Das Riemannsche Integral im Rn - Startseite TU Ilmenau · Im Fall n = 3 k˜onnen wir uns nur noch...
24
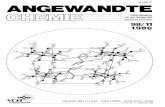
Das Riemannsche Integral im R n Ziel: Berechnung sogenannter ” zylindrischer K¨ orper“ (s. Abb. 1). Vorgehensweise: x y z a b c d z = f (x, y) ≥ 0 ˜ Z R Abbildung 1: ” Zylindrische“ Menge ˜ Z . Wir zerlegen R durch achsenparallele Strecken in Teilrechtecke R 1 ,...,R n (siehe Abb. 2). In jedem R k w¨ ahlen wir einen beliebi- gen Punkt (ξ k ,η k ). Bezeichnet |R k | den Fl¨ acheninhalt von R k , so ist f (ξ k ,η k )|R k | das Volumen des Quaders ˜ Z k (siehe Abb. 2). Die x a b c d y R k x y z graph(f ) η k Z k f (ξ k ,η k ) ξ k ˜ Z k R k Abbildung 2: Zur Volumenberechnung eines zylindrischen K¨ orpers. 1
Transcript of Das Riemannsche Integral im Rn - Startseite TU Ilmenau · Im Fall n = 3 k˜onnen wir uns nur noch...
Das Riemannsche Integral im Rn
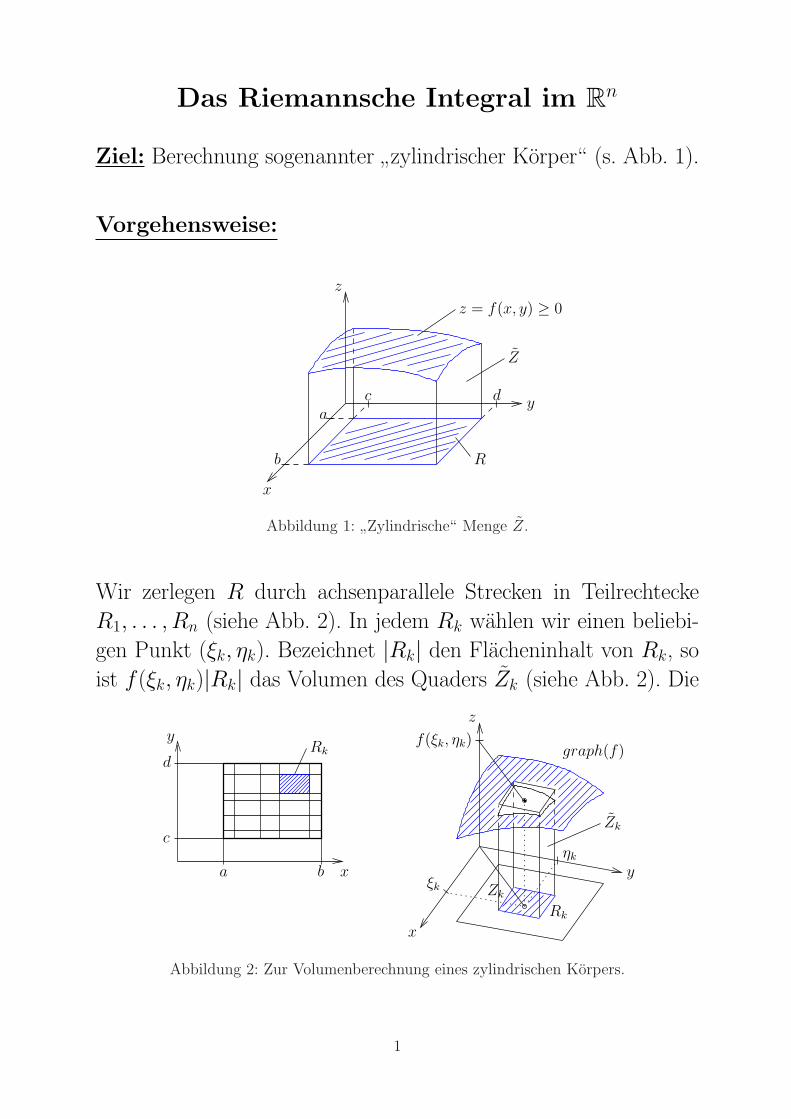
Ziel: Berechnung sogenannter”zylindrischer Korper“ (s. Abb. 1).
Vorgehensweise:
x
y
z
a
b
c d
z = f(x, y) ≥ 0
Z
R
Abbildung 1:”Zylindrische“ Menge Z.
Wir zerlegen R durch achsenparallele Strecken in Teilrechtecke
R1, . . . , Rn (siehe Abb. 2). In jedem Rk wahlen wir einen beliebi-
gen Punkt (ξk, ηk). Bezeichnet |Rk| den Flacheninhalt von Rk, so
ist f (ξk, ηk)|Rk| das Volumen des Quaders Zk (siehe Abb. 2). Die
��������
����������
����������
�������
�������
�������
�������
����������
�������������
���
�����
�����
������������
������������
��
��������
���������������������
���������������������
������������������
������������������
������������
������������
����
����
����������������
������������������
������������������
xa b
c
d
yRk
x
y
z
graph(f)
ηk
Zk
f(ξk, ηk)
ξk
Zk
Rk
Abbildung 2: Zur Volumenberechnung eines zylindrischen Korpers.
1

”Riemannsche Summe“
∑nk=1 f (ξk, ηk)|Rk| wird wieder als Appro-
ximation fur das (im Moment noch nicht definierte) Volumen von
Z angesehen.
Nehmen wir nun an, dass durch unbegrenzte Verfeinerung der Zer-
legungen und beliebiger Wahl der Zwischenpunkte (ξk, ηk) die Rie-
mannsche Summe gegen einen Grenzwert V strebt, dann werden
wir sagen, dass dem Zylinder Z ein Volumen V zugeordnet werden
kann.
I Diese Uberlegung wird benutzt, um das Riemannsche Inte-
gral aufzubauen.
Es sei Q := [a1, b1] × [a2, b2] ein kompaktes Intervall des R2 und
f : Q → R eine beschrankte Funktion mit f (x, y) ≥ 0 fur alle
(x, y) ∈ Q. Mit folgenden Schritten gelangen wir zum Riemann-
Integral von f uber Q:
1. Z := {(x0, x1, . . . , xl), (y0, y1, . . . , ym)} heißt eine Zerlegung
des kompakten Intervalles Q = [a1, b1]× [a2, b2], falls
a1 = x0 < x1 < · · · < xl = b1,
a2 = y0 < y1 < · · · < ym = b2
gilt. Mit Z(Q) wird die Menge aller Zerlegungen von Q be-
zeichnet und
‖Z‖ := maxi,j{|xi+1 − xi|, |yj+1 − yj|}
heißt die Feinheit der Zerlegung Z ∈ Z(Q).
2. Die Mengen
Qij := [xi, xi+1]× [yj, yj+1]
heißen Teilintervalle der Zerlegung Z, ihr Inhalt ist
|Qij| := (xi+1 − xi)(yj+1 − yj) .
2
3. In jedem Teilintervall Qij wird eine”Zwischenstelle“ (ξi, ηj) ∈
Qij mit xi ≤ ξi ≤ xi+1, yj ≤ ηj ≤ yj+1 ausgewahlt und die
Riemannsche Summe
R(Z) ≡ R(f ; Z) :=∑i,j
f (ξi, yj) |Qij|
zur Zerlegung Z gebildet. Wegen der Beschranktheit von f auf
Q konnen mit den (endlichen) Zahlen
mij = inf(x,y)∈Qij
{f (x, y)}, Mij := sup(x,y)∈Qij
{f (x, y)}
die speziellen Riemannschen Summen (Darboux-Summen)
Darbouxsche Untersumme: U(f ; Z) :=∑i,j
mij |Qij|,
Darbouxsche Obersumme: O(f ; Z) :=∑i,j
Mij |Qij|,
gebildet werden.
Bemerkung 1 Analog zum eindimensionalen Riemann-Integral
gelten die folgenden Aussagen:
(i) Fur jede Zerlegung Z des kompakten Intervalles Q liegt die
Riemannsche Summe stets zwischen den Darboux-Summen
U(f ; Z) ≤ R(f ; Z) ≤ O(f ; Z) . (1)
(ii) Entsteht eine Zerlegung Z2 aus einer Zerlegung Z1 durch Hin-
zunahme weiterer Zwischenpunkte (ξ∗, η∗) ∈ Q, dann gilt
U(f ; Z2) ≥ U(f ; Z1), O(f ; Z2) ≤ O(f ; Z1). (2)
(iii) Man kann zeigen, dass fur beliebige Zerlegungen
Z1, Z2 ∈ Z(Q) stets gilt
U(f ; Z1) ≤ O(f ; Z2) (3)
3

(iv) Wegen der Eigenschaft (3) existieren die Zahlen
J∗ := supZ∈Z
{U(f ; Z)}, J∗ := infZ∈Z
{O(f ; Z)} .
Sie heißen unteres bzw. oberes Darbouxsches Integral. Daruber
hinaus gilt stets
J∗ ≤ J∗ . ¤
Definition 2 (Riemann-Integral) Die Funktion f heißt
Riemann-integrierbar (auch R-integrierbar oder nur integrierbar)
uber Q, falls unteres und oberes Darbouxsches Integral uberein-
stimmen. Der gemeinsame Wert
J ≡ J(f ) = J∗ = J∗ =
ˆ
Q
f (x, y) d(x, y)
heißt das Riemann-Integral von f uber Q. (Q ist wieder das
Integrationsintervall, f der Integrand und x, y die Integrations-
variablen.) Die Menge aller uber Q integrierbaren Funktionen
wird mit R(Q) bezeichnet.
Es ist unmittelbar klar, wie sich die obige Definition auf den Fall der
Dimension n > 2 ubertragen lasst. Fur das Integral´
Q f (x, y) d(x, y)
schreibt man im Fall n = 2, 3 auch¨
Q
f (x, y) d(x, y) bzw.
˚
Q
f (x, y, z) d(x, y, z) ,
um anzudeuten, welche Dimension das kompakte Intervall Q be-
sitzt. Man spricht auch vom Doppel- oder Dreifachintegral. Mit
Q ⊂ Rn und x ∈ Q benutzt man die Schreibweiseˆ
Q
f (x) dx bzw.
¨. . .
ˆ
Q
f (x1, x2, . . . , xn) d(x1, x2, . . . , xn) .
4

Im Fall n = 3 konnen wir uns nur noch das Integrationsgebiet geo-
metrisch veranschaulichen, den Wert des 3-dimensionalen Integrals
selbst nicht mehr. Er lasst es sich jedoch als Gesamtmasse deuten,
wenn f die Verteilung der Dichte im Quader Q ⊂ R3 angibt. Fur
mehrfache Integrale von Funktionen von mehr als drei Verander-
lichen kann das Integrationsgebiet schon nicht mehr geometrisch
veranschaulicht werden. Insofern spielen fur die Anwendungen in
der Praxis die Falle n = 2 und n = 3 eine wichtige Rolle.
Satz 3 (Eigenschaften des Riemann-Integrals) Es seien
Q ⊂ Rn ein kompaktes Intervall und f, g : Q → R Riemann-
integrierbar auf Q. Dann gilt:
(i) Die Integration ist eine lineare Abbildung, d. h. es gilt mit
α, β ∈ Rˆ
Q
(αf (x) + βg(x)) dx = α
ˆ
Q
f (x) dx + β
ˆ
Q
g(x) dx.
(ii) Sind Q1 und Q2 und Q kompakte Intervalle im Rn und gilt
Q = Q1 ∪ Q2 und |Q1 ∩ Q2| = 0, so ist f ∈ R(Q) genau
dann, wenn f ∈ R(Q1) ∩R(Q2). In diesem Fall giltˆ
Q
f (x) dx =
ˆ
Q1
f (x) dx +
ˆ
Q2
f (x) dx .
(iii) Monotonie: ∀x ∈ Q : f (x) ≥ 0 ⇒ ´Q
f (x) dx ≥ 0.
(iv) Es gilt die Abschatzung∣∣∣∣ˆ
Q
f (x) dx
∣∣∣∣ ≤ˆ
Q
|f (x)| dx ≤ supx∈Q{|f (x)|} · |Q| .
5

Satz 4 (Integrabilitatskriterium) Die beschrankte Funk-
tion f | Q ⊂ Rn → R ist genau dann Riemann-integrierbar
uber Q, wenn eine der beiden folgenden Bedingungen erfullt
ist:
(i) Zu jedem ε > 0 gibt es eine Zerlegung Zε ∈ Z mit
0 ≤ O(Zε) = O(Zε)− U(Zε) < ε .
(ii) f : Q ⊂ Rn → R ist fast uberall stetig.
Bequemes Verfahren zur Auswertung des
Integrals´
Q f (x) dx:
(Ã Fuhrt auf den Satz von Fubini!)
Es sei Q := [a, b] × [c, d] ein kompaktes Intervall im R2 und
f : Q → R auf Q integrierbar. Ferner setzen wir voraus, dass
das Integral
bˆ
a
f (x, y) dx
fur jedes feste y ∈ [c, d] existiert. Unter diesen Voraussetzungen
kann man zeigen, dass die Funktion
g(y) :=
bˆ
a
f (x, y) dx, y ∈ [c, d]
auf [c, d] R-integrierbar und
ˆ
Q
f (x, y) d(x, y) =
dˆ
c
g(y) dy =
dˆ
c
bˆ
a
f (x, y) dx
dy (4)
6

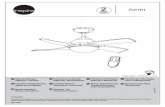
gilt. An der Formel (4) erkennen wir, dass das linksstehende In-
tegral durch ein zweifach iteriertes eindimensionales Integral be-
rechnet werden kann. Geometrisch kann die Formel (4) wie folgt
interpretiert werden. Man macht an einer festen Stelle y ∈ [c, d]
einen Schnitt durch den zylindrischen Korper mit der Grundflache
Q und der”Deckflache“ graph (f ), berechnet die dabei entstehen-
de”Flache“ (siehe in Abb. 3 die schraffierte Flache) und summiert
dann bezuglich der y-Achse (y ∈ [c, d]) diese Flachen auf. Die
x y
z
b
a
c
dy
graph(f)
Q = [a, b]× [c, d]
g(y)
Abbildung 3: Zum Satz von Fubini. Der Inhalt der schraffierten Flache ist g(y) =´ b
af(x, y) dx bei festem y ∈ [c, d].
Uberlegungen fuhren zum
Satz 5 (Fubini) Es sei f : Q → R integrierbar, Q := [a, b]×[c, d] ein kompaktes Intervall, und es mogen die Integrale
h(x) :=
dˆ
c
f (x, y) dy bzw. g(y) :=
bˆ
a
f (x, y) dx
fur alle x ∈ [a, b] bzw. y ∈ [c, d] existieren. Dann gilt
ˆ
Q
f (x, y) d(x, y) =
bˆ
a
dˆ
c
f (x, y) dy
dx =
dˆ
c
bˆ
a
f (x, y) dx
dy.
(5)
7
Bemerkung 6 1. Die Voraussetzungen des Satzes sind gewiss
erfullt, wenn f stetig auf Q ist.
2. Durch mehrfache Anwendung des letzten Satzes erhalt man die
fur die Praxis wichtige Aussage: Ist f stetig auf Q := [a1, b1] ×. . .× [an, bn], so gilt
ˆ
Q
f (x1, . . . , xn) d(x1, . . . , xn)
=
bnˆ
an
(. . .
b2ˆ
a2
( b1ˆ
a1
f (x1, . . . , xn) dx1
)dx2 . . .
)dxn . (6)
Die Reihenfolge der Integrationen darf beliebig vertauscht werden.
(Gelegentlich konnen die Klammern auch weggelassen werden.) ¤
Beispiel 7 1. Seien Q := [0, 2] × [3, 4] ⊂ R2 und f (x, y) :=
2x + 3xy2 gegeben. Da f auf Q stetig ist, lasst sich der Satz 5
direkt zur Berechnung von´
Q f (x, y) d(x, y) anwenden. Eine kurze
Rechnung liefert
´Q
f (x, y) d(x, y) =2
0
( 4
3
(2x + 3xy2) dy)dx
=2
0
(2xy + xy3)∣∣∣y=4
y=3dx =
2
0
39x dx = 78 .
2. Gegeben sind Q := [1, 2]× [2, 3]× [1, 2] und f (x, y, z) := 2z(x+y)2
.
Wiederum ist f stetig auf Q, und es folgt nach Formel (6)
´Q
f (x, y, z) d(x, y, z) =2
1
( 3
2
( 2
1
2z(x+y)2
dz)dy
)dx
=2
1
( 3
2
3(x+y)2
dy)dx =
2
1
(− 3
x+3 + 3x+2
)dx
= 12 ln 2− 3 ln 3− 3 ln 5 . ¤
8
Weder fur die Theorie noch fur die Praxis ist es ausreichend, Funk-
tionen nur uber Intervalle integrieren zu konnen. Deshalb wird nun
der Integralbegriff auf den Fall allgemeinerer Definitionsbereiche D
von f erweitert. Zuerst vereinbaren wir eine Bezeichnung. Es sei
f : D ⊂ Rn → R gegeben, und wir erklaren fD : Rn → R durch
fD(x) :=
{f (x), fur x ∈ D,
0, fur x ∈ Rn\D.
Ist speziell f (x) ≡ 1, so heißt fD die charakteristische Funktion
von D. Diese wird mit χD(x) bezeichnet. Grundlegend fur alles
Weitere ist die folgende
Definition 8 (Erweiterung des Riemann-Integrals)
Seien D 6= ∅ eine beschrankte Teilmenge des Rn und Q ein
n-dimensionales kompaktes Intervall, dass D umfaßt.
1. Dann heißt die Funktion f : D → R im Riemannschen Sinn
integrierbar (kurz: R-integrierbar oder auch nur integrierbar
auf D), wenn fD R-integrierbar auf Q ist. In diesem Fall wird
ˆ
D
f (x) dx :=
ˆ
Q
fD(x) dx (7)
das Riemannsche Integral (R-Integral ) von f uber D genannt.
D heißt wieder Integrationsbereich und R(D) bezeichnet die
Menge aller Funktionen, die auf D Riemann-integrierbar sind.
2. Die beschrankte Menge D ⊂ Rn heißt Jordan-messbar (oder
auch nur messbar, da keine weiteren Messbarkeitsbegriffe ein-
gefuhrt werden), wenn ihre charakteristische Funktion χD auf
D Riemann-integrierbar ist. In diesem Fall ist
|D| :=
ˆ
Q
χD dx =
ˆ
D
1 dx (kurz :
ˆ
D
dx)
9

der (n-dimensionale) Jordan-Inhalt von D. Fur n = 2 bzw.
n = 3 wird |D| auch als Flacheninhalt bzw. als Volumen von
D bezeichnet.
3. D heißt Nullmenge, falls D messbar ist und |D| = 0 gilt.
Insbesondere ist fur die leere Menge |∅| := 0.
Die Integrierbarkeit einer Funktion f uber einem Bereich D hangt
sowohl von qualitativen Eigenschaften der Funktion als auch vom
Bereich D ab. Wir sind im Weiteren an solchen Bereichen D inter-
essiert, auf denen jedenfalls die konstante Funktion 1 integrierbar
ist, d. h. die also Jordan-messbar sind. Der nachste Satz liefert ein
einfaches Kriterium fur die Jordan-Messbarkeit einer Menge.
Satz 9 (Messbarkeitskriterium fur Mengen) Sei D ⊂ Rn
eine beschrankte Menge. D ist genau dann Jordan-messbar,
wenn ihr Rand ∂D eine Nullmenge ist.
Satz 10 (Lebesguesches Integrabilitatskriterium)
Die Funktion f : D → R ist auf der Jordan-messbaren Menge
D genau dann R-integrierbar, wenn sie auf D beschrankt und
dort fast uberall stetig ist.
Satz 11 (Mittelwertsatz) Sei D ⊂ Rn Jordan-messbar,
f ∈ R(D) und
m := infx∈D
{f (x)}, M := supx∈D
{f (x)} .
Dann gilt
m|D| ≤ˆ
D
f (x) dx ≤ M |D| . (8)
Ist f ∈ C0(D,R) und D kompakt, dann gilt daruber hinaus
∃x0 ∈ D :
ˆ
D
f (x)dx = f (x0)|D| . (9)
10

Fur die praktische Anwendung der Integralrechnung ist es wieder-
um wichtig, dass sich auch die Integration von Funktionen uber
krummlinig berandeten Bereichen auf die iterierte eindimensionale
Integration zuruckfuhren lasst. Hierzu mussen an die Integrations-
bereiche gewisse Einschrankungen gemacht werden.
Definition 12 (Normalbereich) Eine Teilmenge D ⊂ R2
heißt Normalbereich bezuglich der x-Achse bzw. bezuglich der
y-Achse, falls sich D in der Form
Dx := {(x, y) ∈ R2 | a ≤ x ≤ b, ϕ1(x) ≤ y ≤ ϕ2(x)}bzw.
Dy := {(x, y) ∈ R2 | c ≤ y ≤ d, ψ1(y) ≤ x ≤ ψ2(y)}mit stetigen Funktionen ϕ1 und ϕ2 bzw. ψ1 und ψ2 uber den an-
gegebenen Definitionsbereichen (siehe Abb. 4) darstellen laßt.
a b x
y
ϕ2
Dx
ϕ1
c
d
y
x
Dyψ1ψ2
Abbildung 4: Normalbereich Dx bzgl. der x-Achse (links) und Normalbereich Dy bzgl. dery-Achse (rechts).
Die Indizes bei Dx bzw. Dy lassen wir weg, wenn klar ist, um was
fur einen Normalbereich es sich handelt. Die so definierten Nor-
malbereiche D sind Jordan-messbar: Aus der Stetigkeit der Funk-
tionen ϕ1 und ϕ2 ergibt sich zunachst die Kompaktheit von Dx.
Wegen der gleichmaßigen Stetigkeit der Funktionen ϕ1 und ϕ2 ist
der Rand von Dx eine Nullmenge. Damit sind alle Normalberei-
che Jordan-messbar. In vielen Anwendungen laßt sich der Bereich
D als Vereinigung von endlich vielen Normalbereichen darstellen
(siehe Abb. 5).
11
��������
�������������
�������������
x
y
D1
D3
D2
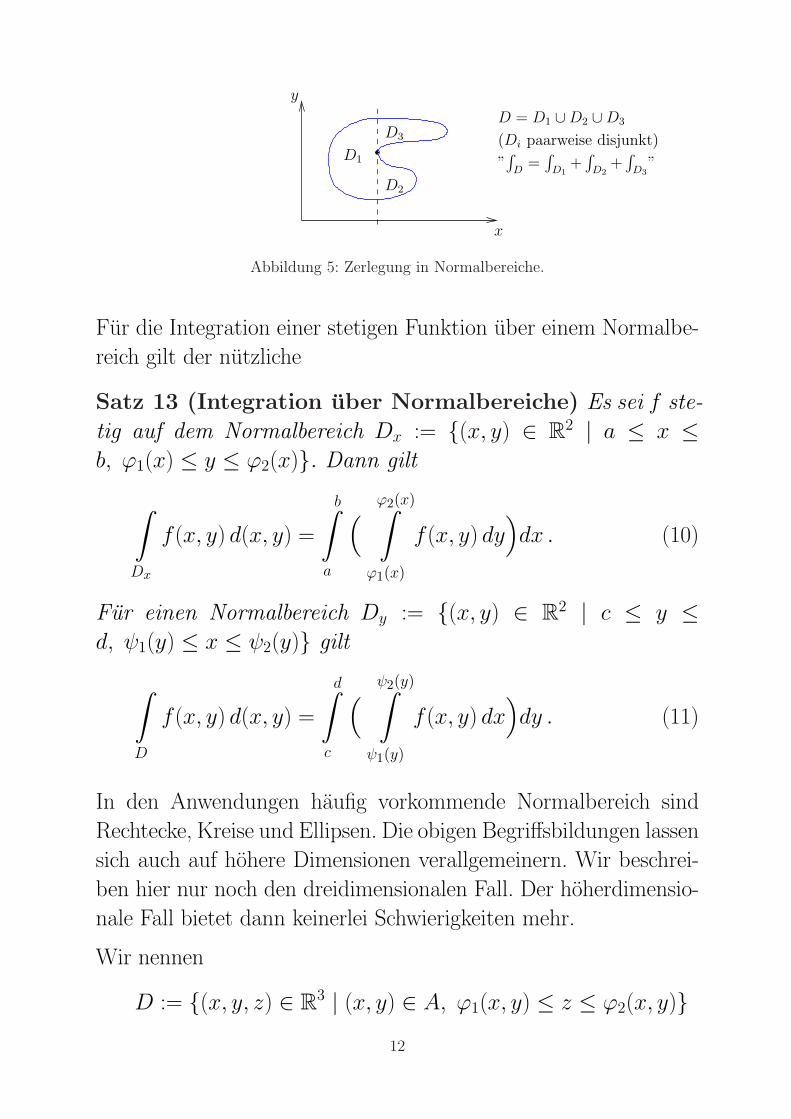
D = D1 ∪D2 ∪D3
(Di paarweise disjunkt)
”´
D=´
D1+´
D2+´
D3”
Abbildung 5: Zerlegung in Normalbereiche.
Fur die Integration einer stetigen Funktion uber einem Normalbe-
reich gilt der nutzliche
Satz 13 (Integration uber Normalbereiche) Es sei f ste-
tig auf dem Normalbereich Dx := {(x, y) ∈ R2 | a ≤ x ≤b, ϕ1(x) ≤ y ≤ ϕ2(x)}. Dann gilt
ˆ
Dx
f (x, y) d(x, y) =
bˆ
a
( ϕ2(x)ˆ
ϕ1(x)
f (x, y) dy)dx . (10)
Fur einen Normalbereich Dy := {(x, y) ∈ R2 | c ≤ y ≤d, ψ1(y) ≤ x ≤ ψ2(y)} gilt
ˆ
D
f (x, y) d(x, y) =
dˆ
c
( ψ2(y)ˆ
ψ1(y)
f (x, y) dx)dy . (11)
In den Anwendungen haufig vorkommende Normalbereich sind
Rechtecke, Kreise und Ellipsen. Die obigen Begriffsbildungen lassen
sich auch auf hohere Dimensionen verallgemeinern. Wir beschrei-
ben hier nur noch den dreidimensionalen Fall. Der hoherdimensio-
nale Fall bietet dann keinerlei Schwierigkeiten mehr.
Wir nennen
D := {(x, y, z) ∈ R3 | (x, y) ∈ A, ϕ1(x, y) ≤ z ≤ ϕ2(x, y)}12
einen Normalbereich bzgl. der xy-Ebene, falls A abgeschlossen und
Jordan-messbar und ϕ1, ϕ2 stetige Funktionen auf A sind. D ist
dann Jordan-messbar und fur jede Funktion f ∈ C0(D,R) gilt
ˆ
D
f (x, y, z) d(x, y, z) =
ˆ
A
( ϕ2(x,y)ˆ
ϕ1(x,y)
f (x, y, z) dz)d(x, y). (12)
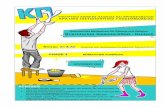
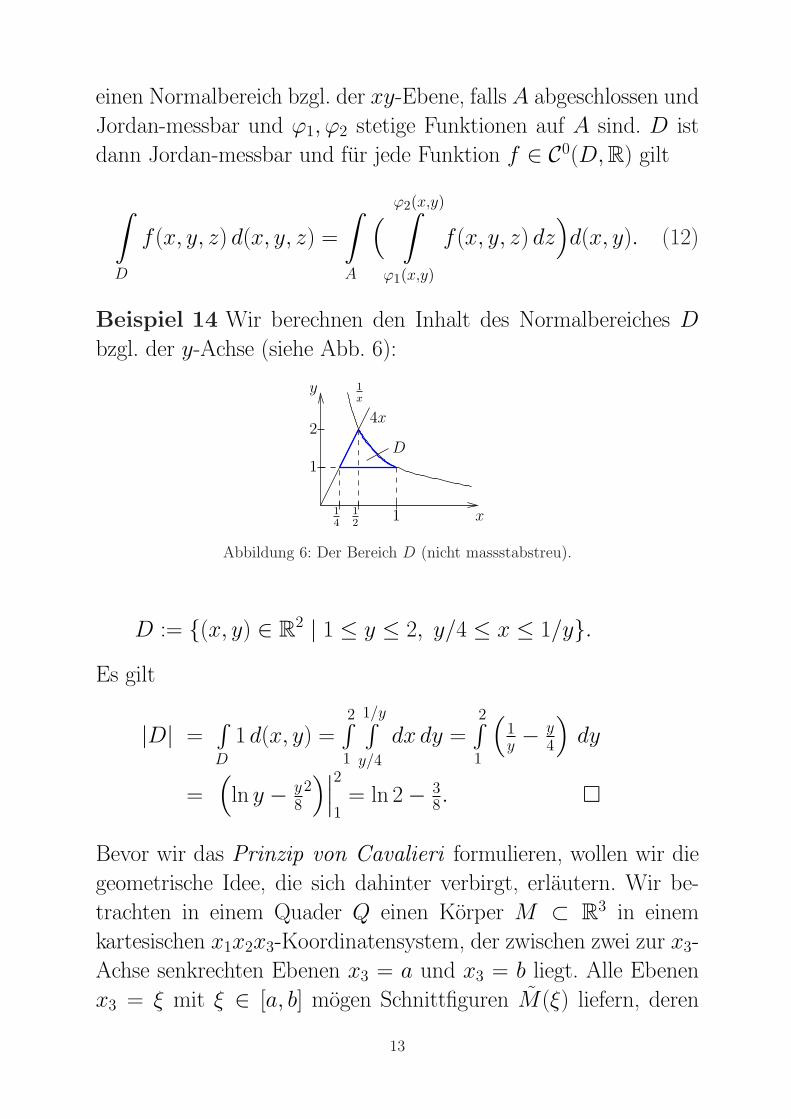
Beispiel 14 Wir berechnen den Inhalt des Normalbereiches D
bzgl. der y-Achse (siehe Abb. 6):
1 x
1
12
14
1x
y
4x
D2
Abbildung 6: Der Bereich D (nicht massstabstreu).
D := {(x, y) ∈ R2 | 1 ≤ y ≤ 2, y/4 ≤ x ≤ 1/y}.Es gilt
|D| =´D
1 d(x, y) =2
1
1/y´y/4
dx dy =2
1
(1y − y
4
)dy
=(ln y − y
82)∣∣∣
2
1= ln 2− 3
8. ¤
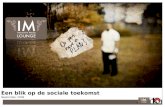
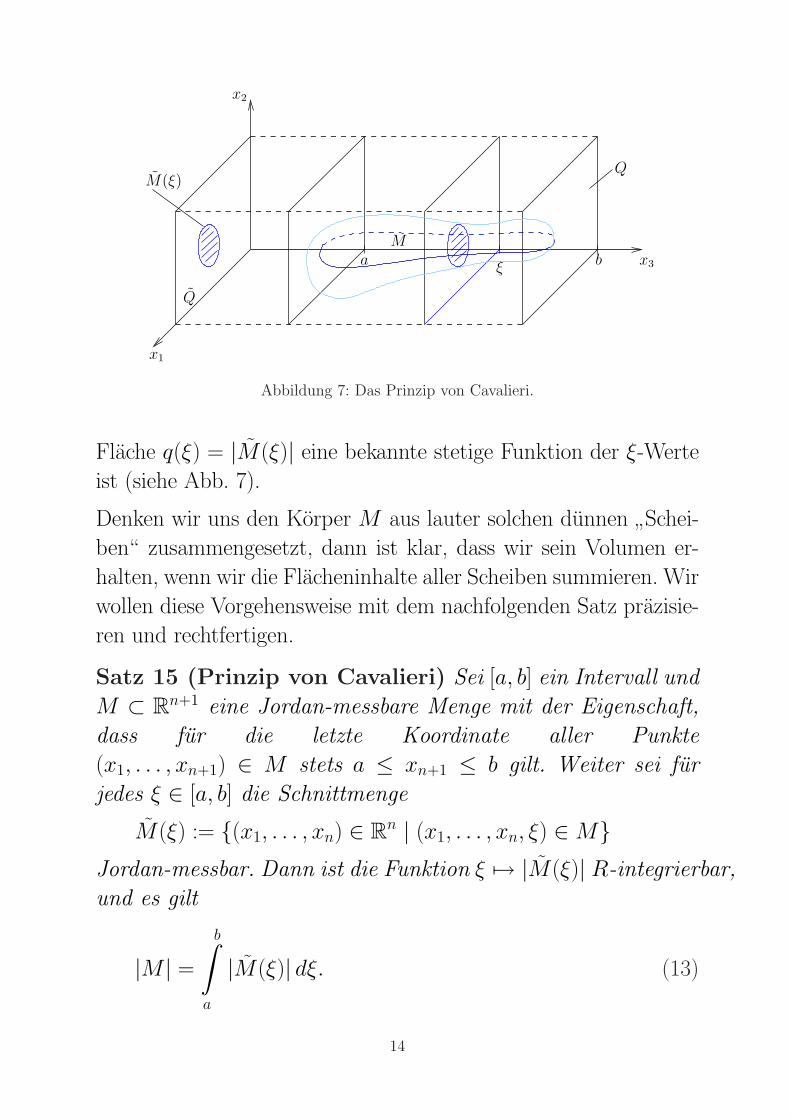
Bevor wir das Prinzip von Cavalieri formulieren, wollen wir die
geometrische Idee, die sich dahinter verbirgt, erlautern. Wir be-
trachten in einem Quader Q einen Korper M ⊂ R3 in einem
kartesischen x1x2x3-Koordinatensystem, der zwischen zwei zur x3-
Achse senkrechten Ebenen x3 = a und x3 = b liegt. Alle Ebenen
x3 = ξ mit ξ ∈ [a, b] mogen Schnittfiguren M(ξ) liefern, deren
13
������������������������������������������������������������
������������������������������������������������������������ �
������������
�������������
���������������������������������������������
���������������������������������������������
�������������
�������������
������������������������������������
������������������������������������
�������������
�������������
��������������������������������
��������������������������������
��������������������������������������
��������������������������������������
���������������
���������������
��������������������������������������
�������������
����������������������������������������������������������
���������������������������������������������
�������������
�������������
����������������������������������������
�����������������������������������������
������������
�������������
������������������������������������
������������������������������������
�������������
�������������
x1
aM
Q
M(ξ)
x2
Q
x3ξ b
Abbildung 7: Das Prinzip von Cavalieri.
Flache q(ξ) = |M(ξ)| eine bekannte stetige Funktion der ξ-Werte
ist (siehe Abb. 7).
Denken wir uns den Korper M aus lauter solchen dunnen”Schei-
ben“ zusammengesetzt, dann ist klar, dass wir sein Volumen er-
halten, wenn wir die Flacheninhalte aller Scheiben summieren. Wir
wollen diese Vorgehensweise mit dem nachfolgenden Satz prazisie-
ren und rechtfertigen.
Satz 15 (Prinzip von Cavalieri) Sei [a, b] ein Intervall und
M ⊂ Rn+1 eine Jordan-messbare Menge mit der Eigenschaft,
dass fur die letzte Koordinate aller Punkte
(x1, . . . , xn+1) ∈ M stets a ≤ xn+1 ≤ b gilt. Weiter sei fur
jedes ξ ∈ [a, b] die Schnittmenge
M(ξ) := {(x1, . . . , xn) ∈ Rn | (x1, . . . , xn, ξ) ∈ M}Jordan-messbar. Dann ist die Funktion ξ 7→ |M(ξ)| R-integrierbar,
und es gilt
|M | =
bˆ
a
|M(ξ)| dξ. (13)
14
Der Satz 15 liefert gleichzeitig auch das folgende Prinzip:
• Zwei Korper haben gleiches Volumen, wenn sie in gleichen
Abstanden von einer festen Ebene flachengleiche Querschnitte
haben.
Variablentransformation in Integralen
Substitutionsregel: Falls g : [a, b] → R eine monoton wachsende
C1-Abbildung und f : g([a, b]) → R integrierbar sind, dann gilt
die Formelˆ
g([a,b])
f (x)dx =
ˆ
[a,b]
f (g(u))|g′(u)|du . (14)
Die Verallgemeinerung dieser Formel wird nun formuliert.
Satz 16 (Transformationssatz fur Integrale) Es sei D ⊂Rn eine offene Menge und g : D → Rn eine injektive C1-
Funktion mit der Eigenschaft det g′(u) 6= 0 fur alle u ∈ D.
Ferner sei A eine kompakte und Jordan-messbare Teilmenge
von D und f eine auf g(A) stetige reellwertige Funktion. Dann
ist g(A) Jordan-messbar, f auf g(A) R-integrierbar und es gilt
ˆ
g(A)
f (x) dx =
ˆ
A
f (g(u))| det g′(u)| du . (15)
Insbesondere ergibt sich fur f ≡ 1 die Formel
|g(A)| =
ˆ
A
| det g′(u)| du . (16)
15

Diese Formel ist auch dann noch gultig, falls det g′(u) nur auf ei-
ner Menge vom Maß Null verschwindet bzw. g nur auf einer Menge
vom Maß Null nicht injektiv ist.
In einem ersten Beispiel zum Satz 16 zeigen wir, wie die Formel
(15) fur Polarkoordinaten arbeitet.
Beispiel 17 (Polarkoordinaten) Die Transformation g von
der rϕ-Ebene in die xy-Ebene ist gegeben durch
x = g1(r, ϕ) := r cos ϕ, y = g2(r, ϕ) := r sin ϕ.
Die Geometrie der Transformation zeigt Abb. 8. Den fruheren Be-
A
g
ra b
α
β
ϕ
r = b
ϕ = β
ϕ = α
y
x
B
αβ
r = b
ϕ = αr=a
ϕ=β
r=a
Abbildung 8: Polarkoordinatentransformation.
zeichnungen x und u entsprechen jetzt (x, y) und (r, ϕ). Durch g
wird die offene Menge
Q := {(r, ϕ) ∈ R2 | r > 0, 0 < ϕ < 2π} (17)
bijektiv auf die offene Menge P = R2\Px abgebildet, wobei
Px := {(x, 0) ∈ R2 | x ≥ 0} ist. Fur die Determinante der Jacobi-
Matrix von g ergibt sich ((r, ϕ) ∈ Q),
det g′(r, ϕ) =∂(x, y)
∂(r, ϕ)=
∣∣∣∣xr xϕ
yr yϕ
∣∣∣∣ =
∣∣∣∣cos ϕ −r sin ϕ
sin ϕ r cos ϕ
∣∣∣∣ = r > 0 .
16
Also ist g auf Q ein Diffeomorphismus. Das ist eine Abbildung,
die in beiden Richtungen stetig differenzierbar ist. Das Bild von
Q = {(r, ϕ) ∈ R2 | r ≥ 0, 0 ≤ ϕ ≤ 2π} ist die gesamte Ebene,
doch ist die Abbildung nicht mehr bijektiv. Beispielsweise ergibt
sich fur den Kreissektor B in Abb. 8 die Formel´B
f (x, y) d(x, y) =´A
f (r cos ϕ, r sin ϕ)∣∣∣∂(x,y)∂(r,ϕ)
∣∣∣ d(r, ϕ)
=β
α
b
a
f (r cos ϕ, r sin ϕ)r dr dϕ.
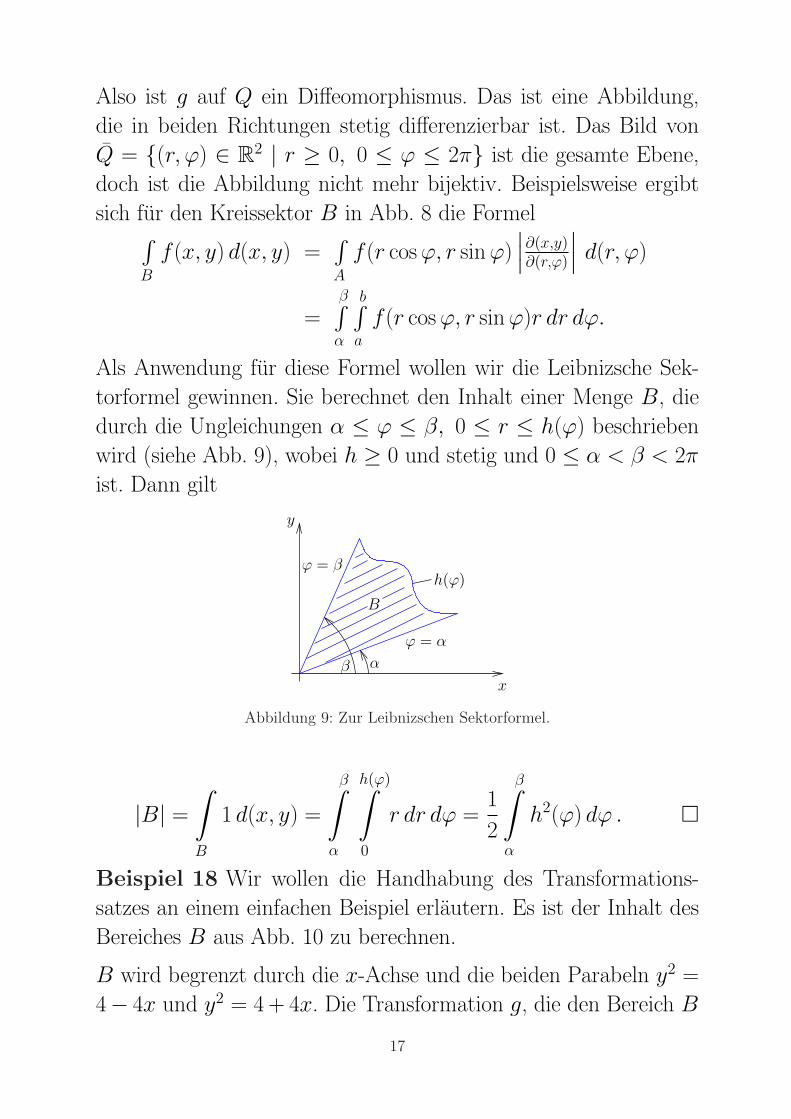
Als Anwendung fur diese Formel wollen wir die Leibnizsche Sek-
torformel gewinnen. Sie berechnet den Inhalt einer Menge B, die
durch die Ungleichungen α ≤ ϕ ≤ β, 0 ≤ r ≤ h(ϕ) beschrieben
wird (siehe Abb. 9), wobei h ≥ 0 und stetig und 0 ≤ α < β < 2π
ist. Dann gilt
α
h(ϕ)
x
y
ϕ = β
B
β
ϕ = α
Abbildung 9: Zur Leibnizschen Sektorformel.
|B| =
ˆ
B
1 d(x, y) =
βˆ
α
h(ϕ)ˆ
0
r dr dϕ =1
2
βˆ
α
h2(ϕ) dϕ . ¤
Beispiel 18 Wir wollen die Handhabung des Transformations-
satzes an einem einfachen Beispiel erlautern. Es ist der Inhalt des
Bereiches B aus Abb. 10 zu berechnen.
B wird begrenzt durch die x-Achse und die beiden Parabeln y2 =
4− 4x und y2 = 4 + 4x. Die Transformation g, die den Bereich B
17

��������
��������
��������
��������
��������
��������
��������
��������������������������������
����������������
A
A1
A2
u
A3(1, 1)
A4
v
B
y
x
x = 1− y2
4
(0, 1)
(0, 0) (1, 0) (−1, 0) (1, 0)
(0, 2)
x = y2
4− 1
Abbildung 10: Zur Anwendung des Transformationssatztes
in das Rechteck A = [0, 1]× [0, 1] uberfuhrt, lautet
(x, y) = g(u, v) = (u2 − v2, 2uv) .
Als Funktionaldeterminante ergibt sich
∂(x, y)
∂(u, v)=
∣∣∣∣∣∣∣
∂x
∂u
∂x
∂v∂y
∂u
∂y
∂v
∣∣∣∣∣∣∣=
∣∣∣∣2u −2v
2v 2u
∣∣∣∣ = 4(u2+v2) > 0, (u, v) 6= (0, 0) .
Fur den Inhalt von B ergibt sich
|B| =´B
1 d(x, y) =´
[0,1]×[0,1]
∣∣∣∣∂(x, y)
∂(u, v)
∣∣∣∣ d(u, v)
= 41
0
1
0
(u2 + v2) dv du = 41
0
(u2 + 1
3
)du = 8
3 . ¤
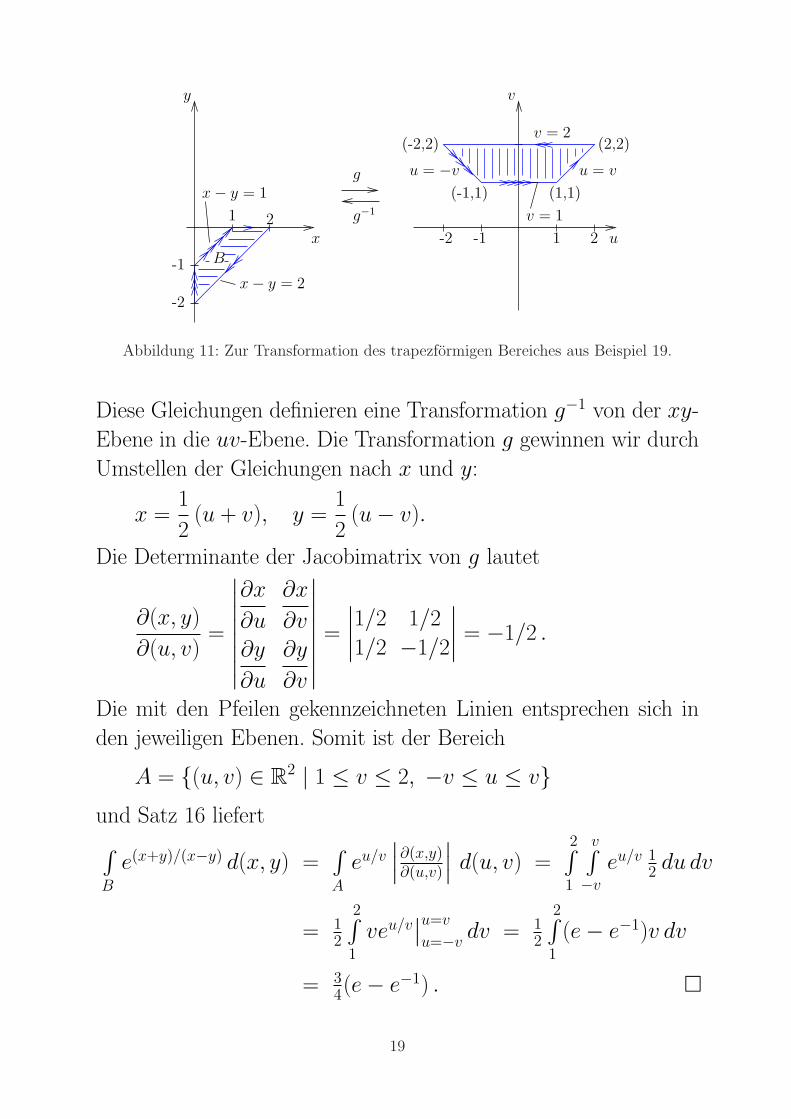
Beispiel 19 Es ist das Integralˆ
B
e(x+y)/(x−y) d(x, y)
uber dem trapezformigen Bereich B mit den Eckpunkten (1, 0), (2, 0),
(0,−2) und (0,−1) (siehe Abb. 11) zu berechnen. Da es nicht leicht
ist, e(x+y)/(x−y) zu integrieren, wird eine Koordinatentransformati-
on durchgefuhrt. Die Bauart des Exponenten der Exponentialfunk-
tion suggeriert folgende Transformation
u = x + y, v = x− y .
18
g
g−1
B
1 2
-1
-2x− y = 2
x
y
x− y = 1
v
(2,2)(-2,2)
(-1,1) (1,1)
u = v
v = 2
v = 1
-1-2 u21
u = −v
Abbildung 11: Zur Transformation des trapezformigen Bereiches aus Beispiel 19.
Diese Gleichungen definieren eine Transformation g−1 von der xy-
Ebene in die uv-Ebene. Die Transformation g gewinnen wir durch
Umstellen der Gleichungen nach x und y:
x =1
2(u + v), y =
1
2(u− v).
Die Determinante der Jacobimatrix von g lautet
∂(x, y)
∂(u, v)=
∣∣∣∣∣∣∣∣
∂x
∂u
∂x
∂v
∂y
∂u
∂y
∂v
∣∣∣∣∣∣∣∣=
∣∣∣∣1/2 1/2
1/2 −1/2
∣∣∣∣ = −1/2 .
Die mit den Pfeilen gekennzeichneten Linien entsprechen sich in
den jeweiligen Ebenen. Somit ist der Bereich
A = {(u, v) ∈ R2 | 1 ≤ v ≤ 2, −v ≤ u ≤ v}und Satz 16 liefert´B
e(x+y)/(x−y) d(x, y) =´A
eu/v∣∣∣∂(x,y)∂(u,v)
∣∣∣ d(u, v) =2
1
v
−v
eu/v 12 du dv
= 12
2
1
veu/v∣∣u=v
u=−vdv = 1
2
2
1
(e− e−1)v dv
= 34(e− e−1) . ¤
19
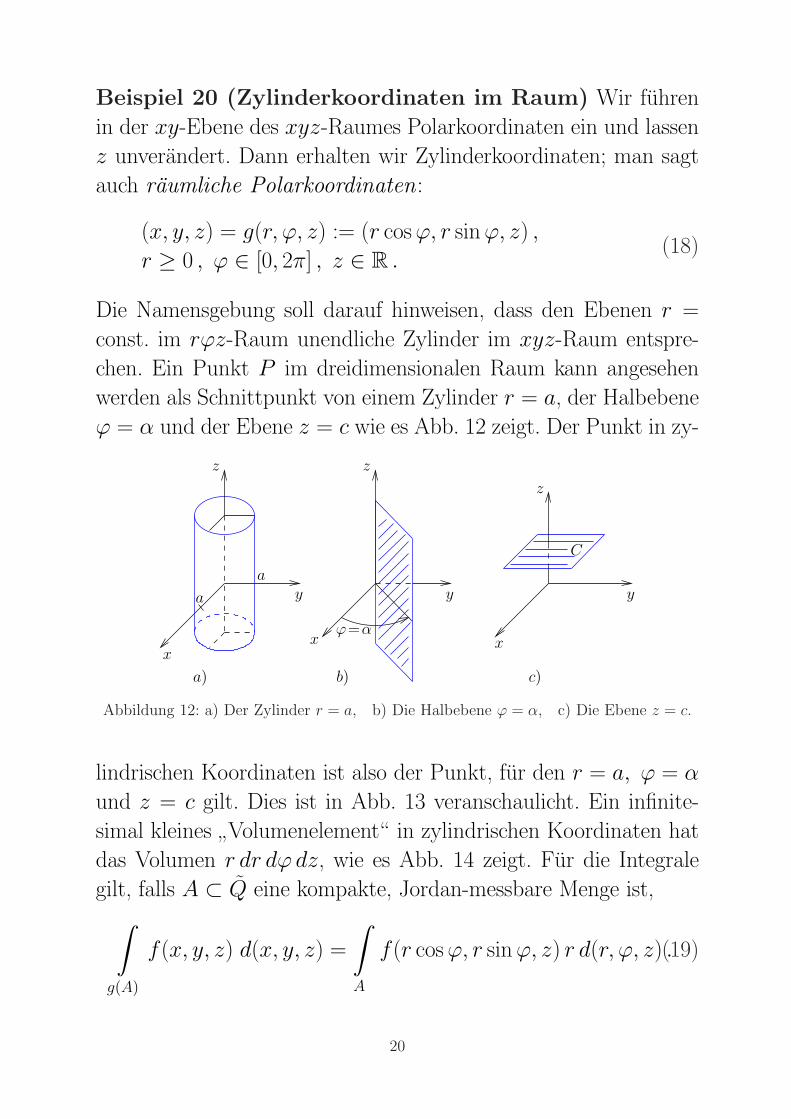
Beispiel 20 (Zylinderkoordinaten im Raum) Wir fuhren
in der xy-Ebene des xyz-Raumes Polarkoordinaten ein und lassen
z unverandert. Dann erhalten wir Zylinderkoordinaten; man sagt
auch raumliche Polarkoordinaten :
(x, y, z) = g(r, ϕ, z) := (r cos ϕ, r sin ϕ, z) ,
r ≥ 0 , ϕ ∈ [0, 2π] , z ∈ R .(18)
Die Namensgebung soll darauf hinweisen, dass den Ebenen r =
const. im rϕz-Raum unendliche Zylinder im xyz-Raum entspre-
chen. Ein Punkt P im dreidimensionalen Raum kann angesehen
werden als Schnittpunkt von einem Zylinder r = a, der Halbebene
ϕ = α und der Ebene z = c wie es Abb. 12 zeigt. Der Punkt in zy-
x
y
z
a
a y
z
x x
y
z
c)b)a)
C
ϕ=α
Abbildung 12: a) Der Zylinder r = a, b) Die Halbebene ϕ = α, c) Die Ebene z = c.
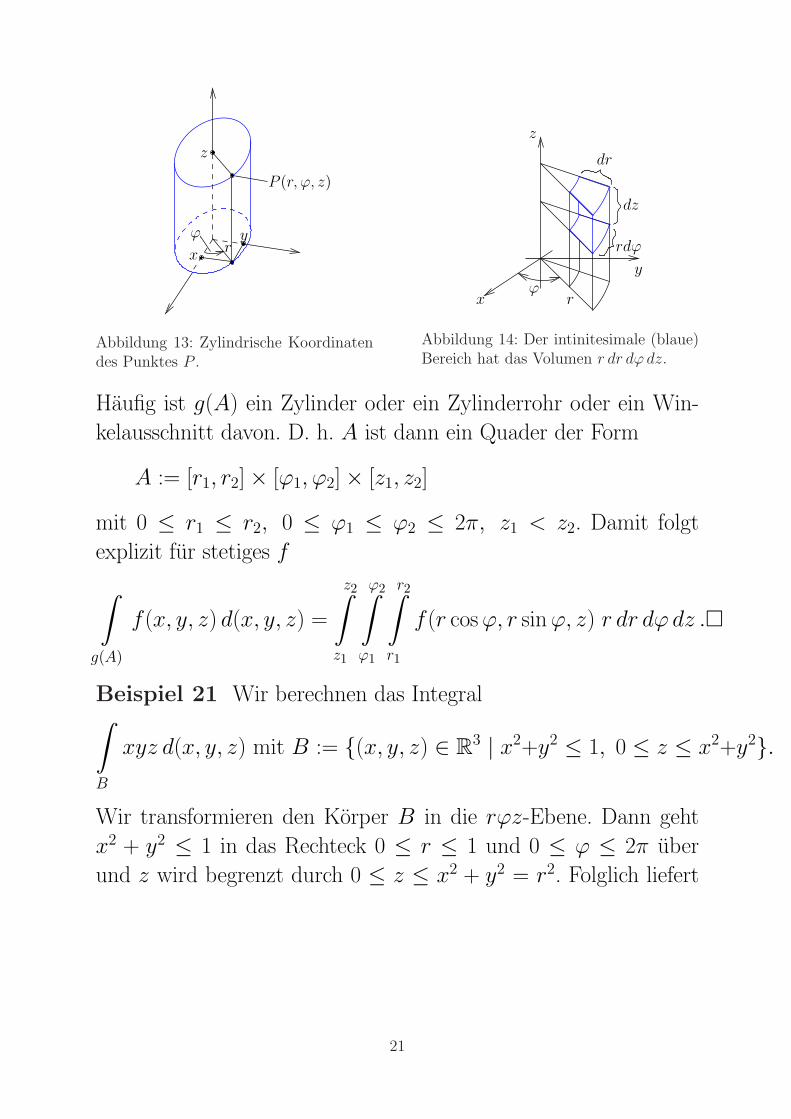
lindrischen Koordinaten ist also der Punkt, fur den r = a, ϕ = α
und z = c gilt. Dies ist in Abb. 13 veranschaulicht. Ein infinite-
simal kleines”Volumenelement“ in zylindrischen Koordinaten hat
das Volumen r dr dϕ dz, wie es Abb. 14 zeigt. Fur die Integrale
gilt, falls A ⊂ Q eine kompakte, Jordan-messbare Menge ist,
ˆ
g(A)
f (x, y, z) d(x, y, z) =
ˆ
A
f (r cos ϕ, r sin ϕ, z) r d(r, ϕ, z) .(19)
20
��������
��������
��������
����
����xy
r
z
ϕ
P (r, ϕ, z)
Abbildung 13: Zylindrische Koordinatendes Punktes P .
xϕ
dz
dr
y
z
rdϕ
r
Abbildung 14: Der intinitesimale (blaue)Bereich hat das Volumen r dr dϕ dz.
Haufig ist g(A) ein Zylinder oder ein Zylinderrohr oder ein Win-
kelausschnitt davon. D. h. A ist dann ein Quader der Form
A := [r1, r2]× [ϕ1, ϕ2]× [z1, z2]
mit 0 ≤ r1 ≤ r2, 0 ≤ ϕ1 ≤ ϕ2 ≤ 2π, z1 < z2. Damit folgt
explizit fur stetiges f
ˆ
g(A)
f (x, y, z) d(x, y, z) =
z2ˆ
z1
ϕ2ˆ
ϕ1
r2ˆ
r1
f (r cos ϕ, r sin ϕ, z) r dr dϕ dz .¤
Beispiel 21 Wir berechnen das Integralˆ
B
xyz d(x, y, z) mit B := {(x, y, z) ∈ R3 | x2+y2 ≤ 1, 0 ≤ z ≤ x2+y2}.
Wir transformieren den Korper B in die rϕz-Ebene. Dann geht
x2 + y2 ≤ 1 in das Rechteck 0 ≤ r ≤ 1 und 0 ≤ ϕ ≤ 2π uber
und z wird begrenzt durch 0 ≤ z ≤ x2 + y2 = r2. Folglich liefert
21
Formel (19)
´B
xyz d(x, y, z) =2π
0
1
0
r2´0
(r cos ϕ)(r sin ϕ) z r dz dr dϕ
=2π
0
1
0
r3 cos ϕ sin ϕ r4
2 dr dϕ =2π
0
cos ϕ sin ϕ16 dϕ
= 132
2π
0
sin 2ϕ dϕ = 0 . ¤
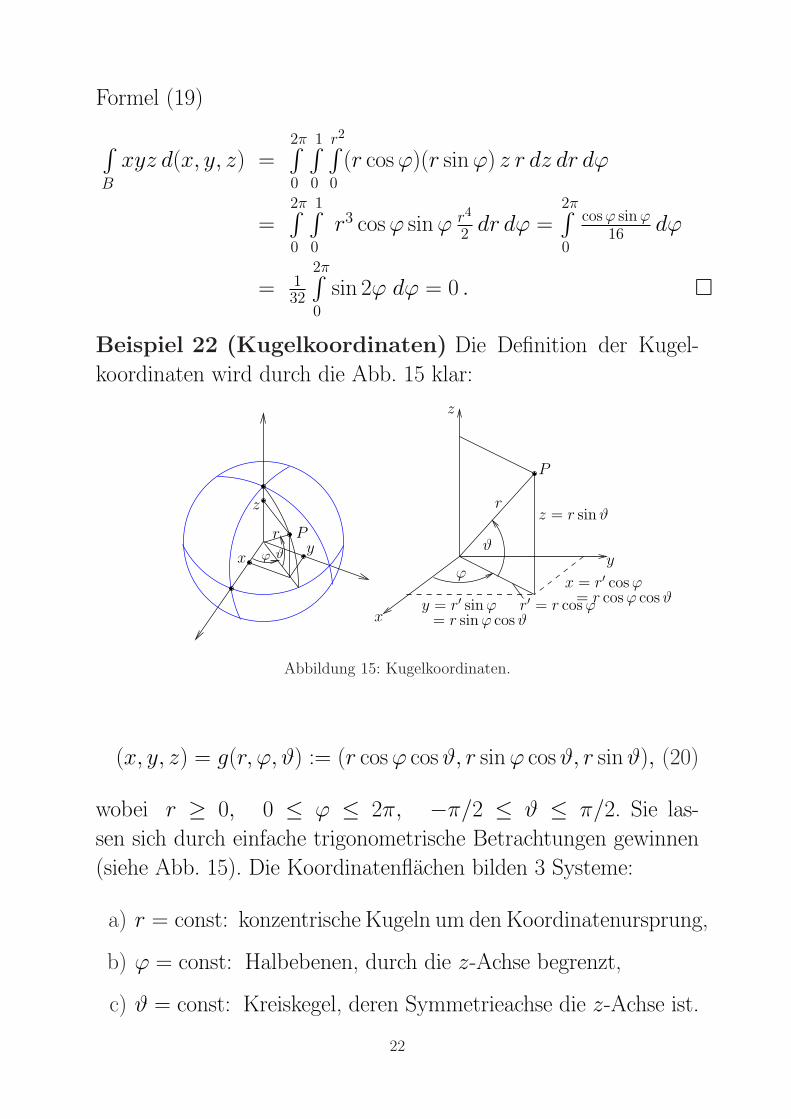
Beispiel 22 (Kugelkoordinaten) Die Definition der Kugel-
koordinaten wird durch die Abb. 15 klar:
��������
��������
����
������
��������
��������
xy
z
Prϑϕ
P
r
ϑ
ϕ
z
x
z = r sin ϑ
y
x = r′ cos ϕ= r cos ϕ cos ϑy = r′ sin ϕ
= r sin ϕ cos ϑr′ = r cos ϕ
Abbildung 15: Kugelkoordinaten.
(x, y, z) = g(r, ϕ, ϑ) := (r cos ϕ cos ϑ, r sin ϕ cos ϑ, r sin ϑ), (20)
wobei r ≥ 0, 0 ≤ ϕ ≤ 2π, −π/2 ≤ ϑ ≤ π/2. Sie las-
sen sich durch einfache trigonometrische Betrachtungen gewinnen
(siehe Abb. 15). Die Koordinatenflachen bilden 3 Systeme:
a) r = const: konzentrische Kugeln um den Koordinatenursprung,
b) ϕ = const: Halbebenen, durch die z-Achse begrenzt,
c) ϑ = const: Kreiskegel, deren Symmetrieachse die z-Achse ist.
22
Die Determinante der Jacobimatrix von g ergibt sich aus
det g′(r, ϕ, ϑ) =
∣∣∣∣∣∣∣∣
cos ϕ cos ϑ −r sin ϕ cos ϑ −r cos ϕ sin ϑ
sin ϕ cos ϑ r cos ϕ cos ϑ −r sin ϕ sin ϑ
sin ϑ 0 r cos ϑ
∣∣∣∣∣∣∣∣= r2 cos ϑ .
Die Funktionaldeterminante von g ist positiv, falls r > 0 und
ϑ ∈ (−π/2, π/2). Deuten wir r, ϕ, ϑ als kartesische Koordinaten,
dann sieht man, dass bei stetigem f die Transformationsformel
(15)ˆ
B
f (x, y, z) d(x, y, z)
=
ˆ
A
f (r cos ϕ cos ϑ, r sin ϕ cos ϑ, r sin ϑ) r2 cos ϑ d(r, ϕ, ϑ)
(21)
dann gilt, wenn A eine kompakte, Jordan-messbare Teilmenge des
Gebietes
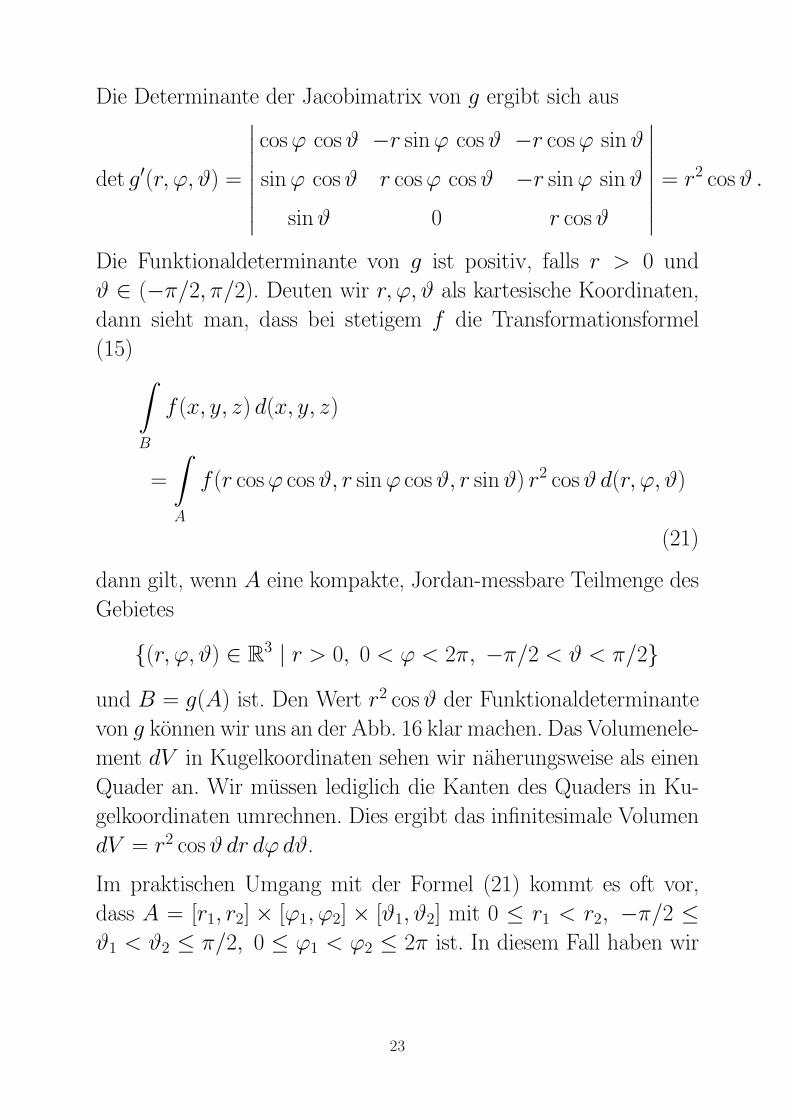
{(r, ϕ, ϑ) ∈ R3 | r > 0, 0 < ϕ < 2π, −π/2 < ϑ < π/2}und B = g(A) ist. Den Wert r2 cos ϑ der Funktionaldeterminante
von g konnen wir uns an der Abb. 16 klar machen. Das Volumenele-
ment dV in Kugelkoordinaten sehen wir naherungsweise als einen
Quader an. Wir mussen lediglich die Kanten des Quaders in Ku-
gelkoordinaten umrechnen. Dies ergibt das infinitesimale Volumen
dV = r2 cos ϑ dr dϕ dϑ.
Im praktischen Umgang mit der Formel (21) kommt es oft vor,
dass A = [r1, r2] × [ϕ1, ϕ2] × [ϑ1, ϑ2] mit 0 ≤ r1 < r2, −π/2 ≤ϑ1 < ϑ2 ≤ π/2, 0 ≤ ϕ1 < ϕ2 ≤ 2π ist. In diesem Fall haben wir
23

x
z
ϕ
y
drrdϕ
r′dϑ = r cos ϑdϑ
π2− ϑ
Abbildung 16: Der infinitesimale (blaue) Bereich hat das Volumen r2 cos ϑ dr dϕ dϑ.
die besonders einfache Form der Transformationsformelˆ
B
f (x, y, z) d(x, y, z)
=
ϑ2ˆ
ϑ1
ϕ2ˆ
ϕ1
r2ˆ
r1
f (r cos ϕ cos ϑ, r sin ϕ cos ϑ, r sin ϑ) r2 cos ϑ dr dϕ dϑ.
(22)
Die Reihenfolge der Integrationen ist unerheblich. ¤
24