LTM4653 (Rev 0) - analog.com · LTM4653 Rev 0 For more information 48V 0 0 5V,,,
1
LEZIONE 9 LE VERIFICHE DI SICUREZZA
Il dimensionamento di una struttura e, conseguentemente, i costi ed i rischi connessi
alla sua realizzazione, dipendono dalla MISURA DELLA SICUREZZA
Un aspetto importante e delicato per il progettista è quello che riguarda la
connessione tra scelte di progetto e misura della sicurezza.
Per pervenire ad un efficace misura della sicurezza occorre esaminare:
− Gli aspetti di comportamento della struttura;
− Le fonti di incertezza;
− Il carattere aleatorio delle grandezze in gioco.
ASPETTI DI COMPORTAMENTO
Nella letteratura e negli Eurocodici gli aspetti di comportamento della struttura
vengono indicati come Stati Limite, intendendo con essi:
“una condizione, raggiunta la quale, la struttura o una sua parte
non svolge più le funzioni per le quali è stata realizzata”
Stato limite ultimo COLLASSO
Stato limite di esercizio DEF. ECCESSIVE, CEDIMENTI DIFF.,
ROT. RIGIDE

2
FONTI DI INCERTEZZA
Esse sono molteplici e, spesso, difficilmente individuabili.
Operativamente si possono racchiudere in:
− Caratteristiche dei materiali;
− Azioni applicate;
− Dimensioni geometriche;
− Differenza tra valori effettivi e valori di calcolo (incertezza di modello).
ALEATORIETA’ DELLE GRANDEZZE
A rigore sarebbe richiesta un’analisi probabilistica del margine di sicurezza con
difficoltà che rendono poco praticabile la misura della sicurezza nelle applicazioni
correnti.
FATTORE DI SICUREZZA
Nell’Ingegneria Civile la misura della sicurezza viene, convenzionalmente, espressa
attraverso un fattore di sicurezza FS, dato dal rapporto tra la resistenza R e la
sollecitazione S.
SRFS =
I valori di R ed S utilizzati per il calcolo di FS sono puramente nominali, calcolati in
base all’esperienza.
Non sono generalmente valori medi, bensì piuttosto estremi.
Quando si fa riferimento ai valori medi il coefficiente di sicurezza viene detto
Coefficiente di Sicurezza Centrale
][][
SERECFS
def=
Questo significa che, anche quando si è in presenza di un accettabile valore di FS o
CFS può sussistere una certa probabilità di rottura.

3
STATO DI EQUILIBRIO LIMITE ATTIVO E PASSIVO
STATI DI EQUILIBRIO LIMITE IN UN MEZZO NON COESIVO DELIMITATO DA UN PIANO
ORIZZONTALE
Consideriamo una massa di terreno omogeneo, con parametri di resistenza al taglio
c’ = 0 e φ’ ≠ 0 e peso unitario efficace γ’.
Alla generica profondità z lo stato pensionale è individuato dalle tensioni verticale
ed orizzontale, che sono tensioni principali.
Se tale stato è lontano dalla rottura, esso è staticamente indeterminato. (∞ σ’h)
Il rapporto tra la pressione orizzontale σ’h0 (detta pressione a riposo) e quella
verticale σ’v0 è noto come coefficiente di spinta a riposo K0.
'0
'0
0v
hKσσ
=

4
Esso dipende dalla natura del terreno e dalla storia tensionale che ha interessato il
deposito.
A rottura, invece, esistono soltanto due cerchi di Mohr che soddisfano
contemporaneamente le condizioni di equilibrio e di rottura; queste due situazioni di
equilibrio limite o plastico possono essere raggiunte seguendo due diversi
meccanismi di deformazione.
Immaginiamo di produrre un’espansione laterale del provino, allontanando le due
pareti verticali.
Si ottiene: σ’h con σ’v0 costante.
5
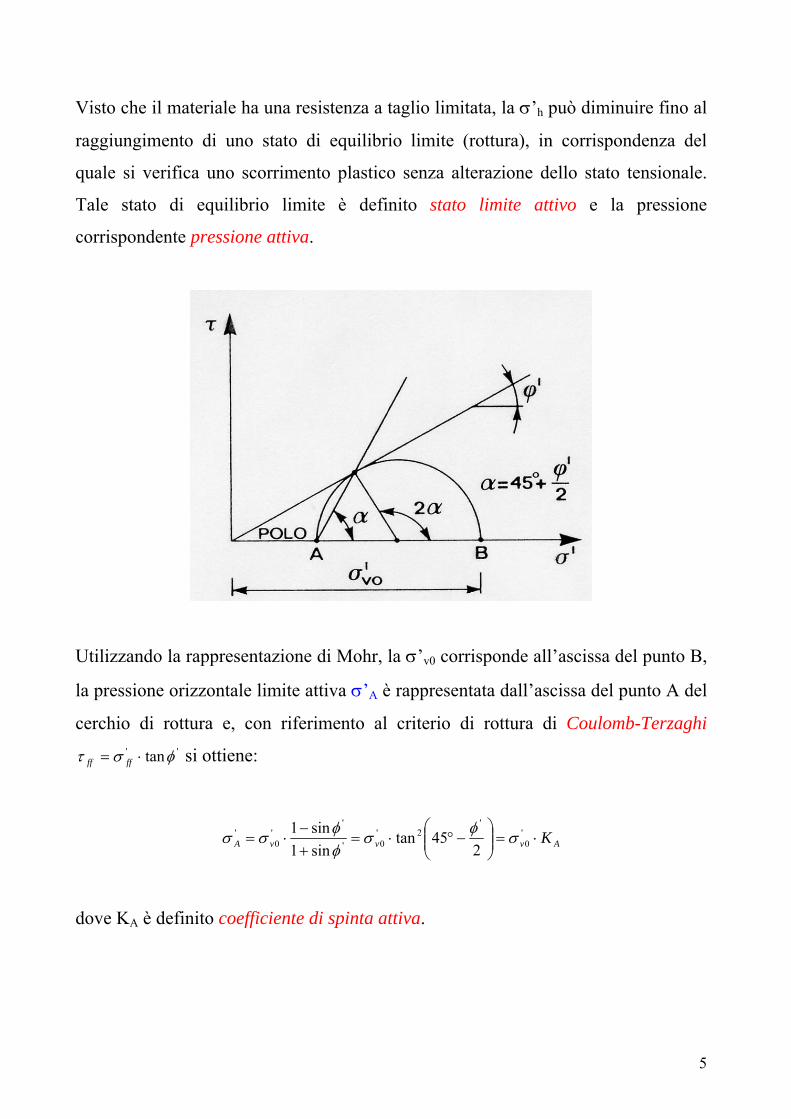
Visto che il materiale ha una resistenza a taglio limitata, la σ’h può diminuire fino al
raggiungimento di uno stato di equilibrio limite (rottura), in corrispondenza del
quale si verifica uno scorrimento plastico senza alterazione dello stato tensionale.
Tale stato di equilibrio limite è definito stato limite attivo e la pressione
corrispondente pressione attiva.
Utilizzando la rappresentazione di Mohr, la σ’v0 corrisponde all’ascissa del punto B,
la pressione orizzontale limite attiva σ’A è rappresentata dall’ascissa del punto A del
cerchio di rottura e, con riferimento al criterio di rottura di Coulomb-Terzaghi '' tanφστ ⋅= ffff si ottiene:
AvvvA K⋅=⎟⎟⎠
⎞⎜⎜⎝
⎛−°⋅=
+−
⋅= '0
'2'
0'
''0
'
245tan
sin1sin1 σφσ
φφσσ
dove KA è definito coefficiente di spinta attiva.
6
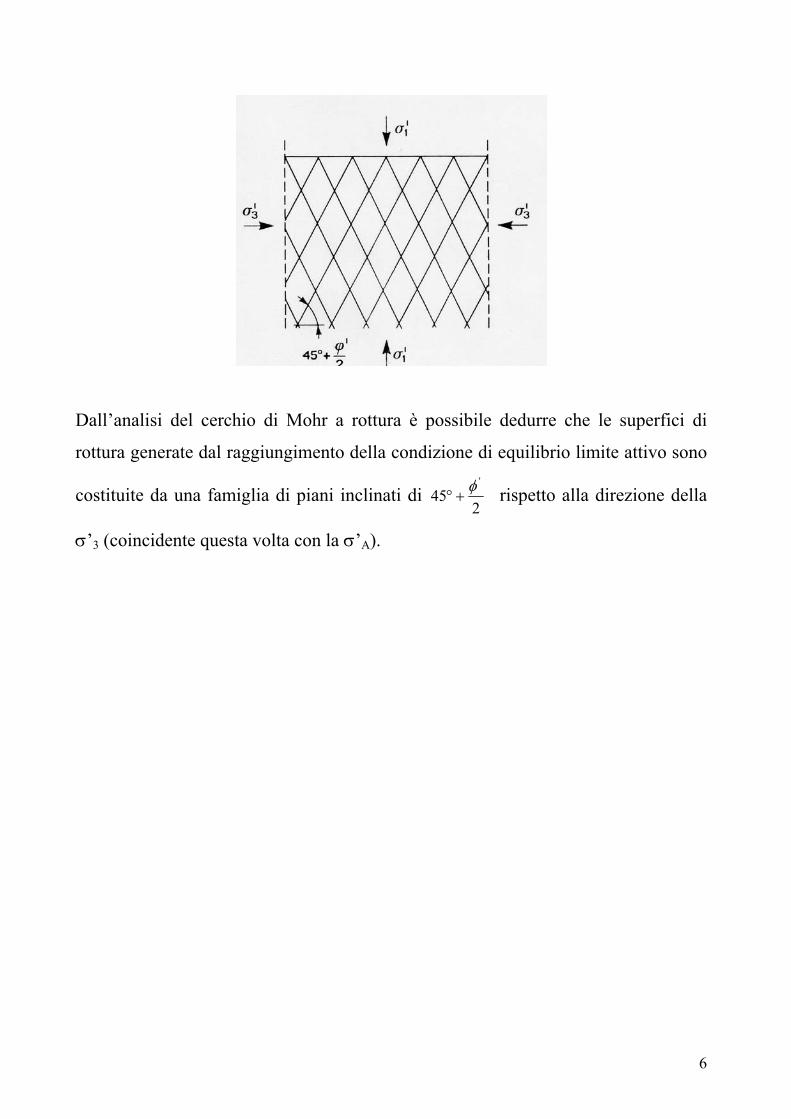
Dall’analisi del cerchio di Mohr a rottura è possibile dedurre che le superfici di
rottura generate dal raggiungimento della condizione di equilibrio limite attivo sono
costituite da una famiglia di piani inclinati di 2
45'φ
+° rispetto alla direzione della
σ’3 (coincidente questa volta con la σ’A).
7
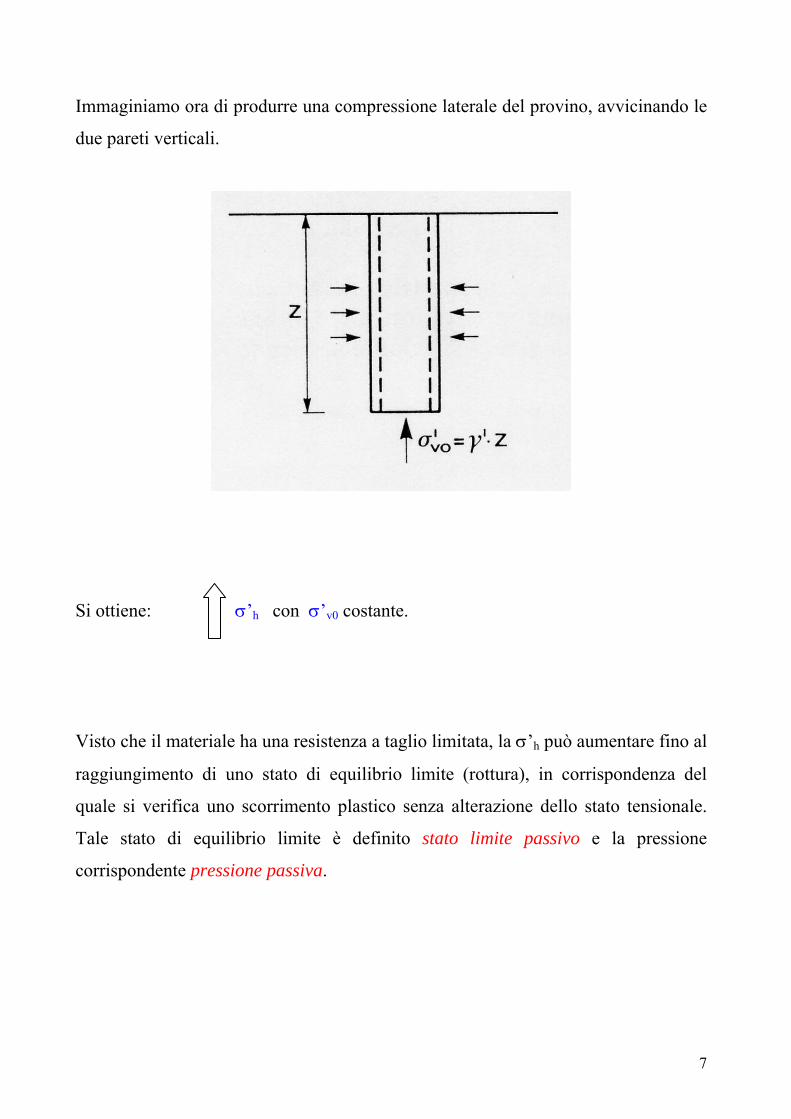
Immaginiamo ora di produrre una compressione laterale del provino, avvicinando le
due pareti verticali.
Si ottiene: σ’h con σ’v0 costante.
Visto che il materiale ha una resistenza a taglio limitata, la σ’h può aumentare fino al
raggiungimento di uno stato di equilibrio limite (rottura), in corrispondenza del
quale si verifica uno scorrimento plastico senza alterazione dello stato tensionale.
Tale stato di equilibrio limite è definito stato limite passivo e la pressione
corrispondente pressione passiva.
8
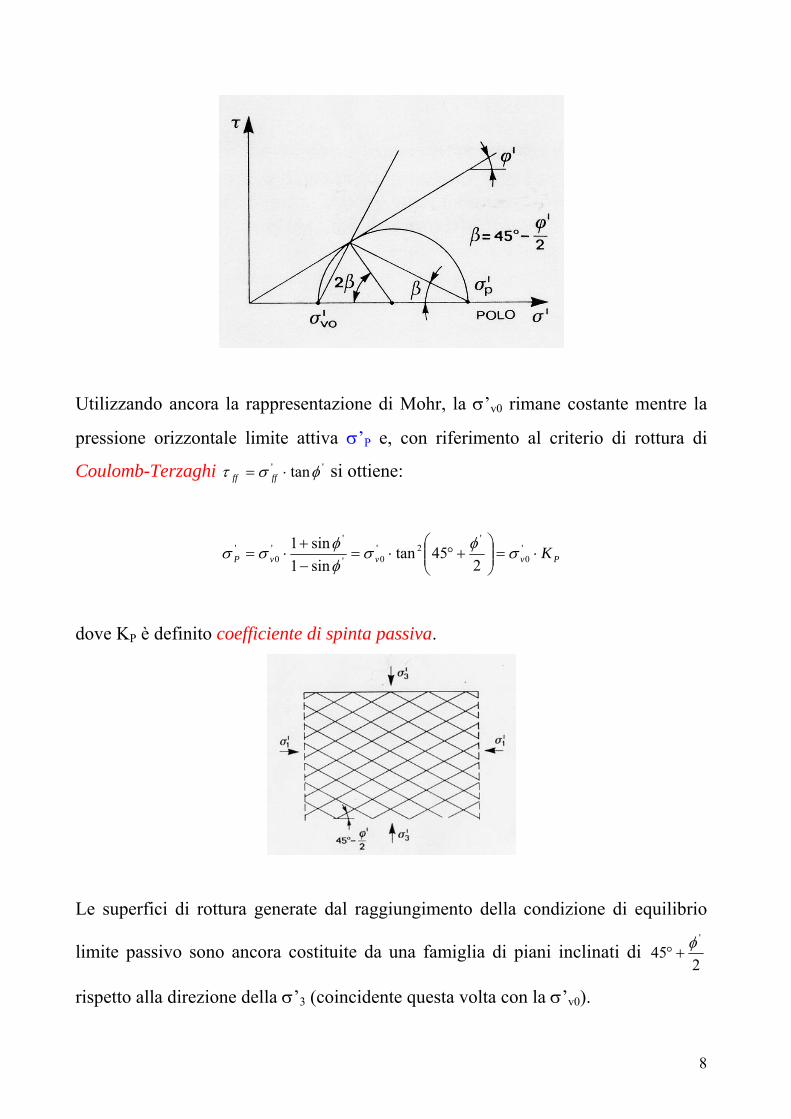
Utilizzando ancora la rappresentazione di Mohr, la σ’v0 rimane costante mentre la
pressione orizzontale limite attiva σ’P e, con riferimento al criterio di rottura di
Coulomb-Terzaghi '' tanφστ ⋅= ffff si ottiene:
PvvvP K⋅=⎟⎟⎠
⎞⎜⎜⎝
⎛+°⋅=
−+
⋅= '0
'2'
0'
''0
'
245tan
sin1sin1 σφσ
φφσσ
dove KP è definito coefficiente di spinta passiva.
Le superfici di rottura generate dal raggiungimento della condizione di equilibrio
limite passivo sono ancora costituite da una famiglia di piani inclinati di 2
45'φ
+°
rispetto alla direzione della σ’3 (coincidente questa volta con la σ’v0).

9
Sulla base della loro definizione, i coefficienti KA e KP, trascurando le differenze
eventualmente indotte da diversi stress-path, sono legati dalla relazione:
1=⋅ PA KK
Poiché il problema della determinazione dello stato tensionale associato alle due
situazioni limite illustrate è stato risolto per la prima volta da Rankine (1857), gli
stati di equilibrio plastico sono di solito indicati come stato attivo o passivo di
Rankine.
10
STATO DI EQUILIBRIO LIMITE IN UN MEZZO NON COESIVO DELIMITATO DA UN PIANO
INCLINATO
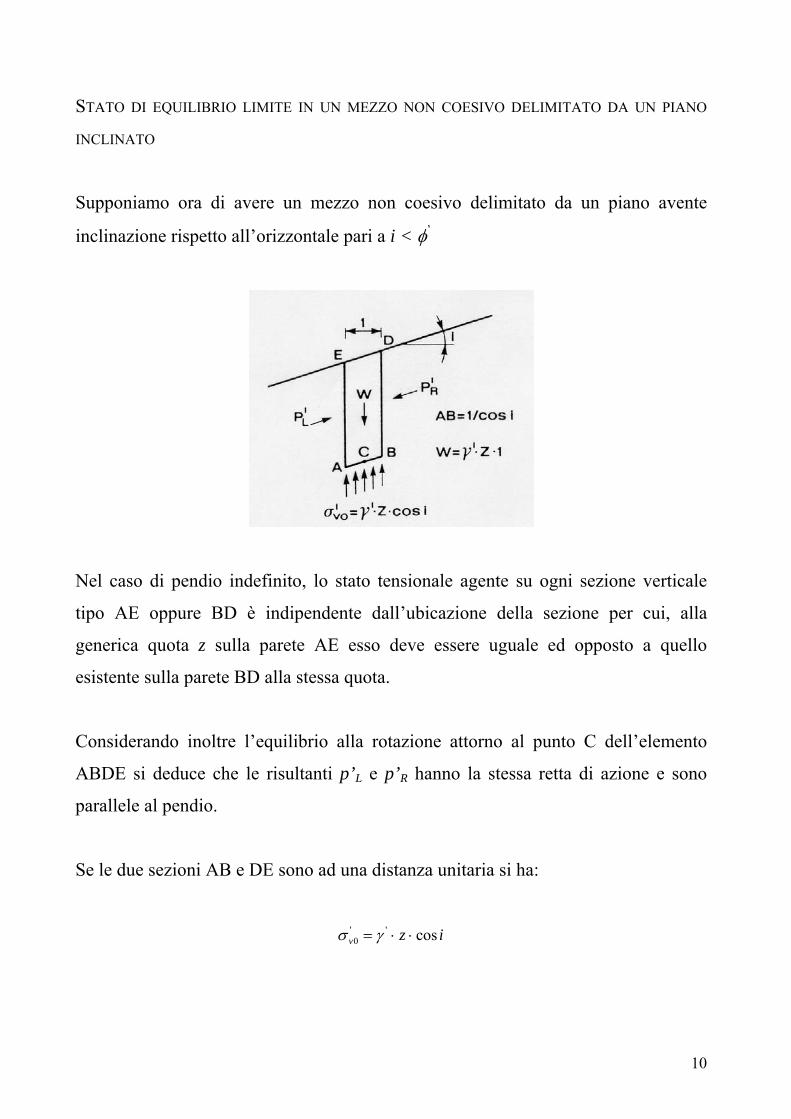
Supponiamo ora di avere un mezzo non coesivo delimitato da un piano avente
inclinazione rispetto all’orizzontale pari a i < φ’
Nel caso di pendio indefinito, lo stato tensionale agente su ogni sezione verticale
tipo AE oppure BD è indipendente dall’ubicazione della sezione per cui, alla
generica quota z sulla parete AE esso deve essere uguale ed opposto a quello
esistente sulla parete BD alla stessa quota.
Considerando inoltre l’equilibrio alla rotazione attorno al punto C dell’elemento
ABDE si deduce che le risultanti p’L e p’R hanno la stessa retta di azione e sono
parallele al pendio.
Se le due sezioni AB e DE sono ad una distanza unitaria si ha:
izv cos''0 ⋅⋅= γσ

11
e le componenti normale e tangenziale ad AB valgono:
iizizsincos
cos'
2''
⋅⋅⋅=
⋅⋅=
γτ
γσ
Lo stato tensionale a rottura è rappresentato da un cerchio di Mohr passante per il
punto M (σ’,τ) e tangente all’inviluppo di rottura.
L’origine dei piani è rappresentata dal punto P e l’inclinazione delle superfici di
rottura dalle due rette a e b.
Lo stato tensionale limite agente sulla parete verticale è dato dalle coordinate del
punto A. Il segmento OA rappresenta il valore della pressione limite attiva σ’A
agente sulla parete verticale. Valgono inoltre le seguenti relazioni:
'
'
''0
sinsin
cos
φ
σ
γσ
⋅=
⋅==
⋅⋅==
OCMCiOCNC
OA
izOM
A
v

12
da cui si ottiene:
ed ancora:
5,0'22
5,0'22'0
'
)cos(coscos)cos(coscos
φφσσ
−+−−
⋅=iiii
vA
Analogamente, nel caso del raggiungimento dello stato limite passivo, l’origine dei
piani è rappresentata dal punto P, l’inclinazione delle superfici di rottura è data dalle
rette a e b e lo stato tensionale sulla parete verticale è individuato dalle coordinate
del punto T.
Anche in questo caso σ’P è parallela al pendio ed il suo modulo è dato da OT, per
cui:
5,0'22
5,0'22'0
'
)cos(coscos)cos(coscos
φφσσ
−−−+
⋅=iiii
vP
5,022'22
5,022'22
'0
'
)sinsin(cos)sinsin(cos
iOCOCiOCiOCOCiOC
MNONMNON
v
A
⋅−⋅+⋅⋅−⋅−⋅
=+−
=φφ
σσ

13
STATO DI EQUILIBRIO LIMITE IN UN MEZZO DOTATO DI COESIONE ED ATTRITO
Nel caso di un mezzo con f’ > 0 e c’ > 0, la condizione di equilibrio limite espressa
in termini di tensioni principali diventa:
''
''
'3
'1
'3
'1 sin
sincos
22φ
φφσσσσ
⋅⎟⎟⎠
⎞⎜⎜⎝
⎛⋅+
+=
−c
che porta ad ottenere:
( ) 5,0''3
''
'2'
3'1 2
245tan2
245tan PP KcKc ⋅+⋅=⎟⎟
⎠
⎞⎜⎜⎝
⎛+°⋅+⎟⎟
⎠
⎞⎜⎜⎝
⎛+°⋅= σφφσσ
Se il mezzo è delimitato da un piano orizzontale i valori limite della tensione
orizzontale diventano pertanto:
( )( ) 5,0''
0'
5,0''0
'
2
2
PPvP
AAvA
KcK
KcK
−⋅=
−⋅=
σσ
σσ
14
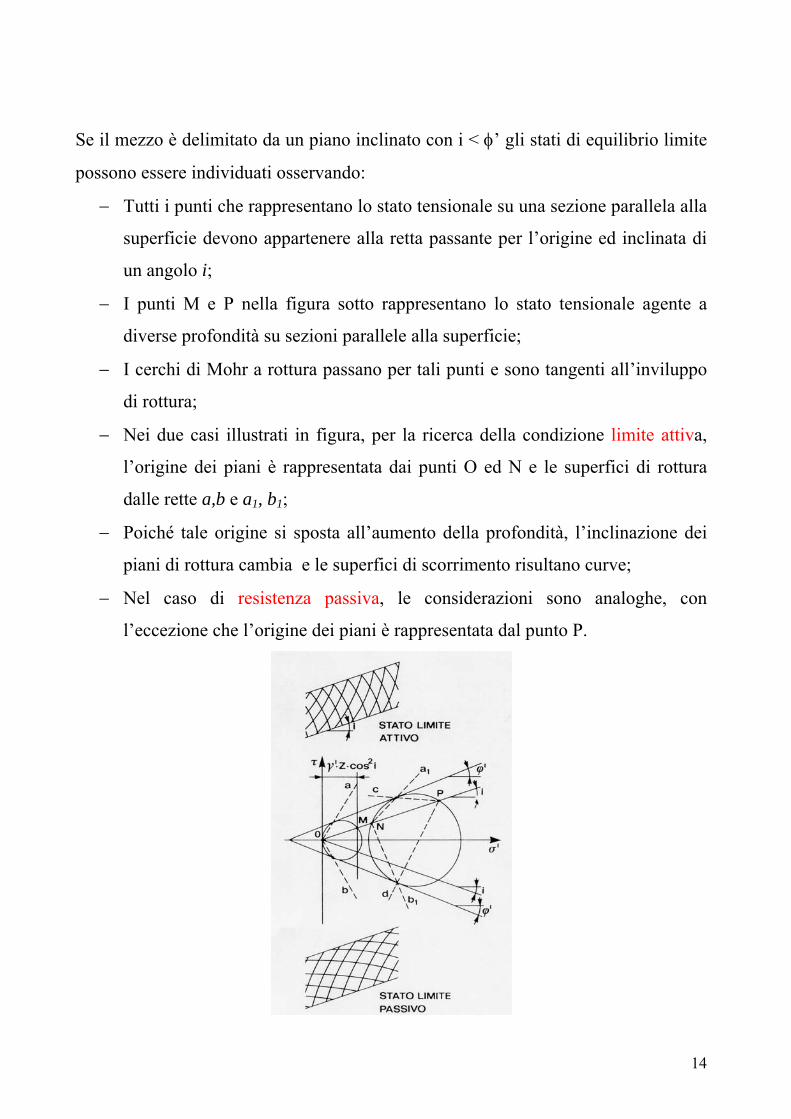
Se il mezzo è delimitato da un piano inclinato con i < φ’ gli stati di equilibrio limite
possono essere individuati osservando:
− Tutti i punti che rappresentano lo stato tensionale su una sezione parallela alla
superficie devono appartenere alla retta passante per l’origine ed inclinata di
un angolo i;
− I punti M e P nella figura sotto rappresentano lo stato tensionale agente a
diverse profondità su sezioni parallele alla superficie;
− I cerchi di Mohr a rottura passano per tali punti e sono tangenti all’inviluppo
di rottura;
− Nei due casi illustrati in figura, per la ricerca della condizione limite attiva,
l’origine dei piani è rappresentata dai punti O ed N e le superfici di rottura
dalle rette a,b e a1, b1;
− Poiché tale origine si sposta all’aumento della profondità, l’inclinazione dei
piani di rottura cambia e le superfici di scorrimento risultano curve;
− Nel caso di resistenza passiva, le considerazioni sono analoghe, con
l’eccezione che l’origine dei piani è rappresentata dal punto P.