[American Institute of Aeronautics and Astronautics 38th AIAA/ASME/SAE/ASEE Joint Propulsion...
12
AIAA 2002-4133 Optimal Shape Design of Super- sonic, Mixed-Compression, Fixed- Geometry Air Intakes for SSTO Mis- sion Profiles. Francesco Creta , Mauro Valorani β β β 1 2 S A 0 0 M X Y ξ Riemann M =1 th hyperbolic shock sonic line μ X0 m out m in continuity X0 8 β mass flow λ λ S B standoff . . S S cowl lip (vertex ) 38th Joint Propulsion Conference July 7–10 /Indianapolis, IN For permission to copy or republish, contact the American Institute of Aeronautics and Astronautics 1801 Alexander Bell Drive, Suite 500, Reston, VA 22091 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit 7-10 July 2002, Indianapolis, Indiana AIAA 2002-4133 Copyright © 2002 by the author(s). Published by the American Institute of Aeronautics and Astronautics, Inc., with permission.
Transcript of [American Institute of Aeronautics and Astronautics 38th AIAA/ASME/SAE/ASEE Joint Propulsion...
![Page 1: [American Institute of Aeronautics and Astronautics 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit - Indianapolis, Indiana (07 July 2002 - 10 July 2002)] 38th AIAA/ASME/SAE/ASEE](https://reader042.fdocument.org/reader042/viewer/2022020615/575095251a28abbf6bbf43a1/html5/page/1.jpg)
AIAA 2002-4133Optimal Shape Design of Super-sonic, Mixed-Compression, Fixed-Geometry Air Intakes for SSTO Mis-sion Profiles.Francesco Creta , Mauro Valorani
β
β β1
2
S
A0
0M
X
Y
ξ
Riemann
M =1th
hyperbolicshock
sonic line
µ
X0
moutm in
continuity
X0
8β
mass flow
λ
λ
S
B
standoff
. .
S
S
cowl lip
(vertex )
38th Joint Propulsion ConferenceJuly 7–10 /Indianapolis, IN
For permission to copy or republish, contact the American Institute of Aeronautics and Astronautics1801 Alexander Bell Drive, Suite 500, Reston, VA 22091
38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit7-10 July 2002, Indianapolis, Indiana
AIAA 2002-4133
Copyright © 2002 by the author(s). Published by the American Institute of Aeronautics and Astronautics, Inc., with permission.
![Page 2: [American Institute of Aeronautics and Astronautics 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit - Indianapolis, Indiana (07 July 2002 - 10 July 2002)] 38th AIAA/ASME/SAE/ASEE](https://reader042.fdocument.org/reader042/viewer/2022020615/575095251a28abbf6bbf43a1/html5/page/2.jpg)
Optimal Shape Design of Supersonic, Mixed-Compression,
Fixed-Geometry Air Intakes for SSTO Mission Profiles.
Francesco Creta∗, Mauro Valorani†
The problem of maximizing the performance of a fixed-geometry air intake geometry
of a vehicle accelerating over a wide range of flight Mach number is addressed. An exten-
sion of the Seddon-Goldsmith procedure is used to estimate the flow pattern involving a
curved bowshock, a triple point interaction, and wall shock reflection which characterizes
the subcritical regime of operations. The approximate model has been validated against
detailed CFD calculations of the flowfield about the air intake. Finally, the approximate
model is adopted to find the geometry which optimizes the fuel-to-mass ratio over a
constant dynamic pressure trajectory.
Introduction
The air intake is the most critical part of a super-sonic/hypersonic airbreathing propulsion system. Itmust deliver air to combustion chamber for a widerange of flight Mach number at a desired rate and flowconditions. This delivery must be accomplished by aslittle losses and drag as possible.
At high flight Mach number the compression processis accomplished by a succession of oblique shocks gen-erated both ahead (external compression) and insidethe converging part of the air intake (internal compres-sion). The supersonic compression ends at a normalshock located at or downstream the intake throat andmight be followed by further diffusion in the subsonicflow regime (ramjet).
The intake geometry needs to be properly shapedto achieve an optimal performance. This task is rel-atively manageable if the intake is to be operated atnearly constant free stream conditions, as it happensfor a cruiser type vehicle. However, a reusable air-breather launcher, such as a SSTO vehicle, attainsorbital speeds and heights by a continuous accelera-tion (accelerator type vehicle), which forces the airintake to operate over a wide range of flight Machnumbers and altitudes.2, 6 To obtain an envelope ofnearly optimal intake performance requires adoptinga variable-geometry intake strategy,13 with a multi-point design selection along the ascent corridor.
The air intake during off-design conditions displaysseveral flow regimes, classified as subcritical or super-critical according to whether the flow Mach numberis respectively below or above the design Mach num-ber. The subcritical regime is prompted by the need
∗Ph.D. Student; University of Rome “La Sapienza”,
Italy, Department of Mechanical and Aeronautical Engi-
neering, Via Eudossiana 18, 00184 Roma; e-mail address:
[email protected]†Associate Professor, Ph.D.; Senior Member AIAA; Univer-
sity of Rome “La Sapienza”, Italy, Department of Mechanical
and Aeronautical Engineering, Via Eudossiana 18, 00184 Roma;
e-mail address: [email protected]
Copyright c©2002 by F.Creta, M.Valorani. Published by the
American Institute of Aeronautics and Astronautics, Inc. with
permission.
of reducing the massflow captured by the intake soas to match the reduced massflow requirement elabo-rated by the engine, reduction that is accomplished byspilling air over the intake cowl lip. Spilling might oc-cur under both subsonic or supersonic flow conditions.Subsonic spillage involves the formation of a complexshock pattern ahead of the intake duct including astrong bow shock, whereas supersonic spillage can beaccomplished by oblique shock waves alone.
The off-design performance might be largely lowerthan at the design point. Before resorting to a whollyvariable-geometry intake strategy, it is important tounderstand how and under what conditions an opti-mal accelerator performance for a vehicle flying overa range of variable free stream conditions could beachieved by adopting a fixed-geometry intake.
Of special interest is to understand how to choosethe design point for a fixed-geometry intake, its geom-etry and how its overall performance evaluated overa flight corridor can be predicted. Clearly, compu-tational fluidynamics (CFD) can be used to obtainthe flowfields about the intake at different free-streamconditions for several intake geometries, and nextderive the overall performance prediction from thisdatabase.5 This procedure is very time consuming andat the design stage it is preferable to adopt a ”lighter”tool of analysis and to postpone the use of CFD toolsin the verification stage of the design process.
In this paper, we illustrate a procedure to attainan intake shape optimal over a flight corridor whosecore tool is an approximate, algebraic, model of theshock pattern developed during the subcritical opera-tion regime.
This approximate shock model allows us to pre-dict the intake off-design performance with a minimalcomputational effort thus allowing for a parametricinvestigation of very many intake shape designs andultimately for an automatic design procedure to beimplemented. Moreover, the simplification process fol-lowed to obtain the approximate shock model allows usto pinpoint the main mechanisms governing the inter-action between the shock pattern ahead of the intake
1 of 11
American Institute of Aeronautics and Astronautics Paper 2002-4133
![Page 3: [American Institute of Aeronautics and Astronautics 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit - Indianapolis, Indiana (07 July 2002 - 10 July 2002)] 38th AIAA/ASME/SAE/ASEE](https://reader042.fdocument.org/reader042/viewer/2022020615/575095251a28abbf6bbf43a1/html5/page/3.jpg)
duct and the engine during off-design operations, thusenabling us to establish general intake design guide-lines.
The paper is organized as follows. First a refer-ence intake geometry will be introduced; then theoptimal performance at on-design conditions of thereference intake will be parametrically analyzed anddiscussed. Next, the approximate, algebraic, modelof the shock pattern developed during the subcriti-cal operation regime will be illustrated. The followingsection will present the results of the validation of thesimplified model, validation which will be carried outby comparing the flow pattern generated by a givenintake shape as predicted by the simple model and byan accurate CFD model. Finally, the off-design predic-tion of the air intake produced by the simplified modelwill be used to estimate the overall fuel mass fractionrequirement of a vehicle flying along a constant dy-namic pressure flight corridor. The main conclusionof this analysis is that the intake geometry, which isoptimal over a flight corridor, differs from that opti-mal at the design point, and the reasons causing thiscircumstance can be clearly identified.
Reference Intake Geometry
The hypersonic flight requirement of a deep inte-gration between the vehicle aerodynamic structuresand its propulsion system rules out high drag axis-symmetric intake configurations in favour of two-dimensional mixed-compression intakes with forebodyprecompression. Most of the recent hypersonic vehicleconcepts, such as the Hyper-X7, 8 demonstrator, adoptthis configuration which involves a shape design withseveral external and internal compression ramps.
The reference intake geometry for our approximatemodel should therefore be able on one hand to re-produce the main flow features of a two-dimensionalmixed-compression intake and on the other hand todisplay an off-design shock pattern involving a limitednumber of shock-shock and shock-wall interactions. Infact, the difficulty in dealing with complex phenom-ena such as multiple shock interactions and reflections5
without invoking CFD analysis tools, will force us toconsider very simple intake configurations only.
For this reason, the subcritical, off-design, shockpattern generated by the interaction between the bow-shock and the external ramp oblique shocks should bekept at a minimum level of complexity thereby rulingout multi-ramp configurations in spite of their higheron-design efficiencies. A single ramp geometry wastherefore chosen to accomplish external compression.5
Similar difficulties arise with multiple internal rampswhen attempting to predict the successive shock re-flections and interactions arising under off-design op-erations. Therefore, the internal compression will beaccomplished by a Prandtl-Meyer single family isen-tropic compression profile in spite of its greater length.
compressione esterna compr. P-M interna
c
M
θ
σD
δ
AA
ramp
th
th
entry
A =
1
D
external compression internal P−M compr.
Fig. 1 Reference intake geometry and definitionof the three design parameters (MD, θD, σth).
Such reference intake geometry can be uniquelyidentified by specifying the following three indepen-dent design parameters (Fig. 1): (i) the intake designMach number MD , (ii) the oblique shock wave an-gle θD at the design Mach number and (iii) the flowdeviation angle σth downstream of the throat.
Note that the intake design Mach number MD islower than the free stream Mach number M∞, sincethe flow is decelerated across the oblique shocks gen-erated by the ramps located along the vehicle forebody.
Clearly, the wedge angle δramp is uniquely identifiedonce the design Mach number and the oblique shockwave angle θD are given.
The on-design capture area A0 is taken equal to theintake duct height Ac. The length of the external com-pression is such that the oblique shock wave hits theintake cowl lip at the design Mach number.
Thus, each pair of values (θD, σth) uniquely identi-fies a geometry within the family of intakes having adesign Mach MD.
By conventionally setting the intake duct height Ac
equal to unity, both the external ramp length LN andthe intake duct entry area Aentry can thus be found:
LN =1
tan θD
Aentry = (1− LN tan δramp) cos δramp
The Prandtl-Meyer compression wave realizing theinternal compression is centered at the intersection ofthe ramp wedge and a line stemming from the cowl lipand with a slope equal to the Mach line angle eval-uated downstream the leading oblique shock. Theintake duct geometry is found by tracing a stream-line starting at the cowl lip through the Prandtl-Meyercompression. At the end of the compression, the in-take cross section area defines the intake throat Ath
where the flow Mach number is minimum Mth and, byconstruction, the flow angle is σth.
The proposed intake configuration provides the sim-plest way to realize a mixed external-internal compres-sion, and as such has little chances to represent a ”realworld” intake. Moreover, no viscous effects will be ac-counted for in predicting the performance delivered,and the performance estimate will be overly optimistic
2 of 11
American Institute of Aeronautics and Astronautics Paper 2002-4133
![Page 4: [American Institute of Aeronautics and Astronautics 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit - Indianapolis, Indiana (07 July 2002 - 10 July 2002)] 38th AIAA/ASME/SAE/ASEE](https://reader042.fdocument.org/reader042/viewer/2022020615/575095251a28abbf6bbf43a1/html5/page/4.jpg)
since no wave losses are associated to the Prandtl-Meyer compression, whereas oblique shocks (at leastone) always participate to the internal compression ina real intake. However, this simplified configurationwill suffice to highlight the main phenomena affectingthe choice and identification of an intake design opti-mal over a range of flight Mach number.
On-Design Performance Analysis
For a given design Mach number MD, the intake ge-ometry design parameters (θD , σth) will be subject togeometrical and gasdynamical constraints, which willdefine the domain of feasible intake geometries. For agiven shock angle θD ∈ (θDmin, θDmax) , with θDmin
equal to the flow Mach angle (a function of MD) andθDmax equal to the detatchment angle (a function ofMD and δramp), the deviation angle σth will lie be-tween two extremes, one corresponding to a limitingisentropic compression yielding sonic throat conditionsand the other corresponding to a zero strength com-pression, so that σth = δramp(MD, θD).
Any point chosen within the feasible domain corre-sponds to a physically admissible air intake geometry.
Appropriate performance indices at on-design op-eration can be computed for such a geometry, thesebeing (i) adiabatic compression efficiency ηc, definedas the ratio of the isentropic enthalpy change over theactual enthalpy change accomplished through the ex-ternal oblique shock and a normal shock at the throat,and (ii) the engine specific impulse Isp, or equivalently,the specific thrust Tsp. The latter index is computedby carrying out a First Law analysis2 of the enginecycle with prescribed combustion and expansion effi-ciencies as illustrated in the Appendix.
At this stage, performance maps of adiabatic com-pression efficiency and specific impulse can be con-structed as a function of θD and σth for a given designMach number MD. Fig. 2 shows one of such maps forthe design Mach number MD = 5.0 intake family.
Within each feasible two-dimensional domain in the(θD , σth) plane, there exists a one-dimensional sub-domain of intake geometries (identified by a dashedline in Fig.2) yielding a selection of configurationswhich are optimal in terms of highest adiabatic effici-cency ηc, that is, for a given value of σth, there existsan optimal value of θD such that the configuration ofthe oblique shock plus the normal throat shock yieldsa minimum total pressure loss. The peak performanceis found at the left side of this one-dimensional sub-domain and suggests that low oblique shock anglesintake geometries defined for the design Mach num-ber MD = 5.0, by θD ≈ 12deg , with a very strongflow turning provided by the Prandtl-Meyer compres-sion σth ≈ −70deg yield the maximum performanceof ηc ≈ 0.99 and Isp ≈ 4600. Clearly, this class ofgeometries is unacceptable because they are too long,the flow turning too extreme and the predicted per-
Flow turning angle
Sho
ckan
gle
-80 -60 -40 -20 0 20 400
10
20
30
40
50
60
70
Adiabatic compression efficiency0.990.9750.960.9450.930.9150.90.8850.870.8550.840.8250.810.7950.78
MD = 5.0
Flow turning angle
Sho
ckan
gle
-80 -60 -40 -20 0 20 400
5
10
15
20
25
30
35
40
45
50
55
60
65
70
Flow turning angle
Sho
ckan
gle
-80 -60 -40 -20 0 20 400
10
20
30
40
50
60
70
Isp46004500440043004200410040003900380037003600350034003300320031003000290028002700260025002400
MD = 5.0
Flow turning angle
Sho
ckan
gle
-80 -60 -40 -20 0 20 400
10
20
30
40
50
60
70
Intake length98.587.576.565.554.543.532.521.51
MD = 5.0
M =5.0
ηC
D
Isp
DM =5.0
θ
σ
σth
th
Dθ
LN
D
Specific impulse map
Adiabatic compression efficiency map
Fig. 2 On-design performance maps for intakeswith design Mach number MD = 5.0
formance over-optimistic, since no viscous effects areaccounted for, and no wave losses are associated to thePrandtl-Meyer compression.
An Approximate Shock Pattern Model
In assessing the conclusions drawn from the inspec-tion of the on-design performance maps, one has toconsider that an optimal on-design geometry will, mostlikely, no longer be optimal under off-design opera-tions, and especially so in the subcritical regime. Fromthis follows the importance of devising a subcriticalshock pattern prediction model capable of comput-ing ’real time’ performance parameters along a givenconstant dynamic pressure trajectory. Such a modelshould require very little CPU time, so that it could beincorporated in an automatic optimization procedure.
The model presented in this work is an extensionof the model originally developed and illustrated bySeddon and Goldsmith (1985).1
Given an intake geometry and flight conditions, themodel assumes that, during sub-critical operations, acurved bowshock stabilizes in front of the entry sec-tion thus prompting spillage of air over the cowl lip at
3 of 11
American Institute of Aeronautics and Astronautics Paper 2002-4133
![Page 5: [American Institute of Aeronautics and Astronautics 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit - Indianapolis, Indiana (07 July 2002 - 10 July 2002)] 38th AIAA/ASME/SAE/ASEE](https://reader042.fdocument.org/reader042/viewer/2022020615/575095251a28abbf6bbf43a1/html5/page/5.jpg)
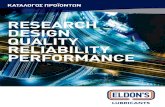
subsonic speed. The shock pattern is further compli-cated because of the ’triple point’ interaction occurringbetween the curved bowshock and the oblique shockemerging from the ramp. An oblique shock imping-ing on the intake ramp, and a contact discontinuityemerge past the triple point interaction (see Fig. 3).
β
β β1
2
S
A0
0M
X
Y
ξ
Riemann
M =1th
hyperbolicshock
sonic line
µ
X0
moutm in
continuity
X0
8β
mass flow
λ
λ
S
B
standoff
. .
S
S
cowl lip
(vertex )
Fig. 3 An algebraic model of the intake subcriticflow pattern.
A different, and somewhat simpler, model is re-quired when spilling is accomplished at supersonicspeed, when the oblique shock stemming from the ex-ternal ramp has a slope angle larger than the valueattained at the design point.
Main Assumptions
With reference to the sketch and the nomenclatureshown in Fig. 3 , the main assumptions of the modelare the following:
1. The curved bowshock is assumed to describe ahyperbolic curve with vertex x0 in a x, y frameof reference, where the x-axis is parallel to thefree-stream direction. The choice of a hyperbolicform is physically justified by the fact that theshock should have zero strenght at infinity, andtherefore one asymptote of the hyperbola will beset parallel to a Mach line of slope µ = arcsin 1
M0
where M0 is the (current) Mach.
2. At the triple point the hyperbola has a localslope β∞ with respect to the horizontal; the slopeβ∞ is found by solving a two-dimensional Rie-mann problem generated by the interaction of thecurved bowshock and the oblique shock stemmingat the base of the external ramp.
3. The flow past the curved bowshock becomes sub-sonic and then reaccelerates to supersonic speedswhen passing over the cowl lip. The sonic line in-tersects the curved bowshock at a point S. Therethe slope of the hyperbola βs equals the oblique
shock detachment angle δmax relative to the cur-rent Mach M0. The local flow angle will thereforebe λS = δmax. This conclusion is justified by theconsideration that point S must act as a dividingpoint between the part of bowshock downstreamof which the flow is subsonic, and supersonic re-spectively. Therefore, the oblique shock is of thestrong type underneath point S and of the weaktype above it. The maximum slope of a weakshock or the minimum slope of a strong shock willtherefore occur where λS = δmax.
4. The sonic line joining the sonic point and thecowl lip is considered to be straight. This as-sumption is somewhat oversimplified but it isnearly impossible to account for the dependenceof the actual sonic line shape3 with the Machnumber and the intake geometry and to keepthe model simple as required. Therefore, assum-ing the sonic line straigth will imply a sistem-atic over/underestimation of the massflow cross-ing through it. This issue will require calibrationof the model against comparison with CFD re-sults.
Solving the flow model problem
Once these assumptions are laid out, it is neces-sary to find a ”solution” for this simplified flow model,which involves finding the correct shock shape andlocation, the capture area, solving the triple point in-teraction, and assessing what type of shock reflectionoccurs at the ramp for the shock emerging out thetriple point interaction, all of this for a given intakegeometry and flight conditions.
A first guess of the capture area A0 is initially setand fed as input to determine the bowshock’s hyper-bola vertex x0 which ultimately defines the bowshock’sstandoff distance and hence the shock pattern. Find-ing x0 involves an iterative procedure (Fig. 4) aimedat enforcing a continuity condition between the mass-flow min passing through the capture area at the up-stream flow conditions, and the massflow mout flowingthrough the sonic line extending between the intakecowl and the bowshock at the sonic flow conditions, asillustrated in the inset of Fig.3. At this point, the pro-cedure must verify if the guessed value of capture areaA0, with the resulting shock pattern, produces sonicconditions at the throat. If this is not so the wholeprocedure is re-iterated until convergence is reachedat which point the shock system found is compatiblewith the intake geometry and flight conditions.
The model here presented extends the originalSeddon-Goldsmith model, by allowing the triple pointto fall both within the capture tube (sketch at the bot-tom of Fig 5) and outside of it (sketch at the top ofFig 5). The first instance is more complicated thanthe latter because the evaluation of the capture areacannot be carried out independently of the bowshock
4 of 11
American Institute of Aeronautics and Astronautics Paper 2002-4133
![Page 6: [American Institute of Aeronautics and Astronautics 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit - Indianapolis, Indiana (07 July 2002 - 10 July 2002)] 38th AIAA/ASME/SAE/ASEE](https://reader042.fdocument.org/reader042/viewer/2022020615/575095251a28abbf6bbf43a1/html5/page/6.jpg)
M0
M=1
Ri
M>1
M0
θσDesign Parameters MM0
D th D
INPUT
GeneratorDesign Geometry
Capture Area
NO
?
OUTPUT
Flight Mach
YES
Triple PointRiemann Solver
No Stationary Solutions
Bowshock Standoff DistanceEstimation
ThroatChoked
YES
YESUpdated
SUPER
?
SONICSpillagePossible
NO
Subsonic Spillage
Supersonic Spillage
Iteration onCapture Area
?
Stop
Fig. 4 Flow chart of the iterative procedure tofind the model solution.
standoff distance estimation as the average pressurelosses for the captured streamtube are functions ofthe standoff distance itself. The capture area rela-tive to the latter case, on the other hand, can bedetermined independently of the triple point, since thecaptured streamtube does not embrace the triple pointand therefore the related pressure losses are solely dueto the oblique ramp shock and the downstream wall-impinging shock.
Allowing for the triple point to fall both outside andinside of the capture streamtube makes it possible tofurther estimate the flight conditions at which it actu-ally crosses the dividing streamline (i.e. the streamlinedividing the captured streamtube and the outer flow).This can be adopted as a criterion to predict the onsetof buzzing oscillations (Ferri’s criterion4).
Generalized Exact Riemann Solver
The Riemann problem arising at the triple point in-volves the interaction of a weak shock (the obliquewedge shock), and a locally strong shock (the curvedsubcritical shock). Such combination of shocks admits,among the emerging waves, a strong outer obliqueshock, so that the flow past it is subsonic and an innerwall-impinging shock. This requires the extension of astandard exact Riemann solver to account for strongshocks. The Riemann solver yielded the results re-ported in Fig.6, where for a given wedge angle δramp
and free-stream Mach M0 the local slopes β∞ of theouter portion of the bowshock and β2 of the inner por-tion (see upper inset of Fig.3) are displayed.
Fig. 5 Model scheme for triple point inside andoutside of capture tube.
1 1.5 2 2.5 3 3.5 4 4.5 5Free−stream Mach number
404550556065707580859095
100105110
Inne
r sh
ock
angl
e δ=5 15 20 25 30 35 40
β2
1 1.5 2 2.5 3 3.5 4 4.5 5Free−stream Mach number
60
65
70
75
80
85
90
95
100
105
110
Out
er s
hock
ang
le
δ=3
5
10
15
2025 30
35 40
β inf
2β
5 15 2520 30 35 40
δ ramp
β 2
M0
3
5
15
2025 30
35 40δramp
β8
10
β 8
Fig. 6 Riemann solver results: (β2, β∞)M0,δramp.
The oblique shock emerging from the triple pointand impinging the ramp can reflect at the wall follow-ing three distinct modalities: (i) regular oblique shockreflection, (ii) a Mach reflection or (iii) no reflectionat all. In this latter case the oblique shock is strongand bends so as to impinge the ramp wall at a right
5 of 11
American Institute of Aeronautics and Astronautics Paper 2002-4133
![Page 7: [American Institute of Aeronautics and Astronautics 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit - Indianapolis, Indiana (07 July 2002 - 10 July 2002)] 38th AIAA/ASME/SAE/ASEE](https://reader042.fdocument.org/reader042/viewer/2022020615/575095251a28abbf6bbf43a1/html5/page/7.jpg)
angle. Fig. 8 displays the domains of existence of thethree reflection modes as a function of the ramp angleδramp. and flight Mach M0.
A CFD validation procedure has confirmed that in-take geometries featuring the Mach reflection modeduring subcritical operation provide very unfavourableflow patterns as illustrated in Fig.7. These are origi-nated by the very strong velocity gradients across thevortex sheet emanating from the triple point which ul-timately generate large recirculation regions within theintake’s convergent duct leading, among other things,to a drastic reduction of the captured mass-flow.
Mach refl.
Fig. 7 Mach contours and streamlines at flightMach 4.0 illustrating recirculation for a MD = 5.0θD = 42deg σth = +10deg intake (close up).
In contrast, intakes displaying no shock reflection atthe ramp wall are preferable as the flowfields they orig-inate are far more uniform and recirculation regions farsmaller.
0 5 10 15 20 25 30 35 40 45 50Ramp angle
1
1.5
2
2.5
3
3.5
4
4.5
5
5.5
6
Cru
ise
Mac
h
Regular reflection
Mach reflection
No regular refl.
δ ΜΑΞδmax
Fig. 8 Parametric maps classifying the type ofshock reflection at the ramp wall as a function ofintake ramp angle (deg) and cruise Mach.
Model Validation
Once the procedure has converged, the proposedmodel problem delivers the following information: thecapture area, all main flow states (assumed piecewiseconstant within each flow portion enclosed by shocksor wall boundaries), shocks’ locations, structures, andstrengths. Derived quantities will include overall static
temperature rise and total pressure drop across the in-take.
Fig. 9 Shock pattern as predicted by the simplemodel and by CFD for a MD = 3.5 θD = 25deg σth =−10deg intake.
Fig. 10 Triple point path as Mach is varied, aspredicted by CFD and by model for a MD = 3.5θD = 25deg σth = −10deg intake.
The model was subject to an extensive validationprocedure through comparison with inviscid CFD re-sults. The CFD solver used is based on a shock-fittingtechnique,14 which allows to sharply measure shock
6 of 11
American Institute of Aeronautics and Astronautics Paper 2002-4133
![Page 8: [American Institute of Aeronautics and Astronautics 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit - Indianapolis, Indiana (07 July 2002 - 10 July 2002)] 38th AIAA/ASME/SAE/ASEE](https://reader042.fdocument.org/reader042/viewer/2022020615/575095251a28abbf6bbf43a1/html5/page/8.jpg)
angles and location so as to improve the accuracyof the comparison. For those intakes which displaya normal incident bowshock in subcritical operation,the comparison campaign has allowed for a thoroughverification of the simplifying assumptions made andfor error estimation. In particular the straight sonicline assumption was extensively investigated and themodel calibrated accordingly.
Fig.9 shows a direct comparison between the CFDgenerated flowfield and the algebraic model for aMD = 3.5 θD = 25deg σth = −10deg intake at flightMach 2. The comparison shows that the triple pointlocation is well captured although the bowshock shapeis somewhat in disagreement as the shock moves intothe farfield.
For the same intake geometry, Fig.10 shows the tra-jectory followed by the triple point as the Mach islowered in sub-critical operation as computed by CFDand by the algebraic model. Note that the curvedascending-descending path of the triple point obtainedthrough CFD can be properly described by the sim-plified algebraic model.
The algebraic model also allows us to predict theMach number (transition Mach) below which air isspilled subsonically and above which supersonically.Fig.11 shows that for a given design Mach and obliqueshock angle, the range of supersonic spillage, definedby the difference between the design Mach and thetransition Mach, decreases for higher absolute val-ues of the flow deviation, i.e. for stronger Prandtl-Meyer internal compressions. This is because forstronger on-design internal compressions the designthroat Mach approaches unity thus leaving less marginbefore chocking conditions arise as the flight Mach islowered.
−40 −30 −20 −10 0 10Flow deviation angle
1
1.5
2
2.5
3
3.5
Tra
nsiti
on M
ach
num
ber
Md=3.5
θ=30
supersonic spillage
θ=25
θ=20subsonic spillage
Fig. 11 Transition Mach as a function of intakedesign parameters
Fig.12 demonstrates the excellent agreement foundfor the capture area A0 and the total pressure recoveryas functions of Mach for an intake geometry with de-sign parameters MD = 3.5 θD = 25deg σth = −10deg.
Off-Design Performance Analysis
The approximate algebraic model proposed will en-able us to carry out an extensive off-design perfor-mance campaign relative to a great number of air
x
y
1 2 3 4 50
0.5
1
1.5
2
2.5
3
3.5
4
x
y
1 2 3 4 5
0.5
1
1.5
2
2.5
3
3.5
4
Mach
A0
2 2.5 3 3.5
0.4
0.5
0.6
0.7
0.8
0.9
1
CFDALGEBRAIC
INTAKE B
x
p0/
p 0∞
3 4 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Frame 001 19 Sep 2000 Valori medi sulla presa d’aria
Mach
Tot
alP
ress
ure
Dro
p
2 2.5 3 3.50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
ALGEBRAICCFD
INTAKE B
Fig. 12 Results of the comparison with CFD data:capture area A0 and total pressure losses as a func-tion of the flight Mach number for an intake geom-etry with design parameters MD = 3.5 θD = 25deg
σth = −10deg..
θD σth
18 from− 50 to− 619 from− 40 to− 520 from− 20 to− 421 from− 11 to− 3
Table 1 Ranges of design parameters (in deg) ex-amined for an intake designed at MD = 3.5.
intake shapes, along given flight path trajectories.We chose to examine intake geometries for the designMach number MD = 3.5, and different combinationsof (θD , σth) as detailed in Table 1.
As a global performance parameter we selected thefuel consumption needed to accelerate a reference ve-hicle from an initial Mach, Mi = 1.6, to a final Mach,Mf equal to the intake geometry design Mach numberMD = 3.5.
The vehicle flies along a constant pitch and con-stant dynamic pressure q0 = 72.5kN/m2 accelerationtrajectory. The vehicle is assumed to have variable,
7 of 11
American Institute of Aeronautics and Astronautics Paper 2002-4133
![Page 9: [American Institute of Aeronautics and Astronautics 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit - Indianapolis, Indiana (07 July 2002 - 10 July 2002)] 38th AIAA/ASME/SAE/ASEE](https://reader042.fdocument.org/reader042/viewer/2022020615/575095251a28abbf6bbf43a1/html5/page/9.jpg)
lumped-mass body subject to weight, thrust F andspillage drag De. The spillage drag is solely due to theintake and can be easily evaluated on the basis of themodel output data as illustrated in the Appendix. Noother drag sources have been accounted for, so as tohighlight the effects of the intake off-design operationson the global performance of the vehicle.
Manipulation of the equation of motion yields a re-lation for the instantaneous vehicle mass:
dm
m= −
d(
V 2
2
)
+ gdr
η0hPR
(
1− De
F
)
(1)
where η0 is the total airbreathing engine efficiency ascalculated through a simple First Law analysis (seeAppendix) of the thermodynamic engine cycle, r isthe radial distance from the center of the Earth, andhPR is the propellant heat of reaction. The numericalintegration of Eq.(1) yields the end-of-mission Fuel toMass Fraction (FMF) index Πf defined as:
Πf =mi −mf
mi
(2)
We will define an intake geometry optimal if it willminimize the final FMF over an accelerating flightpath. Note that Eq.(1) and hence Πf ultimately de-pends upon the following group of terms:
η0
(
1−De
F
)
(3)
which can be identifiable as an effective overall effi-ciency of the engine. It is therefore clear how, every-thing being equal, in order to save fuel it is essential toadopt an intake design that during the mission, and es-pecially during its off-design operation, minimizes thedrag to thrust ratio De/F .
1 1.5 2 2.5 3 3.5 4flight Mach
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Effe
ctiv
e O
vera
ll E
ffici
ency
q=72.5kN/m2 trajectory
SIGMA=−10
−15
−20
−25
θ =20D
EFFICIENCYGLOBALON DESIGN
η 0
σth
θ = 20D
Fig. 13 Effective overall efficiency along trajectoryas a function of Mach for several intake design pa-rameters σth and fixed θD = 20deg.
Fig.13 displays the global overall efficiency relativeto intakes having θD = 20deg and different σth as
reported in Tab.1. A sudden efficiency drop can be no-ticed in correspondence to the transition between thesupersonic and subsonic spillage regimes due to the on-set of the bowshock and the accompanying drastic in-crease in drag. Moreover, an inversion of performanceoccurs between the two regimes. It was concludedthat this behaviour is due to the fact that intakeswith the best performance both at design point andduring supersonic spillage (when spillage drag is neg-ligibly small), simultaneously show the highest De/Fratios during the subsonic spillage regime and hencethe worst performance in such regime.
1 1.5 2 2.5 3 3.5 4flight Mach
0
0.02
0.04
0.06
0.08
0.1
Inst
anta
neou
s F
MF
(w
ith D
rag)
q=72.5kN/m2 trajectory
SIGMA=−25
−20
−15
−10
θ =20D
SIGMA=−20SP. DRAG=0
thσθ = 20D
No Drag{σth
Fig. 14 Instantaneous Fuel Mass Fraction alongtrajectory as a function of Mach for several intakedesign parameters σth and fixed θD = 20deg.
Fig.14 displays the instantaneous FMF, Πf (M), asa function of the increasing flight Mach along the tra-jectory, as it results from the integration of Eq.(1).Fuel consumption is clearly faster during the subsonicspillage regime because of high drag and slower duringsupersonic spillage. Intakes with increasing absolutevalues of flow deviation, |σth|, because of their widersubsonic spillage ranges and higher spillage drag val-ues, will tend to yield higher end-of-mission FMF val-ues, Πf (MD).
−30 −25 −20 −15 −10 −5 0Flow turning angle SIGMA
0.015
0.02
0.025
0.03
0.035
0.04
FIN
AL
Fue
l Mas
s F
ract
ion
Overall performance on a q=72.5kN/m2 trajectory
FMF with DragFMF No Drag
THETA18192021
σth
Dθ
Fig. 15 End-of-mission Fuel Mass Fraction as afunction of intake design parameters.
8 of 11
American Institute of Aeronautics and Astronautics Paper 2002-4133
![Page 10: [American Institute of Aeronautics and Astronautics 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit - Indianapolis, Indiana (07 July 2002 - 10 July 2002)] 38th AIAA/ASME/SAE/ASEE](https://reader042.fdocument.org/reader042/viewer/2022020615/575095251a28abbf6bbf43a1/html5/page/10.jpg)
Fig.15 displays the end-of-mission FMF, Πf (MD).The importance of intake spillage drag appears clearlywhenever it is neglected in the computation of the fi-nal FMF. We observe the emergence of optimal valuesfor σth for given values of θD which minimize the finalFMF. Considering intake geometries with increasingabsolute values of |σth|, from right to left in the figure,we initially observe that an increase in η0 has a ben-eficial effect on FMF (in spite of increasingly widersubsonic spillage ranges) until we reach an optimumbeyond which the deleterious effect of increasingDe/F(and yet wider subsonic spillage ranges) prevails.
This result clearly underlines that optimal, fixed-geometry, intake design geometries exist for missionprofiles involving a continuos acceleration flight pathand such geometries are different from those found op-timal at constant Mach fligth path.
Conclusions
A simplified model for the subcritical behaviour ofa supersonic fixed-geometry, mixed-compression air in-take was presented. The algebraic nature of the modelwas validated against detailed CFD calculations of theflowfield about the intake. For geometries which donot manifest shock reflection at the ramp, and hencehave widely uniform flowfields, the model delivers asatisfactory agreement with CFD data.
The model was successful in pinpointing the mainmechanisms governing the relationships between in-take geometry, subcritical shock patterns and ulti-mately compression efficiency.
Given the low computing power requirements, itwas possible to carry out an extensive off-design en-gine performance analysis so that the parametricalinfluence of intake design parameters could be clearlyhighlighted. Optimal geometries were found for whichfuel consumption is minimal over a given acceleratingtrajectory. In particular it was found that such op-timal geometries arise because intakes delivering thebest performance both at design point and duringsupersonic spillage, simultaneously show the highestdrag/thrust ratios during the subsonic spillage regimeand hence the worst performance in such regime. Acompromise geometry will therefore sacrifice part ofits on-design efficiency in favour of lower drag valuesduring the subsonic spillage regime.
The subsonic spillage, or unstarted, operation isclearly a highly unfavourable flight condition and cer-tainly one to be avoided during cruise and acceleration.To pursue this aim a well established solution is theinternal bleeding of part of the captured air flow whichcauses the bowshock to be swallowed and started con-ditions to be reached. The proposed model can indeedyield a proper estimate of the amount of bleedingrequired. Since its main outcome is a relationshipbetween the bowshock standoff, the captured massflow and throat area at given flight conditions, then
the amount of bleeding is simply found by enforcingthat the standoff distance be zero. Under this limitingcondition, the bowshock, at the inlet duct, becomesunstable, is swallowed and the intake is started. Anal-ysis of the bleeding requirements to achieve supersonicspillage operation along the whole mission profile willbe the subject of a forthcoming research activity.
AppendixFirst Law Analysis
Engine modelling can be kept at a minimum level ofcomplexity through a First Law Analysis which viewsthe propulsion plant as a thermodynamic closed cycle.In so doing, engine global efficiency can be definedas the ratio of thrust power to input thermal power,and can be expressed (see Fig. 16) as the product ofa combustion efficiency ηb, a propulsive efficiency ηp
and the thermodynamic cycle’s efficiency ηtc:
η0.=
FV0
mfhPR
= ηb ηtc ηp (4)
where hPR is the heat of reaction, mf is the fuel massflow and where V0 is the flight velocity.
Fue
l che
mic
al e
nerg
y
Thr
ust w
ork
Ava
ilabl
e w
ork
Ava
ilabl
e he
at
ηη
η
b
tc
p
combustion inefficienciesunburnt fuelpoor mixing
heat lost
lostflux k.e.
Fig. 16 Global engine efficiency
With reference to the nomenclature of Fig.17 suchefficiencies are defined as
ηb =h4 − h3
fhPR
(5)
ηtc =(h4 − h3)− (h10 − h0)
h4 − h3
(6)
ηp =FV0
[(h4 − h3)− (h10 − h0)]m0
'
'FV0
(mf + m0)V10
2
2− m0
V02
2
(7)
where m0 is the captured air mass flow and f =mf/m0 is the fuel to air ratio.
Compression, combustion and expansion submodelscan then be implemented in series, each representing,with its own efficiency, an energy transformation of thecycle. By assigning proper constant values to the com-bustion efficiency and the nozzle adiabatic expansionefficiency ηe, the effects on the global engine efficiencyof the intake’s adiabatic compression efficiency ηc canbe adequately singled out.
9 of 11
American Institute of Aeronautics and Astronautics Paper 2002-4133
![Page 11: [American Institute of Aeronautics and Astronautics 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit - Indianapolis, Indiana (07 July 2002 - 10 July 2002)] 38th AIAA/ASME/SAE/ASEE](https://reader042.fdocument.org/reader042/viewer/2022020615/575095251a28abbf6bbf43a1/html5/page/11.jpg)
With reference to Fig.17, adiabatic compression ef-ficiency is defined as
ηc(ψ, πc).=h3 − hX
h3 − h0
=ψ −
(
1πc
)γ−1
γ
ψ − 1(8)
where ψ.= T3/T0 is the temperature rise and πc
.=
pt3/pt0 the total pressure drop across the intake. Bothψ and πc are directly extracted as output of the intakemodel as a function of flight conditions.
Carrying out the complete cycle analysis, yields arelationship between thermodynamic cycle efficiencyand adiabatic compression efficiency:
ηtc = 1−
{(
ψCpT0
ηbfhPR
+ 1
)
T10
T4
−CpT0
ηbfhPR
}
(9)
where
T10
T4
= 1− ηe
{
1−
[
1− ηc
(
1−1
ψ
)]}
(10)
with ηe.= (h4 − h10)/(h4 − hY ) being the adiabatic
expansion efficiency.
����������
0
3
4
10
Heat addition
Com
pres
sion
Expansion
const. pressure
Heat rejection
const. pressure
Y
X
S
T
Q
Q
IN
OUT
η
η
η
c
b
e
Q IN
Q IN
ηtc= OUTQ_
Fig. 17 Thermodynamic cycle nomenclature
Once the engine global efficiency is computed,the unistalled thrust can be computed as F =η0mfhPR/V0 and specific impulse as Isp
.=
F/(mfg0) = η0hPR/(g0V0).
Spillage Drag
A common definition of intake drag, consistent withthe definition of uninstalled thrust, generally includesa cowl drag and a pre-entry drag contribution. Theformer includes viscous and suction effects on the cowlwhile the latter accounts for the resulting pressureforces on the captured streamtube. Spillage drag, onthe other hand, is defined as the drag increase as thecapture area is lowered below full-flow conditions. Forsupersonic intakes in subcritical operation, neglectingcowl suction (thin wall assumption) and viscous ef-fects, spillage drag can be assumed equal to pre-entrydrag. An expression for supersonic subcritical spillagedrag can be derived by extending the Fraenkel1 (1950)expression valid for a Pitot intake to single-wedge in-take.
For the supersonic spillage case (see Fig. 18.1) thefollowing expression was used:
De = (p1 − p0) (Ac −A0) (11)
aabb
ww
cc
pw2pw2
p1p1
A0A0A1A1 AcAc
pw3pw3
A0A0AcAc
(a)(a)
(b)(b)
cc
A0A0AcAc
p1p1
2)1)
Fig. 18 Spillage Drag
where A0 is the capture area, Ac the intake entry area,p0 and p1 the pre- and post-shock static pressures.
For the subsonic spillage regime, the case in whichthe dividing streamline is below the triple point (seeFig. 18.2a) yields the following expression:
De = (p1 − p0) (Ac −A0) +
+ (pw2 − p0) (Ac −A1) (12)
whereas the case in which the dividing streamline isabove the triple point (Fig. 18.2b) yields
De = (pw3 − p0) (Ac −A0) . (13)
References1 Seddon, J., Goldsmith, E. L., ”Intake Aerodynamics”,
Collins Professional and Technical Books, 1985.2 Heiser, W., Pratt, T., ”Hypersonic Airbreathing
Propulsion”, AIAA Education Series, 1994.3 Rusanov, V. V., Lyubimov, A. N., ”Gas Flows Past
Blunt Bodies”, Nauka Press, Moscow 1970, NASAWashington D.C. Feb. 1973.
4 Ferri, A., ”Elements of Aerodynamics of SupersonicFlows”, Mac Millan N.Y., 1949.
5 Valorani, M., Nasuti, F., Onofri, M., Buongiorno, C.,”Optimal shape design of air intakes for Air CollectionEngines (ACE)”, Acta Astronautical Journal, Vol. 45,No. 12, pp. 729–745, 1999.
6 Czysz P., Bruno C., Kanerori K., ”Interaction ofthe Propulsion System and System Parameters De-termines the Design Space Available for Solution”.Copyright 2001 by Paul A. Czysz, Published by theAmerican Institute of Aeronautics and Astronautics,Inc. with permission. Released to the AIAA to publishin all forms.
7 Freeman, D., Reubush, D., McClinton, C., Rausch,V., Crawford, J. L., ”The NASA Hyper-X Program”,NASA TR 1997.
8 Huebner, L. D., Rock, K. E., Witte, D. W., Ruf,E. G., ”Hyper-X Engine Testing in the NASA Lan-gley 8-Foot High Temperature Tunnel”, AIAA 2000-3605, 36th AIAA/ASME/SAE/ASEE Joint Propul-sion Conference, July 17-19 2000, Huntsville AL.
10 of 11
American Institute of Aeronautics and Astronautics Paper 2002-4133
![Page 12: [American Institute of Aeronautics and Astronautics 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit - Indianapolis, Indiana (07 July 2002 - 10 July 2002)] 38th AIAA/ASME/SAE/ASEE](https://reader042.fdocument.org/reader042/viewer/2022020615/575095251a28abbf6bbf43a1/html5/page/12.jpg)
9 Valorani, M., Di Giacinto, M., Buongiorno, C., ”AMethod to Predict the Performance of Oblique Det-onation Wave Engines (ODWE)”, AIAA 98-S.5.09,49th International Astronautical Congress, Sept 28-Oct 2, 1998, Melbourne Australia.
10 Ikawa, I., ”Rapid Methodology for Design andPerformance Prediction of Integrated SCRAM-JET/Hypersonic Vehicle”, AIAA-89-2682,AIAA/ASME/SAE/ASEE 25th Joint PropulsionConference, Monterey CA, July 10-12 1989.
11 Shneider, A., Koshel W., ”Detailed Analysis of aMixed Compression Hypersonic Intake”, ISABE Pa-per No. 99-7036, 14th International Symposium onAir Breathing Engines, Florence, Italy Sept. 5-101999.
12 Soares, C., Rasmussen M., ”Integration of Scram-jets with Waverider Configurations”, AIAA 89-2675, AIAA/ASME/SAE/ASEE 25th Joint Propul-sion Conference, Monterey CA July 10-12 1989.
13 VonEggers, Rudd L., Rankins, F., Pines D. J., ”Move-able Cowl Control for Increased Hypersonic Per-formance”, AIAA 98-1575, AIAA 8th InternationalSpace Planes and Hypersonics and Tecnologies Con-ference, April 27-30 1998, Norfolk VA.
14 Nasuti, F., Onofri, M., ”Analysis of Unsteady Super-sonic Viscous Flows by a Shock-Fitting Technique”,AIAA Journal Vol. 34 July 1996.
11 of 11
American Institute of Aeronautics and Astronautics Paper 2002-4133