'Aerodinâmica em Regime Transônico e Supersônico'breno.freeshell.org/Aer_ts.pdf · em que a é a...
25
Breno Moura Castro Aerodinâmica em Regime Transônico e Supersônico S ÃO J OSÉ DOS C AMPOS - 2009
Transcript of 'Aerodinâmica em Regime Transônico e Supersônico'breno.freeshell.org/Aer_ts.pdf · em que a é a...
Breno Moura Castro
Aerodinâmica em Regime Transônico eSupersônico
SÃO JOSÉ DOSCAMPOS - 2009

2
Sumário
1 Introdução 51.1 Objetivos gerais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51.2 Objetivos específicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51.3 Ementa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.4 Conteúdo programático . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5
2 Noções básicas 72.1 Número de Mach . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .72.2 Classificação dos escoamentos segundo o Número de Mach . . . . . . . . . . . . . .102.3 Equações fundamentais do escoamento . . . . . . . . . . . . . . . . . . . . . . . . .102.4 Aproximações das equações governantes . . . . . . . . . . . . . . . . . . . . . . . .11
2.4.1 Escoamentos incompressíveis . . . . . . . . . . . . . . . . . . . . . . . . .112.4.2 Pequenas perturbações . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12
2.5 Coeficiente de Pressão . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15
3 Regras de similaridade para escoamentos compressíveis 173.1 Escoamentos subsônicos compressíveis . . . . . . . . . . . . . . . . . . . . . . . .173.2 Escoamentos supersônicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .193.3 Escoamentos transônicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21
3

4 SUMÁRIO
Capítulo 1
Introdução
Este texto tem a finalidade de auxiliar o aluno da disciplina Aerodinâmica em Regime Transônicoe Supersônico, na modalidade de ensino presencial, a passar pelo processo de aprendizagem do ma-terial proposto.
1.1 Objetivos gerais
Familiarização e conhecimento das equações fundamentais do escoamento compressível não-viscoso, regras de semelhança para escoamentos subsônicos e supersônicos, teoria do perfil, teoriada asa finita, interações asa-fuselagem e arrasto transônico.
1.2 Objetivos específicos
Apresentar os fundamentos e princípios básicos da aerodinâmica. Desenvolver os métodos decálculo aerodinâmico de perfis, asas e fuselagens nos regimes transônico e supersônico. Executarsimulações com apoio computacional.
1.3 Ementa
Equações fundamentais do escoamento compressível não-viscoso. Equações de Prandtl-Glauert eAckeret e regras de semelhança para escoamentos subsônicos e supersônicos. Equações simplificadase regras de semelhança para o escoamento transônico. Condições através de choques. Teoria doperfil em regime transônico: descrição física e princípio do cálculo. Teoria da asa finita no regimetransônico; efeito da espessura. Asa finita em regime supersônico: escoamento cônico, método desingularidades. Corpos esbeltos. Interações asa-fuselagem. Arrasto transônico.
1.4 Conteúdo programático
Extensão da aerodinâmica aplicada ao regime transônico e supersônico. Equações fundamentaisdo escoamento compressível não-viscoso. Equações de Prandtl-Glauert e Ackeret e regras de seme-lhança para escoamentos subsônicos e supersônicos. Equações simplificadas e regras de semelhançapara o escoamento transônico. Condições através de choques. Aproximações de Kármán-Tsien e deBusemann. Teoria do perfil em regime transônico: descrição física e princípio do cálculo. Teoria daasa finita no regime transônico; efeito da espessura. Asa finita no regime supersônico: escoamentocônico, método de singularidades. Corpos esbeltos. Interações asa-fuselagem. Arrasto transônico.
5

6 CAPÍTULO 1. INTRODUÇÃO
Capítulo 2
Noções básicas
Este capítulo trata de alguns dos principais conceitos relacionados à Aerodinâmica. Dentre elesdestacam-se a definição do Número de Mach, parâmetro importante para a compartimentalização doestudo desta disciplina, e das principais equações para o estudo de escoamentos não-viscosos.
2.1 Número de Mach
O som é uma onda mecânica que se propaga num gás, líquido ou sólido. A velocidade com queesta onda se propaga depende de características elásticas e inerciais do meio. No ar, esta velocidadedepende fundamentalmente da temperatura do fluido, de acordo com a Eq. (2.1).
a =√
γRT (2.1)
em quea é a velocidade do som,γ é a razão de calores específicos do ar (γ = 1, 4), R é a constantedos gases para o ar (R = 287 J/kg.K) eT é a temperatura absoluta do ar.
A Tabela 2.1 fornece a velocidade do som em alguns meios gasosos, líquidos e sólidos.O som se propaga como uma onda, ou seja, está sujeito a reflexões em obstáculos, interferências
construtivas e destrutivas, atenuações e ao Efeito Doppler. Outra propriedade importante é que asperturbações geradas em um escoamento de ar sobre um corpo propagam-se sempre em todas asdireções e com a velocidade do som naquele meio.
Associada à velocidade do som, utiliza-se a definição de um número adimensional conhecidocomo Número de Mach. Este é um dos parâmetros mais relevantes no estudo da Aerodinâmica e umdos principais em Aeronáutica. A definição de Número de Mach é feita de acordo com a Eq. (2.2).
M =V
a(2.2)
na qualM corresponde ao Número de Mach,V representa a velocidade do escoamento ea é avelocidade do som.
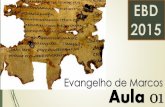
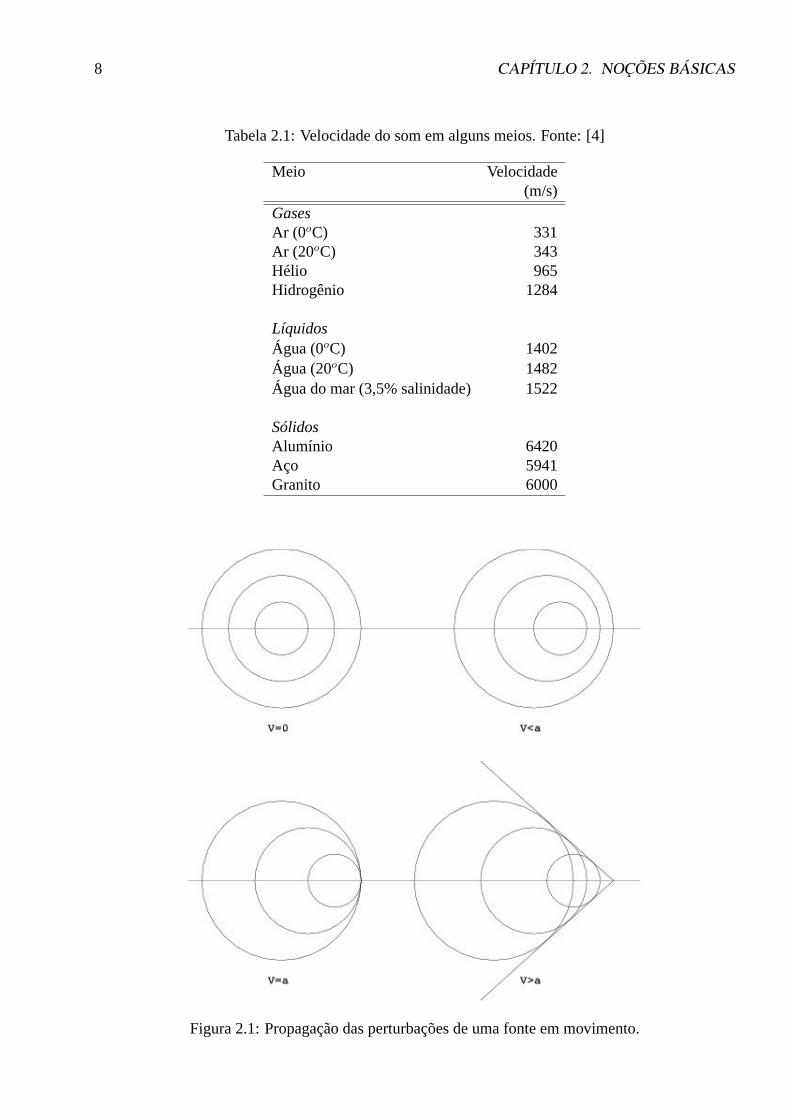
As características do escoamento dependem da velocidade com que uma fonte de perturbaçõesviaja através do fluido. A Figura 2.1 apresenta um esquema ilustrando o comportamento das pertur-bações para alguns regimes de velocidade da fonte.
Perturbações viajam em um fluido com a velocidade do som nesse meio. Considere uma fontede perturbações, de ondas de pressão por exemplo, deslocando-se sobre uma linha horizontal, deacordo com o esquema apresentado na Fig. 2.1. Considere, ainda, que uma perturbação gerada emum determinado instantet = t1 propaga-se em todas as direções. Ou seja, a influência de umaperturbação gerada no instantet = t1 encontra-se na superfície de uma esfera de raioR = a ∆t noinstantet = t1 + ∆t, com centro na posição ocupada pela fonte no instantet = t1.
7
8 CAPÍTULO 2. NOÇÕES BÁSICAS
Tabela 2.1: Velocidade do som em alguns meios. Fonte: [4]
Meio Velocidade(m/s)
GasesAr (0oC) 331Ar (20oC) 343Hélio 965Hidrogênio 1284
LíquidosÁgua (0oC) 1402Água (20oC) 1482Água do mar (3,5% salinidade) 1522
SólidosAlumínio 6420Aço 5941Granito 6000
Figura 2.1: Propagação das perturbações de uma fonte em movimento.
2.1. NÚMERO DE MACH 9
r -V ∆t
��
��
��
��
��7
a ∆t
ZZ
ZZ
ZZ
ZZ
ZZ
ZZ
ZZ
ZZ
ZZ
ZZr -
xµ
A B
C
Superfície do Cone de Mach
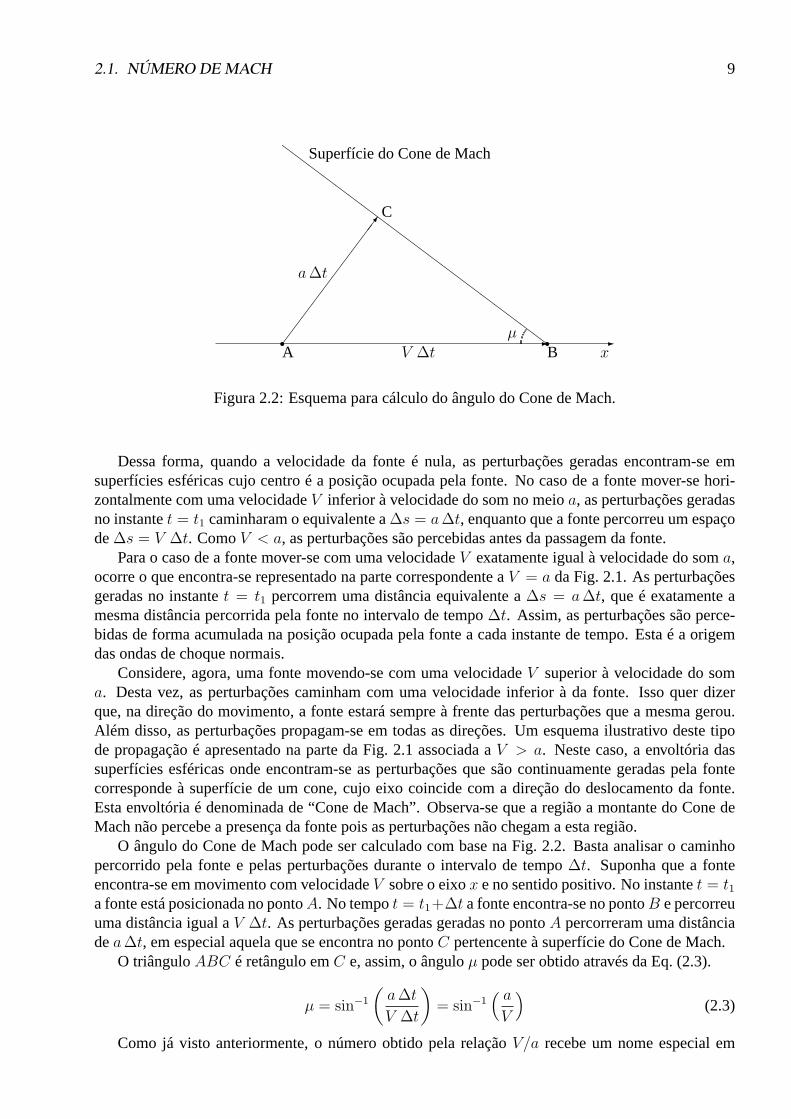
Figura 2.2: Esquema para cálculo do ângulo do Cone de Mach.
Dessa forma, quando a velocidade da fonte é nula, as perturbações geradas encontram-se emsuperfícies esféricas cujo centro é a posição ocupada pela fonte. No caso de a fonte mover-se hori-zontalmente com uma velocidadeV inferior à velocidade do som no meioa, as perturbações geradasno instantet = t1 caminharam o equivalente a∆s = a ∆t, enquanto que a fonte percorreu um espaçode∆s = V ∆t. ComoV < a, as perturbações são percebidas antes da passagem da fonte.
Para o caso de a fonte mover-se com uma velocidadeV exatamente igual à velocidade do soma,ocorre o que encontra-se representado na parte correspondente aV = a da Fig. 2.1. As perturbaçõesgeradas no instantet = t1 percorrem uma distância equivalente a∆s = a ∆t, que é exatamente amesma distância percorrida pela fonte no intervalo de tempo∆t. Assim, as perturbações são perce-bidas de forma acumulada na posição ocupada pela fonte a cada instante de tempo. Esta é a origemdas ondas de choque normais.
Considere, agora, uma fonte movendo-se com uma velocidadeV superior à velocidade do soma. Desta vez, as perturbações caminham com uma velocidade inferior à da fonte. Isso quer dizerque, na direção do movimento, a fonte estará sempre à frente das perturbações que a mesma gerou.Além disso, as perturbações propagam-se em todas as direções. Um esquema ilustrativo deste tipode propagação é apresentado na parte da Fig. 2.1 associada aV > a. Neste caso, a envoltória dassuperfícies esféricas onde encontram-se as perturbações que são continuamente geradas pela fontecorresponde à superfície de um cone, cujo eixo coincide com a direção do deslocamento da fonte.Esta envoltória é denominada de “Cone de Mach”. Observa-se que a região a montante do Cone deMach não percebe a presença da fonte pois as perturbações não chegam a esta região.
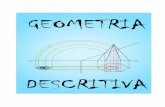
O ângulo do Cone de Mach pode ser calculado com base na Fig. 2.2. Basta analisar o caminhopercorrido pela fonte e pelas perturbações durante o intervalo de tempo∆t. Suponha que a fonteencontra-se em movimento com velocidadeV sobre o eixox e no sentido positivo. No instantet = t1a fonte está posicionada no pontoA. No tempot = t1+∆t a fonte encontra-se no pontoB e percorreuuma distância igual aV ∆t. As perturbações geradas geradas no pontoA percorreram uma distânciadea ∆t, em especial aquela que se encontra no pontoC pertencente à superfície do Cone de Mach.
O triânguloABC é retângulo emC e, assim, o ânguloµ pode ser obtido através da Eq. (2.3).
µ = sin−1
(a ∆t
V ∆t
)= sin−1
( a
V
)(2.3)
Como já visto anteriormente, o número obtido pela relaçãoV/a recebe um nome especial em
10 CAPÍTULO 2. NOÇÕES BÁSICAS
homenagem a Ernest Mach. Desta forma, a Eq. (2.3) pode ser reescrita como apresentado na Eq. (2.4).
µ = sin−1
(1
M
)(2.4)
2.2 Classificação dos escoamentos segundo o Número de Mach
Os escoamentos de ar em torno de um corpo podem ser classificados segundo a velocidade. Noentanto, deve-se levar em consideração que essa velocidade não é a mesma em todos os pontos doescoamento. A presença do corpo altera a direção e a intensidade da velocidade de algumas partículasdo fluido, fazendo com que ocorra uma variação quanto à velocidade das partículas que ainda estãodistantes do corpo.
Assim, para a classificação dos tipos de escoamento, toma-se por base a velocidade dita do escoa-mento não-perturbado, ou seja, a velocidade das partículas que estão longe o suficiente da influênciado corpo sobre o escoamento. Esta velocidade é referenciada comoV∞.
O Número de Mach do escoamento não-perturbado é definido tomando-se como referência avelocidade do som na região afastada do corpo. A Eq. (2.5) traduz matematicamente este parâmetro.
M∞ =V∞a∞
(2.5)
Os regimes de vôo podem ser classificados de acordo com o Número de Mach associado aoescoamento não-perturbado,M∞. A divisão mais comum é apresentada a seguir, juntamente comalgumas das características mais importantes de cada regime.
• Subsônico:0 ≤ M∞ ≤ 0, 8 - ausência de ondas de choque; as perturbações geradas pelapresença do corpo são percebidas em todas as direções.
• Transônico:0, 8 ≤ M∞ ≤ 1, 2 - início da formação de ondas de choque; apresenta regiões emque o escoamento é subsônico e outras onde as velocidades são supersônicas.
• Supersônico:1, 2 ≤ M∞ ≤ 5, 0 - presença de ondas de choque oblíquas; as perturbaçõesgeradas em um ponto somente são percebidas a jusante desse ponto.
• Hipersônico:M∞ ≥ 5, 0 - ondas de choque oblíquas muito próximas à superfície do corpo;surgimento de dissociações das moléculas que constituem o fluido; transferência de calor in-tensa e presença de íons na região da onda de choque.
O Número de Mach do escoamento não-perturbado para o qual surge o primeiro ponto de veloci-dade local do escoamento igual a um (velocidade local sônica) recebe o nome deMach Crítico. Estenúmero de Mach depende da forma do corpo; em especial, depende da espessura do corpo medida nadireção perpendicular à do escoamento não-perturbado.
2.3 Equações fundamentais do escoamento
As equações fundamentais de aerodinâmica de um fluido não-viscoso, na notação de Einstein,são:
1. a equação da continuidade (conservação da massa):
∂ρ
∂t+
∂(ρuj)
∂xj
= 0 (2.6)
2.4. APROXIMAÇÕES DAS EQUAÇÕES GOVERNANTES 11
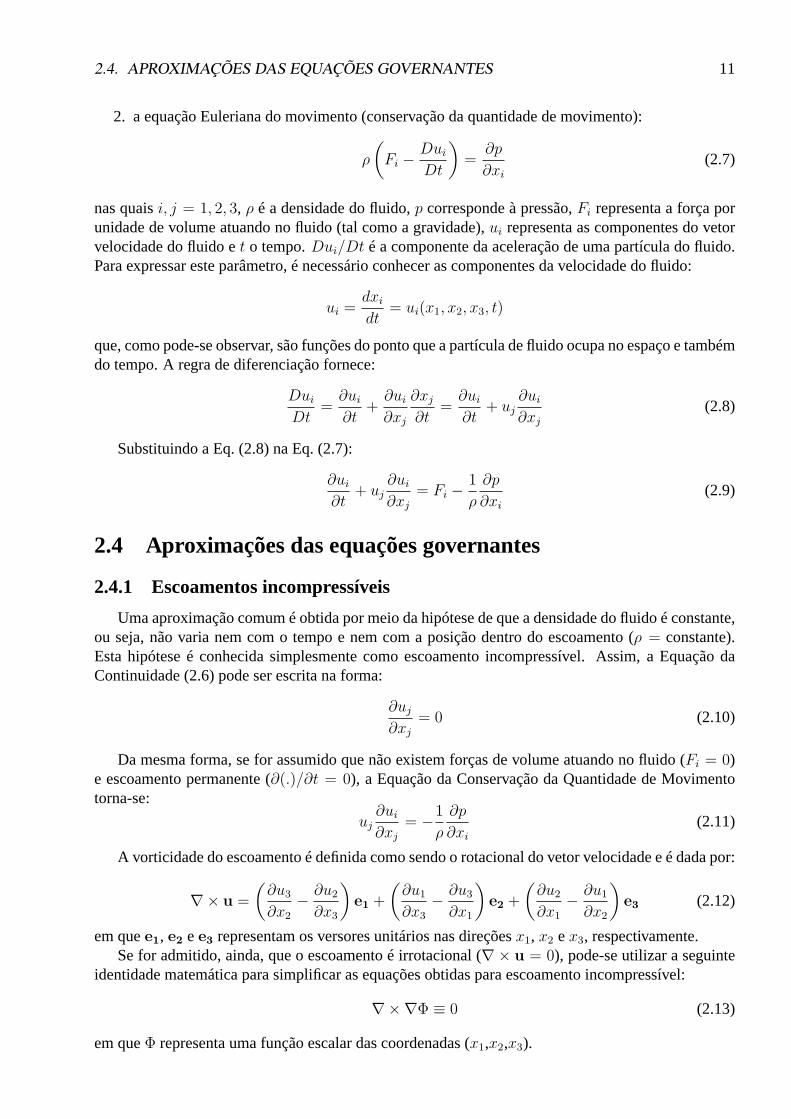
2. a equação Euleriana do movimento (conservação da quantidade de movimento):
ρ
(Fi −
Dui
Dt
)=
∂p
∂xi
(2.7)
nas quaisi, j = 1, 2, 3, ρ é a densidade do fluido,p corresponde à pressão,Fi representa a força porunidade de volume atuando no fluido (tal como a gravidade),ui representa as componentes do vetorvelocidade do fluido et o tempo.Dui/Dt é a componente da aceleração de uma partícula do fluido.Para expressar este parâmetro, é necessário conhecer as componentes da velocidade do fluido:
ui =dxi
dt= ui(x1, x2, x3, t)
que, como pode-se observar, são funções do ponto que a partícula de fluido ocupa no espaço e tambémdo tempo. A regra de diferenciação fornece:
Dui
Dt=
∂ui
∂t+
∂ui
∂xj
∂xj
∂t=
∂ui
∂t+ uj
∂ui
∂xj
(2.8)
Substituindo a Eq. (2.8) na Eq. (2.7):
∂ui
∂t+ uj
∂ui
∂xj
= Fi −1
ρ
∂p
∂xi
(2.9)
2.4 Aproximações das equações governantes
2.4.1 Escoamentos incompressíveis
Uma aproximação comum é obtida por meio da hipótese de que a densidade do fluido é constante,ou seja, não varia nem com o tempo e nem com a posição dentro do escoamento (ρ = constante).Esta hipótese é conhecida simplesmente como escoamento incompressível. Assim, a Equação daContinuidade (2.6) pode ser escrita na forma:
∂uj
∂xj
= 0 (2.10)
Da mesma forma, se for assumido que não existem forças de volume atuando no fluido (Fi = 0)e escoamento permanente (∂(.)/∂t = 0), a Equação da Conservação da Quantidade de Movimentotorna-se:
uj∂ui
∂xj
= −1
ρ
∂p
∂xi
(2.11)
A vorticidade do escoamento é definida como sendo o rotacional do vetor velocidade e é dada por:
∇× u =
(∂u3
∂x2
− ∂u2
∂x3
)e1 +
(∂u1
∂x3
− ∂u3
∂x1
)e2 +
(∂u2
∂x1
− ∂u1
∂x2
)e3 (2.12)
em quee1, e2 ee3 representam os versores unitários nas direçõesx1, x2 ex3, respectivamente.Se for admitido, ainda, que o escoamento é irrotacional (∇× u = 0), pode-se utilizar a seguinte
identidade matemática para simplificar as equações obtidas para escoamento incompressível:
∇×∇Φ ≡ 0 (2.13)
em queΦ representa uma função escalar das coordenadas (x1,x2,x3).

12 CAPÍTULO 2. NOÇÕES BÁSICAS
Por inspeção, observa-se que, para escoamentos irrotacionais, o vetor velocidadeu pode ser es-crito como:
u = ∇Φ =∂Φ
∂x1
e1 +∂Φ
∂x2
e2 +∂Φ
∂x3
e3 (2.14)
Também por inspeção, pode-se constatar que as componentes do vetor velocidadeu são dadaspor:
uj =∂Φ
∂xj
(2.15)
Substituindo a Eq. (2.15) em (2.10) obtém-se a Equação de Laplace:
∇2Φ = 0 ou∂2Φ
∂x21
+∂2Φ
∂x22
+∂2Φ
∂x23
= 0 (2.16)
Lembra-se que a Eq. (2.16) é válida somente quando:
1. o fluido é não-viscoso;
2. o escoamento é incompressível (ρ = constante); e
3. o escoamento é irrotacional (∇× u = 0).
Por sua vez, a Equação da Conservação da Quantidade de Movimento, dentro das hipóteses deescoamento permanente, incompressível e sem forças de volume para um fluido não-viscoso, podeser reduzida à seguinte equação, conhecida como Equação de Bernoulli:
p +1
2ρV 2 = constante (2.17)
na qualp é a pressão,ρ a densidade eV representa o módulo do vetor velocidadeu. Cabe salientarque a Eq. (2.17) é válida somente ao longo de uma linha de corrente do escoamento. No entanto, se oescoamento for irrotacional, a Eq. (2.17) é válida em todo o domínio.
V =√
u21 + u2
2 + u23
Sintetizando, a Equação de Bernoulli é válida em todo o escoamento nas seguites condições:
1. o fluido é não-viscoso;
2. o escoamento é incompressível (ρ = constante);
3. o escoamento é permanente (∂(.)/∂t = 0);
4. não existem forças de volume (Fi = 0); e
5. o escoamento é irrotacional (∇× u = 0).
2.4.2 Pequenas perturbações
A hipótese de pequenas perturbações consiste de:
1. o escoamento é irrotacional (∇× u = 0);
2. o escoamento não-perturbado encontra-se na direçãox1; e
2.4. APROXIMAÇÕES DAS EQUAÇÕES GOVERNANTES 13
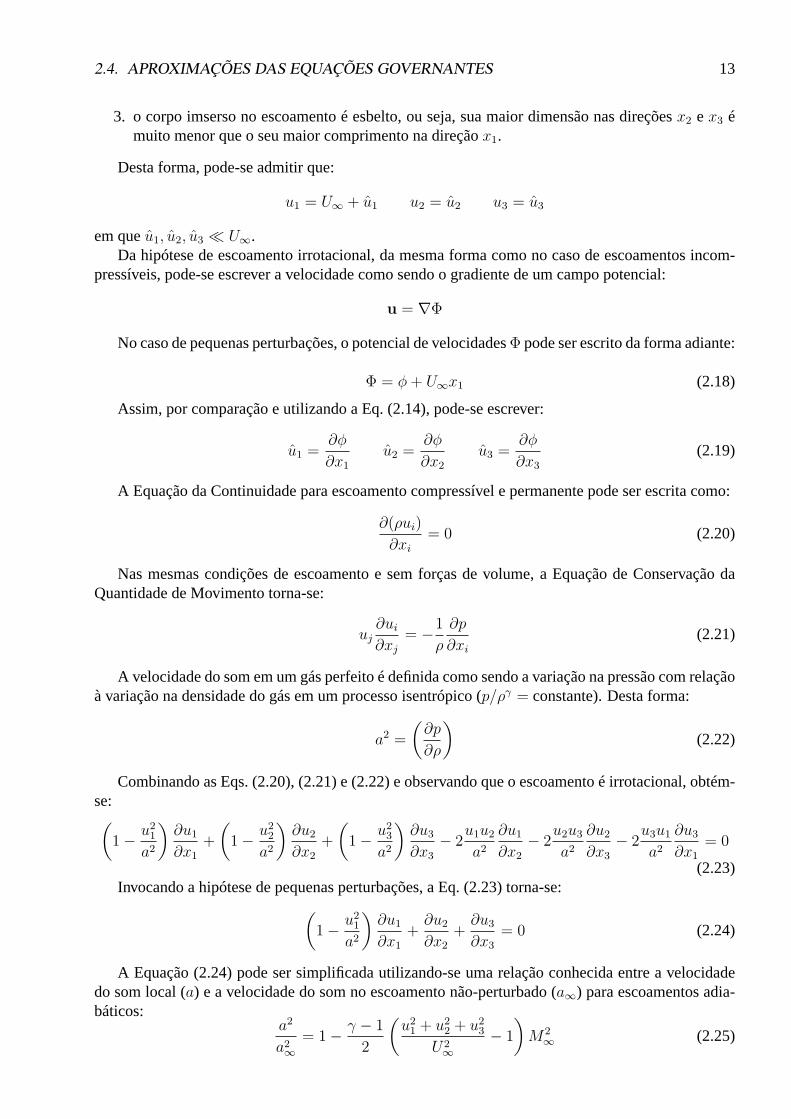
3. o corpo imserso no escoamento é esbelto, ou seja, sua maior dimensão nas direçõesx2 e x3 émuito menor que o seu maior comprimento na direçãox1.
Desta forma, pode-se admitir que:
u1 = U∞ + u1 u2 = u2 u3 = u3
em queu1, u2, u3 � U∞.Da hipótese de escoamento irrotacional, da mesma forma como no caso de escoamentos incom-
pressíveis, pode-se escrever a velocidade como sendo o gradiente de um campo potencial:
u = ∇Φ
No caso de pequenas perturbações, o potencial de velocidadesΦ pode ser escrito da forma adiante:
Φ = φ + U∞x1 (2.18)
Assim, por comparação e utilizando a Eq. (2.14), pode-se escrever:
u1 =∂φ
∂x1
u2 =∂φ
∂x2
u3 =∂φ
∂x3
(2.19)
A Equação da Continuidade para escoamento compressível e permanente pode ser escrita como:
∂(ρui)
∂xi
= 0 (2.20)
Nas mesmas condições de escoamento e sem forças de volume, a Equação de Conservação daQuantidade de Movimento torna-se:
uj∂ui
∂xj
= −1
ρ
∂p
∂xi
(2.21)
A velocidade do som em um gás perfeito é definida como sendo a variação na pressão com relaçãoà variação na densidade do gás em um processo isentrópico (p/ργ = constante). Desta forma:
a2 =
(∂p
∂ρ
)(2.22)
Combinando as Eqs. (2.20), (2.21) e (2.22) e observando que o escoamento é irrotacional, obtém-se:(
1− u21
a2
)∂u1
∂x1
+
(1− u2
2
a2
)∂u2
∂x2
+
(1− u2
3
a2
)∂u3
∂x3
− 2u1u2
a2
∂u1
∂x2
− 2u2u3
a2
∂u2
∂x3
− 2u3u1
a2
∂u3
∂x1
= 0
(2.23)Invocando a hipótese de pequenas perturbações, a Eq. (2.23) torna-se:(
1− u21
a2
)∂u1
∂x1
+∂u2
∂x2
+∂u3
∂x3
= 0 (2.24)
A Equação (2.24) pode ser simplificada utilizando-se uma relação conhecida entre a velocidadedo som local (a) e a velocidade do som no escoamento não-perturbado (a∞) para escoamentos adia-báticos:
a2
a2∞
= 1− γ − 1
2
(u2
1 + u22 + u2
3
U2∞
− 1
)M2∞ (2.25)

14 CAPÍTULO 2. NOÇÕES BÁSICAS
Ainda dentro do contexto de pequenas perturbações, pode-se utilizar o Teorema do Binômio paragerar a seguinte aproximação:
a2∞
a2= 1 +
γ − 1
2M2∞
(2
u1
U∞+
u21 + u2
2 + u23
U2∞
)(2.26)
Para fazer simplificações adicionais na Eq. (2.24), é necessário escrever:
1− u21
a2= 1− (U∞ + u1)
2
a2
u1
U∞
U2∞
U2∞
a2∞
a2∞
= 1− (U2∞ + 2u1U∞ + u2
1)
U2∞
M2∞
a2∞
a2(2.27)
Substituindo Eq. (2.26) em (2.27) e abandonando termos de ordem superior:
1− u21
a2≈ 1−M2
∞
[1 +
2u1
U∞
(1 +
γ − 1
2M2∞
)](2.28)
Assim, a Eq. (2.24) pode ser reescrita como:
(1−M2∞)
∂u1
∂x1
+∂u2
∂x2
+∂u3
∂x3
= M2∞
(1 +
γ − 1
2M2∞
)2u1
U∞
∂u1
∂x1
(2.29)
Utilizando as componentes do vetor velocidade dentro da hipótese de pequenas perturbações:
(1−M2∞)
∂u1
∂x1
+∂u2
∂x2
+∂u3
∂x3
=2
U∞
(1 +
γ − 1
2M2∞
)M2∞u1
∂u1
∂x1
(2.30)
A Equação (2.30) representa a Equação de Pequenas Perturbações.Existem casos, excetuando-se os escoamentos na faixa do transônico, que a Eq. (2.30) pode ser
linearizada, ou seja, os termos à direita da equação podem ser negligenciados. Assim, obtém-se aEquação de Pequenas Perturbações Linearizada:
(1−M2∞)
∂u1
∂x1
+∂u2
∂x2
+∂u3
∂x3
= 0 (2.31)
Para escoamentos isentrópicos e, portanto, irrotacionais, pode-se introduzir a função potencialφ,nos moldes da definição apresentada na Eq. (2.19), e a Eq. (2.31) torna-se a Equação do PotencialLinearizada:
(1−M2∞)
∂2φ
∂x21
+∂2φ
∂x22
+∂2φ
∂x23
= 0 (2.32)
Para escoamentos transônicos deve-se reter os termos à direita da Eq. (2.30). Utilizando, tam-bém, o potencialφ para escoamentos irrotacionais, essa equação torna-se a Equação do PotencialTransônica:
(1−M2∞)
∂2φ
∂x21
+∂2φ
∂x22
+∂2φ
∂x23
=2
U∞
(1 +
γ − 1
2M2∞
)M2∞
∂φ
∂x1
∂2φ
∂x21
(2.33)
Novamente, é importante reforçar as condições em que as Equações do Potencial Linearizada eTransônica são válidas:
1. o fluido é um gás perfeito e não-viscoso;
2. o escoamento é isentrópico (p/ργ = constante);
3. o escoamento é permanente (∂(.)/∂t = 0);
4. não existem forças de volume (Fi = 0);
5. o escoamento é irrotacional (∇× u = 0); e
6. pequenas perturbações (u1, u2, u3 � U∞).
2.5. COEFICIENTE DE PRESSÃO 15
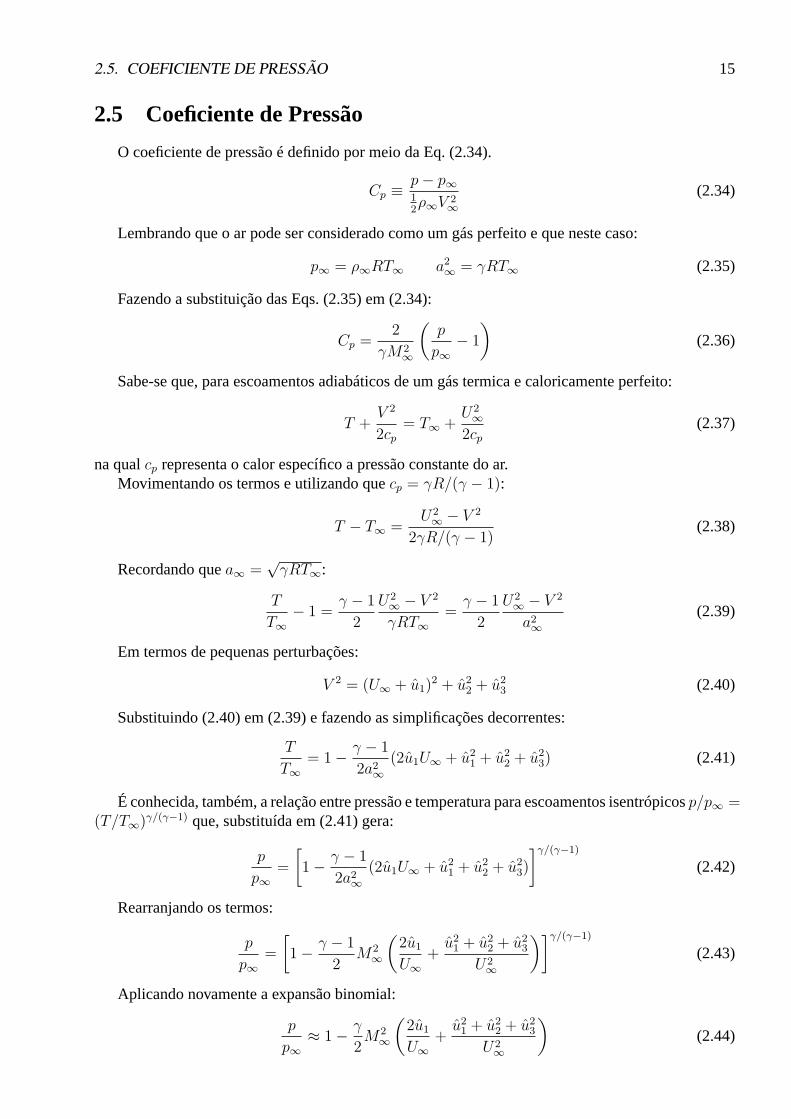
2.5 Coeficiente de Pressão
O coeficiente de pressão é definido por meio da Eq. (2.34).
Cp ≡p− p∞12ρ∞V 2
∞(2.34)
Lembrando que o ar pode ser considerado como um gás perfeito e que neste caso:
p∞ = ρ∞RT∞ a2∞ = γRT∞ (2.35)
Fazendo a substituição das Eqs. (2.35) em (2.34):
Cp =2
γM2∞
(p
p∞− 1
)(2.36)
Sabe-se que, para escoamentos adiabáticos de um gás termica e caloricamente perfeito:
T +V 2
2cp
= T∞ +U2∞
2cp
(2.37)
na qualcp representa o calor específico a pressão constante do ar.Movimentando os termos e utilizando quecp = γR/(γ − 1):
T − T∞ =U2∞ − V 2
2γR/(γ − 1)(2.38)
Recordando quea∞ =√
γRT∞:
T
T∞− 1 =
γ − 1
2
U2∞ − V 2
γRT∞=
γ − 1
2
U2∞ − V 2
a2∞
(2.39)
Em termos de pequenas perturbações:
V 2 = (U∞ + u1)2 + u2
2 + u23 (2.40)
Substituindo (2.40) em (2.39) e fazendo as simplificações decorrentes:
T
T∞= 1− γ − 1
2a2∞
(2u1U∞ + u21 + u2
2 + u23) (2.41)
É conhecida, também, a relação entre pressão e temperatura para escoamentos isentrópicosp/p∞ =(T/T∞)γ/(γ−1) que, substituída em (2.41) gera:
p
p∞=
[1− γ − 1
2a2∞
(2u1U∞ + u21 + u2
2 + u23)
]γ/(γ−1)
(2.42)
Rearranjando os termos:
p
p∞=
[1− γ − 1
2M2∞
(2u1
U∞+
u21 + u2
2 + u23
U2∞
)]γ/(γ−1)
(2.43)
Aplicando novamente a expansão binomial:
p
p∞≈ 1− γ
2M2∞
(2u1
U∞+
u21 + u2
2 + u23
U2∞
)(2.44)
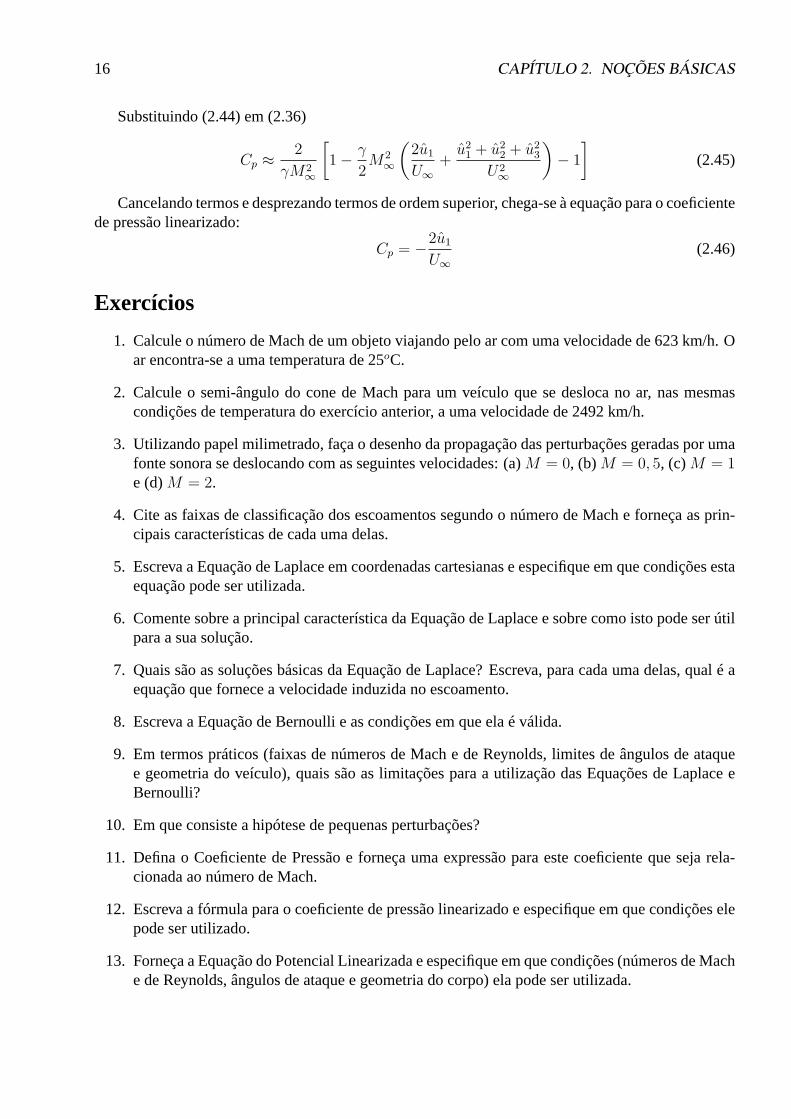
16 CAPÍTULO 2. NOÇÕES BÁSICAS
Substituindo (2.44) em (2.36)
Cp ≈2
γM2∞
[1− γ
2M2∞
(2u1
U∞+
u21 + u2
2 + u23
U2∞
)− 1
](2.45)
Cancelando termos e desprezando termos de ordem superior, chega-se à equação para o coeficientede pressão linearizado:
Cp = −2u1
U∞(2.46)
Exercícios
1. Calcule o número de Mach de um objeto viajando pelo ar com uma velocidade de 623 km/h. Oar encontra-se a uma temperatura de 25oC.
2. Calcule o semi-ângulo do cone de Mach para um veículo que se desloca no ar, nas mesmascondições de temperatura do exercício anterior, a uma velocidade de 2492 km/h.
3. Utilizando papel milimetrado, faça o desenho da propagação das perturbações geradas por umafonte sonora se deslocando com as seguintes velocidades: (a)M = 0, (b) M = 0, 5, (c) M = 1e (d)M = 2.
4. Cite as faixas de classificação dos escoamentos segundo o número de Mach e forneça as prin-cipais características de cada uma delas.
5. Escreva a Equação de Laplace em coordenadas cartesianas e especifique em que condições estaequação pode ser utilizada.
6. Comente sobre a principal característica da Equação de Laplace e sobre como isto pode ser útilpara a sua solução.
7. Quais são as soluções básicas da Equação de Laplace? Escreva, para cada uma delas, qual é aequação que fornece a velocidade induzida no escoamento.
8. Escreva a Equação de Bernoulli e as condições em que ela é válida.
9. Em termos práticos (faixas de números de Mach e de Reynolds, limites de ângulos de ataquee geometria do veículo), quais são as limitações para a utilização das Equações de Laplace eBernoulli?
10. Em que consiste a hipótese de pequenas perturbações?
11. Defina o Coeficiente de Pressão e forneça uma expressão para este coeficiente que seja rela-cionada ao número de Mach.
12. Escreva a fórmula para o coeficiente de pressão linearizado e especifique em que condições elepode ser utilizado.
13. Forneça a Equação do Potencial Linearizada e especifique em que condições (números de Mache de Reynolds, ângulos de ataque e geometria do corpo) ela pode ser utilizada.
Capítulo 3
Regras de similaridade para escoamentoscompressíveis
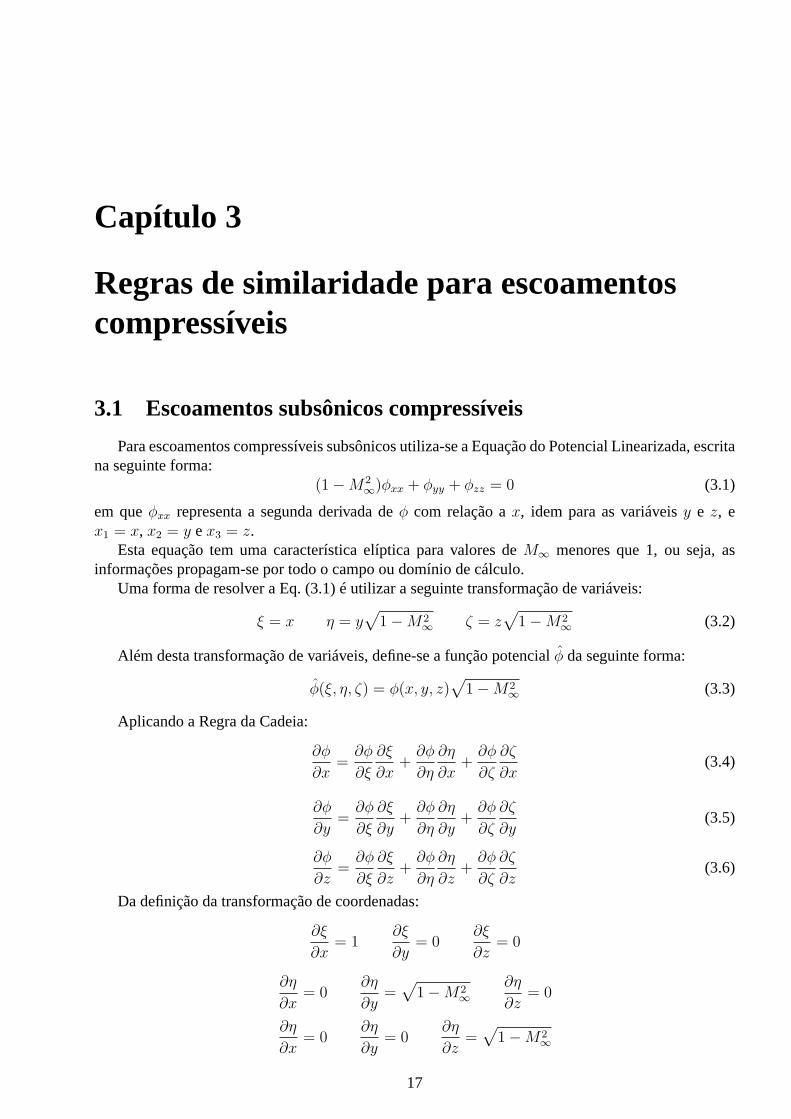
3.1 Escoamentos subsônicos compressíveis
Para escoamentos compressíveis subsônicos utiliza-se a Equação do Potencial Linearizada, escritana seguinte forma:
(1−M2∞)φxx + φyy + φzz = 0 (3.1)
em queφxx representa a segunda derivada deφ com relação ax, idem para as variáveisy e z, ex1 = x, x2 = y ex3 = z.
Esta equação tem uma característica elíptica para valores deM∞ menores que 1, ou seja, asinformações propagam-se por todo o campo ou domínio de cálculo.
Uma forma de resolver a Eq. (3.1) é utilizar a seguinte transformação de variáveis:
ξ = x η = y√
1−M2∞ ζ = z
√1−M2
∞ (3.2)
Além desta transformação de variáveis, define-se a função potencialφ da seguinte forma:
φ(ξ, η, ζ) = φ(x, y, z)√
1−M2∞ (3.3)
Aplicando a Regra da Cadeia:
∂φ
∂x=
∂φ
∂ξ
∂ξ
∂x+
∂φ
∂η
∂η
∂x+
∂φ
∂ζ
∂ζ
∂x(3.4)
∂φ
∂y=
∂φ
∂ξ
∂ξ
∂y+
∂φ
∂η
∂η
∂y+
∂φ
∂ζ
∂ζ
∂y(3.5)
∂φ
∂z=
∂φ
∂ξ
∂ξ
∂z+
∂φ
∂η
∂η
∂z+
∂φ
∂ζ
∂ζ
∂z(3.6)
Da definição da transformação de coordenadas:
∂ξ
∂x= 1
∂ξ
∂y= 0
∂ξ
∂z= 0
∂η
∂x= 0
∂η
∂y=√
1−M2∞
∂η
∂z= 0
∂η
∂x= 0
∂η
∂y= 0
∂η
∂z=√
1−M2∞
17

18 CAPÍTULO 3. REGRAS DE SIMILARIDADE PARA ESCOAMENTOS COMPRESSÍVEIS
Fazendo as devidas substituições:
∂φ
∂x=
∂φ
∂ξ(3.7)
∂φ
∂y=√
1−M2∞
∂φ
∂η(3.8)
∂φ
∂z=√
1−M2∞
∂φ
∂ζ(3.9)
Da mesma forma:
φxx =∂φx
∂x=
∂φξ
∂ξ= φξξ (3.10)
φyy =∂φy
∂y= (1−M2
∞)∂φη
∂η= (1−M2
∞)φηη (3.11)
φzz =∂φz
∂z= (1−M2
∞)∂φζ
∂ζ= (1−M2
∞)φζζ (3.12)
Substituindo as Eqs. (3.12) em (3.1):
(1−M2∞)φξξ + (1−M2
∞)φηη + (1−M2∞)φζζ = 0 (3.13)
Substituindo o novo potencialφ, definido pela Eq. (3.3), na Eq. (3.13) e fazendo as devidas sim-plificações:
φξξ + φηη + φζζ = 0 (3.14)
A Equação (3.14) corresponde à Equação de Laplace que governa a solução de escoamentosincompressíveis. Assim sendo, a transformação proposta na geometria do corpo imerso em um es-coamento compressível leva a uma nova geometria que pode ser resolvida pela Equação de Laplace.Esta é a denominada Transformação de Prandtl-Glauert.
O coeficiente de pressão linearizado é dado pela expressão:
Cp = −2u
U∞= − 2
U∞
∂φ
∂x(3.15)
Fazendo as substituições devidas:
Cp = − 2
U∞
1√1−M2
∞
∂φ
∂x=
1√1−M2
∞
(− 2
U∞
∂φ
∂ξ
)(3.16)
Notando que o último termo do lado direito da Eq. (3.16) corresponde ao coeficiente de pressãopara o escoamento incompressível, oCp no corpo original é relacionado ao(Cp)M=0:
Cp =(Cp)M=0√1−M2
∞(3.17)
A Equação (3.17) simboliza, também, o que é conhecido como Regra de Prandtl-Glauert paraescoamentos subsônicos compressíveis.

3.2. ESCOAMENTOS SUPERSÔNICOS 19
3.2 Escoamentos supersônicos
A equação linearizada que traduz o comportamento dinâmico de escoamentos no regime super-sônico é a mesma Eq. (2.32) do regime subsônico. No entanto, para velocidades supersônicas, utiliza-se uma pequena alteração na forma de escrevê-la:
(M2∞ − 1)φxx − φyy − φzz = 0 (3.18)
No caso de valores do número de Mach acima da unidade, a Eq. (3.18) assume um caráter hiper-bólico, ou seja, as perturbações geradas em um ponto do escoamento somente são percebidas emcertas regiões do domínio de cálculo. Como já foi visto anteriormente, esta região está contida noCone de Mach cujo vértice é o ponto do escoamento e seu eixo está na direção do escoamento não-perturbado.
Para a determinação de condições de similaridade, da mesma forma como foi obtido para o regimesubsônico compressível, será utilizada uma simplificação da Eq. (3.18) para duas dimensões:
(M2∞ − 1)φxx − φyy = 0 (3.19)
Ocorre, também, que, na forma como está apresentada, a Eq. (3.19)corresponde à Equação daOnda, que tem solução conhecida e pode ser dada por:
φ(x, y) = F (x− βy) + G(x + βy) (3.20)
em queF e G são funções das variáveisξ = x − βy e η = x + βy, respectivamente. O parâmetroβ =
√M2∞ − 1 é uma constante para cadaM∞.
Avaliando a primeira derivada parcial deφ com relação ax:
∂φ
∂x=
∂F
∂ξ
∂ξ
∂x+
∂G
∂η
∂η
∂x
As derivadas deF (ξ) eG(η) com relação às suas respectivas variáveis serão chamadas, simples-mente, deF ′ eG′. O mesmo vale para as segundas derivadasF ′′ eG′′ e assim por diante. Assim:
∂φ
∂x= F ′ + G′
A segunda derivada parcial deφ com relação ax:
∂2φ
∂x2=
∂
∂x
(∂φ
∂x
)=
∂F ′
∂ξ
∂ξ
∂x+
∂G′
∂η
∂η
∂x= F ′′ + G′′
Avaliando, desta vez, a primeira derivada parcial deφ com relação ay:
∂φ
∂y=
∂F
∂ξ
∂ξ
∂y+
∂G
∂η
∂η
∂y= −βF ′ + βG′ = −β(F ′ −G′)
A segunda derivada parcial deφ com relação ay fica, então:
∂2φ
∂y2=
∂
∂y
(∂φ
∂y
)=
∂(−βF ′)
∂ξ
∂ξ
∂y+
∂(βG′)
∂η
∂η
∂y= β2(F ′′ + G′′)
Substituindo as expressões obtidas para as segundas derivadas parciais deφ na Eq. (3.19):
(M2∞ − 1)(F ′′ + G′′)− β2(F ′′ + G′′) = (M2
∞ − 1)(F ′′ + G′′)− (M2∞ − 1)(F ′′ + G′′) = 0

20 CAPÍTULO 3. REGRAS DE SIMILARIDADE PARA ESCOAMENTOS COMPRESSÍVEIS
Nota-se, desta forma, que a função potencialφ(x, y) = F (ξ) + G(η), especificada na Eq. (3.20),representa uma solução da Eq. (3.19). É possível, então, calcular o coeficiente de pressão associado aesta solução.
Nota-se, também, que a funçãoξ = x − βy representa um conjunto de retas caminhando nosentido positivo dey quando o valor dex sofre um acréscimo. Estas são as chamadas “left runningwaves”, uma vez que carregam informações que se propagam para o lado esquerdo de um observadorsolidário ao escoamento não-perturbado.
De forma similar, a funçãoη = x + βy representa um conjunto de retas caminhando no sentidonegativo dey à medida em quex aumenta. São chamadas de “right running waves” pois transportaminformações que se propagam para o lado direito de um observador solidário ao escoamento não-perturbado.
Lembra-se que, na hipótese de pequenas perturbações, admitiu-se que as variações de velocidadesão pequenas quando comparadas com a velocidade do escoamento não perturbado e que a dimensãodo corpo na direçãox é significativamente maior que nas direçõesy e z.
Primeiramente, deve-se estabelecer uma condição de contorno de tangência do escoamento à su-perfície do corpo. Esta condição de tangência, apesar de não ser aplicável a escoamentos viscosos, éapropriada para escoamentos não-viscosos.
Tomando-se por base a descrição da superfície do corpo dada pela expressão:
y = h(x) (3.21)
A condição de tangência do escoamento à superfície do corpo pode ser obtida fazendo-se a direçãoda velocidade local do escoamento coincidir com a direção local da superfície do corpo. Após anecessária linearização:
vy
U∞=
dh
dx⇒ vy = U∞
dh
dx(3.22)
A solução na parte superior da superfície do corpo é constituída apenas por ondas que caminhamna direção dey positivo, ou seja,φ(x, y) = F (ξ). As informações transportadas porη = x + βynão chegam a se propagar pois encontram a própria superfície do corpo como barreira. Assim, avelocidade no eixoy pode ser obtida por:
vy =∂φ
∂y=
∂F
∂ξ
∂ξ
∂y= −βF ′
Comparando a expressão acima com a Eq. (3.22) obtém-se:
vy = U∞dh
dx= −βF ′ ⇒ F ′ = −U∞
β
dh
dx(3.23)
O coeficiente de pressão na superfície do corpo é dado pela Eq. (2.46), que, após as devidasconversões de nomenclatura e substituição da velocidade de perturbação emx, fica:
Cp = − 2
U∞
∂φ
∂x= − 2
U∞F ′ = − 2
U∞
(−U∞
β
dh
dx
)(3.24)
Cancelando termos, o coeficiente de pressão linearizado para a superfície superior do corpo fica:
(Cp)sup =2
β
(dh
dx
)sup
(3.25)
Para a superfície inferior do corpo, a solução passa a serφ(x, y) = G(η), uma vez que as pertur-bações carregadas pelas “left running waves” são neutralizadas pela parede do próprio corpo.

3.3. ESCOAMENTOS TRANSÔNICOS 21
A velocidade no eixoy fica, então:
vy =∂φ
∂y=
∂G
∂η
∂η
∂y= βG′
A condição de tangência fornece a velocidade na direçãoy que, quando comparada com a veloci-dade dada pela expressão acima, produz:
vy = U∞dh
dx= βG′ ⇒ G′ =
U∞β
dh
dx(3.26)
Para o coeficiente de pressão na superfície inferior:
Cp = − 2
U∞
∂φ
∂x= − 2
U∞G′ = − 2
U∞
(U∞β
dh
dx
)(3.27)
Cancelando termos, o coeficiente de pressão linearizado para a superfície inferior do corpo fica:
(Cp)inf = − 2
β
(dh
dx
)inf
(3.28)
É relativamente simples perceber que os coeficientes de pressão variam para a mesma superfície,em função do Número de Mach do escoamento não-perturbado, de acordo com a expressão:
Cp = ± 2√M2∞ − 1
dh
dx(3.29)
Percebe-se que, paraM∞ =√
2, o valor deβ equivale à unidade. Assim, pode escrever que:
Cp =(Cp)M=
√2√
M2∞ − 1
(3.30)
A regra de similaridade expressa pela Eq. (3.30) é conhecida como Fórmula de Ackeret.
3.3 Escoamentos transônicos
O escoamento transônico não pode ser modelado por equações diferenciais parciais lineares, de-vido à presença de ondas de choque relativamente fortes sobre a superfície do corpo, constituindo-seem não-linearidades importantes.
A equação mais apropriada para o estudo de escoamentos transônicos tridimensionais é:
(1−M2∞)
∂2φ
∂x2+
∂2φ
∂y2+
∂2φ
∂z2=
2
U∞
(1 +
γ − 1
2M2∞
)M2∞
∂φ
∂x
∂2φ
∂x2(3.31)
Para uma velocidade do escoamento não-perturbado equivalente aM∞ = 1, a Eq. (3.31) pode serreescrita como:
−(γ + 1)
U∞
∂φ
∂x
∂2φ
∂x2+
∂2φ
∂y2+
∂2φ
∂z2= 0 (3.32)
Seja a transformação:
ξ = x η = c3y ζ = c3z φ = c4φ U∞ = U∞ (3.33)

22 CAPÍTULO 3. REGRAS DE SIMILARIDADE PARA ESCOAMENTOS COMPRESSÍVEIS
Fazendoc23 = c4 e introduzindo as definições da transformação descrita por (3.33) em (3.32):
−(γ + 1)
U∞
∂φ
∂ξ
∂2φ
∂ξ2+
(∂2φ
∂η2+
∂2φ
∂ζ2
)= 0 (3.34)
Outra condição deve ser satisfeita. Trata-se da similaridade entre as linhas de corrente, que éobtida fazendo-se:
w = U∞∂zc
∂xw = U∞
∂ζc
∂ξ(3.35)
em quezc eζc representam o contorno do perfil da asa no plano real e no plano transformado, respec-tivamente.
Substituindo os valores das Eqs. (3.33) em (3.35):
c3c4 =
∂zc
∂x∂ζc
∂ξ
=δ
δ(3.36)
na qualδ = t/c é a espessura relativa do perfil da asa, que foi admitido ser simétrico.Como foi admitido, também, quec2
3 = c4:
c3 =
(δ
δ
)1/3
c4 =
(δ
δ
)2/3
(3.37)
A equação linearizada do coeficiente de pressão fornece:
Cp = − 2
U∞
∂φ
∂x= −c4
2
U∞
∂φ
∂ξ= c4Cp =
(δ
δ
)2/3
Cp (3.38)
Conclui-se, da observação da Eq. (3.38) que o coeficiente de pressão na superfície da asa tran-sônica é proporcional aδ2/3 = (t/c)2/3.
Devido à não-linearidade da Eq. (3.31), soluções analíticas para escoamentos transônicos compresença de ondas de choque foram obtidas apenas para pouquíssimos casos. Em algumas situações,no entanto, já foi observada uma transição suave através da velocidade sônica (sem a formação dechoques). Neste último caso, escoamentos transônicos podem ser tratados de forma teórica por meiode um método de aproximações.
Estas aproximações levam a regras de similaridade para a distribuição de pressão e para o coefici-ente de arrasto que apresentam uma boa concordância com medidas experimentais. Pode ser demons-trado, embora isto não seja feito neste texto, que a regra de similaridade transônica mantém-se válidamesmo quando o escoamento apresenta ondas de choque fracas.
Cp
(x
c,t
c, M∞
)=
(t/c)2/3
(γ + 1)1/3Cp
(x
c, m∞
)(3.39)
CD
(t
c, M∞
)=
(t/c)5/3
(γ + 1)1/3CD(m∞) (3.40)
em que
m∞ =M2∞ − 1[
(γ + 1)t
c
]2/3(3.41)
A variável Cp é chamada de coeficiente de pressão reduzido eCD de coeficiente de arrasto re-duzido. Das equações anteriores decorre que o coeficiente de pressão é proporcional a(t/c)2/3 en-quanto que o coeficiente de arrasto é proporcional a(t/c)5/3 no regime transônico.
3.3. ESCOAMENTOS TRANSÔNICOS 23
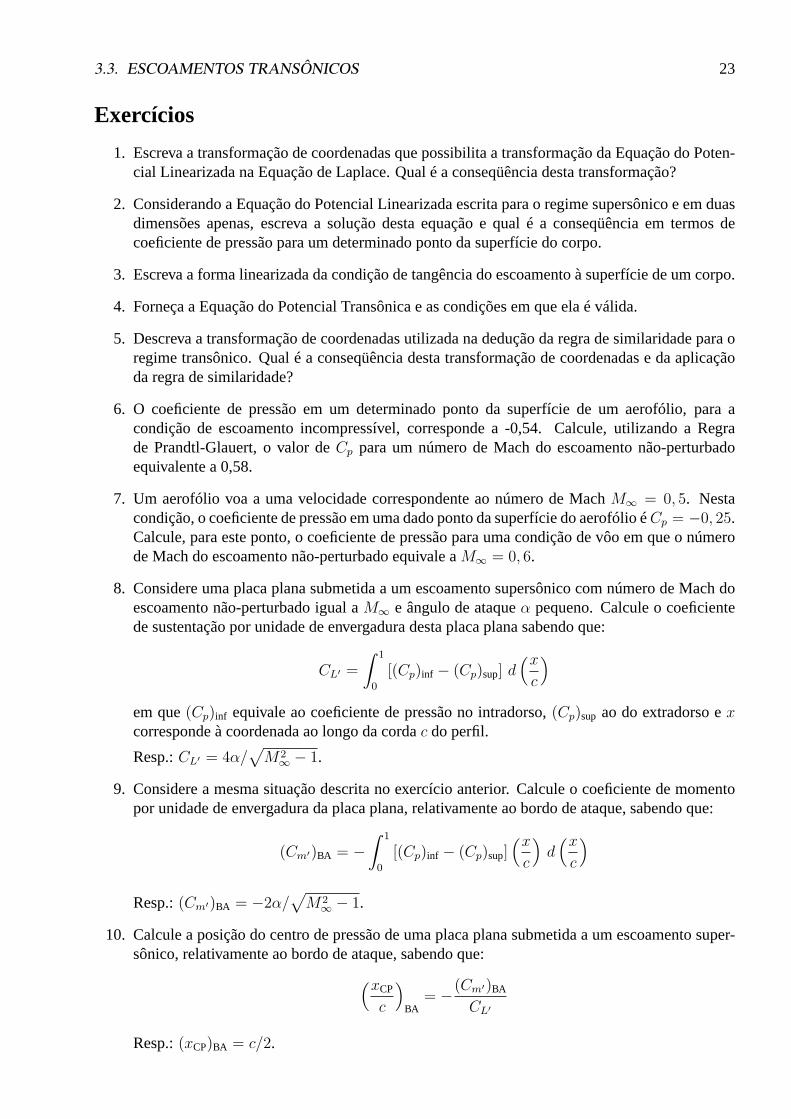
Exercícios
1. Escreva a transformação de coordenadas que possibilita a transformação da Equação do Poten-cial Linearizada na Equação de Laplace. Qual é a conseqüência desta transformação?
2. Considerando a Equação do Potencial Linearizada escrita para o regime supersônico e em duasdimensões apenas, escreva a solução desta equação e qual é a conseqüência em termos decoeficiente de pressão para um determinado ponto da superfície do corpo.
3. Escreva a forma linearizada da condição de tangência do escoamento à superfície de um corpo.
4. Forneça a Equação do Potencial Transônica e as condições em que ela é válida.
5. Descreva a transformação de coordenadas utilizada na dedução da regra de similaridade para oregime transônico. Qual é a conseqüência desta transformação de coordenadas e da aplicaçãoda regra de similaridade?
6. O coeficiente de pressão em um determinado ponto da superfície de um aerofólio, para acondição de escoamento incompressível, corresponde a -0,54. Calcule, utilizando a Regrade Prandtl-Glauert, o valor deCp para um número de Mach do escoamento não-perturbadoequivalente a 0,58.
7. Um aerofólio voa a uma velocidade correspondente ao número de MachM∞ = 0, 5. Nestacondição, o coeficiente de pressão em uma dado ponto da superfície do aerofólio éCp = −0, 25.Calcule, para este ponto, o coeficiente de pressão para uma condição de vôo em que o númerode Mach do escoamento não-perturbado equivale aM∞ = 0, 6.
8. Considere uma placa plana submetida a um escoamento supersônico com número de Mach doescoamento não-perturbado igual aM∞ e ângulo de ataqueα pequeno. Calcule o coeficientede sustentação por unidade de envergadura desta placa plana sabendo que:
CL′ =
∫ 1
0
[(Cp)inf − (Cp)sup] d(x
c
)em que(Cp)inf equivale ao coeficiente de pressão no intradorso,(Cp)sup ao do extradorso excorresponde à coordenada ao longo da cordac do perfil.
Resp.:CL′ = 4α/√
M2∞ − 1.
9. Considere a mesma situação descrita no exercício anterior. Calcule o coeficiente de momentopor unidade de envergadura da placa plana, relativamente ao bordo de ataque, sabendo que:
(Cm′)BA = −∫ 1
0
[(Cp)inf − (Cp)sup](x
c
)d(x
c
)Resp.:(Cm′)BA = −2α/
√M2∞ − 1.
10. Calcule a posição do centro de pressão de uma placa plana submetida a um escoamento super-sônico, relativamente ao bordo de ataque, sabendo que:(xCP
c
)BA
= −(Cm′)BA
CL′
Resp.:(xCP)BA = c/2.

24 CAPÍTULO 3. REGRAS DE SIMILARIDADE PARA ESCOAMENTOS COMPRESSÍVEIS
11. Um perfil com espessura relativa de 10% (t/c = 0, 1) encontra-se submetido a um escoamentode ar (γ = 1, 4) com número de Mach relativo ao escoamento não-perturbado de 0,95. Em umdeterminado ponto de sua superfície, o coeficiente de pressão corresponde a 0,5. Encontre osvalores do coeficiente de pressão reduzido e dom∞ para esse ponto.
Referências Bibliográficas
[1] SCHLICHTING, H.; TRUCKENBRODT, E. Aerodynamics of the airplane, New York: McGraw-Hill, 1979.
[2] ANDERSON, J. D. Fundamentals of Aerodynamics, 2nd Edition, New York:McGraw-Hill, 1991.
[3] BERTIN, J. J.; SMITH , M. L. Aerodynamics for Engineers, 3rd Edition, Upper SaddleRiver:Prentice-Hall, 1998.
[4] HALLIDAY , D.; RESNICK, R.; WALKER , J. Fundamentals of Physics, 4th Edition, New York:John Wiley & Sons, 1993.
[5] BISPLINGHOFF, R. L.; ASHLEY, H.; HALFMAN , R. L. Aeroelasticity, New York: Dover Pub-lications, 1996.
[6] FUNG, Y. C. An Introduction to the Theory of Aeroelasticity, New York: Dover Publications,1993.
[7] SCHMIDT, L. V. Introduction to Aircraft Flight Dynamics, AIAA Educational Series, 1998.
[8] ANDERSON, J. D. Introduction to Flight, McGraw-Hill, 199?.
[9] BOLTON, W. Engenharia de Controle, 1995.
25