Kontinuumsmechanik Wintersemster 2016/17 · 4 Kontinuumsmechanik WS 16/17 Verfahren, wie etwa der...
98
Kontinuumsmechanik Wintersemster 2016/17 Prof. Dr.-Ing. Stefan Diebels Universit¨ at des Saarlandes Lehrstuhl f¨ ur Technische Mechanik Version vom 3.12.2016 !!!Diese Version ist eine α-Version!!!
Transcript of Kontinuumsmechanik Wintersemster 2016/17 · 4 Kontinuumsmechanik WS 16/17 Verfahren, wie etwa der...

Kontinuumsmechanik
Wintersemster 2016/17
Prof. Dr.-Ing. Stefan DiebelsUniversitat des Saarlandes
Lehrstuhl fur Technische Mechanik
Version vom 3.12.2016!!!Diese Version ist eine α-Version!!!

Inhaltsverzeichnis
1 Einleitung 1
2 Lineare Elastizitatstheorie 9
2.1 Der materielle Korper . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2 Geometrisch lineare Kinematik . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3 Massen-, Impuls- und Drallbilanz . . . . . . . . . . . . . . . . . . . . . . . 18
2.4 Das verallgemeinerte Hookesche Gesetz . . . . . . . . . . . . . . . . . . . . 28
3 Tensorrechnung 35
3.1 Tensoralgebra . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.2 Tensoranalysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4 Große Deformationen 49
4.1 Bewegungsfunktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.2 Geschwindigkeit und Beschleunigung . . . . . . . . . . . . . . . . . . . . . 51
4.3 Materielle Zeitableitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.4 Transport materieller Linien, Flachen, Volumen . . . . . . . . . . . . . . . 54
4.5 Deformations- und Verzerrungstensoren . . . . . . . . . . . . . . . . . . . . 58
4.6 Darstellung mittels Verschiebungsgradient . . . . . . . . . . . . . . . . . . 60
4.7 Geschwindigkeitsgradient . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
4.8 Bilanzgleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.9 Massenbilanz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.10 Impulsbilanz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
4.11 Drallbilanz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5 Linearisierung 75
6 Rheologie 81
i
7 Materialmodelle 91
7.1 Lineare Elastizitat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
7.2 Lineare Viskoelastizitat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
7.3 Plastizitat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
7.4 Viskoplastizitat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
7.5 Schadigung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
ii
α-Version vom 3.12.2016 1
1 Einleitung
Die Mechanik allgemein beschaftigt sich mit der Beschreibung der Bewegung von Korpernunter der Wirkung von Kraften. In der Kontinuumsmechanik werden die Korper als konti-nuierlich im Raum verteilt und als deformierbar angesehen. Die Gebiete der Punktmechanikund der Starrkorpermechanik sind als Sonderfalle eingeschlossen. Die Agregatzustande fest,flussig, gasformig der betrachteten Korper sind grundsatzlich beliebig.
Die Mechanik ist einer der altesten Teile der klassischen Physik. Die folgende Tabelle gibteine exemplarische Aufstellung von Wissenschaftlern, die sich mit mechanischen Problem-stellung befasst haben und ordnet sie geschichtlich ein. Die wesentlichen Aussagen, aufdenen mechanische Untersuchungen aufbauen, sind demnach schon lange bekannt. Trotz-dem ist die Kontinuumsmechanik aus der heutigen Technik nicht wegzudenken, denn siestellt die Grundlage fr die Simulationsmethoden, ohne die eine schnelle und effektive Pro-duktentwicklung nicht moglich ist.
Archimedes von Syrakus 287–221 v. Chr.Hebelgesetze, Auftrieb (Archime-disches Prinzip)
1492 Entdeckung Amerikas durchChristoph Kolumbus
1517 Anschlag von Martin LuthersThesen an der Schloßkirche zuWittenberg
Simon Stevin 1548/49–1620KrafteparallelogrammJohannes Kepler 1571–1630Plantenbewegung (KeplerscheGesetze)Galileo Galilei 1564–1641Bewegung auf der schiefen Ebe-ne, beschleunigte Bewegung,Tragheitsprinzip, Festigkeit vonBalkenRobert Hooke 1635–1703)Plantenbewegung, Schwerkraft,Mechanische Federn (HookeschesGesetz)
1618–1648 Dreißigjahriger KriegSir Isaac Newton 1643–1726

2 Kontinuumsmechanik WS 16/17
Newtonsche Axiome (Behar-rungsatz, Impulssatz, Wechsel-wirkungsprinzip), Infinitesimal-rechnung (im Streit mit GottfriedWilhelm Leibniz)
1683 2. Belagerung Wiens durch dieTurken
1685 Grundung der Dillinger HutteLeonhard Euler 1707–1783Hydrodynamik (Eulersche Glei-chungen), Kreiseldynamik (Eu-lersche Kreiselgleichungen), Sta-bilittstheorie (Eulerscher Knick-stab)Charles Augustin de Cou-lomb
1736–1806
Bodenmechanik, Reibung in Flui-den, Haftreibung (Coulombrei-bung)
1748 Grundung Villeroy & BochFederico Luigi Conte diMenabrea
1809–1896
Angewandte Mechanik (Satz vonMenabrea)Joseph-Louis Lagrange 1736–1813Analytische Mechank (Lagrange-Gleichungen)Carlo Alberto Castigliano 1847–1884Baustatik (Satz von Castigliano)
1756–1791 Wolfgang Amadeus MozartClaude Louis Marie HenrieNavier
1785-1836
Elastizitatstheorie (Lame-Navier-Gleichungen)
1789 Beginn der franzosischen Revolu-tion
Augustin-Louis Cauchy 1789–1857Elastizitatstheorie, Spannungs-tensor (Cauchy-Theorem)
Henrie Edouard Tresca 1814–1885Festigkeitshypothesen 1848/49 Deutsche Revolution
1861 Beginn des AmerikanischenBurgerkriegs
α-Version vom 3.12.2016 3
1886 Carl Benz Patent-MotorwagenNr. 1
Ludwig Prandtl 1875–1953Stromungsmechanik, Grenz-schichttheorieRichard Edler von Mises 1883–1953Stromungsmechankik, Aerodyna-mik, Festigkeitshypotesen (vonMises-Spannung)
1886 Erfindung von Coca ColaEkkehart Kroner 1919–2000Plastizitatstheorie, Eigenspan-nungenClifford Truesdell 1919–2000Rational Mechanics
Die Beschreibung im Rahmen der Kontinuumsmechanik erfolgt makroskopisch, d. h. deratomistische Aufbau der Materie wird nicht untersucht. Vielmehr geht man davon aus, dassauf der zugrundeliegenden Skala die Materie als kontinuierlich im Raum verteilt angesehenwerden kann. Die Grundlage der Modellierung bilden dabei einige wenige Axiome, die apriori als wahr angenommen und im Rahmen der Theorie nicht bewiesen werden konnen.
Sowohl die Axiome als auch die erganzenden Aussagen uber das Verhalten ganz spezi-eller Korper, die betrachtet werden, werden aus Experimenten abgeleitet. Die Kontinu-umsmechanik wird daher auch als phanomenologisch bezeichnet, da sie die Ursachen derBeobachtung, die ublicherweise auf einer kleineren als der betrachteten Skala liegen, nichtuntersucht. So ist z. B. die Ursache fr die Steifigkeit eines Festkorpers, die an einer ma-kroskopischen Probe im Zugversuch gemessen werden kann, auf der atomaren Skala durchdie Krafte verursacht, mit denen die atomaren Bindungen bei der Dehnung des Korpersbelastet werden.
Da die Strukturen, die in Ingenieurfragestellungen untersucht werden, im Vergleich zuAtomen oder Molekulen sehr groß sind, ist eine Beschreibung auf der atomaren Skala nichtzielfuhrend, da selbst auf modernen Supercomputern die entsprechenden Rechnungen nichtdurchfuhrbar oder zu langwierig sind. Eine Beschreibung auf einer geeignet großen Skala istdaher fur das ingenieurmaßige Verstandnis der Deformation und eines moglichen Versagenszwingent notwendig.
Ein Vorteil der Kontinuumsmechanik, der durch die Annahme der kontinuierlich verteil-ten Korper bedingt ist, ist in der Anwendung der Differentialgeometrie und der Differen-tialrechnung zu sehen. Dadurch, dass bei der Beschreibung alle Großen als hinreichendstetig angesehen werden konnen, fuhrt die mathematische Modellierung auf Systeme vonpartiellen Differentialgleichungen im Ort und in der Zeit, die mit effizienten numerischen
4 Kontinuumsmechanik WS 16/17
Verfahren, wie etwa der Methode der Finiten Elemente, auch im nichtlinearen Fall gelostwerden konnen.
Aufgrund der phanomenologischen Beschreibung ergeben sich drei Bereiche, die untersuchtwerden mussen:
• Experimente
Experimente bilden die Grundlage der Beschreibung. Effekte, die in den Experimen-ten immer wieder beobachtet werden, bekommen den Charakter von Axiomen. Mangeht davon aus, dass diese Effekte immer auftreten und von grundsatzlicher Na-tur sind. Haufig spricht man von Naturgesetzen. Das wohl bekannteste Axiom istdas 2. Newtonsche Axiom in der Form Kraft ist Masse mal Beschleunigung , dasals Definition der Kraft aufgefasst werden kann. Experimente, die sich mit spezi-ellen Effekten, z.B. mit der Bestimmung von Steifigkeiten oder Fließgrenzen einesFestkorpers befassen, werden genutzt, um die sogenannten Materialgleichungen oderKonstitutivgleichungen des betrachteten Korpers zu ermitteln.
• Theorie
Die theoretische Beschreibung basiert einerseits auf den Axiomen, die nicht in Fragegestellt werden, wenn sie einmal etabliert sind. Hierzu zahlen die Massen-, Impuls-und Drallbilanz sowie der erste und zweite Hauptsatz der Thermodynamik. DieserBlock von Gleichungen wird allgemein als Bilanzgleichungen bezeichnet. Anderseitsbeinhaltet die Theorie eine Beschreibung der Kinematik, in der Begriffe wie Ver-schiebung, Geschwindigkeit und Beschleunigung aber auch Deformation behandeltwerden. Dieser Teil der Theorie beruht im wesentlichen auf differentialgeometrischenBetrachtungen.
Der dritte Teil der Theorie wird schließlich durch die Konstitutivgleichungen gebil-det. Sie beschreiben das individuelle Verhalten der Korpers, der untersucht wird. Andieser Stellt findet die phanomenologische Verknupfung von Experiment und Theo-rie statt. Ublicherweise werden die Experimente so angelegt, dass sich homogeneDeformations- und Spannungszustande ergeben. Dann konnen aus den gemessenenWeg- und Kraftwerten die entsprechenden lokalen Großen leicht ermittelt werden.Aus diesen Daten wird dann ein Spannungs-Dehnungszusammenhang konstruiert,der das Materialverhalten lokal beschreibt.
• Numerik
Die Kombination der Bilanzgleichungen mit der Kinematik und den Konstitutivglei-chungen fuhrt in der Regel auf einen nichtlinearen Satz von partiellen Differential-gleichungen, die nur in Ausnahmefallen analytische gelost werden konnen. Durch diegestiegene Rechenleistung von Computern hat sich daher in den vergangenen Jahrendie numerische Mechanik oder die computerorientierte Mechanik etabliert. Hier wer-den Methoden der nuermische Mathematik auf die nichtlinearen Problemstellungen
α-Version vom 3.12.2016 5
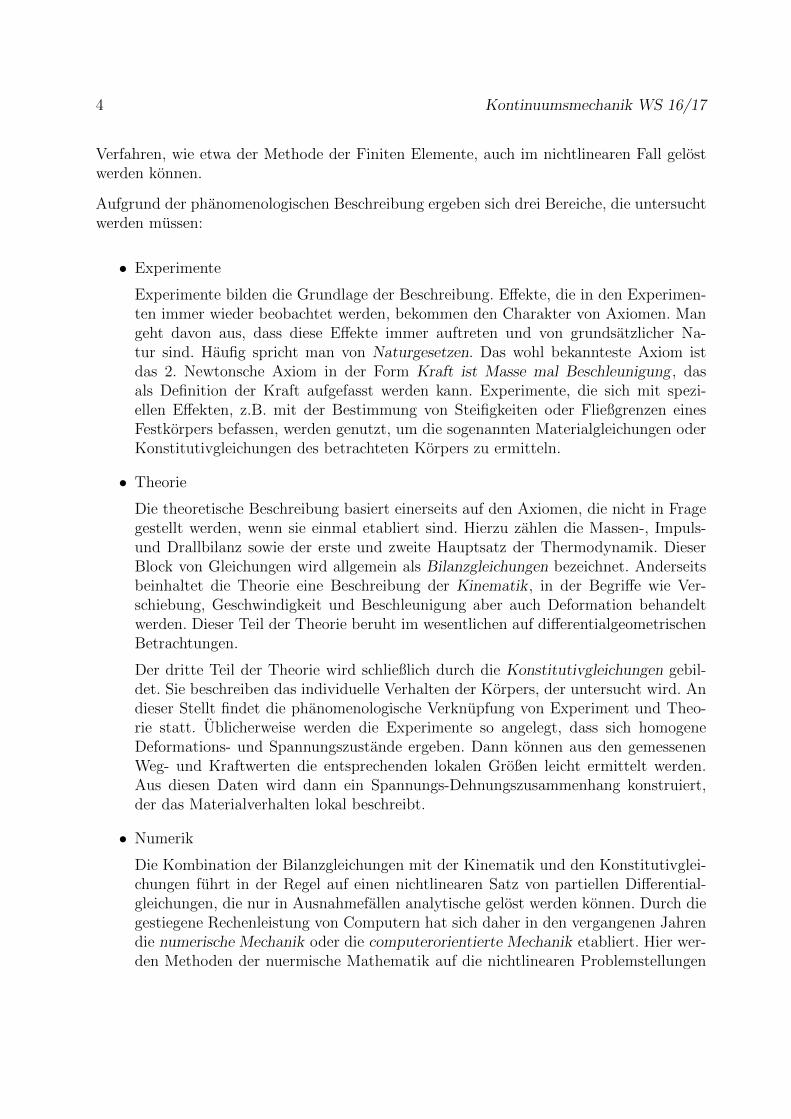
Abbildung 1: Reales Rohr und Simulation fig_einl_1
der Mechanik angewandt. Die wohl bekannteste Methode ist die Methode der Fini-ten Elemente, die mittlerweile auch in viele kommerzielle erhaltlichen Programmezur Berechnung mechanischer Fragestellungen Einzug gehalten hat.
In der vorliegenden Veranstaltung Kontinuumsmechanik werden die Grundlagen vermit-telt, die zur Formulierung und Behandlung kontinuumsmechanischer Fragestellungen erfor-derlich sind. Behandelt werden vor allem Probleme der Festkorpermechanik. Die Methodensind aber problemlos auf die Fluidmechanik ubertragbar.
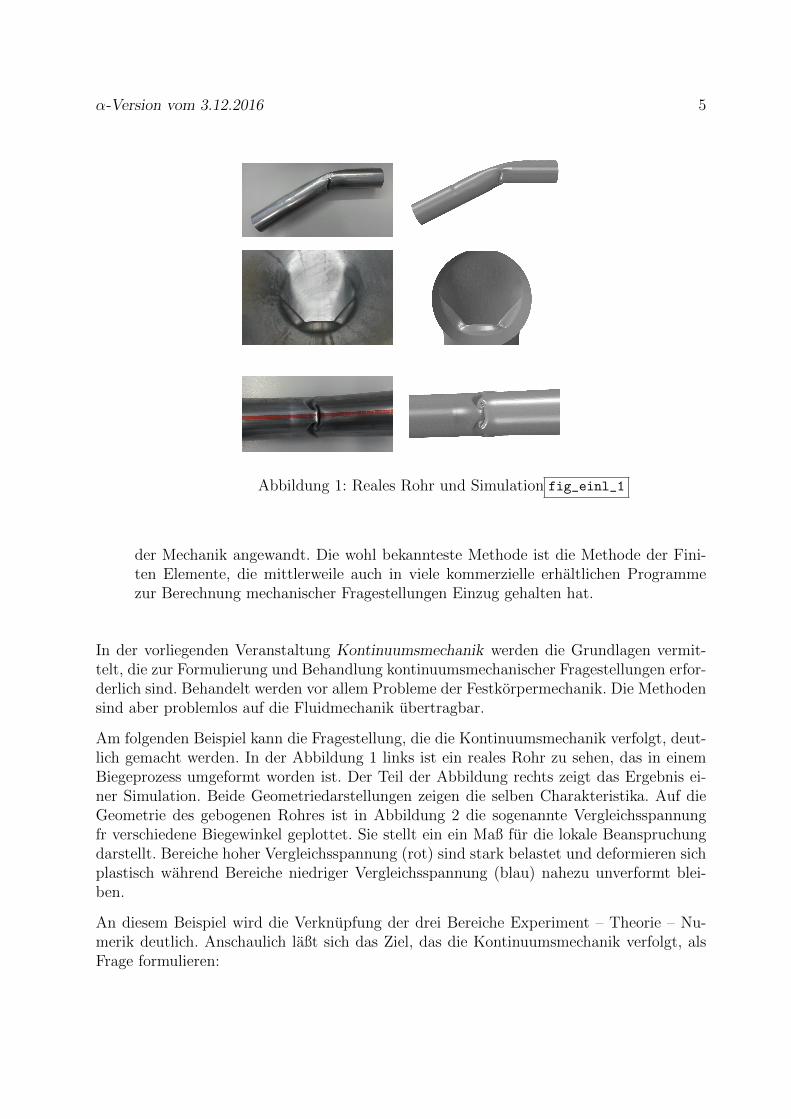
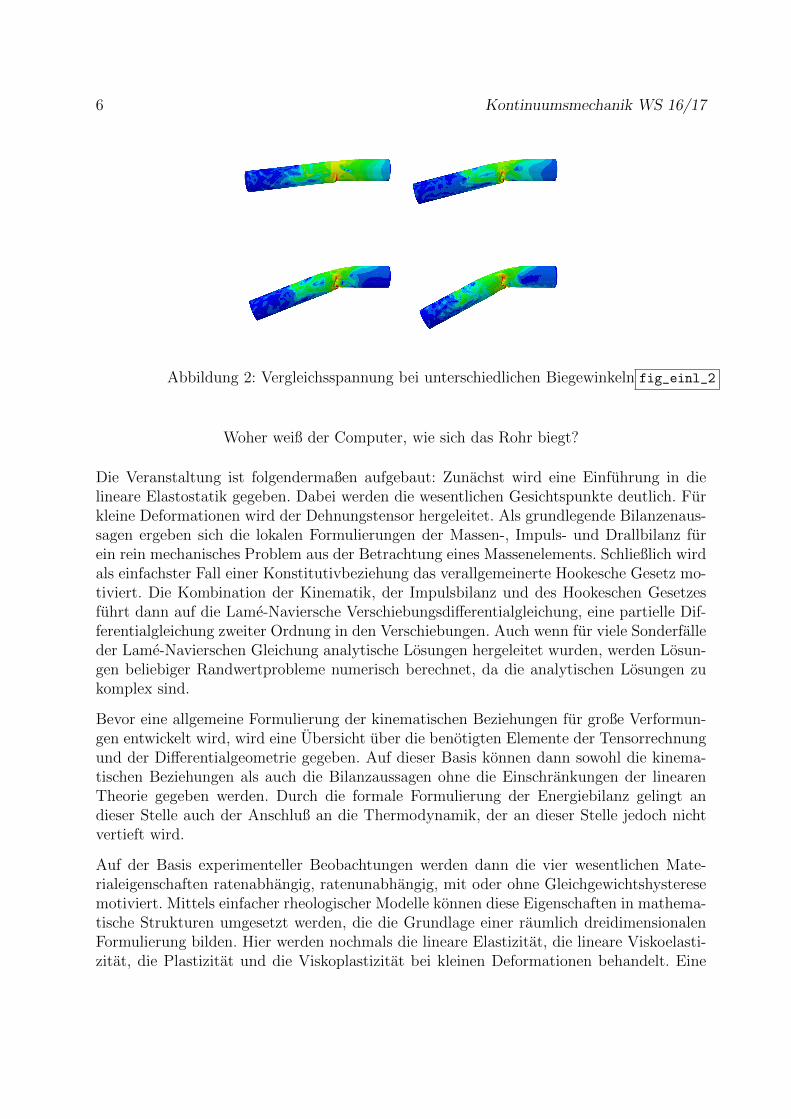
Am folgenden Beispiel kann die Fragestellung, die die Kontinuumsmechanik verfolgt, deut-lich gemacht werden. In der Abbildung 1 links ist ein reales Rohr zu sehen, das in einemBiegeprozess umgeformt worden ist. Der Teil der Abbildung rechts zeigt das Ergebnis ei-ner Simulation. Beide Geometriedarstellungen zeigen die selben Charakteristika. Auf dieGeometrie des gebogenen Rohres ist in Abbildung 2 die sogenannte Vergleichsspannungfr verschiedene Biegewinkel geplottet. Sie stellt ein ein Maß fur die lokale Beanspruchungdarstellt. Bereiche hoher Vergleichsspannung (rot) sind stark belastet und deformieren sichplastisch wahrend Bereiche niedriger Vergleichsspannung (blau) nahezu unverformt blei-ben.
An diesem Beispiel wird die Verknupfung der drei Bereiche Experiment – Theorie – Nu-merik deutlich. Anschaulich laßt sich das Ziel, das die Kontinuumsmechanik verfolgt, alsFrage formulieren:
6 Kontinuumsmechanik WS 16/17
Abbildung 2: Vergleichsspannung bei unterschiedlichen Biegewinkeln fig_einl_2
Woher weiß der Computer, wie sich das Rohr biegt?
Die Veranstaltung ist folgendermaßen aufgebaut: Zunachst wird eine Einfuhrung in dielineare Elastostatik gegeben. Dabei werden die wesentlichen Gesichtspunkte deutlich. Furkleine Deformationen wird der Dehnungstensor hergeleitet. Als grundlegende Bilanzenaus-sagen ergeben sich die lokalen Formulierungen der Massen-, Impuls- und Drallbilanz furein rein mechanisches Problem aus der Betrachtung eines Massenelements. Schließlich wirdals einfachster Fall einer Konstitutivbeziehung das verallgemeinerte Hookesche Gesetz mo-tiviert. Die Kombination der Kinematik, der Impulsbilanz und des Hookeschen Gesetzesfuhrt dann auf die Lame-Naviersche Verschiebungsdifferentialgleichung, eine partielle Dif-ferentialgleichung zweiter Ordnung in den Verschiebungen. Auch wenn fur viele Sonderfalleder Lame-Navierschen Gleichung analytische Losungen hergeleitet wurden, werden Losun-gen beliebiger Randwertprobleme numerisch berechnet, da die analytischen Losungen zukomplex sind.
Bevor eine allgemeine Formulierung der kinematischen Beziehungen fur große Verformun-gen entwickelt wird, wird eine Ubersicht uber die benotigten Elemente der Tensorrechnungund der Differentialgeometrie gegeben. Auf dieser Basis konnen dann sowohl die kinema-tischen Beziehungen als auch die Bilanzaussagen ohne die Einschrankungen der linearenTheorie gegeben werden. Durch die formale Formulierung der Energiebilanz gelingt andieser Stelle auch der Anschluß an die Thermodynamik, der an dieser Stelle jedoch nichtvertieft wird.
Auf der Basis experimenteller Beobachtungen werden dann die vier wesentlichen Mate-rialeigenschaften ratenabhangig, ratenunabhangig, mit oder ohne Gleichgewichtshysteresemotiviert. Mittels einfacher rheologischer Modelle konnen diese Eigenschaften in mathema-tische Strukturen umgesetzt werden, die die Grundlage einer raumlich dreidimensionalenFormulierung bilden. Hier werden nochmals die lineare Elastizitat, die lineare Viskoelasti-zitat, die Plastizitat und die Viskoplastizitat bei kleinen Deformationen behandelt. Eine
α-Version vom 3.12.2016 7
Erweiterung um die Berucksichtigung von Schadigungsphanomenen schließt die Betrach-tungen ab.
Die grundsatzliche Behandlung von nichtlinearen Modellen fur große Deformationen imRahmen der rationalen Kontinuumsthermodynamik findet in der Veranstaltung Materialm-odellierung statt und erweitert das hier aufgezeigte Vorgehen.

8 Kontinuumsmechanik WS 16/17
α-Version vom 3.12.2016 9
2 Lineare Elastizitatstheoriesec_linelast
In dem Fall, dass Strukturen mit kleinen Kraften belastet werden, beobachtet man haufiglinear elastisches Verhalten. Das außert sich darin, dass sich die Deformationen eines Bau-teils proportional zu seiner Belastung verhalten, d.h. die Durchbiegung eines Tragers ver-doppelt sich, wenn die Last verdoppelt wird. Bei Wegnahme der Last geht der Trager inseinen ursprunglichen Zustand zuruck. Diese vereinfachende Annahme gestattet die Aus-legung vieler technischer Systeme auf ihre Gebrauchstauglichkeit hin. Allerdings stoßt sieauch haufig an ihre Grenzen. Nichtlineare Effekte, wie etwa das Auftreten plastischer De-formationen, die auch nach einer Wegnahme der Last bleiben, oder ratenabhangige Ef-fekte, die vor allem bei Polymerwerkstoffen oder im Hochtemperaturbereich beobachtetwerden, konnen mit diesen einfachen Ansatzen nicht beschrieben werden. Dennoch zeigtdie Formulierung der linearen Elastizitatstheorie die wesentlichen Grundzuge auf, die sichin jedem kontinuumsmechanischen Modell finden. Daher werden in diesem Kapitel die ent-sprechenden Uberlegungen zusammengestellt. Sie dienen im Weiteren als Richtschnur furdas grundsatzliche Vorgehen.
2.1 Der materielle Korper
Ein Bauteil oder Strukturelement, das im Hinblick auf sein mechanisches Verhalten simu-liert werden soll, wird vereinfachend als materieller Korper bezeichnet. Die Bezeichnungimpliziert, dass einerseits der betrachtete Korper untrennbar mit der Materie verbunden ist,aus der er gebildet wird. Uber den Aggregatzustand des Korpers (fest, flussig, gasformig)sowie uber seine konkreten Eigenschaften (elastisch, viskos, plastisch) ist an dieser Stellekeine Aussage erforderlich. Andererseits zeigt der Begriff auch, das die konkrete Form desBauteils fur die weiteren theoretischen Uberlegungen unerheblich ist. Der materielle Korperkann immer als ein beliebiger Ausschnitt eines konkreten Bauteils aufgefasst werden. DieGrundlage dafur liefert das in der Mechanik immer wieder angewandte Schnittprinzip.
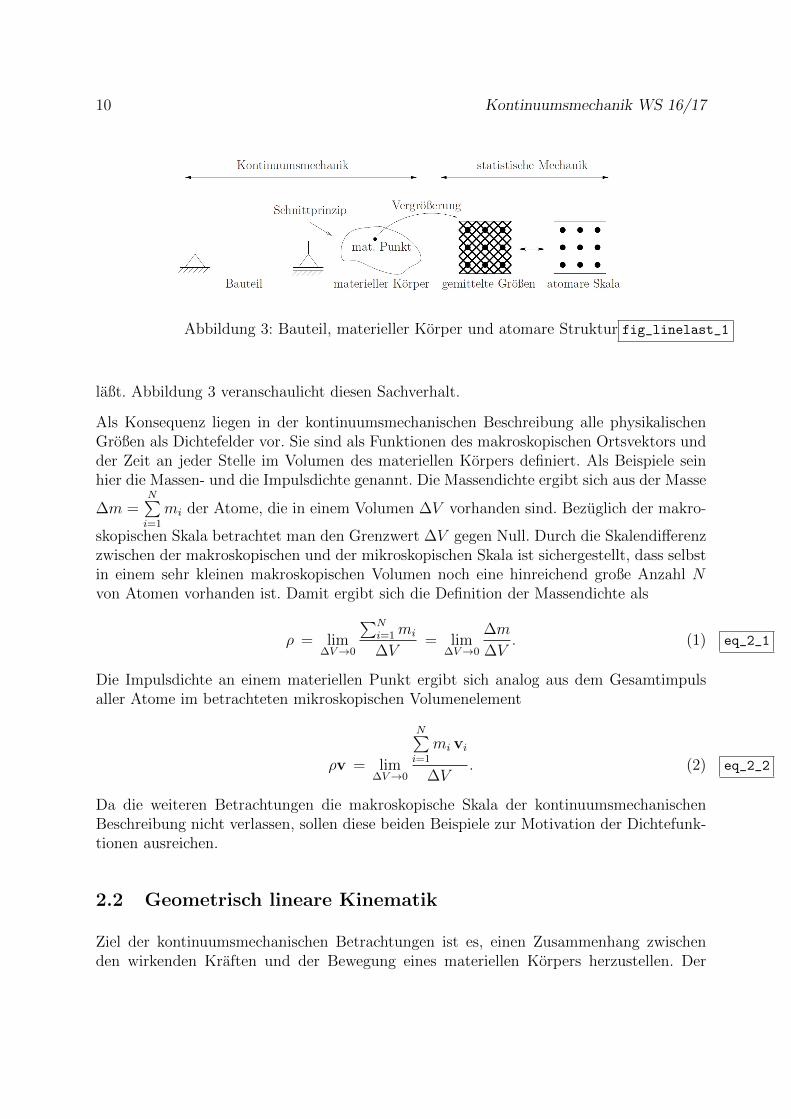
Da die Langenskala der kontinuumsmechanischen Betrachtung groß gegenuber den atoma-ren oder molekularen Dimensionen ist, geht man weiterhin davon aus, dass die Materieund damit die Masse kontinuierlich im Volumen des Korpers verteilt sind. Die kleinstebeschreibbare Einheit des materiellen Korpers ist der materielle Punkt. Der materiellePunkt ist der Trager der physikalischen Eigenschaften des materiellen Korpers und wirdim Rahmen der makroskopischen Beschreibung als mathematischer Punkt aufgefasst. Ineiner mikroskopischen Betrachtung, d.h. zum Beispiel im Rahmen einer atomistischen Mo-dellierung, ist der materielle Punkt ein Volumenelement, das mit einer endlichen Anzahlvon Atomen gefullt ist. Die statistische Mechanik befasst sich mit der Fragestellung, wieaus den Eigenschaften der einzelnen Atome durch geeignete Mittelungsoperationen die Ei-genschaften des materiellen Punktes bestimmt werden. Bezuglich der Makroskala ergebensich die Eigenschaften als Grenzwert, wenn man das betrachtete Volumen gegen Null gehen
10 Kontinuumsmechanik WS 16/17
Abbildung 3: Bauteil, materieller Korper und atomare Struktur fig_linelast_1
laßt. Abbildung 3 veranschaulicht diesen Sachverhalt.
Als Konsequenz liegen in der kontinuumsmechanischen Beschreibung alle physikalischenGroßen als Dichtefelder vor. Sie sind als Funktionen des makroskopischen Ortsvektors undder Zeit an jeder Stelle im Volumen des materiellen Korpers definiert. Als Beispiele seinhier die Massen- und die Impulsdichte genannt. Die Massendichte ergibt sich aus der Masse
∆m =N∑i=1
mi der Atome, die in einem Volumen ∆V vorhanden sind. Bezuglich der makro-
skopischen Skala betrachtet man den Grenzwert ∆V gegen Null. Durch die Skalendifferenzzwischen der makroskopischen und der mikroskopischen Skala ist sichergestellt, dass selbstin einem sehr kleinen makroskopischen Volumen noch eine hinreichend große Anzahl Nvon Atomen vorhanden ist. Damit ergibt sich die Definition der Massendichte als
ρ = lim∆V→0
∑Ni=1mi
∆V= lim
∆V→0
∆m
∆V. (1) eq_2_1
Die Impulsdichte an einem materiellen Punkt ergibt sich analog aus dem Gesamtimpulsaller Atome im betrachteten mikroskopischen Volumenelement
ρv = lim∆V→0
N∑i=1
mi vi
∆V. (2) eq_2_2
Da die weiteren Betrachtungen die makroskopische Skala der kontinuumsmechanischenBeschreibung nicht verlassen, sollen diese beiden Beispiele zur Motivation der Dichtefunk-tionen ausreichen.
2.2 Geometrisch lineare Kinematik
Ziel der kontinuumsmechanischen Betrachtungen ist es, einen Zusammenhang zwischenden wirkenden Kraften und der Bewegung eines materiellen Korpers herzustellen. Der
α-Version vom 3.12.2016 11
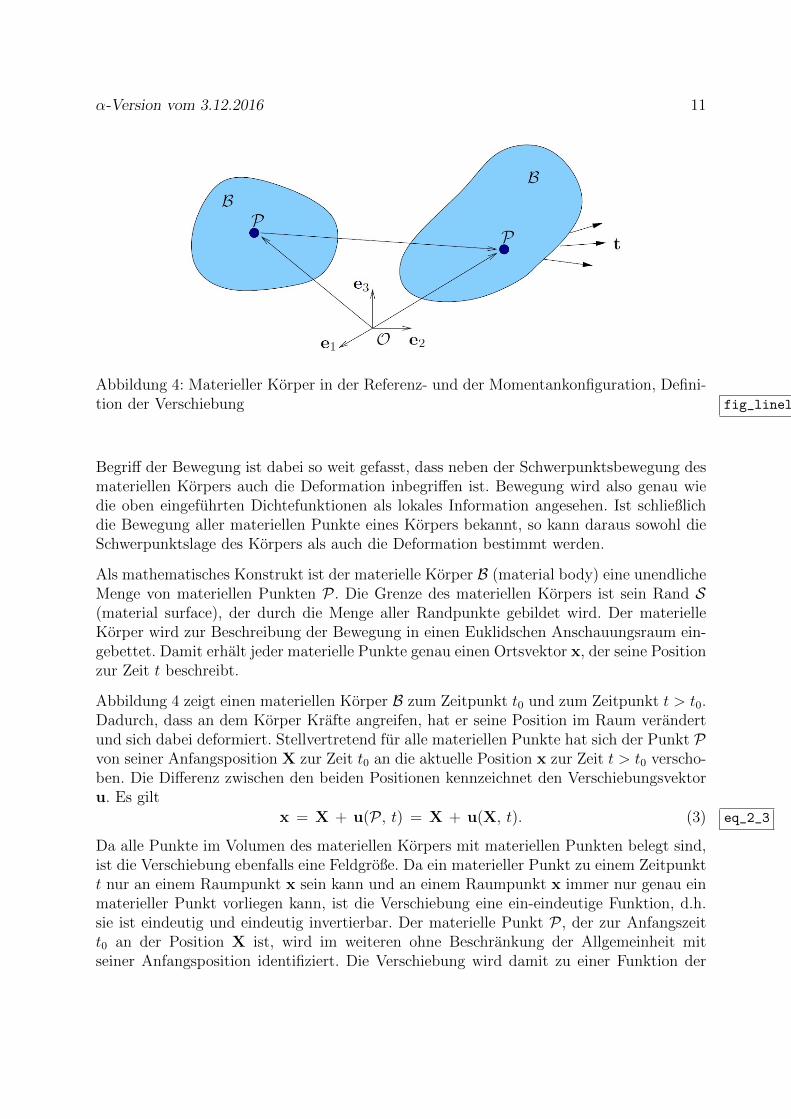
Abbildung 4: Materieller Korper in der Referenz- und der Momentankonfiguration, Defini-tion der Verschiebung fig_linelast_2
Begriff der Bewegung ist dabei so weit gefasst, dass neben der Schwerpunktsbewegung desmateriellen Korpers auch die Deformation inbegriffen ist. Bewegung wird also genau wiedie oben eingefuhrten Dichtefunktionen als lokales Information angesehen. Ist schließlichdie Bewegung aller materiellen Punkte eines Korpers bekannt, so kann daraus sowohl dieSchwerpunktslage des Korpers als auch die Deformation bestimmt werden.
Als mathematisches Konstrukt ist der materielle Korper B (material body) eine unendlicheMenge von materiellen Punkten P . Die Grenze des materiellen Korpers ist sein Rand S(material surface), der durch die Menge aller Randpunkte gebildet wird. Der materielleKorper wird zur Beschreibung der Bewegung in einen Euklidschen Anschauungsraum ein-gebettet. Damit erhalt jeder materielle Punkte genau einen Ortsvektor x, der seine Positionzur Zeit t beschreibt.
Abbildung 4 zeigt einen materiellen Korper B zum Zeitpunkt t0 und zum Zeitpunkt t > t0.Dadurch, dass an dem Korper Krafte angreifen, hat er seine Position im Raum verandertund sich dabei deformiert. Stellvertretend fur alle materiellen Punkte hat sich der Punkt Pvon seiner Anfangsposition X zur Zeit t0 an die aktuelle Position x zur Zeit t > t0 verscho-ben. Die Differenz zwischen den beiden Positionen kennzeichnet den Verschiebungsvektoru. Es gilt
x = X + u(P , t) = X + u(X, t). (3) eq_2_3
Da alle Punkte im Volumen des materiellen Korpers mit materiellen Punkten belegt sind,ist die Verschiebung ebenfalls eine Feldgroße. Da ein materieller Punkt zu einem Zeitpunktt nur an einem Raumpunkt x sein kann und an einem Raumpunkt x immer nur genau einmaterieller Punkt vorliegen kann, ist die Verschiebung eine ein-eindeutige Funktion, d.h.sie ist eindeutig und eindeutig invertierbar. Der materielle Punkt P , der zur Anfangszeitt0 an der Position X ist, wird im weiteren ohne Beschrankung der Allgemeinheit mitseiner Anfangsposition identifiziert. Die Verschiebung wird damit zu einer Funktion der

12 Kontinuumsmechanik WS 16/17
Anfangsposition X und der Zeit t. Da die Anfangsposition X und der materielle Punkt Pin dieser Darstellung synonym gebracht werden, bezeichnet man die Darstellung 3 auch alsdie materielle Darstellung des Verschiebungsfeldes. In dieser Darstellung beweget sich derBeobachter des physikalischen Prozesses mit dem materiellen Punkt mit, d.h. er sieht zumaktuellen Zeitpunkt t den materiellen Punkt an der Position x(P , t) = X + u(X, t).
Wie in der Punktmechanik konnen aus der Verschiebung die Geschwindigkeit und dieBeschleunigung des materiellen Punktes P bestimmt werden. Die Positionsanderung proZeit liefert die Geschwindigkeit
v(X, t) = lim∆t→0
u(X, t+ ∆t) − u(X, t)
∆t=
du(X, t)
dt= u(X, t). (4) eq_2_4
Da sich der Beobachter mit dem materiellen Punkt bewegt, ist der Ortsvektor des mate-riellen Punktes X in der Anfangs- oder Referenzkonfiguration konstant. Die Zeitableitungin 4 ist daher eine totale Ableitung, fur die im weiteren ein Punkt als Sybmol verwendetwird.
Die Anderung der Geschwindigkeit liefert die Beschleunigung
a(X, t) = lim∆t→0
v(X, t+ ∆t) − V(X, t)
∆t= v(X, t) = u(X, t). (5) eq_2_5
Sofern aus Grunden der Eindeutigkeit nicht erforderlich, wird auf die Angabe der Argu-mente X und t im weiteren verzichtet.
Aus dem Verschiebungszustand kann die Deformation eines materiellen Korpers nicht di-rekt abgelesen werden. Dazu ist es vielmehr erforderlich, ein materielles Volumenelement zubetrachten, das sich mit dem Korper bewegt und deformiert. Ein entsprechendes Elementin ist in Abbildung 5 dargestellt. Der Einfachheit halber ist eine ebene Situation gezeigt. Inder Referenkonfiguration wird das Volumenelement als Rechteck der Kantenlangen ∆X1
und ∆X2 gewahlt. Da das Element als klein angenommen wird, deformieren sich seineKanten linear. Das Rechteck wird in der aktuellen Konfiguration eine Raute (im dreidi-mensionalen Fall ein Spat), deren proijezierte Kanten die Langen ∆X1 und ∆X2 besitzen.
Die Ecken werden durch die materiellen Punkte P , Q und R gebildet. Der Punkt P ver-schiebt sich bei der Deformation um u(X). Da die Abstande ∆X1 und ∆X2 klein sind,konnen die Verschiebungen der Punkte Q und R durch Taylor-Reihen approximiert wer-den. Dann gilt
u(Q) = u(X + ∆X2e2) = u(X) +∂u
∂X2
∆X2,
u(R) = u(X + ∆X2e2) = u(X) +∂u
∂X1
∆X1.(6) eq_2_6
Identifiziert man die Kantenlangen ∆X1 und ∆X2 mit den Ausgangslangen l1 und l2,so erfahren die Projektionen des deformierten Elements auf die x1- bzw. x2-Achse dieLangenanderungen ∆l1 und ∆l2. Damit gilt ∆x1 = l1 + ∆l1 und ∆x2 = l2 + ∆l2. Die
α-Version vom 3.12.2016 13
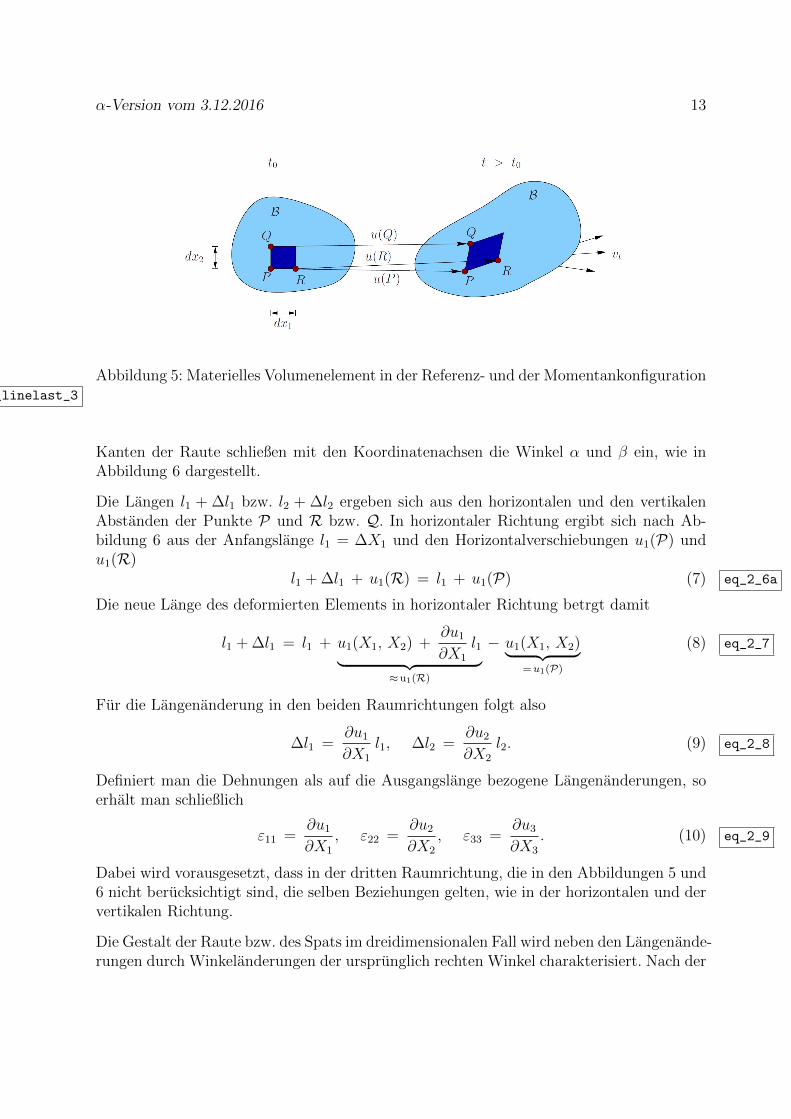
Abbildung 5: Materielles Volumenelement in der Referenz- und der Momentankonfigurationfig_linelast_3
Kanten der Raute schließen mit den Koordinatenachsen die Winkel α und β ein, wie inAbbildung 6 dargestellt.
Die Langen l1 + ∆l1 bzw. l2 + ∆l2 ergeben sich aus den horizontalen und den vertikalenAbstanden der Punkte P und R bzw. Q. In horizontaler Richtung ergibt sich nach Ab-bildung 6 aus der Anfangslange l1 = ∆X1 und den Horizontalverschiebungen u1(P) undu1(R)
l1 + ∆l1 + u1(R) = l1 + u1(P) (7) eq_2_6a
Die neue Lange des deformierten Elements in horizontaler Richtung betrgt damit
l1 + ∆l1 = l1 + u1(X1, X2) +∂u1
∂X1
l1︸ ︷︷ ︸≈u1(R)
− u1(X1, X2)︸ ︷︷ ︸=u1(P)
(8) eq_2_7
Fur die Langenanderung in den beiden Raumrichtungen folgt also
∆l1 =∂u1
∂X1
l1, ∆l2 =∂u2
∂X2
l2. (9) eq_2_8
Definiert man die Dehnungen als auf die Ausgangslange bezogene Langenanderungen, soerhalt man schließlich
ε11 =∂u1
∂X1
, ε22 =∂u2
∂X2
, ε33 =∂u3
∂X3
. (10) eq_2_9
Dabei wird vorausgesetzt, dass in der dritten Raumrichtung, die in den Abbildungen 5 und6 nicht berucksichtigt sind, die selben Beziehungen gelten, wie in der horizontalen und dervertikalen Richtung.
Die Gestalt der Raute bzw. des Spats im dreidimensionalen Fall wird neben den Langenande-rungen durch Winkelanderungen der ursprunglich rechten Winkel charakterisiert. Nach der

14 Kontinuumsmechanik WS 16/17
Abbildung 6: Deformiertes Volumenelement fig_linelast_4
Abbildung 6 ergeben sich der Tangens des Winkels α aus dem rechtwinklingen Dreieck,das durch die beiden Hypothenusen l1 + u1(R)− u1(P und u2(R)− u2(P) gebildet wird,
tanα =u2(R) − u2(P)
l1 + ∆l1. (11) eq_2_10
Dieser Ausdruck ist nichtlinear. Fur kleine Verschiebungen und kleine Verschiebungsablei-tungen sind die Winkel jedoch klein und die nichtlinearen Beziehungen konnen linearisiertwerden. Betrachtet man dazu wieder die entsprechenden Taylor-Reihen unter Vernachlassi-ung der quadratischen und hoheren Terme, so erhalt man fur die Winkel α und β diefolgende Beziehung
α =∂u2
∂X1
, β =∂u1
∂X2
. (12) eq_2_11
Die mittlere Winkelanderung, die der rechte Winkel des Volumenelements in der gezeigtenEbene x1–x2-Ebene erfahrt ist somit
ε12 =1
2
(∂u1
∂X2
+∂u2
∂X1
). (13) eq_2_12
Analoge Uberlegungen in der x2–x3- und der x3–x1-Ebene fuhren auf
ε23 =1
2
(∂u2
∂X3
+∂u3
∂X2
), ε31 =
1
2
(∂u3
∂X1
+∂u1
∂X3
). (14) eq_2_13
Die gesamten Winkelanderungen werden als Gleitungen, die mittleren Winkelanderungen13 und 14 werden als Schubverzerrungen bezeichnet.

α-Version vom 3.12.2016 15
Die Deformation eines ursprunglich quaderformigen Volumenelements in einen Parallelepi-ped oder Spat kann im Fall kleiner Deformationen also durch die relativen Langenande-rungen und die mittleren Winkelanderungen erfasst werden. Diese Verzerrungsgroßen kannman in einem Matrizenschema anordnen
εεε =
∂u1
∂X1
1
2
(∂u1
∂X2
+∂u2
∂X1
)1
2
(∂u1
∂X3
+∂u3
∂X1
)1
2
(∂u2
∂X1
+∂u1
∂X2
)∂u2
∂X2
1
2
(∂u2
∂X3
+∂u3
∂X2
)1
2
(∂u1
∂X3
+∂u3
∂X1
)1
2
(∂u2
∂X3
+∂u3
∂X2
)∂u3
∂X3
. (15) eq_2_14
Da das kartesische Koordinatensystem, auf das sich die Darstellung 15 bezieht, willkurlichgewahlt ist, die Verzerrungen aber als physikalische Großen vom Koordinatensystem un-abhangig sind, gehort zu der Matrixdarstellung die entsprechende Basisinformation. Da-durch wird bei einer Transformation von einem in ein anderes Koordinatensystem ein be-stimmtes Transformationsverhalten festgelegt. Die Kombination der Koeffizienten 15 mitder zugehorigen Basisinformation definiert dann einen Tensor, den sogenannten Verzer-rungstensor. Das nachste Kapitel gibt dazu weitere Informationen.
Die Koeffizienten des Verzerrungstensors berechnen sich alle aus Ableitungen des Ver-schiebungsvektors nach den Koeffizienten des Ortsvektors. Zusammenfassend konnen dieKoeffizienten als
εij =1
2
(∂ui∂Xj
+∂uj∂Xi
)(16) eq_2_15
Die Indices i und j sind dabei Zahler, die die Werte von 1 bis 3 annehmen. In dem Ma-trizenschema gibt der erste Index die Zeile, der zweite die Spalte an, in der der jeweiligeKoeffizient eingetragen wird. Sind die Indices gleich, i = j, so ergeben sich die Diagonale-lemten. Fur ungleiche Indices i 6= j ergeben sich die jeweiligen Nebendiagonalelemente,wobei auf Grund der Konstruktion die Reihenfolge keine Rolle spielt. Der Verzerrungsten-sor ist symmetrisch.
Symbolisch kann der Verzerrungstensor durch die Verschiebungsgradienten dargestellt wer-den. Der Gradient entsteht, wenn man eine Feldgroße nach dem Ortsvektor ableitet. Furein Skalarfeld, z.B. das Temperaturfeld Θ(X), ergibt sich der Gradient als Vektor
Grad Θ =∂Θ(X)
∂X=
∂Θ
∂X1
∂Θ
∂X2
∂Θ
∂X3
. (17) eq_2_16
Der Spaltenvektor 172 bezieht sich auf die kartesische Basis, in der der Ortsvektor X dieKoeffizienten Xi, i = 1, 2, 3 besitzt, und besteht aus den partiellen Ableitungen des Feldes

16 Kontinuumsmechanik WS 16/17
Θ(X1, X2, X3) nach den drei Koeffizienten Xi. Fur ein Vektorfeld, z.B. fur das Verschie-bungsfeld u(X), konnen alle drei Koeffizienten des Vektors ui nach den drei KoeffizientenXj des Ortsvektors abgeleitet werden. Es ergeben sich daher neun Moglichkeiten, die wie-derum in einem Matrixschema angeordnet werden konnen,
Grad u =∂u
∂X=
∂u1
∂X1
∂u1
∂X2
∂u1
∂X3
∂u2
∂X1
∂u2
∂X2
∂u2
∂X3
∂u3
∂X1
∂u3
∂X2
∂u3
∂X3
. (18) eq_2_17
Bei der Transopsition eines Matrixschemas oder eines Tensors werden die Zeilen und Spal-ten vertauscht. Unter Ausnutzung der Transposition kann somit der Verzerrungstensor insymbolscher Notation als
εεε =1
2
(Grad u + (Grad u)T
)(19) eq_2_18
geschrieben werden. Die symbolische Notation ist von einer konkreten Wahl des Koordi-natensystems unabhangig. Mit der Wahl eines bestimmten Koordinatensystems wird dieDarstellung der Koeffizienten in dem zugehorigen Matrixschema festgelegt. Verwendet manz.B. Zylinder- oder Kugelkoordinaten anstelle von kartesischen Koordindaten andern sichdie Berechnungsvorschriften fur die Koeffizienten der Gradienten. Die Ursache liegt in demTransformationsverhalten der Tensoren, wenn man sie von einem in ein anderes Koordina-tensystem transformiert.
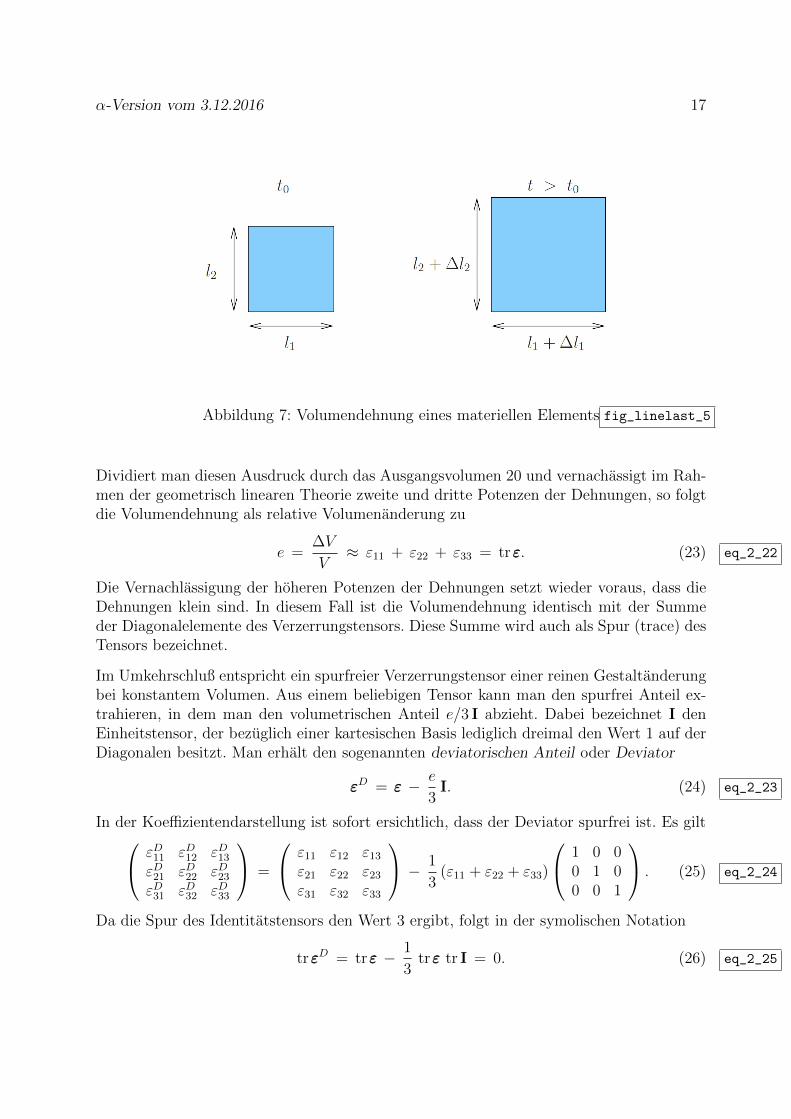
Neben den Langen- und Winkelanderungen, die direkt als Koeffizienten des Verzerrungs-tensors ablesbar sind, enthalt der Verzerrungstensor der geometrisch linearen Theorie auchnoch die Volumendehnung. Zur Herleitung betrachtet man wieder ein rechteckiges Volu-menelement in der Referenzkonfiguration. Wenn ein rein volumetrischer Deformationszu-stand aufgebracht wird, wird das Element großer, andert aber seine Winkel nicht. Fur denebenen Fall ist das in der Abbildung 7 dargestellt.
Das Ausgangsvolumen ergibt sich als Produkt der Langen li in den drei Koordinatenrich-tungen,
V = l1 l2 l3. (20) eq_2_19
In der Momentankonfiguration hat sich das Volumen um den Betrag ∆V verandert, dieGestalt des Elementes ist jedoch immer noch ein Quader. Es gilt
V + ∆V = (l1 + ∆l1)(l2 + ∆l2)(l3 + ∆l3). (21) eq_2_20
Mit der Definition der Langenanderungen 9 und der Dehnungen 10 ergibt sich schließlich
V + ∆V = (1 + ε11)(1 + ε22)(1 + ε33)l1 l2 l3. (22) eq_2_21
α-Version vom 3.12.2016 17
Abbildung 7: Volumendehnung eines materiellen Elements fig_linelast_5
Dividiert man diesen Ausdruck durch das Ausgangsvolumen 20 und vernachassigt im Rah-men der geometrisch linearen Theorie zweite und dritte Potenzen der Dehnungen, so folgtdie Volumendehnung als relative Volumenanderung zu
e =∆V
V≈ ε11 + ε22 + ε33 = trεεε. (23) eq_2_22
Die Vernachlassigung der hoheren Potenzen der Dehnungen setzt wieder voraus, dass dieDehnungen klein sind. In diesem Fall ist die Volumendehnung identisch mit der Summeder Diagonalelemente des Verzerrungstensors. Diese Summe wird auch als Spur (trace) desTensors bezeichnet.
Im Umkehrschluß entspricht ein spurfreier Verzerrungstensor einer reinen Gestaltanderungbei konstantem Volumen. Aus einem beliebigen Tensor kann man den spurfrei Anteil ex-trahieren, in dem man den volumetrischen Anteil e/3 I abzieht. Dabei bezeichnet I denEinheitstensor, der bezuglich einer kartesischen Basis lediglich dreimal den Wert 1 auf derDiagonalen besitzt. Man erhalt den sogenannten deviatorischen Anteil oder Deviator
εεεD = εεε − e
3I. (24) eq_2_23
In der Koeffizientendarstellung ist sofort ersichtlich, dass der Deviator spurfrei ist. Es gilt εD11 εD12 εD13
εD21 εD22 εD23
εD31 εD32 εD33
=
ε11 ε12 ε13
ε21 ε22 ε23
ε31 ε32 ε33
− 1
3(ε11 + ε22 + ε33)
1 0 00 1 00 0 1
. (25) eq_2_24
Da die Spur des Identitatstensors den Wert 3 ergibt, folgt in der symolischen Notation
trεεεD = trεεε − 1
3trεεε tr I = 0. (26) eq_2_25

18 Kontinuumsmechanik WS 16/17
Damit ist gezeigt, dass der Verzerrungsdeviator eine gestaltandernde Deformation bei kon-stantem Volumen beschreibt.
Die Verzerrungen 19 benotigt man, wenn es darum geht einen Zusammenhang zwischenden mechanischen Spannungen und der Deformation eines elastischen Bauteils herzulei-ten. Falls das Materialverhalten nicht elastisch sondern ratenabhangig ist, benotigt manferner die Verzerrungsgeschwindigkeit. Diese ergibt sich aus der zeitlichen Ableitung desVerzerrungstensors
εεε =d
dt
1
2
(Grad u + (Grad u)T
)=
1
2
(Grad v + (Grad v)T
). (27) eq_2_26
Da die Zeitableitung mit den Ortsableitungen des Gradientenoperators gemaß der Schwarz-schen Regel vertauschbar ist, kann die Verzerrungsgeschwindigkeit aus den Gradienten desGeschwindigkeitsfeldes v berechnet werden. Die Verzerrungsgeschwindigkeit ist wie dieVerzerrung selbst eine tensorielle Große. Die Koeffizienten auf der Diagonalen geben ab,mit welcher Geschwindigkeit sich die Lange der Kanten von Volumenelementen andern, dieNebendiagonalelemente entsprechen den Anderungsgeschwindigkeiten der Winkel.
2.3 Massen-, Impuls- und Drallbilanz
Wahrend die kinemastischen Uberlegungen des vorangegangenen Abschnitts eine Ver-knupfung zwischen der Verschiebung der materiellen Punkte und den Verzerrungen her-stellen, stellen die Bilanzgleichungen die mathematische Formulierung der physikalischenErhaltungsaussagen dar. In der klassischen Physik1 die Bilanzgleichungen axiomatisch ein-gefuhrt. Man beobachtet also immer wieder und in den unterschiedlichsten Situationen dieselben Sachverhalte und folgert, dass diese Beobachtungen universellen Charakter haben.Die aufgestellten Axiome bilden die Grundlage fur die folgenden theoretischen Betrachtun-gen. Sie konnen im Rahmen der Theorie nicht bewiesen werden, sondern sie sind vielmehrdas Fundament, auf dem die weiteren Betrachtungen aufbauen.
Fur die Kontinuumsmechanik spielen die Massen-, die Impuls- und die Drallbilanzen einewesentliche Rolle. Die entsprechenden Axiome lassen sich folgendermaßen formulieren:
• Massenbilanz
Die Masse eines materiellen Korpers ist wahrend seiner Bewegung konstant.
• Impulsbilanz
Der Impuls eines materiellen Korpers andert sich durch die Krafte, die an dem Korperangreifen (2. Newtonsches Axiom).
1Relativistische Effekte werden im Weiteren nicht betrachtet. Alle Prozesse finden im Rahmen derGultigkeit der klassischen Physik statt.
α-Version vom 3.12.2016 19
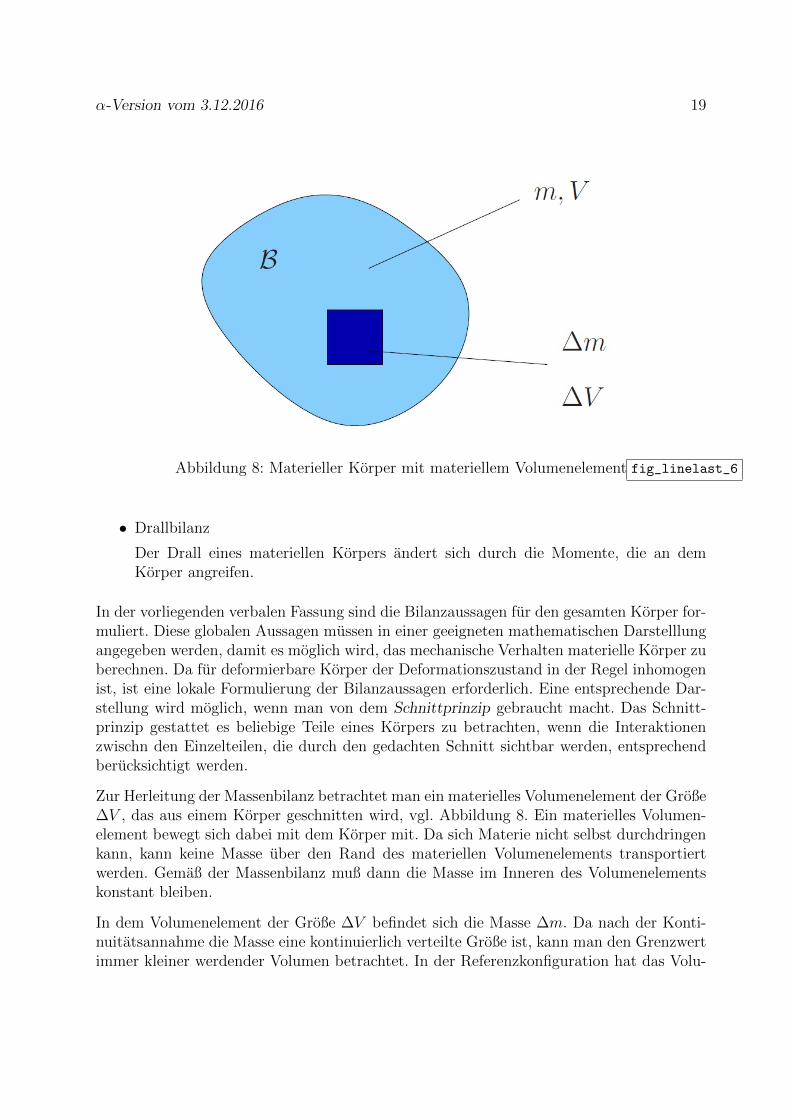
Abbildung 8: Materieller Korper mit materiellem Volumenelement fig_linelast_6
• Drallbilanz
Der Drall eines materiellen Korpers andert sich durch die Momente, die an demKorper angreifen.
In der vorliegenden verbalen Fassung sind die Bilanzaussagen fur den gesamten Korper for-muliert. Diese globalen Aussagen mussen in einer geeigneten mathematischen Darstelllungangegeben werden, damit es moglich wird, das mechanische Verhalten materielle Korper zuberechnen. Da fur deformierbare Korper der Deformationszustand in der Regel inhomogenist, ist eine lokale Formulierung der Bilanzaussagen erforderlich. Eine entsprechende Dar-stellung wird moglich, wenn man von dem Schnittprinzip gebraucht macht. Das Schnitt-prinzip gestattet es beliebige Teile eines Korpers zu betrachten, wenn die Interaktionenzwischn den Einzelteilen, die durch den gedachten Schnitt sichtbar werden, entsprechendberucksichtigt werden.
Zur Herleitung der Massenbilanz betrachtet man ein materielles Volumenelement der Große∆V , das aus einem Korper geschnitten wird, vgl. Abbildung 8. Ein materielles Volumen-element bewegt sich dabei mit dem Korper mit. Da sich Materie nicht selbst durchdringenkann, kann keine Masse uber den Rand des materiellen Volumenelements transportiertwerden. Gemaß der Massenbilanz muß dann die Masse im Inneren des Volumenelementskonstant bleiben.
In dem Volumenelement der Große ∆V befindet sich die Masse ∆m. Da nach der Konti-nuitatsannahme die Masse eine kontinuierlich verteilte Große ist, kann man den Grenzwertimmer kleiner werdender Volumen betrachtet. In der Referenzkonfiguration hat das Volu-

20 Kontinuumsmechanik WS 16/17
menelement die Große ∆V0, und es beinhaltet die Masse ∆m. In der Momentankonfigura-tion hat sich die Große des Volumens durch die Volumendehnung verandert. Der aktuelleWert betragt ∆V . Zwischen den Volumenelementen der Referenz- und der Momentankon-figuration besteht nach 24 der Zusammenhang
∆V0 (1 + e) = DeltaV (28) eq_2_27
Da das Volumenelement ein materielles Element ist, muss wahrend der Bewegung die Massein diesem Volumen konstant sein. Damit folgt
∆m
∆V0
= (1 + e)∆m
∆V(29) eq_2_28
Betrachtet man im nachsten Schritt den Grenzwert kleiner werdender Volumina, dannfolgt fur die Massendicht ρ0 in der Referenzkonfiguration und die Massendichte ρ in derMomentankonfiguration
ρ0 = lim∆V0→0
∆m
∆V0
= (1 + e) lim∆V→0
∆m
∆V= (1 + e) ρ, (30) eq_2_29
bzw.
ρ =1
1 + eρ0 ≈ (1− e) ρ0. (31) eq_2_30
Der zweite Teil von 31 gilt wiederum nur fur kleine Volumendehnungen, setzt also dieGultigkeit der geometrisch linearen Theorie voraus. Die Massenbilanz verknupft somitdie Massendichte ρ0 mit der aktuellen Massendichte ρ uber die Volumendehnung. Da dieBetrachtung fur den Grenzwert ∆V → 0 durchgefuhrt wurde, stellt 31 eine lokale Aussagedar, die an jedem Punkt im Inneren des materiellen Korpers Gultigkeit besitzt.
Das zweite Newtonsche Axiom oder die Impulsbilanz kann als Definition des Begriffs derKraft angesehen werden. Kraft ist demnach die Wirkung auf einen materiellen Korper, diezu einer Impulsanderung fuhrt. In einer globalen Formulierung kann der Schwerpunktsatzformuliert werden als
d
dt(mvS) = F. (32) eq_2_31
Dabei ist m die Masse, VS die Schwerpunktgeschwindigkeit und F die resultierende Kraft,vgl. Abbildung 9.
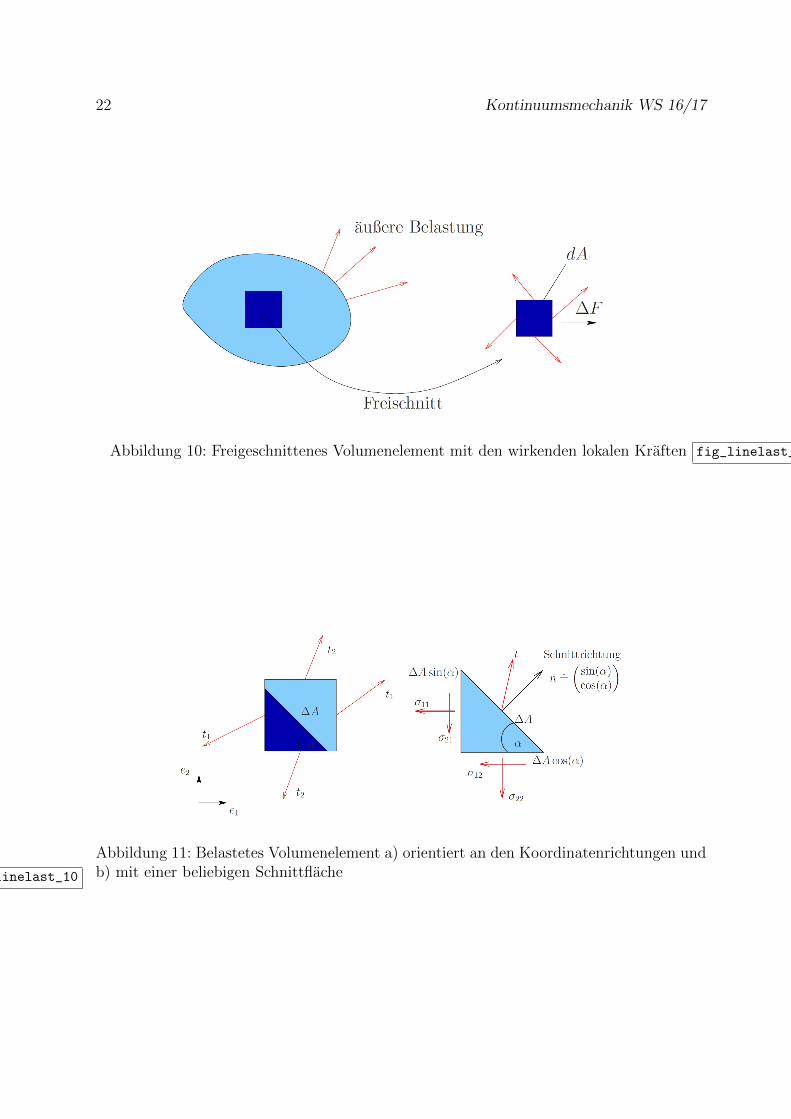
Diese Aussage 32 muss, genau wie die Massenbilanz, fur beliebige Teilkorper formuliertwerden. Dazu wird wieder ein materielles Volumenelement ∆V aus dem Koper geschnit-ten. Durch den Schnitt werden die lokalen Krafte auf den Oberflachen des Volumenele-ments sichtbar. Abbildung 10 zeigt auf einer Teilflache ∆A die lokale Schnittkraft ∆F. Dadurch die Kontinuitatsannahme garantiert ist, dass die Schnittkrafte gleichmassig auf denSchnittflachen verteilt sind, existiert der Grenzwert
t = lim∆A→0
∆F
∆A. (33) eq_2_32
α-Version vom 3.12.2016 21
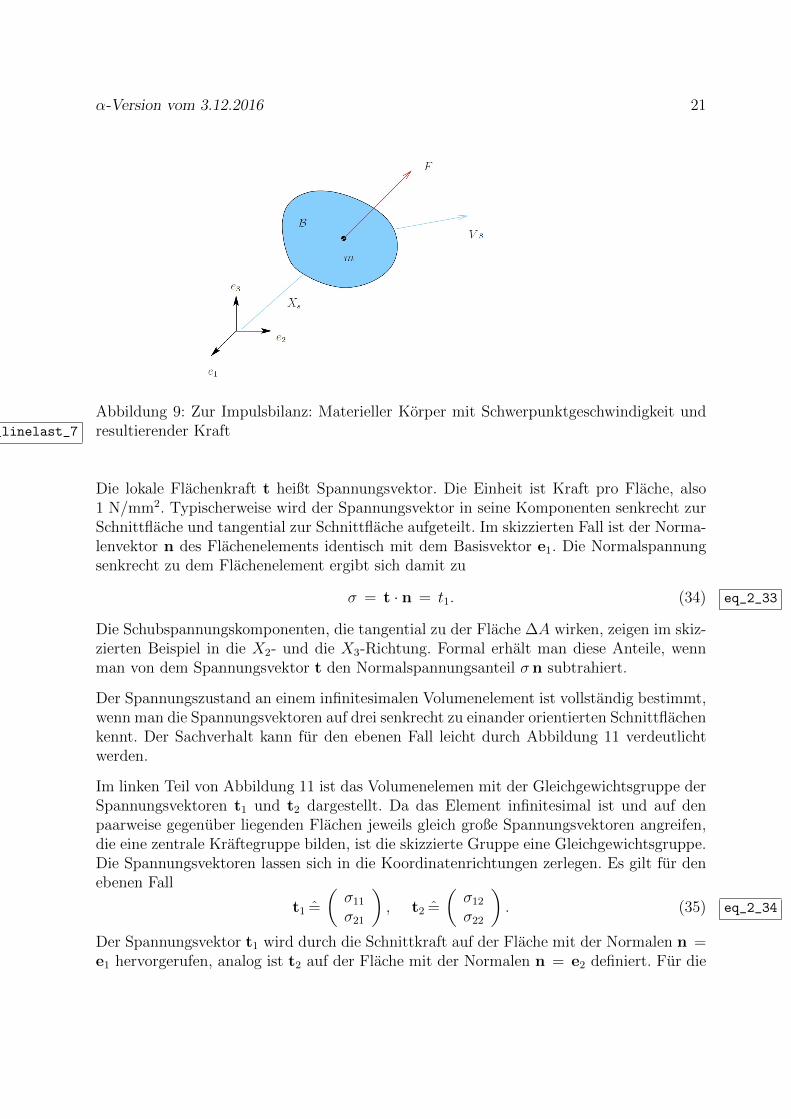
Abbildung 9: Zur Impulsbilanz: Materieller Korper mit Schwerpunktgeschwindigkeit undresultierender Kraftfig_linelast_7
Die lokale Flachenkraft t heißt Spannungsvektor. Die Einheit ist Kraft pro Flache, also1 N/mm2. Typischerweise wird der Spannungsvektor in seine Komponenten senkrecht zurSchnittflache und tangential zur Schnittflache aufgeteilt. Im skizzierten Fall ist der Norma-lenvektor n des Flachenelements identisch mit dem Basisvektor e1. Die Normalspannungsenkrecht zu dem Flachenelement ergibt sich damit zu
σ = t · n = t1. (34) eq_2_33
Die Schubspannungskomponenten, die tangential zu der Flache ∆A wirken, zeigen im skiz-zierten Beispiel in die X2- und die X3-Richtung. Formal erhalt man diese Anteile, wennman von dem Spannungsvektor t den Normalspannungsanteil σ n subtrahiert.
Der Spannungszustand an einem infinitesimalen Volumenelement ist vollstandig bestimmt,wenn man die Spannungsvektoren auf drei senkrecht zu einander orientierten Schnittflachenkennt. Der Sachverhalt kann fur den ebenen Fall leicht durch Abbildung 11 verdeutlichtwerden.
Im linken Teil von Abbildung 11 ist das Volumenelemen mit der Gleichgewichtsgruppe derSpannungsvektoren t1 und t2 dargestellt. Da das Element infinitesimal ist und auf denpaarweise gegenuber liegenden Flachen jeweils gleich große Spannungsvektoren angreifen,die eine zentrale Kraftegruppe bilden, ist die skizzierte Gruppe eine Gleichgewichtsgruppe.Die Spannungsvektoren lassen sich in die Koordinatenrichtungen zerlegen. Es gilt fur denebenen Fall
t1 =
(σ11
σ21
), t2 =
(σ12
σ22
). (35) eq_2_34
Der Spannungsvektor t1 wird durch die Schnittkraft auf der Flache mit der Normalen n =e1 hervorgerufen, analog ist t2 auf der Flache mit der Normalen n = e2 definiert. Fur die
22 Kontinuumsmechanik WS 16/17
Abbildung 10: Freigeschnittenes Volumenelement mit den wirkenden lokalen Kraften fig_linelast_9
Abbildung 11: Belastetes Volumenelement a) orientiert an den Koordinatenrichtungen undb) mit einer beliebigen Schnittflachefig_linelast_10
α-Version vom 3.12.2016 23
Bezeichnung der Koeffizienten in der Darstellung gibt damit der zweite Index die Richtungeq_2_34der Flachennormalen von der Flache an, auf der der Spannungsvektor definiert ist. Dererste Index gibt jeweils die Richtung an, in die der jeweilige Koeffizient zeigt. Konkret heißtdas: σij ist der Koeffizient eines Spannungsvektors, der auf der Flache mit der Normalenn = ej definiert ist und in Richtung ei zeigt. Auf der Flache mit der Normalen e1 ist daherdie Spannung σ11 eine Normalspannung wahrend die Spannung σ21 eine Schubspannungist. Auf der Flache mit der Normalen e2 verhalt es sich genau andersherum, σ12 ist dieSchubspannung und σ22 die Normalspannung. Folgt man der eingefuhrten Indizierung, soist eine Spannungskomponenten immer dann eine Normalspannung, wenn die Indices gleichsind, ansonsten eine Schubspannung.
Mit Bezug auf den rechten Teil der Abbildung 11 kann nun auch ein Spannungsvektort=(t1, t2) bestimmt werden, der auf einer beliebigen Flache mit der Normalen n defi-niert ist, die nicht mit einer der Koordinatenrichtungen zusammenfallt. Im vorliegendenFall ist die Flache unter dem Winkel α zur e1-Achse geneigt. Wenn die Schnittflache dieGroße ∆A, dann ergeben sich die proijezierten Flachen in die X1- und in die X2-Richtungzu ∆A cosα bzw. ∆A sinα. Die Normale der Schnittflache ∆A ist durch den Winkel αebenfalls bestimmt
n =
(n1
n2
)=
(sinαcosα
). (36) eq_2_35
Da die Spannungsvektoren t1 und t2 an dem ursprunglichen Volumenelement eine Gleich-gewichtsgruppe dargestellt haben, muß auch das abgeschnittene Dreieck, im dreidimensio-nalen Fall der abgeschnittene Tetraeder, im Gleichgewicht sein. Das Kraftegleichgewichtlaßt sich dann wie folgt angeben:
→: t1∆A,−σ11 ∆A sinα − σ12 ∆A cosα = 0,
↑: t2∆A,−σ21 ∆A sinα − σ22 ∆A cosα = 0.(37) eq_2_36
Klammert man das Flachenelement ∆A aus und identifiziert man die trigonometrischenFunktionen mit den Koeffizienten des Normalenvektors ??, so erhalt man
t1 = σ11 n1 + σ12 n2,
t2 = σ21 n1 + σ22 n2.(38) eq_2_37
Diese Ausdrucke lassen sich kompakt durch folgende Summenformel darstellen
ti =∑j
σij nj. (39) eq_2_38
Fuhrt man die skizzierte Uberlegung in drei Dimensionen durch, so gelangt man eben-falls wieder zu der Darstellung 39, wobei allerdings die Indices i und j von 1 bis 3, alsouber alle Koordinatenrichtungen, laufen. Ordnet man die Koeffizienten der drei gegebenen

24 Kontinuumsmechanik WS 16/17
Spannungsvektoren wiederum in einem Matrizenschema an
σ =
σ11 σ12 σ13
σ21 σ22 σ23
σ31 σ32 σ33
, (40) eq_2_39
so kann 39 als Matrix-Vektor-Produkt interpretiert werden t1t2t3
=
σ11 σ12 σ13
σ21 σ22 σ23
σ31 σ32 σ33
n1
n2
n3
. (41) eq_2_40
Die Koeffizienten des Spannungsvektors t auf der Schnittflache mit der Normalen n erge-ben sich dann aus den Produkten der Zeilen der Matrix σ mit dem Spalenvektor n. DieBeziehung 41 stellt das Cauchy-Theorem dar. Der Spannungszustand an einem materiellenPunkt ist demnach vollstandig charakterisiert, wenn die Spannungsvektoren auf drei je-weils senkrecht aufeinander stehenden Ebenen bekann sind. Die Komponenten dieser dreiSpannungsvektoren wenden im Spannungstensor gesammelt, d.h. neben der Matrix mitden Koeffizienten 40 ist noch die Richtungsinformation in Form der gewahlten Basis fureine eindeutige Darstellung notwendig. Genau wie beim Verzerrungstensor ist auch hierdas Transformationsverhalten bei einem Wechsel des Basissystems ausschlaggebend.
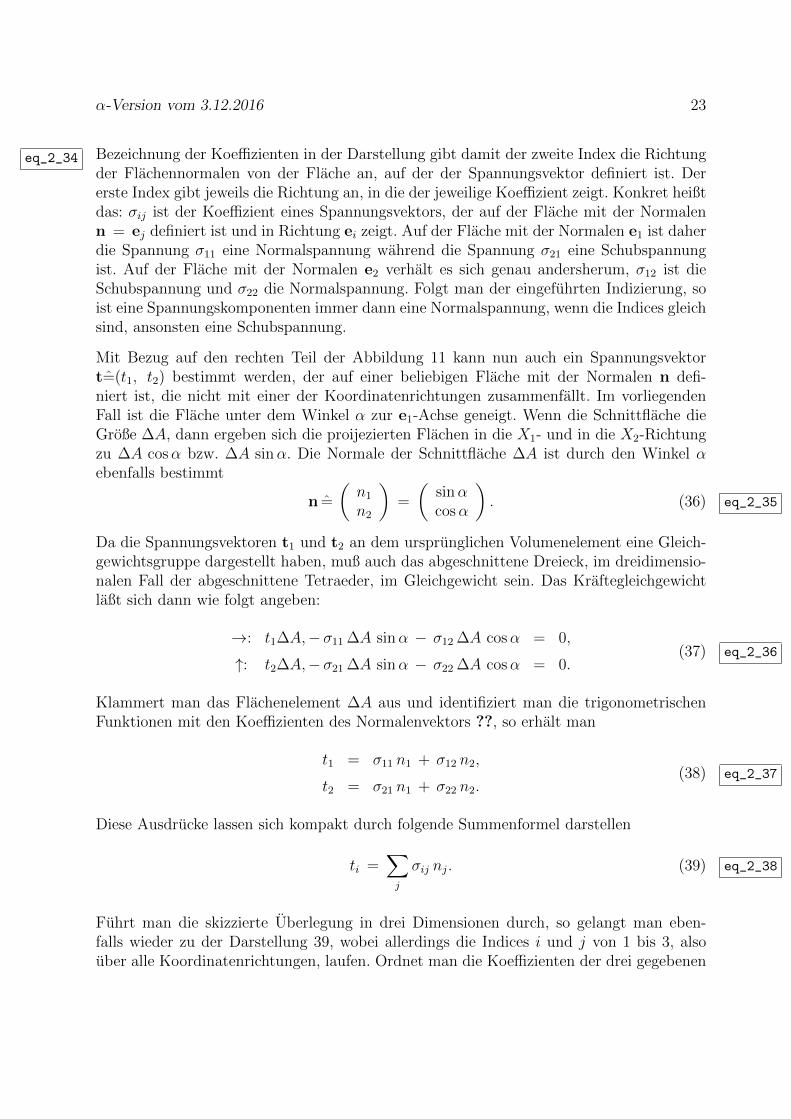
In der Abbildung 12 ist ein materielles Volumenelement gezeigt, das aus einem belastetenmateriellen Korper freigeschnitten wurde. Aus Grunden der Ubersichtlichkeit ist die Skizzewieder zweidimensional. Eine Erweiterung auf drei Dimensionen erfolgt analog. Das skiz-zierte Element ist entlang der Koordinatenachsen orientiert. Die Schnittkrafte konnen aufden Randern als konstant angenommen werden, da das Element als infinitesimal klein ange-nommen wird. Die entsprechenden Spannungsvektoren lassen sich dann direkt durch Koef-fizienten des Spannungstensors darstellen. Von der linken zur rechten bzw. von der unterenzur oberen Seite des Volumenelements konnen sich die wirkendn Spannungen verandern.Ursache dafur sind die Volumenkrafte b und die Impulsanerung des Elements.
Fur das skizzierte Element kann man nun die Impulsbilanz oder das zweite NewtonscheAxiom angeben. Mit der Masse ∆m des Elements gilt fur die Impulsanderung
∆m v = R. (42) eq_2_41
Die resultierende Kraft R besteht aus den resultierenden Volumenkraften b ∆X1 ∆X2 undden resultierenden Oberflachenkraften, die sich als Produkt der Spannungsvektoren mitden jeweiligen Seitenflachen des Elements ergeben. Bezuglich des kartesichen Koordina-tensystems folgt dann
∆m v1 = b1∆X1∆X2 + (σ11 + ∆σ11)∆X2 + (σ12 + ∆σ12)∆X1 − σ11∆X2 − σ12∆X1
∆m v2 = b2∆X1∆X2 + (σ21 + ∆σ21)∆X2 + (σ22 + ∆σ22)∆X1 − σ21∆X2 − σ22∆X1.(43) eq_2_42
α-Version vom 3.12.2016 25
Abbildung 12: Impulsbilanz am Volumenelement fig_linelast_8
Dabei kurzen sich die absoluten Spannungsanteile σ11, σ12, σ21 und σ22 aus den Gleichun-gen. Dividiert man beide Gleichungen noch durch das Volumen ∆V = ∆X1 ∆X2, so erhaltman schließlich folgende Beziehungen
∆m
∆Vv1 = b1 +
∆σ11
∆X1
+∆σ12
∆X2
,
∆m
∆Vv2 = b2 +
∆σ21
∆X1
+∆σ22
∆X2
.
(44) eq_2_43
Im letzten Schritt kann der Grenzwert ∆X1 → 0 und ∆X2 → 0 durchgefuhrt werden. Mitder Definition der Dichte ρ = lim
∆V→0∆m/∆V und der Definition der partiellen Ableitungen
∂(•)/∂Xi = lim∆Xi→0
(•)/∆Xi lautet die lokale Impulsbilanz fur den materiellen Punkt
ρ v1 = b1 +∂σ11
∂X1
+∂σ12
∂X2
,
ρ v2 = b2 +∂σ21
∂X1
+∂σ22
∂X2
.
(45) eq_2_44
Die beiden Gleichungen stellen die Komponenten der Impulsbilanz bezuglich der Koordi-natenrichtungen X1 und X2 dar. Fur die Richtung i = 1, 2 kann man kompakt schreiben
ρ vi = bi +∂σi1∂X1
+∂σi2∂X2
. (46) eq_2_45

26 Kontinuumsmechanik WS 16/17
Weiterhin kann man die Summe uber die Anderungen des Spannungszustands uber einenweiteren Summationsindex j darstellen
ρ vi = bi +2∑j=1
∂σij∂Xj
. (47) eq_2_45
Erweitert man das aufgezeigte Vorgehen auf drei Dimensionen, so entstehen Gleichungender Art47 fur die Richtungen i = 1, 2, 3. Die Summe uber die Spannungsterme lauft dannebenfalls uber die Indexwerte j = 1, 2, 3.
Der Vektor
divσ =3∑j=1
∂σij∂Xj
(48) eq_2_46
beinhaltet die partiellen Ableitungen des Spannungstensors. Im Gegensatz zum Gradien-ten wird hier jedoch ein Summenausdruck verwendet, der den Spannungstensor in einenVektor uberfuhrt. Dieser Vektor ist die Divergenz des zugehorigen Tensors. Genau wie derGradient stellt die Divegenz einen Differentialoperator dar. Ubersetzt man die Komponen-tengleichungen 47 in die absolute Darstellung, so entsteht folgende Form der Impulsbilanzfur den materiellen Punkt
ρ v = b + Divσ. (49) eq_2_47
Diese Aussage entspricht dem zweiten Newtonschen Gesetzt fur den Massepunkt bzw. demSchwerpunktsatz fur den starren Korper in der Form Kraft gleich Masse mal Beschleu-nigung . Die Masse wird dabei fur den materiellen Punkt durch die Massendichte ersetzt.Die Kraft entspricht der resultierenden Kraftdichte aus der Volumenkraftdichte b und derAnderung des Spannungszustands am materiellen Punkt.
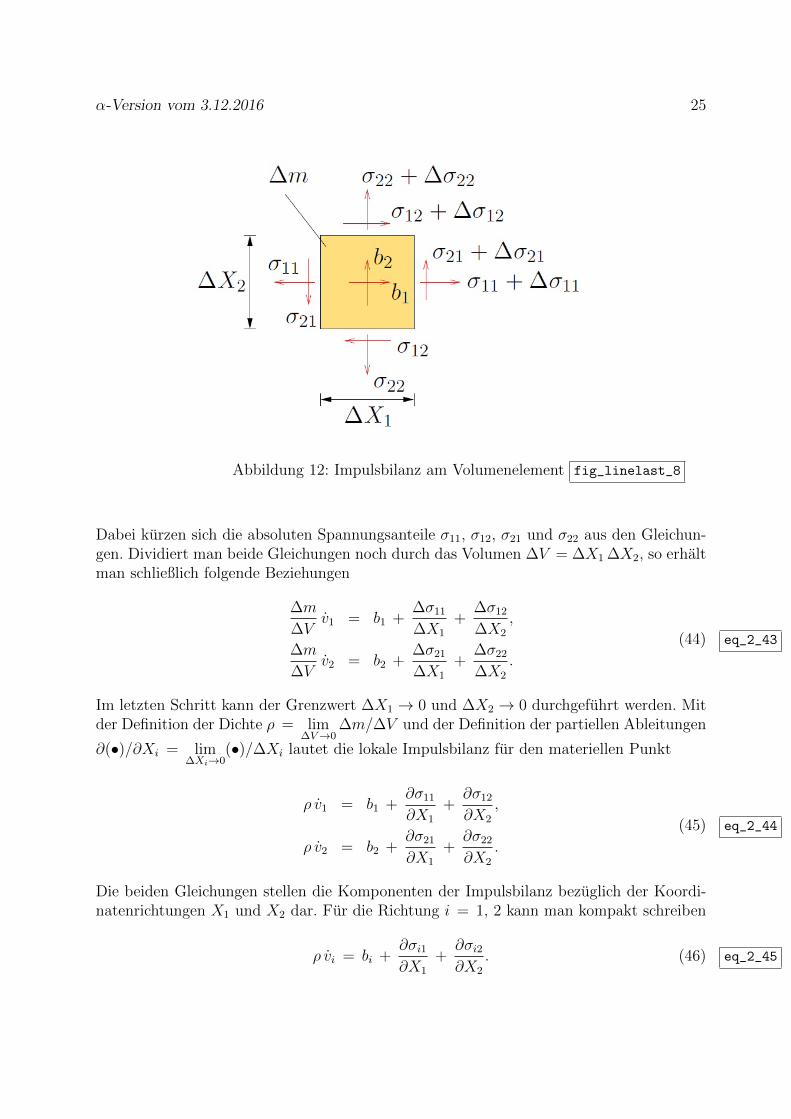
Die dritte Bilanz, die zur Formulierung eines rein mechanischen Problems benotigt wird,ist die Drallbilanz. Analog zur Impulsbilanz wird in de Drallbilanz die Drallanderung mitder Wirkung von Momenten verknupft. Da die Spannungen auf den Randern des Volu-menelements als konstant angesehen werden, uben die Normalspannungen σ11 und σ22
keine Moment bezuglich des Schwerpunktes S aus. Momente entstehen lediglich durch dieSchubspannungen σ12 und σ21. Die entsprechenden Hebelarme sind ∆X1 und ∆X2. DaSpannungsanderungen von der einen auf die andere Seite des Volumens klein sind und derGrenzfall eines infinitesimalen Volumens betrachtet wird, konnen die Momente der Span-nungsanderungen ∆σ12 und ∆σ21 vernachlassigt werdn. Sie sind von hohrer Ordnung klein,wenn der entsprechende Grenzwert ∆X1 → 0 und ∆X2 → 0 durchgefuhrt wird. Mit demTragheitsmoment Θ und der Winkelgeschwindigkeit ω bezuglich der Achse senkrecht zurZeichenebene von Abbildung 13 folgt dann
d(Θω)
dt= σ12∆X1 ∆X2 − σ21∆X2 ∆X1. (50) eq_2_48
Da das Tragheitsmoment mit der vierten Potenz der Abmessung des Volumens gebildetwird, ist im Grenzfall eines infinitesimalen Volumens dieser Ausdruck gegenuber Termen
α-Version vom 3.12.2016 27
Abbildung 13: Zur Drallbilanz am materiellen Volumenelement fig_linelast_11

28 Kontinuumsmechanik WS 16/17
auf der rechten Seite von 50 vernachlassigbar klein. Die Drallbilanz liefert somit fur eininfinitesimales Volumenelement die Symmetrie des Spannungstensors
σ12 = σ21. (51) eq_2_49
Analoge Uberlegungen gelten auch bezuglich der beiden anderen Koordinatenebenen
σij = σji bzw. σ = σT . (52) eq_2_50
Die Herleitung setzt voraus, dass der materielle Punkt als mathematischer Punkt die physi-kalischen Gegebenheiten korrekt abbildet. Fur viele technische Anwendungen trifft dies zu,da die Mikrostruktur der Werkstoffe klein gegenuber den Bauteilabmessungen ist. Durchdie Gleichung 52 wird dann das Boltzmann-Kontinuum definiert. Man geht dabei davonaus, dass mogliche Mikrostrukturen keinen Einfluß auf das mechanische Verhalten haben.Fur miniaturisierte Bauteile oder Werkstoffe, die eine große innere Struktur aufweise, wieetwa geschaumte Materialien, trifft diese Annahme jedoch nur noch bedingt zu. In diesemFall mussen Konzepte erweiterter Kontinua herangezogen werden. Das wohl bekanntesteerweiterte Kontinuum ist das Cosserat-Kontinuum. In diesem Fall geht man davon aus,dass die Mikrostruktur durch Starrkorper auf der Mikroskala abgebildet wird, so dassneben Kraftspannungen unabhangige Momentenspannungen auf den Randern des mate-riellen Volumenelements auftreten konnen. In diesem Fall ist der Spannungstensor nichtmehr symmetrisch.
Fur die weiteren Untersuchungen wird die Symmetrie des Spannungstensors vorausgesetzt.Die Drallbilanz liefert keine zusatzlichen Informationen, wenn man fur die Konstitutivglei-chungen, die den Zusammenhang zwischen den Spannungen und den kinematischen Großenherstellen, einen Ansatz wahlt, der nur symmetrische Spannungszustande gestattet.
Die Kinemati und die Massen-, Impuls- und Drallbilanz liefern im Fall der geometrischlinearen Kontinuumsmechanik die folgenden Aussagen
εεε = 12
(Grad u + (Grad u)T
),
ρ = ρ0 (1− trεεε),
ρ v = b + Divσ,
σ = σT .
(53) eq_2_51
2.4 Das verallgemeinerte Hookesche Gesetzsec_hooke
Die Gleichung 533 gestattet die Berechnung der Verschwindigkeit (bzw. nach einer zeitli-chen Integration der Verschiebung), wenn die Spannung als Funktion der Dehnung gegebenist. Da die Herleitung der Gleichungen bislang keine Annahme uber das Materialverhaltenbeinhaltet, sondern nur von der Annahme kleiner Verschiebungen und kleiner Verschie-bungsgradienten Gebrauch macht, muss der Zusammenhang zwischen den Spannungen
α-Version vom 3.12.2016 29
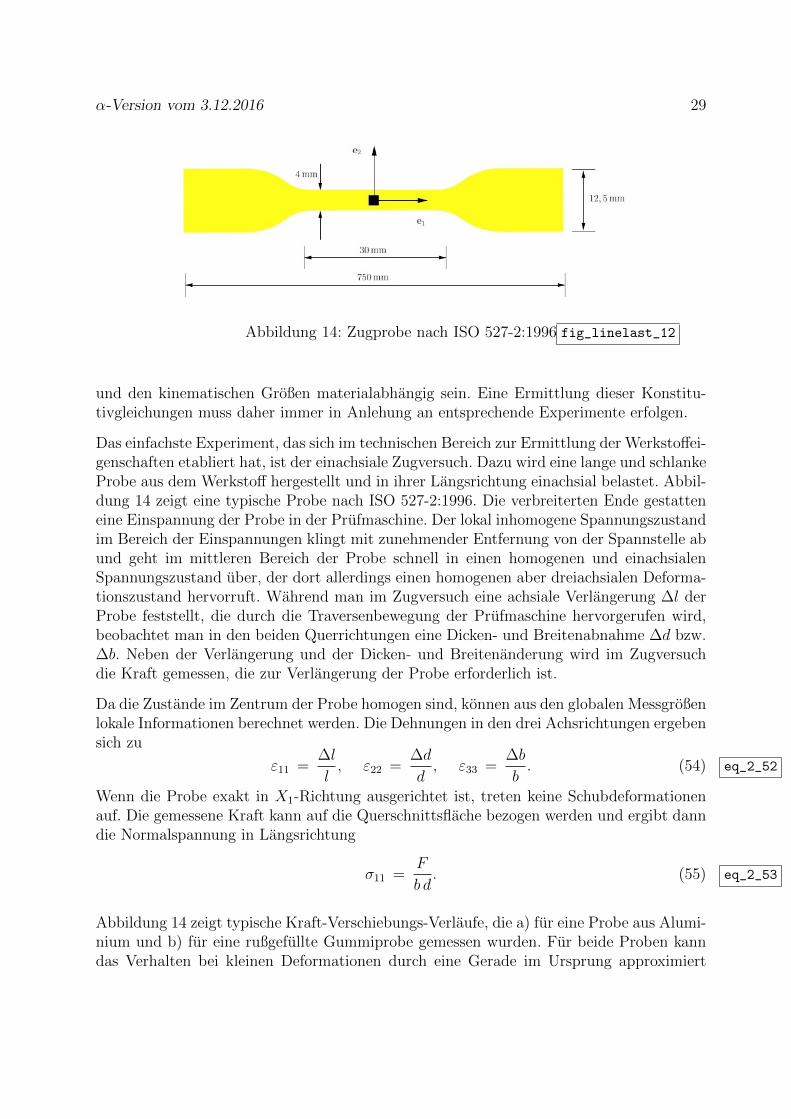
Abbildung 14: Zugprobe nach ISO 527-2:1996 fig_linelast_12
und den kinematischen Großen materialabhangig sein. Eine Ermittlung dieser Konstitu-tivgleichungen muss daher immer in Anlehung an entsprechende Experimente erfolgen.
Das einfachste Experiment, das sich im technischen Bereich zur Ermittlung der Werkstoffei-genschaften etabliert hat, ist der einachsiale Zugversuch. Dazu wird eine lange und schlankeProbe aus dem Werkstoff hergestellt und in ihrer Langsrichtung einachsial belastet. Abbil-dung 14 zeigt eine typische Probe nach ISO 527-2:1996. Die verbreiterten Ende gestatteneine Einspannung der Probe in der Prufmaschine. Der lokal inhomogene Spannungszustandim Bereich der Einspannungen klingt mit zunehmender Entfernung von der Spannstelle abund geht im mittleren Bereich der Probe schnell in einen homogenen und einachsialenSpannungszustand uber, der dort allerdings einen homogenen aber dreiachsialen Deforma-tionszustand hervorruft. Wahrend man im Zugversuch eine achsiale Verlangerung ∆l derProbe feststellt, die durch die Traversenbewegung der Prufmaschine hervorgerufen wird,beobachtet man in den beiden Querrichtungen eine Dicken- und Breitenabnahme ∆d bzw.∆b. Neben der Verlangerung und der Dicken- und Breitenanderung wird im Zugversuchdie Kraft gemessen, die zur Verlangerung der Probe erforderlich ist.
Da die Zustande im Zentrum der Probe homogen sind, konnen aus den globalen Messgroßenlokale Informationen berechnet werden. Die Dehnungen in den drei Achsrichtungen ergebensich zu
ε11 =∆l
l, ε22 =
∆d
d, ε33 =
∆b
b. (54) eq_2_52
Wenn die Probe exakt in X1-Richtung ausgerichtet ist, treten keine Schubdeformationenauf. Die gemessene Kraft kann auf die Querschnittsflache bezogen werden und ergibt danndie Normalspannung in Langsrichtung
σ11 =F
b d. (55) eq_2_53
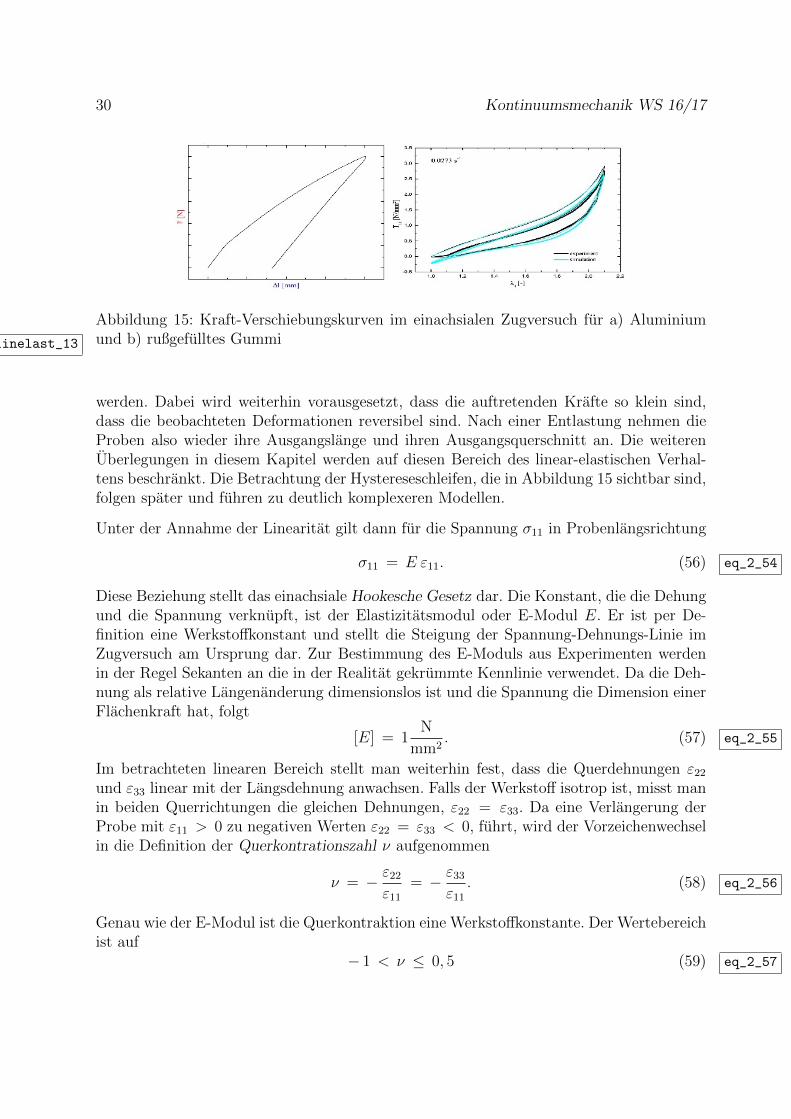
Abbildung 14 zeigt typische Kraft-Verschiebungs-Verlaufe, die a) fur eine Probe aus Alumi-nium und b) fur eine rußgefullte Gummiprobe gemessen wurden. Fur beide Proben kanndas Verhalten bei kleinen Deformationen durch eine Gerade im Ursprung approximiert
30 Kontinuumsmechanik WS 16/17
Abbildung 15: Kraft-Verschiebungskurven im einachsialen Zugversuch fur a) Aluminiumund b) rußgefulltes Gummifig_linelast_13
werden. Dabei wird weiterhin vorausgesetzt, dass die auftretenden Krafte so klein sind,dass die beobachteten Deformationen reversibel sind. Nach einer Entlastung nehmen dieProben also wieder ihre Ausgangslange und ihren Ausgangsquerschnitt an. Die weiterenUberlegungen in diesem Kapitel werden auf diesen Bereich des linear-elastischen Verhal-tens beschrankt. Die Betrachtung der Hystereseschleifen, die in Abbildung 15 sichtbar sind,folgen spater und fuhren zu deutlich komplexeren Modellen.
Unter der Annahme der Linearitat gilt dann fur die Spannung σ11 in Probenlangsrichtung
σ11 = E ε11. (56) eq_2_54
Diese Beziehung stellt das einachsiale Hookesche Gesetz dar. Die Konstant, die die Dehungund die Spannung verknupft, ist der Elastizitatsmodul oder E-Modul E. Er ist per De-finition eine Werkstoffkonstant und stellt die Steigung der Spannung-Dehnungs-Linie imZugversuch am Ursprung dar. Zur Bestimmung des E-Moduls aus Experimenten werdenin der Regel Sekanten an die in der Realitat gekrummte Kennlinie verwendet. Da die Deh-nung als relative Langenanderung dimensionslos ist und die Spannung die Dimension einerFlachenkraft hat, folgt
[E] = 1N
mm2. (57) eq_2_55
Im betrachteten linearen Bereich stellt man weiterhin fest, dass die Querdehnungen ε22
und ε33 linear mit der Langsdehnung anwachsen. Falls der Werkstoff isotrop ist, misst manin beiden Querrichtungen die gleichen Dehnungen, ε22 = ε33. Da eine Verlangerung derProbe mit ε11 > 0 zu negativen Werten ε22 = ε33 < 0, fuhrt, wird der Vorzeichenwechselin die Definition der Querkontrationszahl ν aufgenommen
ν = − ε22
ε11
= − ε33
ε11
. (58) eq_2_56
Genau wie der E-Modul ist die Querkontraktion eine Werkstoffkonstante. Der Wertebereichist auf
− 1 < ν ≤ 0, 5 (59) eq_2_57

α-Version vom 3.12.2016 31
beschrankt. Wahrend die obere Grenz den inkompressiblen Grenzfall darstellt, bei demder Werkstoff keine Volumendehnungen erfahrt, folgt die untere Grenze aus thermodyna-mischen Restriktionen. Die meisten technischen Werkstoffe zeigen jedoch ein Verhalten, dasauf positive Werte fur ν fuhrt. Materialien mit negativen Querkontraktionszahlen werdenals auxetisch bezeichnet. Dieses Verhalten kann beobachtet werden, wenn nicht-konvexeMikrostrukturen vorliegen. In der Regel ist auxetisches Verhalten mit einer ausgepragenAnisotropie verbunden und wird daher im Weiteren nicht naher behandelt.
Aus diesen Uberlegungen folgt, dass zur Beschreibung linear-elastischen Verhaltens zweiKonstanten benotigt werden. Am einachsialen Zugversuch wird so einer technischen Sicht-weise die Einfuhrung des E-Moduls und der Querkontraktionszahl motiviert. Von mathe-matischer Seite sind die Lameschen Konstantenµ und λ gunstiger. Ein dreidimensionalerZusammenhang zwischen dem Spannungstensor und dem Dehnungstensor laasst sich mitden Lame-Parameter als
σ = 2µεεε + λ tr(εεε) I (60) eq_2_58
angeben. Dabei wird die Volumendehnung tr(εεε) I durch den zweiten Parameter λ getrenntbewertet. Formale Uberlegungen im Rahmen des Tensorkalkuls zeigen, dass der Zusammen-hang 60 der generelle lineare Zusammenhang zwischen zwei isotropen Tensoren ist. Durchdie Betrachtung des eindimensionalen Zugversuchs als Sonderfall kann der Zusammenhangzwischen den beiden Lameschen Parametern µ und λ und den Ingenieurkonstanten E undν gezeigt werden.
Das allgemeine Materialgesetz der linearen Elastizitat 60 geht mit den Annahmen deseinachsialen Zugs fur den Spannungs- und Dehnungszustand uber in die Koeffizientendar-stellung σ11 0 0
0 0 00 0 0
= 2µ
ε11 0 00 ε22 00 0 ε33
+ λ (ε11 + ε22 + ε33)
1 0 00 1 00 0 1
. (61) rheo120a
Die Querdehnungen ε22 und ε33 sind im einachsialen Zugversuch gleich, wenn das Materi-alverhalten isotrop ist. Aus der zweiten bzw. dritten Gleichung folgt der Zusammenhangzwischen der Langsdehnung ε11 und den Querdehnungen zu
ε22 = ε33 = − λ
2 (µ + λ)ε11 =: − ν ε11. (62) rheo130
Einsetzen dieses Ergebnisses in die erste Gleichung liefert schließlich den Zusammenhangzwischen Zugspannung und Achsialdehnung
σ11 =µ (3λ + 2µ)
λ + µε11 =: E ε11. (63) rheo140
Aus dem direkten Vergleich der Koeffizienten in den Gleichungen von 62 und 63 folgt dieIdentifikation des Elastizitatsmodul
E =µ (3λ + 2µ)
λ + µ. (64) rheo160

32 Kontinuumsmechanik WS 16/17
und der Querdehnzahl
ν =λ
2 (µ + λ). (65) rheo180
Ein weiterer Versuch zur Materialcharakerisierung ist der einfachen Scherversuch. Dazuwird eine Probe auf zwei parallel liegenden Rander durch eine tangential Verschiebung be-lastet. Dabei treten idealerweise nur Schubspannungen τ = σ12 und Gleitungen γ = 2 ε12
auf. Von Seiten der experimentellen Mechanik ist der Scherversuch außerst komplex. Erwird in der skizzierten Form eigentlich nicht durchgefuhrt, da sich in der Realitat stark in-homogene Spannungsverteilungen in den Ecken der Probe ausbilden. Die Realisierung einesSchubspannungszustandes geschieht in der Regel durch Torsionsversuche an dunnwandigenRohren.
Der allgemeine Zusammenhang ?? lautet fur den Schubversuch
τ = µ γ = 2µ ε12. (66) rheo190
Damit identifiziert man den Schermodul aus dem allgemeinen Ansatz als
G = µ. (67) rheo200
Schließlich findet man im hydrostatischen Kompressionsversuch einen Zusammenhang zwi-schen der Volumendehnung e = trεεε und der mittleren Normalspannung σm = 1
3trσ
σm = − p = k e (68) rheo210
Aus dem Vergleich von 68 mit der allgemeinen Darstellung ?? ergibt sich in diesem Falldie Identifikation des Kompressionsmoduls
k = 2µ + 3λ. (69) rheo240
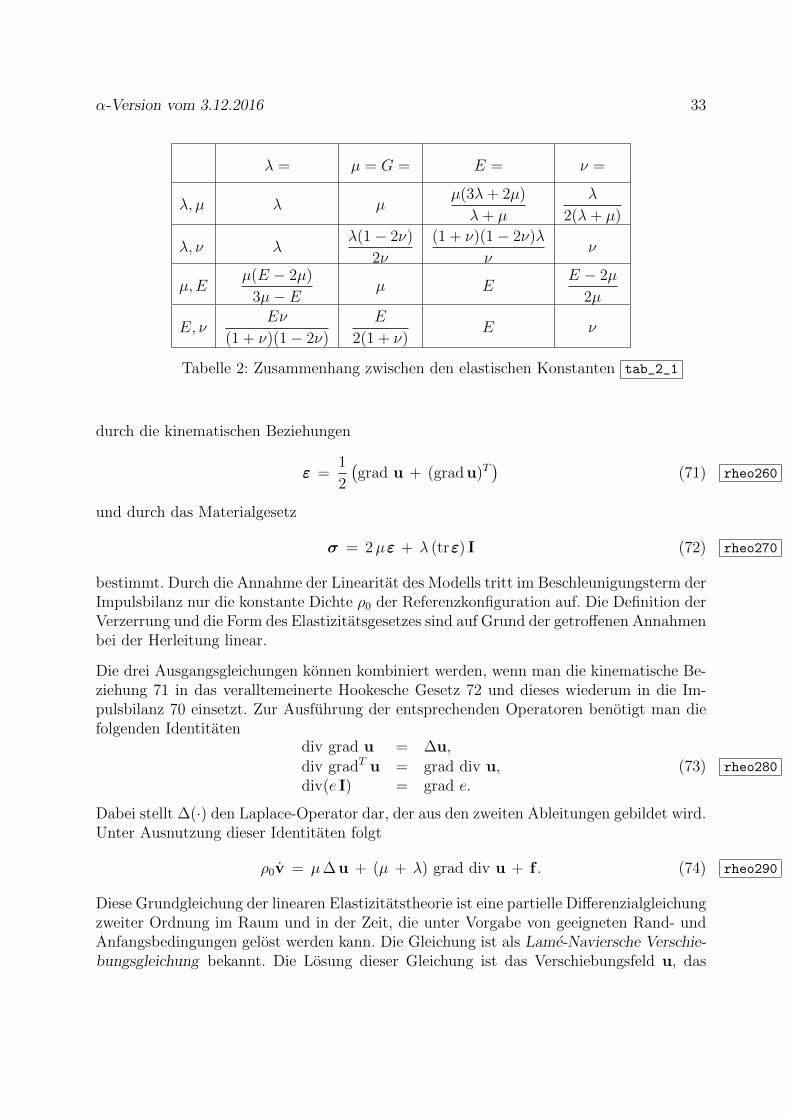
Insgesamt benutzt man in der linearen Elastizitatstheorie 6 verschiedene Konstanten, vondenen jedoch nur zwei unabhangig sind. Die mathematische Form eines linearen Zusam-menhangs zwischen zwei Tensoren verwendet dabei haufig die beiden die Lame-Konstantenµ und λ. Die anderen Konstanten sind den typischen Randwertproblemen angepasst. DerElastizitatsmodul E und die Querkontraktionszahl ν entstammen dem einachsialen Zug-versuch, der Schubmodul G und der Kompressionsmodul k konnen direkt in den jeweiligenVersuchen ermittelt werden. Sind zwei der insgesamt sechs Konstanten bekannt, so konnendann die verbleibenden vier Konstanten durch diese beiden a usgedruckt werden. EineZusammenstellung findet sich in Tabelle 2.
Das Randwertproblem der linearen Elastiztitatstheorie wird durch die Impulsbilanz in derlokalen Form
ρ0v = div σ + b, (70) rheo250
α-Version vom 3.12.2016 33
λ = µ = G = E = ν =
λ, µ λ µµ(3λ+ 2µ)
λ+ µ
λ
2(λ+ µ)
λ, ν λλ(1− 2ν)
2ν
(1 + ν)(1− 2ν)λ
νν
µ,Eµ(E − 2µ)
3µ− Eµ E
E − 2µ
2µ
E, νEν
(1 + ν)(1− 2ν)
E
2(1 + ν)E ν
Tabelle 2: Zusammenhang zwischen den elastischen Konstanten tab_2_1
durch die kinematischen Beziehungen
εεε =1
2
(grad u + (grad u)T
)(71) rheo260
und durch das Materialgesetz
σ = 2µεεε + λ (trεεε) I (72) rheo270
bestimmt. Durch die Annahme der Linearitat des Modells tritt im Beschleunigungsterm derImpulsbilanz nur die konstante Dichte ρ0 der Referenzkonfiguration auf. Die Definition derVerzerrung und die Form des Elastizitatsgesetzes sind auf Grund der getroffenen Annahmenbei der Herleitung linear.
Die drei Ausgangsgleichungen konnen kombiniert werden, wenn man die kinematische Be-ziehung 71 in das veralltemeinerte Hookesche Gesetz 72 und dieses wiederum in die Im-pulsbilanz 70 einsetzt. Zur Ausfuhrung der entsprechenden Operatoren benotigt man diefolgenden Identitaten
div grad u = ∆u,div gradT u = grad div u,div(e I) = grad e.
(73) rheo280
Dabei stellt ∆(·) den Laplace-Operator dar, der aus den zweiten Ableitungen gebildet wird.Unter Ausnutzung dieser Identitaten folgt
ρ0v = µ∆ u + (µ + λ) grad div u + f . (74) rheo290
Diese Grundgleichung der linearen Elastizitatstheorie ist eine partielle Differenzialgleichungzweiter Ordnung im Raum und in der Zeit, die unter Vorgabe von geeigneten Rand- undAnfangsbedingungen gelost werden kann. Die Gleichung ist als Lame-Naviersche Verschie-bungsgleichung bekannt. Die Losung dieser Gleichung ist das Verschiebungsfeld u, das
34 Kontinuumsmechanik WS 16/17
sich unter den gegebenen Belastungen einstellt. Die Belastungen erfolgen dabei einerseitsuber die Volumenkraft b und andererseits uber Randlasten t, die durch entsprechendeRandbedingungen vorgegeben werden. Ist das Verschiebungsfeld bekannt, so konnen dieVerzerrungen und die Spannungen aus den Beziehungen 71 und 72 berechnet werden. InSonderfallen kann die Lame-Naviersche Gleichung analytisch gelost werden, haufig bedientman sich jedoch numerischer Naherungsverfahren, z. B. der Methode der Finiten Elemente(FEM), um die Losung zu approximieren.
Das hier skizzierte Vorgehen ist typisch fur die Entwicklung eines mechanischen Modells.Grundsatzlich werden Bilanzgleichungen (physikalische Erhaltungsgleichungen) mit kine-matischen Beziehungen (Beschreibung des Bewegungs- oder Verschiebungszustands) undmit Stoffgesetzen (hier: lineare Elastizitat, verallgemeinertes Hookesches Gesetz) kombi-niert. Das entstehende System von Differenzialgleichungen kann dann bei Vorgabe vonRand- und Anfangsbedingungen (meist numerisch) gelost werden.

α-Version vom 3.12.2016 35
3 Tensorrechnung
Im vorherigen Kapitel sind die Grundgleichungen der linearen Elastitzitatstheorie herge-leitet worden. Dabei wurden die Herleitungen an einem Voluemelement motiviert, das ausdem materiellen Korper herausgeschnittn wurde. Im Nachgang konnte der Grenzfall einesinfinitesimal kleinen Volumenelements untersucht werden, in dem der Grenzwert ∆V → 0durchgruhrt wurde. Die Herleitungen haben dabei in anschaulicher Weise Gebrauch vonbekannten Aussagen der Differentialrechung und der Vektorrechnung gemacht. Die Anord-nung von drei Koeffizienten von jeweils drei Vektoren in Matrizen hat die Einfuhrung vonTensoren mitgebracht. Im vorliegenden Kapitel werden die Uberlegungen dazu auf ein ent-sprechendes theoretisches Fundament gestellt und in eine formale Darstellung eingebettet,da die Tensoralgebra und -analysis ein wesentliches Werkzeug der Kontinuumsmechanikdarstellt.
3.1 Tensoralgebra
Grundsatzlich ist fur die Darstellung physikalischer Großen eine unterschiedliche Anzahlvon Maßzahlen notwendig. Wenn die Angabe einer Maßzahl ausreicht, um eine physika-lische Große zu definieren, so ist diese Große ein Skalar. Typische skalare Großen sinddie Dichte ρ oder die Temperatur θ. Zur Darstellung von Kraften oder Verschiebungenbenotigt man entweder die Angabe einer Maßzahl und einer Richtung oder von drei Maß-zahlen. Die entsprechenden physikalischen Großen haben vektoriellen Charakter. Bei derEinfuhrung des Spannungsbegriffs und der Verzerrung wurde deutlich, dass in diesen Fallenneun Maßzahlen2 zur Festlegung der physikalischen Große gegeben sein mussen. Genau wiebei Vektoren sind die Zahlenwerte, die in dem zugehorigen Matrixschema angegeben wer-den, von der Wahl des konkreten Koordinatensystems abhangig. Damit die physikalischenGroßen unabhangig von einer willkurlichen Wahl des Koordinatensystems sind, mussensich die Koeffizienten nach ganz bestimmten Regeln andern, wenn eine Koordinatentrans-formation durchgefuhrt wird. Dieses Transformationsverhalten unterscheidet Tensoren alsphysikalisch motivierte Großen von Matrizen, deren Koeffizienten grundsatzlich beliebigsein konnen.
In diesem Kapitel werden die Darstellungsmoglichkeiten fur Vektoren und Tensoren dis-kutiert. Daraus ergeben sich Rechenregeln, mit denen unterschiedliche Darstellungen in-einander uberfuhrt werden konnen. Bereits im vorherigen Kapitel wurde deutlich, dassverschiedene Darstellungen unterschiedliche Vorteile mitsichbringen. Die absolute Darstel-lung gestattet z.B. eine kompakte Darstellung der Ergebisse, die vor allem fur Herleitungenhilfreich ist, wahrend eine Koeffizientendarstellung haufig unubersichtlich und umfangreichwird, zur konkreten Berechnung aber unerlaßlich ist.
2Auf Grund der Symmetrie beschrankt sich die Anzahl der unabhangigen Koeffizienten haufig auf sechs.
36 Kontinuumsmechanik WS 16/17
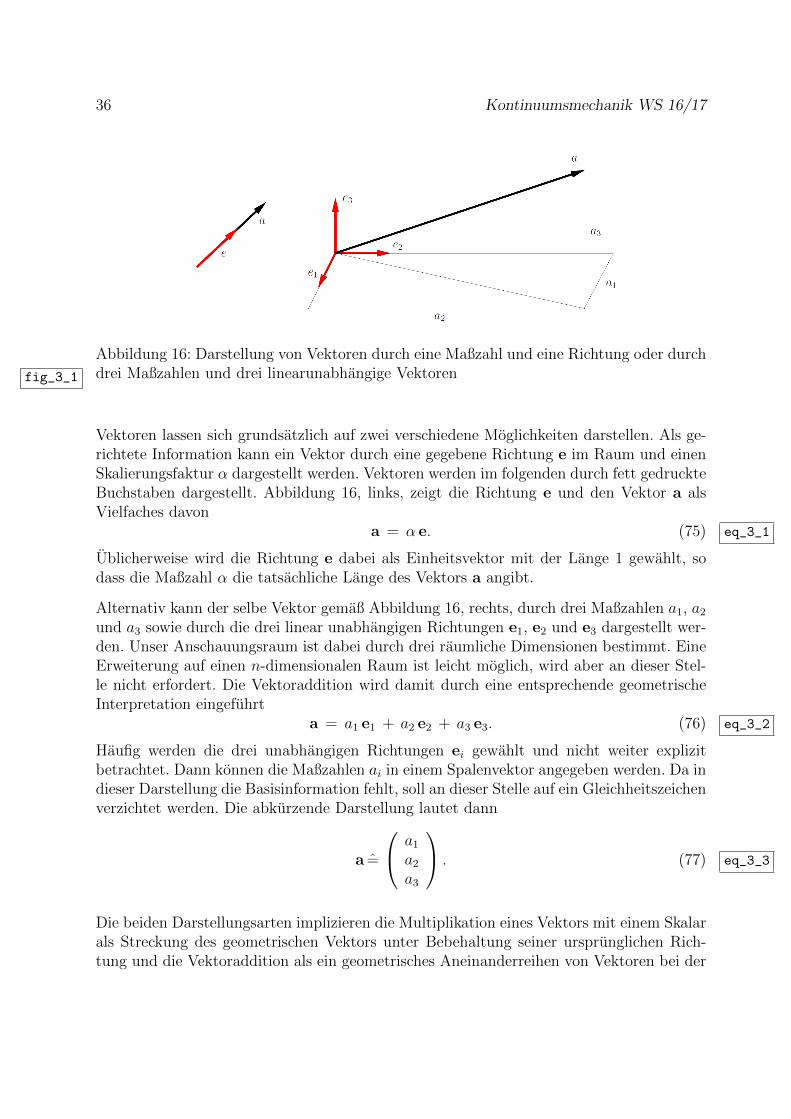
Abbildung 16: Darstellung von Vektoren durch eine Maßzahl und eine Richtung oder durchdrei Maßzahlen und drei linearunabhangige Vektorenfig_3_1
Vektoren lassen sich grundsatzlich auf zwei verschiedene Moglichkeiten darstellen. Als ge-richtete Information kann ein Vektor durch eine gegebene Richtung e im Raum und einenSkalierungsfaktur α dargestellt werden. Vektoren werden im folgenden durch fett gedruckteBuchstaben dargestellt. Abbildung 16, links, zeigt die Richtung e und den Vektor a alsVielfaches davon
a = α e. (75) eq_3_1
Ublicherweise wird die Richtung e dabei als Einheitsvektor mit der Lange 1 gewahlt, sodass die Maßzahl α die tatsachliche Lange des Vektors a angibt.
Alternativ kann der selbe Vektor gemaß Abbildung 16, rechts, durch drei Maßzahlen a1, a2
und a3 sowie durch die drei linear unabhangigen Richtungen e1, e2 und e3 dargestellt wer-den. Unser Anschauungsraum ist dabei durch drei raumliche Dimensionen bestimmt. EineErweiterung auf einen n-dimensionalen Raum ist leicht moglich, wird aber an dieser Stel-le nicht erfordert. Die Vektoraddition wird damit durch eine entsprechende geometrischeInterpretation eingefuhrt
a = a1 e1 + a2 e2 + a3 e3. (76) eq_3_2
Haufig werden die drei unabhangigen Richtungen ei gewahlt und nicht weiter explizitbetrachtet. Dann konnen die Maßzahlen ai in einem Spalenvektor angegeben werden. Da indieser Darstellung die Basisinformation fehlt, soll an dieser Stelle auf ein Gleichheitszeichenverzichtet werden. Die abkurzende Darstellung lautet dann
a =
a1
a2
a3
. (77) eq_3_3
Die beiden Darstellungsarten implizieren die Multiplikation eines Vektors mit einem Skalarals Streckung des geometrischen Vektors unter Bebehaltung seiner ursprunglichen Rich-tung und die Vektoraddition als ein geometrisches Aneinanderreihen von Vektoren bei der
α-Version vom 3.12.2016 37
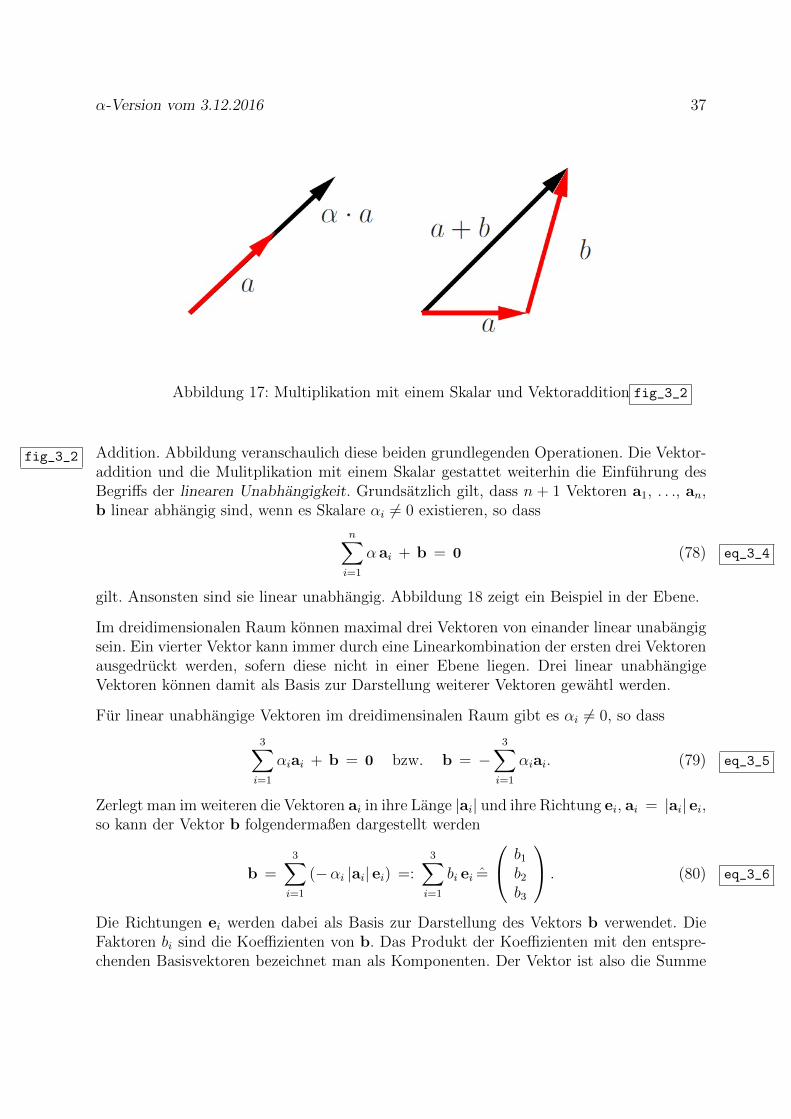
Abbildung 17: Multiplikation mit einem Skalar und Vektoraddition fig_3_2
Addition. Abbildung veranschaulich diese beiden grundlegenden Operationen. Die Vektor-fig_3_2addition und die Mulitplikation mit einem Skalar gestattet weiterhin die Einfuhrung desBegriffs der linearen Unabhangigkeit. Grundsatzlich gilt, dass n + 1 Vektoren a1, . . ., an,b linear abhangig sind, wenn es Skalare αi 6= 0 existieren, so dass
n∑i=1
α ai + b = 0 (78) eq_3_4
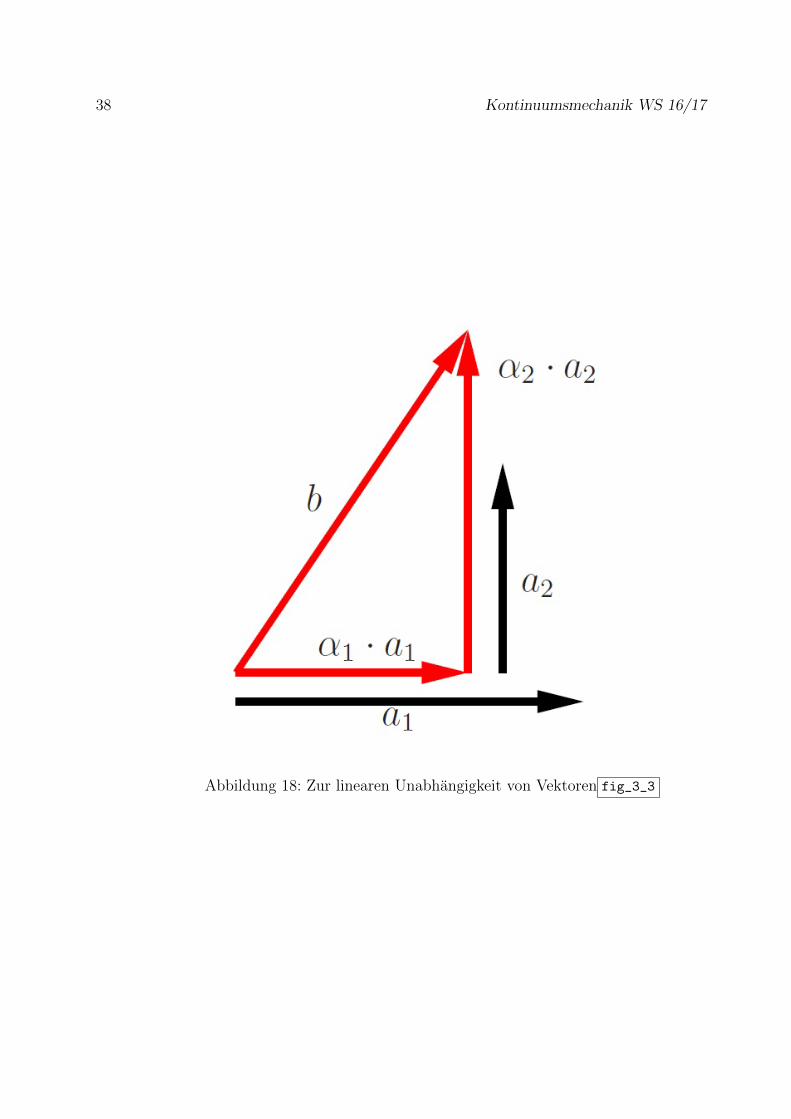
gilt. Ansonsten sind sie linear unabhangig. Abbildung 18 zeigt ein Beispiel in der Ebene.
Im dreidimensionalen Raum konnen maximal drei Vektoren von einander linear unabangigsein. Ein vierter Vektor kann immer durch eine Linearkombination der ersten drei Vektorenausgedruckt werden, sofern diese nicht in einer Ebene liegen. Drei linear unabhangigeVektoren konnen damit als Basis zur Darstellung weiterer Vektoren gewahtl werden.
Fur linear unabhangige Vektoren im dreidimensinalen Raum gibt es αi 6= 0, so dass
3∑i=1
αiai + b = 0 bzw. b = −3∑i=1
αiai. (79) eq_3_5
Zerlegt man im weiteren die Vektoren ai in ihre Lange |ai| und ihre Richtung ei, ai = |ai| ei,so kann der Vektor b folgendermaßen dargestellt werden
b =3∑i=1
(−αi |ai| ei) =:3∑i=1
bi ei =
b1
b2
b3
. (80) eq_3_6
Die Richtungen ei werden dabei als Basis zur Darstellung des Vektors b verwendet. DieFaktoren bi sind die Koeffizienten von b. Das Produkt der Koeffizienten mit den entspre-chenden Basisvektoren bezeichnet man als Komponenten. Der Vektor ist also die Summe
38 Kontinuumsmechanik WS 16/17
Abbildung 18: Zur linearen Unabhangigkeit von Vektoren fig_3_3

α-Version vom 3.12.2016 39
seiner Komponenten, die Komponenten sind wiederum das Produkt der Koeffizienten mitden Basisvektoren3 Eine Normierung der Basis ist nicht zwingend erforderlich. Weiterhinverlangt die Darstellung 80 nicht, dass die Basisvektoren paarweise senkrecht stehen. Dieeinzige Bedingung, die die Basis erfullen muß, ist die lineare Unabhangigkeit der Basisvek-toren.
Die haufig verwendete kartesische Basis, auf die sich die weiteren Ausfuhrungen beziehen,besteht aus drei normierten und paarweise senkrecht auf einander stehenden Basisvektoren.Dann gilt
|ei| = 1, e1 ⊥ e2, e3, e2 ⊥ e3, e1, e3 ⊥ e1, e2. (81) eq_3_7
Fur die folgenden Ausfuhrungen bietet neben den Darstellungen 80 die Einsteinsche Sum-menkonvention eine elegante Moglichkeit, um Vektoren und andere tensorielle Großen dar-zustellen. Nach der Summenkonvention verzichtet man auf die explizite Darstellung desSummenzeichens, so dass sich 80 zu
b =3∑i=1
bi ei = bi ei (82) eq_3_8
verkurzt. Uber einen Index, der in einem Produkt doppelt auftritt, wird gemaß der Kon-vention summiert. Fur Vektoroperationen im dreidimensionalen Raum ist die Summationdabei immer uber die Werte i = 1, 2, 3 auszufuhren.
Neben der Multiplikation mit einem Skalar und der Vektoraddition ist die Skalarmultipli-kation von zwei Vektoren, die als Ergebnis des Produktes eine Zahl liefert, eine wesentlicheOperation. Zeichen fur die skalare Multiplikation von zwei Vektoren ist der Punkt, a · b.Die Skalarmultiplikation wird ebenfalls geometrisch motiviert und entspricht der Projek-tion eines Vektor b auf einen Vektor a. Gemaß Abbildung 19 wird dazu der Winkel αbenotigt, der von den beiden Vektoren eingeschlossen ist. Dann gilt
a · b = b · a = |a| |b| cosα. (83) eq_3_9
Wahlt man den Vektor b = e als Einheitsvektor so folgt
a · e = |a| cosα (84) eq_3_10
Insbesondere ergibt sich bei Wahl der Basisvektoren eines kartesischen Systems
a · e1 = |a| cos(a, e1) = a1, a · e2 = |a| cos(a, e2) = a2, a · e3 = |a| cos(a, e3) = a3
(85) eq_3_11
Der Cosinus der jeweiligen Ausdrucke wird dabei mit dem Winkel gebildet der von amit der jeweiligen Koordinatenachse eingeschlossen wird. Mit Bezug auf die geometrische
3Haufig wird nicht zwischen Koeffizienten und Komponten unterschieden, da sich alle Betrachtungenauf eine Basis beziehen, die einmal festgelegt und dann nicht mehr geandert wird.
40 Kontinuumsmechanik WS 16/17
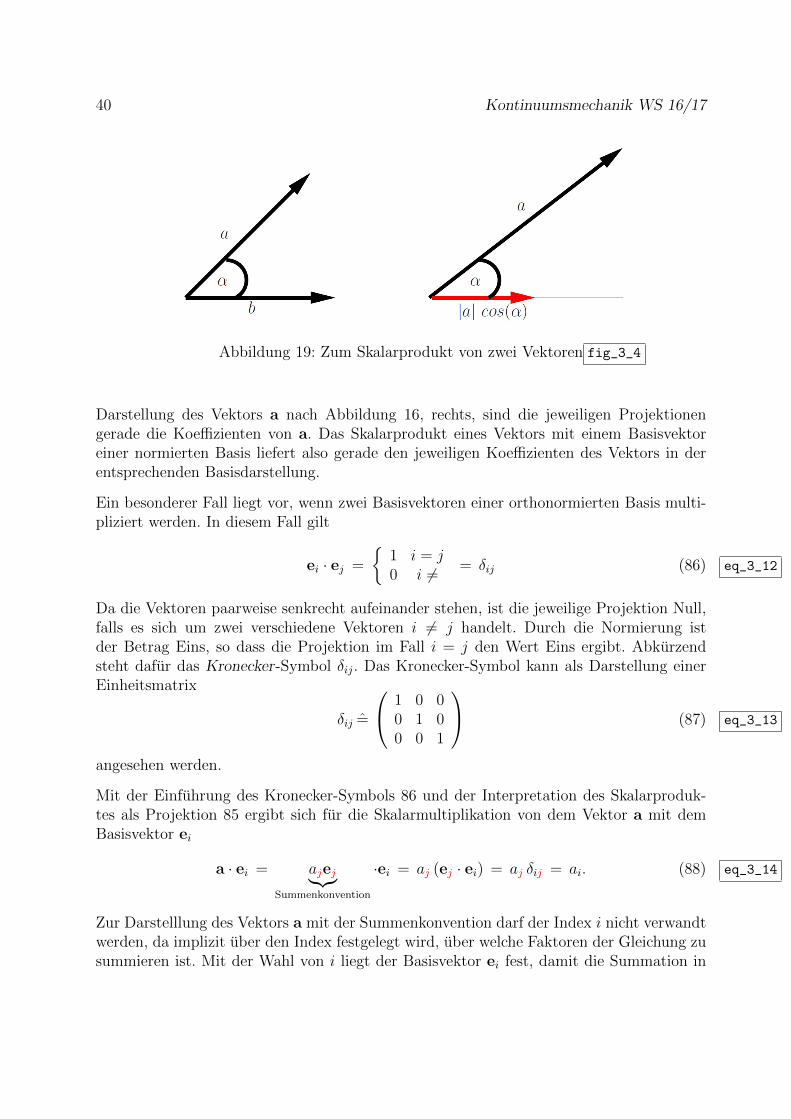
Abbildung 19: Zum Skalarprodukt von zwei Vektoren fig_3_4
Darstellung des Vektors a nach Abbildung 16, rechts, sind die jeweiligen Projektionengerade die Koeffizienten von a. Das Skalarprodukt eines Vektors mit einem Basisvektoreiner normierten Basis liefert also gerade den jeweiligen Koeffizienten des Vektors in derentsprechenden Basisdarstellung.
Ein besonderer Fall liegt vor, wenn zwei Basisvektoren einer orthonormierten Basis multi-pliziert werden. In diesem Fall gilt
ei · ej =
{1 i = j0 i 6= = δij (86) eq_3_12
Da die Vektoren paarweise senkrecht aufeinander stehen, ist die jeweilige Projektion Null,falls es sich um zwei verschiedene Vektoren i 6= j handelt. Durch die Normierung istder Betrag Eins, so dass die Projektion im Fall i = j den Wert Eins ergibt. Abkurzendsteht dafur das Kronecker-Symbol δij. Das Kronecker-Symbol kann als Darstellung einerEinheitsmatrix
δij =
1 0 00 1 00 0 1
(87) eq_3_13
angesehen werden.
Mit der Einfuhrung des Kronecker-Symbols 86 und der Interpretation des Skalarproduk-tes als Projektion 85 ergibt sich fur die Skalarmultiplikation von dem Vektor a mit demBasisvektor ei
a · ei = ajej︸︷︷︸Summenkonvention
·ei = aj (ej · ei) = aj δij = ai. (88) eq_3_14
Zur Darstelllung des Vektors a mit der Summenkonvention darf der Index i nicht verwandtwerden, da implizit uber den Index festgelegt wird, uber welche Faktoren der Gleichung zusummieren ist. Mit der Wahl von i liegt der Basisvektor ei fest, damit die Summation in

α-Version vom 3.12.2016 41
?? eindeutig ist, muss daher als Summationsindex ein anderer Index gewahlt werden. EinIndex darf als in einer Gleichung aus Grunden der Eindeutigkeit im Rahmen der Summen-konvention maximal zweimal auftreten. Im vorliegenden Fall ist j ein stummer Index, derdie Summation andeutet. Dieser Index darf beliebig umbenannt werden (ausser in i), einIndexpaar k anstelle von j impliziert an dieser Stelle die selbe Summation. Multipliziertman die Summe ajej mit dem Vektor ei aus, so entstehen in jedem der drei Summan-den Ausdrucke der Form ej · ei, die nach 86 ein Kronecker-Symbold darstellen. Da diesesSymbol nur dann den Wert Eins annimmt, wenn beide Indices gleich sind, werden nur dieSummanden ungleich Null, in denen i = j ist.
Ubertragt man diesen Sachverhalt auf das Skalarprodukt der beiden beliebigen Vektorena und b, so entsteht
a · b = aiei · bjej = ai bj (ei · ej) = ai bj δij = ai bi = a1b1 + a2b2 + a3b3. (89) eq_3_15
Die entsprechenden Summationen sind wieder farblich markiert. In jedem Summandenwerden die Skalarprodukte zwischen den Basisvektoren ausgefuhrt, womit wiederum dasKronecker-Symbol entsteht. Eine der verbleibenden Summationen kann dann mit der Ei-genschaft des Kronecker-Symbols ausgefuhrt werden, es muss also wiederum i = j sein, sodass schließlich die einfache Summe bleibt, die hier nochmals ausgeschrieben ist.
Als nachste Große werden Tensoren 2. Stufe eingefuhrt. Von ihrer Interpretation handeltes sich bei Tensoren um lineare Abbildungen, die einen Vektor b auf einen anderen Vektora abbilden. Es gilt dann
a = T · b. (90) eq_3_16
Der Tensors selber kann uber ein neues Produkt, das dyadische Produkt von zwei Vektoreneingefuhrt werden,
T = c⊗ d. (91) eq_3_17
Das Symbol ⊗ deutet dabei an, dass die beiden Vektoren c und d so verknupft werden, dassein Tensor 2. Stufe entsteht. Die Eigenschaften des Tensors bzw. des dyadischen Produktesergeben sich aus der Rechenregel, die die Anwendung der linearen Abbildung 90 gestattet.
T · b = (c⊗ d) · b︸ ︷︷ ︸Skalarprod.
= (d · b) c = a. (92) eq_3_18
Der Vektor a ist demnach parallel zu dem Vektor c, der um den Betrag des Produktes d ·bgestreckt oder gestaucht wird. Da in diesem Ausdruck der Vektor b linear auftritt und dasErgebnis ein Vektor ist, handelt es sich bei dem Tensor T tatsachlich um die gefordertelineare Abbildung von b auf a.
Definiert man die Eigenschaft der linearen Abbildung uber das dyadische Produkt mit derzugehorigen Rechenregel, dann kann man die folgende Koeffizientendarstellung ermitteln.
T = c⊗ d = ciei ⊗ djej = (ci dj) ei ⊗ ej = Tij ei ⊗ ej. (93) eq_3_19
42 Kontinuumsmechanik WS 16/17
Mit Bezug auf die kartesiche Basis ei kann der Tensor genau wie ein Vektor als Summeseiner Komponenten dargestellt werden. In diesem Fall impliziert die Summenkonventioneinen Doppelsumme uber die Indices i und j, da beide im endgultigen Ausdruck jeweilsdoppelt auftreten. Die Komponenten des Tensors bestehen wieder aus den KoeffizientenTij = ai bj und den Basistensoren ei ⊗ ej. Die dyadischen Produkte definieren also eineBasis im neundimensionalen Raum der linearen Abbildungen. Die Koeffizienten des Tensorskonnen als Matrixschema
Tij =
T11 T12 T13
T11 T12 T13
T11 T12 T13
. (94) eq_3_20
angegeben werden, wobei die Information bezuglich der gewahlten Bais nicht enthalten ist.
Die lineare Abbildung kann nun fur die Basisdarstellung des Tensors 93 ausgefuhrt werden.Man erhalt
a = T · b = Tijei ⊗ ej · bkek = (Tijbk) ei ⊗ ej · ek = (Tijbk) δjk ei. (95) eq_3_21
Nutzt man schließlich die Eigenschaft des Kroncker-Symbols4 aus, so reduziert sich derletzte Ausdruck zu
a = T · b = (Tijbj) ei = ai ei. (96) eq_3_22
Demnach sind die Koeffizienten des Vektors a uber die Summen
ai = Tijbj (97) eq_3_23
definert. Beschrankt man sich auf die Darstellung des Tensors als 3×-Matrix und desVektors als Spalte, so entspricht 97 dem ublichen Matrix-Vektor-Produkt im Sinn vonZeile mal Spalte. a1
a2
a3
=
T11 T12 T13
T11 T12 T13
T11 T12 T13
b1
b2
b3
=
T11b1 + T12b2 + T13b3
T21b1 + T22b2 + T23b3
T31b1 + T32b2 + T33b3
. (98) eq_3_24
Symmetrische und schiefsymmetrische Tensoren verfugen uber die folgenden besonderenEigenschaften
A = AT bzw. B = −BT . (99) eq_3_24a
Fur die jeweilige Koeffizientendarstellung gilt dementsprechend fur einen symmetrischenTensor
A = Aij ei ⊗ ej =
A11 A12 A13
A12 A22 A23
A13 A23 A33
⇒ Aij = Aji (100) eq_3_24b
4Da an dieser Stelle die Eigenschaften der orthonormierten Basis explizit eingehen, muss man bei derVerwendung krummlinieger und nicht-normierter Basis weitere Terme berucksichtigen, die die sogennanteMetrik enthalten.
α-Version vom 3.12.2016 43
und fur einen schiefsymmetrischen Tensor
B = Bij ei ⊗ ej =
0 B12 B13
−B12 0 B23
−B13 −B23 0
⇒ Bij = Bji (101) eq_3_24c
Analog zur Einheitsmatrix definiert sich der Einheitstensor uber die identische Abbildung
a = I · a (102) eq_3_25
Versieht man das Koeffizientenschema der Einheitsmatrix in Form des Kronecker-Symbolsmit der zugehorigen Basis, so hat der Einheitstensor die Darstellung
I = δij ei ⊗ ej. (103) eq_3_26
Ausfuhrung einer der beiden implizierten Summationen liefert schließlich
I = ei ⊗ ei. (104) eq_3_27
Wendet man I im Sinn einer linearen Abbildung auf einen Vektor a an, so folgt
I · a = ei ⊗ ei · ajej = aj δij ei = ai ei = a, (105) eq_3_28
womit die geforderte Eigenschaft gezeigt ist.
Einen Tensor, der sich nur aus Kombinationen von Basisvektoren darstellen laßt, bezeich-net man als Fundamentaltensor. Neben dem Einheitstensor 2. Stufe kann man weitereFundamentaltensoren hohrerer Stufe definieren. Der Fundamentaltensor 3. Stufe
3
E = εijkei ⊗ ej ⊗ ek (106) eq_3_29
wird auch als Ricci-Tensor oder Permutationstensor bezeichnet. Die Tensorbasis wird indiesem Fall aus dem dyadischen Produkt von jeweils drei Basisvektoren gebildet. DasKoeffizientenschema tragt dementsprechend drei Indices und stellt somit 3 × 3 × 3 = 27unabhangige Koeffizienten dar.
εijk =
1 /ijk/ = /123/, /231/, /312/−1 /ijk/ = /213/, /132/, /321/0 sonst
(107) eq_3_30
ist das Permutationssymbol. Falls die Indices eine gerade Permutation der naturlichenReihenfolge darstellen, ist εijk = 1. Sind zwei Indices gegenuber der naturlichen Reihenfolgevertauscht, so handelt es sich um eine ungerade Permutation und der Wert ist ε = −1.Falls ein Indexwert mehrfach vorkommt, nimmt das Permutationssymbol den Wert Nullan.
44 Kontinuumsmechanik WS 16/17
Fur den Fundamentaltensor 3. Stufe gelten formal die Rechenregeln, wie sie auch fur Ten-soren 2. Stufe gelten. Wendet man den Ricci-Tensor im Sinn einer linearen Abbildung aufeinen Vektor an, so folgt
3
E ·a = εijkei ⊗ ej ⊗ ek · alel = εijk δkl al ei ⊗ ej = εijk ak ei ⊗ ej (108) eq_3_31
Durch das Skalarprodukt zwischen den beiden Basisvektoren ek und el verbleibt als ten-sorielle Basis ei ⊗ ej. Das Ergebnis ist also ein Tensor 2. Stufe. Die Koeffizienten diesesTensors entstehen aus der Verknupfung des Permutationssymbols mit den Koeffizientendes Vektors a. Man berechnet
εijk ak =
0 a3 −a2
−a3 0 a1
a2 −a1 0
(109) eq_3_32
Durch die Eigenschafen des Permutatiossymbols werden die Diagonalelemente zu Null.Zugeordnete Nebendiagonalelemente habe unterschiedichen Vorzeichen. Der Tensor, derals Ergebis der linearen Abbildung entsteht, ist demnach schiefsymmetrisch.
Neben dieses einfachen Verjungung kann man mit dem Permutationstensor auch eine zwei-fache Verfjungung durchfuhren, in dem er auf einen Tensor 2. Stufe angewandt wird. Indiesem Fall gilt
3
E : A = εijkei ⊗ ej ⊗ ek : Almel ⊗ em (110) eq_3_33
Der Doppelpunkt in diesem Ausdruck deutet an, dass zwei Skalarprodukte zwischen denBasisvektoren auszufuhren sind. In diesem Fall werden die beiden letzten Basisvektorendes Permutationstensors mit den beiden Basisvektoren des Tensors 2. Stufe multipliziert,so dass schließlich nur das erste Basissystem des Permutationstensors erhalten bleibt. DasResultat dieser Abbildung ist also ein Vektor. Die Auswertung liefert
3
E : A = εijk δjl δkmAlm ei = εijk Ajk ei. (111) eq_3_34
Die Auswertung von 111 lieft mit den Eigenschafen des Permutationssymbols
3
E : A =
A23 − A32
A31 − A13
A12 − A21
. (112) eq_3_35
Falls A symmetrisch ist, so ist das zweifach verjungende Produkt mit dem Ricci-Tensorder Nullvektor. Im Falle eines schiefsymmetrischen Tensors ist das Resultat der von Nullverschiedene axiale Vektor, der der schiefsymmetrischen Tensor zugeordnet werden kann
Aa =
1
2
3
E : AT . (113) eq_3_35a

α-Version vom 3.12.2016 45
Weiterhin kann das Produkt 111 genutzt werden, um das Vektor- oder Kreuzprodukt vonVektoren im Rahmen des Tensorkalkuls darzustellen. Dazu wird der Tensor A uber dasdyadisch Produkt der beiden Vektoren a und b definiert.
a× b :=3
E : (a⊗ b) = εijk aj bk ej =
a2b3 − a3b2
a3b1 − a1b3
a1b2 − a2b1
. (114) eq_3_36
In den Anwendungen tauchen haufig noch Tensoren 4. Stufe auf. Diese sind definiert alslineare Abbildungen von Tensoren 2. Stufe auf Tensoren 2. Stufe.
A =4
C : B = Cijkl ei ⊗ ej ⊗ ek ⊗ el : Bmn em ⊗ en =
CijklBmn δkm δln ei ⊗ ej = CijklBkl ei ⊗ ej.(115) eq_3_37
Ein vierstufiger Tensor besitzt 3 × 3 × 3 × 3 × 3 = 81 unabhangige Komponenten. Jededer neuen Komponenten des Tensors A entsteht bei der Auswertung von 115 aus einerLinearkombination der neun Komponenten von B. Die Koeffizienten berechnen sich jeweilsaus der Doppelsumme
Aij = CijklBkl. (116) eq_3_38
Es gibt drei Fundamentaltensoren 4. Stufe, die sich mittels des Kronecker-Symbols folgen-dermaßen angeben lassen
4
I = δij δkl ei ⊗ ej ⊗ ek ⊗ el = ei ⊗ ei ⊗ ek ⊗ ek,
4
I 13 = δkj δil ei ⊗ ej ⊗ ek ⊗ el = ei ⊗ ej ⊗ ej ⊗ ei,
4
I 23 = δik δjl ei ⊗ ej ⊗ ek ⊗ el = ei ⊗ ej ⊗ ei ⊗ ej.
(117) eq_3_39
Die hochgestellten und unterschrichenen Indices geben dabei an, welche Zuordnungen derKoeffizienten und der Basiselemente vertauscht ist. Die Eigenschaften dieser Fundmental-tensoren werden deutlich, wenn man sie im Sinn der linearen Abbildung auf einen Tensor2. Stufe anwendet.
• Spurbildender Tensor
4
I : A = ei ⊗ ei ⊗ ej ⊗ ej : Akl ek ⊗ el = Akl δjk δjl, ei ⊗ ei = Ajjei ⊗ ei. (118) eq_3_40
4
I : A = (tr A) I. (119) eq_3_41
• Transponierender Tensor
4
I13 : A = ei ⊗ ej ⊗ ej ⊗ ei : Akl ek ⊗ el = Akl δjk δil, ei ⊗ ej = Ajiei ⊗ ej. (120) eq_3_42
4
I13 : A = AT . (121) eq_3_43
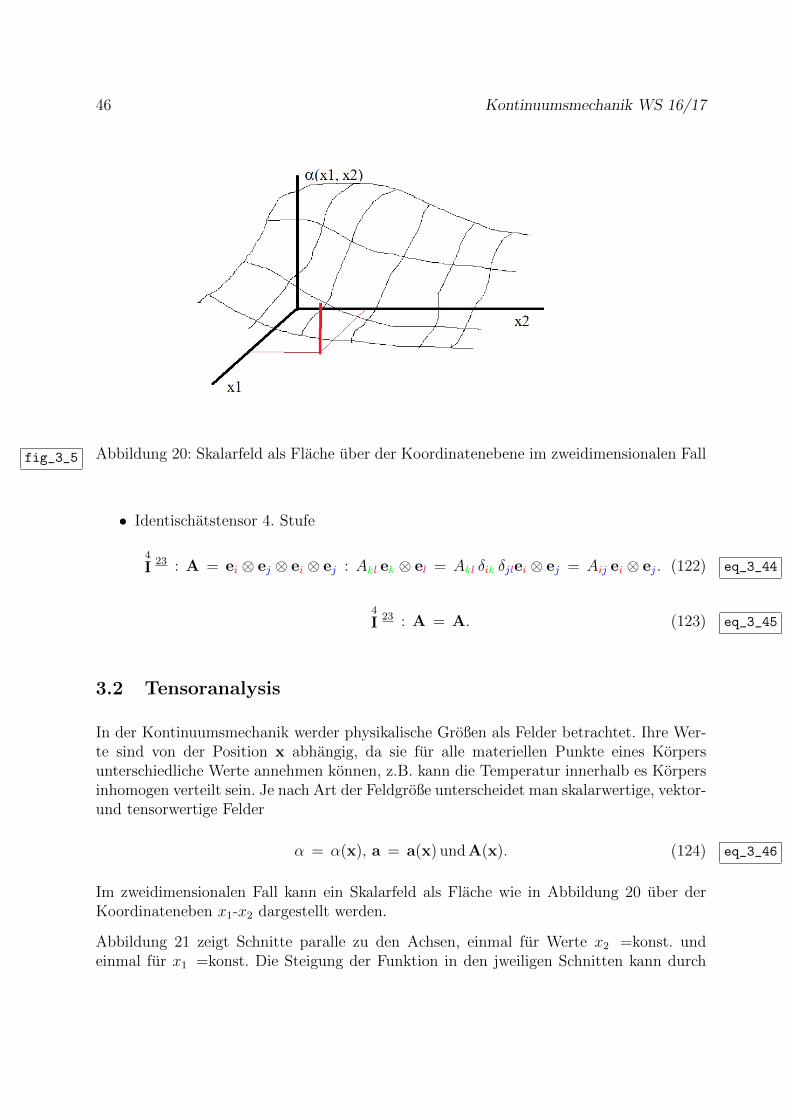
46 Kontinuumsmechanik WS 16/17
Abbildung 20: Skalarfeld als Flache uber der Koordinatenebene im zweidimensionalen Fallfig_3_5
• Identischatstensor 4. Stufe
4
I23 : A = ei ⊗ ej ⊗ ei ⊗ ej : Akl ek ⊗ el = Akl δik δjlei ⊗ ej = Aij ei ⊗ ej. (122) eq_3_44
4
I23 : A = A. (123) eq_3_45
3.2 Tensoranalysis
In der Kontinuumsmechanik werder physikalische Großen als Felder betrachtet. Ihre Wer-te sind von der Position x abhangig, da sie fur alle materiellen Punkte eines Korpersunterschiedliche Werte annehmen konnen, z.B. kann die Temperatur innerhalb es Korpersinhomogen verteilt sein. Je nach Art der Feldgroße unterscheidet man skalarwertige, vektor-und tensorwertige Felder
α = α(x), a = a(x) und A(x). (124) eq_3_46
Im zweidimensionalen Fall kann ein Skalarfeld als Flache wie in Abbildung 20 uber derKoordinateneben x1-x2 dargestellt werden.
Abbildung 21 zeigt Schnitte paralle zu den Achsen, einmal fur Werte x2 =konst. undeinmal fur x1 =konst. Die Steigung der Funktion in den jweiligen Schnitten kann durch
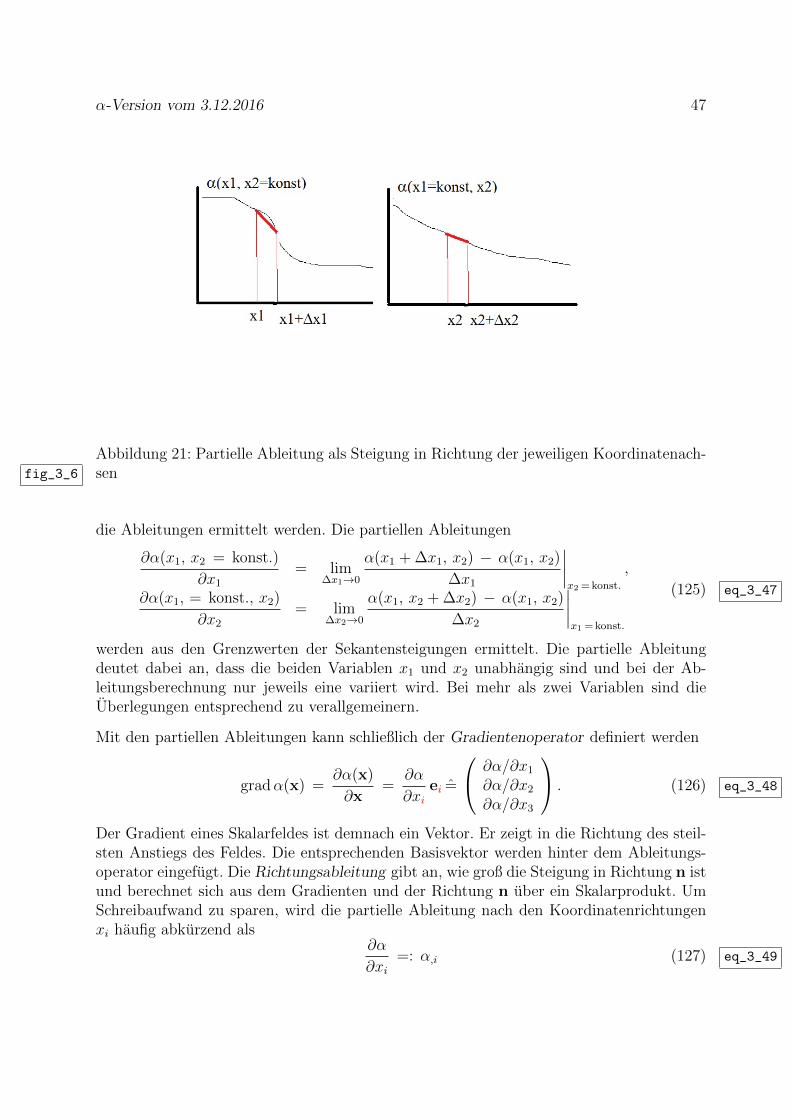
α-Version vom 3.12.2016 47
Abbildung 21: Partielle Ableitung als Steigung in Richtung der jeweiligen Koordinatenach-senfig_3_6
die Ableitungen ermittelt werden. Die partiellen Ableitungen
∂α(x1, x2 = konst.)
∂x1
= lim∆x1→0
α(x1 + ∆x1, x2) − α(x1, x2)
∆x1
∣∣∣∣x2 = konst.
,
∂α(x1, = konst., x2)
∂x2
= lim∆x2→0
α(x1, x2 + ∆x2) − α(x1, x2)
∆x2
∣∣∣∣x1 = konst.
(125) eq_3_47
werden aus den Grenzwerten der Sekantensteigungen ermittelt. Die partielle Ableitungdeutet dabei an, dass die beiden Variablen x1 und x2 unabhangig sind und bei der Ab-leitungsberechnung nur jeweils eine variiert wird. Bei mehr als zwei Variablen sind dieUberlegungen entsprechend zu verallgemeinern.
Mit den partiellen Ableitungen kann schließlich der Gradientenoperator definiert werden
gradα(x) =∂α(x)
∂x=
∂α
∂xiei =
∂α/∂x1
∂α/∂x2
∂α/∂x3
. (126) eq_3_48
Der Gradient eines Skalarfeldes ist demnach ein Vektor. Er zeigt in die Richtung des steil-sten Anstiegs des Feldes. Die entsprechenden Basisvektor werden hinter dem Ableitungs-operator eingefugt. Die Richtungsableitung gibt an, wie groß die Steigung in Richtung n istund berechnet sich aus dem Gradienten und der Richtung n uber ein Skalarprodukt. UmSchreibaufwand zu sparen, wird die partielle Ableitung nach den Koordinatenrichtungenxi haufig abkurzend als
∂α
∂xi=: α,i (127) eq_3_49
48 Kontinuumsmechanik WS 16/17
druch ein Komma und den entsprechenden Richtungsindex gekennzeichnet.
Bei der Gradientenberechnung eines Vektorfeldes a konnen alle drei Koeffizienten abgeleitetwerden. Es ergeben sich bei drei Koordinatenrichtungen wieder neun Moglichkeiten, die ineinem Tensor 2. Stufe zusammengefasst werden konnen
grad a(x) =∂a(x)
∂x=
∂ai∂xj
ei ⊗ ej = ai,j ei ⊗ ej. (128) eq_3_50
Die Basis des Ortsvektors wird wiederum hinter dem Ausdruck angefugt. Damit ein Tensorentsteht, mussen Basisvektoren des Vektorfeldes mit denen des Ortsvektor tensoriell mul-tipliziert werden. Da die Basis ei konstant ist5, betrifft bei einem kartesichen Basissystemdie Ableitungsbildung nur die Koeffizienten des Vektorfeldes und nicht die Basis.
Damit liegt die Bildungsregel fur die Gradientenbildung fest. Folgt man dem skizziertenSchema, so ist der Gradient eines Tensorfelds A als
grad A(x) =∂A
∂x=
∂Aij∂xk
ei ⊗ ej ⊗ ek = Aij,k ei ⊗ ej ⊗ ek (129) eq_3_51
definiert und ein Tensor 3. Stufe. Fasst man einen Skalar als Tensor 0. Stufe und einenVektor als Tensor 1. Stufe auf, so erhoht die Gradientenbildung die tensorielle Stufe umjeweils eins.
Die Divergenz ist ein weiterer Differentialoperator, die die partiellen Ableitungen der Feld-große nach den Koeffizienten des Ortsvektors beinhaltet. Der Zusammenhang mit demGradienten ergibt sich durch eine doppelte Verjungung des Gradienten mit dem zweistufi-gen Einheitstensor. Fur die Divergenz eines Vektorfeldes folgt dann
div a = grad a : I = ai,j ei ⊗ ej : ek ⊗ ek = ai,j δik δjk = aii. (130) eq_3_52
Schreibt man die Summe in 130 aus, so ergibt sich
div a =∂a1
∂x1
+∂a2
∂x2
+∂a3
∂x3
. (131) eq_3_53
Analog berechnet man aus der zweifachen Verjungung des dreistufigen Gradienten einerTensorfunktion mit dem zweistufigen Identitatstensor
div A = grad A : I = Aij,k ei ⊗ ej ⊗ ek : el ⊗ el = Aij,j ei. (132) eq_3_54
Die Divergenzbildung verringert also die tensorielle Stufe um eins.
Die Rotation eines Vektor- und eines Tensorfeldes lasst sich durch den Gradienten und dendreiststufigen Permutations- oder Riccitensor darstellen. Es gilt mit den oben gezeigtenRechenregeln
rota =3
E : (grad a)T bzw. rotA =3
E : (grad A)13. (133) eq_3_55
5Falls keine kartesische Basis verwendet wird, sondern die Bais ortsabhangig ist, muss bei der Bildungder Ableitungen diese Abhangigkeit ebenfalls berucksichtigt werden. Dabei entstehen dann die Christof-felsymbole, die genau diese Abhangigkeiten widerspiegeln.
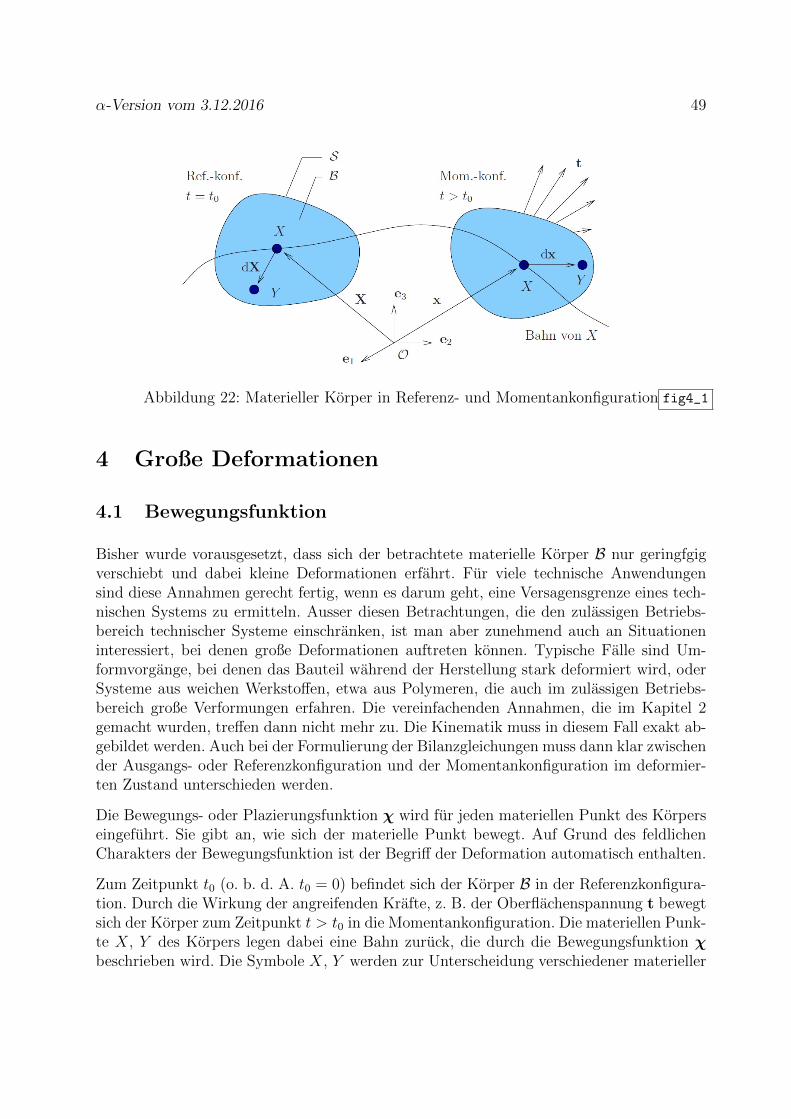
α-Version vom 3.12.2016 49
Abbildung 22: Materieller Korper in Referenz- und Momentankonfiguration fig4_1
4 Große Deformationen
4.1 Bewegungsfunktion
Bisher wurde vorausgesetzt, dass sich der betrachtete materielle Korper B nur geringfgigverschiebt und dabei kleine Deformationen erfahrt. Fur viele technische Anwendungensind diese Annahmen gerecht fertig, wenn es darum geht, eine Versagensgrenze eines tech-nischen Systems zu ermitteln. Ausser diesen Betrachtungen, die den zulassigen Betriebs-bereich technischer Systeme einschranken, ist man aber zunehmend auch an Situationeninteressiert, bei denen große Deformationen auftreten konnen. Typische Falle sind Um-formvorgange, bei denen das Bauteil wahrend der Herstellung stark deformiert wird, oderSysteme aus weichen Werkstoffen, etwa aus Polymeren, die auch im zulassigen Betriebs-bereich große Verformungen erfahren. Die vereinfachenden Annahmen, die im Kapitel 2gemacht wurden, treffen dann nicht mehr zu. Die Kinematik muss in diesem Fall exakt ab-gebildet werden. Auch bei der Formulierung der Bilanzgleichungen muss dann klar zwischender Ausgangs- oder Referenzkonfiguration und der Momentankonfiguration im deformier-ten Zustand unterschieden werden.
Die Bewegungs- oder Plazierungsfunktion χ wird fur jeden materiellen Punkt des Korperseingefuhrt. Sie gibt an, wie sich der materielle Punkt bewegt. Auf Grund des feldlichenCharakters der Bewegungsfunktion ist der Begriff der Deformation automatisch enthalten.
Zum Zeitpunkt t0 (o. b. d. A. t0 = 0) befindet sich der Korper B in der Referenzkonfigura-tion. Durch die Wirkung der angreifenden Krafte, z. B. der Oberflachenspannung t bewegtsich der Korper zum Zeitpunkt t > t0 in die Momentankonfiguration. Die materiellen Punk-te X, Y des Korpers legen dabei eine Bahn zuruck, die durch die Bewegungsfunktion χbeschrieben wird. Die Symbole X, Y werden zur Unterscheidung verschiedener materieller

50 Kontinuumsmechanik WS 16/17
Punkte des Korpers eingefuhrt und konnen als”Namen“ der Punkte betrachtet werden.
Die Lage des materiellen Punktes X in der Referenzkonfiguration wird durch den Vek-tor X gekennzeichnet, die Lage in der Momentankonfiguration durch den Vektor x. Furdie mathematische Modellierung wird der materielle Punkt X mit seinem Ortsvektor Xzum Zeitpunkt t0 ein-eindeutig identifiziert, d. h. ein materieller Punkt nimmt genau einenmathematischen Punkt in der Referenzkonfiguration des Korpers ein und an einem mathe-matischen Punkt liegt genau ein materieller Punkt.
Mit der Bewegungsfunktion gilt dann
x = χ(X, t), (134) kinem10
d. h. die Bewegungsfunktion χ bildet den Ortsvektor der Referenzkonfiguration in denOrtsvektor der Momentankonfiguration ab. Analog gilt fur einen zweiten materiellen PunktY
y = χ(Y, t). (135) kinem20
Zum Zeitpunkt t0 muss die Bewegungsfunktion die Bedingung
X = χ(X, t0) (136) kinem30
erfullen, damit die Bewegung von X aus seiner Anfangsposition X heraus startet. Da einRaumpunkt x nur von einem materiellen Punkt X besetzt werden kann und der materiellePunkt aus einer eindeutig definierten Referenzkonfiguration gestartet ist, ist die Bewe-gungsfunktion eindeutig und eindeutig invertierbar, also ein-eindeutig. Es existiert als eineinverse Bewegungsfunktion
X = χ−1(x, t) (137) kinem40
mit deren Hilfe man ermitteln kann, von welcher Position aus der materielle Punkt X, derzur Zeit t an der raumlichen Position x ist, seine Bewegung begonnen hat.
In der Kontinuumsmechanik unterscheidet man zwei mogliche Darstellungen, die auf un-terschiedlichen Parameterisierungen der Felder fußen:Lagrangesche (materielle) Darstellung
Der materielle PunktX wird durch den Ortsvektor X der Referenzkonfigurationidentifiziert. Die Bewegungsfunktion
x = χ(X, t) (138) kinem50
liefert die Antwort auf die Frage: Wo befindet sich der materielle Punkt X,der zum Anfangszeitpunkt t0 am Raumpunkt X war, zum Zeitpunkt t? In derLagrangeschen Darstellungen werden die Felder in Abhangigkeit von X pa-rameterisiert. Die Anwendung findet ublicherweise in der Festkorpermechanikstatt.

α-Version vom 3.12.2016 51
Eulersche (raumliche) Darstellung
Der materielle Punkt X wird durch den Ortsvektor x der Momentankonfigura-tion identifiziert. Die inverse Bewegungsfunktion
X = χ−1(x, t) (139) kinem60
liefert die Antwort auf die Frage:Wo war der materielle Punkt X, der zurZeit t den Raumpunkt x einnimmt, zum Anfangszeitpunkt t0? Die feldlichenGrossen werden in Abhangigkeit von x parameterisiert. Die Anwendung ist inder Stromungsmechanik ublich, da es hier keine ausgezeichnet Referenzkonfi-guration gibt.
Aus mathematischer Sicht ist die Bewegungsfunktion ein-eindeutig (eindeutig und eindeu-tig invertierbar), wenn die Jacobi-Determinante J immer ungleich Null ist, d. h.
J = det∂x
∂X6= 0 (140) kinem70
Eine weitere physikalische Interpretation der Beziehung 140 wird noch gegeben.
Neben dem materiellen Korper und den materiellen Punkten, die bereits im Kapitel 2eingefuhr wurden, kann man auch materielle Linien, materielle Flachen und materielleVolumen definieren. Eine materielle Linie ist dabei definiert als Verbindungslinie infinite-simal benachbarter materieller Punkte. Eine materielle Linie wird immer von den selbenmateriellen Punkten gebildet und bewegt sich mit diesen materiellen Punkten mit.
Ein materielles Linienelement ist der Verbindungsvektor zwischen zwei infinitesimal be-nachbarten materiellen Punkten X und Y , die auf einer materiellen Linie liegen. Be-trachtet man den Verbindungsvektor der materiellen Punkte in der Referenzkonfiguration∆X = Y − X bzw. in der Momentankonfiguration ∆x = y − x, so kann man die Punk-te im Grenzwert gegeneinander wandern lassen. Die Differenzvektoren ∆X und ∆x gehendann in die materiellen Linienelemente dX bzw. dX uber, die differentialgeometrisch alsTangentenvektoren an die materielle Linie interpretierbar sind.
4.2 Geschwindigkeit und Beschleunigung
Geanu wie fur den Massepunkte ergeben sich Geschwindigkeit und Beschleunigung aus derAbleitung der Position eines materiellen Punktes nach der Zeit, d. h. aus Ableitung derBewegungsfunktion:
x(X, t) =dx(X, t)
dt,
x(X, t) =d2x(X, t)
dt.
(141) kinem360
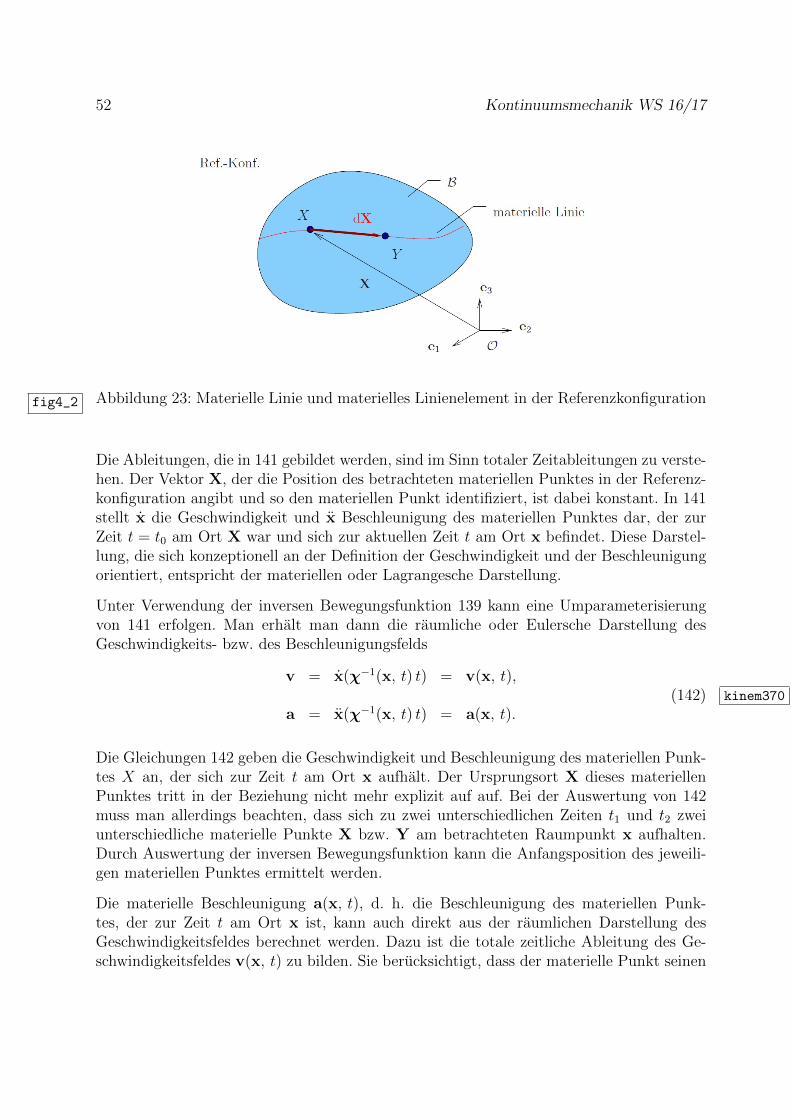
52 Kontinuumsmechanik WS 16/17
Abbildung 23: Materielle Linie und materielles Linienelement in der Referenzkonfigurationfig4_2
Die Ableitungen, die in 141 gebildet werden, sind im Sinn totaler Zeitableitungen zu verste-hen. Der Vektor X, der die Position des betrachteten materiellen Punktes in der Referenz-konfiguration angibt und so den materiellen Punkt identifiziert, ist dabei konstant. In 141stellt x die Geschwindigkeit und x Beschleunigung des materiellen Punktes dar, der zurZeit t = t0 am Ort X war und sich zur aktuellen Zeit t am Ort x befindet. Diese Darstel-lung, die sich konzeptionell an der Definition der Geschwindigkeit und der Beschleunigungorientiert, entspricht der materiellen oder Lagrangesche Darstellung.
Unter Verwendung der inversen Bewegungsfunktion 139 kann eine Umparameterisierungvon 141 erfolgen. Man erhalt man dann die raumliche oder Eulersche Darstellung desGeschwindigkeits- bzw. des Beschleunigungsfelds
v = x(χ−1(x, t) t) = v(x, t),
a = x(χ−1(x, t) t) = a(x, t).(142) kinem370
Die Gleichungen 142 geben die Geschwindigkeit und Beschleunigung des materiellen Punk-tes X an, der sich zur Zeit t am Ort x aufhalt. Der Ursprungsort X dieses materiellenPunktes tritt in der Beziehung nicht mehr explizit auf auf. Bei der Auswertung von 142muss man allerdings beachten, dass sich zu zwei unterschiedlichen Zeiten t1 und t2 zweiunterschiedliche materielle Punkte X bzw. Y am betrachteten Raumpunkt x aufhalten.Durch Auswertung der inversen Bewegungsfunktion kann die Anfangsposition des jeweili-gen materiellen Punktes ermittelt werden.
Die materielle Beschleunigung a(x, t), d. h. die Beschleunigung des materiellen Punk-tes, der zur Zeit t am Ort x ist, kann auch direkt aus der raumlichen Darstellung desGeschwindigkeitsfeldes berechnet werden. Dazu ist die totale zeitliche Ableitung des Ge-schwindigkeitsfeldes v(x, t) zu bilden. Sie berucksichtigt, dass der materielle Punkt seinen
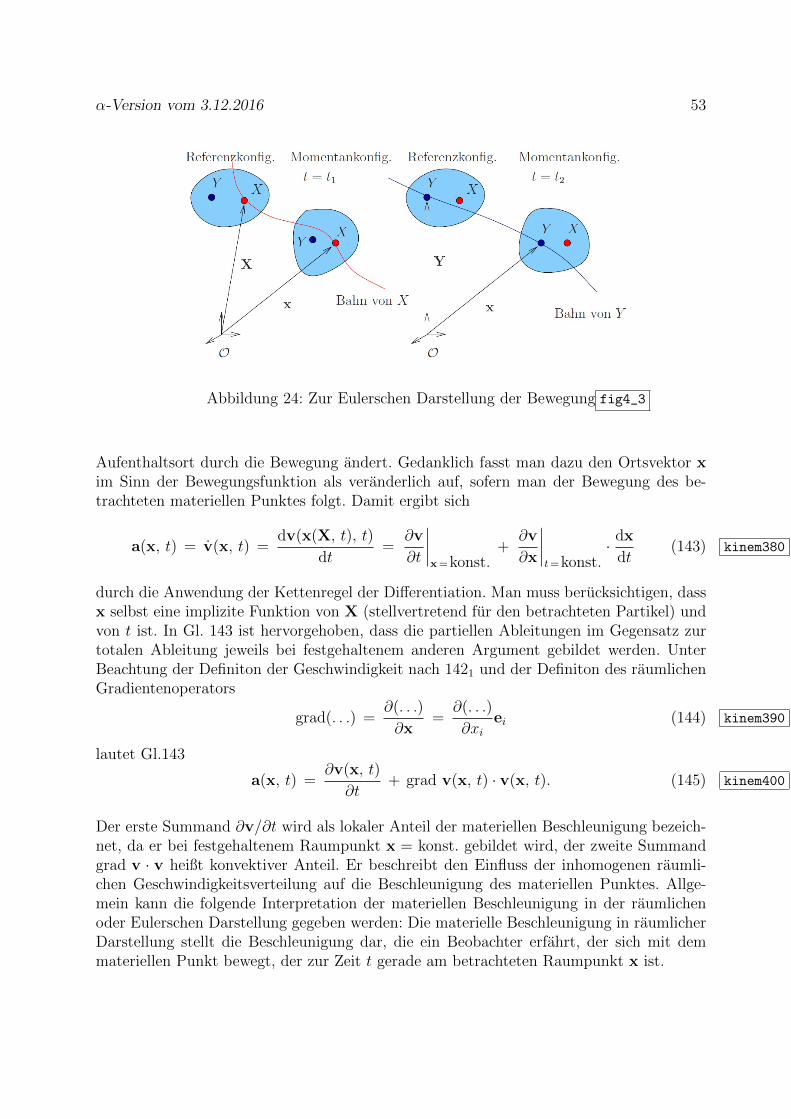
α-Version vom 3.12.2016 53
Abbildung 24: Zur Eulerschen Darstellung der Bewegung fig4_3
Aufenthaltsort durch die Bewegung andert. Gedanklich fasst man dazu den Ortsvektor xim Sinn der Bewegungsfunktion als veranderlich auf, sofern man der Bewegung des be-trachteten materiellen Punktes folgt. Damit ergibt sich
a(x, t) = v(x, t) =dv(x(X, t), t)
dt=
∂v
∂t
∣∣∣∣x= konst.
+∂v
∂x
∣∣∣∣t= konst.
· dx
dt(143) kinem380
durch die Anwendung der Kettenregel der Differentiation. Man muss berucksichtigen, dassx selbst eine implizite Funktion von X (stellvertretend fur den betrachteten Partikel) undvon t ist. In Gl. 143 ist hervorgehoben, dass die partiellen Ableitungen im Gegensatz zurtotalen Ableitung jeweils bei festgehaltenem anderen Argument gebildet werden. UnterBeachtung der Definiton der Geschwindigkeit nach 1421 und der Definiton des raumlichenGradientenoperators
grad(. . .) =∂(. . .)
∂x=
∂(. . .)
∂xiei (144) kinem390
lautet Gl.143
a(x, t) =∂v(x, t)
∂t+ grad v(x, t) · v(x, t). (145) kinem400
Der erste Summand ∂v/∂t wird als lokaler Anteil der materiellen Beschleunigung bezeich-net, da er bei festgehaltenem Raumpunkt x = konst. gebildet wird, der zweite Summandgrad v · v heißt konvektiver Anteil. Er beschreibt den Einfluss der inhomogenen raumli-chen Geschwindigkeitsverteilung auf die Beschleunigung des materiellen Punktes. Allge-mein kann die folgende Interpretation der materiellen Beschleunigung in der raumlichenoder Eulerschen Darstellung gegeben werden: Die materielle Beschleunigung in raumlicherDarstellung stellt die Beschleunigung dar, die ein Beobachter erfahrt, der sich mit demmateriellen Punkt bewegt, der zur Zeit t gerade am betrachteten Raumpunkt x ist.

54 Kontinuumsmechanik WS 16/17
4.3 Materielle Zeitableitung
Das am Beispiel der materiellen Beschleunigung entwickelte Konzept der materiellen Zeita-bleitung laßt sich auf beliebige Feldfunktionen ubertragen. Dabei sind Feldfunktionenf(x, t) definiert als Funktionen des Orts x und der Zeit t, d. h. die Parameterisierung er-folgt im Sinn der Eulerschen oder der raumlichen Darstellung. Die zeitlichen Anderungender Feldfunktionen, die gesucht werden, sind jedoch Anderungen, die sich fur die bewegteMaterie einstellen. Das fuhrt zu der folgenden Definition: Die materielle Zeitableitung ei-ner Feldfunktion f(x, t) stellt dann die zeitliche Anderung von f dar, die ein Beobachtermessen wurde, der sich mit dem materiellen Punkt bewegt, der zur Zeit t gerade am Ortx ist. Mathematisch entspricht die materielle Zeitableitung der totalen Zeitableitung.
Die materielle Zeitableitgung
f(x, t) =df(x, t)
dt, (146) kinem410
berucksichtigt, dass der materielle Punkt wahrend der Beobachtung seinen Aufenthaltsortandert, d. h. man beachtet die implizite Abhangigkeit x = x(X, t) bei der Bildung dertotalen Zeitableitung. Dann folgt
f(x, t) =∂f
∂t+ grad f · v. (147)
kinem420 Der lokale Anteil ∂f/∂t beschreibt wiederum die Anderung von f an dem fest-gehaltenen Ort x, der konvektive Anteil grad f · v beschreibt die Anderung von f infolgeder Bewegung des materiellen Punktes durch das raumlich inhomogene Feld.
Ein Vorgang heißt stationar, wenn die lokale Zeitableitung identisch Null ist. Ein Beobach-ter stellt also an einem Raumpunkt immer den selben Zustand fest, obwohl zu unterschied-lichen Zeiten verschiedene materielle Punkte an diesem Raumpunkt anzutreffen sind. DerZustand heißt materiell konstant, wenn die materielle Zeitableitung identisch Null ist. Indiesem Fall andern sich die Zustandsgroßen eines materiellen Punktes nicht, auch wenn ersich durch den Raum bewegt. Ein Feld heißt homogen, wenn der Gradient identisch Nullist.
In einem stationaren Prozeß sind die Werte von f an einem festen Raumpunkt x immergleich, es gilt ∂f/∂t = 0. Wenn das Feld inhomogen ist, d. h. grad f 6= 0, dann istdie materielle Zeitableitung in diesem Fall trotzdem von Null verschieden, da sich diemateriellen Punkte von einem Ort zum anderen bewegen und dabei die raumliche Anderunggrad f mit der Geschwindigkeit v verspuren.
4.4 Transport materieller Linien, Flachen, Volumen
Die materielle Linie wurde bereits als Verbindungslinie infinitesimal benachbarter materi-eller Punkte eingefuhrt. Die materielle Linie haftet an den materiellen Punkten, aus denen

α-Version vom 3.12.2016 55
Abbildung 25: Bewegung materieller Linienelemente fig4_4
sie gebildet wird und bewegt sich mit diesen Punkten mit. Sie wird also zu allen Zeitpunk-ten aus den selben materiellen Punkten gebildet. Ein materielles Linienelement ist derVerbindungsvektor zwischen zwei infinitesimal benachbarten materiellen Punkten. Dies istinterpretierbar als Tangentenvektor an die materielle Linie, die durch die beiden Punkteverlauft. Genau wie die gesamte materielle Linie bewegt sich ein materielles Linienelementmit dem Korper mit. Wenn man in der Lage ist, ein materielles Linienelement wahrend derBewegung des Korpers zu verfolgen, kann man diese Information nutzen, um Deformationdes materiellen Korpers zu bestimmen.
Wenn ein materielles Linienelement dX in der Referenzkonfiguration betrachtet wird, kannman mit Hilfe der Bewegungsfunktion sein Bild dX in der aktuellen Konfiguration finden.Der Differenzvektor zwischen den benachbarten Punkten X und Y ist in der Referenzkon-figuration gegeben als
∆X = Y − X. (148) kinem590
In der Momentankonfiguration ist der Verbindungsvektor zwischen den beiden betrachtetenPunkten durch
∆x = y − x = χ(Y, t) − χ(X, t) (149) kinem600
gegeben und kann mit der Bewegungsfunktion χ bestimmt werden. Geht man davon aus,dass die Punkte in direkter Nachbarschaft liegen, so kann man die Bewegungsfunktion ineine Taylor-Reihe eintwickeln. Fur die aktuelle Position des materiellen Punkts Y folgtdamit
χ(Y, t) = χ(X, t) +∂χ(X, t)
∂X· (Y − X) + hohere Terme. (150) kinem610
Unter Vernachlassigung der hoheren Terme der Taylor-Reihe in dem Differenzvektor ∆Xkann man die Gleichungen 148, 149 und 150 kombinieren und erhalt
∆x =∂χ(X, t)
∂X·∆X. (151) kinem620

56 Kontinuumsmechanik WS 16/17
Fur direkt benachbarte materielle Punkte gehen die Differenzvektoren ∆X und ∆x in dieentsprechenden materiellen Linienelemente dX und dX uber, wenn man den Abstand derbeiden Punkte als infinitesimal klein annimmt. Im Grenzwert folgt daher
dX = Grad χ(X, t) · dX = F · dX. (152) kinem630
Diese Gleichung definiert den Deformationsgradienten
F = Grad χ(X, t) =∂x
∂X. (153) kinem640
Der Deformationsgradient F bildet also die Linienelemente dX der Referenzkonfigurationauf die Linienelemente dX der Momentankonfiguration ab. In 153 wird der Werr der Be-wegungsfunktion x so behandelt wie die Bewegungsfunktion χ selbst. Diese vereinfachen-de Darstellung ist mathematisch nicht korrekt, da nur die Funktion aber nicht ihr Wertabgeleitet werden kann. Allerdings besteht in dem meisten Situationen keine Verwechse-lungsgefahr und es ist klar, was an der entsprechenden Stelle mit der Ableitung gemeintist, so dass sich die vereinfachte Form 1532 an vielen Stellen in der Literatur eingeburgerthat.
χ Der in Gl. 153 auftretende materielle Gradientenoperator entspricht der partiellen Ab-leitung nach den Ortsvektoren der Referenzkonfiguration
Grad(. . .) =∂(. . .)
∂X=
∂(. . .)
∂Xi
ei =
∂(. . .)
∂X1
∂(. . .)
∂X2
∂(. . .)
∂X3
(154) kinem640a
In karesischen Koordinaten ergibt sich die folgende Darstellung des Deformationsgradienten
F =
∂x1(X1, X2, X3, t)
∂X1
∂x1(X1, X2, X3, t)
∂X2
∂x1(X1, X2, X3, t)
∂X3
∂x2(X2, X2, X3, t)
∂X1
∂x2(X2, X2, X3, t)
∂X2
∂x2(X3, X2, X3, t)
∂X3
∂x3(X1, X2, X3, t)
∂X1
∂x3(X1, X2, X3, t)
∂X2
∂x3(X1, X2, X3, t)
∂X3
. (155) kinem640b
Analog kann man eine Beziehung fur die materiellen Volumenelementen ermitteln. Diesesind durch das Spatprodukt von jeweils drei nicht-kolinearen materiellen Linienelementendefiniert
dV = (dX1 × dX2) · dX3, dv = (dx1 × dx2) · dx3. (156) kinem730

α-Version vom 3.12.2016 57
Unter Ausnutzung des Transporttheorems 152 schreibt man
dv =(
(F · dX1)× (F ·X2))· (F · dX3). (157) kinem740
Mit der Berechnungsmoglichkeit fur die Determinant gilt fur Tensoren A und fur beliebigeVektoren a, b und c
((A · a)× (A · b)) · (A · c) = (det A)(a× b) · c. (158) kinem740a
Wahlt man A = F und identifiziert die Vektoren a, b und c mit drei nicht-kolinearenmateriellen Linienelementen, so kann Gl. 158 umformuliert werden zu
det F =
((F · dX1)×(F · dX2) · (F · dX3)
)(dX1 × dX2) · dX3
=(dx1 × dx2) · dx3
(dX1 × dX2) · dX3
. (159) kinem750
Es folgt schließlich mit Gleichung 156
dv = (det F) dV. (160) kinem760
Ein materielles Flachenelement ergibt sich aus dem Kreuzprodukt von zwei nicht-parallelenmateriellen Linienelementen dX1 und dX2 bzw. dX1 und dX2. In der Referenzkonfigurationgilt
dA = dX1 × dX2 (161) kinem650
und in der Momentankonfiguration
da = dX1 × dX2. (162) kinem660
Mit der Vorschrift fur den Transport von Linienelementen 152 kann die Beziehung 162durch die Elemente der Referenzkonfiguration ausgedruckt werden
da = (F · dX1)× (F · dX2) (163) kinem670
Um den Zusammenhang zwischen den Flachenelementen dA der Referenz- und da derMomentankonfiguration herzuleiten, betrachtet man die Gleichung 158 fur fest gewahlteVektoren a und b, fur beliebige Vektoren c, die nicht in der Ebene von a und b liegen, undfur beliebige Tensoren A. Mit der Beliebigkeit von c folgt dann
AT · ((A · a)× (A · b)) = (det A)(a× b). (164) kinem720a
Mit der Identifikation der Vektoren gemaß 161 und 163 ergibt sich
da = (det F) FT−1 dA. (165) kinem720

58 Kontinuumsmechanik WS 16/17
Da es sich bei den Großen dTA und dTA um die gerichteten Flachenelemente dAN unddan handelt, kann 165 auch als Transporttheorem fur die Normalenvektoren N und n aufmateriellen Flachen interpretiert werden.
ZusammenfassungDie folgenden kinematischen Zusammenhange ergeben sich zwischen materiellen Linien-,Flachen- und Volumenelementen der Referenz- und der Momentankonfiguration:
dX = F · dX,
dTA = (det F) FT−1 · dTA,
dV = (det F) dV.
(166) kinem770
Diese Großen bilden die Basis zur Definition von Verzerrungstensoren im Rahmen einerTheorie großer Deformationen.
4.5 Deformations- und Verzerrungstensoren
Der Deformationsgradient F(X, t) ist zur Beschreibung der Deformation eines materiellenKorpers nicht geeignet, da der Deformationsgradiente auch fur eine StarrkorperbewegungWerte ungleich der Identitat annimmt. Materielle Linienelemente verandern per Definiti-on bei einer Starrkorperbewegung ihren Abstand nicht, aber die Orientierung andert sichdurch die Rotation. Um Deformationen auf Grund der Bewegung von den Starrkorperan-teilen zu trennen, werden die Langenanderungen materieller Linienelemente betrachtet.
Man nutzt dazu das Quadrat der Lange eines Linienelementes in der Referenz- und derMomentankonfiguration als
dS2 = dX · dX, ds2 = dx · dx. (167) kinem920
Die beiden Großen dS und ds lassen sich durch Anwendung des Transporttheorems furLinienelemente 1661 ineinander uberfuhren. Fur das Quadrat der Lange in der aktuellenKonfiguration gilt
ds2 = dX · dX = (F · dX) · (F · dX) = dX · (FT · F) · dX =: dX ·C · dX. (168) kinem930
Dabei wird das Quadrat ds der Linienelemente der Momentankonfiguration durch die Li-nienelemente der Referenzkonfiguration ausgedruckt. Der Ausdruck 168 definiert den denrechten Cauchy-Green-Deformationstensor C als
C := FT · F (169) kinem940
Der rechte Cauchy-Green-Deformationstensor ist symmetrisch
CT = (F · FT )T = FT · (FT )T = FT · F = C. (170) kinem950

α-Version vom 3.12.2016 59
Da C in der Gleichung 168 auf Linienelemente der Referenzkonfiguration angewandt wird,bezieht sich C auf die Geometrie der Referenzkonfiguration. d. h. die Bezugsgroße fur dieBeschreibung der Deformation sind die Ausgangslinienelemente dX.
Druckt man analog das Quadrat der Linienelemente der Referenzkonfiguration durch dieLinienelemente der Momentankonfiguration aus, so entsteht der linke Cauchy-Green-Defor-mationstensor
dS2 = dX · dX = (F−1 · dX) · (F−1 · dX) = dX ·B−1 · dX (171) kinem970
mit der Definition
B = F · FT → B−1 = FT−1 · F−1. (172) kinem980
B ist ebenfalls symmetrisch und bezieht sich auf die Geometrie der aktuellen Konfiguration,da B in Gleichung 171 auf Lininenelemente der aktuellen Konfiguration angewandt wird.
Da die Definition der Deformationstensoren von dem Quadrat der Linienelemente ausgeht,ist keine Orientierungsinformation enthalten. Somit beinhalten die Deformationstensorennur noch Information uber die Langenanderung der Linienelemente, nicht aber uber dieDrehung, die die Linienelemente von der Referenz- in die Momentankonfiguration erfahrenhaben.
Im undeformierten Zustand oder im Fall einer Strarrkorperbewegung ist F = I. Dannnehmen die Deformationstensoren C und B ebenfalls den Wert I an. Da man es gewohntist, sich bei der Angabe der Deformation auf die Ausgangsgroße zu beziehen, fuhrt manim weiteren Verzerrungstensoren ein, die sich aus der Differenz der Quadrate der Lini-enelemente in den beiden Konfigurationen ergeben. Die entsprechenden Anfangswerte imundeformierten Zustand sind dann Null. Man betrachtet dazu die Differenz
ds2 − dS2 = dX · dX − dX · dX (173) kinem1000
und druckt entweder die Linienelemente der Referenzkonfiguration durch die der Momen-tankonfiguration aus oder andersherum. Im ersten Fall erhalt man
ds2 − dS2 = dX · (C − I) · dX. (174) kinem1010
Analog ergibt sich im zweiten Fall
ds2 − dS2 = dX · (I − B−1) · dX. (175) kinem1020
Uber die Beziehung 174 wird der Green-Lagrangesche Verzerrungstensor (auch nur alsGreenscher Verzerrungstensor bezeichtnet) definiert als
ds2 − dS2 = dX · 2 E · dX → E :=1
2(C − I). (176) kinem1030
60 Kontinuumsmechanik WS 16/17
Der Faktor 1/2 in der Definition von E ist Konvention. Er wird eingefuhrt, damit dielinearisierte Variante des Greenschen Verzerrungstensors mit den klassischen Ingenieur-dehnungen εεε ubereinstimmt. E ist wie C ein Tensor der Referenzkonfiguration. Analogdefiniert sich der Euler-Almansi-Verzerrungstensor
A =1
2(I − B−1). (177) kinem1040
Er stellt im Gegensatz zum Lagrangeschen Verzerrungstensor einen Tensor der Momen-tankonfiguration dar.
Die beiden eingefuhrten Verzerrungstensoren E und A lassen sich durch push forward bzw.durch pull back in einander transformieren. Der Transport einer tensoriellen Große derReferenzkonfiguration in eine Große der Momentankonfiguration wird dabei als Vorwart-stransport (engl. push forward) bezeichnet, der Transport einer Große der Momentankon-figuration zuruck in die Referenzkonfiguration als Ruckwartstransport (engl. pull back).Vergleicht man die Definitionen der beiden Verzerrungstensoren 176 und 177 miteinan-der, so sieht man, dass aus diesen Definitionen die Regeln fur die Transportorperationenableitbar sind. Es ergibt sich
E = FT ·A · F (pull back),
A = FT−1 · E · F−1 (push forward).(178) kinem1050
4.6 Darstellung mittels Verschiebungsgradient
Die Verschiebung u eines materiellen Punktes ist der Differenzvektor zwischen den Orts-vektoren der Referenz- und der Momentankonfiguration:
u = x − X. (179)
kinem1060 Als zentrale Große wurde die Verschiebung bereits in Gleichung 3 bzw. in Ab-bildung 4 eingefuhrt. Die Bewegungsfunktion kann eindeutig uber den Verschiebungsvektordargestellt werden. Umstellen von ?? liefert
x = χ(X, t) = X + u(X, t). (180) kinem1060a
Mit der Vektoridentitat
Grad X =∂X
∂X= I (181) kinem1070
und dem Verschiebungsvektor gemaß ?? kann der Deformationsgradient
F =∂(X + u)
∂X= I + Grad u (182) kinem1080

α-Version vom 3.12.2016 61
aus dem Verschiebungsgradienten Grad u berechnet werden. Fur den inversen Deformati-onsgradienten findet man die Darstellung
F−1 =∂X
∂x=
∂(x − u)
∂x= I − grad u. (183) kinem1090
Dabei wurde der Gradient bzgl. des Ortsvektors x in der Momentankonfiguration eingefuhrt
grad(. . .) =∂(. . .)
∂x=
∂(. . .)
∂xiei. (184) kinem1090a
Die beiden Gradientenoperatoren Grad(. . .) und grad(. . .) konnen in einander uberfuhrtwerden, wenn man den Zusammenhang zwischen den Ortsvektoren X der Referenz- und denOrtsvektoren x der Momentankonfiguration durch die Bewegungsfunktion berucksichtigt.Unter Anwendung der Kettenregel gilt dann
Grad(. . .) =∂(. . .)
∂X=
∂(. . .)
∂x
∂x
∂X= grad(. . .) F. (185) kinem1090b
Die zwei Beziehungen 182 und 183, in denen der Deformationsgradient durch die materi-ellen bzw. raumlichen Verschiebungsgradienten ausgedruckt wird, konnen genutzt werden,um die Verzerrungstensoren E und A durch die Verschiebungsgradienten Grad u der Refe-renzkonfiguration oder grad u der Momentankonfiguration auszudrucken. Man findet durchEinsetzen
E = 12(FT · F − I) = 1
2(Grad u + GradT u + GradT u ·Grad u),
A = 12(I − FT−1 · F−1) = 1
2(grad u + gradT u + gradT u · grad u).
(186) kinem1100
Diese Darstellungen zeigen nochmals deutlich, dass sich der Green-Lagrangesche Verzer-rungstensor E auf die Referenzkonfiguration und der Euler-Almansische VerzerrungstensorA auf die Momentankonfiguration bezieht, da die jeweiligen Verschiebungsableitungen bzgl.X oder x gebildet werden. Die Verzerrungstensoren der Theorie großer Deformationen un-terscheiden sich von der Ingenieurverzerrung εεε der geometrisch linearen Theorie durch diequadratischen Anteile in den Verschiebungsgradienten.
4.7 Geschwindigkeitsgradient
Wahrend die Verzerrungstensoren zur Darstellung elastischen Materialverhaltens genutztwerden, benotigt man zur Beschreibung viskosen Verhaltens die Verzerrungsraten. Diegrundlegende kinematische Große, mit der die Verzerrungsraten berechnet werden konnen,ist der Geschwindigkeitsgradient. Um den Geschwindigkeitsgradienten einzufuhren, be-trachtet man die Rate, mit der sich ein Linienelement verandert.
62 Kontinuumsmechanik WS 16/17
Die Anderungsgeschwindigkeit von Linienelementen ergibt sich aus der materiellen Zeit-ableitung von 152
d(dx)
dt=
d
dt(F · dX). (187) kinem1290
Da das materielle Linienelemente dX in der Referenzkonfiguration zu einem festen Zeit-punkt t0 ausgewahlt werden, ist es zeitlich konstant, d(dX)/dt = 0. Damit ergibt sichunter Beachtung der Produktregel der Differentiation
d(dx)
dt= F · dX. (188) kinem1300
Berucksichtigt man weiterhin den Zusammenhang v = x zwischen dem Ortsvektor und derGeschwindigkeit eines materiellen Punktes sowie die Definition des Deformationsgradienten153, so findet man die Darstellung
F =∂v
∂X= Grad v (189) kinem1310
fur den materiellen Geschwindigkeitsgradienten. Dabei wird vorausgesetzt, dass die mate-rielle Zeitableitung d(. . .)/dt und die Ableitung nach den Ortsvektoren X der Referenz-konfiguration vertauschbar sind, da t und X von einander unabhangig sind.
Der raumliche Geschwindigkeitsgradient entsteht, wenn man auf der rechten Seite von293 das Linienelement der Referenzkonfiguration mittels 152 durch das Linienelement deraktuellen Konfiguration ausdruckt:
dx
dt= F ·
[F−1 · dX
]= L · dx. (190) kinem1320
Damit ist der raumliche Geschwindigkeitsgradient als
L := F · F−1 (191) kinem1330
definiert. Er bestimmt die Anderungsgeschwindigkeit eines Linienelements als lineare Funk-tion des Linienelements selbst. Faßt man 296 als Vorwartstransport (push forward) desmateriellen Geschwindigkeitsgradienten 294 auf oder als eine Darstellung der Kettenregelder Differentiation analog zu 185, so gelangt man zu der Darstellung
L = grad v. (192) kinem1340
Dabei ist zu beachten, dass v als Funktion des raumlichen Ortsvektors x gegeben sein muss,um diese Beziehung auszuwerten. Die materielle Darstellung kann jedoch durch Einset-zen der inversen Bewegungsfunktion jederzeit in die entsprechende raumliche Darstellungtransformiert werden. Es gilt
v(X, t) = v(χ−1(x, t)︸ ︷︷ ︸=X
, t) = v(x t). (193) kinem1340a

α-Version vom 3.12.2016 63
Formal muss zwischen den Funktionen v und v unterschieden werden. Da jedoch die Pa-rameterisierung durch den jeweiligen Zusammenhang deutlich wird und in der Regel keineVerwechselungsgefahr besteht, verzichtet man meist auf die Verwendung von zwei verschie-denen Symbolen.
An manchen Stellen benotigt man fur die Herleitungen auch die Zeitableitung des inversenDeformationsgradienten F−1. Da Zeitableitung und Invertierung nicht vertauscht werdendurfen, geht man zur Berechnung von der folgenden Identitat aus
F · F−1 = I. (194) kinem1560
Durch Bildung der materiellen Zeitableitung erhalt man einen Ausdruck fur die Ableitungdes inversen Deformationsgradienten
d
dt(F · F−1) = 0 ⇒ d(F−1)
dt= −F−1 · F · F−1 = −F−1L. (195) kinem1570
Ublicherweise wird der raumliche Geschwindigkeitsgradient L in einen symmetrischen undin einen schiefsymmetrischen Tensor aufgespalten
L = D + W. (196) kinem1350
Dabei heißt die symmetrische Große
D = DT (197) kinem1360
Deformationsgeschwindigkeitstensor oder kurz Deformationsgeschwindigkeit. Man beachte,dass es sich um eine tensorielle Große handelt, auch wenn dies bei der zweiten Bezeichnungnicht zum Ausdruck kommt. Die schiefsymmetrische Große
W = −WT (198) kinem1370
wird als Drehgeschwindigkeitstensor oder Wirbeltensor bezeichnet. Die Zerlegung 298 isteindeutig und fuhrt auf die Berechnungsvorschrift
D =1
2(L + LT ), W =
1
2(L − LT ). (199) kinem1380
So wie die Verzerrungstensoren zur Formulierung von Materialgesetzen fur Festkorper her-angezogen werden, dient die Deformationsgeschwindigkeit D der Formulierung von Stoff-gleichungen fur viskose Fluide. Die Interpretation der Deformationsgeschwindigkeit ergibtsich aus der Anderungsgeschwindigkeit von Quadraten von Linienelementen
d
dt(dx · dx − dX · dX) = dx · dx + dx · dx
= (L · dX) · dX + dX · (L · dX)
= dX · (L + LT ) · dX = dX · 2 D · dX.
(200) kinem1380a

64 Kontinuumsmechanik WS 16/17
Die Struktur von 200 entspricht der Struktur 168, die zur Einfuhrung des GreenschenVerzerrungstensors in 176 bzw. des Almansischen Verzerrungstensors gefuhrt hat.
Die zeitliche Anderung der Verzerrungstensoren E und A steht in Zusammenhang mit derDeformationsgeschwindigkeit. Aus 176 berechnet man
E =1
2
d
dt(FT · F) =
1
2(FT · F + FT · F). (201) kinem1390
Ersetzt man nun die materielle Zeitableitung F durch die Identitat
F = L · F, FT = FT · LT (202) kinem1400
nach 296, so ergibt sich
E =1
2(FT · LT · F + FT · L · F) = FT · 1
2(L + LT ) · F. (203) kinem1450
Die Verzerrungsgeschwindigkeit D stellt somit den Vorwartstransport der materiellen Zeit-ableitung des Green-Lagrangeschen Verzerrungstensors dar
E = FT ·D · F (pull back),
D = FT−1 · E · F−1 (push forward).
(204) kinem1460
Ersetzt man E in 204 durch den Ruckwartstransport des Almansitensors A nach 178, soerhalt man
D = FT−1 · (FT ·A · F + FT · A · F + FT ·A · F) · F−1. (205) kinem1470
Mit der Definiton des raumlichen Geschwindigkeitsgradienten nach 296 folgt daraus
D = FT−1 · (FT · LT ·A · F + FT · A · F + FT ·A · L · F) · F−1
= A + LT ·A + A · L.(206) kinem1480
Die Verzerrungsgeschwindigkeit kann demnach uber eine Rate des Almansitensors be-rechnet werden, die keine materielle Zeitableitung darstellt, sondern die sogenannte obereOldroyd-Ableitung oder die obere Lie-Ableitung
D =4A . (207) kinem1490
Die obere Lie-Ableitung eines zweistufigen Tensors T ist dabei allgemein definiert als pushforward der materiellen Zeitableitung des pull backs einer tensoriellen Große, die sich aufdie Momentankonfiguration bezieht. Die Berechnungsvorschrift fur die obere Lie-Ableitungwird als
4A = A + LT ·A + A · L (208)
kinem1500 ermittelt. Lie-Ableitungen spielen insbesondere bei Betrachungen von Relativ-bewegungen eine wesentliche Rolle, die hier allerdings nicht vertieft wird.
α-Version vom 3.12.2016 65
4.8 Bilanzgleichungen
Wie bereits in Abschnitt 2 dargelegt, werden die Bilanzaussagen axiomatisch eingefuhrt,d. h. sie entstammen der Erfahrung und sind innerhalb der Theorie nicht beweisbar. Im vor-liegenden Abschnitt werden die notwendigen Axiome zur Formulierung der Bilanzaussagenfur Masse, Impuls und Drall eingefuhrt und in die Sprache der Mathematik ubersetzt.
4.9 Massenbilanz
Axiom: Die Masse eines materiellen Korpers andert sich wahrend seiner Bewegung nicht.
Ein materieller Korper behalt also wahrend der Bewegung seine Masse. Falls der materielleKorper wahrend der Bewegung in mehrere Teile zerfallt, z. B. durch Bruchvorgange, bleibtdie Masse des Gesamtsystems (also aller Teilkorper) erhalten. Dieser Fall wird im weiterenaber nicht diskutiert.
Mathematisch kann die Massenerhaltung fur einen materiellen Korper B folgendermaßenformuliert werden:
m(B, t) =
∫B
dm =
∫B
ρ dv = konst. (209) bilanz10
Darin bezeichnet B den materiellen Korper, dm ein Massenelement, dv ein Volumenelementund
ρ =dm
dv(210) bilanz20
die Dichte. Die Masse eines materiellen Korpers ergibt sich demnach aus der Integrationuber die Massendichte ρ. Die Kontinuumsannahmen fuhren dazu, dass die Dichte in jedemmateriellen Punkt des Kopers definiert ist.
Bildet man von 209 die zeitliche Ableitung, so folgt
d
dt
∫B
ρ dv = 0. (211) bilanz30
Gl. 211 stellt die globale Form der Massenerhaltung dar, d. h. eine Aussage, die fur dengesamten Korper gultig ist.
Oft ist man im Gegensatz zu 211 jedoch an sogenannten lokalen Aussagen interessiert, diefur jeden einzelnen Punkt im Inneren des Korpers B gelten. Dazu mussen die Integrationund die Differentiation vertauscht werden. Allerdings ist dabei zu beachten, dass sich dasvon dem betrachteten Korper eingenommene Volumen wahrend der Bewegung verandernkann, so dass sich die Integration uber ein zeitlich veranderliches Gebiet erstreckt (vgl.Leibnizsche Regel). Formal kann man dieses Problem umgehen, indem man den Korper
66 Kontinuumsmechanik WS 16/17
auf die konstante Geometrie B0 der Referenzkonfiguration zuruckzieht. Mit dem Zusam-menhang 160 folgt dann
d
dt
∫B
ρ dv =d
dt
∫B0
ρ det F dV = 0. (212) bilanz40
Da in Gl. 212 (rechts) das Integrationsgebiet B0 konstant ist, konnen Integration undDifferentiation vertauscht werden, sofern die Felder hinreichend stetig und differenzierbarsind. Man findet ∫
B0
(dρ
dtdet F + ρ
d
dt[det F]
)dV = 0. (213) bilanz50
Im weiteren soll, sofern nichts anderes erwahnt wird, immer vorausgesetzt werden, dass dienotwendigen Stetigkeitsanforderungen erfullt sind.
Es gilt (an dieser Stelle ohne Beweis)
d(det F)
dt= div v det F = J div v, (214) bilanz60
so dass in 213 der Faktor J = det F ausgeklammert werden kann. Der Vorwartstransport(push forward) auf die aktuelle Konfiguration unter Beachtung von Gl. 160 liefert schließlich∫
B
(ρ + ρ div v) dv = 0. (215) bilanz70
Dieses Ergebnis erhalt man auch, wenn man in 211 die Reihenfolge von Integration undDifferentiation umkehrt und formal die Produktregel der Differentiation anwendet, d. h.man beachtet, dass sowohl die Dichte ρ als auch die materiellen Volumenelemente dvzeitlich veranderlich sind. Es folgt mit dieser Argumentation
d
dt
∫B
ρ dv =
∫B
d
dt(ρ dv) = 0. (216) bilanz80
Mit den Zusammenhangen 160 und 214 gilt
d(dv)
dt= div v dv, (217) bilanz90
so dass sich der Zusammenhang 215 direkt ergibt.
Da man die entsprechenden Uberlegungen auch fur beliebige Teilkorper von B, insbesondereauch fur beliebig kleine Teilkorper, anstellen kann, muss der Integrand in 215 Null sein,damit die integrale Aussage gilt fur beliebige Teilkorper gelten. Diese Argumentation folgtdirekt aus der Kontinuumsannahme und dem Schnittprinzip.

α-Version vom 3.12.2016 67
Damit gelangt man schließlich zur lokalen Form der Massenbilanz
ρ + ρ div v = 0. (218) bilanz100
Setzt man nach 214
div v =(det F)•
det F(219) bilanz100a
in 218 ein, so folgt die Trennung der Veranderlichen
ρ
ρ= −(det F)•
det F(220) bilanz100b
Diese Form der Massenbilanz kann integriert werden
t∫t0
ρ
ρdt = −
t∫t0
(det F)
det Fdt. (221) bilanz100c
Mit den Variablentransformationen
ρ dt→ dρ, (det F) dt→ d(det F) (222) bilanz100d
und der Transformation der Integrationsgrenzen ergibt sich
ρ∫ρ0
dρ
ρ= −
det F∫1
d(det F)
det F(223) bilanz100e
Dabei wurden zum Anfangszeitpunkt t0 die Bedingungen ρ = ρ0 und det F = 1 und zumZeitpunkt t die Werte ρ und det F = J eingesetzt. Die Abkurzung J steht dabei fur dieJacobi-Determinante. Auswertung der Integrale fuhrt schließlich auf die Beziehung
ρ = ρ0 (det F)−1 = ρ0 J−1. (224) bilanz100f
Diese Form der Massenbilanz gestattet es, aus der Anfangsdichte ρ0 und der DeterminanteJ des Deformationsgradienten den aktuellen Dichtewert zu berechnen. Diese Darstellung istvor allem in der Festkorpermechanik bei finiten Deformationen gebrauchlich. Die Beziehung224 kann auch direkt aus der Gl. 209 motiviert werden, wenn man die Dichte und dieVolumenelemente auf die Referenzkonfiguration zuruckzieht. Mit dem Argument, dass auchdie Masse beliebig kleiner materieller Korper unverandert bleibt, folgt dann
ρ dv = ρ0 dV, (225) bilanz100ff
und mit der Verknupfung dv = J dV folgt schließlich der Ausdruck
ρ dv = ρ0 J−1dv → ρ = ρ0 J
−1 (226) bilanz100fff
Die Aussage 225 ist identisch mit der Uberlegung zur Massenbilanz im Abschnitt 2.
68 Kontinuumsmechanik WS 16/17
4.10 Impulsbilanz
Axiom: Der Impuls eines materiellen Korpers andert sich durch die an ihm angreifendenKrafte.
In der globalen Formulierung kann man somit die Impulsbilanz als
l = f (227) bilanz170
angeben. Der Impuls eines materiellen Korpers ist dabei durch seine Dichte und seineGeschwindigkeit bestimmt
l(B, t) =
∫B
x dm =
∫B
ρ x dv. (228) bilanz180
Die auf den Korper einwirkende Kraft kann man in die Summe aus den Nah- und Fernwir-kungskraften aufteilen. Die Nahwirkungskrafte wirken dabei uber die Oberflache ∂B aufden Korper ein und haben ihre Ursache in der direkten Umgebung, die mit dem Korperuber seine Oberflache in Kontakt steht. Die Fernwirkungskrafte haben ihre Ursache nichtin der direkten Umgebung des Korpers und wirken in seinem Inneren. Eine typische Fer-wirkungskraft ist die Gravitationskraft. Damit erhalt man mit dieser Aufteilung
f =
∫∂B
t da +
∫B
ρb dv. (229) bilanz190
Dabei stellt t die Spannungsvektor auf der Korperoberflache dar, die durch Kontakt desKorpers mit seiner Umgebung ubertragen wird, wahrend ρb die Volumenkraftdichte ist,die im Inneren des Korpers wirkt.
Die globale Form der Impulsbilanz lautet unter Beachtung von 228 und 229
d
dt
∫B
ρ x dv =
∫∂B
t da +
∫B
ρb dv. (230) bilanz200
Gl. 230 stellt eine globale Aussage dar, die fur den Korper als Ganzes Gultigkeit besitzt.
Genau wie bei der Massenbilanz ist man an einer lokalen Aussage interessiert, die an deneinzelnen materiellen Punkten innerhalb des Korpers gultig ist. Dazu muss wiederum dieZeitableitung mit der Integration uber den deformierbaren materiellen Korper vertauschtwerden.
d
dt
∫B
ρ x dv =
∫B
d
dt(ρ x dv). (231) bilanz210
Mit dem Transporttheorem fur Volumenelemente 217 und der Produktregel der Differen-tiation erhalt man
l =
∫B
(ρ x + ρ x + ρ x div x) dv. (232) bilanz220

α-Version vom 3.12.2016 69
Dieser Ausdruck kann unter Berucksichtigung der lokalen Form der Massenbilanz 218 weiterzusammengefaßt werden, und es verbleibt
l =
∫B
ρ x dv (233) bilanz230
Allgemein gilt fur massenbezogene Großen Ψ = ρψ
d
dt
∫B
Ψ dv =
∫B
(Ψ + Ψ div x)dv =
∫B
(ρ ψ + ρ ψ + ρψ div x) dv. (234)
bilanz230a Die zwei letzten Summanden entsprechen der mit ψ multiplizierten lokalen Formder Massenbilanz. Damit erhalt man das Reynoldssche Transporttheorem in der Form
d
dt
∫B
ρψ dv =
∫B
ρ ψ dv. (235) bilanz230b
Um in Gl. 230 zu einer lokalen Aussage zu gelangen, muss weiterhin das Oberflachenintegralder Nahwirkungskrafte in ein Volumenintegral transformiert werden. Die ist moglich, wennfur die Oberflachenkraftdichte t auf dem Rand des Korpers das Cauchy-Theorem gilt
t = T · n, (236) bilanz240
wenn also ein Spannungstensor T existiert, der mit der Schnittnormalen n den Spannungs-vektor auf der Oberflache (oder einer beliebigen Schnittflache durch den Korper) erzeugt.In diesem Fall kann der Gaußsche Satz (Divergenztheorem) angewandt werden, sofernder Spannungstensor uber die notwendigen Stetigkeits- und Differentiationsanforderungenverfugt. Es folgt ∫
∂B
tda =
∫∂B
T · n da =
∫B
div T dv. (237) bilanz250
Die Kombination der Gleichungen 230, 233 und 237 fuhrt auf∫B
(ρ x − div T − ρb) dv = 0. (238) bilanz260
Da die Impulsbilanz 238 auch fur beliebige Teilkorper gilt, muss der Integrand selbst Nullsein. Damit gelangt man zur lokalen Form der Impulsbilanz
ρ x = div T + ρb. (239) bilanz270
Diese Formulierung bezieht sich auf die aktuelle Konfiguration. Die Divergenz wird daherauch bezuglich des Ortsvektors x der Momentankonfiguration gebildet.
Im Rahmen der Festkorpermechanik stellt man oft die Impulsbilanz im Bezug auf dieGeometrie der Referenzkonfiguration dar, d. h. man bezieht sich auf die undeformierte

70 Kontinuumsmechanik WS 16/17
Ausgangskonfiguration des Korpers. Um die entsprechende Darstellung der Impulsbilanzanzugeben, startet man von der globalen Formulierung
d
dt
∫B
ρ x dv =
∫∂B
T · da +
∫B
ρb dv (240) bilanz330
und transformiert diese auf den Bereich B0 des undeformierten Korpers zuruck. Dazumussen die Volumen- und Flachenelemente gemaß 166 transformiert werden
d
dt
∫B0
ρ x det F dV =
∫∂B0
T · ((det F) FT−1 · dA) +
∫B0
ρb det F dV. (241) bilanz340
In den Volumenintegralen kann die Dichte ρ uber die Massenbilanz 224 durch die Dichteρ0 der Referenzkonfiguration ersetzt werden
d
dt
∫B0
ρ0 x dV =
∫∂B0
T · (det F FT−1 · dA) +
∫B0
ρ0 b dV. (242) bilanz350
In dem Oberflachenintegral wird die Große
P = (det F) T · FT−1 (243) bilanz360
eingefuhrt. Sie heißt erster Piola-Kirchhoff-Spannungstensor. Wahrend die Cauchy-Spannungt = T · n die wirkende Kraft auf ein Flachenelement der aktuellen Konfiguration be-zieht, bezieht die erste Piola-Kirchhoff-Spannung die selbe Kraft auf ein undeformiertesFlachenelement der Referenzkonfiguration. Man bezeichnet daher die erste Piola-Kirchhoff-Spannung auch als Nominalspannung. Im Gegensatz dazu stellt die Cauchy-Spannung diewahre Spannung dar. Gemaß der Einfuhrung dieser Spannungsgroßen gilt also
T · da = P · dA. (244) bilan370
Unter Anwendung des Gaußschen Integralsatzes und unter der ublichen Annahme derStetigkeit des Integranden gelangt man schließlich zu der lokalen Form der Impulsbilanzmit Bezug auf die Referenzkonfiguration
ρ0d2 x
dt2= Div P + ρ0 b. (245) bilanz380
Der Divergenzoperator in 245 bezieht sich dabei auf die Ortsvektoren X der Referenzkon-figuration.
Neben dem ersten Piola-Kirchhoff-Spannungstensor P werden in der Literatur auch diegewichtete Cauchy-Spannung oder die Kirchhoff-Spannung
τττ = (det F) T (246)

α-Version vom 3.12.2016 71
bilanz390 und der zweite Piola-Kirchhoff-Tensor
S = (det F) F−1 ·T · FT−1 (247)
bilanz400 eingefuhrt. Die Bedeutung des zweiten Piola-Krichhoff-Tensors wird im Rahmeneiner energetischen Betrachtung deutlich. Dazu geht man von der spezifischen Spannungs-leistung
ρw = T : D = T11D11 + T12D12 + . . . (248) bilanz400a
aus und transformiert die Deformationsgeschwindigkeit in die Referenzkonfiguration. Dazunutzt man den Zusammenhang 204 zwischen D und E. Mit Anwendung der Rechenregelnfur das zweifach verjungende Produkt zwischen Tensoren gelangt man dann zu der Aussage
w =1
ρD : T =
1
ρ0
E : S. (249) bilanz400b
Die spezifische Spannungsleistung lasst sich also entweder durch D und T oder durchE und S darstellen. Gleichung 249 zeigt somit die Invarianz der Spannungsleistung beieinem Wechsel der Bezugskonfiguration von der Momentan- auf die Referenzkonfiguration.Die jeweils zusammengehorigen Großen D und T bzw. E und S werden als energetischkonjugierte Variablen bezeichnet.
4.11 Drallbilanz
Axiom: Der Drall eines materiellen Korpers andert sich durch die an ihm angreifendenMomente.
Die globale Form der Drallbilanz kann gemaß dem zugrunde liegenden Axiom als
hp = mp (250) bilanz420
angegeben werden. Der Index p kennzeichnet dabei einen beliebigen aber festen Bezugs-punkt xp, ohne Beschrankung der Allgemeinheit kann dazu der Ursprung des Koordina-tensystems verwendet werden.
Der Drall eines materiellen Korpers ist durch das Moment des Impuls definiert und be-rechnet sich daher zu
hp =
∫B
(x − xp)× ρ x dv (251) bilanz430
In der englisch-sprachigen Literatur wird der Dall als”moment of momentum“ bezeichnet.
Die auf den Korper einwirkenden Momente resultieren aus den Momenten der angreifendenKrafte mit Bezug auf den Punkt xp. Mit der bereits oben einguhrten Aufteilung in Nah- und

72 Kontinuumsmechanik WS 16/17
Fernwirkungskrafte bzw. in Oberflachen- und Volumenkraftichten folgt fur die zugehorigenMomente
mp =
∫∂B
(x − xp)× t da +
∫B
(x − xp)× ρb dv. (252) bilanz440
Setzt man die Beziehungen 251 und 252 in die Drallbilanz ein, so gelangt man zu derfolgenden globalen Darstellung der Drallbilanz
d
dt
∫B
(x − xp)× ρ x dv =
∫∂B
(x − xp)× (T · n) da +
∫B
(x − xp)× ρb dv. (253) bilanz450
Vertauscht man auch hier auf der linken Seite die materielle Zeitableitung mit der Integra-tion uber das von dem Korper eingenommene, veranderliche Volumen, so ergibt sich unterBeachtung des Reynoldsschen Transporttheorems 235
d
dt
∫B
(x − xp)× ρ x dv =
∫B
d
dt[(x − xp)× (ρ x) + (x − xp)× ρ x div x] dv
=
∫B
(x − xp)× ρ x dv.(254) bilanz460
Dabei wurde beachtet, dass das Kreuzprodukt zwischen zwei parallelen Vektoren Null ist,
x× ρ x = 0, (255) bilanz470
und dass der Bezugspunkt xp fest gewahlt ist, d. h. xp = 0. Weiterhin wurde von derMassenbilanz 218 Gebrauch gemacht.
Um das Oberflachenintegral wieder in ein Volumenintegral umformen zu konnen, muss dasKreuzprodukt zwischen einem Vektor und einem Tensor definiert werden. Analog zu demVektorprodukt 114 gilt dann
a×B :=3
E : (a⊗B). (256) bilanz480
Das Ergebnis dieses Produktes ist ein Tensor 2. Stufe.
Falls der Tensor B selbst als Dyadenprodukt zweier Vektoren b und c dargestellt werdenkann, folgt aus 256
a× (b⊗ c) = (a× b)⊗ c. (257) bilanz490
Das Ergebnis ist also ein Tensor zweiter Stufe, der aus dem Dyadenprodukt von a×b undc gebildet wird. Fur das Oberflachenintegral in 253 heißt das
(x − xp)× (T · n) = [(x − xp)×T] · n. (258) bilanz500
Als Konsequenz dieser Uberlegungen kann nun der Gaußsche Integralsatz angewandt wer-den, so dass man ∫
∂B
(x − xp)× (T · n) da =
∫B
div[(x − xp)×T] dv (259) bilanz510
α-Version vom 3.12.2016 73
erhalt.
Unter Verwendung kartesischer Koordinaten kann man zeigen, dass fur den Divergenzaus-druck auf der rechten Seite von 259
div[(x − xp)×T] =3
E : T + (x − xp)× div T. (260) bilanz520
gilt, wobeiA
t =1
2
3
E : TT (261) bilanz520a
der axiale Vektor (vgl. Gl. 113) zum Spannungstensor ist.
Kombination der Zwischenergebnisse fuhrt auf∫B
[(x − xp)× (ρ x) − (x − xp)× div T − (x − xp)× ρb
]dv
︸ ︷︷ ︸= 0
=
∫B
2A
t dv. (262)
bilanz550 Man erkennt, dass die linke Seite von ?? durch die mit x − xp multiplizierteImpulsbilanz 239 gegeben ist. Als endgultiges Ergebnis der Drallbilanz erhalt man daherdie Aussage
A
t = 0. (263)
bilanz560 Der axiale Vektor des Spannungstensors ist identisch mit dem Nullvektor. Diesist genau dann der Fall, wenn der Spannungstensor symmetrisch ist.
Fur den Spannungstensor wird in einer kontinuumsmechanischen Theorie eine Verknupfungmit kinematischen Großen, z. B. mit Verzerrungstensoren, postuliert. Die wohl bekannte-ste Beziehung der sogenannten Konstitutivgleichungen ist das verallgemeinerte HookescheGesetz. In diesem Fall ist der Spannungstensor proportional zur Verzerrung. Die durch dieDrallbilanz geforderte Symmetrie ist damit grundsatzlich erfullt, so dass bei Verwendungdes verallgemeinerten Hookeschen Gesetztes die Drallbilanz keine neue Information liefert.In den Anwendungen tritt sie daher auch meist nicht explizit auf.
Startet man alternativ zu der axiomatischen Einfuhrung der Drallbilanz von dem Boltzmann-Axiom , das die Symmetrie des Spannungstensors postuliert, so ergibt sich die Drallbilanzals direkte Konsequenz der Impulsbilanz. Die beiden Axiome sind daher aquivalent undaus der Wahl eines von beiden folgt jeweils das andere. Die Wahl der Drallbilanz als Axiomhat den Vorteil, dass leicht Erweiterungen vorgenommen werden konnen. Postuliert manneben der Existenz von Kraftspannungen auch Momentenspannungen, so gelangt man zuCosserat-Kontinuum, in dem der materielle Punkt mit den Freiheitsgraden eines starrenKorpers ausgestattet ist (translatorische und rotatorische Freiheitsgrade).
Mit der Definition des 1. Piola-Kirchhoff-Spannungstensors nach Gl. 243
P = (det F) T · FT−1 (264) bilanz560a

74 Kontinuumsmechanik WS 16/17
und der Symmetrie der Cauchy-Spannung folgt
det F T = P · FT = F ·PT . (265) bilanz560b
Die 1. Piola-Kirchhoff-Spannung ist also im Allgemeinen ein unsymmetrischer Tensor. ImGegensatz dazu ist der 2. Piola-Kirchhoff-Spannungstensor S symmetrisch.

α-Version vom 3.12.2016 75
5 Linearisierung
Die Verzerrungstensoren E und A sind bezuglich des Verschiebungsvektors u nichtlinear,da quadratische Terme auftreten. Konstitutivbeziehungen, die Spannungen und Deforma-tionsgroßen verknupfen, sind haufig ebenfalls durch nichtlineare Zusammenhange gegeben.Man ist daher an einer Linearisierung um einen als bekannt angenommenen Verschiebungs-zustand u0 interessiert. Entsprechende Linearisierungen werden z. B. bei der numerischenLosung der Feldgleichung benotigt, um das allgemeine nichtlineare Problem durch einenSatz linearer Gleichungen zu approximieren.
Die Linearisierung kann formal uber die Richtungsableitung bestimmt werden. Dazu nimmtman fur den Verschiebungszustand nimmt an, dass er additiv in eine bekannte Verschiebungund eine Abweichung davon zerlegt werden kann,
u = u0 + ε∆u. (266) kinem1110
Dabei stellt u0 den bekannten Bezugszustand dar, ∆u ist ein Verschiebungsinkrement, vondem man annimmt, das es klein ist, und ε ein Großenordnungssymbol, das die Kleinheitvon ∆u kennzeichnet. Fur ein beliebiges Funktional F(u) ergibt sich die Linearisierung
lin (F(u)) = F(u)|ε=0 +dF(u)
dε|ε=0 = F(u0) + dF (267)
kinem1120 mit Hilfe der Richtungsableitung von F in Richtung des Inkrements ∆u. Furden Deformationsgradienten findet man auf diese Weise
lin (F) = lin(I + Grad u) = F0 + dF = I + Grad u0 + dF (268) kinem1130
mit
dF =dF
dε
∣∣∣∣ε=0
=d [I + Grad(u0 + ε∆u)]
dε
∣∣∣∣ε=0
. (269) kinem1140
Die Auswertung der Ableitung an der Stelle ε = 0 liefert mit konstantem I und u0
dF = Grad ∆u. (270) kinem1150
Somit erh“alt man die formale Linearisierung des Deformationsgradienten
lin (F) = F0 + Grad ∆u. (271) kinem1160
Da der Deformationsgradient linear in der Verschiebung ist, ergibt sich gemaß der Sum-menregel der Differentiation direkt die lineare Struktur von 271. Fur den inversen Defor-mationsgradienten lautet die Linearisierung
lin(F−1) = F−1(u0) +d
dεF−1(u0 + ε∆u)
∣∣∣∣ε=0
. (272) kinem1160a

76 Kontinuumsmechanik WS 16/17
Die einfachste Art, die Ableitung des inverse Deformationsgradienten zu berechnen, nutztdie implizite Ableitung
d
dε
(F−1 · F
)=
dI
dε= 0. (273) kinem1160b
Nach der Produktregel folgt
dF−1
dε· F + F−1 · dF
dε= 0, (274) kinem1160c
so dass man letztendlich zu dem Ausdruck
dF−1
dε= −F−1 · dF
dε· F−1. (275) kinem1160d
fur die Ableitung des inversen Deformationsgradienten gelangt. Damit ergibt sich die Li-nearisierung des inversen Deformationsgradienten zu
lin(F−1) = F−10 − F−1
0 ·Grad ∆u · F−10 . (276) kinem1160e
Fur den Greenschen Verzerrungstensor verfahrt man bei der Linearisierung analog nachder Bildungsvorschrift
lin(E) =1
2
(FT
0 · F − I)
+1
2
d
dε
(FT · F − I
)ε=0
(277) kinem1170
Die Ableitung errechnet sich nach der Produktregel zu
d
dε
(FT · F − I
)ε=0
=
(dFT
dε· F + FT · dF
dε
)ε=0
= GradT ∆u·F0 + FT0 ·Grad ∆u (278) kinem1170a
Dabei wurde fur das Inkrement des Deformationstensors die Beziehung 270 genutzt. Mitder Abkurzung
C0 = FT0 · F0 (279) kinem1170b
fur den rechten Cauchy-Green-Deformationstensor des Bezugszustands folgt schließlich dieDarstellung des linearisierten Greenschen Verzerrungstensors
lin(E) =1
2(C0 − I) +
1
2
(GradT ∆u · F0 + FT
0 ·Grad ∆u). (280) kinem1170c
Setzt man fur den Deformationsgradienten des Bezugzustands noch die Beziehung 268 ein,so erhalt man eine Darstellung des linearisierten Greenschen Verzerrungstensors bezuglichder Verschiebung
lin (E) = 12
(Grad u0 + GradT u0 + GradT u0 ·Grad u0
+ Grad ∆u + GradT ∆u + GradT u0 ·Grad ∆u + GradT ∆u ·Grad u0
).
(281) kinem1180

α-Version vom 3.12.2016 77
Im Fall der Linearisierung um den Referenzzustand gilt
u0 = 0 bzw. F0 = I, (282) kinem1190
so dass sich als Linearisierung die Ingenieurverzerrung
ε = lin (E(u0 = 0)) =1
2
(Grad ∆u + GradT ∆u
)(283) kinem1200
ergibt. Bezuglich eines orthonormierten Koordinatensystems mit den Basisvektoren ei undder Identifikation u = ∆u bestimmt man die folgende Darstellung
εεε =1
2
(ui,j + uj,i
)ei ⊗ ej (284) kinem1210
oder als Koeffizientenschema
εij =
u1,112(u1,2 + u2,1) 1
2(u1,3 + u3,1)
12(u1,2 + u2,1) u2,2
12(u2,3 + u3,2)
12(u1,3 + u3,1) 1
2(u2,3 + u3,2) u3,3
. (285) kinem1220
Um den Almansi-Verzerrungstensor bezuglich der Verschiebung zu linearisieren nutzt mandie Beziehung 276. Ausgehend von
A =1
2
(I − FT−1 · F−1
)(286) kinem1230
ergibt sich fur die Linearisierung
lin(A) =1
2
(I − FT−1
0 · F−10
)+
1
2
d
dε
(I − FT−1 · F−1
)ε=0
. (287) kinem1240
Die Ableitung berechnet man als
d
dε
(I − FT−1 · F−1
)ε=0
=(FT−1 · dFT
dε· FT−1 · F−1 + FT−1 · F−1 · dF
dε· F−1
)ε=0
=
FT−10 ·GradT ∆u · FT−1
0 · F−10 + FT−1
0 · F−10 ·Grad ∆u · F−1
0 .
(288) kinem1250
MitB0 = F0 · FT
0 bzw. B−10 = FT−1
0 · F−10 (289) kinem1260
folgt fur die linearisierte Form des Almansischen Verzerrungstensors
lin(A) =1
2
(I − B−1
0
)+
1
2
(FT−1
0 ·GradT ∆u ·B−10 + B−1
0 ·Grad ∆u · F−10
). (290) kinem1270

78 Kontinuumsmechanik WS 16/17
Falls die Bezugskonfiguration wiederum die Referenzkonfiguration ist, d. h. u0 = 0, findetman
lin ((A(u0 = 0))εεε = lin (E(u0 = 0)) . (291) kinem1280
Wenn mann die Referenzkonfiguration als Bezugskonfiguration betrachtet und sich aufkleine Verschiebungen ∆u beschrankt, dann sind die Linearisierungen der beiden Verzer-rungstensoren E und A identisch und entsprechen der Ingenieurverzerrung εεε, die fur denFall kleiner Verschiebungen und kleiner Verschiebungsgradienten hergeleitet wurde.
Nutzt man im weiteren den Zusammenhang 183 zwischen den Gradienten bezuglich derMomentankonfirguration und den Gradienten bezuglich der aktuellen Konfiguration infolgender Form
grad0(. . .) · F−10 = Grad(. . .) (292) kinem1290
so erhalt man die folgende Darstelllung des linearisierten Almansitensors
lin(A) =1
2
(I − B−1
0
)+
1
2
(gradT0 ∆u ·B−1
0 + B−10 · grad0 ∆u
). (293) kinem1300
Die Linearisierung von Spannungs-Dehnungs-Beziehungen folgt ebenfalls dem skizziertenSchema. Grundsatzlich lassen sich elastische Beziehungen angeben, bei denen die Span-nungstensoren als Funktion eines Verzerrungstensors und damit des Deformatinsgradientengegeben werden. Geht man davon aus, dass fur den ersten Piola-Kirchhoff-Spannungstensoreine Beziehung
P = P(F) (294) kinem1310
gegeben ist, dann erfolgt die Linearisierung dieser Beziehung zu
lin(P) = P0 +dP (F(u0 + ε∆u))
dε
∣∣∣∣ε=0
. (295) kinem1320
Dabei stelltP0 = P(F0) (296) kinem1330
den Spannungszustand dar, der sich unter dem Verschiebungsfeld u0 des Bezugszustandseinstellt. Das Spannungsinkrement kann unter Anwendung der Kettenregel ermittelt wer-den
dP =∂P
∂F:∂F
∂ε
∣∣∣∣ε=0
, (297) kinem1340
Dabei stellt die Ableitung∂P
∂F
∣∣∣∣F=F0
=4
C (298) kinem1350
einen vierstufigen Steifigkeitstensor dar. Die Ableitung des Deformationsgradienten liefertwieder den Gradienten des Verschiebungsinkrements, so dass die linearisierte Spannungs-Dehnungs-Beziehung die folgende Form erhalt
lin(P) = P0 +4
C : Grad ∆u. (299) kinem1360

α-Version vom 3.12.2016 79
Falls die Bezugskonfiguration spannungsfrei ist, d. h. P0 = 0 und der vierstufige Steifig-keitstensor uber die richtigen Symmetrien verfugt, entsteht das verallgemeinerte HookescheGesetz
lin(P) = σ =
(2µ
4
I23 + λ
4
I
): εεε =
4
C : εεε (300) kinem1370

80 Kontinuumsmechanik WS 16/17
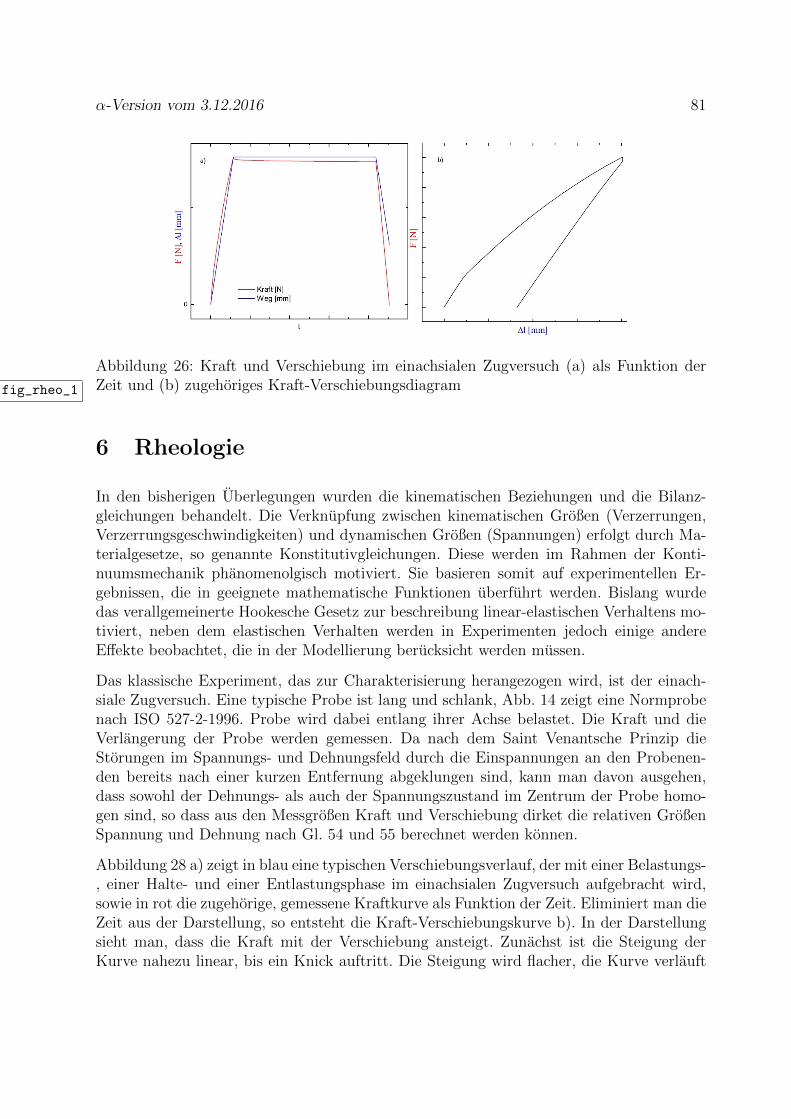
α-Version vom 3.12.2016 81
Abbildung 26: Kraft und Verschiebung im einachsialen Zugversuch (a) als Funktion derZeit und (b) zugehoriges Kraft-Verschiebungsdiagramfig_rheo_1
6 Rheologie
In den bisherigen Uberlegungen wurden die kinematischen Beziehungen und die Bilanz-gleichungen behandelt. Die Verknupfung zwischen kinematischen Großen (Verzerrungen,Verzerrungsgeschwindigkeiten) und dynamischen Großen (Spannungen) erfolgt durch Ma-terialgesetze, so genannte Konstitutivgleichungen. Diese werden im Rahmen der Konti-nuumsmechanik phanomenolgisch motiviert. Sie basieren somit auf experimentellen Er-gebnissen, die in geeignete mathematische Funktionen uberfuhrt werden. Bislang wurdedas verallgemeinerte Hookesche Gesetz zur beschreibung linear-elastischen Verhaltens mo-tiviert, neben dem elastischen Verhalten werden in Experimenten jedoch einige andereEffekte beobachtet, die in der Modellierung berucksicht werden mussen.
Das klassische Experiment, das zur Charakterisierung herangezogen wird, ist der einach-siale Zugversuch. Eine typische Probe ist lang und schlank, Abb. 14 zeigt eine Normprobenach ISO 527-2-1996. Probe wird dabei entlang ihrer Achse belastet. Die Kraft und dieVerlangerung der Probe werden gemessen. Da nach dem Saint Venantsche Prinzip dieStorungen im Spannungs- und Dehnungsfeld durch die Einspannungen an den Probenen-den bereits nach einer kurzen Entfernung abgeklungen sind, kann man davon ausgehen,dass sowohl der Dehnungs- als auch der Spannungszustand im Zentrum der Probe homo-gen sind, so dass aus den Messgroßen Kraft und Verschiebung dirket die relativen GroßenSpannung und Dehnung nach Gl. 54 und 55 berechnet werden konnen.
Abbildung 28 a) zeigt in blau eine typischen Verschiebungsverlauf, der mit einer Belastungs-, einer Halte- und einer Entlastungsphase im einachsialen Zugversuch aufgebracht wird,sowie in rot die zugehorige, gemessene Kraftkurve als Funktion der Zeit. Eliminiert man dieZeit aus der Darstellung, so entsteht die Kraft-Verschiebungskurve b). In der Darstellungsieht man, dass die Kraft mit der Verschiebung ansteigt. Zunachst ist die Steigung derKurve nahezu linear, bis ein Knick auftritt. Die Steigung wird flacher, die Kurve verlauft
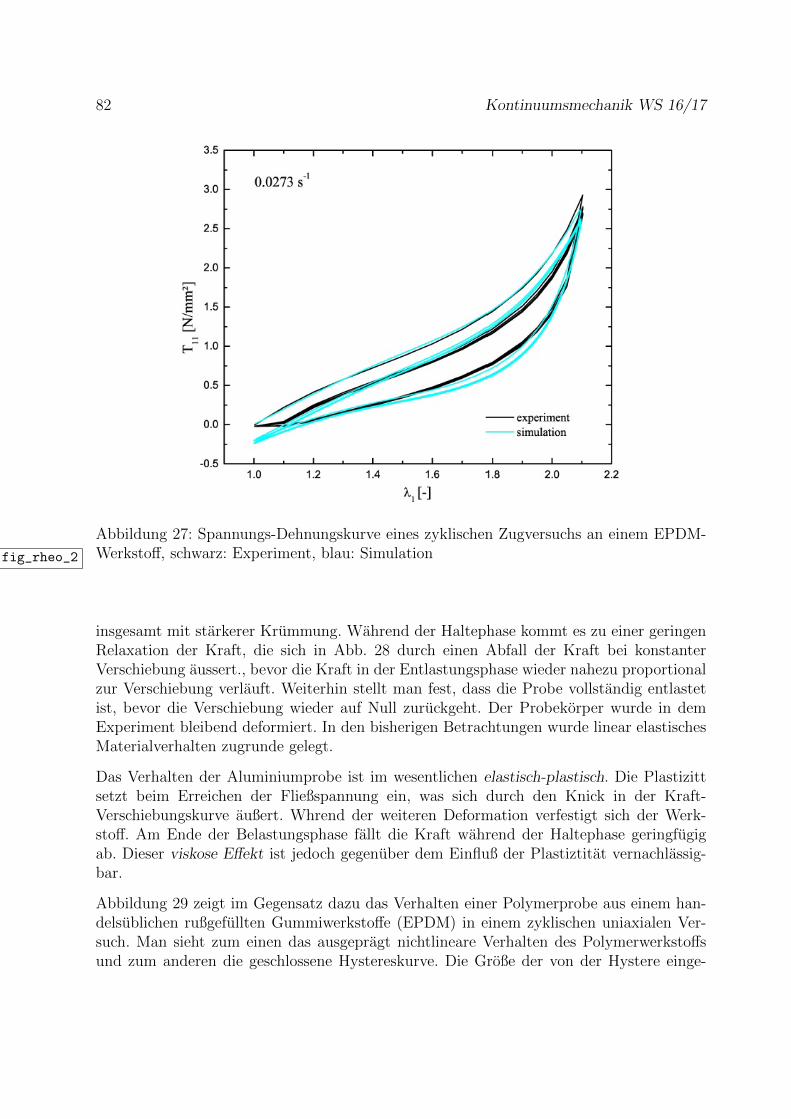
82 Kontinuumsmechanik WS 16/17
Abbildung 27: Spannungs-Dehnungskurve eines zyklischen Zugversuchs an einem EPDM-Werkstoff, schwarz: Experiment, blau: Simulationfig_rheo_2
insgesamt mit starkerer Krummung. Wahrend der Haltephase kommt es zu einer geringenRelaxation der Kraft, die sich in Abb. 28 durch einen Abfall der Kraft bei konstanterVerschiebung aussert., bevor die Kraft in der Entlastungsphase wieder nahezu proportionalzur Verschiebung verlauft. Weiterhin stellt man fest, dass die Probe vollstandig entlastetist, bevor die Verschiebung wieder auf Null zuruckgeht. Der Probekorper wurde in demExperiment bleibend deformiert. In den bisherigen Betrachtungen wurde linear elastischesMaterialverhalten zugrunde gelegt.
Das Verhalten der Aluminiumprobe ist im wesentlichen elastisch-plastisch. Die Plastizittsetzt beim Erreichen der Fließspannung ein, was sich durch den Knick in der Kraft-Verschiebungskurve außert. Whrend der weiteren Deformation verfestigt sich der Werk-stoff. Am Ende der Belastungsphase fallt die Kraft wahrend der Haltephase geringfugigab. Dieser viskose Effekt ist jedoch gegenuber dem Einfluß der Plastiztitat vernachlassig-bar.
Abbildung 29 zeigt im Gegensatz dazu das Verhalten einer Polymerprobe aus einem han-delsublichen rußgefullten Gummiwerkstoffe (EPDM) in einem zyklischen uniaxialen Ver-such. Man sieht zum einen das ausgepragt nichtlineare Verhalten des Polymerwerkstoffsund zum anderen die geschlossene Hystereskurve. Die Große der von der Hystere einge-
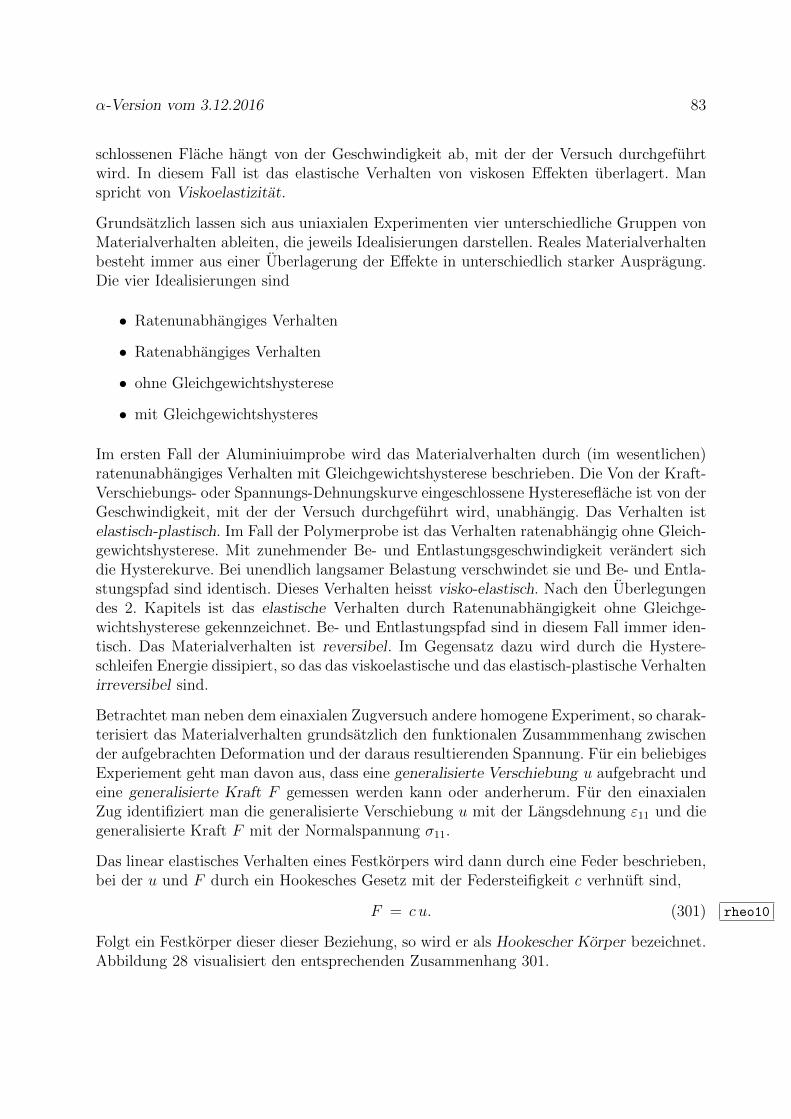
α-Version vom 3.12.2016 83
schlossenen Flache hangt von der Geschwindigkeit ab, mit der der Versuch durchgefuhrtwird. In diesem Fall ist das elastische Verhalten von viskosen Effekten uberlagert. Manspricht von Viskoelastizitat.
Grundsatzlich lassen sich aus uniaxialen Experimenten vier unterschiedliche Gruppen vonMaterialverhalten ableiten, die jeweils Idealisierungen darstellen. Reales Materialverhaltenbesteht immer aus einer Uberlagerung der Effekte in unterschiedlich starker Auspragung.Die vier Idealisierungen sind
• Ratenunabhangiges Verhalten
• Ratenabhangiges Verhalten
• ohne Gleichgewichtshysterese
• mit Gleichgewichtshysteres
Im ersten Fall der Aluminiuimprobe wird das Materialverhalten durch (im wesentlichen)ratenunabhangiges Verhalten mit Gleichgewichtshysterese beschrieben. Die Von der Kraft-Verschiebungs- oder Spannungs-Dehnungskurve eingeschlossene Hystereseflache ist von derGeschwindigkeit, mit der der Versuch durchgefuhrt wird, unabhangig. Das Verhalten istelastisch-plastisch. Im Fall der Polymerprobe ist das Verhalten ratenabhangig ohne Gleich-gewichtshysterese. Mit zunehmender Be- und Entlastungsgeschwindigkeit verandert sichdie Hysterekurve. Bei unendlich langsamer Belastung verschwindet sie und Be- und Entla-stungspfad sind identisch. Dieses Verhalten heisst visko-elastisch. Nach den Uberlegungendes 2. Kapitels ist das elastische Verhalten durch Ratenunabhangigkeit ohne Gleichge-wichtshysterese gekennzeichnet. Be- und Entlastungspfad sind in diesem Fall immer iden-tisch. Das Materialverhalten ist reversibel. Im Gegensatz dazu wird durch die Hystere-schleifen Energie dissipiert, so das das viskoelastische und das elastisch-plastische Verhaltenirreversibel sind.
Betrachtet man neben dem einaxialen Zugversuch andere homogene Experiment, so charak-terisiert das Materialverhalten grundsatzlich den funktionalen Zusammmenhang zwischender aufgebrachten Deformation und der daraus resultierenden Spannung. Fur ein beliebigesExperiement geht man davon aus, dass eine generalisierte Verschiebung u aufgebracht undeine generalisierte Kraft F gemessen werden kann oder anderherum. Fur den einaxialenZug identifiziert man die generalisierte Verschiebung u mit der Langsdehnung ε11 und diegeneralisierte Kraft F mit der Normalspannung σ11.
Das linear elastisches Verhalten eines Festkorpers wird dann durch eine Feder beschrieben,bei der u und F durch ein Hookesches Gesetz mit der Federsteifigkeit c verhnuft sind,
F = c u. (301) rheo10
Folgt ein Festkorper dieser dieser Beziehung, so wird er als Hookescher Korper bezeichnet.Abbildung 28 visualisiert den entsprechenden Zusammenhang 301.
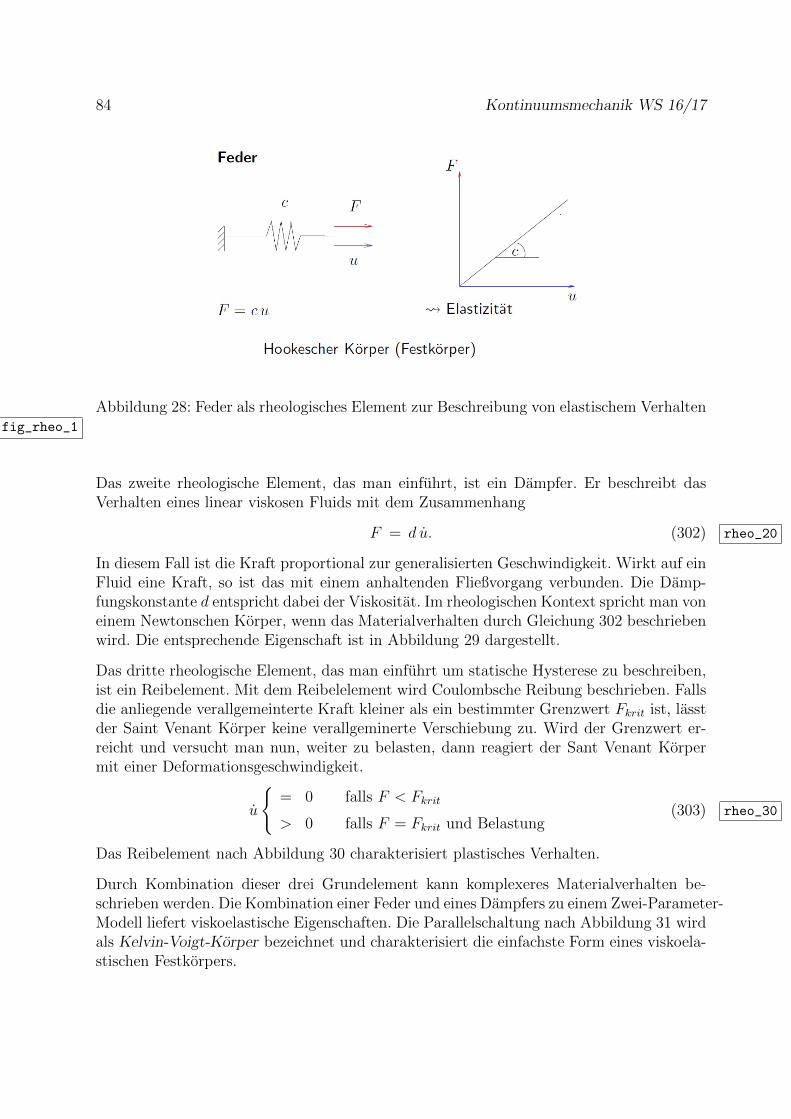
84 Kontinuumsmechanik WS 16/17
Abbildung 28: Feder als rheologisches Element zur Beschreibung von elastischem Verhaltenfig_rheo_1
Das zweite rheologische Element, das man einfuhrt, ist ein Dampfer. Er beschreibt dasVerhalten eines linear viskosen Fluids mit dem Zusammenhang
F = d u. (302) rheo_20
In diesem Fall ist die Kraft proportional zur generalisierten Geschwindigkeit. Wirkt auf einFluid eine Kraft, so ist das mit einem anhaltenden Fließvorgang verbunden. Die Damp-fungskonstante d entspricht dabei der Viskositat. Im rheologischen Kontext spricht man voneinem Newtonschen Korper, wenn das Materialverhalten durch Gleichung 302 beschriebenwird. Die entsprechende Eigenschaft ist in Abbildung 29 dargestellt.
Das dritte rheologische Element, das man einfuhrt um statische Hysterese zu beschreiben,ist ein Reibelement. Mit dem Reibelelement wird Coulombsche Reibung beschrieben. Fallsdie anliegende verallgemeinterte Kraft kleiner als ein bestimmter Grenzwert Fkrit ist, lasstder Saint Venant Korper keine verallgeminerte Verschiebung zu. Wird der Grenzwert er-reicht und versucht man nun, weiter zu belasten, dann reagiert der Sant Venant Korpermit einer Deformationsgeschwindigkeit.
u
{= 0 falls F < Fkrit
> 0 falls F = Fkrit und Belastung(303) rheo_30
Das Reibelement nach Abbildung 30 charakterisiert plastisches Verhalten.
Durch Kombination dieser drei Grundelement kann komplexeres Materialverhalten be-schrieben werden. Die Kombination einer Feder und eines Dampfers zu einem Zwei-Parameter-Modell liefert viskoelastische Eigenschaften. Die Parallelschaltung nach Abbildung 31 wirdals Kelvin-Voigt-Korper bezeichnet und charakterisiert die einfachste Form eines viskoela-stischen Festkorpers.
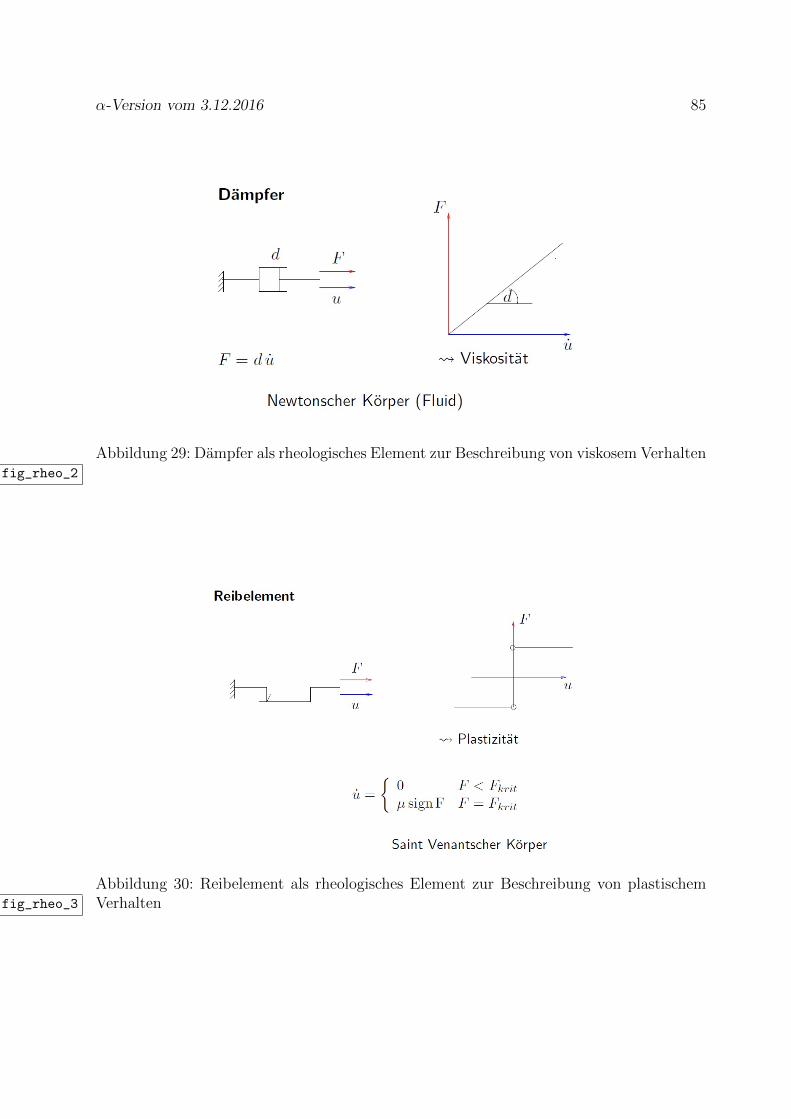
α-Version vom 3.12.2016 85
Abbildung 29: Dampfer als rheologisches Element zur Beschreibung von viskosem Verhaltenfig_rheo_2
Abbildung 30: Reibelement als rheologisches Element zur Beschreibung von plastischemVerhaltenfig_rheo_3
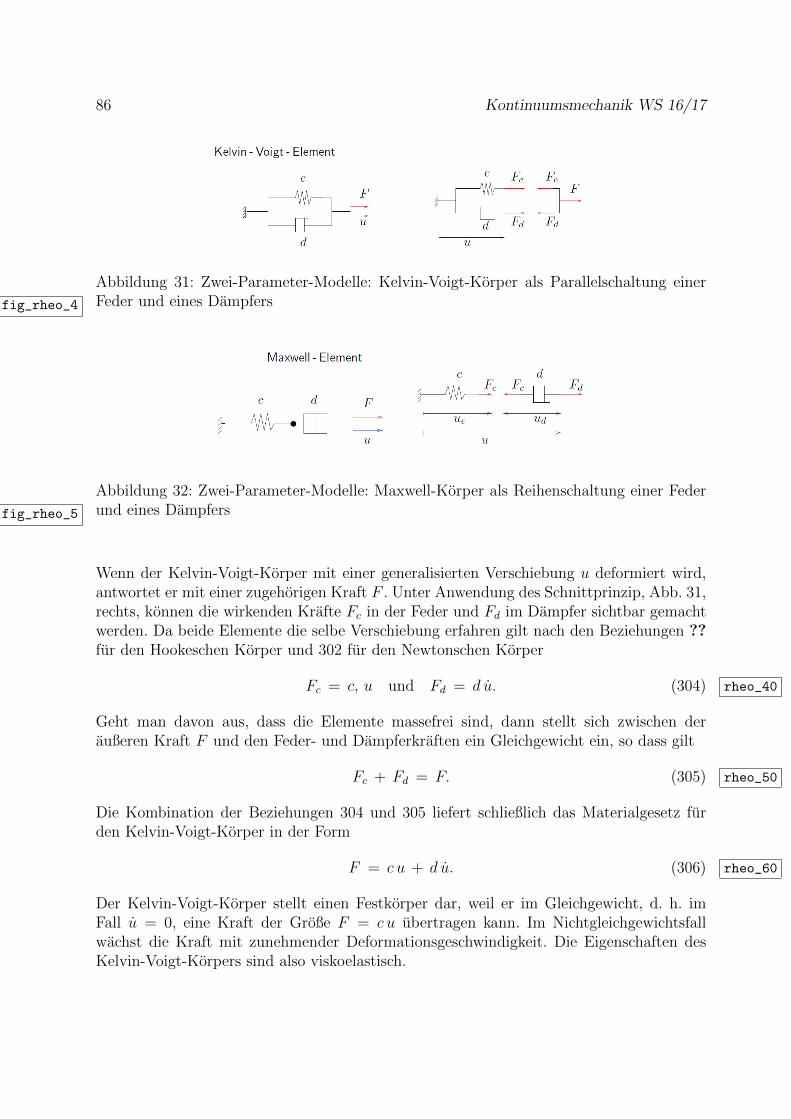
86 Kontinuumsmechanik WS 16/17
Abbildung 31: Zwei-Parameter-Modelle: Kelvin-Voigt-Korper als Parallelschaltung einerFeder und eines Dampfersfig_rheo_4
Abbildung 32: Zwei-Parameter-Modelle: Maxwell-Korper als Reihenschaltung einer Federund eines Dampfersfig_rheo_5
Wenn der Kelvin-Voigt-Korper mit einer generalisierten Verschiebung u deformiert wird,antwortet er mit einer zugehorigen Kraft F . Unter Anwendung des Schnittprinzip, Abb. 31,rechts, konnen die wirkenden Krafte Fc in der Feder und Fd im Dampfer sichtbar gemachtwerden. Da beide Elemente die selbe Verschiebung erfahren gilt nach den Beziehungen ??fur den Hookeschen Korper und 302 fur den Newtonschen Korper
Fc = c, u und Fd = d u. (304) rheo_40
Geht man davon aus, dass die Elemente massefrei sind, dann stellt sich zwischen deraußeren Kraft F und den Feder- und Dampferkraften ein Gleichgewicht ein, so dass gilt
Fc + Fd = F. (305) rheo_50
Die Kombination der Beziehungen 304 und 305 liefert schließlich das Materialgesetz furden Kelvin-Voigt-Korper in der Form
F = c u + d u. (306) rheo_60
Der Kelvin-Voigt-Korper stellt einen Festkorper dar, weil er im Gleichgewicht, d. h. imFall u = 0, eine Kraft der Große F = c u ubertragen kann. Im Nichtgleichgewichtsfallwachst die Kraft mit zunehmender Deformationsgeschwindigkeit. Die Eigenschaften desKelvin-Voigt-Korpers sind also viskoelastisch.
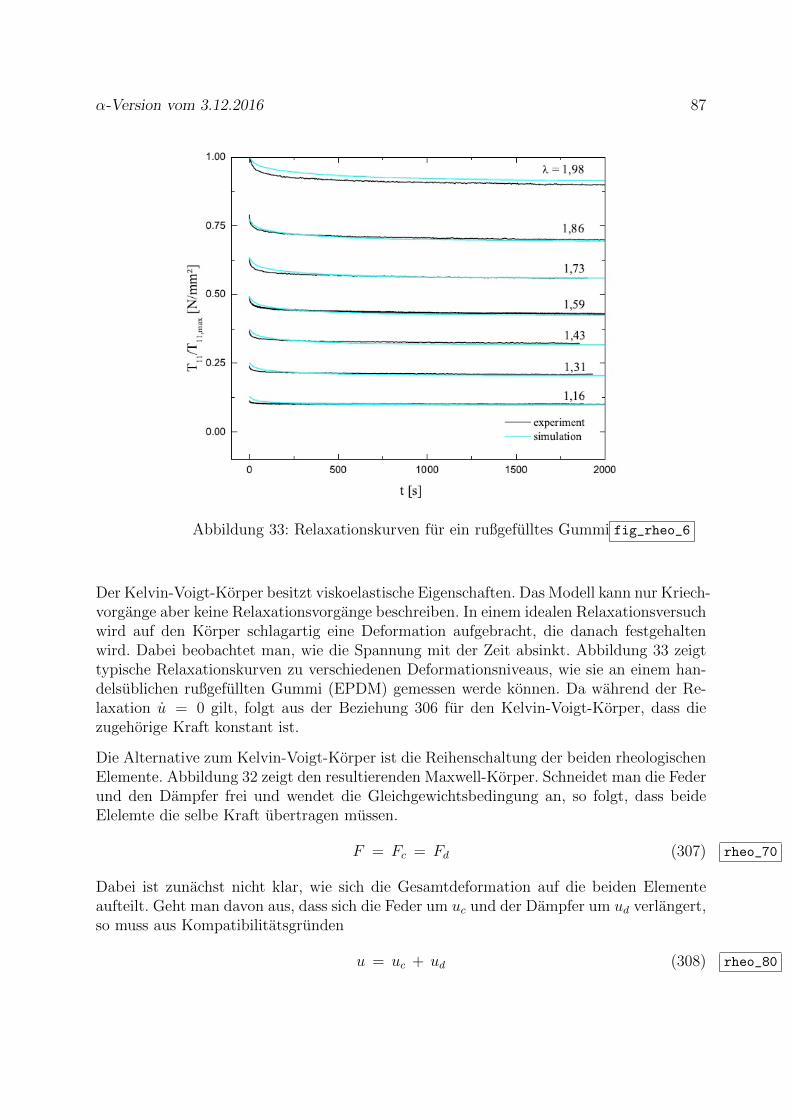
α-Version vom 3.12.2016 87
Abbildung 33: Relaxationskurven fur ein rußgefulltes Gummi fig_rheo_6
Der Kelvin-Voigt-Korper besitzt viskoelastische Eigenschaften. Das Modell kann nur Kriech-vorgange aber keine Relaxationsvorgange beschreiben. In einem idealen Relaxationsversuchwird auf den Korper schlagartig eine Deformation aufgebracht, die danach festgehaltenwird. Dabei beobachtet man, wie die Spannung mit der Zeit absinkt. Abbildung 33 zeigttypische Relaxationskurven zu verschiedenen Deformationsniveaus, wie sie an einem han-delsublichen rußgefullten Gummi (EPDM) gemessen werde konnen. Da wahrend der Re-laxation u = 0 gilt, folgt aus der Beziehung 306 fur den Kelvin-Voigt-Korper, dass diezugehorige Kraft konstant ist.
Die Alternative zum Kelvin-Voigt-Korper ist die Reihenschaltung der beiden rheologischenElemente. Abbildung 32 zeigt den resultierenden Maxwell-Korper. Schneidet man die Federund den Dampfer frei und wendet die Gleichgewichtsbedingung an, so folgt, dass beideElelemte die selbe Kraft ubertragen mussen.
F = Fc = Fd (307) rheo_70
Dabei ist zunachst nicht klar, wie sich die Gesamtdeformation auf die beiden Elementeaufteilt. Geht man davon aus, dass sich die Feder um uc und der Dampfer um ud verlangert,so muss aus Kompatibilitatsgrunden
u = uc + ud (308) rheo_80
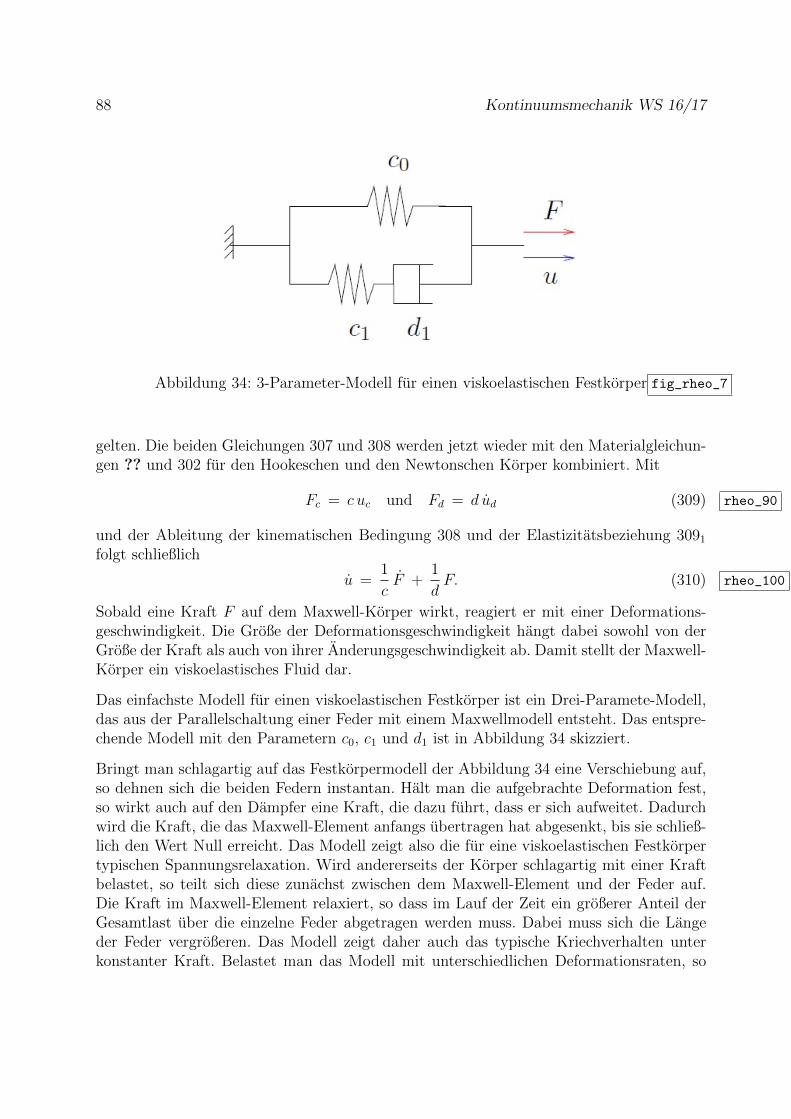
88 Kontinuumsmechanik WS 16/17
Abbildung 34: 3-Parameter-Modell fur einen viskoelastischen Festkorper fig_rheo_7
gelten. Die beiden Gleichungen 307 und 308 werden jetzt wieder mit den Materialgleichun-gen ?? und 302 fur den Hookeschen und den Newtonschen Korper kombiniert. Mit
Fc = c uc und Fd = d ud (309) rheo_90
und der Ableitung der kinematischen Bedingung 308 und der Elastizitatsbeziehung 3091
folgt schließlich
u =1
cF +
1
dF. (310) rheo_100
Sobald eine Kraft F auf dem Maxwell-Korper wirkt, reagiert er mit einer Deformations-geschwindigkeit. Die Große der Deformationsgeschwindigkeit hangt dabei sowohl von derGroße der Kraft als auch von ihrer Anderungsgeschwindigkeit ab. Damit stellt der Maxwell-Korper ein viskoelastisches Fluid dar.
Das einfachste Modell fur einen viskoelastischen Festkorper ist ein Drei-Paramete-Modell,das aus der Parallelschaltung einer Feder mit einem Maxwellmodell entsteht. Das entspre-chende Modell mit den Parametern c0, c1 und d1 ist in Abbildung 34 skizziert.
Bringt man schlagartig auf das Festkorpermodell der Abbildung 34 eine Verschiebung auf,so dehnen sich die beiden Federn instantan. Halt man die aufgebrachte Deformation fest,so wirkt auch auf den Dampfer eine Kraft, die dazu fuhrt, dass er sich aufweitet. Dadurchwird die Kraft, die das Maxwell-Element anfangs ubertragen hat abgesenkt, bis sie schließ-lich den Wert Null erreicht. Das Modell zeigt also die fur eine viskoelastischen Festkorpertypischen Spannungsrelaxation. Wird andererseits der Korper schlagartig mit einer Kraftbelastet, so teilt sich diese zunachst zwischen dem Maxwell-Element und der Feder auf.Die Kraft im Maxwell-Element relaxiert, so dass im Lauf der Zeit ein großerer Anteil derGesamtlast uber die einzelne Feder abgetragen werden muss. Dabei muss sich die Langeder Feder vergroßeren. Das Modell zeigt daher auch das typische Kriechverhalten unterkonstanter Kraft. Belastet man das Modell mit unterschiedlichen Deformationsraten, so
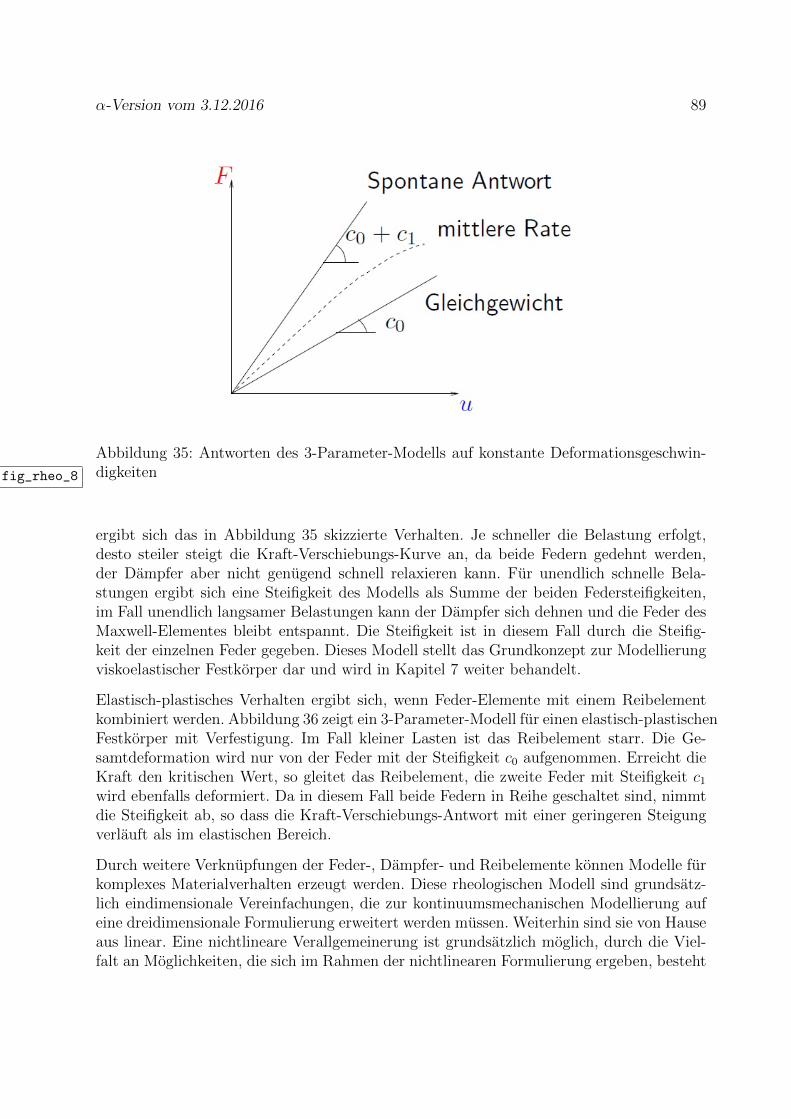
α-Version vom 3.12.2016 89
Abbildung 35: Antworten des 3-Parameter-Modells auf konstante Deformationsgeschwin-digkeitenfig_rheo_8
ergibt sich das in Abbildung 35 skizzierte Verhalten. Je schneller die Belastung erfolgt,desto steiler steigt die Kraft-Verschiebungs-Kurve an, da beide Federn gedehnt werden,der Dampfer aber nicht genugend schnell relaxieren kann. Fur unendlich schnelle Bela-stungen ergibt sich eine Steifigkeit des Modells als Summe der beiden Federsteifigkeiten,im Fall unendlich langsamer Belastungen kann der Dampfer sich dehnen und die Feder desMaxwell-Elementes bleibt entspannt. Die Steifigkeit ist in diesem Fall durch die Steifig-keit der einzelnen Feder gegeben. Dieses Modell stellt das Grundkonzept zur Modellierungviskoelastischer Festkorper dar und wird in Kapitel 7 weiter behandelt.
Elastisch-plastisches Verhalten ergibt sich, wenn Feder-Elemente mit einem Reibelementkombiniert werden. Abbildung 36 zeigt ein 3-Parameter-Modell fur einen elastisch-plastischenFestkorper mit Verfestigung. Im Fall kleiner Lasten ist das Reibelement starr. Die Ge-samtdeformation wird nur von der Feder mit der Steifigkeit c0 aufgenommen. Erreicht dieKraft den kritischen Wert, so gleitet das Reibelement, die zweite Feder mit Steifigkeit c1
wird ebenfalls deformiert. Da in diesem Fall beide Federn in Reihe geschaltet sind, nimmtdie Steifigkeit ab, so dass die Kraft-Verschiebungs-Antwort mit einer geringeren Steigungverlauft als im elastischen Bereich.
Durch weitere Verknupfungen der Feder-, Dampfer- und Reibelemente konnen Modelle furkomplexes Materialverhalten erzeugt werden. Diese rheologischen Modell sind grundsatz-lich eindimensionale Vereinfachungen, die zur kontinuumsmechanischen Modellierung aufeine dreidimensionale Formulierung erweitert werden mussen. Weiterhin sind sie von Hauseaus linear. Eine nichtlineare Verallgemeinerung ist grundsatzlich moglich, durch die Viel-falt an Moglichkeiten, die sich im Rahmen der nichtlinearen Formulierung ergeben, besteht
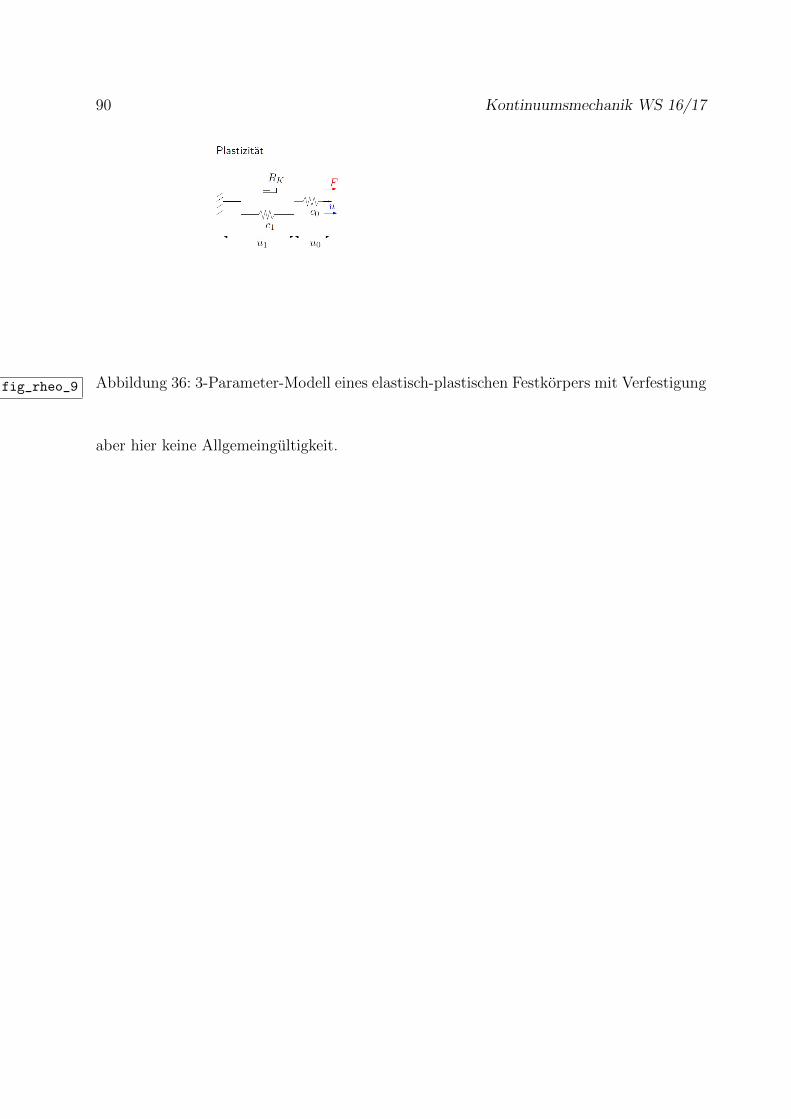
90 Kontinuumsmechanik WS 16/17
Abbildung 36: 3-Parameter-Modell eines elastisch-plastischen Festkorpers mit Verfestigungfig_rheo_9
aber hier keine Allgemeingultigkeit.

α-Version vom 3.12.2016 91
7 Materialmodellesec_material
7.1 Lineare Elastizitat
Die lineare Elastizitat wurde bereits im Abschnitt 2.4 behandelt und wird hier nur derVollstandigkeit halber nochmals wiederholt. Die Verallgemeinerung des Federgesetzes stellteine lineare Verknupfung von Spannungen und Dehnungen dar
σ =4
C : εεε, (311) mat10
d. h. die generalisierten Krafte Q werden durch den Spannungstensor σ und die generali-sierten Verschiebungen durch den Dehnungstensor εεε ersetzt. Im Fall isotropen Verhaltensbesteht der vierstufige Steifigkeitstensor, der die Proportionalitat zwischen Spannung undDehnung herstellt, aus einer Linearkombination der vierstufigen Fundamentaltensoren. Dasowohl σ als auch εεε symmetrisch sind, mussen nur der vierstufige Identitatstensor und derSpurbildner berucksichtigt werden, die transponierende Abbildung liefert keine zusatzlicheInformation. Damit folgt das verallgemeinerte Hookesche Gesetz zu
σ =
(2µ I23 +λ
4
I
): εεε = 2µεεε + λ trεεε I. (312) mat20
Betrachtet man die Arbeit, die von der Spannung verrichtet wird, wenn man den Deh-nungszustand von einem Wert εεε1 auf einen Wert εεε2 andert, so besteht sie aus der Summealler Spannungskomponenten, mit mit den jeweils zugeordneten Dehnungskomponentenentlang des Wegs vom Zustand 1 zum Zustand 2 Arbeit verrichten. Ausgehend von derspezifischen Spannungsleistung
w = σ11ε11 + σ12ε12 + σ13ε13 + . . . = σ : εεε (313) mat20a
berechnet sich die Arbeit als Integral der Leistung uber die Zeit
A12 =
t2∫t1
w dt =
t2∫t1
σ : εεε dt =
εεε2∫εεε1
σ : dεεε. (314) mat20b
Da im Fall von elastischem Verhalten Be- und Endlastungspfad im Spannungs-Dehnungs-Diagramm 37 identisch sind und nach der Beziehung 312 die Spannungen ausschließlichvom aktuellen Wert der Verzerrungen abhangen, wird in einem geschlossenen Be- undEntlastungszyklus keine Arbeit verrichtet. Es existiert ein Potential Ψ fur die Spannungen,so dass gilt
σ =∂Ψ(εεε)
∂εεε(315) mat20c
Der Integrand in 313 kann dann als
σ : εεε dt =∂Ψ
∂εεε:
dεεε
dtdt = dΨ (316) mat20d
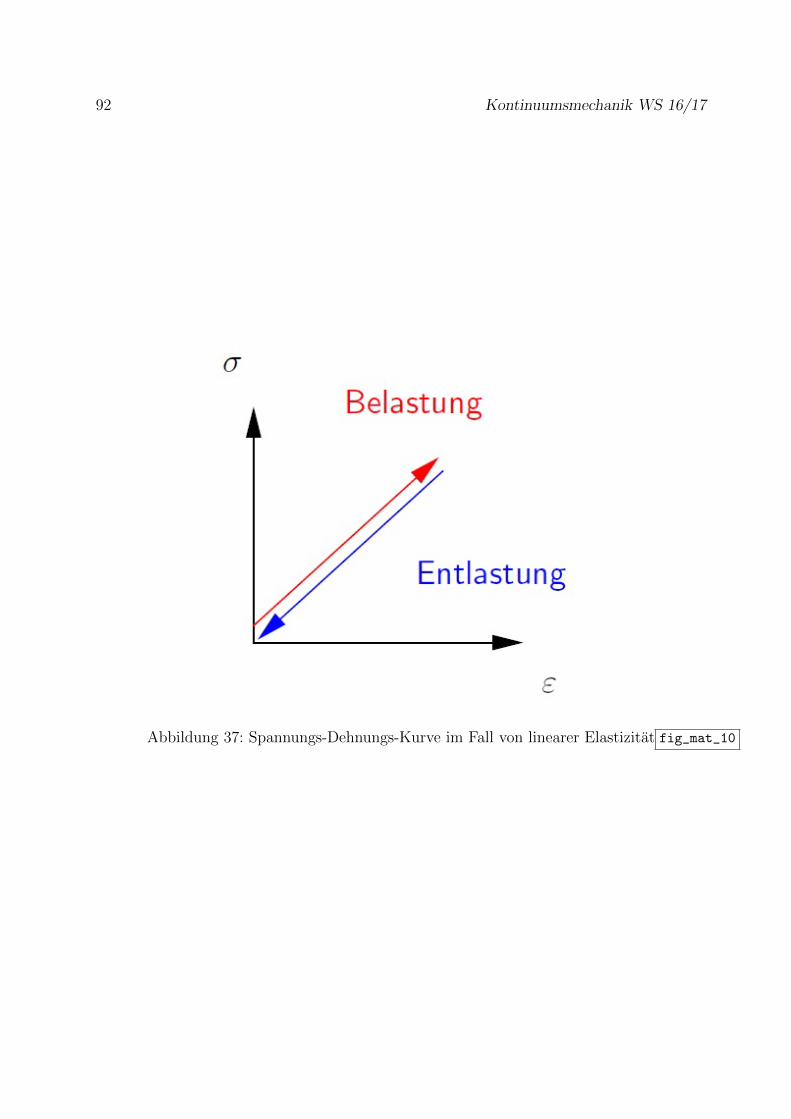
92 Kontinuumsmechanik WS 16/17
Abbildung 37: Spannungs-Dehnungs-Kurve im Fall von linearer Elastizitat fig_mat_10

α-Version vom 3.12.2016 93
geschrieben werden. Damit folgt
A12 = Ψ(εεε2) − Ψ(εεε2). (317) mat20e
Fuhrt man die Integration unter Verwendung des verallgemeinerten Hookeschen Gesetzes311 aus, so bestimmt man die Verzerrungsenergiedichte fur einen elastische Festkorper zu
Ψ = µεεε : εεε +1
2λ (εεε : I)2. (318) mat20f
7.2 Lineare Viskoelastizitat
Eine entsprechende dreidimensionale Verallgemeinerung der Dampferbeziehung fur das vis-kose Verhalten kann man als
σ = η1 εεε + η2 tr εεε I (319) mat30
angeben. Dabei treten formal zwei Viskositatsparameter η1 und η2 auf. Bei der experimen-tellen Untersuchung der Beziehung 319 stellt man jedoch fest, dass die Bestimmung beiderKonstanten sehr aufwandig ist, insbesondere volumetrische Dehnraten fuhren zu starkenErwarmungen und damit sofort zu Viskositatsanderungen. Fur viele viskose Werkstoffestellt man jedoch bei der Auswertung von Versuchen fest, dass die Berucksichtigung ei-ner Viskositat η1 6= 0 ausreichend ist, um die beobachteten Effekte zu beschreiben. Dervolumetrische Anteil wird nach der Stokesschen Annahme vernachlassigt. Die reduzierteFassung lautet dann
σ = η1 εεε (320) mat40
Auf der Basis der Verallgemeinerungen 312 und 320 kann man dann ein dreidimensionalesModell fur einen linear viskoelastischen Festkorper in Anlehung an das Drei-Parameter-Modell entwickeln. Beide Federn und der Dampfer werden durch die entsprechenden Bezie-hungen modelliert. Da sich beide Federn nicht gleich dehnen, muss genau wie in Gleichung308 die Gesamtdehnung εεε aufgespalten werden
εεε = εεεe + εεεi (321) mat50
Der Anteil εεεe beschreibt die Dehnung der Feder im Maxwell-Element wahrend die Dehnungdes Dampfers durch εεεi beschreiben wird. Die beiden Dehnungsanteile, die zur gesamten,von aussen aufgebrachten Dehnung aufsummiert werden, heißen elastische und inelastischeDehnung. Sie stellen interne Variablen dar, die erforderlich sind, um den Zustand des Sy-stems vollstandig zu beschreiben. Im Gegensatz zu den Primarvariablen, in diesem Fallder Gesamtdehnung, kann der aktuelle Wert der internen Variablen nicht von aussen vor-gegeben werden. Vielmehr stellt er sich in Abhangigkeit der Prozessgeschichte ein. Nach321 ist fur eine gegebene Verzerrung εεε nur eine der beiden internen Variablen unabhangig.Typischerweise wahlt man als unabhangige Große εεεi.

94 Kontinuumsmechanik WS 16/17
Die Abbildung 34 motiviert weiterhin eine additive Zerlegung der Spannung in die Anteile,die in der Einzelfeder und im Maxwell-Element ubertragen werden. Ein Gleichgewichts-zustand ist dadurch charakterisiert, dass sich die Krafte und Verschiebungen nicht mehrandern. In diesem Zustand ist nach einiger Zeit das Maxwell-Element vollstandig entla-stet, da der Dampfer sich so lange dehnt, bis die Feder im Maxwell-Element bei konstanterGesamtverschiebung entspannt ist. Die Spannung in der einzelnen Feder wird daher auchals Gleichgewichtsspannung σeq und die Spannung im Maxwell-Element als Nichtgleich-gewichtsspannung σneq bezeichnet. Die additive Aufspaltung der Gesamtspannung lautetsomit
σ = σeq + σneq. (322) mat60
Die dreidimensionalen Materialgesetze fur die Federn und den Dampfer konnen jetzt in derfolgenden Form angegeben werden
σeq = 2µ0 εεε + λ0 trεεε I
σneq = 2µ1 (εεε − εεεi) + λ1 (trεεε − trεεεi) I,
σneq = η1 εεεi.
(323) mat70
Die Beziehung fur das Dampferelement 3233 wird in diesem Zusammenhang als Evoluti-onsgleichung fur die interne Variable εεε aufgefasst
εεε =1
η1
σneq, (324) mat80
wahrend die beiden verbleibenden Beziehungen 3231, 2 zur Ermittlung der Spannungendienen. Die Gleichungen 321, 322 und 323 stellen ein System von gekoppelten Gleichungendar, aus dem fur ein gegebene Verzerrung εεε und eine bekannte Verzerrungsgeschwindigkeitεεε die resultierende Spannung σ berechnet werden kann.
7.3 Plastizitat
7.4 Viskoplastizitat
7.5 Schadigung