La Importancia de La Etica y Valores en Los Profesionista en El Campo Empresarial

H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 1
3. Valores y Vectores Característicos
3.1. Introducción
El producto de una matriz cuadrada, A, por un vector (matriz columna), x, es otro vector,
cuyas componentes son habitualmente no proporcionales a x. Sin embargo, puede
existir un vector φφφφ no nulo tal que:
A φ φ φ φ = λ φ φ φ φ (3.1a)
Se dice entonces que φφφφ es un vector característico (también llamado vector propio,
eigenvector o modo) de la matriz A. El correspondiente escalar λ es un valor
característico (también llamado valor propio, autovalor o eigenvalor). Nótese que si un
vector satisface las ecuaciones (3.1a) también un múltiplo arbitrario (un vector "paralelo")
es solución. Sin embargo, se trata esencialmente de la misma solución; los vectores
característicos sólo se califican como distintos si sus componentes no son
proporcionales.
Por ejemplo,
=
−−
1
11
1
1
21
12
−=
−
−−
1
13
1
1
21
12
en este caso
=1
11φφφφ y
−=
1
12φφφφ son vectores característicos, a los que corresponden
los valores propios 1 y 3, respectivamente. Otros vectores, no paralelos a los dos antes
mencionados, no cumplen la condición (3.1a):
=
−−
3
0
2
1
21
12
El vector
3
0 no puede expresarse como un múltiplo de
2
1.
El problema clásico de valores y vectores característicos consiste en la determinación de
los vectores φφφφ y los correspondientes escalares λ para los que se cumple (3.1a). Con
frecuencia se presenta el problema general:
A φ φ φ φ = λ B φφφφ (3.1b)
En muchas aplicaciones las matrices A y B son simétricas y definidas positivas. En
algunos casos se hacen hipótesis simplificadoras que resultan en B diagonal. El
problema clásico, definido en (3.1a), corresponde al caso particular B = I.
3.1.1 Conversión del Problema General a la Forma C lásica
Un problema de la forma general (3.1b) puede convertirse a otro equivalente de la forma
clásica (3.1a). Así por ejemplo, si B es no singular puede determinarse:
B-1 A φ φ φ φ = λ φ φ φ φ (3.2)

H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 2
Sin embargo, si A y B son simétricas (como es, por ejemplo, el caso en problemas de
vibración, en los que esas matrices son respectivamente rigideces y masas) conviene
más hacer la descomposición (Cholesky):
B = RT R (3.3a)
y efectuar entonces el cambio de variables
φ φ φ φ = R-1 z (3.3b)
con lo que se obtiene:
(R-1)T A R-1 z = λ z (3.3c)
Esto es particularmente fácil si B es diagonal.
B = B½ B½
φ φ φ φ = B-½ z (3.4)
B-½ A B-½ z = H z = λ z
Donde ji
ijij
bb
ah = .
Nótese que los valores característicos son los mismos que los del problema original; los
correspondientes vectores característicos se relacionan mediante (3.4b).
3.1.2 Polinomio Característico y Valores Propios
Las ecuaciones A φ φ φ φ = λ B φφφφ pueden también rescribirse como:
(A - λ B) φφφφ = 0 (3.5a)
que tiene soluciones no triviales sólo si la matriz (A - λ B) es singular, es decir, si:
( ) ( ) 0det =λ−=λ BAp (3.5b)
( )λp se denomina polinomio característico. Siendo A y B matrices cuadradas de orden
n, ( )λp es un polinomio de grado n, cuyas raíces son λ1, λ2, ٠٠٠ λn. En lo que sigue se
supone, sin perder generalidad, que: nλ≤⋅⋅⋅≤λ≤λ≤λ 321
3.1.3 Independencia Lineal de los Vectores Caracte rísticos
Asociado a cada uno de los n valores característicos λ i se tiene un vector φφφφi. Si λ i es
una raíz de multiplicidad m, el correspondiente vector φφφφi puede obtenerse resolviendo el
sistema de ecuaciones homogéneas: (A - λ i B) φφφφi = 0 suponiendo m componentes
arbitrarias en φφφφi.
Los vectores característicos correspondientes a valores característicos distintos son
linealmente independientes. Supóngase que éste no fuera el caso, pudiéndose obtener
uno de los vectores como combinación lineal de otros que sí son linealmente
independientes:
∑=
=j
i
iis c1
φφφφφφφφ (3.6a)
Y entonces:
H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 3
∑∑==
==j
i
iιi
j
i
iis λcc11
φφφφφφφφΑφΑφΑφΑφ ΒΒΒΒΑΑΑΑ (3.6b)
Por otro lado, por la definición del problema, (3.1b):
∑=
==j
i
isisss λcλ
1
φφφφφφφφΑφΑφΑφΑφ ΒΒΒΒΒΒΒΒ (3.6c)
Restando (3.6b) de (3.6c) se obtiene: ( ) 0=λ−∑=
j
i
iisi λc1
ΒφΒφΒφΒφ
Si isλ λ≠ debería entonces tenerse ci = 0 para todo i, lo que se opone a la hipótesis.
Excepcionalmente pueden presentarse valores característicos repetidos. Aún en este
caso es factible obtener vectores característicos linealmente independientes. Sin
embargo, el conjunto de vectores asociados a los valores característicos repetidos define
un subespacio, tal que cualquier vector del subespacio (es decir una combinación lineal
de aquellos tomados como base) es también un vector característico:
A φφφφ i = λ i B φφφφi
A φφφφ i = λ i B φφφφi (3.7)
A ( c1 φφφφ1 + c2 φφφφ2 + c3 φφφφ3 + … ) = λ i B ( c1 φφφφ1 + c2 φφφφ2 + c3 φφφφ3 + … )
Teniéndose n vectores característicos linealmente independientes de dimensión n, estos
constituyen una base completa. Cualquier otro vector de tal dimensión puede
expresarse como combinación lineal de los vectores característicos:
v = α1 φφφφ1 + α2 φφφφ2 + α3 φφφφ3 + … + αn φφφφn (3.8)
Por ejemplo, con los vectores característicos antes obtenidos:
−−
=
1
1
1
1
2
121
23
3.1.4 Ortogonalidad de los Vectores Característico s
Si las matrices A y B son Hermitianas (o simplemente simétricas) y definidas positivas,
los valores característicos de A φφφφ = λ B φ φ φ φ son todos reales y positivos. Para probar
esto basta considerar:
rsrrs φφφφφφφφφφφφφφφφ BΑ** λ= (3.9a)
srssr φφφφφφφφφφφφφφφφ BΑ** λ= (3.9b)
El superíndice * denota aquí conjugada traspuesta. La conjugada transpuesta de la
segunda de estas expresiones es (recuérdese que sλ es un escalar):
rssrs φφφφφφφφφφφφφφφφ BΑ*** λ= (3.9c)
y al ser A y B Hermitianas (es decir A* = A y B* = B), restando (3.9c) de (3.9a) se
obtiene:
( ) 0** =λ−λ rssr φφφφφφφφ B (3.9d)
Si r=s, al ser B una matriz definida positiva se tendría 0>rr φφφφφφφφ B* . Por lo tanto, siendo
sr λ=λ , se tendría 0=λ−λ *rr lo que implica que todos los λ son números reales. Si
H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 4
además A es definida positiva, es decir 0>rr φφφφφφφφ A* , se concluye que los valores
característicos son todos positivos.
Por otro lado, si sr λ≠λ se tiene que 0≠λ−λ *sr y en consecuencia (3.9d) implica que:
rsrrs b δ=φφφφφφφφ B* (es decir, cero si sr ≠ ) (3.10a)
y además, observando las expresiones precedentes:
rsrrs a δ=φφφφφφφφ A* (3.10b)
Las propiedades de ortogonalidad expresadas en (3.10) son la base para la
descomposición modal utilizada al resolver sistemas de ecuaciones diferenciales en
aplicaciones tales como el análisis sísmico lineal.
Refiriéndose nuevamente al ejemplo inicial:
( ) 21
1
21
1211 =
−−
( ) 61
1
21
1211 =
−
−−
−
( ) 01
1
21
1211 =
−
−−
3.1.5 Normalización de los Vectores Característic os
Como se mencionó anteriormente los vectores característicos se definen por la
proporción de sus elementos, pudiéndose escalar o "normalizar" en forma arbitraria. Es
frecuente escalarlos de modo que:
rsrs δ=φφφφφφφφ B* (3.11a)
Se dice entonces que los vectores están normalizados respecto a la matriz B. En tal
caso se tiene también:
rsrrs δλ=φφφφφφφφ A* (3.11b)
3.1.6 Cociente de Rayleigh
Si se conoce un vector característico φφφφi, el correspondiente valor λ i puede determinarse
con el cociente de Rayleigh:
( )i
Ti
iTi
i φφφφφφφφφφφφφφφφφφφφ
B
Α=ρ (3.12)
Esta expresión puede aplicarse también con aproximaciones a los vectores propios. Si x
es una aproximación a un vector característico con un error de orden ε, el cociente de
Rayleigh, ρ(x), aproxima el correspondiente valor característico con un error de orden ε 2.
3.1.7 Teorema de Gershgorin
Supóngase que iλ es un valor característico de la matriz A y que iφφφφ es el
correspondiente vector, con componentes L321 vvv :

H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 5
iii φφφφφφφφ λ=A (3.13a)
La componente de mayor valor absoluto en iφφφφ es sv . Dividiendo la ecuación s en (3.13a)
entre sv e intercambiando ambos miembros:
++++
+
=λ
s
nsnss
ss
ssi v
vaa
v
va
v
va LL
22
11 (3.13b)
y por lo tanto:
snssssi aaaa +++++=−λ LL 021 (3.13c)
En consecuencia, cada valor característico iλ está dentro de por lo menos uno de los
círculos con centro en ssa y radio igual a la suma de los valores absolutos de la
correspondiente fila s.
Por ejemplo, considerando la matriz:
−−
=41
12A
que es definida positiva, puede asegurarse que sus valores característicos (que son
números reales) están dentro de los intervalos (1,3) y (3,5). Efectivamente, en este caso
23±=λ .
3.1.8 Formas polinómicas
Supóngase que se conocen los valores y vectores característicos de una matriz, A:
A φφφφ = λ φφφφ (3.14a)
¿Cuáles son los valores característicos de la matriz A2 = A A?
(AA) φφφφ = A (A φφφφ) = A (λ φφφφ) = λ (A φφφφ)= λ2 φφφφ
Este resultado puede extenderse para la matriz Ak (siendo k un exponente). Los
vectores característicos son los mismos que los de la matriz A, mientras que los
correspondientes valores característicos son λk:
Ak φφφφ = λk φφφφ (3.14b)
Esto es incluso válido para exponentes negativos. Por ejemplo, multiplicando ambos
miembros de (3.15a) por λ-1A-1 se obtiene:
A-1 φφφφ = λ-1 φφφφ (3.14c)
Por otro lado, combinando linealmente expresiones de la forma (3.14b) y teniendo en
cuenta que A0 = I (así como λ0 = 1):
(c0 I+ c1 A+ c2 A2 + c3 A
3 +...) φφφφ = (c0 + c1 λ+ c2 λ2 + c3 λ3 +...) φφφφ (3.14d)
Por ejemplo, si:
−−
=21
12A
tiene valores característicos 1 y 3, la matriz:
−−
==54
452 AAA

H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 6
tiene valores característicos 1 y 9 (es decir, los cuadrados de 1 y 3). Los vectores
característicos son los mismos para ambas matrices.
3.2 Métodos de Iteración con Vectores
Los métodos que se presentan en esta sección son los más eficientes cuando sólo se
requieren un valor característico y su vector asociado, o en todo caso cuando el número
de valores y vectores característicos por determinar es pequeño.
3.2.1 Iteración Directa
En la iteración "directa" se considera un vector inicial 0x y se obtiene una secuencia de
vectores corregidos, kx , mediante:
jj xAxB =+1 (3.15a)
1
11
+
++ =
j
jj r
xx (3.15b)
donde rj+1 es un escalar que normaliza el vector utilizado en la iteración. Lo habitual es
tomar rj+1 como el elemento de máximo valor absoluto en 1+jx , lo que significa escalar el
vector de aproximación de modo que la mayor componente sea igual a 1..
Este proceso converge al vector característico nφφφφ , asociado al valor característico de
mayor módulo, nλ . En efecto, la aproximación inicial x0 puede escribirse como:
x0 = α1 φφφφ1 + α2 φφφφ2 + α3 φφφφ3 + … + αn-1 φφφφn-1 + αn φφφφn (3.16a)
Recuérdese que los n vectores característicos son linealmente independientes y
constituyen una base completa en el espacio de dimensión n. Entonces (suponiendo
que B no es singular):
∑∑ λα=α= iiiii φφφφφφφφ BAxA 0 (3.16b)
01
1 AxBx −= = (α1 λ1) φφφφ1 + (α2 λ2) φφφφ2 + …+ (αn λn) φφφφn (3.16c)
y por lo tanto:
( )∑ λα=n
iir11
1x φφφφi (3.16d)
Se observa que, si las componentes de x0 eran αi, aquellas de x1 resultan proporcionales
a αi λi. Repitiendo pasos análogos a los indicados en (3.18), puede comprobarse que la
aproximación xk puede expresarse como combinación lineal de los vectores
característicos con coeficientes proporcionales a kiiλα (en este caso k es un exponente).
En consecuencia, si 121 λ≥≥λ≥λ≥λ −− Lnnn , las componentes según φφφφn crecen
más rápidamente que las otras y se tiene que:
=∞→ k
kLim x φφφφn (3.17a)
nkk
rLim λ=∞→
(3.17b)
Esto es válido aún cuando αn = 0 puesto que, por lo menos al tratar con grandes
matrices, los errores de redondeo (debidos a la aritmética imperfecta del computador)
introducen siempre una componente según φφφφn. La convergencia es muy rápida si
H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 7
1−λ>>λ nn o si x0 es aproximadamente paralelo a φφφφn (es decir, si la componente αn
es importante en relación a las demás). En cambio, si los últimos valores característicos
son similares la convergencia es en general muy lenta. Por otro lado, no se tienen
dificultades para el caso (más académico que práctico) en que 1−λ=λ nn : en tal caso el
proceso converge a un vector característico que resulta ser la proyección de x0 en el
subespacio definido por los vectores φφφφn y φφφφn-1.
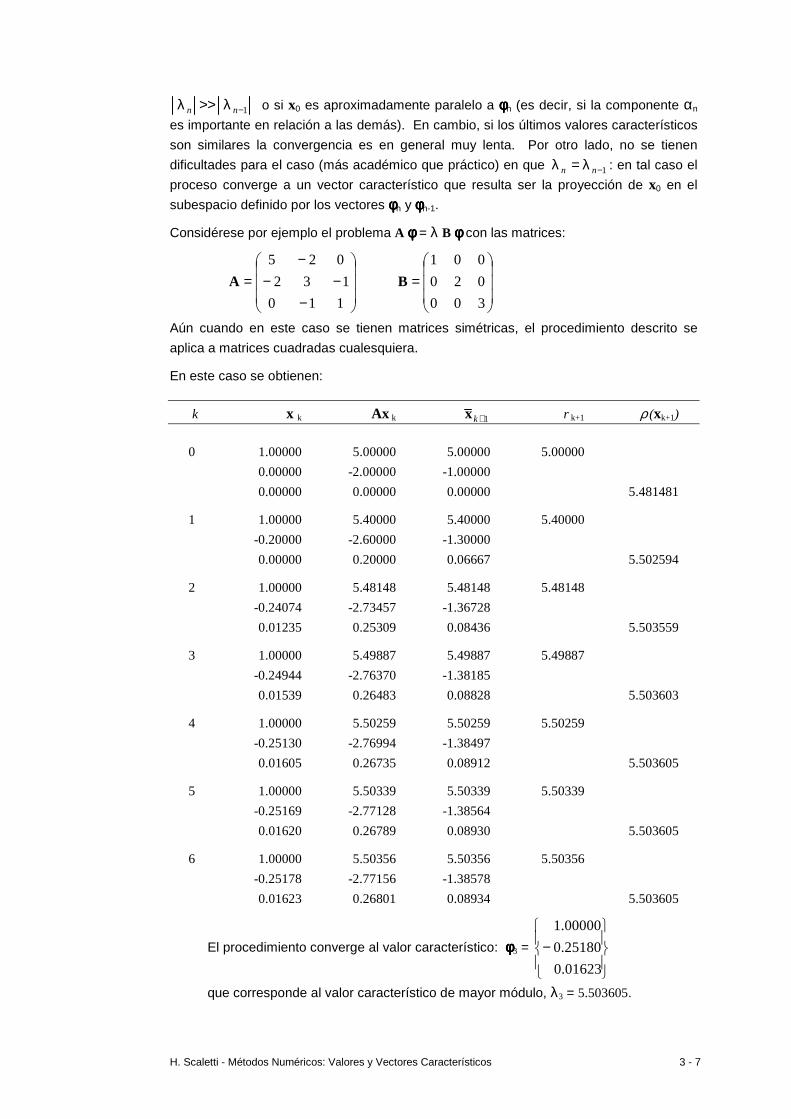
Considérese por ejemplo el problema A φ φ φ φ = λ B φφφφ con las matrices:
−−−
−=
110
132
025
A
=300
020
001
B
Aún cuando en este caso se tienen matrices simétricas, el procedimiento descrito se
aplica a matrices cuadradas cualesquiera.
En este caso se obtienen:
k x k Ax k 1+kx r k+1 ρ (xk+1)
0 1.00000 5.00000 5.00000 5.00000
0.00000 -2.00000 -1.00000
0.00000 0.00000 0.00000 5.481481
1 1.00000 5.40000 5.40000 5.40000
-0.20000 -2.60000 -1.30000
0.00000 0.20000 0.06667 5.502594
2 1.00000 5.48148 5.48148 5.48148
-0.24074 -2.73457 -1.36728
0.01235 0.25309 0.08436 5.503559
3 1.00000 5.49887 5.49887 5.49887
-0.24944 -2.76370 -1.38185
0.01539 0.26483 0.08828 5.503603
4 1.00000 5.50259 5.50259 5.50259
-0.25130 -2.76994 -1.38497
0.01605 0.26735 0.08912 5.503605
5 1.00000 5.50339 5.50339 5.50339
-0.25169 -2.77128 -1.38564
0.01620 0.26789 0.08930 5.503605
6 1.00000 5.50356 5.50356 5.50356
-0.25178 -2.77156 -1.38578
0.01623 0.26801 0.08934 5.503605
El procedimiento converge al valor característico: φφφφ3 =
−01623.0
25180.0
00000.1
que corresponde al valor característico de mayor módulo, λ3 = 5.503605.

H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 8
El valor de r es aproximadamente λn, pero el cociente de Rayleigh, ρ(x)" proporciona
siempre una aproximación mejor.
3.2.2 Iteración Inversa
El proceso de iteración directa antes descrito converge al vector característico asociado
al valor característico de mayor módulo. Éste puede ser útil al considerar el
condicionamiento de las matrices de coeficientes en grandes sistemas de ecuaciones, o
al analizar la estabilidad numérica de ciertos métodos para integrar sistemas de
ecuaciones diferenciales, pero por lo general tiene poca importancia en la respuesta del
sistema estudiado. Para determinar la respuesta de un sistema se requieren más bien
los valores característicos de menor módulo y sus vectores asociados.
Para determinar el vector característico asociado al valor propio de menor módulo (el
modo fundamental) puede usarse una "iteración inversa":
jj xBxA =+1 (3.18a)
1
11
+
++ =
j
jj r
xx (3.18b)
En este caso si:
x0 = α1 φφφφ1 + α2 φφφφ2 + α3 φφφφ3 + … + αn-1 φφφφn-1 + αn φφφφn (3.19a)
la aproximación xk puede expresarse como combinación lineal de los vectores
característicos con coeficientes proporcionales a kii λα (nuevamente, k es aquí un
exponente):
xk = k1
1
λα
φφφφ1 + k2
2
λα
φφφφ2 + k3
3
λα
φφφφ3 + … + kn
n
1
1
−
−
λα
φφφφn-1 + kn
n
λα
φφφφn (3.19b)
En consecuencia, si nλ≤⋅⋅⋅≤λ≤λ≤λ 321 al emplear la iteración inversa se tiene
que:
=∞→ k
kLim x φφφφ1 (3.20a)
1
1
λ=
∞→ kk
rLim (3.20b)
Los comentarios anteriores relativos a la convergencia de la iteración directa son
también válidos. En este caso la velocidad de convergencia depende de la razón λ2 / λ1.
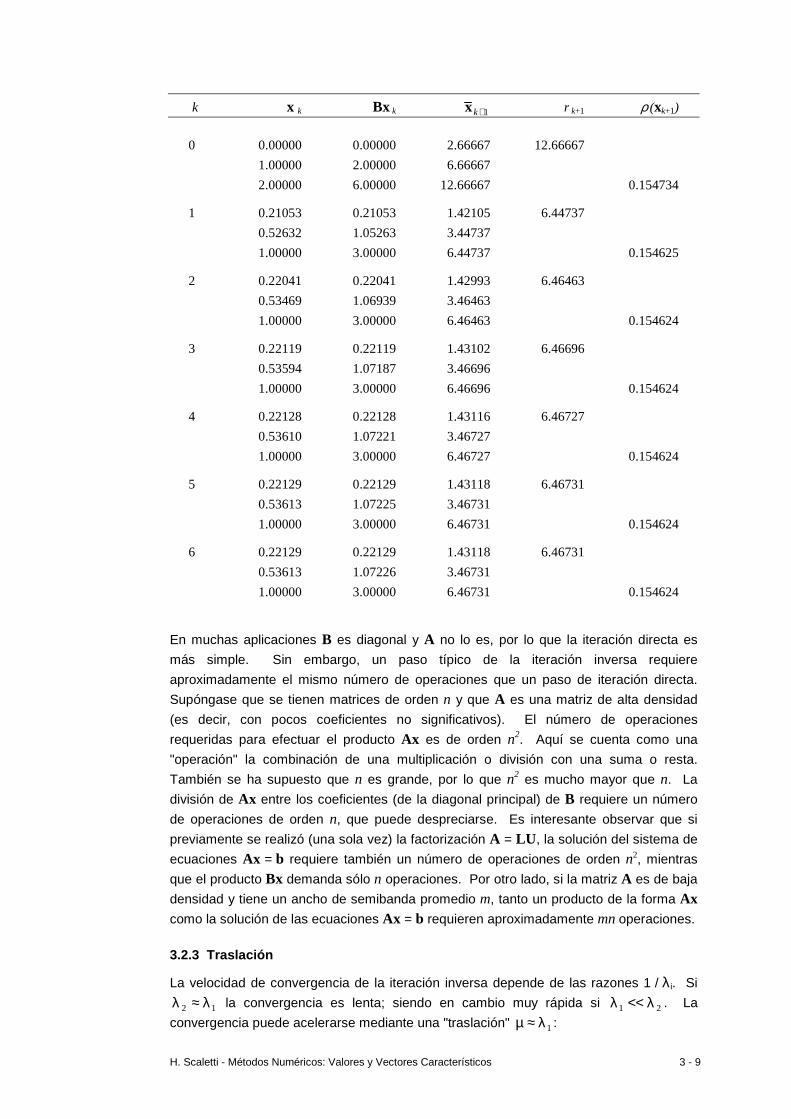
Para las matrices del caso anterior y considerando, por ejemplo, el vector inicial:
=2
1
0
0x
se obtiene el vector asociado al valor característico de menor módulo, es decir, λ1.
Nótese que r es ahora una aproximación de 1 / λ1, mientras que en la iteración directa lo
era de λn. También en este caso se observa que el cociente de Rayleigh es siempre una
mejor aproximación al valor característico.
H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 9
k x k Bx k 1+kx r k+1 ρ (xk+1)
0 0.00000 0.00000 2.66667 12.66667
1.00000 2.00000 6.66667
2.00000 6.00000 12.66667 0.154734
1 0.21053 0.21053 1.42105 6.44737
0.52632 1.05263 3.44737
1.00000 3.00000 6.44737 0.154625
2 0.22041 0.22041 1.42993 6.46463
0.53469 1.06939 3.46463
1.00000 3.00000 6.46463 0.154624
3 0.22119 0.22119 1.43102 6.46696
0.53594 1.07187 3.46696
1.00000 3.00000 6.46696 0.154624
4 0.22128 0.22128 1.43116 6.46727
0.53610 1.07221 3.46727
1.00000 3.00000 6.46727 0.154624
5 0.22129 0.22129 1.43118 6.46731
0.53613 1.07225 3.46731
1.00000 3.00000 6.46731 0.154624
6 0.22129 0.22129 1.43118 6.46731
0.53613 1.07226 3.46731
1.00000 3.00000 6.46731 0.154624
En muchas aplicaciones B es diagonal y A no lo es, por lo que la iteración directa es
más simple. Sin embargo, un paso típico de la iteración inversa requiere
aproximadamente el mismo número de operaciones que un paso de iteración directa.
Supóngase que se tienen matrices de orden n y que A es una matriz de alta densidad
(es decir, con pocos coeficientes no significativos). El número de operaciones
requeridas para efectuar el producto Ax es de orden n2. Aquí se cuenta como una
"operación" la combinación de una multiplicación o división con una suma o resta.
También se ha supuesto que n es grande, por lo que n2 es mucho mayor que n. La
división de Ax entre los coeficientes (de la diagonal principal) de B requiere un número
de operaciones de orden n, que puede despreciarse. Es interesante observar que si
previamente se realizó (una sola vez) la factorización A = LU, la solución del sistema de
ecuaciones Ax = b requiere también un número de operaciones de orden n2, mientras
que el producto Bx demanda sólo n operaciones. Por otro lado, si la matriz A es de baja
densidad y tiene un ancho de semibanda promedio m, tanto un producto de la forma Ax
como la solución de las ecuaciones Ax = b requieren aproximadamente mn operaciones.
3.2.3 Traslación
La velocidad de convergencia de la iteración inversa depende de las razones 1 / λi. Si
12 λ≈λ la convergencia es lenta; siendo en cambio muy rápida si 21 λ<<λ . La
convergencia puede acelerarse mediante una "traslación" 1λ≈µ :
H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 10
A φ φ φ φ = λ B φφφφ (3.21a)
(A - µB) φ φ φ φ = (λ−µ) B φφφφ (3.21b)
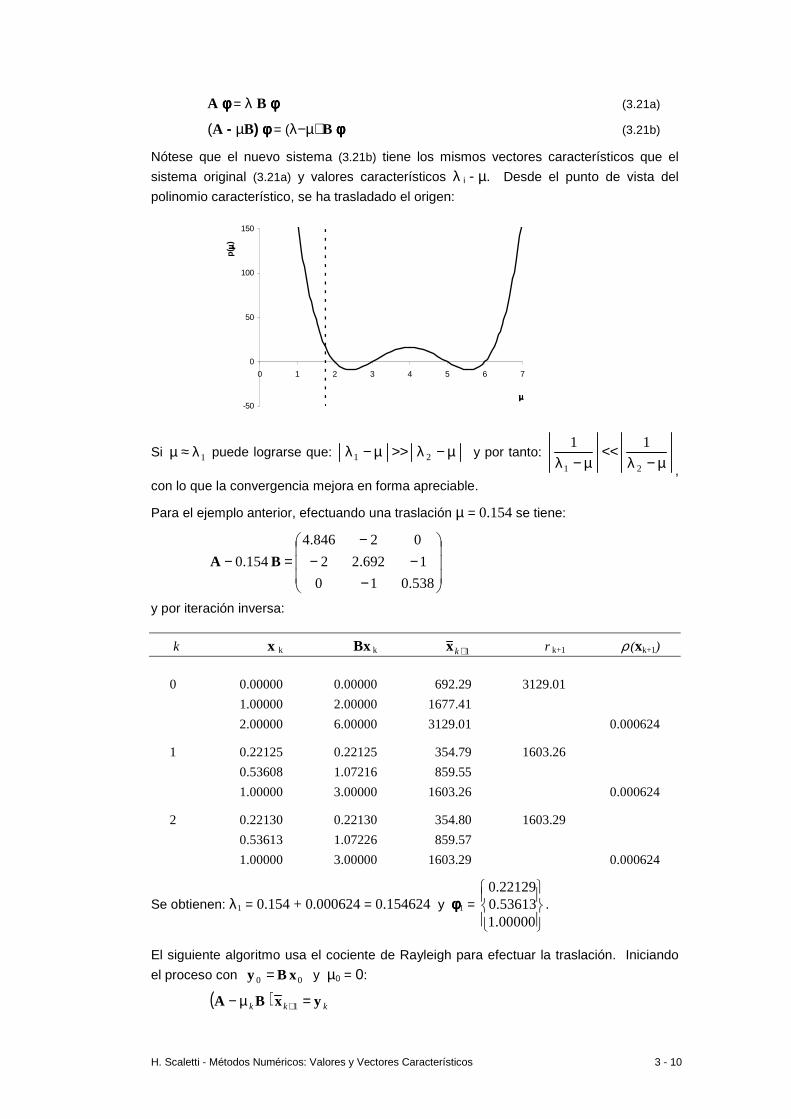
Nótese que el nuevo sistema (3.21b) tiene los mismos vectores característicos que el
sistema original (3.21a) y valores característicos λ i - µ. Desde el punto de vista del
polinomio característico, se ha trasladado el origen:
-50
0
50
100
150
0 1 2 3 4 5 6 7
µµµµ
p( µµ µµ
)
Si 1λ≈µ puede lograrse que:
µ−λ>>µ−λ 21
y por tanto:
µ−λ<<
µ−λ 21
11
,
con lo que la convergencia mejora en forma apreciable.
Para el ejemplo anterior, efectuando una traslación µ = 0.154 se tiene:
−−−
−=−
538.010
1692.22
02846.4
154.0 BA
y por iteración inversa:
k x k Bx k 1+kx r k+1 ρ (xk+1)
0 0.00000 0.00000 692.29 3129.01
1.00000 2.00000 1677.41
2.00000 6.00000 3129.01 0.000624
1 0.22125 0.22125 354.79 1603.26
0.53608 1.07216 859.55
1.00000 3.00000 1603.26 0.000624
2 0.22130 0.22130 354.80 1603.29
0.53613 1.07226 859.57
1.00000 3.00000 1603.29 0.000624
Se obtienen: λ1 = 0.154 + 0.000624 = 0.154624 y φφφφ1 =
00000.153613.022129.0
.
El siguiente algoritmo usa el cociente de Rayleigh para efectuar la traslación. Iniciando
el proceso con 00 xBy = y µ0 = 0:
( ) kkk yxBA =µ− +1
H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 11
11 ++ = kk xBy
11
11
++
++ +µ=µ
kTk
kTk
kkyx
yx (3.22)
( ) 121
111 +−
+++ = kkTkk yyxy
En relación con las expresiones precedentes:
By =∞→ k
kLim φφφφ1 (3.23a)
1λ=µ∞→ k
kLim (3.23b)
La convergencia es cúbica.
3.2.4 Determinación de Otros Vectores Característi cos
En los párrafos precedentes se ha visto cómo mediante iteración directa o inversa
pueden obtenerse φφφφn o φφφφ1 respectivamente. Podría determinarse un valor característico
intermedio y su vector asociado por iteración inversa con una traslación adecuada; sin
embargo, esto requeriría un procedimiento previo para definir la traslación.
En los que sigue se describe la determinación de sucesivos vectores característicos
aprovechando las condiciones de ortogonalidad para el caso en que las matrices A y B
son simétricas. La idea básica consiste en iterar con vectores ortogonales a los
previamente obtenidos. Desafortunadamente, el proceso acumula los errores de los
vectores previos y cada nuevo vector se determina siempre con menos precisión que el
anterior. En la práctica se observa que se pierde una cifra significativa por cada nuevo
vector; por tanto, no es factible determinar por este método más de unos 10 vectores
característicos. En algunas aplicaciones esto puede no ser suficiente.
A partir de un vector arbitrario:
v = α1 φφφφ1 + α2 φφφφ2 + α3 φφφφ3 + ... + αn φφφφn (3.24a)
puede obtenerse un vector ortogonal a los vectores característicos ya conocidos
haciendo uso de las relaciones de ortogonalidad:
φφφφiT B v = α1 φφφφi
T B φφφφ1 + α2 φφφφiT B φφφφ2 + ... + αn φφφφi
T B φφφφn
φφφφiT B v = αi φφφφi
T B φφφφi (3.24b)
es decir:
αi = ( φφφφiT B v ) / ( φφφφi
T B φφφφi ) (3.24c)
Luego es suficiente restar de v los αi φφφφi para obtener un vector que (salvo por la
imprecisión en la aritmética no tiene componentes según los vectores característicos
previamente hallados.
Para el ejemplo antes tratado, suponiendo que se haya obtenido el primer vector
característico:
φφφφ1 =
000000000.1
536128843.0
221295029.0
H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 12
y considerando v =
010
se obtiene α1 = 0.295889928, de donde:
x0 = v - α1 φφφφ1 =
−
−
29589.0
84136.0
06548.0
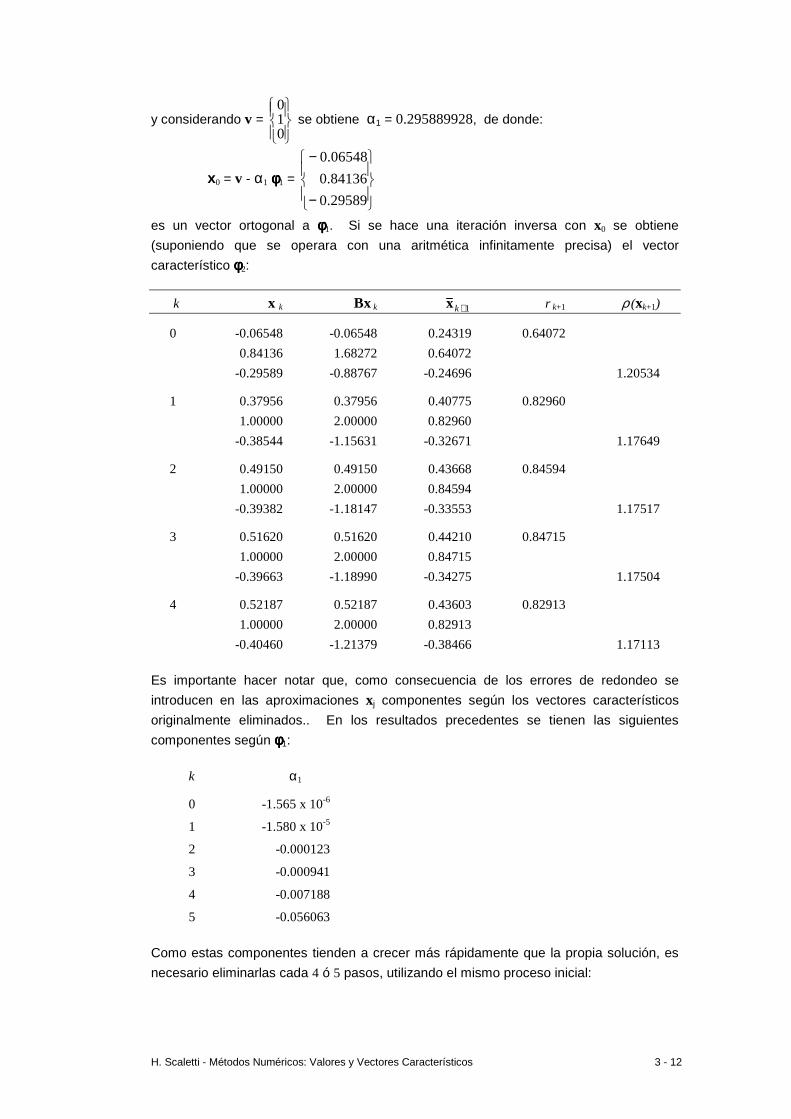
es un vector ortogonal a φφφφ1. Si se hace una iteración inversa con x0 se obtiene
(suponiendo que se operara con una aritmética infinitamente precisa) el vector
característico φφφφ2:
k x k Bx k 1+kx r k+1 ρ (xk+1)
0 -0.06548 -0.06548 0.24319 0.64072
0.84136 1.68272 0.64072
-0.29589 -0.88767 -0.24696 1.20534
1 0.37956 0.37956 0.40775 0.82960
1.00000 2.00000 0.82960
-0.38544 -1.15631 -0.32671 1.17649
2 0.49150 0.49150 0.43668 0.84594
1.00000 2.00000 0.84594
-0.39382 -1.18147 -0.33553 1.17517
3 0.51620 0.51620 0.44210 0.84715
1.00000 2.00000 0.84715
-0.39663 -1.18990 -0.34275 1.17504
4 0.52187 0.52187 0.43603 0.82913
1.00000 2.00000 0.82913
-0.40460 -1.21379 -0.38466 1.17113
Es importante hacer notar que, como consecuencia de los errores de redondeo se
introducen en las aproximaciones xj componentes según los vectores característicos
originalmente eliminados.. En los resultados precedentes se tienen las siguientes
componentes según φφφφ1:
k α1
0 -1.565 x 10-6
1 -1.580 x 10-5
2 -0.000123
3 -0.000941
4 -0.007188
5 -0.056063
Como estas componentes tienden a crecer más rápidamente que la propia solución, es
necesario eliminarlas cada 4 ó 5 pasos, utilizando el mismo proceso inicial:

H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 13
xj = v - ∑−
=
α1
1
j
i
i φφφφi (3.25)
Para el caso del ejemplo:
( )
−=
−−
−=
40787.0
03006.1
53829.0
000000000.1
536128843.0
221295029.0
056093.0
46393.0
00000.1
52588.0
0x
y luego de escalar este vector:
k x k Bx k x k+1 r k+1 ρ (xk+1)
5 0.52258 0.52258 0.44489 0.85094
1.00000 2.00000 0.85094
-0.39597 -1.18790 -0.33696 1.17511
6 0.52282 0.52282 0.44496 0.85098
1.00000 2.00000 0.85098
-0.39599 -1.18796 -0.33698 1.17511
7 0.52288
1.00000
-0.39599
se obtienen: 17511.185098.0
12 ==λ y φφφφ2 =
− 39599.000000.152288.0
3.2.5 Deflación
Otra alternativa es hacer una deflación, obteniendo un nuevo sistema φλ=φ BA~~
, de
orden menor, con los mismos valores característicos del problema original, excepto los
previamente determinados. En lo que sigue se aplica esta idea a un problema de la
forma clásica φφφφφφφφ λ=H .
Considérese una matriz ortogonal, P , cuya última columna es igual al vector
característico 1φ previamente determinado:
( )1121 φ= −npppP L (3.26)
Al hacer el cambio de variable zP=φ se obtiene zPzPH λ= y premultiplicando por TP : ( ) zzPHP λ=T . Sin embargo, al ser la última columna de P igual a 1φ y
suponiendo que ese vector haya sido normalizado de modo que 111 =φφT se tiene:
λ=
1
~
0
0HPHPT (3.27)
Esta matriz tiene los mismos valores característicos que la matriz original, H . Lo mismo
se puede decir de H~
, excepto por 1λ .
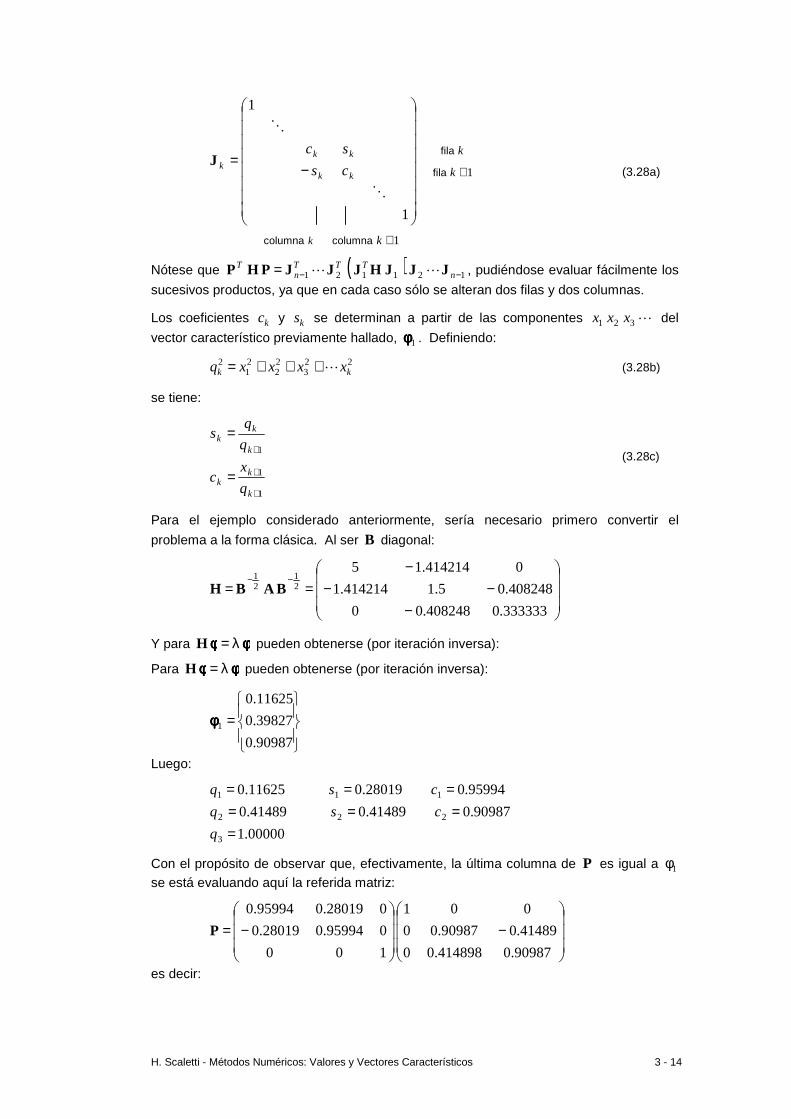
Hay múltiples posibilidades para formar P . En el proceso propuesto por Rutishauser se
hacen las operaciones equivalentes a trabajar con 121 −= nJJJP L , donde:
H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 14
1
1
1
1
+
+
−=
k
k
k
k
kk
kkk cs
sc
columnacolumna
fila
fila
O
O
J (3.28a)
Nótese que ( ) 121121 −−= nTTT
nT JJJHJJJPHP LL , pudiéndose evaluar fácilmente los
sucesivos productos, ya que en cada caso sólo se alteran dos filas y dos columnas.
Los coeficientes kc y ks se determinan a partir de las componentes L321 xxx del
vector característico previamente hallado, 1φφφφ . Definiendo:
223
22
21
2kk xxxxq L+++= (3.28b)
se tiene:
1
1
1
+
+
+
=
=
k
kk
k
kk
q
xc
q
qs
(3.28c)
Para el ejemplo considerado anteriormente, sería necesario primero convertir el
problema a la forma clásica. Al ser B diagonal:
−−−
−==
−−
333333.0408248.00
408248.05.1414214.1
0414214.1521
21
BABH
Y para φφφφφφφφ λ=H pueden obtenerse (por iteración inversa):
Para φφφφφφφφ λ=H pueden obtenerse (por iteración inversa):
=90987.0
39827.0
11625.0
1φφφφ
Luego:
00000.1
90987.041489.041489.0
95994.028019.011625.0
3
222
111
====
===
q
csq
csq
Con el propósito de observar que, efectivamente, la última columna de P es igual a 1φ se está evaluando aquí la referida matriz:
−
−=90987.0414898.00
41489.090987.00
001
100
095994.028019.0
028019.095994.0
P
es decir:

H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 15
−−=
90987.041489.00
39827.087342.028019.0
11625.025494.095994.0
P
de donde:
−−
=15462.000
019271.127561.0
027561.048594.5
PHPT
Nótese el 1λ en la esquina inferior derecha. Los valores característicos de
−−
=19271.127561.0
27561.048594.5~H son 1751.12 =λ y 5036.53 =λ , es decir, iguales a los
restantes valores característicos del problema original. Los correspondientes vectores resultan:
=9980.0
0638.02z y
−=
0638.0
9980.03z
de donde:
=−
021
kk
zPBφφφφ
El factor 21−
B se requiere para obtener los vectores del problema general en su forma
original.
3.3 Métodos de Transformación
Los métodos de este grupo son eficientes sólo si se requieren todos o una alta
proporción de los valores y vectores característicos. La idea básica de estos procesos
consiste en hacer un cambio de variables:
φ φ φ φ = P z (3.29a)
para transformar A φ φ φ φ = λ B φφφφ en:
( P-1A P ) z = λ ( P-1B P ) z (3.29b)
Este sistema tiene los mismos valores característicos que el sistema original y vectores
propios relacionados por (3.29a). Si las transformaciones son tales que las nuevas
matrices tienen valores y vectores característicos fáciles de determinar, se ha resuelto
indirectamente el problema original.
3.3.1 Método de Jacobi
El método de Jacobi (1846) puede considerarse como prototipo de los métodos de
transformación. En este procedimiento se transforma el problema original a uno de la
forma:
λ=
nnnn z
zz
b
bb
z
zz
a
aa
MOMO2
1
2
1
2
1
2
1
(3.30)

H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 16
que tiene como vectores característicos las columnas de la matriz identidad y como
valores característicos los iii ba=λ . Los valores característicos del sistema original
son los mismos. P es en este caso una matriz ortogonal:
P-1 = PT (3.31)
cuyas columnas son la propia solución buscada. Ésta se determina mediante un
proceso iterativo que se describe a continuación.
En la forma que aquí se presenta, este método se aplica a problemas de la forma
clásica, A φ φ φ φ = λ φ φ φ φ, siendo A una matriz simétrica (real). Más adelante se consideran las
modificaciones requeridas para problemas de la forma general.
Empezando con A(0) = A y llamando φφφφ(0) a los vectores característicos del problema
original, el paso k del proceso se define como:
φφφφ(k) = Pk φφφφ(k+1) (3.32a)
A(k) ( Pk φφφφ(k+1) ) = λ ( Pk φφφφ(k+1) )
y si P es una matriz ortogonal, premultiplicando por PT se obtiene:
( PkTA(k) Pk ) φφφφ(k+1) = λ φφφφ(k+1)
Lo que equivale a considerar un problema similar al original:
A(k+1) φφφφ(k+1) = λ φφφφ(k+1) (3.32b)
Siendo:
A(k+1) = PkTA(k) Pk (3.32c)
Nótese que se mantiene la simetría de la matriz. Los valores característicos de esta
nueva matriz son los mismos de la matriz original; los correspondientes vectores se
relacionan por expresiones de la forma (3.32a).
En el método de Jacobi las matrices Pk corresponden a una rotación plana:
jfila
ifila
jcolicol
kk
kkk
θθθ−θ=
1
cossen
sencos
1
O
O
P (3.33)
El objetivo de un paso es hacer cero un coeficiente aij = aji. Puede verificarse
fácilmente que:
( ) ( ) 0sencossencos 22)(11 =θ−θ+θθ−== ++kk
kijkk
(k)ii
(k)jj
)(kji
)(kij aaaaa
(3.34a)
y por tanto:
40
22tg
)()(
)( π≤θ≤
−=θ kk
jjk
ii
kij
kaa
a (3.34b)
Sólo los elementos de dos filas y de dos columnas ( )ji, se alteran en cada paso.
Además, como se mantiene la simetría de la matriz A sólo deben calcularse los

H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 17
coeficientes de la submatriz triangular superior (o inferior) de A(k+1). Con la notación
c = cos θ k; s = sen θ k:
( ) ( ) 0c
2
2
22)(11
2)()(2)(1
221
=−+−==
+=
++=
++
+
+
sacsaaaa
cacsa-sa a
sacsac aa
kij
(k)ii
(k)jj
)(kji
)(kij
kjj
kij
kii
)(kjj
(k)jj
(k)ij
(k)ii
)(kii
(3.35a)
casaaa
sacaaa
kjr
(k)ir
)(krj
)(kjr
kjr
(k)ir
)(kri
)(kir
)(11
)(11
+−==
+==++
++
(3.35b)
En un cierto paso se hacen cero los elementos aij y aji. Sin embargo, las sucesivas
rotaciones reintroducen valores significativos en estas posiciones, por lo que es
necesario repetir el proceso en varios "ciclos" para todos los elementos de fuera de la
diagonal principal. El proceso es convergente. Si en un ciclo dado los cocientes
[ ])()(
2)(
kjj
kii
kij
ijaa
a=γ (3.36)
son de orden ε, éstos se reducen a orden ε2 en el siguiente ciclo.
El número de ciclos completos necesarios para que la matriz A sea suficientemente
aproximada a una matriz diagonal depende del orden de la matriz. Para matrices de
orden 50 ó 60 pueden ser necesarios 8 a 10 ciclos. Cada ciclo demanda O(2n3)
operaciones.
Desde un punto de vista teórico sería más eficiente hacer cero los elementos aij en
orden decreciente de los ijγ , definidos por (3.36), pero las comparaciones necesarias
son relativamente lentas. Por eso se prefiere seguir un orden fijo en la selección de los
elementos y efectuar las rotaciones sólo si ijγ es mayor que una tolerancia, variable en
función del número de ciclo, m (por ejemplo 10-2m). La convergencia del proceso se
puede verificar con una medida similar.
Para determinar los vectores característicos es suficiente efectuar el producto de las
matrices Pk ya que:
φφφφ(k) = Pk φφφφ(k+1) (3.37a)
y por lo tanto:
φφφφ = φ φ φ φ(0) = P1 P2 P3 ... Pm (3.37b)
Para ilustrar el método de Jacobi considérese el problema A φ φ φ φ = λ φ φ φ φ con:
−−
=
4310
363-1
13-63-
013-2
)0(A
En el primer paso se hacen cero los coeficientes a12 y a21. En las expresiones
precedentes:
362 )0(21
)0(12
)0(22
)0(11 −==== aaaa

H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 18
( ) ( )471858.0sen881675.0cos5.1
62
322tg =θ=θ⇒=
−−
=θ
=
1000
0100
0088167504718580
0047185808816750
1
..
.-.
P
==
4388167504718580
361168835338990
88167501168836055570
4718580533899003944490
1(0)T
1)1(
-..
-.-.-
..-.
..-.
PAPA
Luego se hacen cero los coeficientes a31:
533899.06394449.0 )1(31
)1(13
)1(33
)1(11 −==== aaaa
093978.0sen995574.0cos =θ=θ
=
1000
00.99557400.0939783
0010
00.0939783-00.995574
2P
==
403107388167501878350
031073050461030930
88167501030936055572929190
1878350029291903440510
2(1)T
2)2(
.-..
.-..-
..-..-
..-.
PAPA
Nótese que se tienen nuevamente valores significativos en las posiciones 12 y 21. Por
otro lado:
=
1000
00.99557400.0939783
00.0443444-0.8816750.469770
00.0828582-0.471858-0.877773
21PP
Procediendo en forma similar:
10309.30504.660555.7 )2(32
)2(23
)2(33
)2(22 −==== aaaa
615196.0sen788374.0cos =θ=θ
==
41.84721-2.559790.187835
1.84721-3.6289500.180203-
2.55979010.0270.23093-
0.1878350.180203-0.23093-0.344051
3(2)T
3)3( PAPA
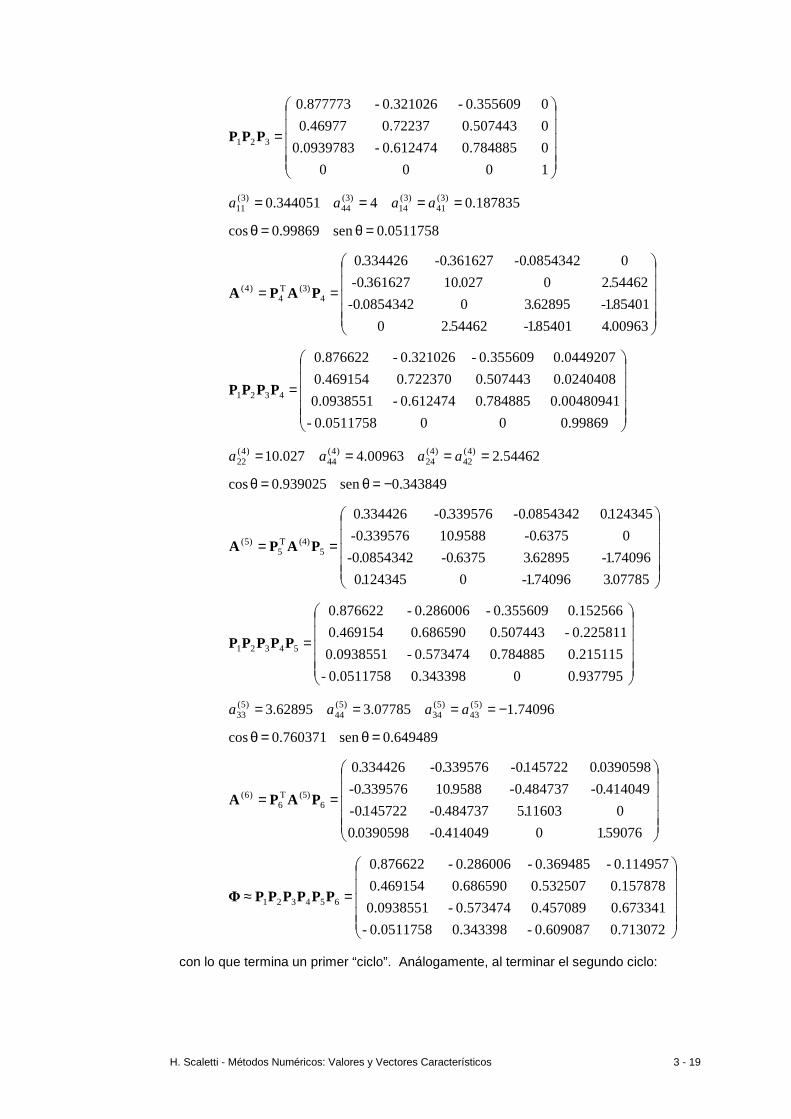
H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 19
=
1000
00.7848850.612474-0.0939783
00.5074430.722370.46977
00.355609-0.321026-0.877773
321 PPP
187835.04344051.0 )3(41
)3(14
)3(44
)3(11 ==== aaaa
0511758.0sen99869.0cos =θ=θ
==
0096348540115446220
854011628953008543420
5446220027103616270
00854342036162703344260
4(3)T
4)4(
..-.
.-..-
...-
.-.-.
PAPA
=
0.99869000.0511758-
0.004809410.7848850.612474-0.0938551
0.02404080.5074430.7223700.469154
0.04492070.355609-0.321026-0.876622
4321 PPPP
54462.200963.4027.10 )4(42
)4(24
)4(44
)4(22 ==== aaaa
343849.0sen939025.0cos −=θ=θ
==
07785374096101243450
7409616289536375008543420
0637509588103395760
12434500854342033957603344260
5(4)T
5)5(
..-.
.-..-.-
.-..-
..-.-.
PAPA
=
0.93779500.3433980.0511758-
0.2151150.7848850.573474-0.0938551
0.225811-0.5074430.6865900.469154
0.1525660.355609-0.286006-0.876622
54321 PPPPP
74096.107785.362895.3 )5(43
)5(34
)5(44
)5(33 −==== aaaa
649489.0sen760371.0cos =θ=θ
==
5907610414049003905980
011603548473701457220
414049048473709588103395760
03905980145722033957603344260
6(5)T
6)6(
..-.
..-.-
.-.-..-
..-.-.
PAPA
=≈
0.7130720.609087-0.3433980.0511758-
0.6733410.4570890.573474-0.0938551
0.1578780.5325070.6865900.469154
0.114957-0.369485-0.286006-0.876622
654321 PPPPPPΦ
con lo que termina un primer “ciclo”. Análogamente, al terminar el segundo ciclo:

H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 20
=
1.5727900.00001490.0003418-
05.082720.00151550.0006033-
0.00001490.001515511.02680.007656-
0.0003418-0.0006033-0.007656-0.317649
)12(A
=≈
0.7225180.584532-0.3614670.0750522-
0.6515780.3996230.640155-0.0771368
0.2010620.5665800.6192080.505117
0.11397-0.421440-0.275908-0.856314
1221 PPPΦ L
y al finalizar el tercer ciclo:
=
1.57279
5.08272
11.0269
0.317644
)18(A
No se muestran los coeficientes con valor absoluto menor que 10-6. Los coeficientes
de la diagonal de A(18) son (aproximaciones a) los valores característicos de la matriz
A. Nótese que no se obtienen en orden ascendente o descendente. Las columnas del
producto 1821 PPP L son los correspondientes vectores, que se obtienen normalizados:
ΦΦΦΦT ΦΦΦΦ = I. Esto se comprueba fácilmente, ya que las matrices kP son todas
ortogonales.
=≈
0.7225370.584614-0.3613730.074671-
0.6515580.3997770.640107-0.076907
0.2009230.5663580.6189910.505686
0.114202-0.421478-0.276628-0.856032
1821 PPPΦ L
3.3.2 Caso de Matrices Hermitianas.
El método de Jacobi puede también emplearse para hallar los valores y vectores
característicos de una matriz Hermitiana, H , cuyos coeficientes (en general complejos)
tienen simetría conjugada. En este caso se hacen productos de la forma:
kk
kk UHUH )(*)1( =+ (3.38)
en los que kU es una matriz unitaria, es decir, tal que *1kk UU =− (el superíndice *
denota en este caso la conjugada traspuesta). Para hacer cero el coeficiente ijh se
utiliza:
jfila
ifila
jcolicol
i
ik
e
e
φφφ−φ=
θ
θ
1
cossen
sencos
1
O
O
U (3.39)
Suponiendo que:

H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 21
icbh
ahk
ji
kii
+=
=)(
)(
dh
icbh
kjj
kij
=
−=)(
)(
(3.40a)
Las partes real e imaginaria de los nuevos coeficientes ( )ji, resultan:
( )( ) 02cossen2sensencossensencos
02sensen2cossencoscossencos222
222
=θφ−θφ−φ+θφφ−
=θφ−θφ−φ+θφφ−
ccbda
cbbad
de donde:
( )da
cbb
c
−θ+θ
=φ
=θ
sencos22tan
tan (3.40b)
3.3.3 Método de Jacobi Generalizado.
Es posible modificar el método de Jacobi "clásico" antes descrito para resolver
directamente el problema general A φ φ φ φ = λ B φφφφ.
En lo que sigue se supone que A y B son simétricas y que esta última es definida
positiva (y posiblemente no diagonal). Debe anotarse que si B fuera diagonal sería
más eficiente transformar el problema a la forma clásica.
Un paso del proceso general se define por:
A(k+1) = PkTA(k) Pk (3.41)
B(k+1) = PkTB(k) Pk
donde Pk es una matriz similar a la utilizada para el proceso clásico:
jfila
ifila
jcolicol
k
kk
γα=
1
1
1
1
O
O
P (3.42)
α y γ se determinan de:
( ) 01 )(11 =γ+γα++α== ++ (k)jjk
kijkk
(k)iik
)(kji
)(kij aaaaa
( ) 01 )(11 =γ+γα++α== ++ (k)jjk
kijkk
(k)iik
)(kji
)(kij bbbbb (3.43)
Estas dos ecuaciones son independientes, excepto en el caso en que
(k)jj
(k)jj
(k)ij
(k)ij
(k)ii
(k)ii
b
a
b
a
b
a== (3.44a)
en el que puede considerase, por ejemplo:
(k)jj
(k)ij
kka
a=γ=α 0 (3.44b)
Definiendo:

H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 22
( ))()()()(21
3
)()()()(2
)()()()(1
kjj
kii
kjj
kii
kij
kii
kij
kii
kij
kjj
kij
kjj
abbac
abbac
abbac
−=
−=
−=
(3.45a)
212333 )( ccccsignocd ++=
se obtienen:
d
c
d
ckk
12 =α−=γ (3.45b)
El radical en la expresión de d es siempre positivo si B es una matriz definida positiva.
Puede observarse que si B fuera la matriz identidad se obtendrían: θ−=γ−=α tgkk .
Los comentarios precedentes relativos a la convergencia son también aquí aplicables.
El número de operaciones en cada ciclo es de O(3n3).
El siguiente ejemplo ilustra los aspectos nuevos introducidos en esta sección. Se
pretende determinar los valores y vectores característicos del sistema: A φ φ φ φ = λ B φφφφ,
donde:
−−
=11
11A
=
21
12B
Para estas pequeñas matrices con un paso es suficiente:
i=1, j=2
a11 = 1 a22 = 1 a12 = a21 = -1
b11 = 2 b22 = 2 b12 = b21 = 1
c1 = 3 c2 = 3 c3 = 0
d=3 α = -γk =1
A(1) = P1TA(0) P1 =
=
−
−−
−00
04
11
11
11
11
11
11
B(1) = P1TB(0) P1 =
=
−
−60
02
11
11
21
12
11
11
de donde:
λ2 = 4/2 = 2
λ1 = 0/6 = 0
ΦΦΦΦ = P1 diag (bi-½) =
−=
− 4082.07071.0
4082.07071.0
610
021
11
11
La post multiplicación de P1 sólo es necesaria para escalar los vectores de modo que
ijjTi δ=φφφφφφφφ B . Al igual que en el procedimiento clásico los valores característicos (y los
correspondientes vectores) no quedan necesariamente ordenados.
3.3.4 El Método QR
Este proceso se aplica al problema clásico A φφφφ = λ φφφφ, donde A no requiere ser
simétrica, pudiendo tener valores característicos cero (o incluso negativos). En el caso
H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 23
más general, para una matriz A cualquiera, el método QR es poco eficiente, ya que
requiere O( 34 n3) operaciones por paso. Sin embargo, sólo se requieren O(4n2)
operaciones por paso si A es de la forma Hessemberg:
=
OL
K
5554
454443
35343332
2524232221
1514131211
000
00
0
aa
aaa
aaaa
aaaaa
aaaaa
A (3.46)
es decir si es casi triangular superior, excepto por una codiagonal inferior. Para el caso
particular en que la matriz A es además simétrica (y por lo tanto tridiagonal):
=
OO
O43
332
221
11
ab
bab
bab
ba
A (3.47)
el método QR es aún más eficiente, requiriendo tan solo O(12n) por paso.
En todo caso es siempre posible efectuar la transformación a la forma Hessemberg
(tridiagonal si A y B son simétricas), requiriéndose un total de O( 35 n3) operaciones
(una sola vez).
Debe anotarse además que, a diferencia del método de Jacobi, el método QR mantiene
la posible configuración banda de la matriz y permite efectuar traslaciones (análogas a
las de una iteración inversa), tanto para acelerar la convergencia como para mejorar la
precisión en los valores característicos de interés. El objetivo del proceso conocido
como QR es la determinación de los valores característicos; conocidos estos, los
correspondientes vectores pueden obtenerse por iteración inversa con traslación.
Considerando A(0) = A, el paso básico del método QR consiste en hacer la
descomposición:
kkk RQA =)( (3.48a)
donde kQ es una matriz ortogonal (es decir, IQQ =kTk ) y kR es una matriz triangular
superior. Luego se efectúa el producto en orden cambiado:
kkk QRA =+ )1( (3.48b)
Obsérvese que premultiplicando (3.48a) por TkQ se obtiene:
kkT
k RAQ =)( (3.48c)
y por lo tanto:
kkT
kkkk QAQQRA )()1( ==+ (3.48d)

H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 24
Nótese que si )(kA es simétrica )1( +kA también resulta simétrica. La expresión (3.48d)
indica además que )1( +kA es "similar" a )(kA : sus valores característicos son los
mismos, los correspondientes vectores se relacionan por una transformación lineal:
)()()( kkk φφφφφφφφ λ=A (3.49a)
al efectuar el cambio de variables:
)1()( += kk
k φφφφφφφφ Q (3.49b)
se obtiene:
)1()1()( ++ λ= kk
kk
k φφφφφφφφ QQA (3.49c)
( ) )1()1()( ++ λ= kkk
kTk φφφφφφφφQAQ (3.49d)
Ambas matrices tienen los mismos valores característicos (que en consecuencia son
los de la matriz original) y vectores característicos relacionados por (3.49b).
A medida que k crece )(kA converge a una matriz triangular superior (cuyos valores
característicos son los elementos de la diagonal principal); para el caso simétrico )(kA
converge a una matriz diagonal. Los valores característicos se obtienen en orden
descendente; así la aproximación al valor característico de menor módulo se obtiene en
la posición nn de la matriz.
La convergencia del proceso es análoga a la de la iteración inversa. Cuando en pasos
sucesivos se obtienen valores similares en el extremo inferior de la diagonal principal,
puede afirmarse que se tiene una aproximación al primer valor característico. La
convergencia puede acelerarse efectuando traslaciones:
)(knnk a=µ (3.50a)
IQRA kkkk µ−=+ )1( (3.50b)
Nótese que los valores característicos de esta nueva matriz son iguales a los de la
matriz original menos la translación. Cuando se logra que 0)( =knna puede hacerse una
traslación:
)(1,1
knnk a −−=µ (3.50c)
para mejorar la convergencia al segundo valor característico y análogamente se
procede para los otros valores requeridos. Por regla general se requieren sólo 2 pasos
por cada valor característico adicional. Al finalizar el proceso debe agregarse a los
valores λ obtenidos la suma de las traslaciones kµ efectuadas.
Los vectores característicos podrían obtenerse con el producto:
L321)0( QQQ=φφφφ (3.51)
pero este proceso es poco eficiente, siendo más conveniente obtener estos vectores
por iteraciones inversas con traslaciones iguales a los valores característicos ya
determinados. Esto permite también mejorar la precisión en los λ .
La determinación de Q y R en un paso puede hacerse en diversas formas. El proceso
más eficiente consiste en transformar A en una matriz triangular superior utilizando
matrices de rotación plana (como en el método de Jacobi):

H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 25
( ) RAPPP =−TTT
nn 21311, L (3.52a)
y por lo tanto:
1,3121 −= nnPPPQ L (3.52b)
La matriz jiP , que permite hacer cero el coeficiente ji:
jfila
ifila
jcolicol
kk
kkk
θθθ−θ=
1
cossen
sencos
1
O
O
P (3.53a)
se obtiene mediante:
d
a kii
)(
cos =θ
d
a kji
)(
sen =θ (3.53b)
( ) ( )2)(2)( kii
kji aad +=
Sólo se requiere un ciclo de estas transformaciones para obtener R. No es necesario
iterar.
Para un ejemplo del proceso considérese la matriz:
=210
141
012)0(A
Esta es una matriz simétrica (lo cual no es un requisito para emplear el método QR) y,
siendo tridiagonal, tiene la “forma Hessemberg”.
Para transformar A en una matriz triangular superior R se hace primero cero el
coeficiente a21:
0.447214 sen0.894427cos
2.23606812 )0(21
011
=θ=θ=== daa )(
100
0.894427.447214
0.447214-.894427
21
=P
=210
.8944273.1304940
0.4472142.6832812.236068
)0(T21AP
Luego se hace cero a32, con lo que se obtiene una matriz triangular superior:
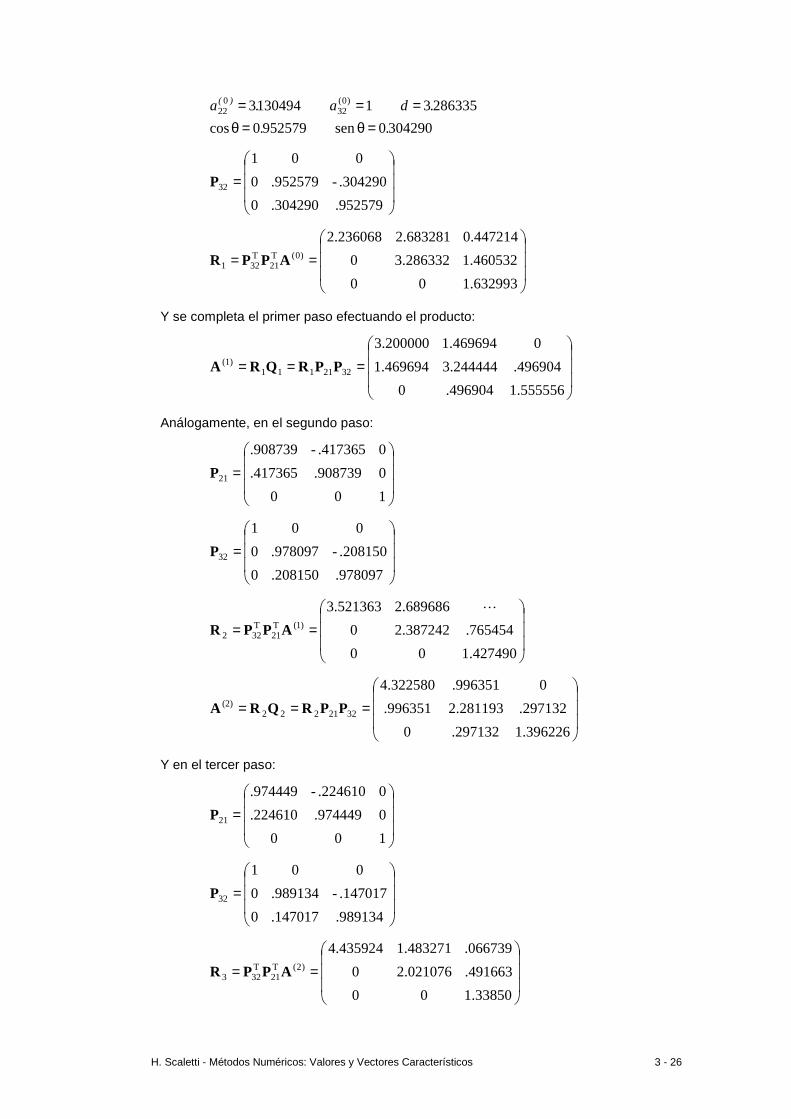
H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 26
3042900sen9525790cos
286335311304943 )0(32
022
..
.da.a )(
=θ=θ===
.952579.3042900
.304290-.9525790
001
32
=P
==1.63299300
1.4605323.2863320
0.4472142.6832812.236068
)0(T21
T321 APPR
Y se completa el primer paso efectuando el producto:
===1.555556.4969040
.4969043.2444441.469694
01.4696943.200000
3221111(1) PPRQRA
Análogamente, en el segundo paso:
=100
0.908739.417365
0.417365-.908739
21P
=.978097.2081500
.208150-.9780970
001
32P
==1.42749000
.7654542.3872420
2.6896863.521363
)1(T21
T322
L
APPR
===1.396226.2971320
.2971322.281193.996351
0.9963514.322580
3221222(2) PPRQRA
Y en el tercer paso:
=100
0.974449.224610
0.224610-.974449
21P
=.989134.1470170
.147017-.9891340
001
32P
==1.3385000
.4916632.0210760
.0667391.4832714.435924
)2(T21
T323 APPR

H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 27
===1.323944.1967800
.1967802.020318.453953
0.4539534.655737
3221333(3) PPRQRA
Suponiendo que el coeficiente 323944.1)3(33 =a sea una buena aproximación al primer
valor característico, se efectúa una traslación:
=−0.1967800
.196780.696375.453953
0.4539533.331794
323944.1(3) IA
obteniéndose en el cuarto paso:
=.055581-.017396-0
.017396-.678541.088938
0.0889383.405209(4)A
Se hace entonces una nueva traslación:
1.268362-.055581 k4 =µ=µ⇒=µ ∑
obteniéndose:
=.000413-.0000100
.000010.731767.018800
0.0188003.463559(5)A
y nuevamente:
1.267949-.000413 k5 =µ=µ⇒=µ ∑
obteniéndose:
=000
0.732056.003973
0.0039733.464096(6)A
Se observa ahora que el coeficiente a33 es menor que 10-6, lo que implica que λ1 es
aproximadamente igual a la suma de las traslaciones previamente realizadas.
Conviene luego hacer una traslación igual al resultado obtenido para a22 a fin de
mejorar la precisión para el segundo valor característico:
2.732051 k6 =µ=µ⇒=µ ∑
=−.732051-00
00.003973
0.0039732.732050
732051.0(6) IA
Y puede trabajarse con la submatriz de un orden menor:
=
0.003973
.0039732.732050(6)A
H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 28
0.000307sen1cos
2.7320510.0039732.732050 )6(21
611
=θ=θ=== daa )(
==
1.000000.000307
.000307-1.000000721 QP
−==
000001.0
.0008402.732051)6(217 APR T
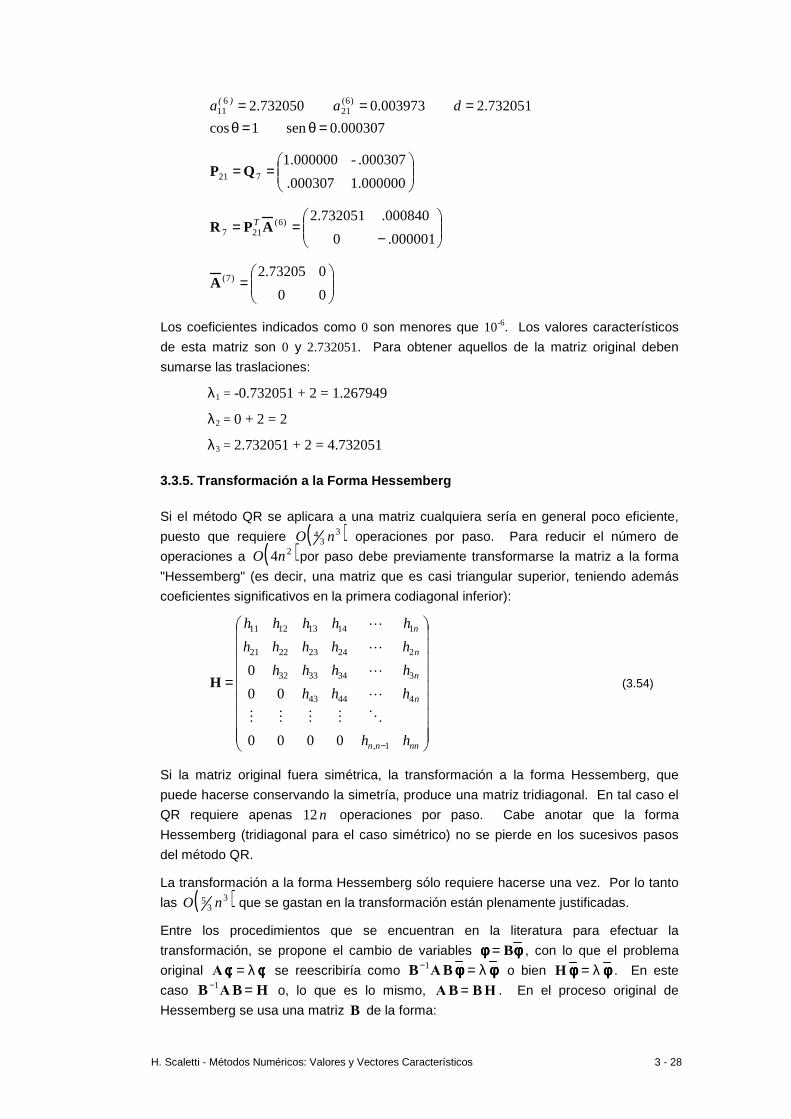
=
00
073205.2)7(A
Los coeficientes indicados como 0 son menores que 10-6. Los valores característicos
de esta matriz son 0 y 2.732051. Para obtener aquellos de la matriz original deben
sumarse las traslaciones:
λ1 = -0.732051 + 2 = 1.267949
λ2 = 0 + 2 = 2
λ3 = 2.732051 + 2 = 4.732051
3.3.5. Transformación a la Forma Hessemberg
Si el método QR se aplicara a una matriz cualquiera sería en general poco eficiente,
puesto que requiere ( )33
4 nO operaciones por paso. Para reducir el número de
operaciones a ( )24nO por paso debe previamente transformarse la matriz a la forma
"Hessemberg" (es decir, una matriz que es casi triangular superior, teniendo además
coeficientes significativos en la primera codiagonal inferior):
=
− nnnn
n
n
n
n
hh
hhh
hhhh
hhhhh
hhhhh
1,
44443
3343332
224232221
114131211
0000
00
0
OMMMM
L
L
L
L
H (3.54)
Si la matriz original fuera simétrica, la transformación a la forma Hessemberg, que
puede hacerse conservando la simetría, produce una matriz tridiagonal. En tal caso el
QR requiere apenas n12 operaciones por paso. Cabe anotar que la forma
Hessemberg (tridiagonal para el caso simétrico) no se pierde en los sucesivos pasos
del método QR.
La transformación a la forma Hessemberg sólo requiere hacerse una vez. Por lo tanto
las ( )33
5 nO que se gastan en la transformación están plenamente justificadas.
Entre los procedimientos que se encuentran en la literatura para efectuar la
transformación, se propone el cambio de variables φφφφφφφφ B= , con lo que el problema
original φφφφφφφφ λ=Α se reescribiría como φφφφφφφφ λ=− BΑB 1 o bien φφφφφφφφ λ=H . En este
caso HBΑB =−1 o, lo que es lo mismo, HBBΑ = . En el proceso original de
Hessemberg se usa una matriz B de la forma:
H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 29
=
10
010
0010
00010
00001
432
4342
32
L
M
L
L
L
L
nnn bbb
bb
bB (3.55a)
con coeficientes arbitrarios en la primera columna (que por simplicidad se ha escrito
como la primera columna de la matriz identidad). Los coeficientes de las sucesivas
filas de H y columnas de B pueden entonces obtenerse con las expresiones:
∑ ∑+= =
−+=n
rk
r
k
krikkrikirir hbbaah1 1
1,2,1 += ri L (3.55b)
−+= ∑ ∑
+= =++
n
rk
r
k
krikkrikirrr
ri hbbaah
b1 1,1
1,
1 nri L,2+= (3.55c)
Este procedimiento podría fallar si en algún paso 0,1 =+ rrh . El proceso podría
recomenzarse con una primera columna de B diferente, lo que en general evitaría el
error, aunque esto no puede garantizarse. Por otro lado, el procedimiento antes
expuesto no mantiene la posible simetría de la matriz A .
También puede hacerse la transformación a la forma Hessemberg por rotaciones
planas (método de Givens) o reflexiones (Householder). El método de Householder
utiliza matrices ortogonales y simétricas, de la forma:
TwwIP 2−= (3.56)
donde w es un vector unitario: 1=wwT . Es fácil probar que 1−== PPP T .
La matriz P refleja al espacio en el "plano" que pasa por el orígen y es ortogonal a w .
Considérese un vector cualquiera uwv 10 α+α= donde 0=wuT . Entonces,
( )( ) uwuwwwIvP 10102 α+α−=α+α−= T . Nótese que la componente según w
ha cambiado de signo, es decir, el vector v ha sido reflejado en el plano ortogonal a
w .
La transformación de A en H mediante el método de Householder requiere 2−n
pasos ( n es aquí el orden del sistema) de la forma:
kk
kk PAPA )()1( =+ (3.57a)
donde:
( ) 1)(,1signo
2
+++=
=θ
θ−=
kkk
kkkk
kTk
k
Tkkkk
a evvw
ww
wwIP
(3.57b)
siendo:

H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 30
=
+
+
)(
)(,2
)(,1
0
0
knk
kkk
kkkk
a
a
a
M
M
v una matriz que contiene los coeficientes de la columna k de
)(kA que están por debajo de la diagonal principal, y
=+
0
1
0
1
M
M
ke
la columna 1+k de la matriz identidad (de orden n).
Para que el proceso sea más eficiente, debe observarse que al premultiplicar A , cuyas
columnas son L321 aaa , por la matriz P , cada columna se modifica en forma
independiente. Las columnas de PAA = resultan:
( ) ( ) kjTkkjj
Tkkkj wawaawwIa θ−=θ−= (3.58a)
Igualmente, al postmultiplicar A por P las filas se modifican en forma independiente.
Llamando ahora ia a la fila i de la matriz PAA = , la correspondiente fila de PAA =
resulta:
( ) ( ) Tkkiki
Tkkkii wwaawwIaa θ−=θ−= (3.58b)
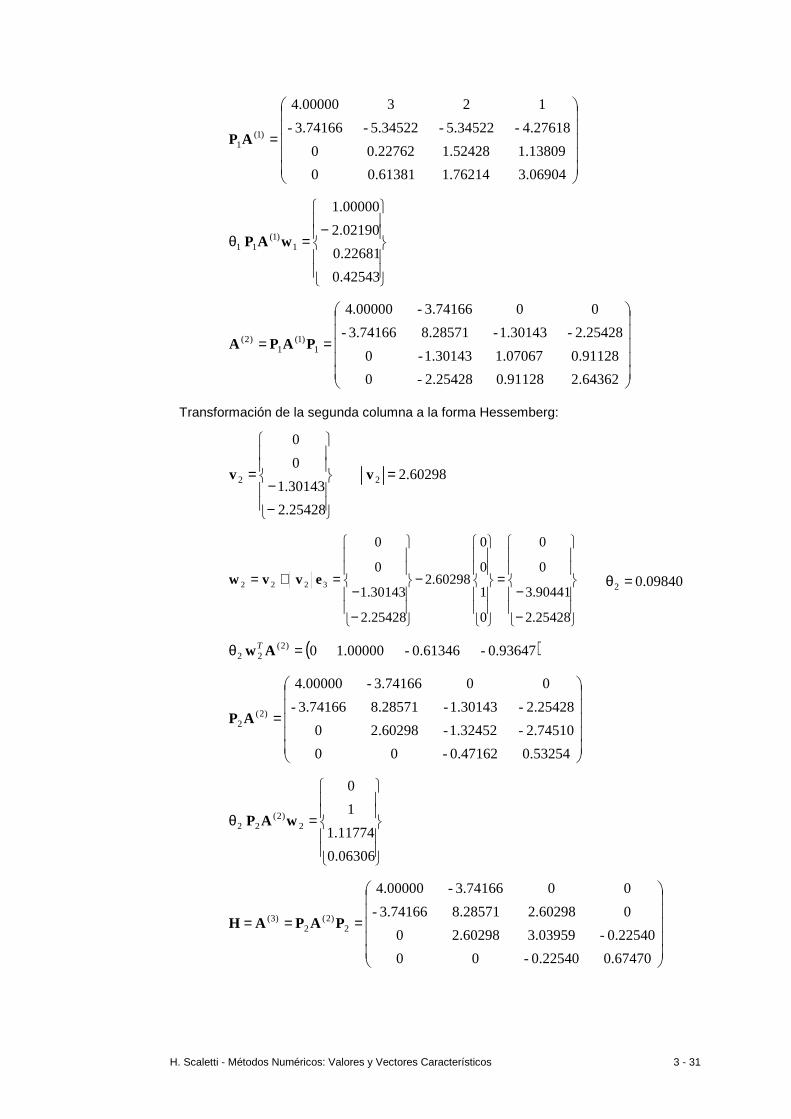
Por ejemplo, considérese la matriz:
)1(
4321
3432
2343
1234
AA =
=
Transformación de la primera columna a la forma Hessemberg:
=
1
2
3
0
1v 74166.31 =v
=
+
=+=
1
2
74166.6
0
0
0
1
0
74166.3
1
2
3
0
2111 evvw 03964.01 =θ
( )93096.023786.138619.100000.1)1(11 =θ AwT
H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 31
=
3.069041.762140.613810
1.138091.524280.227620
4.27618-5.34522-5.34522-3.74166-
12300000.4
)1(1AP
−=θ
42543.0
22681.0
02190.2
00000.1
1)1(
11 wAP
==
2.643620.911282.25428-0
0.911281.070671.30143-0
2.25428-1.30143-8.285713.74166-
003.74166-00000.4
1)1(
1)2( PAPA
Transformación de la segunda columna a la forma Hessemberg:
−−
=
25428.2
30143.1
0
0
2v 60298.22 =v
−
−=
−
−
−=+=
25428.2
90441.3
0
0
0
1
0
0
60298.2
25428.2
30143.1
0
0
3222 evvw 09840.02 =θ
( )0.93647-0.61346-00000.10)2(22 =θ AwT
=
0.532540.47162-00
2.74510-1.32452-2.602980
2.25428-1.30143-8.285713.74166-
003.74166-00000.4
)2(2AP
=θ
0.06306
1.11774
1
0
2)2(
22 wAP
===
0.674700.22540-00
0.22540-3.039592.602980
02.602988.285713.74166-
003.74166-00000.4
2)2(
2)3( PAPAH

H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 32
3.4 Métodos Mixtos
Los dos procesos que se describen en lo que sigue son adecuados para sistemas de
orden grande en el caso en que se requieran muchos vectores característicos.
3.4.1 Iteración con la Determinante de (A - µ B)
Los valores propios de φφφφφφφφ BA λ= son los ceros del polinomio característico
( ) ( ) 0det =λ−=λ BAp . Por ejemplo, si:
=
4200
2820
0282
0024
A
=
1000
0200
0020
0001
B
Las raíces del polinomio:
( )
0720864364644
4200
22820
02282
0024
det
234 =+λ−λ+λ−λ=
λ−λ−
λ−λ−
=λp
son los valores característicos. La determinación de los coeficientes del polinomio
característico es factible (utilizando, por ejemplo, el método de Hessemberg). Una vez
obtenidos los coeficientes del polinomio característico, se requiere determinar los
valores de λ para los que ( ) 0=λp . Sin embargo, éste es frecuentemente un
problema mal condicionado: pequeños errores en los coeficientes causan grandes
errores en las raíces. Por ello, los métodos en los que se hace una determinación
explícita del polinomio característico sólo son adecuados para pequeñas matrices.
Para matrices de orden elevado, pero con un ancho de banda comparativamente
pequeño, pueden determinarse los valores característicos por iteración, evaluando la
determinante de BA kµ− para una secuencia de valores kµ que se corrigen con
procesos tales como el método de la secante. Así, dadas las aproximaciones 1−µ k y
kµ a una raíz y habiéndose calculado ( ) BA 11 −− µ−=µ kkp y ( ) BA kkp µ−=µ se
obtiene una mejor aproximación, 1+µ k , mediante:
21)()()( 1
11 ≤η≤µ
µ−µµ−µ
η−µ=µ−
−+ k
kk
kkkk p
pp (3.59)
La evaluación de ( )µp no requiere tener el polinomio ( )λp en forma explícita.
Si BA µ− se descompone en el producto de una matriz triangular inferior, L , con
unos en la diagonal principal, por una matriz triangular superior, U , se tiene que:
( ) ( ) ( ) ( ) ( )ULLUBA detdetdetdet ==µ−=µp (3.60a)
donde:
( )( ) L
L
44332211
44332211
det
1det
uuuu
llll
===
U
L (3.60b)
H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 33
y por lo tanto: ( ) nnuuuuup L44332211=µ
La descomposición de BA µ− en factores triangulares LU requiere pocas
operaciones si el ancho de banda es pequeño.
Particularmente importante es el caso en el que las matrices A y B son simétricas y
definidas positivas (todos los valores característicos son reales y positivos). En tal caso
puede aplicarse la propiedad de Sturm: el número de coeficientes negativos en la
diagonal principal de U al hacer la descomposición LUBA =µ− es igual al número
de valores característicos menores que kµ . Esta propiedad, combinada con la
iteración (3.59) u otra similar, permite obtener una primera aproximación a una raíz. Sin
embargo, el proceso debe combinarse con iteraciones inversas usando el cociente de
Rayleigh para refinar los valores obtenidos.
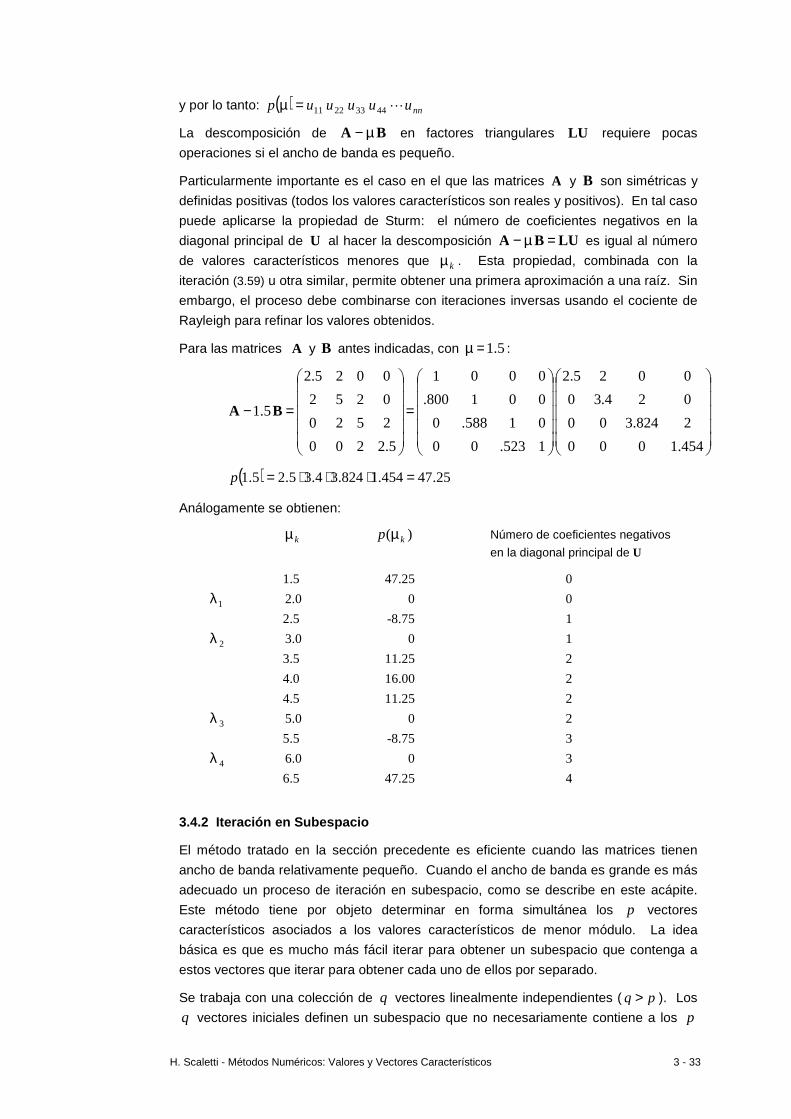
Para las matrices A y B antes indicadas, con 5.1=µ :
=
=−
454.1000
2824.300
024.30
0025.2
1523.00
01588.0
001800.
0001
5.2200
2520
0252
0025.2
5.1 BA
( ) 25.47454.1824.34.35.25.1 =⋅⋅⋅=p
Análogamente se obtienen:
kµ )( kp µ Número de coeficientes negativos
en la diagonal principal de U
1.5 47.25 0
1λ 2.0 0 0
2.5 -8.75 1
2λ 3.0 0 1
3.5 11.25 2
4.0 16.00 2
4.5 11.25 2
3λ 5.0 0 2
5.5 -8.75 3
4λ 6.0 0 3
6.5 47.25 4
3.4.2 Iteración en Subespacio
El método tratado en la sección precedente es eficiente cuando las matrices tienen
ancho de banda relativamente pequeño. Cuando el ancho de banda es grande es más
adecuado un proceso de iteración en subespacio, como se describe en este acápite.
Este método tiene por objeto determinar en forma simultánea los p vectores
característicos asociados a los valores característicos de menor módulo. La idea
básica es que es mucho más fácil iterar para obtener un subespacio que contenga a
estos vectores que iterar para obtener cada uno de ellos por separado.
Se trabaja con una colección de q vectores linealmente independientes ( pq > ). Los
q vectores iniciales definen un subespacio que no necesariamente contiene a los p

H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 34
vectores de interés. Si esos p vectores característicos si estuvieran contenidos en el
subespacio, sería suficiente proyectar φφφφφφφφ BA λ= para obtener el sistema
zBzA λ= , de orden nq << , que sería fácil de resolver por métodos de
transformación. Los valores característicos del problema proyectado serían los mismos
del problema original, mientras que sus vectores característicos, z , corresponderían a
las proyecciones de los vectores φφφφ en el subespacio. No siendo éste el caso, se hacen
iteraciones inversas para mejorar los q vectores con los que se trabaja, de modo que
el subespacio por ellos definido sea más y más “paralelo” a los p vectores propios de
interés.
En lo que sigue, se supone que A y B son matrices simétricas. Siendo kX los q
vectores de aproximación, en cada ciclo del proceso se realizan los pasos siguientes:
a. Iteración inversa:
kk BXXA =+1
La matriz A debe factorizarse antes de iniciar las iteraciones. Los vectores 1+kX
son más “paralelos” a los primeros p vectores característicos.
b. Proyección de A y B en el subespacio definido por los vectores 1+kX :
11)1(
+++ = k
Tk
k XAXA
11)1(
+++ = k
Tk
k XBXB
Las matrices )1( +kA y )1( +kB son cuadradas, simétricas, de orden q .
c. Solución del problema de valores y vectores característicos proyectado:
11)1(
1)1(
+++
++ = kk
kk
k ΛΛΛΛQBQA
1+kΛΛΛΛ es una matriz diagonal, cuyos coeficientes son los valores característicos del
problema proyectado. Si los 1+kX definen un subespacio que contiene a los p
primeros vectores propios, los p menores valores en 1+kΛΛΛΛ son parte de la solución
buscada.
d. Determinación de nuevos vectores:
111 +++ = kkk QXX
Como consecuencia de los pasos c y d:
( ) qkkT
kkkTk
Tkk
Tk ΛΛΛΛ=== +
++++++++ 1
)1(1111111 QAQQXAXQXAX
( ) qkkT
kkkTk
Tkk
Tk IQBQQXBXQXBX === +
++++++++ 1
)1(1111111
es decir, los vectores 1+kX satisfacen las condiciones de ortogonalidad, lo que asegura
que la iteración inversa no produce q vectores todos iguales a 1φφφφ .
Si en las 0X hay componentes según todos los p vectores característicos de interés:
( )LL pk
k λλλ=∞→
21diagLim ΛΛΛΛ
( )LL pk
k φφφφφφφφφφφφ 21diagLim =∞→X
Habiéndose obtenido en dos ciclos sucesivos los estimados )(kpλ y )1( +λ k
p para el mayor
de los valores característicos requeridos, el cociente )1()()1( ++ λλ−λ kp
kp
kp da una
H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 35
medida adecuada del error relativo y es útil para verificar la convergencia.
Adicionalmente, debe comprobarse que los valores y vectores obtenidos corresponden
a los p menores valores característicos. Para ello puede usarse la propiedad de
Sturm, factorizando BA µ− en LU con valores de µ ligeramente mayores a los λ
calculados.
Si A y B son simétricas, de orden n , ancho de semibanda m , y A es definida
positiva, el número de operaciones iniciales requeridas es de ( )221 nmO ,
esencialmente para la factorización de A . En cada ciclo de la iteración, considerando
nq << , deben hacerse ( )( )324 ++ qmnqO operaciones. Esto puede reducirse a
( )( )322 ++ qmnqO cuando B es diagonal. Para el procedimiento como se ha
descrito en los párrafos precedentes, se trabaja con ( )8,2min += ppq .
Habitualmente unos 10 ciclos de iteración son suficientes para obtener 6 cifras
significativas correctas en los p valores y vectores característicos. Las operaciones
finales requieren ( )pnmO 221 operaciones adicionales.
Aproximación Inicial
Para iniciar el proceso se requieren q vectores linealmente independientes, agrupados
en 0X . Si A y B fueran diagonales, los vectores característicos serían las columnas
ke de la matriz identidad. Aún cuando A y B no sean diagonales, éste puede ser un
buen criterio para construir la aproximación inicial 0X . En particular, deberían
escogerse las columnas cuyo índice k corresponde a los máximos kkkk ab . Con el
propósito de introducir componentes según todos los vectores característicos, se
acostumbra además considerar dos columnas con componentes arbitrarios (que
podrían ser todos iguales a 1, o iguales a los kkkk ab ).
En algunas aplicaciones es fácil obtener una buena aproximación al primer vector
característico, por ejemplo, como solución de un sistema de ecuaciones de la forma
bxA =1 . Las sucesivas columnas kx para una excelente aproximación inicial pueden
entonces obtenerse como vectores de Ritz, mediante un proceso recursivo que
combina pasos de iteración inversa con ortogonalización:
1−= kk xByA
j
k
j jTj
jTk
kk xxBx
xByyx ∑
−
=
−=
1
1
Determinación de Grupos de Vectores Característicos Haciendo Traslaciones
Si se requieren muchos vectores característicos, el procedimiento estándar de iteración
en subespacio puede hacerse más eficiente utilizando sucesivas traslaciones en
combinación con procedimientos de eliminación de las componentes según los
vectores ya conocidos.
En este caso se trabaja con subespacios de dimensión q , con el propósito de
determinar grupos de 2qp ≈ vectores. Habitualmente ( )mq ,4máx= , siendo m el
ancho (promedio) de semibanda. Para cada grupo de vectores, se realizan cómputos
iniciales que incluyen:
a. Determinación de la traslación (el proceso se inicia con 0=µ )

H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 36
1
~9.01.0 +λ+λ=µ nn
nλ es el último valor característico para el que se ha logrado convergencia;
1
~+λn es la aproximación al siguiente valor característico.
b. Factorización: ULBA =µ−
c. Determinación de q vectores de aproximación inicial, 0X .
La iteración incluye los pasos siguientes:
a. Eliminación de las componentes de kX según los vectores característicos
previamente determinados (ver acápite 3.2.4).
b. Iteración inversa:
11
1
++
+
==
kk
kk
YZUL
XBY
c. Proyección de BA µ− y B en el subespacio definido por los vectores 1+kY :
11)1(
+++ = k
Tk
k YZA
11)1(
+++ = k
Tk
k ZBZB
Las matrices )1( +kA y )1( +kB son cuadradas, simétricas, de orden q .
d. Solución del problema de valores y vectores característicos proyectado:
( ) 11)1(
1)1()1(
+++
+++ =µ+ kk
kk
kk ΛΛΛΛQBQBA
e. Determinación de nuevos vectores:
111 +++ = kkk QZX
f. Verificación de la convergencia
Como en el procedimiento estándar, debe verificarse que se tienen los valores
característicos correctos utilizando la propiedad de Sturm.
Ejemplo simple
Supóngase que se requieren dos vectores característicos de φφφφφφφφ BA λ= , siendo:
−−−
−−−
=
2100
1210
0121
0012
A
=
2
0
1
0
B
En este caso particular la iteración inversa produce en un solo paso el subespacio que
incluye a los dos primeros vectores característicos, ya que dos de los valores
característicos son infinitos. Para hacer más eficiente el proceso debe factorizarse
primero la matriz A :

H. Scaletti - Métodos Numéricos: Valores y Vectores Característicos 3 - 37
LUA =
−−
−
−−
−=
25.1000
13333.100
015.10
0012
175.000
016667.0
0015.0
0001
Con la aproximación inicial:
=
01
00
10
00
0X
Se obtiene por iteración inversa:
=
02
00
10
00
0XB 01 XBXUL =
=
0.41.6
0.81.2
1.20.8
0.60.4
1X
Proyectando las matrices A y B en el subespacio definido por los vectores 1X :
==
2.18.0
8.02.311
)1( XAXA T
==
76.124.2
24.276.511
)1( XBXB T
se resuelve el problema proyectado (método de Jacobi generalizado):
1.00
50.0-
56.2 d
-0.64 c
56.2 c
28.1 c
3
2
1
=γ=α
−=⇒
===
−=
γα
=11
5.01
1
1P
=
20.10
000.6PAPT
=
96.00
012PBPT
de donde:
=
=
25.10
050.0
0
0
222
1111
ba
baΛΛΛΛ
−=
621020.1675288.0
310510.0675288.0Q
y finalmente se expresan los vectores en el sistema de referencia original:
( )2111
248408.0350577.0
124204.0350577.0
497816.0350577.0
248408.0675288.0
φφφφφφφφ=
−
== QXX



![Valores y Vectores Propios - Universidad de Chile · Valores y vectores propios Semana 11 [14/41] Matrices diagonalizables Matriz diagonalizable A ∈ Mnn(K) es diagonalizable si](https://static.fdocument.org/doc/165x107/5f76542245227e2d707e877a/valores-y-vectores-propios-universidad-de-chile-valores-y-vectores-propios-semana.jpg)