Πίνακας Μετασχηματισμού Laplace
7
ΜΑΘΗΜΑ 03: Ο ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ LAPLACE 03.1 Εισαγωγή Ο μετασχηματισμός Laplace και ο μετασχηματισμός Z είναι δύο πολύ χρήσιμα μαθηματικά εργαλεία για την ανάλυση και σχεδίαση συστημάτων αυτομάτου και ιδιαίτερα ΓΧΑ (Γραμμικών Χρονικά Αναλλοίωτων συστημάτων). Ο μετασχηματισμός Laplace μετασχηματίζει συναρτήσεις από το πεδίο του χρόνου (t) στο πεδίο της μιγαδικής συχνότητας s: Η λογική της χρήσης του μετασχηματισμού Laplace είναι αντίστοιχη με τη λογική της χρήσης του μετασχηματισμού Fourier στα τηλεπικοινωνιακά συστήματα. Η διαφορά έγκειται στο γεγονός ότι με τον μετασχηματισμό Laplace μπορούμε να μελετήσουμε και την συμπεριφορά συστημάτων στη μεταβατική κατάσταση και όχι μόνο στη μόνιμη κατάσταση (για αυτό και χρησιμοποιείται η μιγαδική μεταβλητή s = σ + jω, αντί της φανταστικής μεταβλητής jω του μετασχηματισμού Fourier) Η βασική χρήση του μετασχηματισμού Laplace είναι για τη λύση ολοκληρωδιαφορικών εξισώσεων ΓΧΑ συστημάτων. Μέσω του μετασχηματισμού οι εξισώσεις αυτές μετατρέπονται σε αλγεβρικές των οποίων η επίλυση είναι ευκολότερη. Ο μετασχηματισμός Laplace χρησιμοποιείται όμως και για την μελέτη της ευστάθειας και τη σχεδίαση Σ.Α.Ε (όπως για παράδειγμα με τη μέθοδο του Γεωμετρικού Τόπου Ριζών). 03.2 Ο Μετασχηματισμός Laplace Έστω η πραγματική συνάρτηση f(t) της πραγματικής μεταβλητής t (π.χ χρόνος). Ο μετασχηματισμός Laplace της συνάρτησης f(t) δίνεται από τη σχέση: 0 ) ( ) ( )] ( [ dt e t f s F t f L st (03.1) Ο μετασχηματισμός Laplace της συνάρτησης f(t) υπάρχει εφόσον το ολοκλήρωμα 0 0 ) ( dt e t f I t (03.2) συγκλίνει για κάποιο πραγματικό αριθμό σ 0 , δηλαδή ισχύει Ι <+∞. 03.2.1 Παράδειγμα Ο μετασχηματισμός Laplace της συνάρτησης f(t) =e -t υπάρχει διότι το ολοκλήρωμα I υπάρχει για κάθε σ 0 >-1. 0 0 ) 1 ( 0 0 ) 1 ( 0 1 1 1 1 0 0 0 t t t t e dt e dt e e I (03.3) Επομένως ο μετασχηματισμός Laplace L[f(t)] = F(s) της συνάρτησης f(t) =e -t θα είναι: s e s dt e dt e e s F t s t s st t 1 1 1 1 ) ( 0 ) 1 ( 0 ) 1 ( 0 (03.4) Στο επόμενο σχήμα (Σχήμα 3.1) δίνεται η φιλοσοφία της χρήσης του μετασχηματισμού Laplace στη μελέτη των συστημάτων Σ.Α.Ε. Συγκεκριμένα πολλά ΓΧΑ Σ.Α.Ε περιγράφονται από σχέσεις της μορφής:
description
Πίνακας Μετασχηματισμού Laplace
Transcript of Πίνακας Μετασχηματισμού Laplace

ΜΑΘΗΜΑ 03: Ο ΜΕΤΑΣΧΗΜΑΤΙΣΜΟΣ LAPLACE
03.1 Εισαγωγή
Ο μετασχηματισμός Laplace και ο μετασχηματισμός Z είναι δύο πολύ χρήσιμα μαθηματικά εργαλεία για την ανάλυση και σχεδίαση συστημάτων αυτομάτου και ιδιαίτερα ΓΧΑ (Γραμμικών Χρονικά Αναλλοίωτων συστημάτων).
Ο μετασχηματισμός Laplace μετασχηματίζει συναρτήσεις από το πεδίο του χρόνου (t) στο πεδίο της μιγαδικής συχνότητας s:
Η λογική της χρήσης του μετασχηματισμού Laplace είναι αντίστοιχη με τη λογική της χρήσης του μετασχηματισμού Fourier στα τηλεπικοινωνιακά συστήματα. Η διαφορά έγκειται στο γεγονός ότι με τον μετασχηματισμό Laplace μπορούμε να μελετήσουμε και την συμπεριφορά συστημάτων στη μεταβατική κατάσταση και όχι μόνο στη μόνιμη κατάσταση (για αυτό και χρησιμοποιείται η μιγαδική μεταβλητή s = σ + jω, αντί της φανταστικής μεταβλητής jω του μετασχηματισμού Fourier)
Η βασική χρήση του μετασχηματισμού Laplace είναι για τη λύση ολοκληρωδιαφορικών εξισώσεων ΓΧΑ συστημάτων. Μέσω του μετασχηματισμού οι εξισώσεις αυτές μετατρέπονται σε αλγεβρικές των οποίων η επίλυση είναι ευκολότερη.
Ο μετασχηματισμός Laplace χρησιμοποιείται όμως και για την μελέτη της ευστάθειας και τη σχεδίαση Σ.Α.Ε (όπως για παράδειγμα με τη μέθοδο του Γεωμετρικού Τόπου Ριζών).
03.2 Ο Μετασχηματισμός Laplace
Έστω η πραγματική συνάρτηση f(t) της πραγματικής μεταβλητής t (π.χ χρόνος). Ο μετασχηματισμός Laplace της συνάρτησης f(t) δίνεται από τη σχέση:
0
)()()]([ dtetfsFtfL st (03.1)
Ο μετασχηματισμός Laplace της συνάρτησης f(t) υπάρχει εφόσον το ολοκλήρωμα
0
0)( dtetfI t (03.2)
συγκλίνει για κάποιο πραγματικό αριθμό σ0, δηλαδή ισχύει Ι <+∞.
03.2.1 Παράδειγμα
Ο μετασχηματισμός Laplace της συνάρτησης f(t) =e-t υπάρχει διότι το ολοκλήρωμα I υπάρχει για κάθε σ0>-1.
00
)1(
00
)1(
01
1
1
1000
tttt edtedteeI (03.3)
Επομένως ο μετασχηματισμός Laplace L[f(t)] = F(s) της συνάρτησης f(t) =e-t θα είναι:
se
sdtedteesF tstsstt
1
1
1
1)(
0
)1(
0
)1(
0
(03.4)
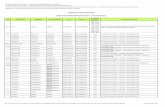
Στο επόμενο σχήμα (Σχήμα 3.1) δίνεται η φιλοσοφία της χρήσης του μετασχηματισμού Laplace στη μελέτη των συστημάτων Σ.Α.Ε. Συγκεκριμένα πολλά ΓΧΑ Σ.Α.Ε περιγράφονται από σχέσεις της μορφής:

)()(
0
tudt
tyda
n
iii
i
(03.5)
των οποίων η επίλυση είναι δυσχερής. Η χρήση του μετασχηματισμού Laplace απλοποιεί τη διαδικασία επίλυσης:
Σχήμα 3.1: Παράδειγμα χρήσης του μετασχηματισμού Laplace
03.2.2 Ο αντίστροφος μετασχηματισμός Laplace
Έστω F(s) ο μετασχηματισμός Laplace L[f(t)] της συνάρτησης f(t). Η συνάρτηση f(t) υπολογίζεται από τον αντίστροφο μετασχηματισμό Laplace L-1[F(s)]=f(t) με τη βοήθεια του επικαμπύλιου ολοκληρώματος:
jc
jc
stdsesFj
tfsFL )(2
1)()]([1
(03.6)
για c πραγματικό αριθμό τέτοιο ώστε c>σ0.
Στη πράξη και εξαιτίας της δυσκολίας υπολογισμού του παραπάνω ολοκληρώματος ο αντίστροφος μετασχηματισμός Laplace υπολογίζεται με ανάλυση σε μερικά κλάσματα και χρήση γνωστών ζευγών του μετασχηματισμού Laplace. Αν δηλαδή ο μετασχηματισμός Laplace F(s) μιας συνάρτησης f(t) έχει τη μορφή (δηλαδή εκφράζεται ως ρητή συνάρτηση):
011
1
011
1
...
...
)(
)()(
asasas
bsbsbsb
sa
sbsF
nn
n
mm
mm
(03.7)
τότε η συνάρτηση F(s) αναλύεται σε μερικά κλάσματα ως εξής:
n
n
s
c
s
c
s
c
sa
sbsF
...
)(
)()(
2
2
1
1 (03.8)
όπου λ1≠ λ2≠ ... ≠ λn οι ρίζες του πολυωνύμου a(s).
Για κλάσματα της μορφής i
i
s
c
ο αντίστροφος μετασχηματισμός Laplace είναι γνωστός.
Συγκεκριμένα ο αντίστροφος μετασχηματισμός Laplace της F(s) είναι:
tn
tt necececsFL ...)]([ 2121
1 (03.9)
Σημείωση: Για την διευκόλυνση ανάλυσης συναρτήσεων σε μερικά κλάσματα μπορείτε να χρησιμοποιείτε τις συναρτήσεις residue και roots της Matlab.

03.2.3 Παρaδείγματα υπολογισμού του αντίστροφου μετασχηματισμού Laplace
Παράδειγμα 1: Διακριτές ρίζες
Η απόκριση y(t) ενός συστήματος αυτομάτου ελέγχου σε είσοδο u(t) = δ(t) έχει υπολογιστεί μέσω του μετασχηματισμού Laplace και συγκεκριμένα αντιστοιχεί στη συνάρτηση:
23
22)(
2
2
ss
sssY
Να υπολογιστεί η y(t).
Λύση
Μετά από χρήση της συνάρτησης residue της Matlab προκύπτει η εξής ανάλυση της συνάρτησης σε μερικά κλάσματα:
2
2
1
11
2123
22)( 21
02
2
sss
r
s
rr
ss
sssY
και επομένως η συνάρτηση y(t) είναι:
tt eetsYLty 21 2)()]([)( .
Παράδειγμα 2: Πολλαπλότητα ριζών
Η απόκριση y(t) ενός συστήματος αυτομάτου ελέγχου σε είσοδο u(t) = us(t) έχει υπολογιστεί μέσω του μετασχηματισμού Laplace και συγκεκριμένα αντιστοιχεί στη συνάρτηση:
254
1)(
23
ssssY
Να υπολογιστεί η y(t).
Λύση
Μετά από χρήση της συνάρτησης residue της Matlab προκύπτει η εξής ανάλυση της συνάρτησης σε μερικά κλάσματα:
2
1
)1(
1
1
1
2)1(1)2()1(
1
254
1)(
23
221
0223
ssss
r
s
r
s
rr
ssssssY
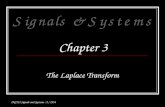
και επομένως η συνάρτηση y(t) είναι:
ttt eetesYLty 21 )]([)(
Παράδειγμα 3: Μιγαδικές ρίζες
Η απόκριση y(t) ενός συστήματος αυτομάτου ελέγχου σε είσοδο u(t) = δ(t) έχει υπολογιστεί μέσω του μετασχηματισμού Laplace και συγκεκριμένα αντιστοιχεί στη συνάρτηση:
595
4
)(
)()(
23
ssssa
sbsY
Να υπολογιστεί η y(t).
Λύση
Μετά από χρήση της συνάρτησης roots της Matlab προκύπτει ότι οι ρίζες του πολυωνύμου a(s) είναι -1, -2+j, -2-j. Άρα το Y(s) γράφεται ως:
)54(1)1)(54(
1
595
1)(
2321
223 ss
rsr
s
r
sssssssY
1)2(
12
1)2(
)2(2
1
12
)54(
62
1
2222
ss
s
sss
s
s

και επομένως η συνάρτηση y(t) είναι:
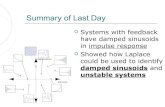
)sin(cos22)]([)( 21 tteesYLty tt
Σχήμα 3.2: Η μορφή της συνάρτησης y(t) του παραδείγματος 2
0 1 2 3 4 5 6 7 8 9 100
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
t - time in sec
f(t)
- r
esp
onse
to
dir
ac
fun
ctio
n
Σχήμα 3.3: Η μορφή της συνάρτησης y(t) του παραδείγματος 3
0 1 2 3 4 5 6 7 8 9 100
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
t - time in sec
f(t)
- r
espo
nse
to d
irac
func
tion

03.3 Ιδιότητες του Μετασχηματισμού Laplace
Ιδιότητα 1: Γραμμικότητα:
(α) L[α1f1(t)+α2f2(t)]=α1F1(s)+ α2F2(s), όπου α1, α2 σταθερές
(β) L-1[b1F1(s)+b2F2(s)]=b1f1(t)+b2f2(t), όπου b1, b2 σταθερές
Ιδιότητα 2: Παραγώγιση στο πεδίο του χρόνου:
)0()()(
fssFdt
tdfL
01
1
02
23
0
21 )(...
)()()0()(
)(
tn
n
t
n
t
nnnn
n
dt
tfd
dt
tfds
dt
tdfsfssFs
dt
tfdL
Ιδιότητα 3: Ολοκλήρωση στο πεδίο του χρόνου:
0
0
)(1)(
)( dfss
sFdfL
t
Ιδιότητα 4: Θεώρημα αρχικής τιμής:
)(lim)(iml0
ssFtfst
, t>0
Ιδιότητα 5: Θεώρημα τελικής τιμής:
)(lim)(iml0
ssFtfst
, εφόσον το όριο )(iml tft
υπάρχει
Ιδιότητα 6: Αλλαγή κλίμακας χρόνου:
)(asaFa
tfL
, όπου α σταθερά
Ιδιότητα 7: Αλλαγή κλίμακας μιγαδικής συχνότητας:
)(1 atafa
sFL
Ιδιότητα 8: Χρονική καθυστέρηση:
)(sFeTtfL sT , όπου Τ>0, και f(t-T)=0 για t≤T.

Ιδιότητα 9: Μιγαδική μετατόπιση:
)(1 tfeasFL at , όπου Τ>0, και f(t-T)=0 για t≤T.
Ιδιότητα 10: Παραγώγιση στο πεδίο της συχνότητας:
)]([)(
ttfLds
sdF
)]([)1()(
tftLds
sFd nnn
n
Ιδιότητα 11: Ολοκλήρωση στο πεδίο της συχνότητας:
s
dwwFt
tfL )(
)(
Ιδιότητα 12: Συνέλιξη στο πεδίο του χρόνου:
)()()()()()()()( 211
0
12
0
2121 sFsFLdtffdtfftftftt
03.4 Ζεύγη του Μετασχηματισμού Laplace
Συνάρτηση Μετασχηματισμός Laplace
δ(t) 1
δ(t-t0) 0ste
us(t) s
1
t 2
1
s
atte 2)(
1
as
nt 1
!ns
n
ate as
1
sin(ωt) 22 s
cos(ωt) 22 s
s
)sin( te at 22)( as
)cos( te at 22)(
as
as
Πίνακας 3.1: Ζεύγη Μετασχηματισμών Laplace

03.5 Συναρτήσεις μεταφοράς
Όπως έχει ήδη αναφερθεί τα ΓΧΑ Σ.Α.Ε περιγράφονται από σχέσεις της μορφής:
m
j
j
j
n
iii dtj
tudb
dt
tyda
i
00
)()( (03.10)
Εφαρμόζοντας μετασχηματισμό Laplace στην παραπάνω σχέση (βλέπε Ιδιότητα 2) προκύπτει:
m
j tq
qqj
q
qjjj
n
i tk
ki
k
kiii
dt
tudssUsb
dt
tydssYsa
0 00
1
0 0
1
0
1 )()(
)()( (03.11)
από την οποία λύνοντας ως προς Y(s) παίρνουμε:
n
i
ii
n
i tk
ki
k
ki
n
i
ii
m
j tq
qqj
q
qj
n
i
ii
m
j
jj
sa
dt
tyds
sa
dt
tuds
sU
sa
sb
sY
0
0 0
1
0
1
0
0 00
1
0
0
)()(
)()( (03.12)
Η έξοδος y(t) λαμβάνεται υπολογίζοντας τον αντίστροφο μετασχηματισμό Laplace της Y(s). Ο πρώτος και δεύτερος όρος στην παραπάνω σχέση αντιστοιχούν στη διεγερμένη απόκριση του συστήματος (forced response) ενώ ο τρίτος στην ελεύθερη απόκριση (free response). Είναι φανερό ότι η διεγερμένη απόκριση εξαρτάται από την είσοδο που επιβάλλεται στο σύστημα (προφανώς και από τα χαρακτηριστικά του συστήματος) ενώ η ελεύθερη απόκριση εξαρτάται από την αρχική (εσωτερική) κατάσταση του συστήματος (προφανώς και από τα χαρακτηριστικά του συστήματος).
Όταν οι αρχικές συνθήκες της εξόδου και της εισόδου είναι ίσε με μηδέν, δηλαδή ισχύει
qkdt
tud
dt
tyd
tq
q
tk
k
,,0)(
,0)(
00
, τότε η σχέση (03.12) εκφυλίζεται στη σχέση
)()()()()(
0
0 sUsHsYsU
sa
sb
sYn
i
ii
m
j
jj
(03.13)
όπου )(
)(
)(
)()(
0
0
sa
sb
sa
sb
sU
sYsH
n
i
ii
m
j
jj
είναι γνωστή και ως συνάρτηση μεταφοράς του συστήματος. Το
δε a(s) ονομάζεται χαρακτηριστικό πολυώνυμο του συστήματος.