Discussion of ABC talk by Stefano Cabras, Padova, March 21, 2013
Upload
robin-ryderCategory
view
123download
0
Introduction aux methodes ABC (Approximate BayesianComputation)
Robin Ryder
CEREMADE, Universite Paris-Dauphine
26 fevrier 2013GT Statistiques de Jussieu
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 1 / 36

Cadre bayesien
Contexte : inference bayesienne
Donnees observees y ; on cherche a estimer un parametre θ.
Distribution a posteriori π(θ|y) ∝ π(θ)f (y|θ).
En general, on a une fonction integrable h et on cherche a estimer
Ih =
∫h(θ)π(θ|y)dθ
Estimation par Monte-Carlo : on simule θ1, . . . , θn selon π(θ|y) et onutilise
Ih =1
n
∑h(θi )
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 2 / 36

Simulation selon la distribution a posteriori
On a donc besoin de simuler selon la distribution a posteriori π(θ|y)
Pour utiliser les methodes classiques (MCMC...), il faut etre enmesure de calculer π(θ|y) a une constante pres en tout point θ.
Probleme : que faire quand ce calcul est impossible ou trop couteux ?
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 3 / 36

Solution : Approximate Bayesian Computation
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 4 / 36

Contexte
Cible : π(θ|y) ∝ π(θ)f (y|θ)
Vraisemblance f (y|θ) difficile ou impossible a calculer.
Mais facile de simuler un nouveau jeu de donnees d’apres le modele :z ∼ f (z|θ)
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 5 / 36

Approximate Bayesian Computation
Algorithm 1 Acceptation-rejet bayesien sans vraisemblance
1: for t = 1 to T do2: Tirer θt ∼ π(·)3: Simuler des donnees z ∼ f (·|θt)4: if z = y then5: accepter θt6: else7: rejeter θt .8: end if9: end for
(Tavare et al., 1997)On obtient un echantillon (de taille � T ) suivant exactement π(θ|y).
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 6 / 36

Approximate Bayesian Computation
Algorithm 1 Acceptation-rejet bayesien sans vraisemblance
1: for t = 1 to T do2: Tirer θt ∼ π(·)3: Simuler des donnees z ∼ f (·|θt)4: if z = y then5: accepter θt6: else7: rejeter θt .8: end if9: end for
(Tavare et al., 1997)On obtient un echantillon (de taille � T ) suivant exactement π(θ|y).
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 6 / 36

Algorithme exact
La preuve est evidente :
f (θi ) ∝∑z∈D
π(θi )f (z|θi )Iz=y
∝ π(θi )f (y|θi )= π(θi |y)
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 7 / 36

Approximate Bayesian Computation
L’evenement z = y est de probabilite tres faible, et de probabilite 0 lorsquela v.a. est continue. On remplace donc l’egalite stricte par une zone detolerance :
Algorithm 2 Approximate Bayesian Computation
1: Definir un seuil de tolerance ε > 0 et une distance ρ.2: for t = 1 to T do3: Tirer θt ∼ π(·)4: Simuler des donnees z ∼ f (·|θt)5: if ρ(z, y) < ε then6: accepter θt7: else8: rejeter θt9: end if
10: end for
(Pritchard et al., 1999)
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 8 / 36

Distribution approchee
On obtient ainsi un echantillon depuis la distribution
πABCε = π(θ)Pθ[ρ(z, y) < ε] = π(θ|ρ(z, y) < ε)
Lorsque ε→ 0, cela correspond a la distribution a posteriori.Lorsque ε→∞, cela correspond a la distribution a priori.Petites valeurs de ε⇒ bonne approximation, faible taux d’acceptation.Grandes valeurs de ε⇒ moins bonne approximation, taux d’acceptationplus eleve.En pratique, on ne choisit pas ε a l’avance : on prend pour ε un petitquantile du vecteur des distances.
Questions :
1 Choix de ε
2 Choix de ρ
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 9 / 36

Distribution approchee
On obtient ainsi un echantillon depuis la distribution
πABCε = π(θ)Pθ[ρ(z, y) < ε] = π(θ|ρ(z, y) < ε)
Lorsque ε→ 0, cela correspond a la distribution a posteriori.Lorsque ε→∞, cela correspond a la distribution a priori.Petites valeurs de ε⇒ bonne approximation, faible taux d’acceptation.Grandes valeurs de ε⇒ moins bonne approximation, taux d’acceptationplus eleve.En pratique, on ne choisit pas ε a l’avance : on prend pour ε un petitquantile du vecteur des distances.Questions :
1 Choix de ε
2 Choix de ρ
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 9 / 36

Exemple : MA(2)
Un processus MA(q) est une serie temporelle (yk)k∈N∗ definie par
yk = uk +
q∑i=1
θiuk−i uk ∼iid N (0, 1)
On considere un processus MA(2) et on cherche a simuler selon ladistribution a posteriori de θ = (θ1, θ2).Comme distribution a priori, on prend la loi uniforme sur l’ensemble desvaleurs identifiables de θ, qui est le triangle
−2 < θ1 < 2 θ1 + θ2 > −1 θ1 − θ2 < 1.
(Marin, Pudlo, Robert & RR 2012)
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 10 / 36

Exemple : MA(2)
n = 50 observations d’un processus MA(2).
On tire T = 106 valeurs de θ.
ε : quantile a 1%, 0.1%, 0.01%.
ρ(z, y) =√∑n
k=1(yk − zk)2
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 11 / 36

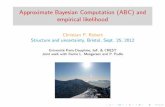
Exemple : MA(2)
−2 −1 0 1 2
−1.
0−
0.5
0.0
0.5
1.0
θ1
θ 2
−2 −1 0 1 2
−1.
0−
0.5
0.0
0.5
1.0
θ1
θ 2
−2 −1 0 1 2
−1.
0−
0.5
0.0
0.5
1.0
θ1
θ 2Figure: De gauche a droite, ε = quantile a 1%, 0.1%, 0.01%. Noir : niveaux dela densite cible.
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 12 / 36

Estimation de la densite
−2 −1 0 1 2
0.0
1.0
2.0
3.0
θ1
−1.0 0.0 0.5 1.0
0.0
1.0
2.0
3.0
θ2
Figure: Gauche : θ1, droite : θ2 ; ε : quantile a 1% (bleu), 0.1% (rouge), 0.01%(vert). En noir, la densite cible π(·|y).
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 13 / 36

Approximation supplementaire
En general, on ne considere pas ρ(z, y), mais on se restreint a unestatistique resumee S de nos donnees :
Algorithm 3 Approximate Bayesian Computation
1: Definir un seuil de tolerance ε > 0, une statistique resumee S et unedistance ρ.
2: for t = 1 to T do3: Tirer θt ∼ π(·)4: Simuler des donnees z ∼ f (·|θt)5: if ρ(S(z),S(y)) < ε then6: accepter θt7: else8: rejeter θt .9: end if
10: end for
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 14 / 36

Resultat
On obtient un echantillon suivant la loi marginale en θ de
πABCε,S (θ, z|y) =π(θ)f (z|θ)IAε,y(z)∫
Aε,y×Θ π(θ)f (z|θ) dzdθ
ou Aε,S = {z ∈ D : ρ(S(z),S(y) < ε}.On espere que
πABCε,S (θ|y) ' π(θ|y)
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 15 / 36

Approximations
On a 3 niveaux d’approximation :
1 Utilisation d’une statistique resumee S potentiellement non-exhaustive :π(θ|S(y)) 6= π(θ|y)
2 Utilisation d’un seuil de tolerance ε > 0 : πABCS ,ε (θ|S(y)) 6= π(θ|S(y))
3 Erreur Monte-Carlo : echantillon de taille finie (faible tauxd’acceptation)
Quand on diminue l’erreur 2, on augmente soit l’erreur 3, soit le temps decalcul.
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 16 / 36

Approximations
On a 3 niveaux d’approximation :
1 Utilisation d’une statistique resumee S potentiellement non-exhaustive :π(θ|S(y)) 6= π(θ|y)
2 Utilisation d’un seuil de tolerance ε > 0 : πABCS ,ε (θ|S(y)) 6= π(θ|S(y))
3 Erreur Monte-Carlo : echantillon de taille finie (faible tauxd’acceptation)
Quand on diminue l’erreur 2, on augmente soit l’erreur 3, soit le temps decalcul.
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 16 / 36

Exemple : MA(2)
50 observations d’un processus MA(2).
On tire T = 106 valeurs de θ.
Statistique resumee : autocorrelations d’ordres 1 et 2 ;τj =
∑nk=j+1 ykyk−j
ε : quantile a 1%, 0.1%, 0.01%.
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 17 / 36

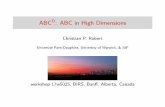
Exemple : MA(2)
−2 −1 0 1 2
−1.
0−
0.5
0.0
0.5
1.0
θ1
θ 2
−2 −1 0 1 2
−1.
0−
0.5
0.0
0.5
1.0
θ1
θ 2
−2 −1 0 1 2
−1.
0−
0.5
0.0
0.5
1.0
θ1
θ 2Figure: Statistique resumee : autocorrelations. De gauche a droite, ε = quantilea 1%, 0.1%, 0.01%.
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 18 / 36

Estimation de la densite
−2 −1 0 1 2
0.0
1.0
2.0
3.0
θ1
−1.0 0.0 0.5 1.0
0.0
1.0
2.0
3.0
θ2
Figure: Gauche : θ1, droite : θ2 ; ε : quantile a 1% (bleu), 0.1% (rouge), 0.01%(vert). En noir, la densite cible π.
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 19 / 36

La statistique resumee est essentielle
Du point de vue ABC, les donnees completes sont assez peu informativessur les parametres. On peut perdre de l’information ( !) en utilisant lesdonnees completes plutot qu’une statistique resumee meme nonexhaustive.A partir de maintenant, on ignorera parfois la dependance en la statistiqueresumee S dans les notations : ρ′(z, y) = ρ(S(z), S(y)). Dans les exemples,on utilisera la distance entre autocorrelations et non la distance brute.
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 20 / 36

Choix des statistiques resumees
En general, il n’y a pas de statistique exhaustive disponible. La question sepose donc de la construction des statistiques, et du choix des statistiques ainclure.Joyce & Marjoram (2008), a partir d’un large ensemble de statistiques :inclusion sequentielle, et ”rapport de vraisemblances” pour deciderd’inclure ou non chaque statistique.Plusieurs problemes. Principalement : d’ou vient le large ensemble destatistiques ?
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 21 / 36

Semi-automatic ABC
Fernhead & Prangle (2012 + commentaires JRSSB) : le ”meilleur” resumeest l’esperance a posteriori des parametres.
a ABC pilote pour determiner la region d’interet
b Simulation de couples (θ, z) dans cette region
c Creation de statistiques resumees (par regression lineaire) a l’aide de cescouples
d ABC avec ces statistiques
ABC ”calibre”.Probabilite d’acceptation :
p(z) =
∫p(θ|z)π(θ)dλ = π(z)εd + o(εd)
avec d la dimension de la statistique resumee
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 22 / 36

Statistiques en pratique
En pratique, les statistiques resumees sont souvent choisies demaniere intuitive
Ce choix est ensuite valide par ex. par verification sur des donneessimulees (DIY ABC, Cornuet et al. 2008)
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 23 / 36

ABC-MCMC
Plus efficace : ne pas simuler directement depuis la prior π(·)
Algorithm 4 ABC-MCMC
1: Generer par ABC standard une realisation (θ(0), z(0)) de la cibleπABC (θ, z|y)
2: for t = 1 to T do3: Tirer θ′ selon le noyau markovien q(·|θ(t−1))4: Simuler des donnees z′ ∼ f (·|θ′)5: Tirer u selon U([0, 1])
6: if u ≤ π(θ′)q(θ(t−1)|θ′)π(θ(t−1))q(θ′|θ(t−1))
et ρ(z′, y) ≤ ε then
7: poser (θ(t), z(t)) = (θ′, z′)8: else9: (θ(t), z(t)) = (θ(t−1), z(t−1)),
10: end if11: end for
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 24 / 36

ABC-MCMC : preuve
Si on considere le couple (θ, z), on a construit un MCMC de noyau detransition (θ′, z′) ∼ q(θ′|θ(t−1))× f (z|θ′) et
πABC (θ′, z′|y)
πABC (θ(t−1), z(t−1)|y)× q(θ[t−1)|θ′)f (z(t−1)|θ(t−1))
q(θ′|θ(t−1))f (z′|θ′)
=π(θ′)f (z′|θ′)IAε,y(z′)
π(θ(t−1))f (z(t−1)|θ(t−1))IAε,y(z(t−1))
×q(θ(t−1)|θ′)f (z(t−1)|θ(t−1))
q(θ′|θ(t−1))f (z′|θ′)
=π(θ′)q(θ(t−1)|θ′)
π(θ(t−1))q(θ′|θ(t−1))IAε,y(z′)
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 25 / 36

ABC-MCMC : preuve
Si on considere le couple (θ, z), on a construit un MCMC de noyau detransition (θ′, z′) ∼ q(θ′|θ(t−1))× f (z|θ′) et
πABC (θ′, z′|y)
πABC (θ(t−1), z(t−1)|y)× q(θ[t−1)|θ′)f (z(t−1)|θ(t−1))
q(θ′|θ(t−1))f (z′|θ′)
=π(θ′)���
�f (z′|θ′)IAε,y(z′)
π(θ(t−1))((((((((f (z(t−1)|θ(t−1))���
���IAε,y(z(t−1))
×q(θ(t−1)|θ′)((((((((
f (z(t−1)|θ(t−1))
q(θ′|θ(t−1))����f (z′|θ′)
=π(θ′)q(θ(t−1)|θ′)
π(θ(t−1))q(θ′|θ(t−1))IAε,y(z′)
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 25 / 36

ABC-MCMC : preuve
Si on considere le couple (θ, z), on a construit un MCMC de noyau detransition (θ′, z′) ∼ q(θ′|θ(t−1))× f (z|θ′) et
πABC (θ′, z′|y)
πABC (θ(t−1), z(t−1)|y)× q(θ[t−1)|θ′)f (z(t−1)|θ(t−1))
q(θ′|θ(t−1))f (z′|θ′)
=π(θ′)���
�f (z′|θ′)IAε,y(z′)
π(θ(t−1))((((((((f (z(t−1)|θ(t−1))���
���IAε,y(z(t−1))
×q(θ(t−1)|θ′)((((((((
f (z(t−1)|θ(t−1))
q(θ′|θ(t−1))����f (z′|θ′)
=π(θ′)q(θ(t−1)|θ′)
π(θ(t−1))q(θ′|θ(t−1))IAε,y(z′)
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 25 / 36

ABC-PMC
Algorithm 5 PMCMC sans vraisemblance
1: A l’iteration t = 1,2: for i = 1 to N do3: repeat4: Simuler θ
(1)i ∼ π(θ) et z ∼ f (z | θ(1)
i )5: until ρ(S(z),S(y)) ≤ ε1
6: Poser ω(1)i = 1/N
7: end for8: Prendre pour Σ1 deux fois la variance empirique des θ
(1)i
9: for t = 2 to T do10: for i = 1 to N do11: repeat12: Tirer θ?i parmi les θ
(t−1)j avec probabilites ω
(t−1)j
13: Simuler θ(t)i ∼ N (θ?i ,Σt−1) et z ∼ f (z | θ(t)
i )14: until ρ(S(z),S(y)) ≤ εt15: Poser ω
(t)i ∝ π(θ
(t)i )/
∑Nj=1 ω
(t−1)j ϕ
{Σ
−1/2t−1
(θ
(t)i − θ
(t−1)j
)}16: end for17: Prendre pour Σt deux fois la variance empirique des θ
(t)i
18: end forRobin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 26 / 36

Post-processing d’ABC
Beaumont et al. (2002) : on garde l’algorithme inchange, mais on modifiela sortie. On remplace θ par
θ∗ = θ − (S(z)− S(y))T β
ou β provient d’une regression ponderee de θ sur S(z)− S(y), avec despoids de la forme
Kδ(S(z)− S(y))
ou Kδ est un noyau de largeur δ.
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 27 / 36

Exemple : MA(2)
Memes sorties que precedemment
ε = quantile a 0.1% puis a 20%
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 28 / 36

MA(2) avec post-processing (1)
−2 −1 0 1 2
0.0
0.5
1.0
1.5
2.0
θ1
−2 −1 0 1 2
0.0
0.5
1.0
1.5
2.0
θ2
Figure: Estimation de la densite de θ1 (droite) et θ2 (gauche) ; ε =quantile a0.1%. Bleu : sans post-processing ; rouge : avec post-processing ; noir : cible.
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 29 / 36

MA(2) avec post-processing (2)
−2 −1 0 1 2
0.0
0.5
1.0
1.5
2.0
θ1
−2 −1 0 1 2
0.0
0.5
1.0
1.5
2.0
θ2
Figure: Estimation de la densite de θ1 (droite) et θ2 (gauche) ; ε =quantile a20%. Bleu : sans post-processing ; rouge : avec post-processing ; noir : cible.
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 30 / 36

Choix de modele
Pour k modeles, on considere eventuellement S(z) = (S1(z), . . . ,Sk(z)).
Algorithm 6 ABC pour choix de modele
1: for t = 1 to T do2: Tirer un modele mt ∈ {1, . . . , k} de l’a priori π(M = mt)3: Tirer θt ∼ πm(·)4: Simuler des donnees z ∼ fm(·|θt)5: if ρ(S(z),S(y)) < ε then6: accepter (mt , θt)7: else8: rejeter (mt , θt).9: end if
10: end for
L’estimation ABC de la probabilite a posteriori du modele m est :
π(M = m|y) ≈ 1
n
n∑t=1
Imt=m
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 31 / 36

Exemple : MA(2)
Choix entre MA(1) et MA(2)
Donnees provenant d’un MA(2)
Facteur de Bayes B21 = 17.71 ; P[M = 2|y] = 95% ;P[M = 1|y] = 5%
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 32 / 36

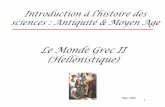
Facteur de Bayes
1 2
0.0
0.2
0.4
0.6
0.8
1.0
1 2
0.0
0.2
0.4
0.6
0.8
1.0
1 2
0.0
0.2
0.4
0.6
0.8
1.0
1 2
0.0
0.2
0.4
0.6
0.8
1.0
Figure: Probabilite a posteriori des modeles MA(1) et MA(2) pour ε = quantilesa 10, 1, 0.1, 0.01%. La vraie valeur des probabilites est 5%/95%.
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 33 / 36

Choix de modele : problemes
Meme si Sm est une statistique exhaustive pour θ dans le modele mpour tout m, la concatenation des statistiques (S1, . . . ,Sk) n’est pasforcement une statistique exhaustive pour le couple (m, θ).
En general, on n’a pas d’estimateur convergent du facteur de Bayes.
Cas particulier : famille exponentielle.
(ABC in London 2012)
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 34 / 36

Conclusions
Tres peu de resultats theoriques utiles sur la convergence
Controle de l’erreur seulement de facon empirique
Pragmatisme : ABC ou rien !
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 35 / 36

Questions ?
Robin Ryder (Dauphine) Introduction a ABC Jussieu 26/02/13 36 / 36