Proyecto: Regulador de velocidad Motor DCSi al sistema en lazo cerrado se le aplica una referencia...
23
G Proyecto: Regulador de velocidad Motor DC
Transcript of Proyecto: Regulador de velocidad Motor DCSi al sistema en lazo cerrado se le aplica una referencia...

GG
Proyecto:Regulador de velocidad
Motor DC
G
Regulador de velocidad de Motor DC
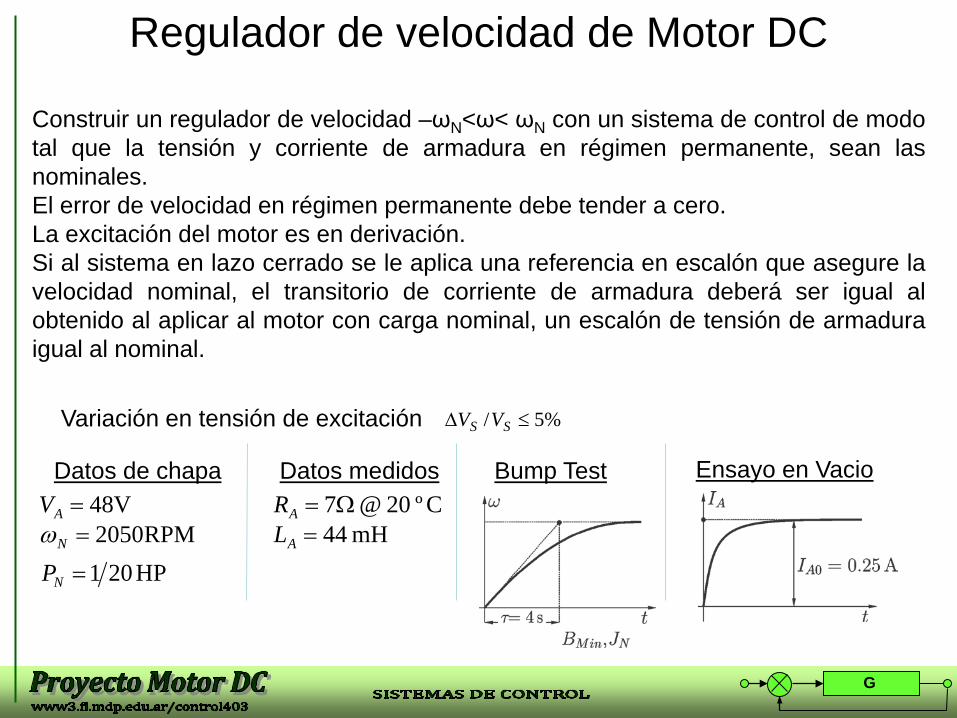
Construir un regulador de velocidad –ωN<ω< ωN con un sistema de control de modotal que la tensión y corriente de armadura en régimen permanente, sean lasnominales.El error de velocidad en régimen permanente debe tender a cero.La excitación del motor es en derivación.Si al sistema en lazo cerrado se le aplica una referencia en escalón que asegure lavelocidad nominal, el transitorio de corriente de armadura deberá ser igual alobtenido al aplicar al motor con carga nominal, un escalón de tensión de armaduraigual al nominal.
Variación en tensión de excitación %5/ ≤∆ SS VV
Datos de chapa Datos medidos Bump Test Ensayo en VacioV48=AV
RPM2050=NωHP201=NP
Cº 20 @ 7Ω=ARmH 44=AL
G
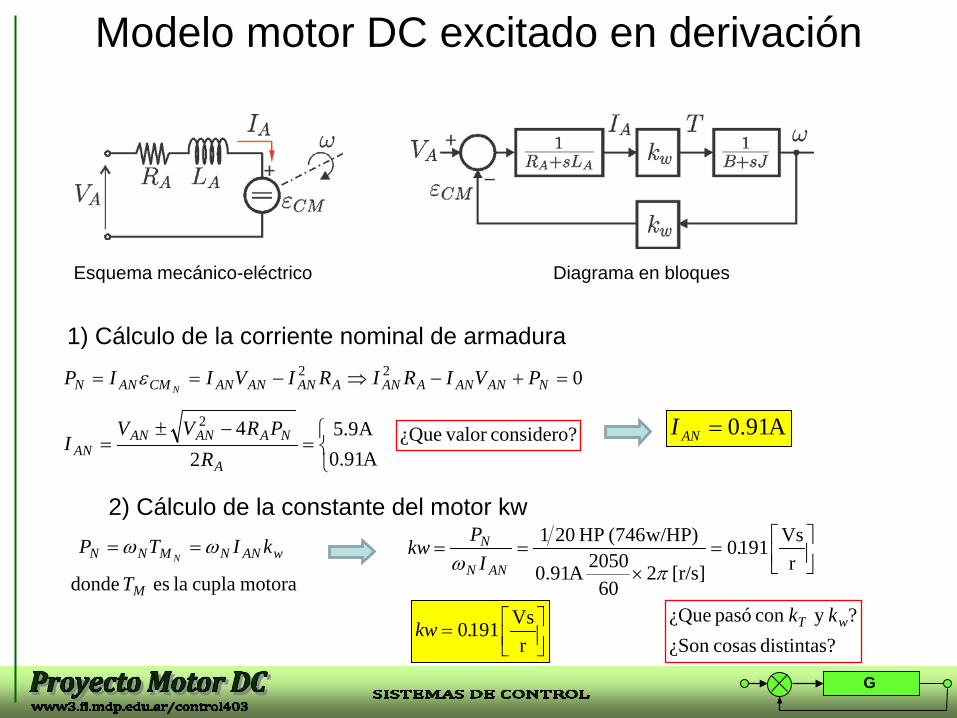
Modelo motor DC excitado en derivación
Esquema mecánico-eléctrico Diagrama en bloques
1) Cálculo de la corriente nominal de armadura
022 =+−⇒−== NANANAANAANANANCMANN PVIRIRIVIIPN
ε
=−±
=A91.0A9.5
242
A
NAANANAN R
PRVVI
A91.0=ANI
2) Cálculo de la constante del motor kw
wANNMNN kITPN
ωω ==
=
×==
rVs 1910
[r/s] 260
2050A91.0
w/HP)746( HP 201 .I
PkwANN
N
πωmotora cupla la es donde MT
=
rVs 1910.kw
distintas? cosas¿Son ?y con pasó ¿Que wT kk
considero? valor ¿Que
G
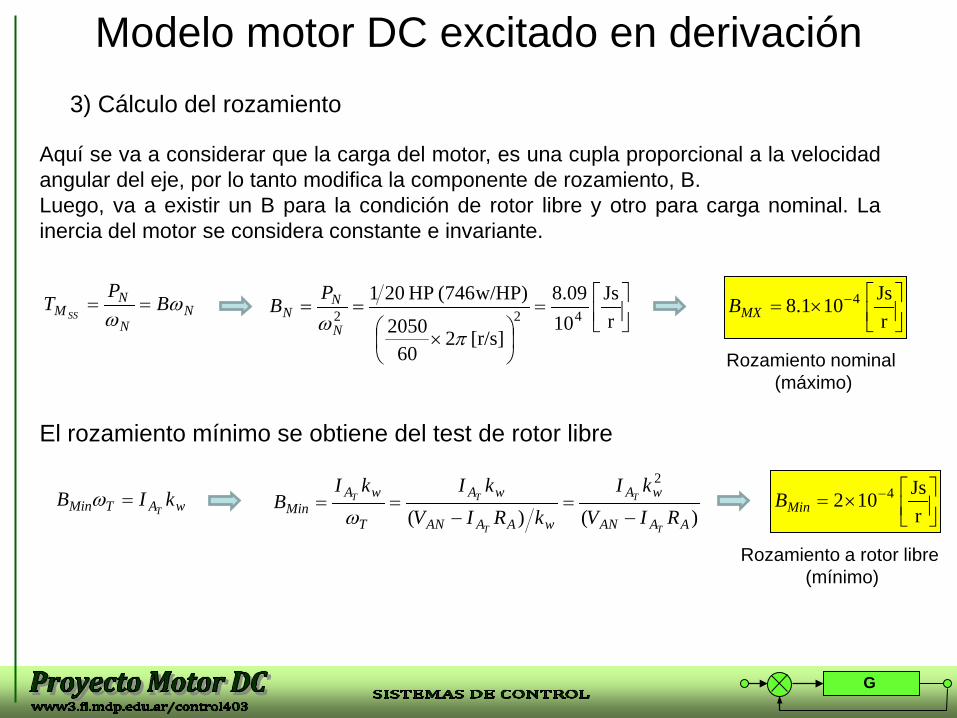
Modelo motor DC excitado en derivación3) Cálculo del rozamiento
Aquí se va a considerar que la carga del motor, es una cupla proporcional a la velocidadangular del eje, por lo tanto modifica la componente de rozamiento, B.Luego, va a existir un B para la condición de rotor libre y otro para carga nominal. Lainercia del motor se considera constante e invariante.
NN
NM BPT
SSω
ω==
=
×
==rJs
1009.8
[r/s] 260
2050
w/HP)746( HP 201422
πωN
NN
PB
×= −
rJs 101.8 4
MXB
Rozamiento nominal (máximo)
El rozamiento mínimo se obtiene del test de rotor libre
wATMin kIBT
=ω)()(
2
AAAN
wA
wAAAN
wA
T
wAMin RIV
kIkRIV
kIkIB
T
T
T
TT
−=
−==
ω
×= −
rJs 102 4
MinB
Rozamiento a rotor libre (mínimo)
G
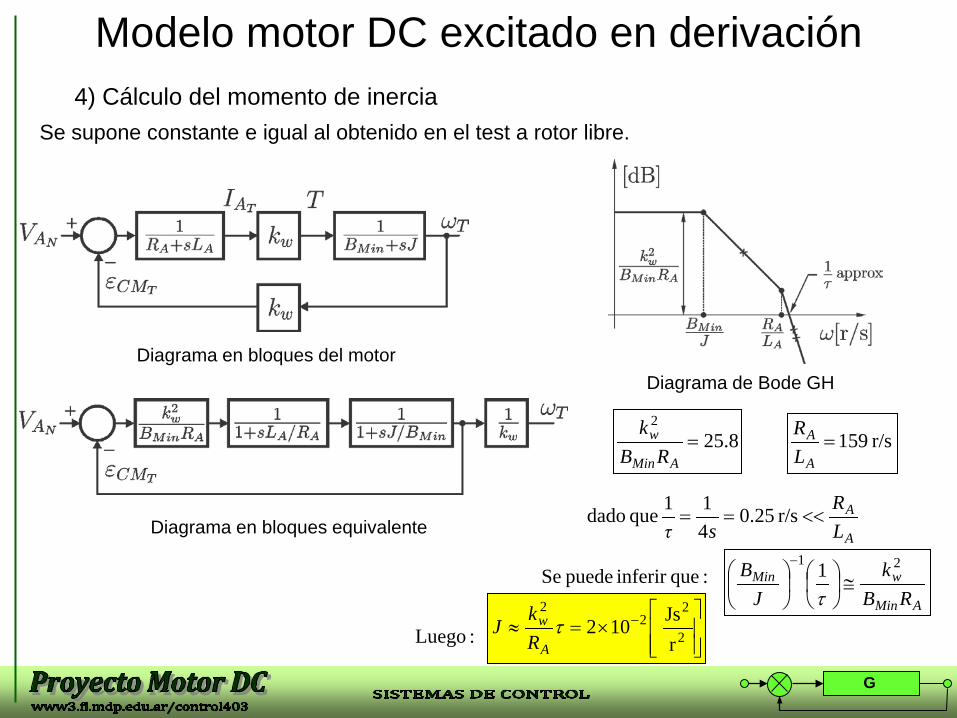
Modelo motor DC excitado en derivación4) Cálculo del momento de inercia
Se supone constante e igual al obtenido en el test a rotor libre.
Diagrama en bloques del motor
Diagrama en bloques equivalente
Diagrama de Bode GH
8.252
=AMin
w
RBk
r/s 159=A
A
LR
A
A
LR
sτ<<== r/s 25.0
411 que dado
:queinferir puede SeAMin
wMin
RBk
JB 21 1
≅
−
τ
:Luego
×=≈ −
2
22
2
rJs 102τ
A
w
RkJ
G
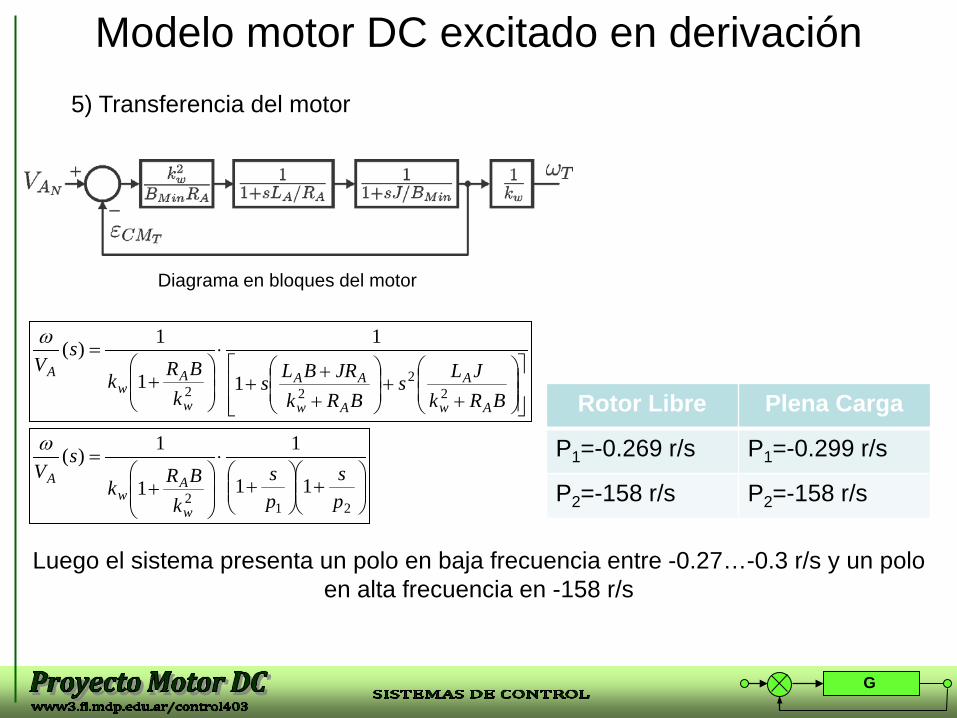
Modelo motor DC excitado en derivación5) Transferencia del motor
Diagrama en bloques del motor
++
++
+
⋅
+
=
BRkJLs
BRkJRBLs
kBRk
sV
Aw
A
Aw
AA
w
Aw
A2
222 1
1
1
1)(ω
+
+
⋅
+
=
212
11
1
1
1)(
ps
ps
kBRk
sV
w
Aw
A
ω
Rotor Libre Plena Carga
P1=-0.269 r/s P1=-0.299 r/s
P2=-158 r/s P2=-158 r/s
Luego el sistema presenta un polo en baja frecuencia entre -0.27…-0.3 r/s y un polo en alta frecuencia en -158 r/s
G
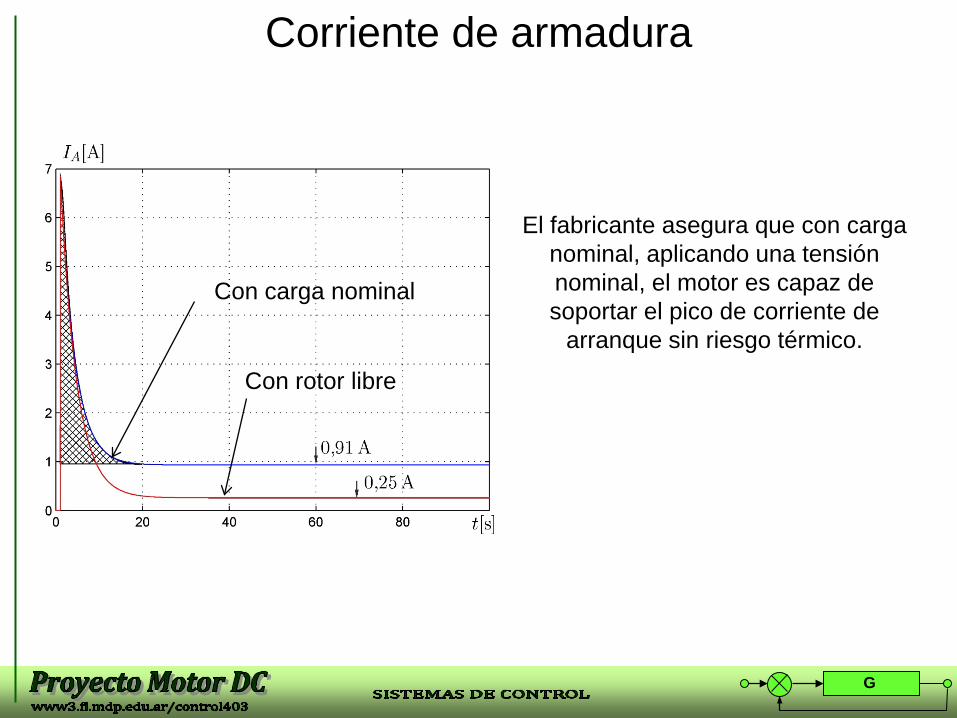
Corriente de armadura
El fabricante asegura que con carga nominal, aplicando una tensión nominal, el motor es capaz de soportar el pico de corriente de
arranque sin riesgo térmico.
Con carga nominal
Con rotor libre
G
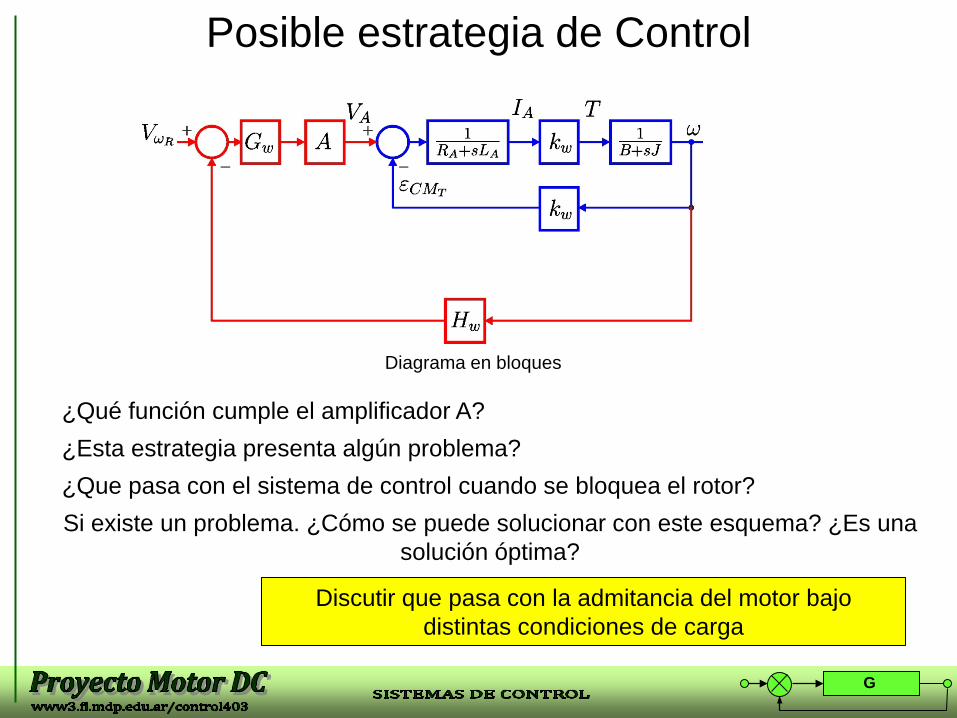
Posible estrategia de Control
¿Qué función cumple el amplificador A?¿Esta estrategia presenta algún problema? ¿Que pasa con el sistema de control cuando se bloquea el rotor? Si existe un problema. ¿Cómo se puede solucionar con este esquema? ¿Es una
solución óptima?
Discutir que pasa con la admitancia del motor bajo distintas condiciones de carga
Diagrama en bloques
G
Análisis de admitancia del motor
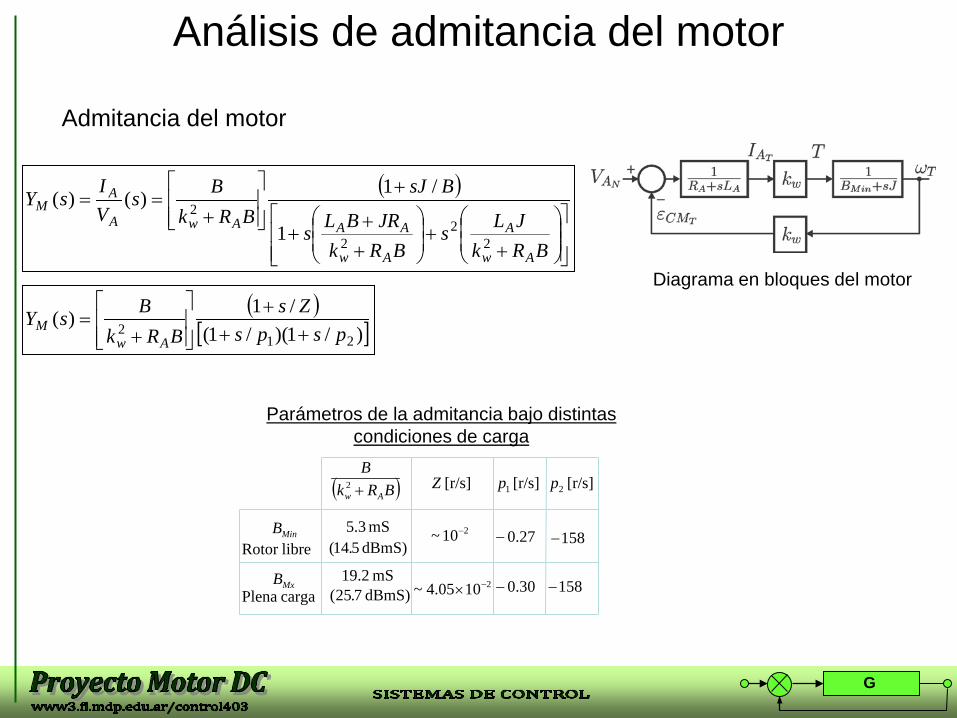
Admitancia del motor
( )
++
++
+
+
+==
BRkJLs
BRkJRBLs
BsJBRk
BsVIsY
Aw
A
Aw
AAAwA
AM
22
2
2
1
/1)()(
( )[ ])/1)(/1(
/1)(21
2 pspsZs
BRkBsY
AwM ++
+
+=
( )BRkB
Aw +2 [r/s] Z [r/s] 1p [r/s] 2p
MinBlibreRotor
MxBcarga Plena
mS 3.5dBmS) 514( .
mS 2.19dBmS) 725( .
210~ −
21005.4~ −×
27.0−
30.0−
158−
158−
Diagrama en bloques del motor
Parámetros de la admitancia bajo distintas condiciones de carga
G
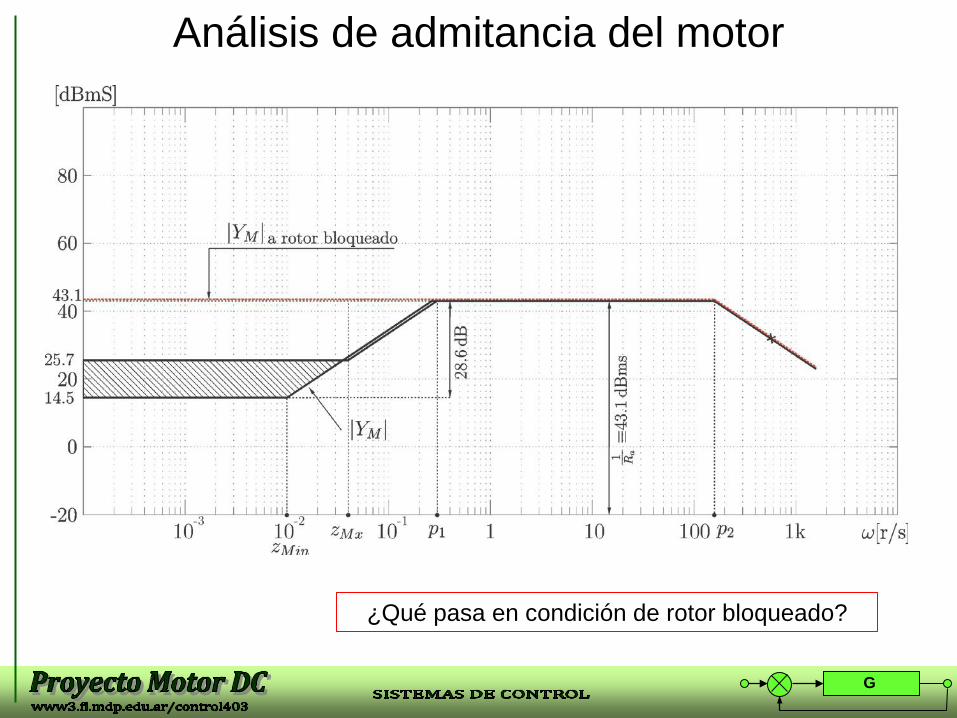
Análisis de admitancia del motor
¿Qué pasa en condición de rotor bloqueado?
G
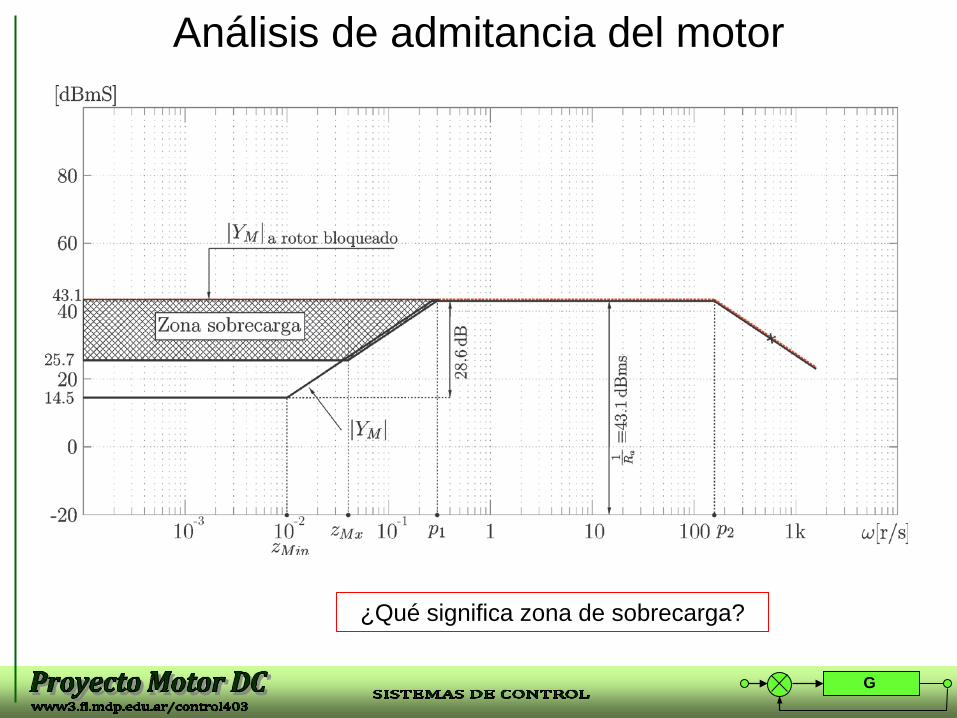
Análisis de admitancia del motor
¿Qué significa zona de sobrecarga?
G
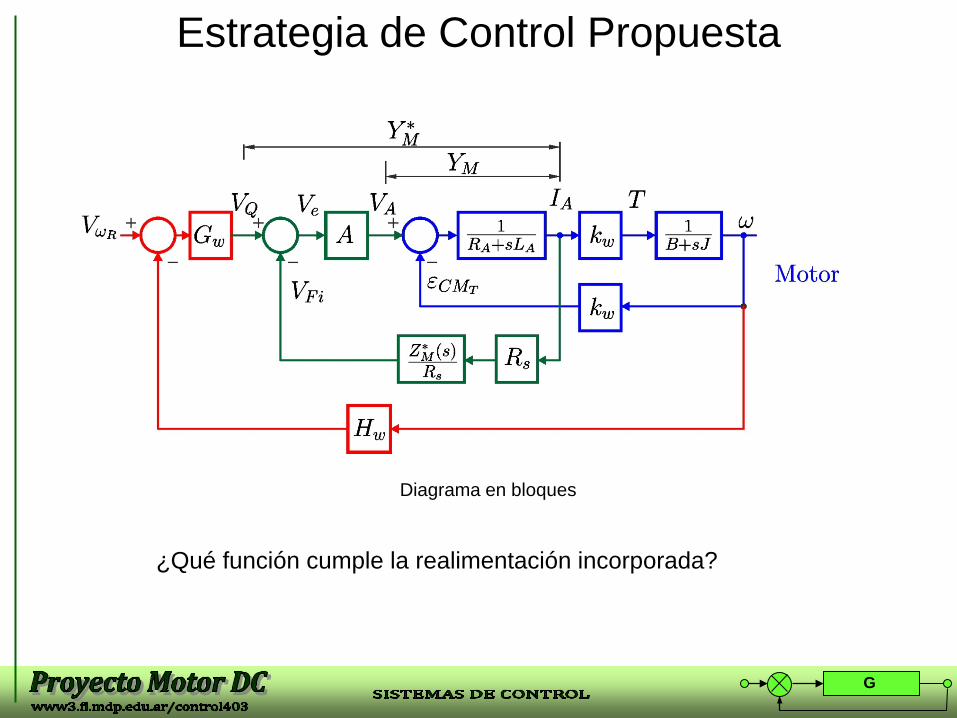
Estrategia de Control Propuesta
Diagrama en bloques
¿Qué función cumple la realimentación incorporada?
G
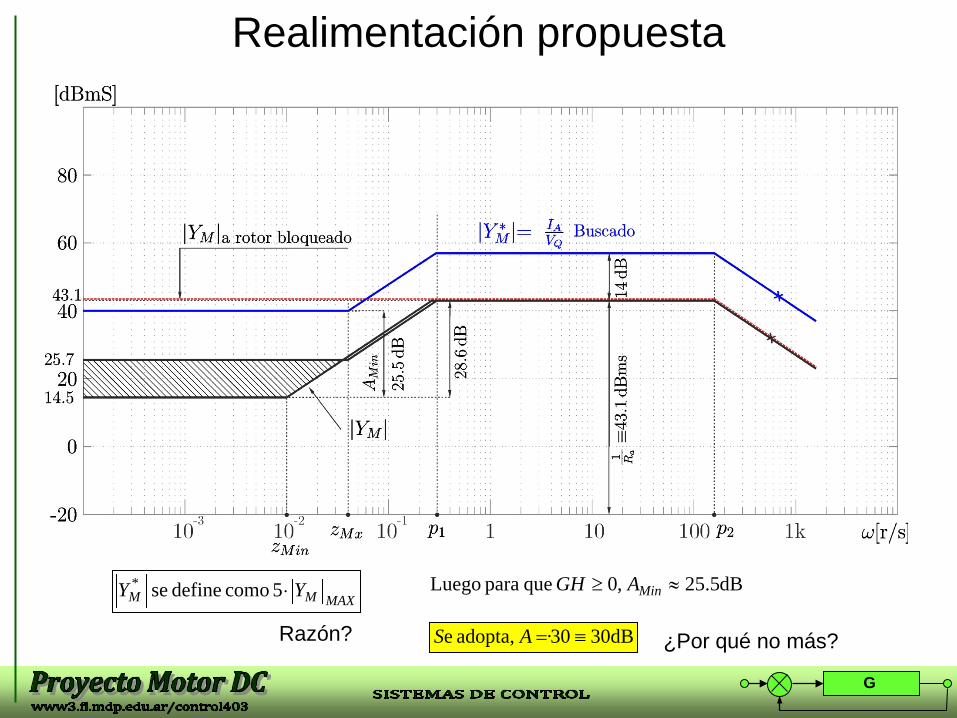
Realimentación propuesta
MAXMM YY ⋅5 como define se *
Razón?
dB5.25 ,0 que para Luego ≈≥ MinAGH
dB3030· adopta, e ≡=AS ¿Por qué no más?
G
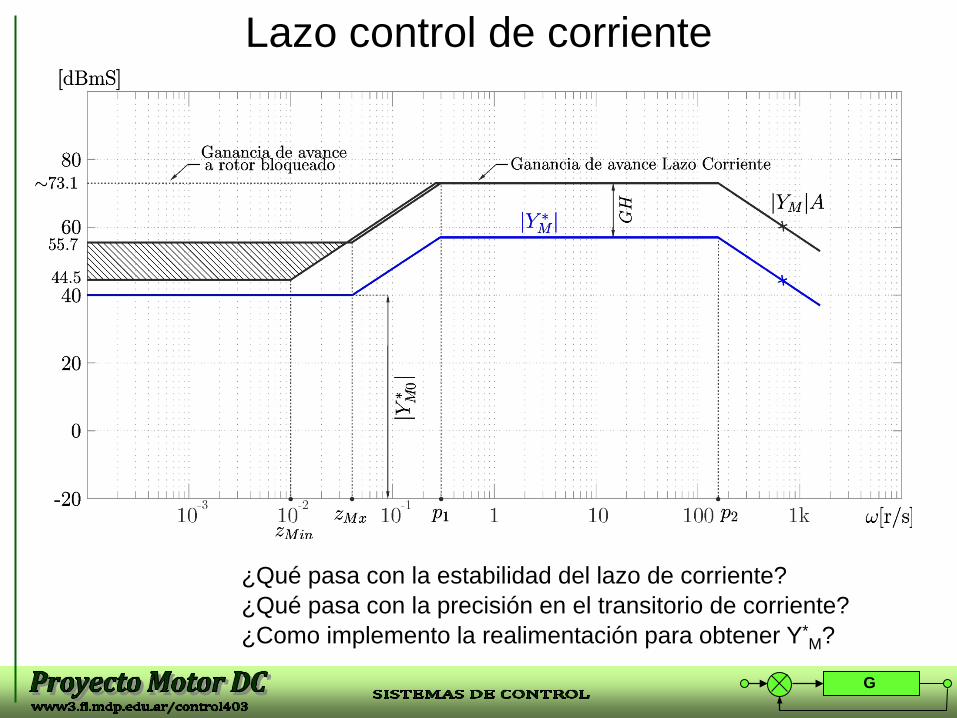
Lazo control de corriente
¿Qué pasa con la estabilidad del lazo de corriente?¿Qué pasa con la precisión en el transitorio de corriente?¿Como implemento la realimentación para obtener Y*
M?
G
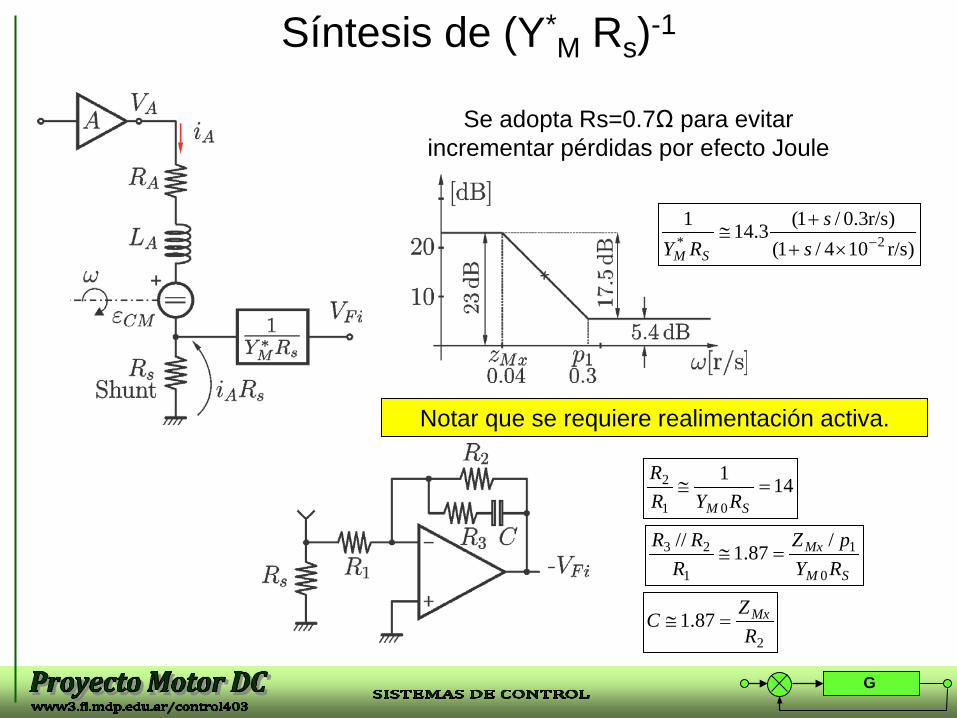
Síntesis de (Y*M Rs)-1
Se adopta Rs=0.7Ω para evitar incrementar pérdidas por efecto Joule
Notar que se requiere realimentación activa.
)r/s104/1()r/s3.0/1(3.141
2* −×++
≅s
sRY SM
141
01
2 =≅SM RYR
R
SM
Mx
RYpZ
RRR
0
1
1
23 /87.1
//=≅
287.1
RZC Mx=≅
G
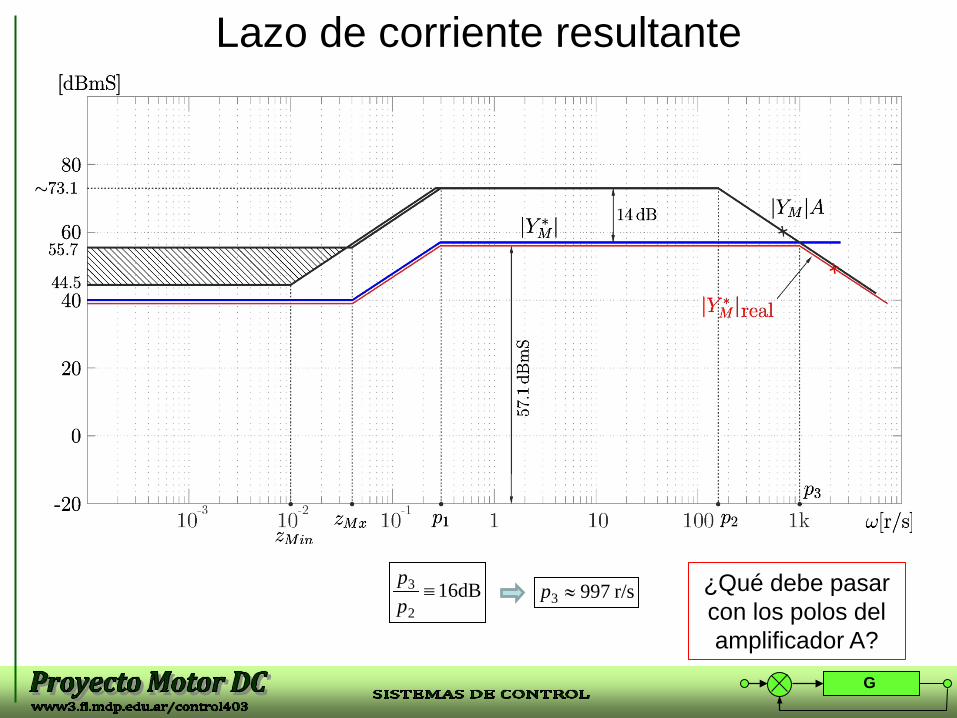
Lazo de corriente resultante
dB162
3 ≡pp
r/s 9973 ≈p ¿Qué debe pasar con los polos del amplificador A?
G
Lazo control de velocidad
+
+
=
+
+
⋅
+
=
58r/s11
r/s3.01
r/Vs 3.5
11
1
1
1)(
212
ssps
ps
kBRk
sV
w
Aw
A
ω30=A
( )[ ]
( )( )( )r/s 997/1r/s 3.0/1
r/s 104/1 S 1.0)/1)(/1(
/1)(2
210
*
sss
pspsZsYsY MM ++
×+=
+++
=−
( ) ( ) ( )5s2 1[As] 104s100 1[As] 10/1 33 ssBsJkB
ksJB
ww
+×+=+=+ −−
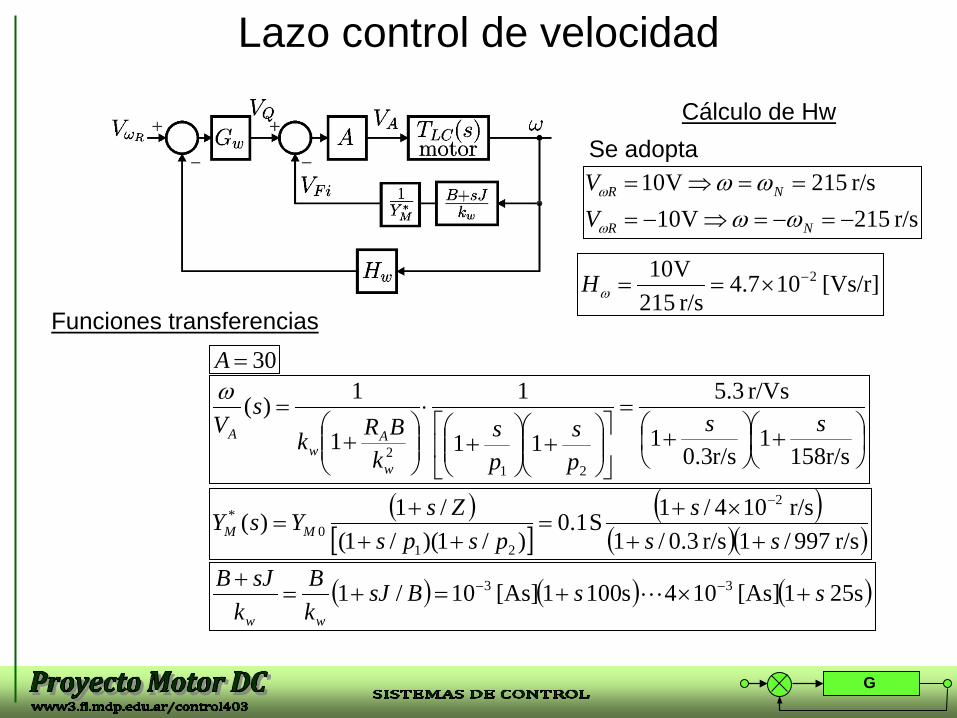
Cálculo de Hw
r/s 215V10r/s 215V10−=−=⇒−=
==⇒=
NR
NR
VV
ωωωω
ω
ω
Se adopta
[Vs/r] 107.4r/s 215V10 2−×==ωH
Funciones transferencias
G
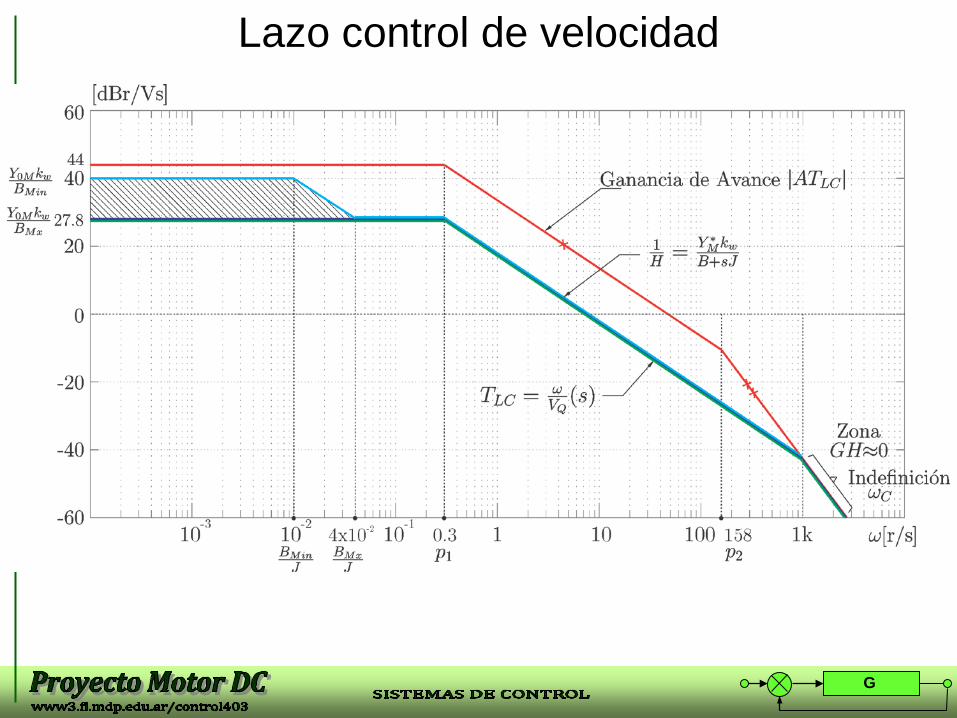
Lazo control de velocidad
G
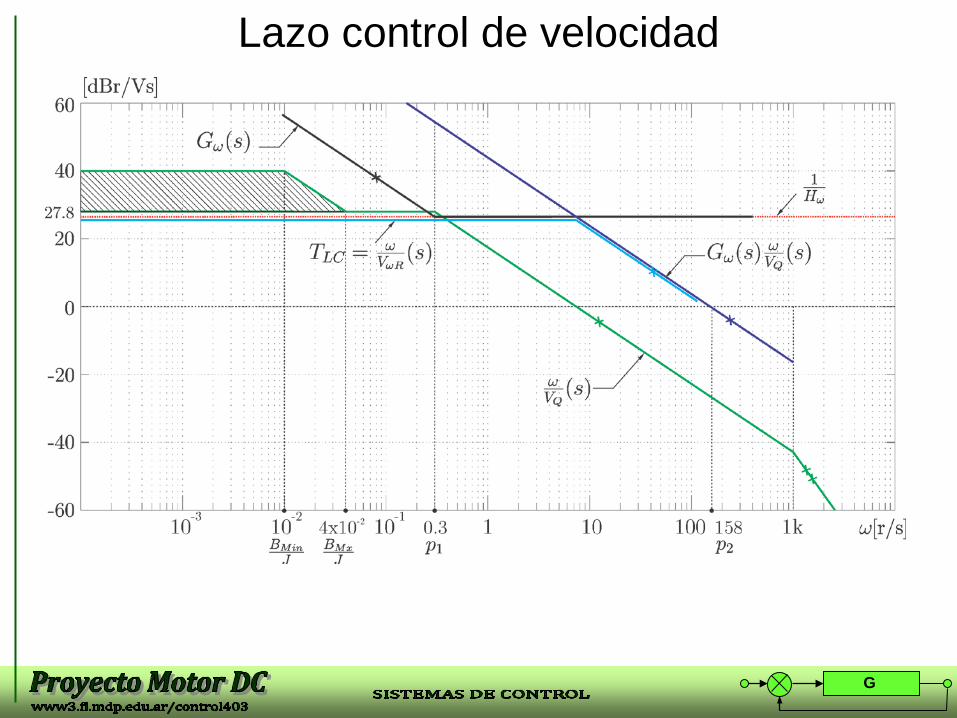
Lazo control de velocidad
G
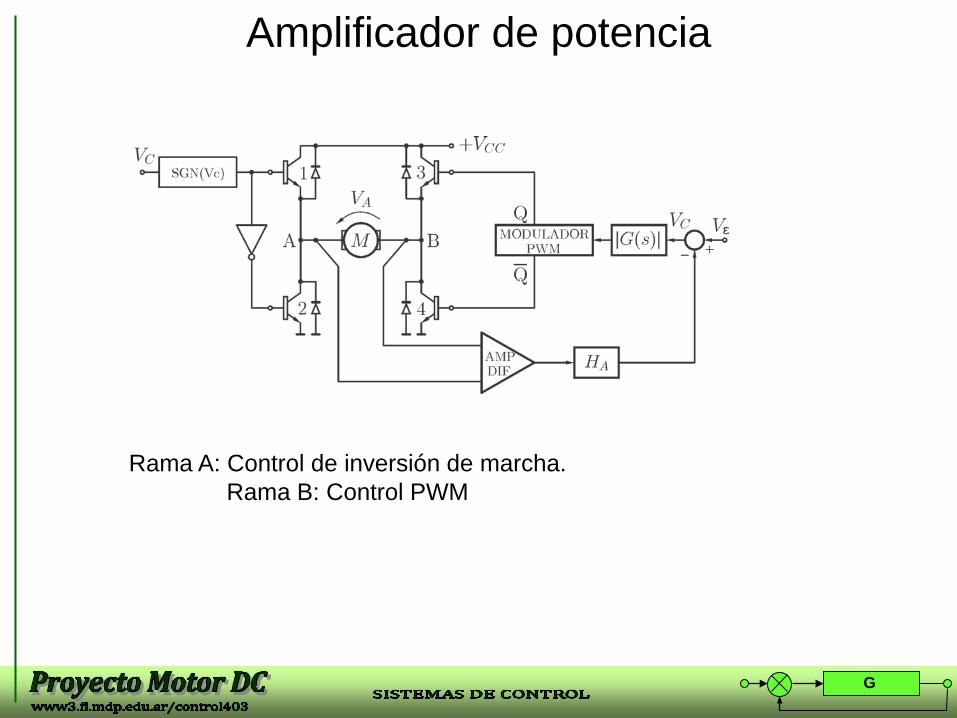
Amplificador de potencia
Rama A: Control de inversión de marcha.Rama B: Control PWM
G
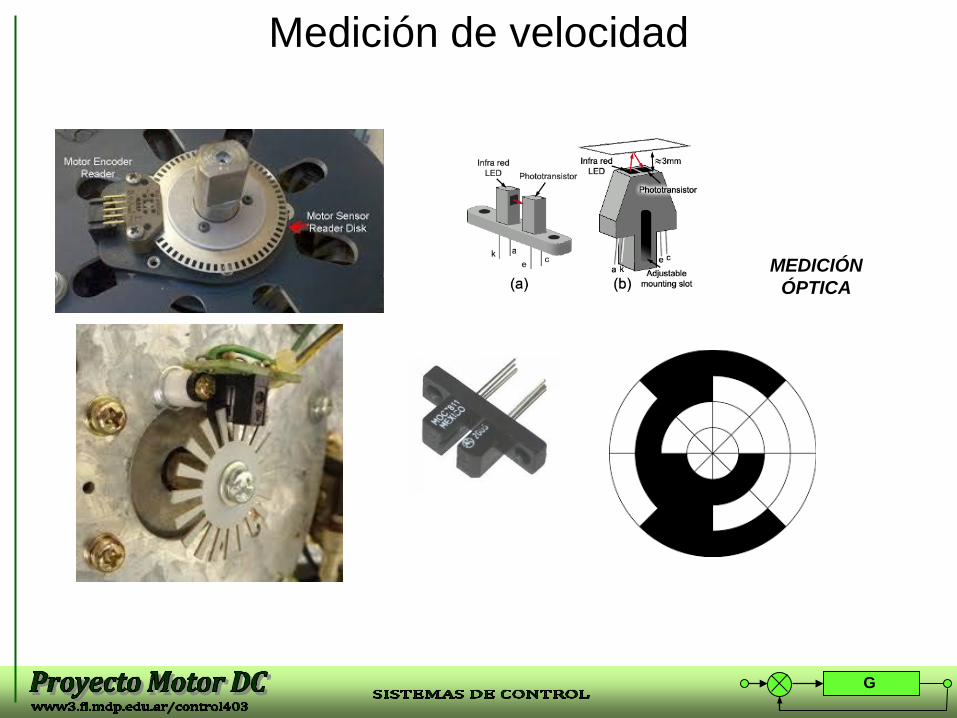
MEDICIÓN ÓPTICA
Medición de velocidad
G
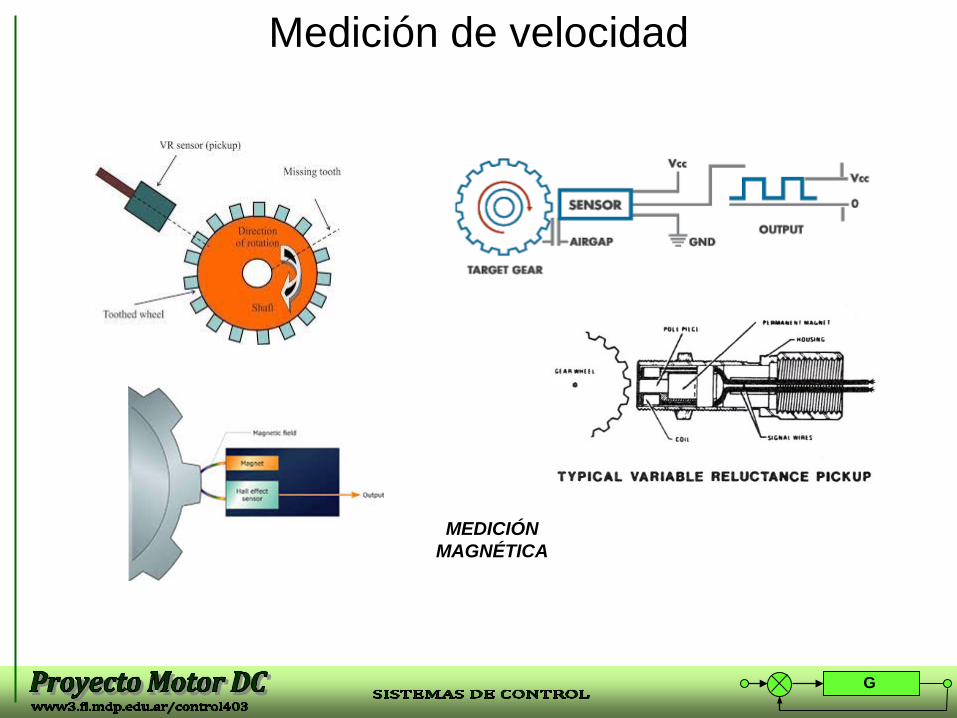
MEDICIÓN MAGNÉTICA
Medición de velocidad
G
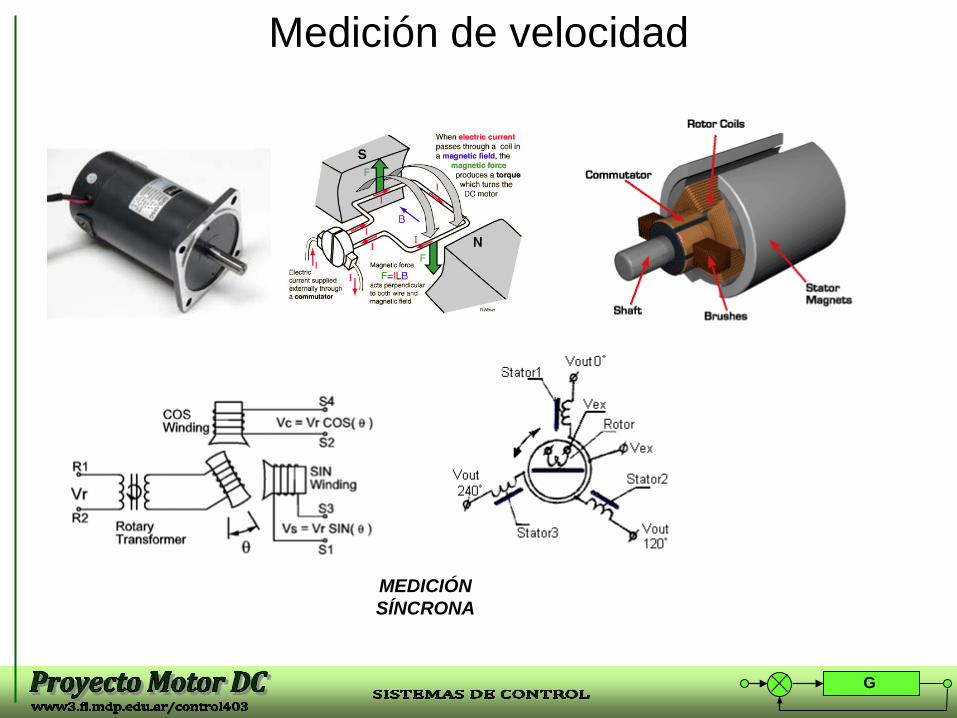
MEDICIÓN SÍNCRONA
Medición de velocidad






![Propiedades y características - [DePa] Departamento de …depa.fquim.unam.mx/amyd/archivero/Radiacion... · 2014-04-21 · dependiente de la fuente de radiación. Velocidad de propagación,](https://static.fdocument.org/doc/165x107/5bab31e709d3f2e74b8b9c8d/propiedades-y-caracteristicas-depa-departamento-de-depafquimunammxamydarchiveroradiacion.jpg)