transformata Laplace bilaterala, (1.16) poate fi inversata in trei moduri distincte, dupa cum este ales DC.
Concluzii:
-Numai in cazul i) jω⊂DC si, prin urmare, numai pentru semnalul (1.17) exista transformata Fourier.
-Semnalele (1.18) si (1.19) desi au transformate Laplace bilaterale, nu au transformate Fourier, axa imaginara nefiind inclusa in DC. jω
Fig.1.5
(1.16)( ) .3
12
1+
−+
=ss
sX
18
2.3 Definirea transformatei Laplace bilaterale prin constelatia de poli si zerouri
Daca transformata Laplace bilaterala este o fractie rationala:
( )( )
( ),
1
10
∏ −
∏ −=
=
=N
kpk
M
kk
ss
ssKsX (1.20)
se observa ca este suficienta cunoasterea polilor spk si a zerourilor szk pentru a cunoaste, cu rezerva unei constante multiplicative K, pe X(s). Daca, in plus, se cunoaste si valoarea transformatei X(s) intr-un punct s0∈DC poate fi determinata si constanta K. Polii si zerourile pot fi dati prin valorile lor complexe sau printr-o diagrama a “constelatiei” de poli si zerouri, CPZ.

10
19
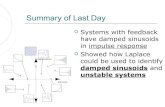
Fig.1.6 Constelatia de poli si zerouri a unei transformate Laplace
Exemplu de reprezentare a unei CPZ pentru o transformata Laplace bilaterala, X(s).
( ) ( )( )
( )25,64
5,1
,5,125,12
5,1
2 ++−=
++−+−=
sssKsX
jsjssKsX
Daca se specifica faptul ca x(t), semnalul temporal, este cauzal, atunci DC este σ>-2, situat la dreapta verticalei ce trece prin poli.
Deoarece axa jω este inclusa in DC exista si transformata Fourier a semnalului:
( ){ }( ) ( )( ) ( )( ).21
0
21
0
ppjspp sjsjsj
sssssstx
−ω−ω−ω=
−−−=ω
ω=
F
20
De unde:( ) ( ) ( ) 21
21jArgX ; ϕ−ϕ−ψ=ωΨ=ω
⋅=ω
APAPZA
jX
( ) ( )21
21
ϕ−ϕ−ψ
⋅=ω je
APAPZA
jX
Modulul si faza transformatei Fourier, pentru cazul general, se calculeaza cu relatiile:
( ) ( ) ∑ϕ−∑ψ+=ωΨ∏
∏=ω
==
=
= N
kk
M
kkN
kk
M
kk
ArgKAP
AZkjX
11
1
1 ; (1.21)
Fig.1.6
,0ψ=−ω jeZAsj
,111
ϕ=−ω jp eAPsj 2
2 2j
pj s P A e .ϕω− =

11
21
3. Transformarea Laplace unilateralaStudiul sistemelor cauzale ce nu sunt initial in starea de repaus (nu au conditii initiale nule) se face utilizand transformarea definita prin relatia:
( ){ }( ) ( ) .0
dtetxstx st−∞∫=+
uL (1.22)
Functiile (semnalele) complexe care satisfac conditiile:
i) sunt cauzale x(t)⋅σ(t)=x(t);ii) sunt continue cu exceptia eventual a unei multimi numarabile de puncte in care au discontinuitati de speta intai;iii) satisfac conditia:
( ) 0, 0,M , 00 ≥σ>≤ σ− tMetx
se numesc functii original iar σ0 este denumit indice de crestere a functiei.
22
Transformarea inversa este definita de:
( ) ( ){ } ( ) { } 0sRe ,21 σ>∫π
==∞+σ
∞−σ
j
j
stdsesXj
sXtx 1-uL (1.23)
Relatiile (1.22) si (1.23) definesc o pereche Laplace unilaterala si se scrie:
( ) ( )sXtx ⎯→← uL (1.24)
Transformata Laplace unilaterala (1.22) a unei functii original exista si este olomorfa (analitica) in semiplanul Re{s}>σ0.
( ){ }( ) ( ) .0
dtetxstx st−∞∫=+
uL (1.22)

12
23
3.1 Relatia dintre transformata Laplace bilaterala si transformata Laplace unilaterala
Pentru cazul semnalelor cauzale, intre cele doua transformate nu exista diferente. Fie x(t)=x(t)σ(t) la care se aplica transformarea bilaterala (1.7):
(1.7)( ){ }( ) ( ) ( ) ℜ∈ωσω+σ∫ ===∞
∞−
− , ;s ; jdtetxsstx stXLRezulta:
( ){ } ( ) ( ) ( ) ( ) ( ){ }.0
∫ ∫ ==σ=∫=∞
∞−
∞ −−−∞
∞−txdtetxdtettxdtetxtx ststst
uLL
Fie acum un semnal plasat si in domeniul t<0:
( ){ } ( ) ( ) ( ) ,0
0∫ ∫+=∫=∞−
∞ −−−∞
∞−dtetxdtetxdtetxtx stststL
In primul termen se pune t→-t si se obtine:
24
( ){ } ( ) ( ) ( ) ( ) ,0 0∫ ∫+−=∫=∞ ∞ −−−−∞
∞−dtetxdtetxdtetxtx stststL
sau:( ){ }( ) ( ){ }( ) ( ){ }( )stxstxstx −−+= uu LLL (1.25)
Transformata Laplace bilaterala este suma dintre transformata Laplace unilaterala a semnalului si transformata Laplace unilaterala reflectata (-s) a semnalului reflectat (-t).
In cazul transformarii unilaterale, specificarea domeniului de convergenta nu este necesara.
Transformata unilaterala se refera numai la partea din dreapta originii a oricarui semnal si, deci, domeniul de convergenta va fi un semiplan delimitat de o dreapta paralela cu axa imaginara, ce trece prin polul plasat in extrema dreapta, intinzandu-se spre dreapta.

13
25
4. Transformarea Laplace a distributiilorTransformata Laplace a unei distributii f∈S` poate fi definita utilizand transformata ei Fourier:
{ } { }.fef tσ−=FL (1.26)
Pentru distributia Dirac δ(t) se aplica definitia sub forma:
{ } ( ){ }.tet σ−δ=δ FL
Pentru ( ) ( ) ( )ttet δ=δ=δℜ∈σ∀ σ 0t-e , si, deci:
{ } ( ){ } .s ,1 Ct ∈∀=δ=δ FL (1.27)
Considerand distributia Dirac deplasata δ(t-t0) rezulta:
( ){ } ( ){ } .s ,000 Ceetttt stt ∈∀=−δ=−δ −σ−FL (1.28)
26
Pentru treapta unitara σ(t) se poate aplica direct definitia (1.7):(1.7)( ){ }( ) ( ) ( ) ℜ∈ωσω+σ∫ ===
∞
∞−
− , ;s ; jdtetxsstx stXL
Integrala este convergenta numai daca Re{s}>0, caz in care:
( ){ } ( ) .0∫=∫σ=σ∞ −−∞
∞−dtedtett ststL
( ){ } { } .0sRe ,1 >=σs
tL (1.29)
Daca treapta unitara este reflectata x(t)=σ(-t), atunci:
( ){ } ( ) { } .0sRe ,10<−=∫=∫ −σ=−σ
∞−
−−∞
∞− sdtedtett ststL
si, deci:( ){ } { } .0sRe ,1 <=−σ−
stL
{ } { } ( ){ } ( ){ } ( ){ } 0 ,1 ,1 =−σ−=σ=σ=δ=δ ts
tt uuu LLLLL
(1.30)
(1.31)

14
27
5. Proprietati ale celor doua tipuri de transformate LaplaceSe noteaza:
( ) ( )sXtx ⎯→← uL
( ) ( ) ;DCs y∈⎯→← sYty L
( ) ( ) ;DCs x∈⎯→← sXtx L
( ) ( )sYty ⎯→← uL
1. Liniaritatea:( ) ( ) ( ) ( ) putincel DCs x yDCsbYsaXtbytax ∩∈+↔+
( ) ( ) ( ) ( ).sbYsaXtbytax uu +↔+ (1.32)
2. Translatia in timp:( ) ( ) ,,DCs 0x0
0 tsXettx st ∀∈↔− −
( ) ( ) .0 000 >↔− − tsXettx u
stTeorema intarzierii:(1.33)
3. Modularea in timp:( ) ( ) 00 cu deplasat DCs 0 σ∈−↔ ssXtxe ts
( ) ( ).00 ssXtxe uts −↔
(1.34)
28
4. Scalarea variabilei timp:( ) .
as ,a,1 * DC
asX
aatx ∈ℜ∈⎟
⎠⎞
⎜⎝⎛↔
( ) .0a,1 >⎟⎠⎞
⎜⎝⎛↔
asX
aatx u
(1.35)
5. Teorema convolutiei:
( ) ( ) ( ) ( ) putin.cel DCs x yDCsYsXtytx ∩∈↔∗( ) ( ) ( ) ( ).sYsXtytx uu↔∗ (1.36)
6. Derivarare in timp:( ) ( ) putin. cel DCs ∈↔ ssX
dttdx
(1.37)( ) ( ) ( ).+↔ 0x-ssX
dttdx
u

15
29
7. Derivarare in domeniul variabilei s:
( ) ( ) DC. sds
sdXttx ∈↔−
( ) ( ) . ds
sdXttx u↔−(1.38)
8. Integrarea semnalului in domeniul timp:Fie y(t):
( ) ( ) ( ) ( ).ttxdxtyt
σ∗=τ∫ τ=∞−
Se deduce: ( ) ( ) .1s
sXsY ⋅=Cum (1/s) are DC Re{s}>0 rezulta:
( ) ( ) { }( ) putin cel 0sReDCs >∩∈↔τ∫ τ∞− s
sXdxt
( ) ( ) ( )( )sxsXdx u
t +−+↔τ∫ τ+
01
0
(1.39)( ) ( ) sau
0 ssXdx u
t↔τ∫ τ
+
daca exista un impuls in origine. x(-1) (0+) - valorarea integralei in origine.
30
9. Teorema valorii initiale a unui semnal cauzal:
10. Teorema valorii finale a unui semnal cauzal:
Pentru semnalul cauzal x(t)=x(t)σ(t), cele doua transformate sunt identice X(s)≡Xu(s).
Semnalul x(t) fiind cauzal: x(t)=x(t)σ(t), avem: X(s)≡Xu(s).
( ) ( ) ( )ssXssXx usslimlim0
∞→∞→
+ == (1.40)
( ) ( ) ( ) ( )ssXssXtxxs
ust
limlimlim00 →→∞→
===∞ (1.41)

16
31
6. Studiul sistemelor liniare si invariante in timp prin intermediul transformarii Laplace
6.1 Functia de sistem a unui SLIT
Pentru un SLIT: y(t)=h(t)∗x(t). Aplicand transformarea Laplace bilaterala rezulta:
( ) ( ){ }( ).sthsH L= (1.42)
H(s)X(s) Y(s)=X(s)H(s)h(t)x(t) y(t)=x(t)*h(t)
Fig.1.7a SLIT caracterizat de raspunsul la impuls h(t).
Fig.1.7b SLIT caracterizat de functia de sistem H(s).
Raspunsul la impuls caracterizeaza complet comportarea unui SLIT in domeniul timp, iar functia H(s), caracterizeaza complet comportarea sa in domeniul complex.Denumiri pentru H(s): - functie (de) sistem sau functie de transfer.
( ) ( ) ( ) ;sXsHsY ⋅=
32
Fie un SLIT stabil. Atunci exista F{h(t)}(ω)=L{h(t)}(jω) si, deci axa imaginara este in DC al functiei sistem H(s).
Fig.1.8 Raspunsul la impuls h(t) al unui sistem necauzal si functia de sistem H(s) impreuna cu domeniul ei de convergenta, DC.
Fig.1.9 Raspunsul la impuls h(t) al unui sistem cauzal si functia de sistem H(s) impreuna cu domeniul ei de convergenta, DC.
-F{h(t)}=H(ω)=-1/(ω0+jω)
F{h(t)}=1/(ω0+jω)
Conditia de convergenta: Re{s}<-ω0
Conditia de convergenta: Re{s}>-ω0
Exemplu:

17
33
6.2 Determinarea raspunsului unui sistem liniar si invariant in timp utilizand transformarea Laplace
Fiind dat semnalul x(t), se determina X(s). Se determina Y(s)=X(s)H(s). Prin transformare inversa rezulta y(t).
Fig.1.10 Semnalul cauzal x(t) poate fi considerat ca repetare la infinit a primului sau segment, avand suportul [0,T].
La intrarea unui sistem cauzal, h(t)↔H(s)=Hu(s), se aplica semnalul x(t).
( ) ( ) ( ) ( )[ ].0 Ttttxtx −σ−σ=
( ) ( ) ( ) ( ).0
00
0 kTtxkTttxtxkk
−∑=∑ −δ∗=∞
=
∞
=
( ){ } ( ) ( ) ( ),000
00 sXsXdtetxtx ustT
==∫= −uLDaca se noteaza:
(1.43)
(1.44)
(1.45)
34
din (1.44) rezulta:( ){ } ( ){ } ( ){ } ( ) { } .0sRe ,
00
00 >∑=∑ −δ=
∞
=
−∞
= k
skTu
kesXkTttxtx uu LLL
sau formula lui Weidelich:
( ) ( ) { } .0Re ;1
0 >−
= − se
sXsX sTu
u
Pentru a determina semnalul de la iesire, se calculeaza:
(1.46)
( ) ( ) ( ) ( ) ( ).1
0sT
uuuuu e
sXsHsXsHsY −−== (1.47)
Admitand ca sistemul considerat este descris de o ecuatie diferentiala, solutiei generale a acesteia ii corespunde componenta de regim permanent (stationar) a lui y(t) iar solutiei sale particulare ii corespunde componenta de regim tranzitoriu a lui y(t):
( ) ( ){ } ( ) ( ).1 tytysYty struu +== −L (1.48)

18
35
Aplicand transformata Laplace, rezulta:(1.49)( ) ( ) ( ).sYsYsY truuSu −=
Daca y0S(t)= yS(t)[σ(t)-σ(t-T)] atunci, conform formulei (1.46):
( ) ( )( ).10sT
SuSu esYsY −−=Se tine seama de (1.46) si (1.47) si se obtine:
( ) ( ) ( ) ( )( );100sT
truuSu esYsHsXsY −−−= (1.50)
( ) ( ){ }.01
0 sYty Suus−= L (1.51)
Se observa ca, pe baza formulei lui Weidelich, poate fi determinata transformata Laplace a raspunsului unui sistem cauzal la un semnal periodic cauzal doar observand comportarea temporala a acestui semnal in prima sa perioada.
36
Exemplu:
Fig.1.11 (a) Circuit RC; (b) Semnalul aplicat la intrarea circuitului RC.
( ) { } .Re;1; ccc
cu s
RCssH ω−>=ω
ω+ω=
( ) ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛−=
−2
0 11sT
u es
sX
Aplicand formula lui Weidelich se obtine:
( ) ( ) .
1)(1)(
1
2
2
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛+ω+
ω=−ω+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛−ω
=−
−
−
sT
c
csT
c
sT
c
u
essess
e
sY
Componenta tranzitorie este cauzata de polul -ωc, deci:
( ) ( )( )[ ] .
1
1;2Tscu
ctru
cc
e
ssYAs
AsY ωω−=
+
−=ω+=ω+
=
Se cere raspunsul de regim permanent (stationar).

19
37
Conform relatiei (1.50) se determina Y0Su(s):
( )
2
0
2
11 1
1c
sT
csT
Su Tc c
eeY s .
s( s ) se
−
−
ω
⎛ ⎞⎜ ⎟ω −⎜ ⎟ −⎝ ⎠= + ⋅+ ω + ω
+
( ) 20
2
1 1 1 1 1 1
1c
sT sT
Su Tc c c c
eY s e .s s s s s s
e
−−
ω
⎛ ⎞⎛ ⎞= − − − + ⋅ −⎜ ⎟⎜ ⎟ ⎜ ⎟+ ω +ω +ω +ω⎝ ⎠ ⎝ ⎠+
Rezulta prin inversare:
( ) ( ) ( ) ( ) ( ) ( )[ ],1
12
112
20 Ttete
e
Ttetety TttT
Ttt
Scc
c
cc −σ−σ
+
+⎟⎠⎞
⎜⎝⎛ −σ
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡−−σ−= −ω−ω−
ω
⎟⎠⎞
⎜⎝⎛ −ω−
ω−
si:( ) ( ) ( ).0 ttyty TSS δ∗= (raspunsul de regim stationar)
38
6.3 Sisteme liniare si invariante in timp caracterizate prin ecuatii diferentiale liniare cu coeficienti constanti
Fie SLIT caracterizat prin ecuatia diferentiala:
( ) ( ) ,0 000
≠∑=∑==
adt
txdbdt
tyda k
kM
kk
N
k k
k
k (1.52)
cu conditii initiale nenule.Aplicand transformata Laplace bilaterala, rezulta:
( ) ( ).00
sXsbsYsa kM
kk
N
k
kk ∑=∑
==
Functia de sistem H(s)=Y(s)/X(s):
(1.53)
( ) ( )( ).
0
0sDsN
sa
sbsH N
k
kk
M
k
kk
=∑
∑=
=
= (1.54)

20
39
Radacinile ecuatiei:
dau polii sistemului, spk, in numar de N, incluzand si ordinele de multiplicitate:Radacinile ecuatiei:
dau zerourile sistemului, s0k, in numar de M, incluzand si ordinele de multiplicitate:
( ) ,00
=∑==
N
k
kk sasD (1.55)
( ) ,00
=∑==
M
k
kk sbsN (1.56)
Se presupune ca sistemul este cauzal (h(t)σ(t)= h(t)), asadar: Hu(s)=H(s)=Lu{h(t)}=L{h(t)}.Teorema valorii initiale a unui semnal cauzal, aplicata raspunsului la impuls (si el cauzal), conduce la:
( ) ( ) ( ) ( )( ) .limlimlim0sDssNsHssHsh
ssu
s ∞→∞→∞→
+ =⋅=⋅= (1.57)
40
Daca h(0+) este finit, deci nu exista impulsuri Dirac in origine, atunci se poate deduce ca M+1≤N. Tinand seama de forma expresie(1.54), avem:
Daca M+1>N, atunci limita nu poate fi finita. Ramane, in consecinta: h(0+)<∞, M+1≤N, M≤N-1.Gradul numaratorului unei functii sistem ce nu are impulsuri Dirac in origine este cel putin cu o unitate mai mic decat al numitorului.Daca M+1>N expresia lui h(t) prezinta impulsuri Dirac in origine.Exemplu:
( ) 1
1112
++=
++=
ssssHu ( ) ( ) ( ).tetth tσ+δ= −
( )1 2
1 1 01
1 1 00
M MM M
N Ns N N
b s b s b s b sh lim .
a s a s a s a
++ −
−→∞ −
+ + + +=
+ + + +……

21
41
In mod normal numarul polilor unei functii sistem intrece cel putin cu o unitate numarul zerourilor ei.Polii unui sistem stabil sunt plasati doar in semiplanul stang, iar zerourile sale pot fi plasate oriunde.Sistemele ce au atat polii cat si zerourile plasate in semiplanul stang se numesc sisteme de faza minima.Exemplu. Fie: ( ) ( ) ( ) .
11+
=↔σ= −s
sHteth ut
( ) ( ),1/1 ω+=ω jH ( ) ,1/1 2ω+=ωH ( ) .ω−=ωΦ arctgRaspunsul in frecventa al acestui sistem este:
Si fie sistemul cu raspunsul in frecventa:
( ) ( ) ( ) ( )00 0
00 0
0
0
11 1 1 2
1 11
ttj
H h t e e t ,j j
−ω−ω ω
ω−ω ⎡ ⎤ω = ↔ = ω + − ω σ⎣ ⎦ω+ ω ω −+ω
42
Se poate observa ca cel de al doilea sistem are acelasi modul ca si sistemul cu functia H(ω).Functia sa faza-frecventa este:
( ) ( ) .2200
0 ωω−ωΦ=
ωω−ω−=ωΦω arctgarctgarctg
Fig.1.12 Functie sistem si domeniul ei de convergenta, DC.
Functia sistem corespunzatoare lui hω0(t):( ) ( )( ).1 0
00 ss
ssH u +ω+−ω=ω
( ) .1
1s
sHu +=
( ) ( ),0
sHsH uu =ω ( ) ( ).0
ωΦ>ωΦω
( ) ( )ωΦ=ωΦ⇒∞→ω ω0 0
Prin urmare Hu(s)=1/(1+s) neavand nici un zero in semiplanul drept, corespunde unui sistem ce introduce un defazaj minim in comparatie cu alte sisteme (cauzale) ce au aceasi caracteristica |H(ω)|.

22
43
Teorema valorii finale a unui semnal cauzal, aplicata raspunsului la impuls (cauzal), conduce la:
( ) ( ) ( ) ( )( ) .limlimlim
000 sDssNssHssHh
ssu
s →→→===∞
Daca sistemul este stabil, h(∞)=0 si, prin urmare D(0)≠0.
Sistemele cauzale si stabile nu pot avea poli in origine. Acest rezultat este in concordanta cu faptul ca toti polii lui H(s) sunt in semiplanul stang. In acest caz teorema valorii finale nu aduce nici o informatie suplimentara.
44
Contributia polilor unui sistem cauzal la raspunsul la impuls al acestuia
Functia de sistem Hu(s) (1.54) pentru un sistem cauzal,
( ) ( )( ).
0
0sDsN
sa
sbsH N
k
kk
M
k
kk
=∑
∑=
=
= (1.54)
poate fi descompusa in fractii simple si pusa sub forma:
( ) ;1
∑−
==
N
k pk
ku ss
AsH ( )( ) ,pksspkuk sssHA
=−= (1.58)
daca toti polii sunt simpli. Forma lui h(t) este atunci:
( ) ( ).1
teAthN
k
tsk
pk σ⎟⎠⎞
⎜⎝⎛∑==
(1.59)
Deosebim doua cazuri: i) spk∈ℜ si ii) spk∉ℜ. Cum coeficientii ak si bk in ecuatia (1.54) sunt reali, rezulta ca polii complecsi nu pot aparea decat in perechi complex conjugate.

23
45
Pentru un sistem cauzal, stabilitatea stricta este intodeauna asigurata daca polii sunt in semiplanul stang. Daca polii sunt pe axa imaginara atunci sistemul este stabil la limita doar daca ei sunt simpli. Pentru o singura pereche de poli complex conjugati plasati pe axa imaginara se obtine un oscilator sinusoidal.
Plasarea unui pol al unui sistem cauzal in semiplanul drept, chiar daca este simplu da nastere unui sistem instabil.
Polii plasati in semiplanul stang dau o componenta tranzitorie ce se amortizeaza. Raspunsul permanent, ce se mentine cu aceleasi caracteristici in timp este contributia exclusiva a polilor simpli situati pe axa imaginara.
46
Calculul raspunsului unui sistem caracterizat printr-o ecuatie diferentiala
( ) ( ) ,0 000
≠∑=∑==
adt
txdbdt
tyda k
kM
kk
N
k k
k
k (1.52)
Exemplu. Se considera un sistem de tip cauzal, caracterizat de ecuatia diferentiala:
( ) ( ) ( ) ( ),232
2txty
dttdy
dttyd =++ (1.60)
avand conditiile initiale y(0+)=2 si y’(0+)=-2. Fie: x(t)=4σ(t)
( ) ( );sYty u↔ ( ) ( ) ( ).0' +−↔ yssYty u (1.61)
( ) ( ) ( )[ ] ( ).00 ++ ′−−↔′′=′′ yyssYsyy u (1.62)
( )s
t 44 ↔σ

24
47
( )[ ] ( )[ ] ( ) .422322s
sYssYssYs uuu =+−++− (1.63)
( ) ( ) .2
21
2223442
2
2
++
+−=
++++=
sssssssssYu (1.64)
( ) ( ) ( ) ( ) ( ) ( )teetetetty tttt σ+−=σ+σ−σ= −−−− 22 222222 (1.65)
Se pot verifica conditiile initiale:
( ) ( ) .2222222limlim 2
00=+−=+−= −−
→→ ++
tt
tteety
( ) 0 t,42 2 >−=′ −− tt eety
( ) ( ) .24242limlim 2
00−=−=−=′ −−
→→ ++
tt
tteety
48
Sisteme de ordinul intai( ) ( ) ( ) 0 000 >ωω=ω+ txKty
dttdy (1.66)
( ) ( ) { } .Re 00
0 ω−>ω+ω== s
sKsHsH u (1.67)
Fig.1.13 CPZ pentru un sistem de ordinul intai.
Sistemul:- este stabil, are raspunsul la impuls de tip exponential, polul fiind real.
( ) ( ) . ;1 ϕ−=ωΦ=ωPA
H
( ) ↓ω↑⇒↑ω HPA ,
(1.68)
Caracteristica de modul este o functie para: .PAAP =′
Caracteristica de faza este o functie impara.
( ) ( ) /2).-( /2)( , π→ωΦ↓ωΦ⇒π→ϕ↑ϕ↑ω
Frecventa ω este definita de pozitia punctului A pe axa imaginara.

25
49
Sisteme de ordinul doi
Fig.1.14 a) CPZ pentru un sistem de ordinul doi avand o pereche de poli complex
conjugati.
Fig.1.14 b) CPZ pentru un sistem de ordinul doi avand poli reali.
( ) ( ) ( ) ( ),2 20
2002
2txKty
dttdy
dttyd ω=ω+ξω+ ( ) ( ) .
2 200
2
20
ω+ξω+ω==
ssKsHsHu
0 ,12002,1 <ξ−ξω±ξω−=s
a) Frecventa de oscilatie este: 20 1 ξ−ω
01 ω=OPPunctul A defineste o frecventa:
( ) ( ) 1 21 2
1 H ;P A P A
ω = Φ ω = −ϕ −ϕ⋅
b) ξ>1, cei doi poli sunt plasati pe axa reala.
( ) 0P P , 21 →ω⇒∞→∞→ω HAsiA
( ) π−→ωΦ⇒π→ϕϕ∞→ω2
; 21si
Daca ξ=1, cei doi poli se confunda, in punctul -ω0 de pe axa reala.
50
Sistemul “trece tot”( ) .
0
0ω+ωω−ω=ω
jjH ( ) ( ) .
0
0sssHsHu +ω
−ω== (1.72)(1.71)
-ω0 ω0
jω
σ
A
ψ
Zϕ ϕ
ZAPA =π=ψ+ϕ
Fig.1.15 CPZ pentru un sistem “trece tot”
Fig.1.16 Caracteristica de faza Φ(ω) a unui sistem “trece tot”
( ) ,1==ωPAZA
H ( ) ϕ−π=ϕ−ψ=ωΦ 2
Daca se aplica o sinusoida unui sistem “trece tot”, ea nu isi modifica amplitudinea ci numai faza, conform caracteristicii Φ(ω).
Atunci cand ω=0, deci A≡0, ϕ=0 si defazajul introdus de circuit este π. Pentru OA=ω0, triunghiul AOP este isoscel, deci ϕ=π/4. Rezulta Φ(ω0)=π-2π/4=π/2.

26
51
Functia sistem echivalenta unor sisteme conectate in serie si paralel
Fig.1.17 a) Doua sisteme conectate in serie si sistemul echivalent.
Fig.1.17 b) Doua sisteme conectate in paralel si sistemul echivalent.
( ) ( ) ( ).21 sHsHsHe += (1.74)
( ) ( ) ( )thththe 21 ∗=
( ) ( ) ( ).21 sHsHsHe ⋅= (1.73)
52

27
53
54

28
55