Resumen TEMA 6: Momentos de inercia - tecnun.es · Cálculo del momento de inercia respecto a una...
5
TEMA 6: Momentos de inercia Mecánica 1 © TECNUN, 2006 Resumen TEMA 6: Momentos de inercia 1. Definiciones Sistema material de N puntos materiales de masa m i , i = 1, 2, ..., N. a) Momento de inercia respecto de un plano π π = =Σ N 2 i i i1 I md (d i = distancia de la masa m i al plano π) b) Momento de inercia respecto de una recta e = =Σ N 2 e i i i1 I md (d i = distancia de la masa m i a la recta e) c) Momento de inercia respecto de un punto O = =Σ N 2 O i i i1 I md (d i = distancia de la masa m i al punto O) d) Producto de inercia respecto a dos planos que se cortan, π, λ πλ = =Σ δ N i i i i1 I md (d i = distancia de la masa m i al plano π) (δ i = distancia de la masa m i al plano λ) 2. Relaciones entre los momentos de inercia a) π λ = + e I I I e es una recta cualquiera λ, π son dos planos ortogonales ente si que se cortan en la recta e b) π = + o e I I I O es un punto cualquiera π un plano que contiene a O e la recta perpendicular a π en O c) π λ ϕ = + + o I I I I π, λ, ϕ, son tres planos ortogonales si se cortan en el punto O 3. Teoremas de Steiner a) = + 2 e e' I I Md e’ es la recta paralela a e que pasa por el centro de masas d es las distancia entre ambas rectas
Transcript of Resumen TEMA 6: Momentos de inercia - tecnun.es · Cálculo del momento de inercia respecto a una...

TEMA 6: Momentos de inercia Mecánica 1
© TECNUN, 2006
Resumen TEMA 6: Momentos de inercia
1. Definiciones Sistema material de N puntos materiales de masa mi, i = 1, 2, ..., N. a) Momento de inercia respecto de un plano π
π == Σ
N2
i ii 1I m d (di = distancia de la masa mi al plano π)
b) Momento de inercia respecto de una recta e
== Σ
N2
e i ii 1I m d (di = distancia de la masa mi a la recta e)
c) Momento de inercia respecto de un punto O
== Σ
N2
O i ii 1I m d (di = distancia de la masa mi al punto O)
d) Producto de inercia respecto a dos planos que se cortan, π, λ
πλ == Σ δ
N
i i ii 1I m d (di = distancia de la masa mi al plano π)
(δi = distancia de la masa mi al plano λ)
2. Relaciones entre los momentos de inercia a) π λ= +eI I I e es una recta cualquiera
λ, π son dos planos ortogonales ente si que se cortan en la recta e
b) π= +o eI I I O es un punto cualquiera
π un plano que contiene a O e la recta perpendicular a π en O
c) π λ ϕ= + +oI I I I π, λ, ϕ, son tres planos ortogonales si se cortan en el punto O
3. Teoremas de Steiner a) = + 2
e e'I I Md e’ es la recta paralela a e que pasa por el centro de masas d es las distancia entre ambas rectas

TEMA 6: Momentos de inercia Mecánica 1
© TECNUN, 2006
b) = + 2o GI I Md G es el centro de masas del sistema
d = OG (distancia entre O y G) c) πλ π λ= + δ' 'I I Md π’, λ’, son los planos paralelos a π y λ respectivamente
que pasan por G. d es la distancia entre π y π’ (con su signo)
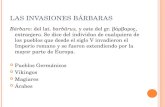
4. Expresión analítica del momento de inercia a una recta cualquiera
n vector unitario paralelo a la recta. Entonces di = modulo )( nri ∧ , luego
[ ]1 1
). ) ( )= =
= ∧ ∧ = ∧ ∧∑ ∑ i
N N
e i ii i
I m ( ( m .i i ir n r n n r n r
si: = α + β + γ n i j k α + β + γ =2 2 2( ) 1 Y: = + + i i ix y zir i j k Haciendo operaciones (hágalas) resulta que:
= α + β + γ − αβ − αγ − βγ2 2 2e x y z xy xz yzI I I I 2I 2I 2I (1)
donde: • x y zI , I , I son los momentos de inercia respecto los ejes x, y, z
• =
=∑N
xy i i ii 1
I m x y , =
=∑N
xz i i ii 1
I m x z , =
=∑N
yz i i ii 1
I m y z
Matricialmente (1) se puede escribir del modo siguiente:
{ } [ ] { }= Te OI n nI (2)
donde:
• { } Tn es la matriz fila ( , , )α β γ
ey
z
x
mi
rin
o

TEMA 6: Momentos de inercia Mecánica 1
© TECNUN, 2006
• { }n la matriz columna α β γ
• [ ] − −
= − − − −
x xy xz
O xy y yz
xz yz z
I I I
I I I
I I I
I es una matriz 3x3 real y simétrica
5. Elipsoide de inercia en un punto O a) Definición: es el lugar geométrico de los puntos P, situados en la radiación de rectas con centro en el punto O, de modo en cada una de las rectas el punto P sea tal que:
1=e
OPI
(3)
A partir de (2) se deduce que
= = ⇒ = ee
1 II
OP n r n r (4)
donde = + + x y z r i j k (x, y, z son las coordenadas cartesianas de un punto P genérico). Llevando (4) a (2):
{ } [ ] { } { } [ ] { }= ⇒ =T Te e O e OI I r r I 1 r rI I (5)
que es la ecuación matricial del lugar geométrico, que resulta ser una cuádrica de diámetros finitos, y, por tanto, un elipsoide. Su ecuación cartesiana es:
= + + − − −2 2 2x y z xy xz yz1 I x I y I z 2I xy 2I xz 2I yz
b) Ejes principales de inercia en un punto: Los diámetros principales del elipsoide de inercia en un punto son los ejes principales de inercia en dicho punto. Tomando tales ejes como sistema coordenado, la ecuación del elipsoide de inercia adquiere su forma canónica:
= + +2 2 2x y z1 I x I y I z

TEMA 6: Momentos de inercia Mecánica 1
© TECNUN, 2006
Corolario: los productos de inercia respecto a los planos determinados por los ejes principales de inercia (llamados también planos principales de inercia en el punto O) son nulos. c) Determinación de los ejes principales de inercia:
Las direcciones corresponden a las de los vectores propios correspondientes a la matriz [ ]OI .
6. Aplicación a los sistemas planos: elipse de inercia en un punto
Nos limitamos a sistemas materiales planos, y a rectas y puntos contenidos en el mismo plano que el sistema material (si los puntos y rectas no pertenecieran a ese plano, hay que aplicar la teoría general).
6.1. Definiciones Producto de inercia respectos de dos rectas que se cortan r, s:
== Σ δ
N
rs i i ii 1I m d
id distancia de la masa im a la recta r (con su signo)
δi distancia de la masa im a la recta s (con su signo)
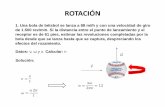
6.2. Cálculo del momento de inercia respecto a una recta cualquiera
Operando análogamente al caso general (hágalo) se obtiene:
ex
y mi
rin
o ϕ
●
= ϕ + ϕ − ϕ ϕ2 2e x y xyI I cos I sen 2I sen cos
donde =
=∑N
xy i i ii 1
I m x y

TEMA 6: Momentos de inercia Mecánica 1
© TECNUN, 2006
6.3. Elipse de inercia en un punto a) Definición: es el lugar geométrico de los puntos P sobre las rectas del haz contenido en el plano con centro en O, tales que
1=e
OPI
Razonando de modo análogo al general, la ecuación de ese lugar es
= + −2 2x y xy1 I x I y 2I xy
y corresponde a una elipse cuyo centro es el punto O b) Ejes principales de inercia en O: Son los diámetros principales de la elipse de inercia en O. Y si ellos se toman como ejes cartesianos la ecuación de la elipse es:
= +2 2x y1 I x I y
FIN DEL TEMA 6