Mec ánica II - ulpgc. · PDF fileEscuela Técnica Superior de Ingenieros...
7
Click here to load reader
Transcript of Mec ánica II - ulpgc. · PDF fileEscuela Técnica Superior de Ingenieros...

Escuela Técnica Superior de Ingenieros Industriales
Mecánica II
15 - 44
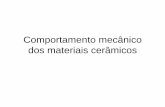
Derivada temporal de un vector respecto un sistema de referencia en rotación
• Sistema OXYZ es fijo
• Sistema Oxyz gira
alrededor del eje fijo OA
con velocidad angular Ωr
• El vector varía en
dirección y magnitud.
( )tQr
( ) kQjQiQQ zyxOxyz
r&
r&
r&&
r++=
• Con respecto al sistema fijo OXYZ,
( ) kQjQiQkQjQiQQ zyxzyxOXYZ&r
&r
&rr
&r
&r
&&r
+++++=
• derivada
respecto del sistema móvil Oxyz
( ) ==++ Oxyzzyx QkQjQiQ &rr
&r
&r
&
• Si estuviera fijo en Oxyz entonces es
equivalente a la velocidad de un punto situado en
el extremo y que perteneciese a un sólido
rígidamente unido al sistema Oxyz
( )OXYZQ&r
QkQjQiQ zyx
rr&r
&r
&r
×Ω=++
Qr
• Con respecto al sistema móvil Oxyz
kQjQiQQ zyx
rrrr++=
• Con respecto al sistema de referencia fijo,
( ) ( ) QQQ OxyzOXYZ
rr&r
&r
×Ω+=
Qr

Escuela Técnica Superior de Ingenieros Industriales
Mecánica II
15 - 45
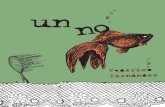
Aceleración Coriolis• El sistema OXY es fijo y el sistema Oxy gira con una
velocidad angular .Ωr
• El vector de posición para la partícula P es el mismo
en ambos sistemas pero su dervada depende del sistema
elegido.
Prr
• La velocidad absoluta de la partícula P es
( ) ( )OxyOXYP rrrv &rr
&rr +×Ω==
• Considere una sección referida al sistema móvil. P’ es
un punto de la sección que corresponde a la posición
instantánea de la partículaP.
( ) == OxyP rv &rr
Fvelocidad de arrastre de P
='Pvr
Velocidad de arrastre P’ de la sección
• La velocidad absoluta para la partícula P será:
FPPP vvvrrr += ′

Escuela Técnica Superior de Ingenieros Industriales
Mecánica II
15 - 46
Aceleración Coriolis
( )FPP
OxyP
vv
rrvrr
&rrr
+=
+×Ω=
′
• La aceleración absoluta para P es
( ) ( )[ ]OxyOXYP rdt
drra &
r&rrr&
rr +×Ω+×Ω=
( ) ( ) ( )OxyOxyP rrrra &&r
&rrrrrr&
rr +×Ω+×Ω×Ω+×Ω= 2
( ) ( )
( )[ ] ( ) ( )OxyOxyOxy
OxyOXY
rrrdt
d
rrr
&rr
&&r
&r
&rrr
&r
×Ω+=
+×Ω=pero
,
( )( )OxyP
P
ra
rra
&&rr
rrrr&rr
=×Ω×Ω+×Ω=′
F
• Utilizando el concepto del punto P’ de la sección
• La aceleración absoluta sérá (arrastre+relativa+coriolis):
( )
( ) 22
2
=×Ω=×Ω=
++=
×Ω++=
′
′
F
F
F
POxyc
cPP
OxyPPP
vra
aaa
raaa
vr&rrr
rrr
&rrrrr
Aceleración Coriolis

Escuela Técnica Superior de Ingenieros Industriales
Mecánica II
15 - 47
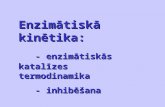
Aceleración Coriolis• Considere un collarín P que desliza con una velocidad relativa
constante u a lo largo de la barra OB. La barra está girando
con una velocidad angular constante ω. El punto A de la barra
corresponde a la posición instantánea de P.
cPAP aaaarrrr ++= F
• La aceleración absoluta del collarín es
( ) 0== OxyP ra &&rr
F
uava cPc ω22 =×Ω= F
rrr
( ) 2ωrarra AA =×Ω×Ω+×Ω= rrrr&rr
donde

Escuela Técnica Superior de Ingenieros Industriales
Mecánica II
15 - 48
Aceleración Coriolis
uvvtt
uvvt
A
A
′+=′∆++=
′rrr
rrr
,at
,at
• El cambio de velocidad con ∆t se representa con la suma de tres vectores:
TTTTRRv ′′′+′′+′=∆r
( ) 2ωrarra AA =×Ω×Ω+×Ω= rrrr&rr
• se debe al cambio de dirección de la
velocidad del punto A de la barra.
AAtt
arrt
vt
TT ====′′
→→2
00limlim ωωω
∆θ∆
∆ ∆∆
TT ′′
• resulta del efecto combinado del
movimiento relativo de P y la rotación de la barra
TTRR ′′′′ and
uuu
t
r
tu
t
TT
t
RR
tt
ωωω∆∆ω
∆θ∆
∆∆ ∆∆
2
limlim00
=+=
+=
′′′+
′→→

Escuela Técnica Superior de Ingenieros Industriales
Mecánica II
15 - 49
Movimiento en 3D. Aceleración de Coriolis
• Con respecto a los ejes fijos OXYZ y ejes móviles Oxyz,
( ) ( ) QQQ OxyzOXYZ
rr&r
&r
×Ω+=
• Considere el movimiento de una partícula P relativoto a un sistema en rotación Oxyz o F (para abreviar).
La velocidad absoluta se puede expresar como,
( )FPP
OxyzP
vv
rrvrr
&rrrr
+=
+×Ω=
′
• La aceleración absoluta se puede expresar como
( ) ( ) ( )
( ) onaccelerati Coriolis 22
2
=×Ω=×Ω=
++=
+×Ω+×Ω×Ω+×Ω=
′
F
F
POxyzc
cPp
OxyzOxyzP
vra
aaa
rrrra
rr&rrr
rrr
&&r
&rrrrrr&
rr

Escuela Técnica Superior de Ingenieros Industriales
Mecánica II
15 - 50
Sistema de Referencia en Movimiento General
Considerar:
- Ejes fijos OXYZ,
- Sistema en traslación AX’Y’Z’, y
- Sistema en traslación y rotaciónAxyz or F.
• Con respecto a OXYZ y AX’Y’Z’,
APAP
APAP
APAP
aaa
vvv
rrr
rrr
rrr
rrr
+=
+=
+=
• La velocidad y aceleración de P relativa a
AX’Y’Z’ se puede poner en términso de la
velocidad y aceleración de P relativa a Axyz.
( )FPP
AxyzAPAPAP
vv
rrvv
rr
&rrrrr
+=
+×Ω+=
′
( )( ) ( )
cPP
AxyzAPAxyzAP
APAPAP
aaa
rr
rraa
rrr
&&r
&rr
rrrr&rrr
++=
+×Ω+
×Ω×Ω+×Ω+=
′ F
2