PLANTA DE TERCER ORDEN MEDIANTE UN CIRCUITO · PDF file5 Fig. 14. Método para la...
9
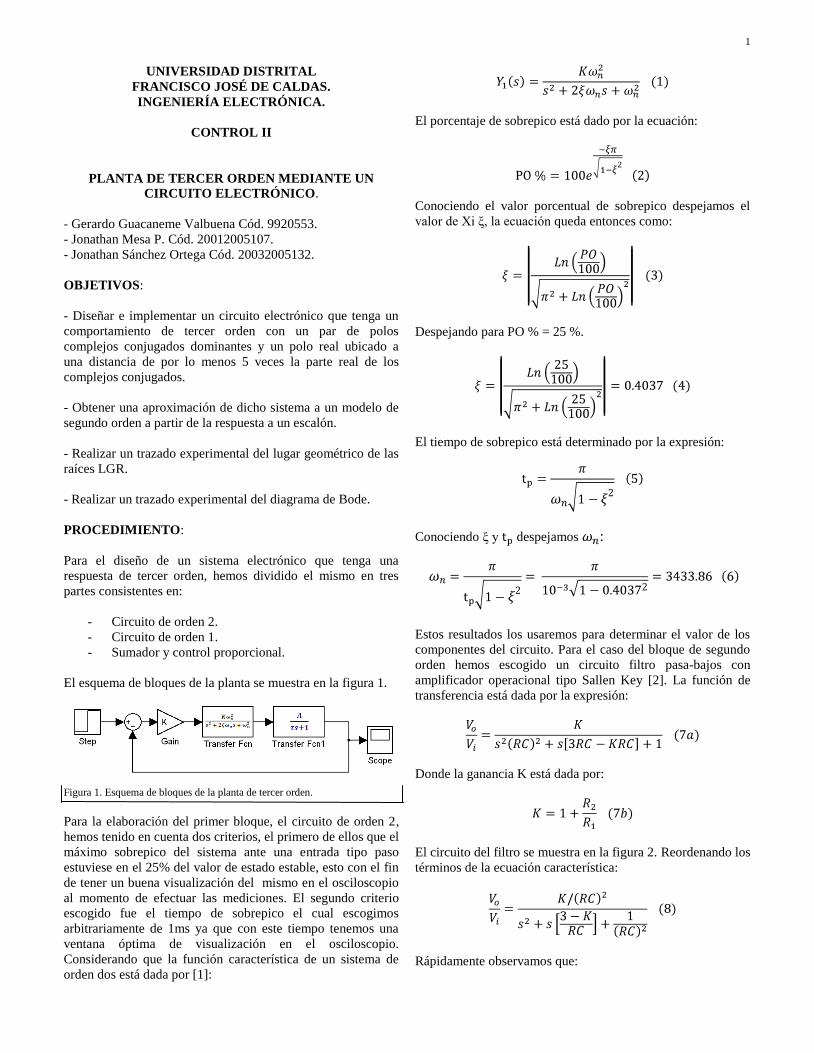
1 UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS. INGENIERÍA ELECTRÓNICA. CONTROL II PLANTA DE TERCER ORDEN MEDIANTE UN CIRCUITO ELECTRÓNICO. - Gerardo Guacaneme Valbuena Cód. 9920553. - Jonathan Mesa P. Cód. 20012005107. - Jonathan Sánchez Ortega Cód. 20032005132. OBJETIVOS: - Diseñar e implementar un circuito electrónico que tenga un comportamiento de tercer orden con un par de polos complejos conjugados dominantes y un polo real ubicado a una distancia de por lo menos 5 veces la parte real de los complejos conjugados. - Obtener una aproximación de dicho sistema a un modelo de segundo orden a partir de la respuesta a un escalón. - Realizar un trazado experimental del lugar geométrico de las raíces LGR. - Realizar un trazado experimental del diagrama de Bode. PROCEDIMIENTO: Para el diseño de un sistema electrónico que tenga una respuesta de tercer orden, hemos dividido el mismo en tres partes consistentes en: - Circuito de orden 2. - Circuito de orden 1. - Sumador y control proporcional. El esquema de bloques de la planta se muestra en la figura 1. Figura 1. Esquema de bloques de la planta de tercer orden. Para la elaboración del primer bloque, el circuito de orden 2, hemos tenido en cuenta dos criterios, el primero de ellos que el máximo sobrepico del sistema ante una entrada tipo paso estuviese en el 25% del valor de estado estable, esto con el fin de tener un buena visualización del mismo en el osciloscopio al momento de efectuar las mediciones. El segundo criterio escogido fue el tiempo de sobrepico el cual escogimos arbitrariamente de 1ms ya que con este tiempo tenemos una ventana óptima de visualización en el osciloscopio. Considerando que la función característica de un sistema de orden dos está dada por [1]: El porcentaje de sobrepico está dado por la ecuación: Conociendo el valor porcentual de sobrepico despejamos el valor de Xi ξ, la ecuación queda entonces como: Despejando para PO % = 25 %. El tiempo de sobrepico está determinado por la expresión: Conociendo ξ y despejamos : Estos resultados los usaremos para determinar el valor de los componentes del circuito. Para el caso del bloque de segundo orden hemos escogido un circuito filtro pasa-bajos con amplificador operacional tipo Sallen Key [2]. La función de transferencia está dada por la expresión: Donde la ganancia K está dada por: El circuito del filtro se muestra en la figura 2. Reordenando los términos de la ecuación característica: Rápidamente observamos que:
Transcript of PLANTA DE TERCER ORDEN MEDIANTE UN CIRCUITO · PDF file5 Fig. 14. Método para la...
1
UNIVERSIDAD DISTRITAL
FRANCISCO JOSÉ DE CALDAS.
INGENIERÍA ELECTRÓNICA.
CONTROL II
PLANTA DE TERCER ORDEN MEDIANTE UN
CIRCUITO ELECTRÓNICO.
- Gerardo Guacaneme Valbuena Cód. 9920553.
- Jonathan Mesa P. Cód. 20012005107.
- Jonathan Sánchez Ortega Cód. 20032005132.
OBJETIVOS:
- Diseñar e implementar un circuito electrónico que tenga un
comportamiento de tercer orden con un par de polos
complejos conjugados dominantes y un polo real ubicado a
una distancia de por lo menos 5 veces la parte real de los
complejos conjugados.
- Obtener una aproximación de dicho sistema a un modelo de
segundo orden a partir de la respuesta a un escalón.
- Realizar un trazado experimental del lugar geométrico de las
raíces LGR.
- Realizar un trazado experimental del diagrama de Bode.
PROCEDIMIENTO:
Para el diseño de un sistema electrónico que tenga una
respuesta de tercer orden, hemos dividido el mismo en tres
partes consistentes en:
- Circuito de orden 2.
- Circuito de orden 1.
- Sumador y control proporcional.
El esquema de bloques de la planta se muestra en la figura 1.
Figura 1. Esquema de bloques de la planta de tercer orden.
Para la elaboración del primer bloque, el circuito de orden 2,
hemos tenido en cuenta dos criterios, el primero de ellos que el
máximo sobrepico del sistema ante una entrada tipo paso
estuviese en el 25% del valor de estado estable, esto con el fin
de tener un buena visualización del mismo en el osciloscopio
al momento de efectuar las mediciones. El segundo criterio
escogido fue el tiempo de sobrepico el cual escogimos
arbitrariamente de 1ms ya que con este tiempo tenemos una
ventana óptima de visualización en el osciloscopio.
Considerando que la función característica de un sistema de
orden dos está dada por [1]:
El porcentaje de sobrepico está dado por la ecuación:
Conociendo el valor porcentual de sobrepico despejamos el
valor de Xi ξ, la ecuación queda entonces como:
Despejando para PO % = 25 %.
El tiempo de sobrepico está determinado por la expresión:
Conociendo ξ y despejamos :
Estos resultados los usaremos para determinar el valor de los
componentes del circuito. Para el caso del bloque de segundo
orden hemos escogido un circuito filtro pasa-bajos con
amplificador operacional tipo Sallen Key [2]. La función de
transferencia está dada por la expresión:
Donde la ganancia K está dada por:
El circuito del filtro se muestra en la figura 2. Reordenando los
términos de la ecuación característica:
Rápidamente observamos que:
2
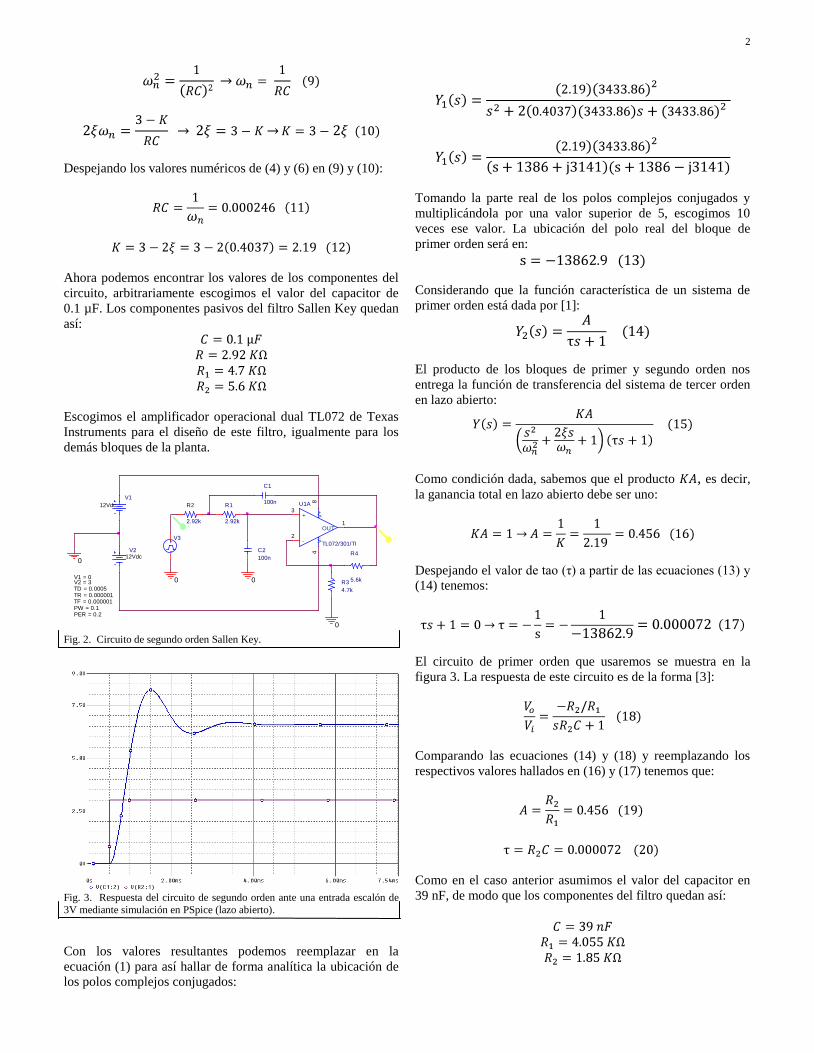
Despejando los valores numéricos de (4) y (6) en (9) y (10):
Ahora podemos encontrar los valores de los componentes del
circuito, arbitrariamente escogimos el valor del capacitor de
0.1 µF. Los componentes pasivos del filtro Sallen Key quedan
así:
Escogimos el amplificador operacional dual TL072 de Texas
Instruments para el diseño de este filtro, igualmente para los
demás bloques de la planta.
Fig. 2. Circuito de segundo orden Sallen Key.
Fig. 3. Respuesta del circuito de segundo orden ante una entrada escalón de
3V mediante simulación en PSpice (lazo abierto).
Con los valores resultantes podemos reemplazar en la
ecuación (1) para así hallar de forma analítica la ubicación de
los polos complejos conjugados:
Tomando la parte real de los polos complejos conjugados y
multiplicándola por una valor superior de 5, escogimos 10
veces ese valor. La ubicación del polo real del bloque de
primer orden será en:
Considerando que la función característica de un sistema de
primer orden está dada por [1]:
El producto de los bloques de primer y segundo orden nos
entrega la función de transferencia del sistema de tercer orden
en lazo abierto:
Como condición dada, sabemos que el producto , es decir,
la ganancia total en lazo abierto debe ser uno:
Despejando el valor de tao (τ) a partir de las ecuaciones (13) y
(14) tenemos:
El circuito de primer orden que usaremos se muestra en la
figura 3. La respuesta de este circuito es de la forma [3]:
Comparando las ecuaciones (14) y (18) y reemplazando los
respectivos valores hallados en (16) y (17) tenemos que:
Como en el caso anterior asumimos el valor del capacitor en
39 nF, de modo que los componentes del filtro quedan así:
U1A
TL072/301/TI
+3
-2
V+
8V
-4
OUT1
V1
12Vdc
V212Vdc
0
0
V3
TD = 0.0005
TF = 0.000001PW = 0.1PER = 0.2
V1 = 0
TR = 0.000001
V2 = 3
R1
2.92k
R2
2.92k
R3
4.7k
R4
5.6k
C1
100n
C2
100n
0 0
V
V
3
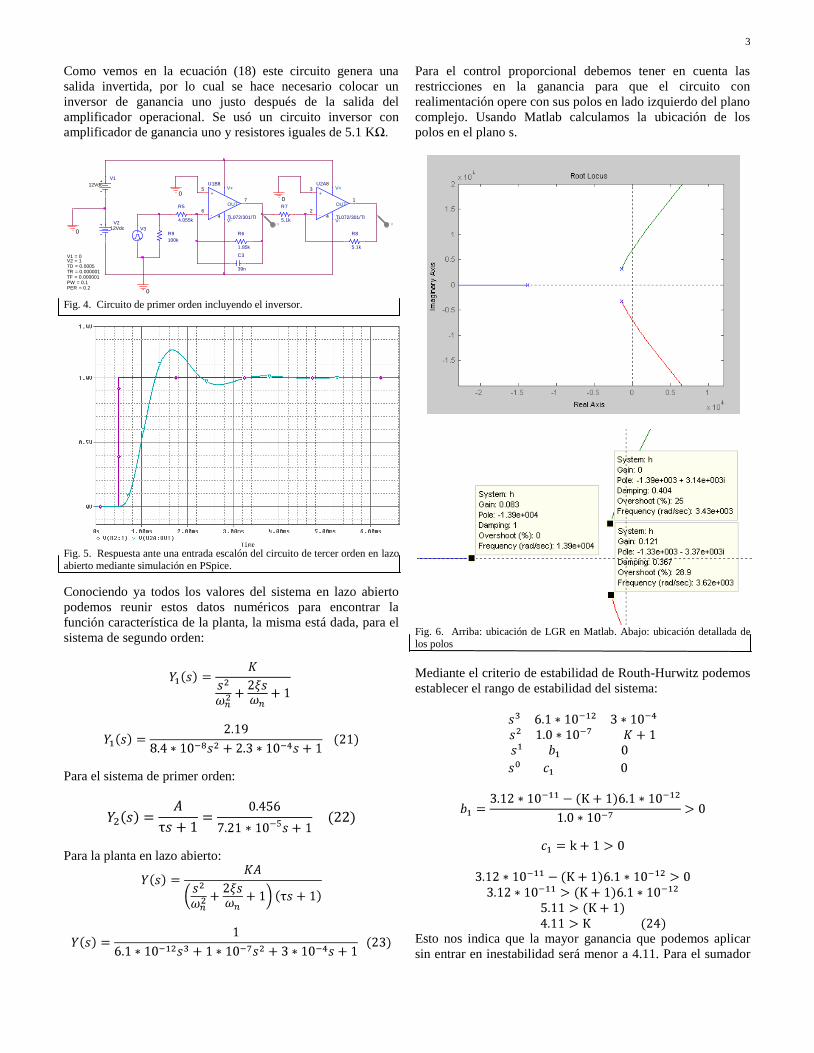
Como vemos en la ecuación (18) este circuito genera una
salida invertida, por lo cual se hace necesario colocar un
inversor de ganancia uno justo después de la salida del
amplificador operacional. Se usó un circuito inversor con
amplificador de ganancia uno y resistores iguales de 5.1 KΩ.
Fig. 4. Circuito de primer orden incluyendo el inversor.
Fig. 5. Respuesta ante una entrada escalón del circuito de tercer orden en lazo
abierto mediante simulación en PSpice.
Conociendo ya todos los valores del sistema en lazo abierto
podemos reunir estos datos numéricos para encontrar la
función característica de la planta, la misma está dada, para el
sistema de segundo orden:
Para el sistema de primer orden:
Para la planta en lazo abierto:
Para el control proporcional debemos tener en cuenta las
restricciones en la ganancia para que el circuito con
realimentación opere con sus polos en lado izquierdo del plano
complejo. Usando Matlab calculamos la ubicación de los
polos en el plano s.
Fig. 6. Arriba: ubicación de LGR en Matlab. Abajo: ubicación detallada de
los polos
Mediante el criterio de estabilidad de Routh-Hurwitz podemos
establecer el rango de estabilidad del sistema:
Esto nos indica que la mayor ganancia que podemos aplicar
sin entrar en inestabilidad será menor a 4.11. Para el sumador
U1B
TL072/301/TI
+5
-6
V+8
V-4
OUT7
R5
4.055k
R6
1.85k
0
C3
39n
U2A
TL072/301/TI
+3
-2
V+8
V-4
OUT1
R7
5.1k
R8
5.1k
0
V1
12Vdc
V212Vdc
0V3
TD = 0.0005
TF = 0.000001PW = 0.1PER = 0.2
V1 = 0
TR = 0.000001
V2 = 1
0
R9
100k
VV
4
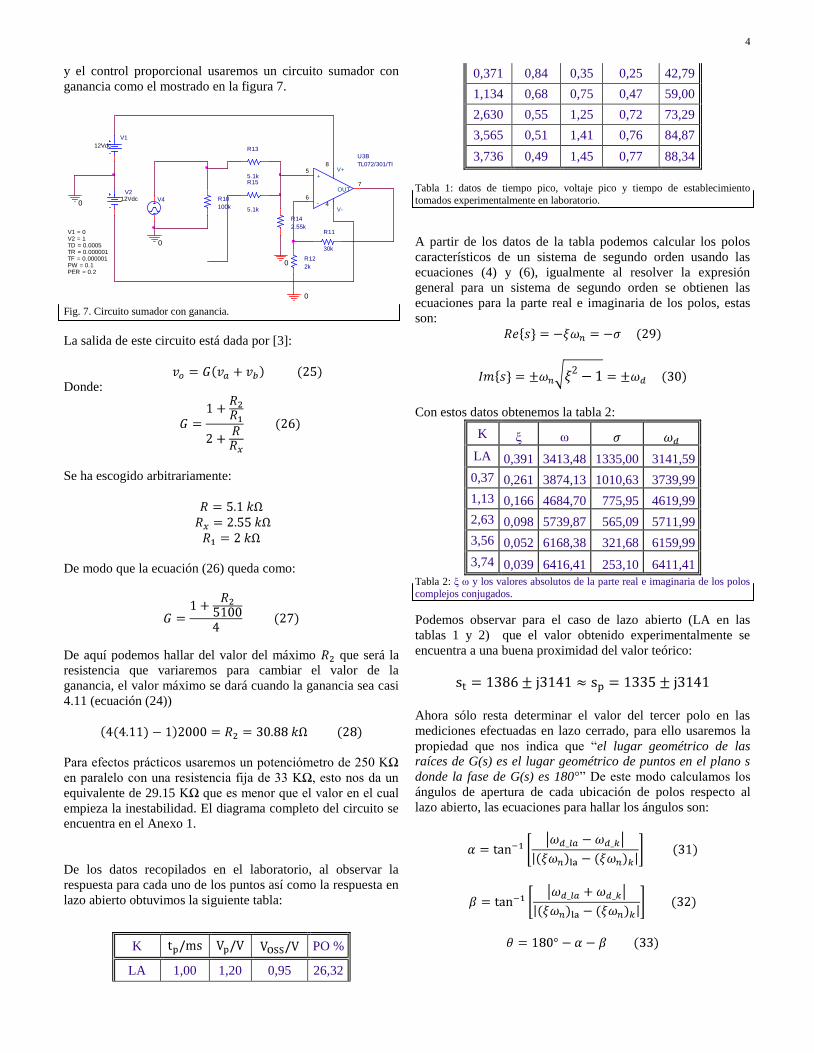
y el control proporcional usaremos un circuito sumador con
ganancia como el mostrado en la figura 7.
Fig. 7. Circuito sumador con ganancia.
La salida de este circuito está dada por [3]:
Donde:
Se ha escogido arbitrariamente:
De modo que la ecuación (26) queda como:
De aquí podemos hallar del valor del máximo que será la
resistencia que variaremos para cambiar el valor de la
ganancia, el valor máximo se dará cuando la ganancia sea casi
4.11 (ecuación (24))
Para efectos prácticos usaremos un potenciómetro de 250 KΩ
en paralelo con una resistencia fija de 33 KΩ, esto nos da un
equivalente de 29.15 KΩ que es menor que el valor en el cual
empieza la inestabilidad. El diagrama completo del circuito se
encuentra en el Anexo 1.
De los datos recopilados en el laboratorio, al observar la
respuesta para cada uno de los puntos así como la respuesta en
lazo abierto obtuvimos la siguiente tabla:
K PO %
LA 1,00 1,20 0,95 26,32
0,371 0,84 0,35 0,25 42,79
1,134 0,68 0,75 0,47 59,00
2,630 0,55 1,25 0,72 73,29
3,565 0,51 1,41 0,76 84,87
3,736 0,49 1,45 0,77 88,34
Tabla 1: datos de tiempo pico, voltaje pico y tiempo de establecimiento
tomados experimentalmente en laboratorio.
A partir de los datos de la tabla podemos calcular los polos
característicos de un sistema de segundo orden usando las
ecuaciones (4) y (6), igualmente al resolver la expresión
general para un sistema de segundo orden se obtienen las
ecuaciones para la parte real e imaginaria de los polos, estas
son:
Con estos datos obtenemos la tabla 2:
K ξ ω
LA 0,391 3413,48 1335,00 3141,59
0,37 0,261 3874,13 1010,63 3739,99
1,13 0,166 4684,70 775,95 4619,99
2,63 0,098 5739,87 565,09 5711,99
3,56 0,052 6168,38 321,68 6159,99
3,74 0,039 6416,41 253,10 6411,41
Tabla 2: ξ ω y los valores absolutos de la parte real e imaginaria de los polos
complejos conjugados.
Podemos observar para el caso de lazo abierto (LA en las
tablas 1 y 2) que el valor obtenido experimentalmente se
encuentra a una buena proximidad del valor teórico:
Ahora sólo resta determinar el valor del tercer polo en las
mediciones efectuadas en lazo cerrado, para ello usaremos la
propiedad que nos indica que “el lugar geométrico de las
raíces de G(s) es el lugar geométrico de puntos en el plano s
donde la fase de G(s) es 180°” De este modo calculamos los
ángulos de apertura de cada ubicación de polos respecto al
lazo abierto, las ecuaciones para hallar los ángulos son:
V1
12Vdc
V212Vdc
0V4
TD = 0.0005
TF = 0.000001PW = 0.1PER = 0.2
V1 = 0
TR = 0.000001
V2 = 10
R10
100k
R14
2.55k
0
U3B
TL072/301/TI
+5
-6
V+8
V-4
OUT7
R11
30k
R12
2k
R13
5.1kR15
5.1k
0
5
Fig. 14. Método para la obtención del tercer polo en el sistema de lazo cerrado
Al calcular sobre los datos anteriores tenemos que:
α β θ s3
61,5396 87,3013 31,1591 -14240,86111
69,2859 85,8802 24,8339 -14996,22591
73,3254 85,0300 21,6446 -15817,21713
71,4422 83,7826 24,7751 -16483,7303
71,6920 83,5387 24,7693 -16859,70537 Tabla 3: Calculo de los ángulos entre la ubicación de los polos para una
ganancia dada y la ubicación en lazo abierto. Se obtiene el tercer polo sobre el
eje real.
Estos valores si tienen unas variaciones importantes respecto a
los valores simulados (Fig. 6). Esto se debe primordialmente a
que una pequeña variación en la medición del tiempo de
establecimiento genera igualmente ligeros cambios en el PO
%, pero estos se ven reflejados de manera importante en la
ubicación de los polos mediante LGR.
Fig. 15. Ubicación de los polos complejos conjugados en el plano s obtenidos
experimentalmente.
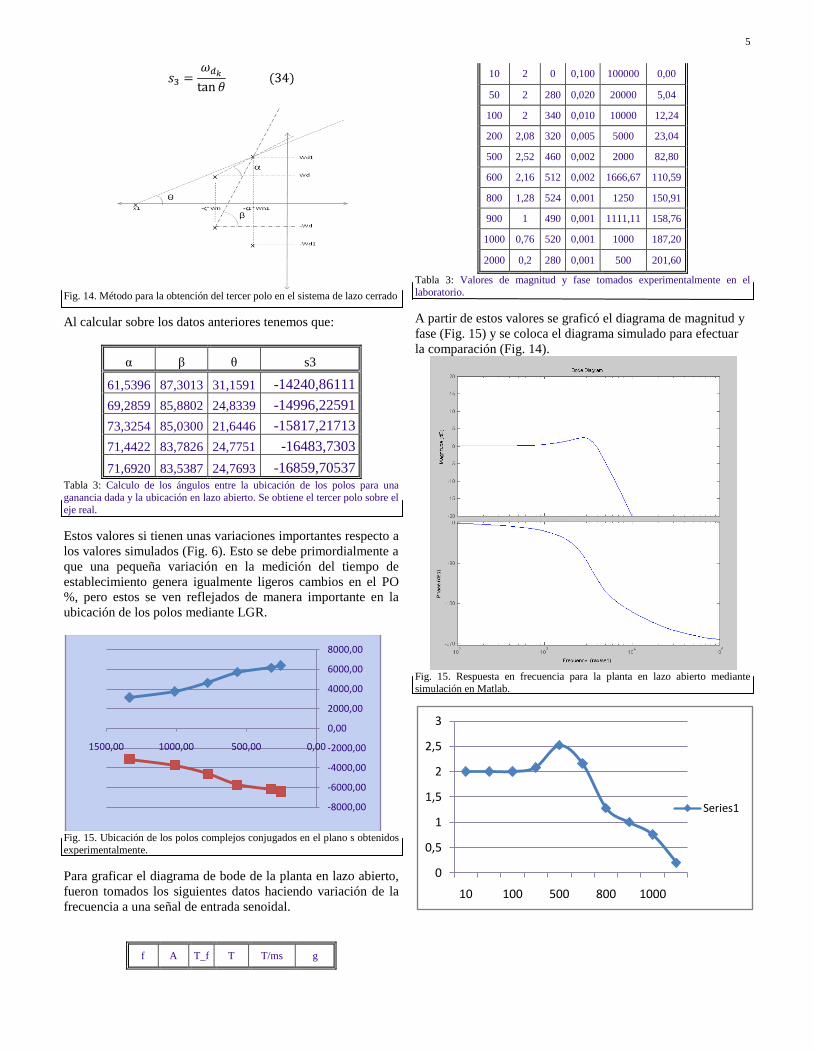
Para graficar el diagrama de bode de la planta en lazo abierto,
fueron tomados los siguientes datos haciendo variación de la
frecuencia a una señal de entrada senoidal.
f A T_f T T/ms g
10 2 0 0,100 100000 0,00
50 2 280 0,020 20000 5,04
100 2 340 0,010 10000 12,24
200 2,08 320 0,005 5000 23,04
500 2,52 460 0,002 2000 82,80
600 2,16 512 0,002 1666,67 110,59
800 1,28 524 0,001 1250 150,91
900 1 490 0,001 1111,11 158,76
1000 0,76 520 0,001 1000 187,20
2000 0,2 280 0,001 500 201,60
Tabla 3: Valores de magnitud y fase tomados experimentalmente en el
laboratorio.
A partir de estos valores se graficó el diagrama de magnitud y
fase (Fig. 15) y se coloca el diagrama simulado para efectuar
la comparación (Fig. 14).
Fig. 15. Respuesta en frecuencia para la planta en lazo abierto mediante
simulación en Matlab.
-8000,00
-6000,00
-4000,00
-2000,00
0,00
2000,00
4000,00
6000,00
8000,00
0,00500,001000,001500,00
0
0,5
1
1,5
2
2,5
3
10 100 500 800 1000
Series1
6
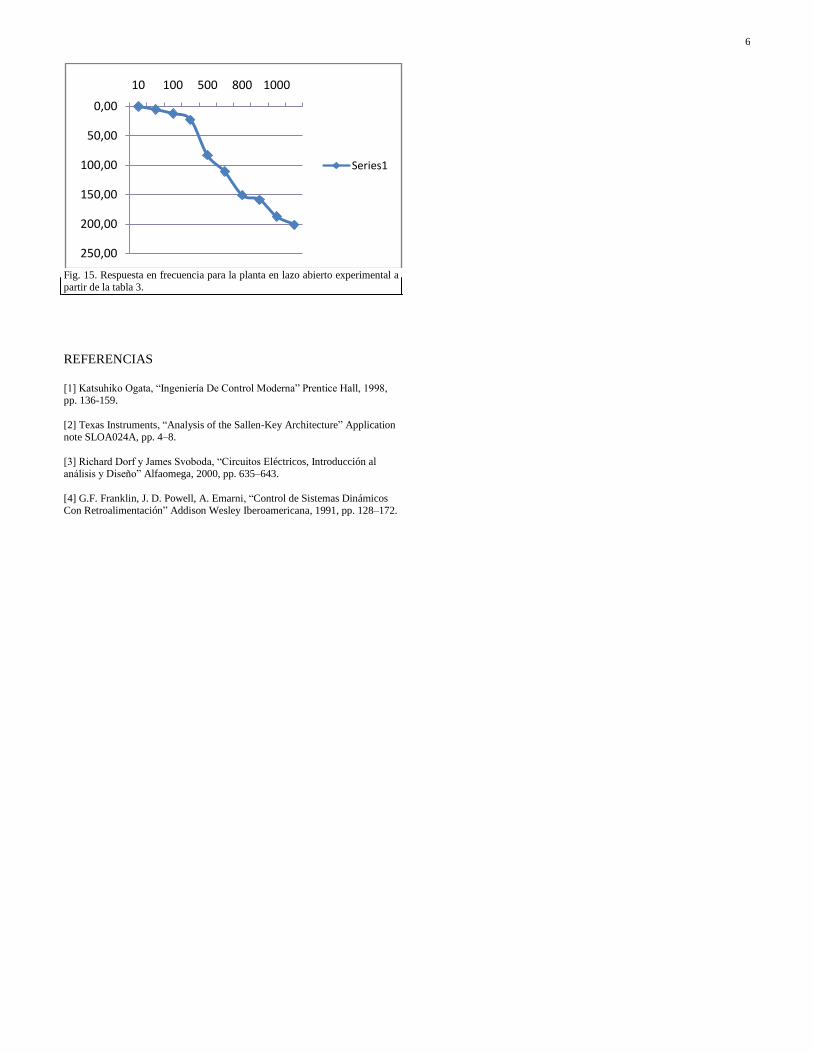
Fig. 15. Respuesta en frecuencia para la planta en lazo abierto experimental a partir de la tabla 3.
REFERENCIAS
[1] Katsuhiko Ogata, “Ingeniería De Control Moderna” Prentice Hall, 1998, pp. 136-159.
[2] Texas Instruments, “Analysis of the Sallen-Key Architecture” Application note SLOA024A, pp. 4–8.
[3] Richard Dorf y James Svoboda, “Circuitos Eléctricos, Introducción al análisis y Diseño” Alfaomega, 2000, pp. 635–643.
[4] G.F. Franklin, J. D. Powell, A. Emarni, “Control de Sistemas Dinámicos Con Retroalimentación” Addison Wesley Iberoamericana, 1991, pp. 128–172.
0,00
50,00
100,00
150,00
200,00
250,00
10 100 500 800 1000
Series1
7
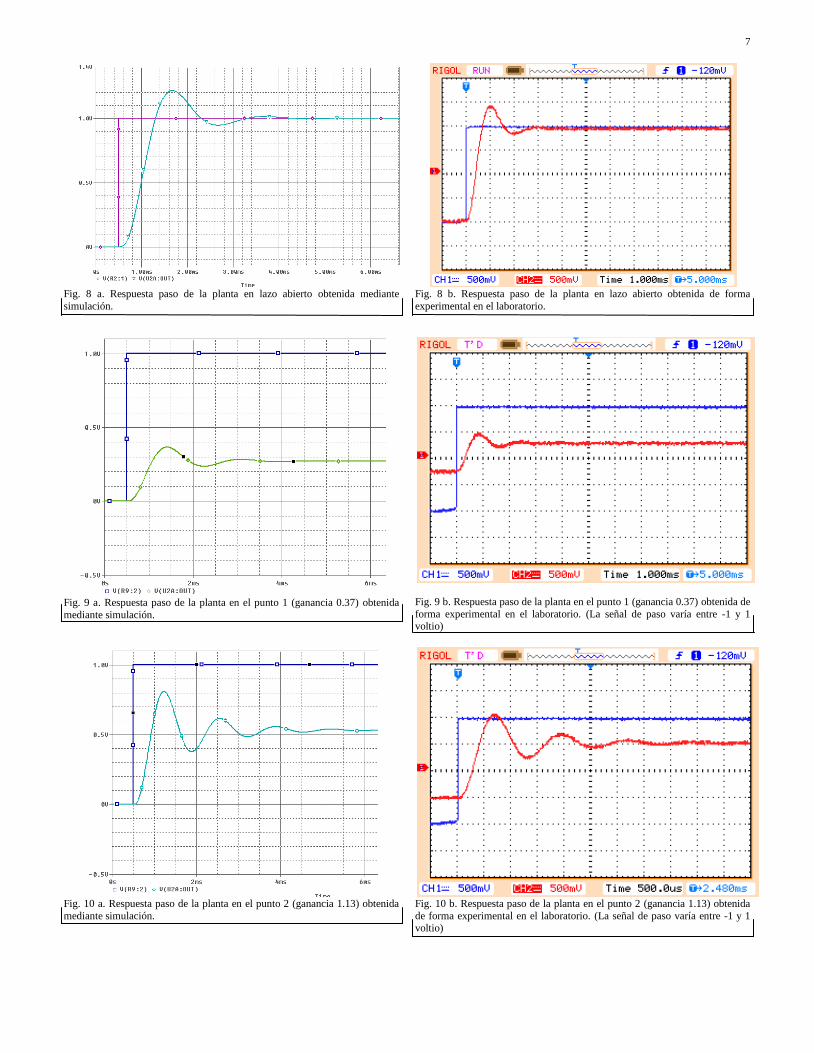
Fig. 8 a. Respuesta paso de la planta en lazo abierto obtenida mediante
simulación.
Fig. 9 a. Respuesta paso de la planta en el punto 1 (ganancia 0.37) obtenida
mediante simulación.
Fig. 10 a. Respuesta paso de la planta en el punto 2 (ganancia 1.13) obtenida
mediante simulación.
Fig. 8 b. Respuesta paso de la planta en lazo abierto obtenida de forma
experimental en el laboratorio.
Fig. 9 b. Respuesta paso de la planta en el punto 1 (ganancia 0.37) obtenida de
forma experimental en el laboratorio. (La señal de paso varía entre -1 y 1 voltio)
Fig. 10 b. Respuesta paso de la planta en el punto 2 (ganancia 1.13) obtenida
de forma experimental en el laboratorio. (La señal de paso varía entre -1 y 1 voltio)
8
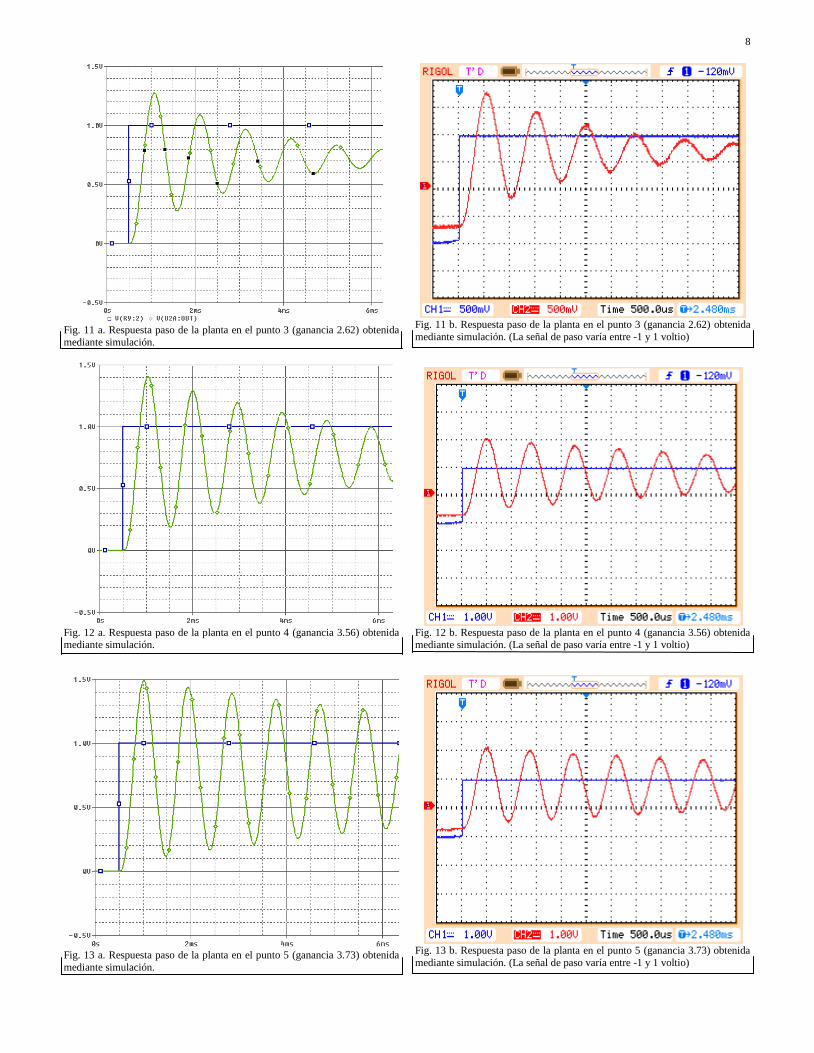
Fig. 11 a. Respuesta paso de la planta en el punto 3 (ganancia 2.62) obtenida
mediante simulación.
Fig. 12 a. Respuesta paso de la planta en el punto 4 (ganancia 3.56) obtenida mediante simulación.
Fig. 13 a. Respuesta paso de la planta en el punto 5 (ganancia 3.73) obtenida
mediante simulación.
Fig. 11 b. Respuesta paso de la planta en el punto 3 (ganancia 2.62) obtenida
mediante simulación. (La señal de paso varía entre -1 y 1 voltio)
Fig. 12 b. Respuesta paso de la planta en el punto 4 (ganancia 3.56) obtenida mediante simulación. (La señal de paso varía entre -1 y 1 voltio)
Fig. 13 b. Respuesta paso de la planta en el punto 5 (ganancia 3.73) obtenida
mediante simulación. (La señal de paso varía entre -1 y 1 voltio)
9
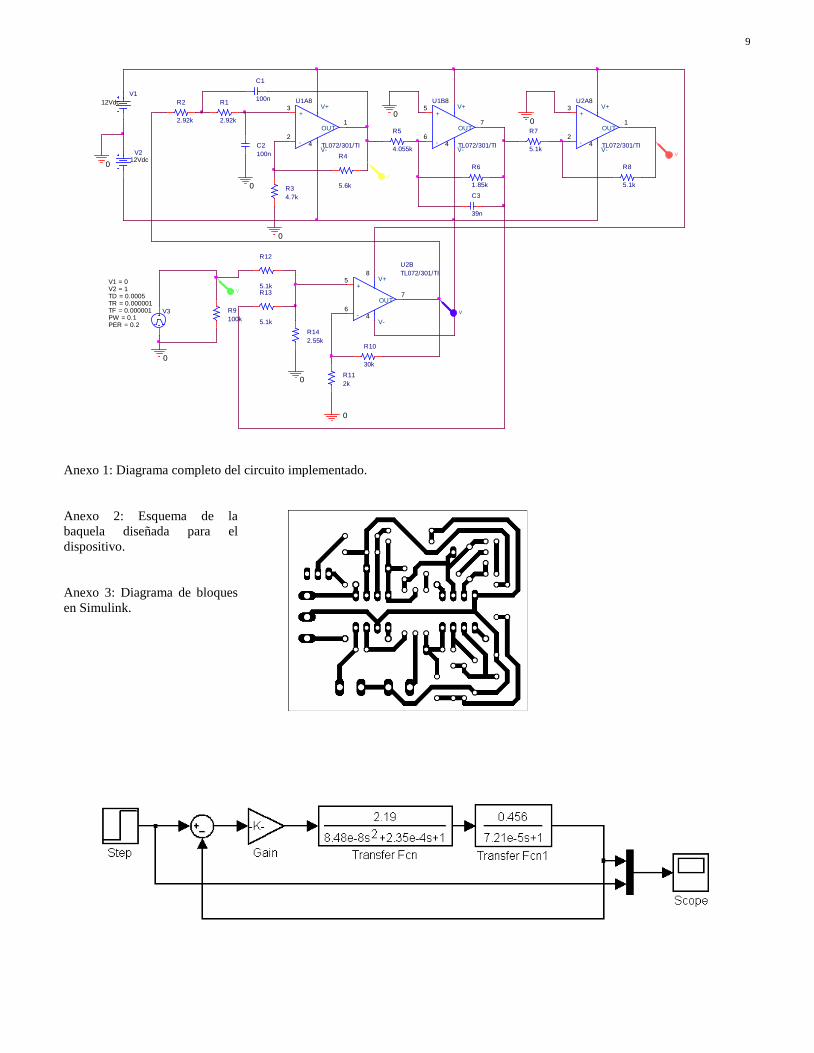
Anexo 1: Diagrama completo del circuito implementado.
Anexo 2: Esquema de la
baquela diseñada para el
dispositivo.
Anexo 3: Diagrama de bloques
en Simulink.
U1A
TL072/301/TI
+3
-2
V+8
V-4
OUT1
V1
12Vdc
V212Vdc
0
0
V3
TD = 0.0005
TF = 0.000001PW = 0.1PER = 0.2
V1 = 0
TR = 0.000001
V2 = 1
R1
2.92k
R2
2.92k
R3
4.7k
R4
5.6k
C1
100n
C2
100n
V
V
V
V
0
0
R9
100k
U1B
TL072/301/TI
+5
-6
V+8
V-4
OUT7
R14
2.55k
0
R5
4.055k
R6
1.85k
0
C3
39n
U2A
TL072/301/TI
+3
-2
V+8
V-4
OUT1
U2B
TL072/301/TI
+5
-6
V+8
V-4
OUT7
R7
5.1k
R8
5.1k
0
R10
30k
R11
2k
R12
5.1kR13
5.1k
0









![Respuesta en frecuencia a lazo abiertomaterias.fi.uba.ar/7609/material/S0600RFLA.pdfRespuesta en frecuencia ( ) ( ) ( ) ( ) ( ) ( ) Re[ ( )] Im[ ] Re[ ]2 Im[ ]2 G j G j ángulo de](https://static.fdocument.org/doc/165x107/60e9df0f6d14fa0c987a5487/respuesta-en-frecuencia-a-lazo-respuesta-en-frecuencia-re.jpg)