Lecture 6.3 Optimizing over poses
20
TEK5030 Lecture 6.3 Optimizing over poses Trym Vegard Haavardsholm
Transcript of Lecture 6.3 Optimizing over poses

TEK5030
Lecture 6.3 Optimizing over poses
Trym Vegard Haavardsholm

TEK5030
Nonlinear state estimation
We have seen how we can find the MAP estimate of our unknown states given measurements by representing it as a nonlinear least squares problem
2olve argminS∗ ← −Δ
Δ AΔ b
, Linearize at tX←A b
1t tX X+ ∗← +Δ2
0Choose a suitable inital estimate X
2
1argmin ( )
i
m
i i iX i
X h X∗
=
= −∑ Σz
argmax ( | )MAP
XX p X Z=

TEK5030
The indirect tracking method
3
2argmin ( )
cw
wcw cw i i
iπ∗ = −∑
TT T x u
Minimize geometric error over the camera pose

TEK5030
Rotations and poses are Lie groups
Rotations in 3D: Poses in 3D:

TEK5030
Rotations and poses are Lie groups
Rotations in 3D: Poses in 3D:
Rotations and poses are not vector spaces! (They lie on manifolds)

TEK5030
Nonlinear state estimation
We have seen how we can find the MAP estimate of our unknown states give measurements by representing it as a nonlinear least squares problem
2olve argminS∗ ← −Δ
Δ AΔ b
, Linearize at tX←A b
1t tX X+ ∗← +Δ6
0Choose a suitable inital estimate X
2
1argmin ( )
i
m
i i iX i
X h X∗
=
= −∑ Σz
argmax ( | )MAP
XX p X Z=
Rotations and poses are not vector spaces! (They lie on manifolds) How do we optimize?

TEK5030
The corresponding Lie algebra
Rotations in 3D:

TEK5030
The corresponding Lie algebra
Rotations in 3D: Remember the axis-angle representation:
𝜙𝜙
𝐯𝐯
( )cos 1 cos sinTab φ φ φ ∧= + − +R I vv v

TEK5030
The corresponding Lie algebra
Rotations in 3D: Remember the axis-angle representation:
( )cos 1 cos sinTab φ φ φ ∧= + − +R I vv v 𝜙𝜙
𝐯𝐯 When 𝜙𝜙 is small: cos 𝜙𝜙 ≈ 1 sin 𝜙𝜙 ≈ 𝜙𝜙

TEK5030
( )cos 1 cos sinTab φ φ φ
φ
∧
∧ ∧
= + − +
≈ + = +
R I vv v
I v I ω
The corresponding Lie algebra
Rotations in 3D: Remember the axis-angle representation:
𝜙𝜙
𝐯𝐯 When 𝜙𝜙 is small: cos 𝜙𝜙 ≈ 1 sin 𝜙𝜙 ≈ 𝜙𝜙

TEK5030
The corresponding Lie algebra
Rotations in 3D: Poses in 3D:

TEK5030
The corresponding Lie algebra
Rotations in 3D: Poses in 3D:
The corresponding Lie algebras
are vector spaces!

TEK5030
We can relate the group and algebra through the matrix exponential and matrix logarithm
Relation between group and algebra

TEK5030
We can relate the group and algebra through the matrix exponential and matrix logarithm
Relation between group and algebra

TEK5030
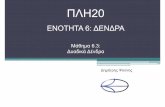
Tangent space
The Lie algebra is the tangent space around the identity element of the group • The tangent space is the “optimal” space
in which to represent differential quantities related to the group
• The tangent space is a vector space with the same dimension as the number of degrees of freedom of the group transformations
Dellaert, F., & Kaess, M. (2017). Factor Graphs for Robot Perception

TEK5030
Perturbations
We can represent steps and uncertainty as perturbations in the tangent space
exp( )∧=T ξ T
exp( )∧=R ω R

TEK5030
Jacobians for perturbations on SO(3)
( )exp( )[ ]
∧∧
=
∂ ⊕= − ⊕
∂ω 0
ω R xR x
ω
( )exp( )∧∂ ⊕ ∂ ⊕= =
∂ ∂
ω R x R x Rx x
⊕ =R x RxGroup action on points:

TEK5030
Jacobians for perturbations on SE(3)
( )3 3
exp( )[ ]
∧∧
×
=
∂ ⊕ = − ⊕ ∂
ξ 0
ξ T xI T x
ξ
( )exp( )∧∂ ⊕ ∂ ⊕= =
∂ ∂
ξ T x T x Rx x
⊕ = +T x Rx tGroup action on points:

TEK5030
Summary
• Updates on rotations and poses as perturbations using Lie algebra
• Jacobians for these perturbations
• We are ready to solve
19
exp( )∧=R ω R
exp( )∧=T ξ T
2argmin ( )
cw
wcw cw i i
iπ∗ = −∑
TT T x u

TEK5030
Supplementary material
• Ethan Eade, “Lie Groups for 2D and 3D transformations” • José Luis Blanco Claraco, “A tutorial on SE(3) transformation
parameterizations and on-manifold optimization”
Chapter 7