Duster: XD 44X - ae440a2009 / FrontPageae440a2009.pbworks.com/f/X-Duster.pdfDAPCA IV –Development...
78
AE 440: Conceptual Design Report for the Agricultural Unmanned Aircraft System X‐Duster: XD‐44X Aerodynamics and Team Leader: Timothy Lingner Configuration: Matthew Fuesz Cost and Components: Wesley Hammes Performance: Timothy Farber Propulsion: Kyle Poycker Stability and Control: Christopher Kelley Structures: Michael Duffy 11/16/2007
-
Upload
dinhkhuong -
Category
Documents
-
view
221 -
download
3
Transcript of Duster: XD 44X - ae440a2009 / FrontPageae440a2009.pbworks.com/f/X-Duster.pdfDAPCA IV –Development...

AE 440: Conceptual Design Report for the Agricultural Unmanned Aircraft System
X‐Duster: XD‐44X
Aerodynamics and Team Leader: Timothy Lingner Configuration: Matthew Fuesz Cost and Components: Wesley Hammes Performance: Timothy Farber Propulsion: Kyle Poycker Stability and Control: Christopher Kelley Structures: Michael Duffy
11/16/2007

Table of Contents Section Page Nomenclature...............................................................................................................................2
Executive Summary.....................................................................................................................3
1. Initial Design Down‐selection……………………………………………………………..4
2. Configuration………………………………………………………………………………...6
3. Structures…………………………………………………………………………………….18
4. Initial Sizing and Constraint Analysis…………………………………………………..27
5. Performance…………………………………………………………………………………34
6. Aerodynamics……………………………………………………………………………….39
7. Propulsion…………………………………………………………………………………...47
8. Stability and Control……………………………………………………………………….54
9. Cost………………………………………………………………………...............................62
10. Ground Operations………………………………………………………………………..66
Conclusion
References
Appendix
A.1 Structures V‐n & Trim Diagram MATLAB Code
A.2 Stability and Control: Equations Used
A.3 Thrust vs. Velocity Curve and Propeller
A.4 Aerodynamic Equations
1

Nomenclature 100LL -100 Low Lead α – angle of attack αCLmax – angle of attack at the maximum lift coefficient Aeffective – effective aspect ratio AR – Aspect Ratio BWB – blended wing body Cbhp – propeller specific fuel consumption CD – Drag coefficient CDi – Induced drag doefficient CDmin – minimum drag coefficient CD0 – Zero-lift drag coefficient CER – Cost Estimation Relation Cf – chord length of flap
htc - Horizontal tail volume ratio CL – Lift coefficient CLα – Wing lift-curve slope CLαh – Horizontal Tail Lift Curve Slope CL,max – Maximum lift coefficient CM – Moment Coefficent
0MC - Zero lift Moment Coefficient
wMCα
- Moment slope as function of angle of
attack of wing vtc - Vertical tail volume ratio
δflap – flap deflection angle hαα
∂∂
-Horizontal Tail Downwash Derivative
DAPCA IV –Development and Procurement Costs of Aircraft IV
oε - Downwash angle on elevator E – Young’s modulus e – Oswald’s efficiency factor F – fuselage lift factor FF – component form factor G – Shear modulus gal – gallon gph – gallons per hour η – airfoil efficiency factor ηh – horizontal tail efficiency
hr – hour K – drag-due-to-lift factor Λmax t – sweep of the wing at the chord location l – characteristic length lbf – pound force lt – distance between aerodynamic chords lv – distance between aerodynamic chords (L/D) – Lift to Drag ratio μ – viscosity of air M – Mach number min – minute n – load factor P/W – power to weight ratio ρ – density of air R – Reynolds number RFP – Request For Proposal rpm – revolutions per minute S – Planform Wing Area Se – Reference area of each elevator SFC – Specific Fuel Consumption Sh – Reference area of horizontal stabilizer
.S M .- Static Margin Sr – Reference area of rudder Sref – Reference area Sv – Reference area of vertical tail TOGW – Takeoff Gross Weight TSFC – thrust specific fuel consumption (T/W) – Thrust to Weight ratio V – velocity We – Empty weight Wf – Fuel weight W0 – Takeoff Gross Weight (W/S) – Wing loading
achx - Neutral point distance from front wing
LE as % of chord cgx - Center of gravity wrt LE as % of chord
npx - Neutral point of entire aircraft as % of chord
2

Executive Summary
Three configurations were proposed to meet the Request for Proposal (RFP) for an
economical unmanned agricultural aircraft to perform crop dusting missions. The first option
was a blended wing body configuration meant to be more efficient by lowering drag and
increasing lift. A second option was a biplane configuration to minimize aircraft dimensions.
The remaining option was a low wing conventional configuration to keep the system simple and
cost effective. All the configurations used a tractor propulsion system and tail dragger landing
gear configuration. The blended wing body configuration used a single vertical tail while the
biplane and conventional configurations use a conventional tail set-up.
The Agricultural Unmanned Aircraft System (AUAS) needed to be “rugged, low cost,
and easy to fly.” In order to meet the ruggedness requirement, the three configurations were
designed with strong and durable landing gear. In order to meet the low cost requirement as well
as a requirement for “off the shelf” components, an existing engine and avionics components
were used. To meet the easy to fly requirement an autonomously operated aircraft was proposed,
which includes provisions for advanced software. Another given requirement was that the
aircraft needed to be completely transported by a pick up truck, and to allow for this the
conventional configuration was proposed to have folding wings; the biplane configuration and
blended wing body configuration were designed to be small enough to not need folding wings.
The studies contained herein on the three candidate configurations show that the RFP
requirements are best satisfied by the conventional monoplane variant. Therefore, this is the
configuration on which to proceed with future design work.
3

1. Initial Design Down‐Selection (MD)
1.1 Candidate Configurations
The three evaluated design variants were selected from a pool of candidate
configurations, which were trimmed down via simple conceptual considerations as to the design
requirements of the craft as it was too early for any detailed analysis. Table 1.1 lists the different
aircraft components that were considered to be combined together in varying combinations.
Table 1.1 Aircraft Component Variants Component Variants
Wing Upper monoplane, Lower monoplane, Biplane, Tandem, Flying wing Fuselage Conventional, Blended wing, Twin boom Empennage Conventional, T-tail, V-tail, Canard, Ring tail Landing Gear Tail dragger, Tricycle, Retractable Propulsion Pusher, Tractor, Multiple Engine
1.2 Wing Variant Down-Selection The main motivator in selection of a wing configuration was making sure that the sprayer
system performed optimally. This allowed for the selection of a lower wing monoplane over an
upper wing version as the spray pattern would be obstructed less. The same can be said of a
flying and tandem wing to some extent, but the main factor in not pursuing those configurations
was the unneeded complexity and cost that would be associated with each, being more
complicated than a simple mono or biplane wing configuration.
1.3 Fuselage Variant Down-Selection
The twin boom was not selected as a candidate fuselage because, given the payload that
the plane would be required to carry could fit in a single cylindrical fuselage easily, there would
be no benefit to a twin boom configuration. Further, the added structural weight would be a
hindrance. This made for the simple choice of choosing a conventional cylindrical fuselage,
although a blended wing configuration was also considered to offer greater efficiency.
4

1.4 Empennage Down-Selection
For the empennage, the selection was made mainly on the basis of simplicity. Having a
V-tail, T-tail or other control surface configuration more complicated that a conventional tail
conferred no benefits necessary to meet the RFP performance requirements. All would simply
increase the complexity and cost of the system, which the RFP is intended to keep down.
Therefore, sticking with a conventional tail across variants was the logical choice.
1.5 Landing Gear Down-Selection
For a crop duster, the only landing gear configurations that are generally used are either
tail dragging or tricycle setups as they are simple and robust. A retractable version of either was
ruled out as again adding only complexity and not any needed boost to flight performance. The
tail dragger was chosen for each because it would be cheaper and easier to control on the ground
than the tricycle, where some sort of steering or articulation of the gear would be required.
1.6 Propulsion System Down-Selection
Engine choice was motivated both by cost and the nature of the mission. A pusher engine
would suck in the spray from the wing mounted sprayers, making that a poor choice. Further, the
payload was not nearly large enough to require the thrust of multiple engines. Thus a single
engine in tractor configuration would be the choice across variants.
1.7 Three Variant Selection
After eliminating the obviously less efficient component choices, a few configuration
combinations remained. From these, the three variants were chosen to be a monoplane, biplane
and blended wing with conventional tails, a single tractor engine and tail dragger landing gear.
5

2. Configuration (MF)
2.1 Core systems configuration
Having established the three core design types, initial design on the internal and external
configuration of the aircraft could begin. Preliminary design focused around determining rough
size, shape, and placement of the core systems necessary for basic aircraft functionality.
2.1.1 Propulsion
Rough estimates were used to approximate the volume required for both fuel tanks and
overall engine size, both based on historical data. The fuel tanks were represented by slender
rectangular sections, while the engine was assumed to occupy a roughly cubic volume.
2.1.2 Payload
As designated by the RFP, the aircraft would be required to utilize a self-contained
pumping apparatus for liquid payload dispersion. The volume of payload – both liquid and solid
– was also specified by the RFP, making preliminary modeling relatively simple. In order to
achieve a more streamlined fuselage shape, the payload volume was constrained to a slender
cylindrical or rectangular section. This proved to be greatly advantageous over the spherical
shape of the pumping apparatus, which caused numerous design problems due to both its size
and shape. Additionally, the solid and liquid payload volumes were superposed, with the
intention of using a fixed hopper for the solid payload and a removable tank for liquids, the latter
of which could be placed inside the former. This greatly reduced the anticipated fuselage size,
which is preferable for low weight, a primary concern on this project.
2.1.3 Avionics
A final volume block was allocated to the necessary avionics. This volume was treated
rather amorphously, conforming to whatever space was available in the desired fuselage
6

configuration. This would later be refined after actual avionics would begin to be selected. For
the meantime, it provided a reasonable estimate for general sizing concerns.
2.2 External configuration
The volumes and shapes determined from the initial systems analysis were then placed in
several configurations. All configurations were built around anticipated static stability, placing
the varying payload sections near the expected center-of-gravity of the overall aircraft. Several
variations involving the placement of the pumping apparatus and the avionics bay were
produced. However, after creating preliminary external structures to house the estimated
volumes, it was quickly decided that the pump, with its spherical configuration – would have to
be placed near the front of the fuselage. Placing the spherical apparatus rearward resulted in
either consistently thick fuselage sections or a bulge in the fuselage near the pump. Both
conditions are detrimental to aerodynamic efficiency, and so any configuration locating the
pumping apparatus in the aft fuselage were dismissed from the design.
External structure was then developed around these initial volume arrangements, based
on the three selected configurations: monoplane, biplane, and a blended wing body. Several 3D
concept sketches were developed for each of these general configurations, with those with the
most desirable characteristics being chosen for continued development. Commonality became a
key concern for the biplane, as a complete redesign versus the monoplane would be cause for
extensive amounts of additional analysis, which would not further the goal of determining
whether a biplane or monoplane configuration was better suited to the design conditions. The
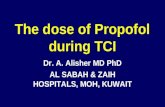
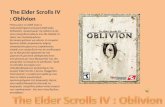
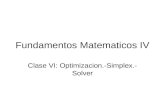
finalized external designs are illustrated through use of dimensioned three-view drawings in
Figures 2.1-2.3.
7

Figure 2.1 Monoplane configuration layout.
8

Figure 2.2 Biplane configuration layout.
9

Figure 2.3 Blended wing body configuration layout.
10

2.3 Structural configuration
Using data gathered by the Structures group, the basic underlying structure for each
resultant external airframe shape was estimated. The structure was determined largely by the
characteristic shape of the airframe as previously determined, and did not contribute significantly
to the external designs. The structural data did, however, become vitally important in the later
weight build-up and balancing operations. Please refer to Structures for more information.
2.4 Additional systems configuration
2.4.1 Avionics
After the preliminary airframe designs were completed, avionics began to be selected.
This allowed for both a more accurate bounding volume for the avionics bay and an estimated
weight value, which was used in roughly determining initial configuration positions.
2.4.2 Propulsion
With an engine selected, the estimated propulsion bounding cube was replaced with an
accurate model of the actual engine to be used by the aircraft, which allowed for significant
airframe improvement in and around the engine area of the fuselage. Nacelles with air inlets
were added to the sides of the cowling for the more conventional configurations, sheltering the
engine cylinder heads from the elements while still allowing sufficient airflow to provide both
power (through combustion) and cooling effects. Fuel consumption requirements were also
calculated at this point, allowing the fuel tanks to be appropriately sized. The fuel tanks also
began to conform to the wing geometry, instead of merely representing a necessary design
constraint.
11

2.4.3 Payload delivery system
An initial liquid payload delivery system was also designed, consisting of a length of
piping outfitted with specialized nozzles at regular intervals. This structure was suspended
beneath the wing, offset from the trailing edge. A number of brackets were utilized on each wing
to support this added load, being spaced at intervals along the overall span.
2.5 Weight and balance
2.5.1 Structural weight
The primary concern during the weight build-up procedure was the overall weight of the
airframe – i.e., the empty structural weight of the aircraft. In order to best estimate this weight,
significant cooperation was made between the Configuration and Structures groups. Skin
thickness over all external surfaces was assumed to be a uniform 1/16 of an inch and made
entirely of 2024 Aluminum. Wing ribs were placed uniformly throughout the structure, and were
assumed to have an average cross-sectional area equivalent to 50% of the cross-sectional area at
the mean chord of the wing. Additionally, the ribs were assumed to be 1/16 of an inch thick and
made of 2024 Aluminum. The fuselage was assumed to be supported primarily by a set of ring
frames along the length, which were also assumed to be made out of 1/16 inch 2024 Aluminum.
The cross-sectional area of the ring frames was assumed to be 50% of the cross-sectional area of
the fuselage at 2/3 of the length. Similar schemes were used for the small number of supporting
ribs in the horizontal stabilizer and vertical tail structure. Additionally, I-beam cross-sections
were used to estimate linear density for aluminum spars and stringers used through the wings and
fuselage to add additional structural support and stiffness.
Many of these estimates were purposely made higher than the anticipated actual values.
This provides for any additional weight due to intermediary support structures, cables, linkages,
12

and any other unanticipated weight increases. Overall, such analysis yielded reasonable values
with a much greater basis in physical reality than many general formulae presented in academia
based on historic trends, which may or may not be applicable due to differences in materials and
construction techniques.
2.5.2 Component weight
Component weights were easily obtained from either stated values (e.g., the payloads) or
from manufacturers’ published data (e.g.., the engine). Necessary structural members for
components, including the engine firewall and the spray system support struts, were calculated in
a manner similar to that outlined above for the overall airframe. Fuel mass was calculated using
standard density for 100LL multiplied by the total fuel tank capacity. These values combined
yielded overall payload, component, and fuel weights.
2.5.3 Center of gravity calculation
In order to facilitate calculation of the center of gravity in all three dimensions, the
standard Z-up coordinate system used in solid modeling was utilized, with all points referenced
to the modeling datum. Using a series of software scripts, centroids for each major airframe and
subsystem component were able to be calculated and plotted in modeling coordinates. Combined
with the mass data from the weight build-up, these individual centroids were appropriately
weighted, and the overall C.G. of the aircraft was able to be easily determined. It should be noted
that the centroid calculations were based on homogenous materials with uniform, constant
density throughout their volume. Any variations in density (e.g., due to different sections of
material within a single structure or component) were assumed to be negligible; if this were not
the case, the analysis would provide only approximate (and not exact) C.G. locations.
13

2.5.4 Static margin calculation
Using the neutral point location determined by the Stability & Control group, the static
margin was able to be calculated. By translating the neutral point to the modeling coordinate
system, the static margin for each configuration was easily obtained. These values were then
passed back to Stability & Control for further analysis.
2.5.5 Balancing
In order to maintain positive static stability by at all times, it was dictated by the Stability
& Control group that the C.G. must remain forward of the previously-calculated neutral point
during the full range of flight conditions. In order to achieve this, numerous sub-systems were
adjusted to balance out the overall aircraft C.G.; in fact, the fuselage was actually increased in
length over its original (pre-balancing) configuration by nearly an inch in order to provide for
sufficient component shifting to achieve the desired stability conditions. This increase allowed
the engine to be seated further forward, pulling the C.G. significantly forward due to the large
mass of the engine and propeller assembly. Additionally, this freed up an extra inch of
longitudinal movement between the remaining subsystems housed within the fuselage. The
finalized, balanced internal layouts for each of the three primary configurations can be seen
through the use of cut-away drawings in Figure 2.4. The C.G. locations noted are those for the
empty weight set-up.
2.6 Final configuration
After numerous iterations due to airframe, airfoil, wing geometry, and other changes, the
designs were externally finished. Further work was required in order to balance the internal
configuration in order to maintain the necessary static stability. At each iteration point, the
resultant geometry, weight, and C.G. data was passed off onto all other design groups for further
14

analysis and development. This continued in a mutual fashion until the configurations were
finally finalized.
Figure 6.4 Cut-away drawings detailing internal configuration for primary designs.
15

2.7 Landing gear trade study
Typically, advanced-lift aircraft such as flying wings and blended wing bodies utilize
some form of tricycle landing gear, as opposed to the taildragger (or “conventional”)
arrangement used here. Tricycle gear were considered for the BWB design, but were found to
provide insufficient ground clearance due to the presence of the relatively low-handing spray
booms on either wing. Utilizing a taildragger configuration allows for an allowable ground
clearance with reasonably-sized gear. In contrast, a tricycle configuration would require much
longer gear struts in order to provide sufficient ground clearance when pitching up during
takeoff. In addition, tricycle configuration gear are typically not particularly robust in
comparison to most tail dragger arrangements. This is of great importance due to the RFP
requirement for this aircraft to operate on dirt, gravel, or other improvised airstrips. Such
conditions produce much more stress on the landing gear in overall use, and are more suited to
large main oleo or spring-steel struts with a spring-steel tailwheel than to the possibly more
complex tricycle configurations, with more delicate steerable nosewheels.
2.8 Detailed analysis of payload delivery system
2.8.1 Onboard Storage
As the primary function of the aircraft is aerial application of solid particles and fluid
pesticides, components that provided ways to deliver both types of product to the crops were
needed. For the storage tank, a solid particle hopper with a funnel shape was designed. At the
base of the tank was an auger to pull product down into the dispersion outlet.
The fluid storage tank was designed to “plug into” the solid particle hopper. A hose that
can be stored beneath the solid particle hopper connects to the fluid storage tank. The hose is
then connected to a pump which pumps the fluid into the spray booms and out the spray nozzles.
16

2.8.2 Application Techniques
After being pulled down from the solid particle hopper by the auger, the solid particles
are released into the atmosphere through the dispersion outlet. The solid particle drop
mechanism is purely a gravity fed system; the solid particles simply fall out of the aircraft. A
fairing around the dispersion outlet helps to decrease the aerodynamic drag and also helps to
produce an even spread behind the aircraft.
The liquid product is applied through a series of nozzles on the boom below and behind
the trailing edge of the trailing edge of the wing. From the fluid storage tank a pump pulls the
fluid into the booms and then the fluid is sprayed on to the crop by way of the nozzles. The
nozzles are an “off the shelf” product designed specifically for aerial application.
2.9 Future work
2.9.1 General configuration
The largest area to be addressed is that of more intricate modeling of the internal and
external structure of the overall aircraft. With future work from the Structures group, the internal
configuration of structural members can be established and actually calculated, as opposed to the
estimation used for this analysis. This will also contribute to perfecting the internal arrangement
of other subsystems, as they will be able to be precisely arranged according to the positioning of
nearby structural members. All of this will be used to better balance the aircraft to not only
achieve stability, but to achieve the smallest range possible of C.G. (and hence static margin)
shift over the entire flight profile. The solid payload hopper will also be designed in detail to
allow the liquid payload tank to mount securely using some sort of quick-release fastener system.
Similarly, the access hatches for the payload and avionics will also be modeled for best user use
with minimal detrimental effects on aerodynamics and structural concerns.
17

2.9.2 Payload delivery system
Once an airplane configuration is selected the process of optimizing the spray system to
suit the particular configuration can begin. The angle at which the nozzles are aligned with
respect to the wing needs to be optimized for maximum coverage. The angle at which a
particular nozzle is aimed with respect to the longitudinal axis needs to be optimized for
maximum coverage as well. To reduce aerodynamic drag produced by the spray system, a
streamlined spray mechanism needs to be designed. Once the streamlined spray mechanism is
designed a trade study on production cost effectiveness vs. drag reduction will need to be done.
The method for dispersing solid particles needs to be investigated as worries about
coverage are inherent in the use of a single dispersion outlet. Possible solutions to the solid
particle dispersion problem include creating more dispersion outlets along the wingspan of the
aircraft and dropping the solid particles over that greater length, which would in turn produce
more coverage for the solid particle dispersion. Another, simpler solution would be to engineer a
divergent duct designed for optimum coverage with a certain size of particulate matter.
3. Structures and Loads (MD)
3.1 RFP Requirements
The RFP performance demands as related to the structural design area are relatively
straightforward. First, the aircraft is supposed to be of a fixed wing design. Additionally, the
craft’s payload will consist of 235 or 300 pounds of liquid or solid material to spray over the
field, operating just above ground level or at 1000 feet without a payload. Given these
parameters, these payload requirements will not put tremendous strains on any common aircraft
18

structure. Instead the challenge will be to eventually optimize the design in such a way as to be
as efficient, simple and cost effective as possible.
3.2 Structural Considerations
The main structural consideration for any aircraft is both designing the individual parts to
withstand the loadings it is expected to undergo and maintaining the load paths throughout the
entire aircraft to transfer the load throughout to achieve an efficient design. This necessitates that
the structures in and connecting the fuselage, wings and control surfaces of the aircraft be
properly configured. However, because of the standard tail configuration used in the designs the
control surfaces are not intended to generate any significant percentage of lift for the aircraft.
Because of this the main concerns for the design, at least at present, are in making sure that the
wing is able to support the lift force of the aircraft, transfer it through the fuselage and make sure
the fuselage is able to properly support all of the internal payloads.
3.2.1 Fuselage Structures
In each variant, in order to accommodate the payload, sensors, pumping systems and
engine it was decided that a ring frame structure would be best for the fuselage. The other main
choice of a wing-box carry through configuration would have either forced the fuselage to
become larger to accommodate the internal payload or require other payload modifications that
would have adversely affected the center of gravity of the aircraft. In order to transfer load along
the fuselage between the ring frames, again to best fit around the internal payloads, stringers
along the length of the fuselage will be used. The stringers at the bottom of the fuselage will
simply be thicker in order to directly carry the weight of the internal payloads, whereas the
stringers at the top can be relatively thin as they have little load to carry. The vast majority of
these structures will be made out of aluminum, as it is light, relatively strong and cheap. Certain
19

structural elements that require greater reinforcement will be supplemented with steel structure to
add stiffness.
3.2.2 Wing Structures
The wing of each variant has to be designed in such a way that it can withstand the forces
due to lift and drag on the wing as well as the twisting moment generated by the varying lift
distribution along the wing cross section. This requires that the wing both have main spars going
down its length and that the skin on the wing be thick enough to carry most of the moment on the
wing, which is normal in a thin walled structure such as an airplane wing. Ribs will be needed
near the wing root where the fuel tanks are located in order to transfer the weight of the tanks to
the wing spars effectively, however as the wing is meant to have three spars there is little need
for ribs past the fuel tank locations. This is because the only additional attachments to the wing
past the fuel tank areas will be the sprayers, which will add negligible loading. A diagram of the
wing and fuselage carry through structure is shown below in Figure 3.1
Figure 3.1 Basic wing/fuselage structural configuration – isometric view.
20

Additionally, the monoplane variant’s wingspan is too long to fit the transport
requirements of the RFP. This necessitates that the portion of the wing past the fuel tanks be
folding. However, designing the folding wings is too complex for this stage of development.
Also, while it is difficult at this time to calculate precise wing loading values one can get a rough
estimate of the forces and moments at the wing roots by assuming that the wing generates the
whole lift of the aircraft and that lift is distributed uniformly along the wing. By then treating the
wing as an Euler-Bernoulli beam one can then calculate rough reaction values at the wing root
that are likely to occur in steady and level flight, which are shown below in Table 3.1.
Table 3.1 Wing Root Forces and Moments at Maximum Payload Variant Root Force (lbf) Root Moment (lbf-ft)
Monoplane 680.2 7047 Biplane (upper) 680.2 0 Biplane (lower) 340.1 1700.5
BWB n/a n/a
3.2.3 Landing Gear
Landing gear is of course necessary to have on any aircraft. Given the relatively low
overall weight of the aircraft and the need for the ability to land in rough fields, keeping the
configuration as simple as possible was ideal. All the variants were designed as tail draggers
because it is a configuration that is simple and cheap to build and also easy to control on the
ground, which is why it is found on many manned crop dusters. Therefore the only question
remaining was what type of landing strut the two forward wheels had. The main choices for this
include solid spring, levered bungee or oleo shock-strut designs. All of these are comparatively
simple and robust enough to withstand a rough landing, but given that the aircraft is unmanned
the shock absorbing requirements for each are somewhat more relaxed than for a manned aircraft
so long as the sensors and other payloads remain intact. In order to best withstand the shock
21

loads of landing the gear is going to be made out of steel regardless of the configuration.
Currently the preferred design is that of the oleo shock-strut, because the solid spring design
tends to be heavier while the levered bungee generates more drag than the others. However,
these configurations will be compared in depth to find the optimal choice later once weights and
configurations are fixed; the general location can be seen on the previous variant images.
3.3 V-n Diagrams
Having an idea of the maximum loading that an aircraft is expected to undergo during
flight at various velocities is essential to properly designing the structure of the aircraft. This can
be done through the creation of V-n diagrams, the calculations for which are given in the code in
Appendix Y, which give a visual representation of the maximum g-loading that the aircraft is
expected to experience and survive during flight. Pictured below are the V-n diagrams for each
of the different variants at the maximum weight of full fuel and solid payload.
Figure 3.2 Monoplane variant V-n diagram (max weight).
22

Figure 3.3 Biplane variant V-n diagram (max weight).
Figure 3.4 Blended wing body variant V-n diagram (max weight).
From these one can see that there is only a short range of velocities in which the
maximum loading will occur above cruise velocity; however the wings must still be designed to
23

take this loading. Also, it is apparent that gust loadings during normal flight are of minimal load
impact, which is partly due to the lower speeds the aircraft is flying at.
3.4 Trim Diagrams
The V-n diagrams only give the maximum g-loading for the aircraft though; in order to
calculate the actual normal and axial loads, corresponding to the lift and drag, expected on the
wing one needs to look at the aerodynamic values versus angle of attack. This is done by
manipulating the lift, drag and moment coefficients in order to find the force coefficients on the
wing during normal flight, which is done by the code in Appendix Y. These force coefficients
versus angle of attack for each aircraft variant are shown in the figures below. These diagrams
are also made under the simplifying assumption that the horizontal tail is parallel with the wing
as further design, specifically tail airfoil selection, is needed to do more realistic calculations.
Figure 3.5 Monoplane variant trim diagram.
24

Figure 3.6 Biplane variant trim diagram.
These force coefficient values can in turn be multiplied by the appropriate max load
factor as given by the V-n diagram and design values to find the maximum force that the wing
structure must be able to withstand. However, doing this design and calculation was outside the
scope of current efforts. Further, the difficulty of attempting to calculate what the distribution of
lift over the blended wing body would be, given the limited number of design tools available,
made doing a similar trim diagram for the blended wing variant time prohibitive.
3.5 Material Trade Study
The main trade study that could be performed at this stage of design was in choosing the
materials to be used in the structure of the aircraft. Because of increasing use of composite
materials in all types of aircraft design, it was necessary to compare modern fiberglass and
carbon fiber composites against more traditional material choices such as aluminum and steel.
Looking at the most relevant mechanical properties in Table 3.1 of elastic and shear modulus (E
and G respectively), even when taking density into account, it becomes apparent that fiberglass
25

cannot offer the same performance as aluminum in the structure of the aircraft. Only continuous
carbon-fiber composites offer specific properties that can rival steel and aluminum. However,
this is highly dependent on the ply orientations and therefore one does not get the same
combination of elastic and shear modulus as with the bulk metals. Furthermore, the much higher
costs of carbon composite versus metal and the greater complexity in utilizing it means that it is
unsuited for this design as it is supposed to be simple and cost effective. Therefore aluminum
and steel are the materials of choice for this aircraft. Carbon composites would only be used if
aircraft weight became a serious problem later on in development.
Table 3.2 Material Mechanical Properties Ref. [2]
Material E (GPa) G (GPa) density (kg/m3) Fiber fraction Ply Orientation Aluminum 2024 75 28 2800 n/a n/a
Steel (AISI 4130) 210 81 8000 n/a n/a Discontinuous Fiberglass 13.8 3 1760 0.4 n/a
18.5 3 2050 0.6 n/a 23.1 3 2320 0.8 n/a
Continuous Fiberglass 28.7 4.6 2040 0.6 0/90 5x5 14.1 12.8 2040 0.6 +/-45 5x5 33 7.8 2040 0.6 0/45 6x4
Continuous Carbon Fiber 99 13 1560 0.6 0/45 7x3 63 22 1560 0.6 0/45 4x6
3.6 Future Work
After deciding upon which aircraft variant to use, there is much more structural work to
do. After a more detailed lift profile for the wing design is obtained, it will be possible to
thoroughly calculate the forces and moments along the wing structure and fix the internal
structure accordingly to sustain those loads with the desired margin of safety. Further, these
values can be used to design the wing and ring frame interface at the wing root to properly
transfer the loads across the fuselage and support the weight of the fuselage itself. Further, once
26

the center of gravity and therefore location of the internal payloads is fixed, the fuselage
structure dimensions can be calculated in detail as well. After this is done, and one has fixed the
weight of the aircraft structure and the rest of the craft, the loads the landing gear must sustain
can then be analyzed in detail for each different configuration, from which the most appropriate
selection can be made.
4. Sizing Analysis and Concept Selection (TF) 4.1 Mission Profile The mission profile was well documented and was even included in the RFP. However,
there were a few modifications that could be made to the mission profile in the RFP. For
example, it was up to the team to determine if the aircraft would have to travel back to the
airstrip after its’ payload drop or if the mission would end close enough to the runway where this
was not a consideration. Our team decided to go with the worst case scenario where the aircraft
would have to travel some distance before reaching the runway. Another assumption that was
made was that the airplane would retain its’ payload during the flight. This assumption would
also represent the worst case scenario and gave the team an idea of what the very upper weight
limit would be for the aircraft. This mission profile can be seen in Fig. 4.1
0 1
2 3
4
5 6
7
8
Figure 4.1 Payload delivery mission profile.
27

The RFP also mentioned another mission profile that would act as a “ferry” flight where
the plane could be transferred between missions. The distance for this mission was specified in
the RFP to be one to two miles, so the team decided on the two mile range to account for the
worst case scenario. The mission profile for the ferry flight can be seen in Fig. 4.2
0 1
2 3
4 5
Figure 4.2 Short ferry flight mission profile.
4.2 Initial Sizing
Initial sizing calculations were conducted using Raymer (Ref [1]). The initial sizing
method presented in these references allows the design team to achieve an estimate of the take
off gross weight (W0 or TOGW) so that further analysis can be done on different aspects of the
aircraft. If additional weight is added over the initial estimate it is likely that the plane will still
fly, but not up to specifications.
For this analysis, the TOGW was split up into three categories: fuel weight, payload
weight, and empty weight. The payload weight comes from the RFP and depends on what kind
of cargo the plane is carrying. The analysis was done for both types of payloads; however the
design team is going to use the heavier payload in its design considerations because that is the
maximum weight.
The initial sizing depends a lot on the selected mission profile and how it is broken up.
The team used the same mission profile as described in section 4.1 and used each leg to perform
weight fraction analysis. Once each segment’s weight fraction was found, they were multiplied
28

together to get the final weight fraction. From this the fuel fraction can be found and a safety
factor of 1.06 was applied to account for reserve and trapped fuel. Takeoff, climb and landing
fractions were taken from historical data in Table 3.2 of Ref [1]. The descent portions of the
flight were considered part of the cruise leg, so their weight fractions were assumed to be one.
The cruise portion distance was calculated using data from the RFP and some simplifying
assumptions. The RFP specified a field size of 1000 ft by 0.5 mi. For the initial sizing, the
design team decided to estimate the distance to spray the field by taking the area sprayed per
pass and adding the turn distance times the number of passes. A second cruise portion was
added after the spraying mission to account for the aircraft returning to the landing strip and to
give the maximum possible distance that the aircraft would have to travel. This distance was
estimated to be around 1000 ft, or the width of the field. The weight fraction for both cruise
segments was calculated using the Breguet range equation in Ref [1].
The empty weight fraction was found using the equation found in Table 3.1 of Ref [1].
Historical values are given for different parameters and then using an initial guess for the
TOGW, the empty weight fraction can be found. To be thorough, a survey of historical
agricultural aircraft was also taken and the results were compared to what was obtained using
Raymer (Ref [1]). The results, along with what the empty weight fraction for our proposed
design (based on the TOGW determined later) are presented in Fig 4.3 and Table 4.1.
29

y = -5E-10x2 + 5E-06x + 0.4953
0.000
0.100
0.200
0.300
0.400
0.500
0.600
0.700
0 2000 4000 6000 8000 10000 12000 14000 16000 18000TOGW (lbs)
We/W
0
Figure 4.3 Plot to compare empty weight ratios.
Table 4.1 Data for the Comparison of Empty Weight Ratios Plane TOGW (lb) Empty Weight (lb) We/W0
AT-401B 7860 4244 0.540 AT-402A/B 8600 4100 0.477 AT-502A/B 9400 4297 0.457 AT-602 12500 5600 0.448 AT-802A 16000 6505 0.407 AT-802F 16000 7210 0.451 PAC Cresco 8250 2950 0.358 An-2 12000 7300 0.608 An-3 13000 7000 0.538 M-18 Dromader 11700 5975 0.511 PZL-106 Kruk 6600 3674 0.557 PA-25 Pawnee 2900 1288 0.444 PA-36 Pawnee Brave 4400 2180 0.495 GA200 Fatman 4400 1914 0.435 Cessna 188 3300 2160 0.655 G-164 Ag Cat 7020 3150 0.449 Ayres Thrush 6000 3700 0.617 CallAir A-9 3800 1800 0.474 Design Point 1120 559.97 0.500
30

The weight fractions were then used to calculate the fuel fraction that each configuration
needed and then the TOGW was guess iteratively until the guess approximately equaled the
result from the equation based on the empty weight fraction. A number of design parameters
were chosen based on the airplan configuration and those are presented below in Table 4.2. Each
configuration had many parameters in common, such as CD0, SFC, and propeller efficiency. The
spray distance is different for each configuration because of the wingspan that is required to
produce the desired performance and this seems to be the biggest difference between the
configurations. A summary of the iterated TOGW and weight fractions are also tabulated in
Table 4.3. Finally, a summary of the mission segments and their weight fractions are presented
in Table 4.4.
Table 4.2 Input Data for Initial Sizing
Parameter Conventional Biplane Blended Wing
Body Operating Altitude (ft) 20 20 20
Operating Speed (ft/s {mi/hr}) 168 {114.5} 168 {114.5} 168 {114.5}
Operations Distance (ft {mi}) 132000 {25} 264000 {50} 264000 {50}
Turning Speed (ft/s {mi/hr}) 168 {114.5} 168 {114.5} 168 {114.5} Minimum Turning Radius (ft) 327.6 327.6 327.6
Turn Distance (ft {mi}) 18064 {3.42} 18064 {3.42} 18064 {3.42} Return Distance (ft) 1000 1000 1000
Spray Time (seconds {minutes}) 893 {14.89} 1678.95 {27.98} 1678.95 {27.98}
CD0 0.03 0.03 0.03
e0 0.85 0.85 0.85 AR 6.67 13.33 3.33
SFC (cruise) (lb/hr/bhp) 0.1527 0.1527 0.1527 Prop Efficiency (cruise) 0.8 0.8 0.8
(L/D)max 12 13 11
CL,max 1.44 1.44 1.44 Solids Payload Weight (lb) 350 350 350
Liquids Payload Weight (lb) 285 285 285
31

Table 4.3 Initial Sizing Results for Input Data
Parameter Conventional Biplane Blended Wing Body TOGW solids (lb) 1121 1126 1130
TOGW liquids (lb) 933 938 941
We/W0 0.6 0.6 0.6
Wf/W0 0.070 0.072 0.073 Solids Mission Fuel Weight (lb) 78.7 81.6 83.0
Liquids Mission Fuel Weight (lb) 65.5 68.0 69.1 Max Fuel Capacity Needed (gal) 13.13 13.63 13.85
Table 4.4 Summary of Mission Segment and Weight Fractions
Leg Segment Height
(ft) Range (miles) (L/D)
V (ft/s)
SFC (lb/hr/lb) Assume Wi/Wi-1 Wi/W0
0
Warm up and
taxi 0 NA NA NA NA Included in Takeoff 1.000 1 Takeoff 0 NA NA NA NA Historical fuel fraction 0.970 0.970 2 Climb variable NA NA NA NA Historical fuel fraction 0.985 0.955
3 Descend variable NA NA NA NA Descent is part of
cruise 1.000 0.955
4 Cruise 20 25 12 168 0.12 (L/D)=(L/D)max 0.997 0.953 5 Climb variable NA NA NA NA Historical fuel fraction 0.985 0.939
6 Cruise 50 0.19 12 168 0.12 (L/D)=(L/D)max 0.99998 0.938
7 Descend variable NA NA NA NA Descent is part of
cruise 1.000 0.938 8 Land 0 NA NA NA NA Historical fuel fraction 0.995 0.934
4.3 Constraint Analysis
The next step in preliminary analysis was the Constraint Analysis, which is used to
determine wing loading and power to weight ratios. The Constraint Analysis was performed
assuming that the plane was in the conventional configuration, but the constraint diagrams
should be similar for all of the different designs.
The Constraint Analysis was done using the results and assumptions from the initial
sizing. The assumptions and conditions that were used in the Constraint Analysis are
32

summarized below in Table 4.5. The equations for conducting the Constraint Analysis are
located in Anderson and Raymer (Refs [3] and [1]). The design team decided to perform the
Constraint Analysis on the most important parts of the aircraft’s flight, which include the takeoff,
landing, turning, and cruise. The plot resulting from the constraints is shown in Fig 4.4.
Table 4.5 Summary of Constraint and Assumptions Constraint Assumptions
Takeoff 750 feet, standard sea level (SSL) conditions, thrust(power) is much greater than the drag and ground friction
Landing 750 feet, standard sea level (SSL) conditions, CL,max,L is greater than CL,max
Sustained Turn
Load factor of 2.5, turn velocity equals operating velocity, SSL conditions, CD0=0.03
Cruise SSL conditions, velocity>1.3vstall, CD0=0.03, e0=0.85
4.4.1 Selection of a Design Point
From Fig 4.4, it is easy to see that the design space will be constrained by the sustained
turn and landing constraints. The design point that the team selected is located at a wing loading
of 16 lb/ft2 and a power to weight ratio of 0.095 bhp/lb. The design point was selected here so
that even if the plane changes, the constaints will not be violated. This design point also decides
a number of design parameters which are summarized below in Table 4.6. The results from the
design parameters also influenced the choice of design point because if the wing loading were
lower there would be less thrust required, but the wings would have to be very large. The
parameters were tabulated for both payload cases, however the heavier TOGW is more important
because that is the maximum.
Table 4.6 Summary of Design Parameters Given by Constraint Analysis
TOGW (lbs) Power Required (bhp) Sref Wingspan (ft) Chord Length (ft) 1121 106.50 70.06 21.62 3.24 933 88.64 58.31 19.72 2.96
33

0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
0.16
0.18
0.20
0.22
0 5 10 15 20 25Wing Loading (W/S)
Pow
er to
Wei
ght R
atio
(P/W
)
Cruise Constraint
Takeoff Constraint
Sustained CruiseConstraintLanding Constraint
Design Point
Figure 4.4 Constraint analysis diagram with design point selected.
5. Performance (TF)
5.1 RFP and Other Requirements
The RFP specified a number of performance values that must be met in order for the
design to be considered successful. There were a number of other parameters that were not
specified by the RFP so those were chosen so that the other design team members could create a
workable design. These specifications are outlined below in Table 5.1.
Table 5.1 Summary of Performance Requirements Requirement Value Source
Operating Speed 1.3*Vstall RFP Takeoff Distance (ft) 750 RFP Landing Distance (ft) 750 RFP Operational Altitude (ft) 20 RFP Ferry Altitude (ft) 1000 RFP Ferry Distance(mi) 2 RFP
Turning Radius (ft) < 250 Design Team
34

As was discussed in section 4 the three important requirements that must be met are the
takeoff and landing distance and the cruise distance to cover the fields. The other parameters
would be derived from what the plane could do based on the other performance characteristics.
The ferry mission could also be easily met if the three main specifications were because the
weight for the ferry mission is much lighter and the distance is also less than a regular payload
drop mission.
The only requirement that the design team felt the need to specify was a turning radius.
The value of 250 ft was chosen because of the width of the field. If the plane didn’t meet this
requirement it would not jeopardize the success of the payload dropping mission, however a
more maneuverable plane would make this mission easier and quicker to accomplish.
5.2 Design Parameters Investigated
To meet the requirements the most important parameters of the airplane are the
aerodynamics and structures. The structures portion will deal mainly with the wing loading and
the load factor that is applied during the turn. The aerodynamics performance parameters that
affect the critical performance requirements of the plane are CL,max, CD0, and AR.
The amount of wing loading is critical to almost every aspect of how the aircraft
performs, but is particularly important in the case of takeoff and landing. A higher wing loading
means that it is harder for the airplane to get off of the ground and also makes it harder to land in
a set distance. Because of the requirements in the RFP, our vehicle will need to have a low wing
loading. The load factor is important in determining turning radii and speeds. To achieve the
desired performance the load factor will have to be in the medium range.
For the cruise portion of the mission, it is critical to have a high lift to drag ratio (L/D),
which stems from a high CL,max and CD0 according to the equations in Raymer (Ref. [1]). When
35

CD0 is increased it decreases the maximum speed and range of the aircraft. CL,max has a big effect
on the stall speed of the aircraft as well as the takeoff and landing distances. When CL,max is
increased, the landing distance and takeoff distance decrease and the stall speed decreases as
well. Overall it is good to have a higher CL,max because the airplane will be more efficient and
less likely to stall. However one downside to having a high CL,max is that the cruise speed is
decreased. The cruise effects of a high CL,max can be offset by increasing the aspect ratio (AR) of
the wing to reduce the drag due to lift (induced drag or CDi).
5.3 Takeoff and Landing Performance
The equations that were used to determine the takeoff and landing performance came
from Raymer and Anderson (Refs. [1] and [3]). The equation accounts for the effects of wing
loading, ground friction, thrust, induced drag, and zero-lift drag. A spreadsheet was created in
Excel that took the values for each parameter and plugged them in to give the takeoff distance
for a given set of values. Different values were chosen for the velocity until a reasonable CL,max
was obtained. The analysis was done using the weight buildup values from Configuration and
the aerodynamics data from Aerodynamics.
The values for the takeoff and landing distances were then compared to what they were
with the chosen design point from the Constraint Analysis. A summary of this comparison can
be found in Table 5.2.
Table 5.2 Summary of Takeoff and Landing Distances
Configuration
Initial Weight (lbs)
Build-up Weight (lbs)
Initial takeoff distance (ft)
Revised takeoff distance (ft)
Initial landing distance (ft)
Revised landing distance (ft)
Conventional 1121 1361 468.86 1063.84 739.88 705.30 Bi-Plane 1126 1358 468.86 Not Available 739.88 406.34 Blended Wing Body 1130 1384 468.86 956.49 739.88 965.76
36

5.4 Sustained Turn Performance
Throughout the payload drop portion of the mission, the aircraft will be turning after
every pass, which makes the turning performance crucial to how well it will complete the
mission. The analysis used to determine the performance come from Anderson (Ref [3]). The
maximum load factor allowable by the thrust of the engine was calculated and from that the
turning stall speed, minimum turning radius, and turning velocity were calculated. Results from
this analysis are presented in Table 5.3 below.
Table 5.3 Summary of Turn Performance Based on Maximum Thrust Configuration nmax, thrust Vstall (ft/s) Turning Radius (ft) Conventional 2.22 164.62 446.25 Bi-Plane 1.18 94.56 1394.18 Blended Wing Body 1.05 112.60 2742.54
5.5 Other Miscellaneous Performance Parameters
Several other performance parameters were also specified in the RFP, but do not merit
their own section. Those parameters include the operating speed, the total mission time, and
drag for the segments of flight. The operating speed was specified in the RFP and was calculated
using an equation from Anderson (Ref [3]). Drag for each segment was based on the classic drag
equation using the dynamic pressure, wing area, and drag coefficient. These are all tabulated
below in Table 5.4 and 5.5.
Table 5.4 Summary of Miscellaneous Performance Parameters
Configuration Mission Time
(min) Vstall (ft/s) Minimum Operating
Speed (ft/s) Turn Rate
(rad/s) Conventional 20.50 110.61 143.79 0.352 Bi-Plane 32.30 86.93 113.01 0.352 Blended Wing Body 32.30 109.86 142.82 0.352
37

Table 5.5 Summary of Drag for each Segment Configuration Cruise Drag (lbs) Turn Drag (lbs) Takeoff Drag (lbs) Landing Drag (lbs)
Conventional 98.72 242.95 130.02 116.51 Bi-Plane 268.29 852.85 649.36 570.76 Blended Wing Body 400.63 1510.42 670.27 586.91
5.6 Trade Studies
Two trade studies were performed in an attempt to shed light on the cause of the
shortcomings of the designs, particularly with the takeoff and turning radius specifications. The
takeoff trade study had CL,max altered to gauge the effect that it would have on the takeoff
distance. From the trade study it can be concluded that a lower CL,max is beneficial to the takeoff
distance. The results can be seen in Fig 5.1. For the turning radius study, CD0 was altered so that
its effect on the loading factor, and therefore the turning radius could be seen. The effect of CD0
was not as profound as the results for CL,max however the study still shows that the lower the CD0
is the smaller the radius can be. This makes sense because if less thrust is being nullified by drag
it can then be used to power through a turn. The results of that trade study can be seen in Fig
5.2. Both trade studies were performed for the conventional configuration.
0
500
1000
1500
2000
2500
3000
3500
4000
4500
0 0.5 1 1.5 2 2.5
CL
Take
off D
istan
ce (f
3
t
Figure 5.1 CL trade study for the takeoff distance.
38

0.00
100.00
200.00
300.00
400.00
500.00
600.00
700.00
800.00
0.000 0.010 0.020 0.030 0.040 0.050 0.060 0.070 0.080 0.090
CD0
Turn
Rad
ius (
ft
Figure 5.2 CD0 trade study for the turning radius.
5.7. Future Work
Since the takeoff and turning requirements for the RFP were not met it is essential that
those are the first specifications that are looked into further so that they can become optimized
and fall within the desired range. The mission profile has been somewhat simple so far and
therefore in the future a better estimate of the performance can be obtained by discretizing the
mission profile further.
Other performance characteristics that should be looked at in the future include power
available, and by extension, climb rate. While these parameters are not essential to the RFP, the
fuel consumption and overall mission time could depend greatly on these parameters.
6. Aerodynamics (TL)
6.1 RFP Requirements, Initial Sizing, and Constraint Analysis While the RFP requirements do not immediately constrain the aerodynamic design in any
fundamental way, the previously completed initial sizing and constraint analyses provided basic
estimates of the wing geometry for the monoplane. The large span of the monoplane’s wings
39

requires a folding-wing design to ensure that the monoplane will fit on standard roads (a
requirement of the RFP). The only other RFP requirement with aerodynamic consequences is
the 750 ft takeoff/landing distance specification, which affects the design through performance
considerations.
6.2 Airfoil Selection
Before making additional design choices for any of the variants, the NACA 2412 airfoil
was selected for the wing of the monoplane, both wings of the biplane, and the “wing” portion of
the BWB. This airfoil was chosen for its relative simplicity, and its reasonable and well-
documented performance characteristics at the flight conditions specified by the RFP.
Additionally, a single airfoil section was chosen for the wing sections of all three variants in
order to standardize the basis for comparing their aerodynamic performance. The airfoil chosen
for both the horizontal and vertical tail sections of all three aircraft was the NACA 0012. This
airfoil was also chosen due to its relative simplicity, well-known performance characteristics,
and symmetric shape.
6.3 Wing/Fuselage Geometry In addition to the initial sizes determined by the Constraint Analysis, several wing design
choices were made for the monoplane to improve both aerodynamic performance and overall
stability. A gradual geometric twist of 3 deg was added to each wing, such that the tip airfoil
sections are angled downwards with respect to the root airfoil sections. This ensures that the root
of the wing will stall before the tip during a high angle of attack maneuver, allowing outboard
control surfaces to function even if a portion of the inboard wing has stalled. A positive dihedral
of 3 deg was also added to the wings to ensure roll stability (Ref [1]). This dihedral also helps
ensure that the wingtips of the low-mounted wings will not strike the ground during a less than
40

ideal landing. The angle of incidence of the wing was set to 3 deg, in order to achieve a
reasonable attitude orientation at cruise. Finally, sharp-cornered wingtips were used to prohibit
the free flow of air around the wingtip, weakening any wingtip vortices formed, hence reducing
induced drag without the need for heavier and more complicated winglets.
6.4 Aerodynamic Characteristics
6.4.1. Monoplane Variant
The required CL for the monoplane variant can be determined at the various flight
conditions in the mission profile by using equation A.4.1. For this equation, the required lift is
assumed to be roughly equal to the weight of the airplane (as supplied by Configuration), and
approximate velocities supplied by Performance are used. For a cambered airfoil, the
relationship between CD and CL can be determined via Equation 6.1.
CD = CDmin + K(CL - CLmin drag)2 (6.1)
Solving for the unknown variables in this equation is a lengthy process, involving many
of the equations in Ref [1] Chapter 12, and briefly summarized here. K is determined using
Equation A.4.2 and A.4.3. CLmin drag is determined using equations A.4.4-A.4.7 and NACA 2412
experimental airfoil data (Ref [3]). CDmin in Equation 6.1 is equal to CD0, and was first estimated
using Equation A.4.8, and then analytically determined using the component build-up method
outlined in Ref [1], and corresponding to Equations A.4.9-A.4.21. The component breakdown of
CD0 for the monoplane is shown below in Table 6.1.
Table 6.1 Component Drag Buildup for Monoplane Component CD0 % CD0 Total
Fuselage 0.0037 11.52
Wing 0.0082 25.36
V-Tail 0.0009 2.68
H-Tail 0.0022 6.63
Cowlings 0.0004 1.10
41

Landing Gear 0.0020 6.16
Sprayers 0.0105 32.21
Propeller 0.0018 5.46
Flaps 0.0029 8.87
Total 0.0325 100.00
After initial analysis was completed assuming that flaps were not installed on the TE of
the monoplane, performance considerations necessitated the addition of flaps to the design.
These flaps were sized according to equation A.4.22 and Chapter 16 of Ref [1]. The effect of
these flaps on CD0 and CDi is accounted for through equations A.4.23-A.4.24. Additionally,
ground effect was accounted for at takeoff and landing via equation A.4.25. The results of this
analysis yield the aerodynamic characteristics listed below in Table 6.2 for all RFP flight
conditions.
Table 6.2 Aerodynamic Characteristics for Monoplane Flight Condition Velocity (ft/s) Lift Required (lb) CL CD0 CD L/D
Take-Off 116 1500 1.461 0.034 0.126 11.613 Payload Drop 168 1400 0.646 0.031 0.044 14.616 Turn 168 2940 1.357 0.031 0.111 12.180
Cruise 168 1400 0.665 0.031 0.045 14.695
Landing 116 1400 1.364 0.034 0.113 12.095
6.4.2 Biplane Variant
Analysis of the biplane aerodynamic performance is similar to the analysis undertaken for
the monoplane. However, a simpler form of the relationship between CD and CL is used, shown
below in equation 6.2. This was done because it serves as a reasonable approximation of
equation 6.1 during the conceptual design process.
CD = CD0 + KCL2 (6.2)
42

CD0 for the biplane is calculated in the same manner as it was for the monoplane, and the
component values are below in Table 6.3. The wing combination unsurprisingly results in an
increased CD0 when compared with the monoplane. However, CD0 for the biplane is only 4%
larger than for the monoplane, this small difference is due to the lack of flaps on the biplane
configuration, as flaps comprised approximately 9% of CD0 for the monoplane.
Table 6.3 Component Drag Buildup for Biplane Component CD0 % CD0 Total
Fuselage 0.0035 10.35Top Wing 0.0060 17.77Bottom Wing 0.0046 13.73
V-Tail 0.0008 2.41
H-Tail 0.0024 7.00
Cowlings 0.0003 0.99
Landing Gear 0.0020 5.91Sprayers 0.0098 28.93
Propeller 0.0017 4.91
Wing Supports 0.0027 7.99
Total 0.0338 100.00
K can theoretically be calculated using equations A.4.2 and A.4.26 from Ref [1].
However, using equation A.4.26 with the geometry of the biplane yields an Oswald’s efficiency
factor of >1. This is theoretically impossible, and thus an estimated e value of .75 was used
instead. This value is suitably lower than e for the monoplane, however it is purely an estimate,
and thus the CDi calculated for the biplane is likely subject to non-trivial flaws. The aerodynamic
characteristics at the various flight conditions are below in Table 6.4 for comparison.
Table 6.4 Aerodynamic Characteristics for Biplane Flight Condition Velocity (ft/s) Lift Required (lb) CL CD0 CD L/D
Take-Off 105 1500 1.659 0.036 0.583 2.844 Payload Drop 168 1400 0.605 0.036 0.110 5.509 Turn 168 2940 1.270 0.036 0.363 3.498
43

Cruise 168 1400 0.623 0.036 0.114 5.451
Landing 105 1400 1.549 0.036 0.513 3.020
As is apparent from the table, CD is significantly larger than for the monoplane. This is
partially explained by the decrease in e relative to the monoplane. However, the much smaller
aspect ratio for the biplane is the larger cause behind the higher CDi it experiences.
6.4.3 Blended Wing Body
For the analysis of the BWB, the airframe was simply treated as three airfoils molded
together. Equation 6.2 was used again to represent the relationship between CD and CL for the
BWB. The tabulation of CD0 is shown below in Table 6.5
Table 6.5 Component Drag Buildup for Blended Wing Body Component CD0 % CD0 Total
Fuselage Wing 0.0036 8.49Wing 0.0029 6.90V-Tail 0.0007 1.56
Landing Gear 0.0020 4.76
Sprayers 0.0102 24.19
Propeller 0.0017 4.10
Total 0.0210 100.00
As expected for such a streamlined shape, CD0 is lower than both the monoplane and
biplane, yielding a value that is 36% lower than CD0 for the monoplane.
Aerodynamic characteristics for the BWB are tabulated below in Table 6.6. Despite the
BWB’s smaller CD0, the aircraft’s total CD quickly grows larger than that for both the biplane and
monoplane at equivalent CL values. This is due in largely to the small span of the craft, which
results in small equivalent aspect ratios for both the main wing section and the fuselage wing
section. This small aspect ratio results in a large induced drag for the craft.
44

Table 6.6 Aerodynamic Characteristics for Biplane Flight Condition Velocity (ft/s) Lift Required (lb) CL CD0 CD L/D
Take-Off 105 1500 1.659 0.036 0.583 2.844 Payload Drop 168 1400 0.605 0.036 0.110 5.509 Turn 168 2940 1.270 0.036 0.363 3.498
Cruise 168 1400 0.623 0.036 0.114 5.451
Landing 105 1400 1.549 0.036 0.513 3.020
As is apparent from the table, CD is significantly larger than for the monoplane. This is
partially explained by the decrease in e relative to the monoplane. However, the much smaller
aspect ratio for the biplane is the larger cause behind the higher CDi it experiences.
6.4.3 Blended Wing Body
For the analysis of the BWB, the airframe was simply treated as three airfoils molded
together. Equation 6.2 was used again to represent the relationship between CD and CL for the
BWB. The tabulation of CD0 is shown below in Table 6.5
Table 6.7 Component Drag Buildup for Blended Wing Body Component CD0 % CD0 Total
Fuselage Wing 0.0036 8.49Wing 0.0029 6.90V-Tail 0.0007 1.56
Landing Gear 0.0020 4.76
Sprayers 0.0102 24.19
Propeller 0.0017 4.10
Total 0.0210 100.00
As expected for such a streamlined shape, CD0 is lower than both the monoplane and
biplane, yielding a value that is 36% lower than CD0 for the monoplane.
Aerodynamic characteristics for the BWB are tabulated below in Table 6.6. Despite the
BWB’s smaller CD0, the aircraft’s total CD quickly grows larger than that for both the biplane and
monoplane at equivalent CL values. This is due in largely to the small span of the craft, which
45

results in small equivalent aspect ratios for both the main wing section and the fuselage wing
section. This small aspect ratio results in a large induced drag for the craft.
Table 6.8 Aerodynamic Characteristics for Blended Wing Body
Flight Condition Velocity (ft/s) Lift Required (lb) CL CD0 CD L/D
Take-Off 122 1500 1.275 0.022 0.629 2.026 Payload Drop 168 1400 0.628 0.022 0.169 3.708 Turn 168 2940 1.319 0.022 0.672 1.963
Cruise 168 1400 0.647 0.022 0.178 3.628
Landing 122 1400 1.190 0.022 0.551 2.160
6.5 Drag Polar and Final Aerodynamic Selection
The CL versus CD plots for all three variants are plotted below in Figure 6.1.
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
0 0.05 0.1 0.15 0.2 0.25 0.3
CD
CL
Conventional Bi-Plane Blended Wing Body
Figure 6.1 Drag polar for all three variants.
As expected from the previously discussed data, the monoplane has the greatest L/D ratio
at almost all CD values. Only when CL is vey low does the BWB have a better L/D ratio. This is
the expected behavior, because the majority of the BWB’s drag is due to induced drag. The
46

biplane experiences marginally better performance at high CD values over the BWB, however it
is never outperforms the monoplane.
Thus from an aerodynamic standpoint, the monoplane variant is the performs best, easily
surpassing both the BWB and biplane. The results indicate that the aspect ratio for both the
BWB and biplane are far too small to achieve a reasonable level of performance. Increasing the
span of both aircraft to a value similar to that for the monoplane would likely decrease the
aerodynamic performance gap that currently exists between them.
6.6 Aspect Ratio Trade Study
The effect of small aspect ratio on the biplane and BWB variants was made obvious in
the previous analysis, and a trade study examining the effect of aspect ratio on the performance
of the monoplane is a natural extension of this discovery.
As aspect ratio is varied from 6.65 to 1.7 for the monoplane, CD0 stays constant while CDi
steadily increases. Figure 6.2 below makes this readily apparent; as aspect ratio is decreased
from 6.65 to 3 the drag polar curve “squeezes inward” as L/D decreases at all values of CD.
Further reducing A to 1.7 causes CD to increase again for equivalent CL values, and at A=1.7 the
monoplane CL v. CD curve looks very similar to that for the BWB.
47

-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
0 0.05 0.1 0.15 0.2 0.25 0.3
C D
Monoplane, A=6.65 Blended Wing Body Monoplane, A=1.7 Monoplane, A=3
Figure 6.2 Drag polar for varying monoplane aspect ratio.
6.7 Future Work
The actual lift created by the wing at a given Reynolds number for the monoplane should
be determined to ensure the airplane will takeoff when expected. Additionally, optimization of
the wing span should be performed, as the added cost and complexity of a folded wing is
undesirable. Also, enhancement of the sprayer bar to reduce separation behind the cylinder
should be considered, as this would greatly decrease CD0. Finally, optimization of the take-off
and landing speeds with the ultimate goal of removing the flaps should be explored in order to
reduce the drag, weight, and cost penalty associated with these devices.
48

7. Propulsion (KP)
7.1 RFP and Other Requirements
The RFP simply states that the engine requirements are that it be a widely available “off
the shelf” engine that, based on technology available today, is best for the design. The process
of selecting an engine was affected by other requirements in the RFP such as the need to carry
the extra weight of the expendable payload. A wide range of studies were done to determine
which engine would be best for the design.
7.2 Engine Selection
Before actually selecting the engine type, a range of crop dusting and other light aircraft
were looked at in terms of what engines they used with respect to their weights. Using the data
from the initial sizing analysis and historical data from the aforementioned research, it was found
that an engine with approximately 100 horsepower would be needed to support the design. Since
all of the design configurations are light weight, the use of multiple engines or jets was dismissed
immediately due to lack of need and impracticality. The engine types that were researched were
internal combustion and electric.
Research was done on the Sonex Electric Airplane concept, which has a fully electric
engine that has a 24 hour charge cycle that gives one hour of flight. This system provides the
approximate equivalent of 80 horsepower. This would be a very good selection for this mission
profile if it were more widely available and slightly more powerful. An area for future work in
this project would be looking into using an electric motor such as this one. Since the Sonex
engine is still a concept model however, it was best for this design to choose a different engine.
Electric propulsion was therefore dismissed due to a lack of availability.
49

Several internal combustion engines with a power output close to the required value were
researched, and the Jabiru 3300 was chosen from the following list of candidates.
Table 7.1 Candidate Engines Ref [6] Maker Model Horsepower Cruise RPM Weight (lbf) P/W (hp/lbf) Rotax 912 UL 80 5500 134.2 0.596
912 ULS 100 5500 140.6 0.711 Aeroconversions AeroVee 2.0 80 3400 158 0.506
Lycoming O-235-C 115 2800 245 0.469 O-320-A 150 2700 275 0.545
Jabiru 2200 85 3300 132 0.644 3300 100 2750 178 0.562
Wankel LCR-814 TGti 75 6000 120 0.625
Table 7.2 Jabiru 3300 Specifications Ref [5] Maker Jabiru Model 3300 Cylinders 6 Displacement 200 cubic inches Bore 3.84 inches Stroke 2.91 inches Weight 180 lbf Power 100hp @ 2750rpm Fuel Cons. 5 US gal/hr @ 75%
7.2.1 Engine Power
The Jabiru 3300 aircraft engine puts out 100 horsepower at 2750 rpm, and is capable of a
maximum power output of 120 horsepower at 3300 rpm. One of the prime reasons it was chosen
over the other candidate engines is the extra power that it can produce.
7.2.2 Engine Power to Weight
The Jabiru 3300’s power to weight ratio is 0.562, which is comparable to most of the
others that it was compared to. The Rotax 912 ULS has a better ratio, but the high rpm and the
lack of ability to produce more power than the required minimum of 100 horsepower made it a
50

less suitable candidate than the Jabiru. The power to weight ratio that the Jabiru engine provides
for the entire aircraft is approximately 0.091.
7.2.3 Engine Cbhp
The Cbhp of the Jabiru 3300 engine is 0.46 lbf/hp/hr. This value is very close to other
engines with similar power ratings that were researched. The Jabiru uses approximately 5.0 US
gallons per hour at cruise and around 7.0 US gallons at 100% throttle.
7.3 Propeller Selection
The options for propeller selection are fixed pitch and constant speed variable pitch. The
number of blades to be used must be chosen as well. Beyond that, a radius has to be chosen that,
along with consideration of the horsepower of the engine, keeps the speed of the tips of the
blades below Mach 1. This is necessary to keep the noise level of the propeller to a minimum.
In researching different propellers, the number of blades was the first area that was
analyzed. The first consideration in choosing a propeller is that this aircraft will be taking off
and landing on improvised airstrips, which means that a good amount of clearance between the
propeller and the ground must be maintained. This fact pointed toward the use of a three blade
propeller due to the fact that a three blade prop can have a smaller radius than a two blade
propeller. Historical data was also looked into and it was found that many current crop dusters
use a three-blade propeller configuration.
A propeller radius that would both clear the ground and have a tip speed of less than
Mach 1 is the next requirement. The available clearance on all three design configurations is just
over 5 feet, so to ensure proper ground clearance during take off or landing, a radius of 4.5 feet
was chosen. This radius puts the helical tip speed of the propeller at 661 feet per second, which
is far less than Mach 1, and is a very good value in terms of noise reduction.
51

The next consideration to take into account is whether or not the propeller will be
constant pitch or constant speed with a variable pitch. The main advantage of a variable pitch
propeller is that it can change the engine’s thrust without having to change the engine power or
the speed of the propeller. It can also be used to create reverse thrust to decrease the landing
distance of the aircraft. Due to these advantages, a variable pitch propeller was chosen for this
design. The analysis of such a propeller, however, is more complicated than that of a fixed pitch
propeller. Due to this complication, this concept design’s propeller is treated as a fixed pitch
propeller of the same radius. An area for future work in this area is to be a study into whether or
not the variable pitch propeller would actually perform better than the fixed pitch prop in this
setting.
The propeller that was chosen for this design is the Airmaster AP332 fully feathering
propeller, which comes with a controller that can be preset with propeller speeds for each
segment of a flight, which in the case of an unmanned aircraft, would be ideal. This propeller
was designed specifically for the Jabiru 3300 engine, which also makes it a prime candidate for
use in the design.
7.3.1 Propeller Efficiency
The efficiency of this propeller was found to be approximately 0.75, which is a
reasonable value for this mission.
Table 7.3 Propeller Specifications Ref [4] Maker Airmaster Model AP332 Diameter 4.5 feet Hub Diameter 10 inches Blade Length 22 inches Blade Chord 2.5 inches Helical Tip Speed 661 feet/second Efficiency 0.75 Static Thrust 380 lbf
7.3.2 Propeller Thrust
52

The AP332 propeller with a 4.5 foot diameter generates a static thrust of approximately
380 lbf. The thrust required for takeoff and landing, and cruise are 356.68 lbf and 245.5 lbf
respectively, and thus the engine and propeller meet these requirements for each leg of the
mission.
7.4 Fuel and Fuel Storage
Table 7.4 Thrust and Fuel Consumption Mission Leg Time
(min) Power Required
(%) Fuel Cons.
(gph) Velocity
(ft/s) Thrust
(lbf) Fuel Used
(gal) TSFC
(lb/h/lbf) Takeoff 2 100 7 115.65 356.68 0.23 0.120 Climb 3 100 7 145 284.50 0.35 0.148 Cruise 12 75 5 168 245.50 1.00 0.122 Turns 3 75 5 168 245.50 0.25 0.122
Descent 3 100 7 125 330.00 0.35 0.128 Landing 2 100 7 115.65 356.68 0.23 0.120
Ferry 6 75 5 168 245.50 0.50 0.122 Reserve 20 100 7 168 245.50 2.33 0.172
Total 51 ----- ----- ----- ----- 5.24 -----
The current fuel tank setup has room enough for 15.12 gallons of fuel in all three design
configurations. This is so that the airplane can spray multiple fields on one tank of fuel and
saves the customer from having to refuel the aircraft before each field is done. The fuel that the
Jabiru 3300 uses is Avgas 100/130, which has a density of 6.02 lb/gal.
7.5 Trade Study on Propeller Diameter
A trade study was conducted on the effects of different propeller diameters. The
boldfaced values in Table 7.5 are those that are to be used in the design. As shown in Figure 7.1,
propeller efficiency increases as a function of diameter. A 1.25 foot increase in propeller
diameter increases the efficiency of said propeller by 22%. The trade off here is that the
propeller cannot be so large that it becomes too heavy or impacts the ground during takeoff or
landing.
Table 7.5 Effects of Propeller Diameter
53

Diameter (ft) Advance Ratio Corrected Advance Ratio
Cp Ct/Cp Propeller Efficiency
Static Thrust (lbf)
4.5 0.8146 0.7706 0.1346 1.3 0.75 381.3 4 0.9164 0.8537 0.2426 0.8 0.63 264
4.25 0.8625 0.8103 0.1792 1 0.72 310.6 4.75 0.7717 0.7343 0.1027 1.71 0.79 475.2
5 0.7331 0.7011 0.0795 2.2 0.83 580.8 5.25 0.6982 0.6705 0.0623 2.4 0.85 603.4
0
0.2
0.4
0.6
0.8
1
4 4.25 4.5 4.75 5 5.25
Propeller Diameter (ft)
Prop
elle
r E
ffici
ency
Figure 7.1 Propeller diameter vs. propeller efficiency.
0100200300400500600700
4 4.25 4.5 4.75 5 5.25
Propeller Diameter (ft)
Stat
ic T
hrus
t (lb
)
Figure 7.2 Propeller diameter vs. static thrust.
54

As shown in Figure 7.2, thrust also increases as a function of propeller diameter. The
trade off here is whether or not the extra thrust that a larger propeller diameter provides is
needed. In the case of the crop duster design, the considerations that need to be taken into
account are how large the propeller can be in order for it to be clear of the ground on an
improvised airstrip, and an approximation of how much thrust will be needed. As shown in the
figures, a larger propeller would be better in terms of efficiency, but due to the takeoff and
landing conditions, the required thrust has to be the limiting factor. The propeller in this case
should be as small as possible while still maintaining the required thrust for the airplane. Since
the takeoff thrust, which is the maximum required thrust, is 356.68 lbf, and the 4.5 foot diameter
propeller provides enough thrust to cover that requirement, it is the ideal choice. If the
conditions of the flight were different, such as a smooth paved runway for takeoff and landing, a
larger propeller could be considered to increase efficiency.
7.6 Future Work
Some areas that will require work in the future are the engine type, propeller type, and the
effects of aerodynamic forces on the propulsion system. A more thorough study of alternative
engine types, including ethanol fuel engines and a fully electric engine needs to be done in the
future. Research into the effects of having a variable pitch propeller as opposed to a fixed pitch
propeller will also be done. Once a thorough study of the aerodynamics and performance of the
final design is completed, it will be possible to get more accurate data regarding the propulsion
system’s losses.
55

8. Stability and Control (CK)
8.1 RFP Requirements
The most basic requirement for static stability of an aircraft is ensuring that the center of
gravity is ahead of the neutral point (location where 0MC =α
∂∂
) as specified in the data
requirement of the RFP. This guarantees that disturbances to the aircraft pitch will create a
restoring force proportional to the perturbed angle of attack thus return the aircraft to steady,
level flight. This will ensure our aircraft will handle without any stability augmentation system
or computer controlled flight surfaces. This lack of complicated stability augmentation devices
aligns well with the RFP requirement that our agricultural aircraft be both affordable to
underdeveloped countries and made from inexpensive off the shelf parts. First, however, to find
an aircraft's neutral point it is first necessary to find proper control surface sizes.
8.2 Tail Sizing
With the Constraint Analysis from the performance person, enough information is known
to do a preliminary stability and control analysis. This provides the necessary information in
finding the reference area and aspect ratios of an aircraft's horizontal and vertical tail which is
based primarily on the historic quantities known as tail volume ratios. For both the biplane and
our monoplane configuration the horizontal tail volume coefficient of 0.5 was used [Ref. 1], and
the vertical tail volume coefficient of 0.05 [Ref. 9] was used assumed to provide sufficient yaw
stiffness. From these tail volume coefficients, the reference area of the vertical tail ( vS ) and the
reference area of the horizontal tail ( hS ) were found. Also the aspect ratio of the horizontal tail
( hAR ) and the aspect ratio of the vertical tail ( vAR ) are generally around 4.5 and 2.75
respectively [Ref. 8]. The results of these calculations are tabulated here.
56

Table 8.1 TailGeometry Aircraft Type Monoplane Biplane Blended Wing Body
Sh (ft2) = 15.1857 16.4923 N/A Sv (ft2) = 10.1287 11.7204 9.5514
ARh = 4.5000 4.5000 N/A ARv = 2.7500 2.7500 2.7500
It should be noted that the third aircraft concept that X-Duster team is considering is the
blended wing body but calculation of tail areas using tail volume ratios does not apply because
tail volume ratios are based on historic data for more conventional configurations, not blended
wing bodies. For blended wing bodies directional control and the necessary vertical tail are quite
small. For example, the YB-49 only needed small vertical tails [Ref. 1]. Since no exact
calculations for tail sizing are available, a comparison to similar sized flying wings (such as
mentioned YB-49) and other blended wing bodies such as Boeing-Blended-Wing Concept was
used as historic data to estimate our vertical tail size.
The length of the fuselage was chosen to be a minimum in order to reduce hollow
sections on the inside of the structure. This reduces both the excess weight while also reducing
wetted area with respect to the fuselage even though this did lead to larger elevators. A future
trade study will be necessary to compare aircraft weight gains or losses for various tail volume
ratios.
8.3 Static Margin
Static margin is the distance (as a percentage) between the center of gravity and the
neutral point of the aircraft normalized by the main wing's mean chord. This is defined as
positive when the center of gravity is ahead of the neutral point and negative for a neutral point
ahead of the center of gravity. These neutral points were calculated with the goal of having a
static margin between positive 5% and 19% [Ref. 1]. This ensured static stability of each design
which implies the airplane will return to steady and level flight upon any turbulence without any
57

flight control inputs. This stability would make for easy implementation of the autonomous flight
control program.
In order to find the static margins, various data from both the Constraint Analysis and
historical values from Raymer were used. Now of course, having the specified range of static
margin (5% - 19%) implies that the aircraft center of gravity be oriented 5% - 19% ahead the
aircraft's neutral point. Thus considerable coordination with the Configuration's person was
involved in adjusting the configuration of the aircraft until the center of gravity did indeed ensure
a static margin between 0.05 and 0.19. The formula for calculating neutral point is based on
parameters like the lift curve slopes of the main wing's airfoil, distance between aerodynamic
centers, reference areas, etc. Most importantly the neutral point is only a function of the
geometry which for each configuration is constant throughout the entire flight. So the neutral
point remains fixed and independent of c.g. shift. These neutral point locations, Xnp, are
tabulated as follows.
Table 8.2 Neutral Point Locations Aircraft Type
Monoplane Biplane Blended Wing Body Xnp = 0.3540 0.2573 0.4352
For the monoplane the neutral point is the distance behind the main wing's leading edge
as a percentage of the mean chord. For the biplane the neutral point location is the distance
behind the lower wing leading edge as a percentage of the lower wing mean chord. And the
blended wing body's neutral is with respect to the nose of the aircraft as a percentage of the entire
aircraft's length.
For the blended wing body the same formula could not be used. Since the blended wing
body in our design is very nearly a flying wing, the neutral point of a wing is the aerodynamic
center. And in low speed subsonic flight the aerodynamic center is most nearly the quarter chord.
58

So the mean quarter chord was found, which gives a good estimate of the neutral point in a very
complex blended wing body.
The center of gravity evolves during the mission profile. So to ensure static stability in
the acceptable range over the entire flight profile, the center of gravity as a function of time was
found for these cases: empty aircraft c.g. location, fueled aircraft c.g. location, liquid payload and
fueled c.g. location, and solid payload and fueled c.g. location with linear variation due to fuel
burn and payload drops. These four configurations represent the extreme c.g. locations, thus in
preliminary stability and control design the static margin was calculated for each c.g. locations
with the above calculated neutral points.
Table 8.3 Static Margin Evolution Static Margin (%c) Mission Profile Segment Monoplane Biplane BWB Empty 15.020 14.514 7.762 Fueled (No Payload) 18.200 16.957 10.067 Fully Fueled with Full Liquid Payload 3.290 2.492 7.414 Fully Fueled with Full Solid Payload 1.010 0.338 7.007
As seen in the previous table the monoplane, biplane, and blended wing body remain
statically stable over the entire mission, although one issue that may need resolved in further
design is the large static margin shift. For example in the monoplane the static margin changes
from 1% to 18%. However since the aircraft is trimmable it will still be able to maintain steady
level flight.
8.4 Control Surface Sizing
In very much the same manner that tail sizes were found, initial estimates of control
surface areas are also based on historic data. Typically both the elevator and the rudder are 25%
59

of their respective tail sizes. This applies well for both the monoplane and the biplane [Ref. 7].
The results of this calculation, rudder area rS and elevator area eS , are tabulated in the following
table.
Table 8.4 Control Surface Area Aircraft Type Monoplane Biplane Blended Wing Body
Sr (ft2) 2.5322 2.9301 2.3878 Se (ft2) 3.7964 4.1231 N/A
Again, the blended wing body tends to be an exception as it does not have an elevator.
Elevons would have to be used on the blended wing body because they would control both the
roll and pitch of the aircraft with a lack of tail. Elevon reference areas are likely beyond the
scope of this course, so if blended wing body proves to be the most viable option, future research
would be done of how to size elevons.
8.5 Trim Analysis
An aircraft does not necessarily have to be stable in order to fly even if it lacks stability
augmentation. For example the Wright Flyer was mildly unstable, but because it was trimmable
the Wrights could keep it in the air. Thus ensuring our aircraft is both statically stable (as above
from positive static margin) and trimmable yields a very well behaved aircraft. Trim ensures that
the tails and control surfaces can produce enough torque to cancel any pitching moment from the
main wings and the aircraft can recover from maneuvers to steady level flight.
A trim plot is the best graphical way to see both the results of trim analysis and
simultaneously shows the aircraft static stability. The plot simply shows the moment coefficient
( MC ) as a function of LC (or equivalently angle of attack) for various static margins. The slope
of this plot ignoring propulsion effects is the negative of the static margin which implies the
aircraft is statically stable. And the MC intercept is the zero lift pitching moment coefficient.
60

-0.05
-0.04
-0.03
-0.02
-0.01
0.00
0.01
0.02
0.03
0.04
0.05
-0.20 0.00 0.20 0.40 0.60 0.80 1.00 1.20 1.40 1.60 1.80
CL
CM
Monoplane EmptyMonoplane Payload and FueledBiplane EmptyBiplane Payload and FueledBWB EmptyBWB Payload and Fueled
Figure 8.2 Required 'LC s for various configurations to be in trim.
The results here most importantly show the required 'LC s for our aircraft to be trimmed.
And from the aerodynamicist it is known that these 'LC s are obtainable because NACA 2412
does not stall until . Thus the monoplane, biplane, and blended wing body are all
trimmable and statically stable for all portions of our mission profile which makes them all
viable options from a static stability viewpoint.
1.6LC =
8.6 Trade Study – Static Margin's Effect on Trim
A trade study was performed on how the trimmed LC was affected by changing the static
margin. This analysis is a graphical way of seeing how a configuration change (thus c.g. location
change or similarly static margin change) would influence the necessary LC for trim. This shows
whether or not it is possible to trim the monoplane aircraft at various static margin values. In a
61

sense this also demonstrates how much the aircraft’s center of gravity can be changed while still
having a trimmable aircraft.
-0.15
-0.13
-0.11
-0.09
-0.07
-0.05
-0.03
-0.01
0.01
0.03
0.05
-0.2 0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8
CL
CM
SM = 0 SM = .025 SM = .05 SM = .10 SM = .15
Figure 8.2 Trim analysis with varying static margins.
The most important result here is that for the monoplane design, with our current airfoil with a
maximum LC = 1.6 ( LC stall) the static margin must remain above 1.5% which is where the
static margin would intersect 0MC = .
8.7 Future Considerations
A few considerations will be necessary when a more detailed design takes place. One
issue as previously mentioned was the large center of gravity shift throughout the mission. While
the monoplane, biplane, and blended-wing-body all remain statically stable, their static margins
change significantly during flight. This is due to the fact that the payload hopper/tank is quite far
from the empty aircraft’s c.g. It will be wise to consider alternative payload locations closer to
the empty c.g. in future, more detailed design.
62

If the blended-wing-body does prove to be the most viable option, more technical data
and design philosophy for blended-wing-bodies should be found. The current neutral point
approximation may prove to not to be precise. Also elevons tend to be more trade secrets since
they are primarily used on military aircraft like the B-2 so sizing of them may prove difficult.
Finally and most importantly, static stability is only the beginning in determining how the
aircraft design will fly. Yaw and roll stability in addition to longitudinal dynamic stability will
further complicate the design but yield more precise handling characteristics. For example, the
blended-wing-body concept may be statically stable, but when it enters a turn it could spiral out
of control, or go into a Dutch roll. These are examples of multiple axes of rotation coupled
together and will be necessary stability and control analysis outputs in future work.
9. Cost Analysis (WH)
9.1 Development of Cost Model
The DAPCA IV Cost Estimation Relation, developed by the Rand Company, and
presented in Raymer, was used for preliminary cost estimation for the aircraft. Unfortunately the
DAPCA IV CER does not apply well to the aircraft because it is modeled primarily for tactical
fighter aircraft and commercial transport aircraft. With this in mind it was decided to use a
modified version of the DAPCA IV model that would help to alleviate the problem associated
with applying it to this aircraft. This modified version included using engine cost data from the
engine manufacturing company, selecting appropriate avionics components and creating a total
avionics cost from the cost of each component. The preliminary idea is for an autonomous
63

aircraft; to account for this the avionics cost includes advanced computer hardware and software
for the aircraft to run autonomously. The modified DAPCA IV model was modified further for
the blended wing body configuration. This modification primarily was a modification in the
manufacturing and avionics cost. The blended wing body configuration has inherent
manufacturing obstacles that produce a high cost; the manufacturing cost would increase for the
blended wing body because of the structure’s complexity. As a way to counteract the high
manufacturing cost, a possible solution of composites was proposed. However, the combined
material cost for composites along with no structural advantage gained using composites,
deemed composites unnecessary. The DAPCA IV model uses the calculated empty weight and
maximum velocity and the number of aircraft produced in a five year production run. The
modified DAPCA IV model output a total research, development, engineering, testing and
flyaway cost that varied with the production run number.
To calculate a preliminary operating a cost, a cost estimation relation was created for the
aircraft application. The operating cost used fuel data from the engine manufacturing company
and current costs for the operational fuel required by the selected engine. An annual insurance
cost was estimated from historical data of similar aircraft. An hourly maintenance cost was
estimated considering the fact that most farmers will attempt self repairs on the aircraft. A
training cost was estimated with the preliminary idea that the aircraft would be autonomous with
manual back up and over-ride and the operator would need to be trained mostly in the use of the
software to set up the flight path. The lifespan of the aircraft was estimated from historical data
of agricultural aircraft and historical data of hourly usage for a year. The operating cost model
output a cost per year, cost per hour heavily dependent on the number of hours that the aircraft
was used in a calendar year.
64

9.2 Cost Breakdown
The flyaway cost produced by the modified DAPCA IV CER allows for calculation of
the cost for certain specialized technical areas. The percentage of total flyaway cost for each
aircraft production area was calculated and is shown in Figure 9.1.
9%
1%
48%
15%
7%
10% 0% 7%1%
2%Avionics
Spray System
Manufacturing
Materials
Qualtiy Control
Tooling
Training
Propulsion
Flight Testing
Development Support
Figure 9.1 Production cost breakdown.
Figure 9.1 shows that the flyaway cost of the aircraft relies heavily on the manufacturing cost.
The next influential component is the materials and following that is the avionics.
Manufacturing’s heavy influence on a production price is indicative of the large amount of time
devoted to building an aircraft. Even though the aircraft is designed to be composed of mostly
“off the shelf” parts, the main material of the air aluminum is not readily available in the
preformed parts of a fuselage, wing structure and empennage. This explains why the materials
cost is an influential part of the aircraft even with “off the shelf” parts. Using the preliminary
design of an autonomous aircraft the avionics cost includes the ground support software and
hardware and the advanced aircraft software for monitoring the flight, weather and spray pattern.
9.3 Cost vs. Production Run
65

As shown in Figure 9.2 the flyaway cost decreases exponentially with the number of
aircraft produced in five years.
$0
$1,000,000
$2,000,000
$3,000,000
$4,000,000
$5,000,000
$6,000,000
$7,000,000
$8,000,000
$9,000,000
$10,000,000
0 100 200 300 400 500
Production Run in 5 Years
Cost
($)/A
irpl
ane
Figure 9.2 Cost vs. production.
The flyaway cost per airplane decreased as expected because many aspects of the production are
reused, and the modified DAPCA IV model accounts for a learning curve of the manufacturing
and tooling laborers. The high cost for a single aircraft production run is explained by the high
cost for the tooling, manufacturing, and materials is entirely devoted to one aircraft. Shown
below in Table 9.1 is the flyaway cost for production runs of 50, 100 and 500 aircraft.
Table 9.1 Production Run and Cost/Airplane($) Production Run Amount Cost/Aircraft($)
50 $850,000.00 100 $630,000.00
500 $350,000.00
9.3 Cost vs. Fuel Cost
66

As shown in Figure 9.3 as the cost of the required fuel increases the cost per hour of
usage increases linearly.
$0.00
$10.00
$20.00
$30.00
$40.00
$50.00
$60.00
$70.00
$80.00
$3.00 $3.50 $4.00 $4.50 $5.00 $5.50 $6.00 $6.50 $7.00
Fuel Cost($)
Oper
atio
n Co
st/H
our($
)
Figure 9.3 Cost vs. fuel cost.
Considering that the general national trend is a rise in fuel cost per gallon the operating cost was
studied for increasing fuel costs. The linear increase in operation cost per fuel cost per gallon is
as expected because the operating cost relies heavily on the amount of fuel used per hour.
Possible remedies to the problem of high operating costs due to a rise in fuel is researching
alternative fuel sources, or researching a different, more fuel efficient engine.
9.4 Future Cost Analysis Work
In the future more historical data needs to be investigated to create a proper cost model
for the aircraft application. More trade studies can be done to investigate the operational cost
and flight time cost. The propulsion systems need to be studied to see if any modification can be
made to find a more fuel efficient engine, or an engine that uses different fuel. Since the main
driving factor of the flyaway cost was the manufacturing time, trade studies in reducing
67

manufacturing time need to conducted to reduce the flyaway cost. The material needed for the
aircraft were a considerable percentage of the flyaway cost, to investigate possible flyaway cost
reductions trade studies in reducing the materials cost need to be conducted. These include
researching less expensive materials or decreasing the weight, and therefore using less material
which will in turn decrease the flyaway cost. An analysis of cost effectiveness of cost per acre of
sprayed crop needs to be completed to be compared to other aerial application solutions.
10. Ground Operations
10.1 Aircraft Control
As a preliminary judgment the optimum operation of the aircraft is a completely
autonomous aircraft with a manual back-up/over-ride. The reasoning behind this is that if a pilot
is required the operating costs will climb significantly from the baseline operating costs
presented in this report. While the individual farmer could be trained as the pilot, his time is
better served as doing other work while the aircraft performs the aerial application on its own.
Due to the autonomous aspect the avionics cost was increased for an advanced software and
computer that would be needed to monitor the aircraft’s airspeed and the wind speed and
direction as well as the flow rate of the product being applied.
10.2 Ground Control Components
The ground station includes advanced software for piloting the aircraft, determining the
optimum flight path around the field of operation, monitoring the flow rate and the coverage of
the product over the field. The ground control would consist of the computer which will be the
user interface with the aircraft, on the computer display during flight there will be flight data as
can be seen in manned aircraft. The computer will also have a joystick for a manual back-
68

up/over-ride. The ground control station will also consist of two of its own weather stations that
can be stationed at user specified locations to monitor the weather in the vicinity of the field.
The computer interface would require a certain amount of training, this is included in the
flyaway cost at approximately $1000.00 and would take approximately one day to complete.
10.3 Future Work in Ground Operations
The ground operations will be totally designed in the future. Studies will be done to
determine which components are entirely necessary for the ground operations. Design ideas for
the ground control station will include an integrated design station on the tow trailer or a ground
control container that will contain all of the ground hardware and can be loaded on to a pick up
truck and towed along with the aircraft to the desired location.
Conclusion
After going through the first stages of analysis on all three aircraft variants, it was
apparent that the monoplane was the better choice for fulfilling the RFP. The monoplane itself
had the benefits of simplicity in both design and manufacturing, which is one of the main goals
of the RFP in order to allow for export. The only real drawback was in transport of the aircraft
given its larger wingspan, but this can be overcome by giving it folding wings that are simple to
deal with as the fuel tanks take up only half the wing span.
The other variants on the other hand have numerous significant design problems
compared to the monoplane design. The biplane variant, while still relatively conventional and
low cost as the monoplane was, ended up being at best neutrally stable. This would render it
harder to control in flight, putting greater demands on the control systems. Additionally, the
69

smaller wingspan which would aid in transport of the craft actually hindered the design in that it
reduced the effective spray area on each pass; in effect doubling the number of passes to cover a
given area versus the monoplane. This, coupled with a much higher turning radius, made the
biplane a much less efficient crop duster compared to the monoplane even with the slight weight
and size benefits.
The main problem that arose with the blended wing body was the innate complexity in
the design that hindered analysis. However, what analysis that could be done indicated that it
also was not a viable option when compared to the conventional monoplane. The blended wing
shared the same problem as the biplane in that the effective spray area was half the monoplane;
however its turning radius was not as large as the biplane, making it slightly more efficient. In
this and other areas the blended wing performed better or at least on par with the biplane. There
was one main problem though that would arise for the blended wing body that would discount it
regardless of performance, and that was the cost of each unit. To manufacture a blended wing
body aircraft would require much more complex, and therefore expensive, manufacturing
processes than either of the more conventional variants. This ends up going against the
affordability requirements of the RFP. Additionally, the simple fact that it is an unconventional
design irregardless of cost makes it less likely to be adopted by any group of consumers.
In light of all of these reasons, it is clear that the variant of choice with which to continue
on to a detailed design is the conventional monoplane. This variant was able to best fulfill by far
out of the three the RFP requirements for the Agricultural Unmanned Aircraft System.
70

References
[1] Raymer, D., Aircraft Design: A Conceptual Approach Third Edition, AIAA Education Series, Reston, VA, 1999. [2] Gay, Daniel, Hoa, Suong V. and Tsai, Stephen, “Conception and Design,” Composite Materials: Designs and Applications, CRC Press, New York, 2003, pp. 87-101. [3] Anderson, Jr., John D., Aircraft Performance and Design, WCB/McGraw-Hill, Boston, MA, 1999. [4] “Airmaster Products – AP332”, 2001, http://www.airmasterpropellers.com/wa.asp?idWebPage=3454 [5] “Jabiru 3300 120 hp Engine”, http://www.usjabiru.com/jabiru_3300.htm [6] “Ultralight Engines”, http://www.ultralightnews.com/engineinfo/index.html [7] Chevalier, Howard, Model Airplane Design and Performance for the Modeler, ChallengeEngineering, Inc., New Baden, TX, 1993. [8] Lennon, Andy, R/C Model Aircraft Design, Air Age Inc., Ridgefield, CT, 1996. [9] Jones, Dave, "Fins and Rudders". Quiet Flight International, No. 17, Traplet Publications, Severn, England, Oct./Nov. 1995.
71

Appendix A.1 Structures V‐n & Trim Diagram MATLAB Code function AE440_Trim_Diagram_Mono() % Michael Duffy AE440 Conceptual Design Report % ----- % Monoplane Trim Diagram % ----- % Airfoil data; row vector of values in order [col1, col2, col3, col4] = textread('NACA2412.data','%f%f%f%f%*[^\n]','delimiter',' '); alpha = [col1].'; C_l = [col2].'; C_d = [col3].'; C_m_w = [col4].'; % Calculate wing force values based on angle of attack C_z_w = zeros(1,length(alpha)); C_x_w = zeros(1,length(alpha)); for i = 1:length(alpha) if alpha(i) > 0 C_z_w(i) = C_l(i)*cosd(alpha(i))-C_d(i)*sind(alpha(i)); C_x_w(i) = C_d(i)*cosd(alpha(i))+C_l(i)*sind(alpha(i)); elseif alpha(i) == 0 C_z_w(i) = C_l(i)*cosd(alpha(i)); C_x_w(i) = C_d(i)*cosd(alpha(i)); else alpha(i) < 0; C_z_w(i) = C_l(i)*cosd(alpha(i))+C_d(i)*sind(alpha(i)); C_x_w(i) = C_d(i)*cosd(alpha(i))-C_l(i)*sind(alpha(i)); end end % Calculate tail force values c_w_mac = 3.115; % wing mean aerodynamic chord (feet) l_t = 5.906; % horizontal distance of tail AC BEHIND plane CG (feet) l_wb = -.312; % horizontal distance of wing AC BEHIND plane CG (feet) C_z_t = (c_w_mac./l_t).*C_m_w - (l_wb./l_t).*C_z_w; %h_t = -.594; % vertical distance of tail AC BELOW plane CG (feet) %h_wb = .147; % vertical distance of wing AC BELOW plane CG (feet) %C_x_t = (c_w_mac./h_t).*C_m_w - (h_wb./h_t).*C_x_w; C_x_t = 0; % Assume for early models that the tail is parallel with the wing % Calculate total force values C_z_total = [C_z_w + C_z_t]; C_x_total = [C_x_w + C_x_t]; % Plot all the values versus angle of attack figure plot(alpha,C_z_total,'k-','linewidth',2) hold on grid on plot(alpha,C_x_total,'k--','linewidth',2) plot(alpha,C_z_w,'r-','linewidth',2) plot(alpha,C_x_w,'r--','linewidth',2) plot(alpha,C_z_t,'b-','linewidth',2) % plot(alpha,C_x_t,'g--','linewidth',2) plot(alpha,C_m_w,'g-','linewidth',2) legend('C_ztotal','C_xtotal','C_zw','C_xw','C_zt','C_mw','location','eastoutside') title('Monoplane Wing Trim Curves') xlabel('Angle of Attack Alpha (degrees)') ylabel('Coeffecient Value')
72

function AE440_Vn_Diagram_Mono() % Michael Duffy AE440 Conceptual Design Report % ----- % Monoplane V-n Diagram % ----- % Design values rho = 0.002378; % density (slug/ft^3) W_o = 1360.4; % gross weight (lbf) S_w = 64.46; % wing planform area (ft^2) V_c = 168; % cruise velocity (ft/s) V_d = 1.3*V_c; % dive velocity (ft/s) c_w_mac = 3.115; % mean aerodynamic chord (feet) C_l_alpha = 6.2069; % Lift slope coefficient l_t = 5.906; % horizontal distance of tail AC BEHIND plane CG (feet) l_wb = -.312; % horizontal distance of wing AC BEHIND plane CG (feet) U = 30; % Vertical gust velocity (ft/s) [raymer 395] mu = 2*(W_o/S_w)/(rho*32.7*c_w_mac*C_l_alpha); K = .88*mu/(5.3+mu); KU = K*U; % effective gust velocity (ft/s) n_max = 4.4; % max load factor - utility aircraft [raymer 392] n_min = -1.8; % min load factor - utility aircraft [raymer 392] % Airfoil data [col1, col2, col3, col4] = textread('NACA2412.data','%f%f%f%f%*[^\n]','delimiter',' '); alpha = [col1].'; C_l = [col2].'; C_d = [col3].'; C_m_w = [col4].'; % Calculate wing force values C_z_w = C_l.*cosd(alpha)+ C_d.*sind(alpha); % Calculate tail force values C_z_t = (c_w_mac./l_t).*C_m_w - (l_wb./l_t).*C_z_w; % Calculate total force values C_z_total = [C_z_w + C_z_t]; % Calculate limiting velocity values V_a = (n_max/(1.25*max(C_z_total)*rho/(2*(W_o/S_w))))^.5; V_g = (-n_min/(max(C_z_total)*rho/(2*(W_o/S_w))))^.5; % Create velocity function matrices V_upper = linspace(0,V_a,100); V_lower = linspace(0,V_g,100); n_upper = (1.25*max(C_z_total)*rho/(2*(W_o/S_w))).*V_upper.^2; n_lower = -(max(C_z_total)*rho/(2*(W_o/S_w))).*V_lower.^2; % Create gust function matrices i = max(size(C_z_total)); a = (C_z_total(i)-C_z_total(i-1))/((alpha(i)-alpha(i-1))*pi/180); V_range = linspace(0,V_d,150); n_g_upper = 1 + rho.*KU.*a.*V_range./(2*(W_o./S_w)); n_g_lower = 1 - rho.*KU.*a.*V_range./(2*(W_o./S_w)); % Plot the Vn Diagram figure plot(V_upper,n_upper,'r-','linewidth',2) plot([0,1.1*V_d],[0,0],'k-','linewidth',2) hold on grid on plot(V_upper,n_upper,'r-','linewidth',2) plot(V_lower,n_lower,'r-','linewidth',2) plot([V_g,V_c],[n_min,n_min],'r-','linewidth',2)
73

plot([V_c,V_d],[n_min,-1],'r-','linewidth',2) plot([V_a,V_d],[n_max,n_max],'r-','linewidth',2) plot([V_d,V_d],[-1,n_max],'r','linewidth',2) plot(V_range,n_g_upper,'b--','linewidth',2) plot(V_range,n_g_lower,'b--','linewidth',2) plot([V_d,V_d],[min(n_g_lower),max(n_g_upper)],'b--','linewidth',2) plot([V_c,V_c],[n_min,0],'g-','linewidth',2) plot(V_d,n_max,'ko','linewidth',2) plot(V_a,n_max,'ko','linewidth',2) plot(V_g,n_min,'ko','linewidth',2) axis([0,1.1*V_d,-3,5]) title('Monoplane V-n Diagram') xlabel('Velocity, V (ft/s)') ylabel('Load Factor, n') text(V_a,n_max,[' V_a = ',num2str(V_a)],'VerticalAlignment','bottom','HorizontalAlignment','right') text(V_g,n_min,[' V_g = ',num2str(V_g)],'VerticalAlignment','top','HorizontalAlignment','right') text(V_d,n_max,[' V_d = ',num2str(V_d)],'VerticalAlignment','bottom','HorizontalAlignment','left') text(V_c,0,[' V_c = ',num2str(V_c)],'VerticalAlignment','bottom','HorizontalAlignment','center') text(V_a,n_max,[' High AoA '],'VerticalAlignment','top','HorizontalAlignment','right') text(V_d,n_max,[' Max q '],'VerticalAlignment','top','HorizontalAlignment','left') text(max(V_range),max(n_g_upper),[' + Dive Gust '],'VerticalAlignment','middle','HorizontalAlignment','left') text(max(V_range),min(n_g_lower),[' - Dive Gust '],'VerticalAlignment','middle','HorizontalAlignment','left')
74

Appendix A.2 Stability and Control: Equations Used A.2.1 Tail volume ratios to find vertical tail and horizontal tail reference areas
.05.05
.5.5
v vvt v
v
h hht h
h
S l S bc = = S =Sb lS l S cc = = S =Sc l
⋅ ⋅⇒
⋅ ⋅⇒
(A.2.1)
A.2.2 Neutral Point Calculation ignoring propeller effects since thrust line almost goes through c.g. Assuming aerodynamic center at quarter chord:
14acw
x = c⋅ , 0.90hη = , 2F FFMα fus
K W LC =
cS ,
4ac hh
cx = l + , 1hα ε=α α
∂ ∂−
∂ ∂ (A.2.2-6)
h hL ac M h L acα w α α hfus h
nph h
L h Lα αh
S αC x C +η C xS αx = S αC +η C
S α
∂⋅ −
∂∂∂
(A.2.7)
A.2.3 Blended Wing Body Neutral Point Sample Calculation Weighted average of fuselage neutral point and wing neutral point:
np, fus fus np,w wnp
fus w
x S + x Sx =
S + S, np
np
xx =
l (A.2.8-9)
A.2.4 Static Margin Calculation
S . M .=�xnp− �xcg
�c (A.2.10)
A.2.5 Trim Analysis
0 w t
t tM M L o
S lC C CScα α
α ε= +o
, M L MM C CC S− ⋅ + (A.2.11-12) =
75

Appendix A.3 Thrust vs. Velocity Curve and Propeller
Figure A.1 Thrust vs. velocity for Jabiru 3300.
Figure A.3.1 Thrust vs. velocity curve.
Figure A.3.2 Airmaster AP332 fully feathering propeller.
76

Appendix A.4 Aerodynamics Equations L=qSCL,
1KAeπ
= , ,0.681.78(1 0.045* ) 0.64e A= − − max max 0.250.9 cosL lC C c= Λ (A.4.1-4)
exposed
22 2refmax
2 2
2 ( )tan2 4 1
L
t
SAC FSA
απ
βη β
⎛ ⎞= ⎜ ⎟
⎛ ⎞ ⎝ ⎠Λ+ + +⎜ ⎟
⎝ ⎠
(A.4.5)
2 21 Mβ = − , 2 /
lC αηπ β
= , 0wet
D feref
SC CS
= (A.4.6-8)
( ) ( )c
misc L&P
f0 subsonic
C * * * cc c wetD D
ref
FF Q SC C
S= + DC+∑ (A.4.9)
laminar 1.328 /fC R= , turbulent 2.58 2 0.6510
0.455(log ) (1 0.144* )fC
R M=
+, VlR ρ
μ= (A.4.10-12)
1.053cutoff 38.21( / )R l= k (A.4.13)
40.18 0.280.61 100 1.34* (cos )
( / ) mm
t tFF Mx c c c
⎡ ⎤⎛ ⎞ ⎛ ⎞ ⎡= + + Λ⎢ ⎥⎜ ⎟ ⎜ ⎟ ⎣⎝ ⎠ ⎝ ⎠⎢ ⎥⎣ ⎦⎤⎦ for Wing, Tail, Strut, Pylon (A.4.14)
3
601400
fFFf
⎛ ⎞= + +⎜⎝ ⎠
⎟ for Fuselage, 1 (0.35 / )FF f= + for Nacelle (A.4.15-16)
max(4 / )l lfd Aπ
= = , for Nacelle, 1 (0.35 / )FF f= +max(4 / )
l lfd Aπ
= = (A.4.17-19)
fuselage wing vtail htail cowlings1.0, 1.1, 1.03, 1.08, 1.5Q Q Q Q Q= = = = = (A.4.20)
feathered prop propeller disk( / ) .1D q Aσ= , max max
flappedH.L.
ref
0.9 cosL l
SC C
S⎛ ⎞
Δ = Δ Λ⎜ ⎟⎝ ⎠
(A.4.21-22)
flap0 flap flapped ref flap( / )( / )( 10)D fC F C C S S δΔ = − , 2 2flap / 4( ) cosDi f L cC k CΔ = Δ Λ (A.4.23-24)
1.5effective
1.5
33( / )1 33( / )
K h bK h b
=+
2 2
2
(1 )2
rer r
μμ σμ
+= 2+ +
(A.4.25-26)
77